Перекрестная ссылка на родственные заявки
Настоящая заявка испрашивает преимущество по предварительной заявке США № 62/786,429, поданной 29 декабря 2018 г., содержание которой полностью включено в настоящий документ посредством ссылки.
Предпосылки создания изобретения
Системы кодирования видеосигналов широко применяют для сжатия цифровых видеосигналов для уменьшения потребностей в хранении и/или ширины полосы передачи таких сигналов. Среди различных типов систем кодирования видеосигналов, таких как системы на основе блоков, на основе вейвлетов и системы на основе объектов, широко используют и развертывают гибридные системы видеокодирования на основе блоков. Для выполнения кодирования видеосигналов можно использовать различные методики кодирования видеосигналов, включающие в себя, например, прогнозирование вектора движения на основании предыстории. При этом может отсутствовать потенциальное взаимодействие методик кодирования видеосигналов с другими инструментами кодирования, включенными в стандарт кодирования видеосигналов. В результате может значительно снизиться эффективность методов кодирования видеосигналов.
Изложение сущности изобретения
Приведено описание систем, способов и средств для выполнения прогнозирования вектора движения на основании предыстории (HMVP). Устройство кодирования видеосигналов может генерировать список HMVP-прогнозов для текущего блока. Устройство кодирования видеосигналов может выводить потенциальный HMVP-прогноз из ранее закодированного блока. Потенциальный HMVP-прогноз может включать в себя информацию о движении, связанную с ранее закодированным блоком (например, соседним блоком по отношению к текущему блоку), одним или более стандартными индексами и весовым индексом двунаправленного прогнозирования. Информация о движении может включать в себя по меньшей мере один или более векторов движения. Весовой индекс двунаправленного прогнозирования может включать в себя один или более весовых индексов, связанных с соседним блоком. К сигналу прогнозирования, генерируемому путем выполнения прогнозирования с компенсацией движения текущего блока, можно применять один или более весовых индексов.
Устройство кодирования видеосигналов может добавлять потенциальный HMVP-прогноз в список HMVP-прогнозов для прогнозирования вектора движения, связанного с текущим блоком, с компенсацией движения. Устройство кодирования видеосигналов может использовать HMVP-прогноз, выбранный из списка HMVP-прогнозов, для выполнения прогнозирования текущего блока с компенсацией движения. Прогнозирование с компенсацией движения можно выполнять с использованием информации о движении, связанной с соседним блоком по отношению к текущему блоку, одним или более стандартными индексами и весовым индексом двунаправленного прогнозирования.
Устройство кодирования видеосигналов может выполнять сокращение, определяя, идентичен ли потенциальный HMVP-прогноз HMVP-прогнозу в списке HMVP-прогнозов для текущего блока. Если потенциальный HMVP-прогноз идентичен какому-либо из HMVP-прогнозов в списке HMVP-прогнозов, устройство кодирования видеосигналов может удалять HMVP-прогноз из списка HMVP-прогнозов. Устройство кодирования видеосигналов может добавлять потенциальный HMVP-прогноз в конец списка HMVP-прогнозов. Устройство кодирования видеосигналов может перемещать один или более HMVP-прогнозов после удаления HMVP-прогноза из списка HMVP-прогнозов на одну позицию вперед. В примере потенциальный HMVP-прогноз можно считать идентичным HMVP-прогнозу в списке HMVP-прогнозов, если потенциальный HMVP-прогноз и HMVP-прогноз в списке HMVP-прогнозов имеют одинаковые векторы движения и одинаковые стандартные индексы. В примере потенциальный HMVP-прогноз можно считать идентичным HMVP-прогнозу в списке HMVP-прогнозов, если потенциальный HMVP-прогноз и HMVP-прогноз в списке HMVP-прогнозов имеют одинаковые векторы движения, одинаковые стандартные индексы и одинаковые веса обобщенного двунаправленного прогнозирования (GBi) или двунаправленного прогнозирования с весовыми индексами для уровня блока кодирования (CU) (BCW).
Если потенциальный HMVP-прогноз не идентичен любому из HMVP-прогнозов в списке HMVP-прогнозов, устройство кодирования видеосигналов может удалять самую старую запись HMVP-прогноза в списке HMVP-прогнозов, например, если список HMVP-прогнозов заполнен. Устройство кодирования видеосигналов может добавлять потенциальный HMVP-прогноз в конец списка HMVP-прогнозов. Устройство кодирования видеосигналов может сбрасывать список HMVP-прогнозов в начале кодирования новой строки элемента кодового дерева (CTU).
Краткое описание графических материалов
На фиг. 1 представлен пример схемы видеокодера на основании блоков.
На фиг. 2 представлены примеры разделений блоков в многотипной древовидной структуре.
На фиг. 3 представлен пример схемы видеодекодера на основании блоков.
На фиг. 4 представлен пример процедуры кодирования при прогнозировании вектора движения на основании предыстории (HMVP).
На фиг. 5 представлен пример прогнозирования с компенсацией движения на основании разделения на диагональные треугольники и пример прогнозирования с компенсацией движения на основании разделения на обратные диагональные треугольники.
На фиг. 6 представлен пример генерирования векторов движения (MV) для однонаправленного прогнозирования, например, в режиме треугольников.
На фиг. 7 представлен пример блок-схемы для генерирования списка векторов MV для однонаправленного прогнозирования на основании одного или более кандидата на слияние.
На фиг. 8A представлен пример добавления потенциального HMVP-прогноза в список HMVP-прогнозов с учетом веса GBi.
На фиг. 8B представлен пример добавления потенциального HMVP-прогноза в список HMVP-прогнозов с использованием схемы последовательного обслуживания (FIFO).
На фиг. 9 представлен пример добавления потенциального HMVP-прогноза в список HMVP-прогнозов.
На фиг. 10 представлен пример блок-схемы для генерирования списка MV для однонаправленного прогнозирования в режиме треугольников на основании пространственно-временных кандидатов и потенциальных HMVP-прогнозов.
На фиг. 11 представлен пример блок-схемы для генерирования списка MV для однонаправленного прогнозирования в режиме треугольников на основании перемежения MV пространственно-временных кандидатов для однонаправленного прогнозирования и потенциальных HMVP-прогнозов.
На фиг. 12A представлена системная схема примера системы связи, в которой может быть реализован один или более описанных вариантов осуществления.
На фиг. 12B представлена системная схема примера модуля беспроводной передачи/приема (WTRU), который можно использовать в системе связи, представленной на фиг. 12A.
На фиг. 12C представлена системная схема примера сети радиодоступа (RAN) и примера опорной сети (CN), которые можно использовать в системе связи, представленной на фиг. 12A.
На фиг. 12D представлена системная схема дополнительного примера RAN и дополнительного примера сети CN, которые можно использовать в системе связи, представленной на фиг. 12A.
Подробное описание
Далее приведено подробное описание иллюстративных вариантов осуществления со ссылкой на различные фигуры. Хотя в настоящем описании приведены подробные примеры возможных вариантов реализации, следует отметить, что данное подробное описание приведено в качестве примера и ни в коей мере не ограничивает объем заявки.
Одно или более устройств кодирования видеосигналов в системе кодирования видеосигналов могут сжимать цифровые видеосигналы, например, для уменьшения занимаемого в памяти места и/или ширины полосы передачи, связанной с хранением и/или доставкой таких сигналов. Устройство кодирования видеосигналов может быть основано на гибридной системе кодирования видеосигналов на основе блоков. Может применяться многотипная древовидная структура разделения блоков. Могут быть включены один или более модулей кодирования, например, модуль внутреннего прогнозирования, модуль внешнего прогнозирования, модуль преобразования/обратного преобразования и модуль квантования/деквантования. Устройство кодирования видеосигналов может включать в себя петлевые фильтры.
Устройство кодирования видеосигналов может включать в себя один или более инструментов кодирования с возможностями обеспечения более высокой эффективности кодирования и умеренной сложности внедрения. Инструменты кодирования могут включать в себя одно или более из следующего: аффинная модель движения, альтернативное временное прогнозирование вектора движения (ATMVP), целочисленный вектор движения (IMV), обобщенное двунаправленное прогнозирование (GBi) или двунаправленное прогнозирование с весовыми индексами для уровня CU (BCW), двунаправленный оптический поток (BDOF), комбинированное внешнее слияние / внутреннее прогнозирование, слияние с разностью векторов движения (MMVD), кандидат на слияние попарного среднего, внешнее прогнозирование по типу треугольника для внешнего кодирования; кросс-компонентная линейная модель (CCLM), многолинейное внутреннее прогнозирование, обращение к текущему изображению (CPR) для внутреннего прогнозирования; улучшенное многократное преобразование (EMT), зависимое квантование для кодирования с квантованием и кодирования с преобразованием и адаптивная контурная фильтрация (ALF) для петлевых фильтров.
Пример системы кодирования видеосигналов на основании блоков может включать в себя гибридную систему кодирования видеосигналов на основе блоков. На фиг. 1 представлен пример блок-схемы гибридной системы кодирования видеосигналов на основе блоков. Как показано на фиг. 1, входной видеосигнал 1002 может быть обработан поблочно. Расширенные размеры блоков (например, называемых блоком кодирования или CU) можно использовать для сжатия видеосигналов высокого разрешения (например, 1080 пкс. и/или более). CU может иметь размер до 128x128 пикселей. Блоки могут быть разделены на основании тетрарной древовидной структуры. Элемент кодового дерева (CTU) может быть разделен на блоки CU для адаптации к разным локальным характеристикам на основании тетрарной/бинарной/тернарной древовидной структуры. CU может быть разделен на единицы прогнозирования или PU, к которым можно применять отдельные прогнозы. CU можно использовать (например, можно всегда использовать) в качестве базовой единицы для прогнозирования и преобразования без дополнительных разделений. В древовидной структуре множественного типа элемент (например, один) CTU может быть разделен (например, сначала разделен) с применением тетрарной древовидной структуры. Концевой узел тетрарной древовидной структуры (например, каждый листовой узел тетрарной древовидной структуры) может быть дополнительно разделен с применением бинарной и тернарной древовидной структуры. Как показано на фиг. 2, существуют один или более (например, пять) типов разделения, включая, например, тетрарное разделение, горизонтальное бинарное разделение, вертикальное бинарное разделение, горизонтальное тернарное разделение и вертикальное тернарное разделение.
Как показано на фиг. 1, для входного видеоблока (например, макроблока (MB) и/или CU) может быть выполнено пространственное прогнозирование 1060 или временное прогнозирование 1062. Пространственное прогнозирование 1060 (например, внутреннее прогнозирование) может использовать пиксели из семплов закодированных соседних блоков (например, эталонных семплов) в видеоизображении/срезе для прогнозирования текущего видеоблока. Пространственное прогнозирование 1060 может снижать пространственную избыточность, например, которая может быть характерной для видеосигнала. Прогнозирование 1062 движения (например, внутреннее прогнозирование и/или временное прогнозирование) может использовать восстановленные пиксели из закодированных видеоизображений, например, для прогнозирования текущего видеоблока. Прогнозирование 1062 движения может снижать временную избыточность, например, которая может быть характерной для видеосигнала. Сигналы прогнозирования движения (например, сигнал временного прогнозирования) для видеоблока (например, CU) можно передавать посредством одного или более векторов движения (MV). MV могут указывать величину и/или направление движения между текущим блоком и/или эталонным блоком текущего блока или его временным эталонным блоком. Если поддерживается множество эталонных изображений для (например, каждого) видеоблока, индекс эталонного изображения видеоблока может быть отправлен кодером. Индекс эталонного изображения может быть использован для идентификации того, от какого эталонного изображения, содержащегося в хранилище 1064 эталонных изображений, может происходить сигнал прогнозирования движения.
После пространственного прогнозирования 1060 и/или прогнозирования 1062 движения блок 1080 выбора режима в кодере может определять режим прогнозирования (например, наилучший режим прогнозирования), например, на основании оптимизации соотношения «искажение — скорость передачи данных». Блок прогнозирования может быть вычтен из текущего видеоблока на этапе 1016, и/или остаточное значение прогнозирования может быть декореллировано с помощью преобразования 1004 и/или квантования 1006 для достижения некоторой скорости передачи данных, например, целевой скорости передачи данных. Квантованные остаточные коэффициенты можно подвергать обратному квантованию на этапе 1010 обратного квантования и/или обратному преобразованию на этапе 1012 преобразования, например, для формирования восстановленного остатка, который можно добавлять к блоку прогнозирования на этапе 1026, например, для формирования восстановленного видеоблока. Петлевая фильтрация (например, с использованием фильтра деблокирования и/или адаптивных петлевых фильтров) может быть применена на петлевом фильтре 1066 к восстановленному видеоблоку перед помещением восстановленного видеоблока в хранилище 1064 эталонных изображений и/или использованием для кодирования видеоблоков (например, будущих видеоблоков). Для создания выходного битового потока 1020 видеоданных информация о режиме кодирования (например, внутренний или внешний), информация о режиме прогнозирования, информация о движении и/или квантованные остаточные коэффициенты могут быть отправлены (например, могут быть все отправлены) в модуль 1008 энтропийного кодирования, например, для их сжатия и/или упаковки с созданием битового потока.
На фиг. 3 представлена блок-схема примера системы декодирования видеосигналов на основе блоков для декодера. Битовый видеопоток 1102 (например, битовый видеопоток 1020, показанный на фиг. 1) можно распаковывать (например, сначала распаковывать) и/или энтропийно декодировать в модуле 1108 энтропийного декодирования. Информация о режиме кодирования и прогнозировании может быть отправлена в модуль 1170 пространственного прогнозирования (например, если было выполнено внутреннее кодирование) и/или в модуль 1172 прогнозирования компенсации движения (например, если было выполнено внутреннее кодирование и/или временное кодирование) для формирования блока прогнозирования. Остаточные коэффициенты преобразования могут быть отправлены в модуль 1110 обратного квантования и в модуль 1112 обратного преобразования для восстановления остаточного блока. Блок прогнозирования и/или остаточный блок могут быть одновременно добавлены на этапе 1126. Например, восстановленный блок может быть подвергнут петлевой фильтрации на петлевом фильтре 1176 перед сохранением восстановленного блока в хранилище 1174 эталонных изображений. Восстановленное видео 1120 в хранилище 1174 эталонных изображений может быть использовано для приведения в действие устройства отображения и/или для прогнозирования видеоблоков (например, будущих видеоблоков).
Один или более модулей кодирования, например, модулей кодирования, связанных с внешним прогнозированием, могут быть улучшены для повышения эффективности внешнего кодирования. Например, как описывается в настоящем документе, эффективность кодирования при прогнозировании вектора движения на основании предыстории (HMVP) может быть улучшена.
Векторы MV блоков, связанных с внешним кодированием, могут быть переданы с использованием одного или более механизмов, как описано в настоящем документе. Например, векторы MV блоков, связанных с внешним кодированием, могут быть переданы с использованием режима усовершенствованного прогнозирования вектора движения (AMVP) или режима слияния. В режиме AMVP может быть передана разность между реальным MV и предиктором MV (MVP), стандартным индексом и индексом MVP, относящимся к списку кандидатов AMVP. Для режима слияния можно передавать индекс слияния, относящийся к списку кандидатов на слияние. Информация о движении, связанная с кандидатом на слияние, может быть унаследована от переданного кандидата на слияние. Информацию о движении, например, для AMVP и кандидатов на слияние, можно выводить из пространственных блоков, соседних с CU. Например, пространственные блоки могут непосредственно соседствовать (например, могут быть смежными) с текущим CU или совмещенным блоком во временном эталонном изображении. Один или более кандидатов на слияние (например, до 6 кандидатов на слияние) и один или более потенциальных AMVP (например, до 2 потенциальных AMVP) могут быть добавлены в список кандидатов для прогнозирования вектора движения.
HMVP-прогноз можно использовать для изучения корреляции между векторами MV соседних блоков. Например, HMVP-прогноз можно использовать для изучения корреляции между соседними пространственно несмежными блоками. Хотя в настоящем документе дана ссылка на HMVP, используемое соседними блоками, которые являются пространственно несмежными, специалисту в данной области будет понятно, что соседние блоки могут также включать в себя блоки, которые являются смежными блоками.
В потенциальном HMVP-прогнозе может содержаться информация о движении ранее закодированного CU. Информация о движении может включать в себя одно или более из: векторов MV и индекса эталонного изображения. Таблицу из множества потенциальных HMVP-прогнозов можно хранить в кодере и/или декодере. Таблица потенциальных HMVP-прогнозов может быть сброшена (например, сброшена до пустого состояния) в момент начала кодирования новой линии CTU. После кодирования внешнего CU, который не содержит множества подблоков (например, ATMVP и аффинно кодированные CU), соответствующая информация о движении может быть добавлена к записи (например, последней записи в таблице потенциальных HMVP-прогнозов) на основании какого-либо правила (например, ограниченного правила последовательного обслуживания (FIFO)). Для определения наличия существующего потенциального HMVP-прогноза, который идентичен новому потенциальному движению, можно применять проверку избыточности (например, перед добавлением потенциального движения в таблицу или список кандидатов HMVP-прогнозов). Если будет обнаружен существующий потенциальный HMVP-прогноз, идентичный новому кандидату движения, из таблицы или списка кандидатов HMVP-прогнозов можно удалять идентичный потенциальный HMVP-прогноз, а прочие потенциальные HMVP-прогнозы могут смещаться вперед на одну позицию, например, путем уменьшения индекса таблицы потенциальных HMVP-прогнозов на единицу. На фиг. 4 представлен пример рабочего процесса декодирования при применении HMVP-прогнозирования для прогнозирования векторов MV. Как показано на фиг. 4, на этапе 402 существующие потенциальные HMVP-прогнозы могут быть загружены в список существующих потенциальных HMVP-прогнозов. На этапе 404 MV, связанный с текущим блоком, может быть декодирован на основании потенциальных HMVP-прогнозов. На этапе 406 список потенциальных HMVP-прогнозов может быть обновлен на основании декодированного MV.
Могут быть выполнены обобщенное двунаправленное прогнозирование (GBi) или двунаправленное прогнозирование с весовыми индексами для уровня CU (BCW). Например, GBi или BCW могут быть выполнены для повышения эффективности двунаправленного прогнозирования при прогнозировании одного CU двумя блоками временного прогнозирования из восстановленных эталонных изображений. В режиме двунаправленного прогнозирования сигнал прогнозирования в семпле x может быть рассчитан как среднее по двум сигналам прогнозирования, как показано в уравнении (1).
 (1)
(1)
Согласно уравнению (1): P[x] может представлять собой результирующий сигнал прогнозирования семпла x, который находится в позиции x изображения, P1[x+v1] может представлять собой сигнал x прогнозирования с компенсацией движения, использующий вектор движения (MV) v1 для i-го списка (например, списка 0, списка 1). GBi может применять различные весовые значения (например, w0 и w1) к двум сигналам прогнозирования из списка 0 и списка 1. Одна или более конфигураций w0 и w1 могут подразумевать сходства прогнозирования с однонаправленным прогнозированием и двунаправленным прогнозированием (например, таким же прогнозированием, что и традиционное однонаправленное прогнозирование и двунаправленное прогнозирование). Например, сходства прогнозирования для однонаправленного прогнозирования и двунаправленного прогнозирования могут существовать, когда (w0, w1) равно: (1, 0) для однонаправленного прогнозирования со стандартным списком L0; (0, 1) для однонаправленного прогнозирования со стандартным списком L1; и (0,5, 0,5) для традиционного двунаправленного прогнозирования с двумя стандартными списками. В GBi весовые коэффициенты, применяемые к сигналам прогнозирования из списков L0 и L1, можно передавать для каждого CU. Можно применять ограничение, при котором сумма w0 и w1 должна быть равна 1, например w0 + w1 = 1. Ограничение может быть применено для уменьшения объема служебной информации сигнализации. С учетом такого ограничения может быть передан один весовой коэффициент, а конечный сигнал двойного прогнозирования при применении GBi может быть рассчитан, например, с использованием уравнения (2).
 (2)
(2)
Согласно п. (2) w1 можно дискретизировать, например, с помощью значений {-1/4, 1/4, 3/8, 1/2, 5/8, 3/4, 5/4} так, чтобы каждое весовое значение могло быть указано значением индекса в малом ограниченном диапазоне. Дискретизацию w1 с использованием малого диапазона можно использовать для уменьшения объема служебной информации сигнализации. Весовые значения {1/4, 3/8, 1/2, 5/8, 3/4} могут быть применены к внешнему изображению (например, всем внешним изображениям), а весовые значения {-1/4, 5/4} могут быть применены к изображениям с низкой задержкой. Весовые значения могут быть применены к изображениям с низкой задержкой, которые могут быть спрогнозированы с использованием эталонного изображения, предшествующего текущему изображению в соответствии с порядком отображения.
Может быть выполнено внешнее прогнозирование по типу треугольника. В некотором видеосодержимом (например, естественном видеосодержимом) границы между двумя движущимися объектами могут не являться горизонтальными или вертикальными (например, полностью горизонтальными или вертикальными). Такие негоризонтальные или невертикальные границы может быть сложно аппроксимировать прямоугольными блоками с достаточной точностью. Поэтому прогнозирование по типу треугольника можно применять, например, для создания треугольных разделений к прогнозированию с компенсацией движения. Как показано на фиг. 5, прогнозирование по типу треугольника может разделять CU на одну или более (например, две) единиц прогнозирования по типу треугольника, например, в диагональном направлении (502) или в обратном диагональном направлении (504). Единица прогнозирования по типу треугольника (например, каждая единица прогнозирования по типу треугольника) в CU может быть подвергнута внешнему прогнозированию с использованием ее вектора движения для однонаправленного прогнозирования и индекса эталонного кадра. Вектор движения для однонаправленного прогнозирования и индекс эталонного кадра могут быть выведены из списка кандидатов однонаправленного прогнозирования.
Список кандидатов однонаправленного прогнозирования может включать в себя один или более (например, пять) кандидатов векторов движения для однонаправленного прогнозирования. Кандидаты-векторы движения для однонаправленного прогнозирования могут быть выведены из подобных (например, таких же) пространственно-временных соседних блоков, как те, что используют для процесса слияния (например, процесса слияния HEVC). Кандидаты MV для однонаправленного прогнозирования могут быть выведены из пяти пространственно соседних блоков и двух временно совмещенных блоков, как представлено на фиг. 6. Как показано на фиг. 6, векторы движения семи соседних блоков могут быть собраны и сохранены в списке кандидатов MV для однонаправленного прогнозирования в следующем порядке: вектор движения L0 соседних блоков, вектор движения L1 соседних блоков и среднее по векторам движения L0 и L1 соседних блоков, например, если соседние блоки подвергают двунаправленному прогнозированию. Если количество кандидатов MV меньше пяти, к списку кандидатов MV могут быть добавлены нулевые (0) векторы движения.
На фиг. 7 представлена блок-схема для добавления векторов MV для однонаправленного прогнозирования, связанных с кандидатами на слияние, в список MV для однонаправленного прогнозирования, связанный с CU, кодируемым методом прогнозирования в режиме треугольников. На этапе 702 устройство кодирования видеосигналов может определять, включен ли MV L0 в кандидат на слияние. Если это так, на этапе 704 устройство кодирования видеосигналов может добавлять MV L0, связанный с кандидатом на слияние, в список MV для однонаправленного прогнозирования. На этапе 708 устройство кодирования видеосигналов может проверять, является ли пространственно-временной кандидат последним в списке. На этапе 710 устройство кодирования видеосигналов может определять, включен ли MV L1 в кандидат на слияние. Если это так, на этапе 712 устройство кодирования видеосигналов может добавлять MV L1, связанный с кандидатом на слияние, в список MV для однонаправленного прогнозирования. На этапе 714 устройство кодирования видеосигналов может проверять, является ли пространственно-временной кандидат последним в списке. На этапе 716 устройство кодирования видеосигналов может определять, включены ли MV L0 и L1 в кандидат на слияние. Если это так, на этапе 718 устройство кодирования видеосигналов может добавлять среднее по MV L0 и MV L1, связанное с кандидатом на слияние, в список MV для однонаправленного прогнозирования. На этапе 720 устройство кодирования видеосигналов может проверять, является ли пространственно-временной кандидат последним в списке.
Порядок расположения одного или более соседних блоков (например, порядок проверки блоков-кандидатов и рассмотрения их с точки зрения добавления к списку кандидатов) может включать в себя один или более пространственных соседних блоков (например, с 1 по 5), за которыми следуют один или более временных совмещенных блоков (с 6 по 7). Как показано на фиг. 6, векторы движения семи соседних блоков (например, A1, A0, B0, B1, B2, T0, T1) могут быть собраны и сохранены в списке кандидатов на однонаправленное прогнозирование в соответствии со следующим порядком расположения векторов движения для однонаправленного прогнозирования: вектор движения L0 из векторов движения для двунаправленного прогнозирования, вектор движения L1 из векторов движения для двунаправленного прогнозирования и усредненный вектор движения по векторам движения L0 и L1 для двунаправленного прогнозирования. Если число кандидатов меньше пяти, в список добавляется нулевой вектор движения.
Эффективность кодирования HMVP-прогноза может быть улучшена, например, за счет расширения применения HMVP-прогноза к другим инструментам кодирования, например, обобщенному двунаправленному прогнозированию и/или внешнему прогнозированию по типу треугольника. HMVP-прогноз можно использовать для определения корреляции MV между соседними блоками. Например, HMVP-прогноз можно использовать для определения корреляции MV между соседними пространственно несмежными блоками. Хотя в настоящем документе дана ссылка на HMVP-прогнозирование, используемое для определения корреляции MV между соседними блоками, которые являются пространственно несмежными, специалисту в данной области будет понятно, что соседние блоки могут включать в себя блоки, которые являются смежными блоками. HMVP-прогноз можно использовать для определения корреляции MV путем ведения таблицы из одного или более кандидатов MV. Таблица может находиться на устройстве кодирования и/или устройстве декодирования. Потенциальный HMVP-прогноз может быть определен на основании информации о движении, содержащей одно или более из следующего: вектор движения (например, один или более векторов движения), стандартный список (например, один или более стандартных списков) или индекс эталонного изображения (например, один или более индексов эталонного изображения), связанный с ранее закодированным блоком
В примере потенциальный HMVP-прогноз можно использовать для выведения сигнала прогнозирования CU с отключенным GBi. В таком случае к двум сигналам прогнозирования, связанным со списком 0 и списком 1, могут быть применены равные весовые коэффициенты.
В примере HMVP-прогноз и GBi могут быть реализованы, например, путем связывания GBi с индексом HMVP. GBi может быть обеспечено путем связывания по меньшей мере одного индекса GBi с каждой из записей HMVP-прогноза или индексов HMVP-прогноза. В результате может возрасти эффективность кодирования HMVP-прогноза. Индекс GBi может также называться весовым индексом двунаправленного прогнозирования.
В примере для каждого потенциального HMVP-прогноза в дополнение к информации о движении может быть создан по меньшей мере один индекс GBi на основании одного или более из следующего. Когда потенциальный HMVP-прогноз выводят из внешнего CU, для которой передан вес GBi, вес GBi потенциального HMVP-прогноза может быть задан равным переданному весу GBi. Когда потенциальный HMVP-прогноз выведен из кандидата на пространственное слияние, вес GBi потенциального HMVP-прогноза может быть принят равным весу GBi пространственного кандидата. Когда потенциальный HMVP-прогноз выведен из кандидата на временное слияние, вес GBi потенциального HMVP-прогноза может быть принят равным весу GBi совмещенного блока в совмещенном по времени изображении. Когда потенциальный HMVP-прогноз выводят из среднего кандидата на слияние, вес GBi потенциального HMVP-прогноза может быть принят равным определенному фиксированному значению (например, 0,5).
Как описано в настоящем документе, сокращение может быть выполнено на одном или более разных этапах обработки HMVP-прогноза. Например, сокращение может быть выполнено для удаления избыточных записей в списке HMVP-прогнозов при добавлении кандидата MV или потенциального HMVP-прогноза в список HMVP-прогнозов. В примере сокращение может быть выполнено после определения того, идентична ли запись в списке HMVP-прогнозов кандидату MV или потенциальному HMVP-прогнозу. При обнаружении идентичного кандидата в списке HMVP-прогнозов идентичный HMVP-прогноз удаляют из списка HMVP-прогнозов. В примере потенциальный HMVP-прогноз можно считать идентичным записи HMVP-прогноза в списке HMVP-прогнозов, если информация о движении, связанная с потенциальным HMVP-прогнозом, аналогична информации о движении, связанной с записью HMVP-прогноза в списке HMVP-прогнозов. Сравниваемая информация о движении может включать в себя одно или более из следующего: вектор движения (например, один или более векторов движения), стандартный список (например, один или более стандартных индексов) и индекс эталонного изображения (например, один или более индексов эталонного изображения).
В примере, кроме информации о векторе движения, могут учитываться веса GBi при определении того, следует ли добавлять потенциальный HMVP-прогноз в список потенциальных HMVP-прогнозов. На фиг. 8A представлен пример, в котором вес GBi можно рассматривать при добавлении потенциального HMVP-прогноза в список потенциальных HMVP-прогнозов. Как показано на фиг. 8A, вторая запись из списка HMVP-прогнозов и новый потенциальный HMVP-прогноз, добавляемый в список HMVP-прогнозов, могут рассматриваться как идентичные, когда информация о движении и веса GBi второй записи из существующего списка HMVP-прогнозов (например, P1 HMV) аналогичны информации о движении и весам GBi нового потенциального HMVP-прогноза (например, Cl-1). В таком примере перед добавлением потенциального HMVP-прогноза, Cl-1, в конец списка HMVP-прогнозов сопоставимую запись HMVP-прогноза, HMVP1, из списка HMVP-прогнозов можно удалять из списка, а записи HMVP-прогнозов, следующие после определенных записей HMVP-прогнозов (например, от HMVP2 до HMVPl-1), можно перемещать вперед, как указано стрелками. Этого можно достичь, например, путем уменьшения соответствующих индексов на единицу.
На фиг. 8B представлен пример, в котором потенциальный HMVP-прогноз можно рассматривать как не идентичный записи в списке HMVP-прогнозов. Как показано на фиг. 8B, хотя информация о движении HMVP1 и Cl-1 одинакова, HMVP1 и Cl-1 считаются неидентичными, поскольку их соответствующие веса GBi не равны друг другу. Может быть применена процедура FIFO (например, стандартная процедура FIFO). Как показано на фиг. 8B, процедура FIFO может включать в себя удаление первого потенциального HMVP-прогноза (например, HMVP0) из таблицы, смещение позиции каждой записи на одну, как указано стрелками на фиг. 8B, так, чтобы создать пустую позицию в конце списка HMVP-прогнозов, и добавление нового кандидата Cl-1 в пустую позицию в конце списка HMVP-прогнозов.
Потенциальные HMVP-прогнозы (например, каждый из которых может быть связан с весом GBi, соответственно) могут быть использованы в качестве кандидатов для режима слияния и/или режима AMVP. Потенциальные HMVP-прогнозы (например, все потенциальные HMVP-прогнозы от последней записи до первой записи в таблице HMVP-прогнозов) могут быть вставлены, например, после потенциального TMVP. При применении HMVP-прогноза к режиму слияния можно применять сокращение для удаления кандидатов с подобной (например, одинаковой) информацией о движении и подобным (например, одинаковым) весом GBi.
Индексы GBi можно использовать для процесса прогнозирования с компенсацией движения и сокращения HMVP-прогноза. Благодаря процессу прогнозирования с компенсацией движения и сокращения HMVP-прогноза можно увеличивать эффективность кодирования и повышать сложность процесса сокращения. Сложность процесса сокращения HMVP-прогноза может возрастать из-за проверки информации о движении и весов GBi в потенциальных HMVP-прогнозах (например, в каждом потенциальном HMVP-прогнозе из списка). В примере вес GBi каждого из потенциальных HMVP-прогнозов (например, всех потенциальных HMVP-прогнозов) может быть использован для прогнозирования с компенсацией движения. Для процесса сокращения HMVP-прогноза можно использовать подмножество потенциальных HMVP-прогнозов. Как описано в настоящем документе, потенциальный HMVP-прогноз может быть связан с индексом GBi (например, каждый потенциальный HMVP-прогноз может быть связан с одним индексом GBi). Связанный вес GBi можно использовать для генерирования сигнала прогнозирования CU (например, вместо определения, идентичны ли два потенциальных HMVP-прогноза).
На фиг. 9 представлен один пример добавления потенциального HMVP-прогноза в список HMVP-прогнозов, причем при добавлении потенциального HMVP-прогноза в список HMVP-прогнозов вес GBi можно не рассматривать. В примере, представленном на фиг. 9, индексы GBi во второй записи существующего списка HMVP-прогнозов (например, HMVP1) и новом потенциальном HMVP-прогнозе (например, Cl-1) не одинаковы, хотя информация о движении во второй записи существующего списка HMVP-прогнозов (например, HMVP1) и новом потенциальном HMVP-прогнозе (например, Cl-1) совпадает. В этом примере, если информация о движении во второй записи существующего списка HMVP-прогнозов (например, HMVP1) и новом потенциальном HMVP-прогнозе (например, Cl-1) одинакова, а индексы GBi во второй записи существующего списка HMVP-прогнозов (например, HMVP1) и новом потенциальном HMVP-прогнозе (например, Cl-1) не совпадают, вторая запись в списке HMVP-прогнозов и новый потенциальный HMVP-прогноз могут рассматриваться как идентичные. Как показано на фиг. 9, HMVP1 можно удалять из списка потенциальных HMVP-прогнозов, тогда последующий потенциальный HMVP-прогноз (например, от HMVP2 до HMVPl-1) можно перемещать вперед, например, за счет уменьшения индексов на единицу, как показано стрелками. Затем можно добавлять Cl–1 в конец списка HMVP-прогнозов.
Внешнее прогнозирование по типу треугольника может быть выполнено с помощью HMVP-прогнозирования. При внешнем прогнозировании по типу треугольника векторы MV в списке потенциальных однонаправленных прогнозов могут быть выведены на основании временных и пространственных соседей. Например, традиционные пространственные и временные соседи могут представлять собой соседей, используемых для режима слияния HEVC. Например, при внешнем прогнозировании по типу треугольника векторы MV в списке потенциальных однонаправленных прогнозов могут быть выведены на основании пяти пространственных соседей и двух временных соседей, как показано на фиг. 6. В примере при выведении MV может не учитываться корреляция между векторами MV блоков, которые не являются непосредственными пространственными соседями (например, несмежными блоками). В таком случае при выведении MV могут не быть сгенерированы точные кандидаты MV при однонаправленном прогнозировании (например, наиболее точные кандидаты MV при однонаправленном прогнозировании) для захвата истинного движения двух треугольных разделений. В примере информация о движении соседних блоков вдоль границы окклюзии может не находиться в прямой зависимости (например, из-за окклюдирующих объектов, которые в общем случае могут существовать в содержимом, таком как естественное видеосодержимое). Если информация о движении соседних блоков вдоль границы окклюзии не находится в прямой зависимости, векторы MV от пространственных соседей на границе окклюзии могут быть неточными (например, недостаточно точными) для функционирования в качестве предиктора MV текущего CU. В результате может снизиться эффективность внешнего кодирования. В примере потенциальные HMVP-прогнозы (например, отличные от существующих пространственных и временных кандидатов MV) можно использовать для выведения списка кандидатов MV для однонаправленного прогнозирования для прогнозирования в режиме треугольников, например, для изучения зависимости между векторами MV одного или более соседних блоков (например, пространственно несмежных блоков).
Векторы MV для однонаправленного прогнозирования, связанные с потенциальными HMVP-прогнозами, могут быть размещены в различных позициях списка кандидатов (например, конечного списка кандидатов) векторов MV для однонаправленного прогнозирования в режиме треугольников. В примере векторы MV для однонаправленного прогнозирования, связанные с одним или более потенциальными HMVP-прогнозами, могут быть проверены и введены в список после пространственных и/или временных кандидатов. Векторы MV, связанные с потенциальным HMVP-прогнозом, могут быть проверены (например, проверено, идентичен ли вектор MV потенциального HMVP-прогноза вектору MV из списка MV для однонаправленного прогнозирования) и вставлены в список кандидатов для однонаправленного прогнозирования (например, после пространственных и временных кандидатов). Векторы MV потенциальных блоков могут быть собраны в порядке, при котором сначала идут пять пространственных соседей (например, A1, A0, B1, B0 и B2), а затем — два временных соседа (например, T0 и T1), как показано на фиг. 6, и N потенциальных HMVP-прогнозов.
Векторы MV для однонаправленного прогнозирования, которые используют для режима треугольников, могут быть сгенерированы, как описано в настоящем документе. В примере векторы MV для однонаправленного прогнозирования, используемые для режима треугольников, могут быть сгенерированы путем добавления векторов MV L0, связанных с одним или более пространственными/временными кандидатами и потенциальными HMVP-прогнозами. В примере векторы MV для однонаправленного прогнозирования, используемые для режима треугольников, могут быть сгенерированы путем добавления векторов MV L1, связанных с одним или более пространственными/временными кандидатами и потенциальными HMVP-прогнозами. В примере векторы MV для однонаправленного прогнозирования, используемые для режима треугольников, могут быть сгенерированы путем добавления среднего по векторам MV L0 и L1 для пространственных/временных кандидатов и потенциальных HMVP-прогнозов, например, если потенциальный HMVP-прогноз представляет собой двунаправленное прогнозирование.
На фиг. 10 представлен пример, связанный со вставкой векторов MV для однонаправленного прогнозирования кандидатов на слияние в список MV для однонаправленного прогнозирования CU по типу треугольников. Как показано на фиг. 10, на этапе 1030 устройство кодирования видеосигналов может определять, включен ли MV L0 в кандидат (например, кандидат на i-е слияние). Если это так, на этапе 1032 устройство кодирования видеосигналов может добавлять MV L0, связанный с кандидатом, в список MV для однонаправленного прогнозирования. На этапе 1034 устройство кодирования видеосигналов может проверять, является ли пространственный/временной кандидат или потенциальный HMVP-прогноз последним в списке. На этапе 1036 устройство кодирования видеосигналов может определять, включен ли MV L1 в кандидат. Если это так, на этапе 1038 устройство кодирования видеосигналов может добавлять MV L1 кандидата в список MV для однонаправленного прогнозирования. На этапе 1040 устройство кодирования видеосигналов может проверять, является ли пространственный/временной кандидат или потенциальный HMVP-прогноз последним в списке. На этапе 1042 устройство кодирования видеосигналов может определять, включены ли векторы MV L0 и L1 в кандидат. Если это так, на этапе 1044 устройство кодирования видеосигналов может добавлять среднее по векторам MV L0 и L1, связанным с кандидатом, в список MV для однонаправленного прогнозирования. На этапе 1046 устройство кодирования видеосигналов может проверять, является ли пространственный/временной кандидат или потенциальный HMVP-прогноз последним в списке.
Движение (например, информация о движении) пространственных и временных соседей может находиться в прямой зависимости с движением (например, информацией о движении) текущего CU (например, в большей степени находиться в прямой зависимости, чем движение в потенциальных HMVP-прогнозах). Векторы MV для однонаправленного прогнозирования пространственных и временных кандидатов могут иметь более высокие приоритеты, чем векторы MV для однонаправленного прогнозирования потенциальных HMVP-прогнозов (например, для уменьшения объема служебной информации в потенциальных векторах MV для сигнализации). В примерах векторы MV для однонаправленного прогнозирования пространственно-временных кандидатов могут перемежаться с векторами MV для однонаправленного прогнозирования потенциальных HMVP-прогнозов.
Можно генерировать список MV для однонаправленного прогнозирования (например, конечный список MV для однонаправленного прогнозирования) CU по типу треугольников. В примере список MV для однонаправленного прогнозирования CU по типу треугольников можно генерировать путем вставки MV L0 каждого пространственного/временного кандидата в список MV для однонаправленного прогнозирования. В примере список MV для однонаправленного прогнозирования CU по типу треугольников можно генерировать путем вставки MV L1 каждого пространственного/временного кандидата в список MV для однонаправленного прогнозирования. В примере список MV для однонаправленного прогнозирования CU по типу треугольников можно генерировать путем вставки MV L0 каждого потенциального HMVP-прогноза в список MV для однонаправленного прогнозирования. В примере список MV для однонаправленного прогнозирования CU по типу треугольников можно генерировать путем вставки MV L1 каждого потенциального HMVP-прогноза в список MV для однонаправленного прогнозирования.
В примере список MV для однонаправленного прогнозирования CU по типу треугольников можно генерировать путем вставки среднего по векторам MV L0 и L1 для пространственного/временного кандидата (например, каждого пространственного/ временного кандидата, если кандидат представляет собой двунаправленное прогнозирование) в список MV для однонаправленного прогнозирования. В примере список MV для однонаправленного прогнозирования CU по типу треугольников можно генерировать путем вставки среднего по векторам MV L0 и L1 для потенциального HMVP-прогноза (например, каждого потенциального HMVP-прогноза, если прогноз представляет собой двунаправленное прогнозирование) в список MV для однонаправленного прогнозирования.
На фиг. 11 проиллюстрирован пример генерирования списка MV для однонаправленного прогнозирования в режиме треугольников при перемежении векторов MV для однонаправленного прогнозирования для пространственных/временных кандидатов и потенциальных HMVP-прогнозов. Как показано на фиг. 11, на этапе 1130 устройство кодирования видеосигналов может определять, включен ли MV L0 в кандидат (например, кандидат на i-е слияние). Если это так, на этапе 1132 устройство кодирования видеосигналов добавляет MV L0, связанный с кандидатом, в список MV для однонаправленного прогнозирования. На этапе 1134 устройство кодирования видеосигналов может проверять, является ли пространственно-временной кандидат последним в списке. На этапе 1136 устройство кодирования видеосигналов может определять, включен ли MV L1 в кандидат. Если это так, на этапе 1138 устройство кодирования видеосигналов может добавлять MV L1, связанный с кандидатом, в список MV для однонаправленного прогнозирования. На этапе 1140 устройство кодирования видеосигналов может проверять, является ли пространственно-временной кандидат последним в списке. На этапе 1142 устройство кодирования видеосигналов может определять, включен ли MV L0 в кандидат. Если это так, на этапе 1144 устройство кодирования видеосигналов может добавлять MV L1, связанный с кандидатом, в список MV для однонаправленного прогнозирования. На этапе 1146 устройство кодирования видеосигналов может проверять, является ли потенциальный HMVP-прогноз последним в списке. На этапе 1148 устройство кодирования видеосигналов может определять, включен ли MV L1 в кандидат. Если это так, на этапе 1150 устройство кодирования видеосигналов может добавлять MV L1, связанный с кандидатом, в список MV для однонаправленного прогнозирования. На этапе 1152 устройство кодирования видеосигналов может проверять, является ли потенциальный HMVP-прогноз последним в списке. На этапе 1154 устройство кодирования видеосигналов может определять, включены ли векторы MV L0 и L1 в кандидат. Если это так, на этапе 1156 устройство кодирования видеосигналов может добавлять среднее по векторам MV L0 и L1, связанным с кандидатом, в список MV для однонаправленного прогнозирования. На этапе 1158 устройство кодирования видеосигналов может проверять, является ли пространственно-временной кандидат последним в списке. На этапе 1160 устройство кодирования видеосигналов может определять, включены ли векторы MV L0 и L1 в кандидат. Если это так, на этапе 1162 устройство кодирования видеосигналов может добавлять среднее по векторам MV L0 и L1, связанным с кандидатом, в список MV для однонаправленного прогнозирования. На этапе 1164 устройство кодирования видеосигналов может проверять, является ли потенциальный HMVP-прогноз последним в списке.
На фиг. 12A представлена схема, иллюстрирующая пример системы 100 связи, в которой могут быть реализованы один или более описанных вариантов осуществления. Например, один или более признаков, связанных с устройством кодирования видеосигналов, как описано в настоящем документе, могут быть включены в один или более WTRU 102a, 102b, 102c и 102d системы 100 связи. Система 100 связи может представлять собой систему множественного доступа, от которой множество пользователей беспроводной связи получают содержимое, такое как голосовая информация, данные, видео, обмен сообщениями, широковещание и т.п. Система 100 связи может быть выполнена с возможностью предоставления множеству пользователей беспроводной связи доступа к такому содержимому посредством совместного использования системных ресурсов, включая ширину полосы пропускания беспроводного соединения. Например, в системах 100 связи может быть использован один или более способов доступа к каналу, таких как множественный доступ с кодовым разделением каналов (CDMA), множественный доступ с временным разделением каналов (TDMA), множественный доступ с частотным разделением каналов (FDMA), множественный доступ с ортогональным частотным разделением каналов (OFDMA), FDMA с одной несущей (SC-FDMA), расширенное OFDM с безызбыточным расширенным дискретным преобразованием Фурье (DFT) с синхропакетом (ZT UW DTS-s OFDM), OFDM с синхропакетом (UW-OFDM), OFDM с фильтрацией ресурсного блока, блок фильтров с несколькими несущими (FBMC) и т.п.
Как показано на фиг. 12A, система 100 связи может включать в себя модули 102a, 102b, 102c, 102d беспроводной передачи/приема (WTRU), RAN 104/113, CN 106/115, коммутируемую телефонную сеть 108 общего пользования (PSTN), сеть Интернет 110 и другие сети 112, хотя следует понимать, что в описанных вариантах осуществления предполагается возможность применения любого количества WTRU, базовых станций, сетей и/или элементов сети. Каждый из WTRU 102a, 102b, 102c, 102d может представлять собой устройство любого типа, выполненное с возможностью функционирования и/или взаимодействия в среде беспроводной связи. Например, WTRU 102a, 102b, 102c, 102d, любой из которых может называться станцией и/или STA, могут быть выполнены с возможностью передачи и/или приема радиосигналов и могут включать в себя оборудование пользователя (UE), мобильную станцию, стационарный или мобильный абонентский модуль, абонентский модуль, пейджер, сотовый телефон, карманный персональный компьютер (PDA), смартфон, ноутбук, нетбук, персональный компьютер, беспроводной датчик, точку доступа или устройство Mi-Fi, устройство Интернета физических объектов (IoT), часы или другие носимые устройства, наголовный дисплей (HMD), транспортное средство, беспилотный радиоуправляемый летательный аппарат, медицинское устройство и приложения (например, применяемые в дистанционной хирургии), промышленное устройство и приложения (например, робот и/или другие беспроводные устройства, работающие в условиях промышленной и/или автоматизированной технологической цепочки), устройство, относящееся к бытовой электронике, устройство, работающее в коммерческой и/или промышленной беспроводной сети, и т.п. Любой из WTRU 102a, 102b, 102c и 102d можно взаимозаменяемо называть UE.
Системы 100 связи могут также включать в себя базовую станцию 114a и/или базовую станцию 114b. Каждая из базовых станций 114a, 114b может представлять собой устройство любого типа, выполненное с возможностью беспроводного взаимодействия с по меньшей мере одним из WTRU 102a, 102b, 102c, 102d для облегчения доступа к одной или более сетям связи, таким как CN 106/115, сеть Интернет 110 и/или другие сети 112. В качестве примера базовые станции 114a, 114b могут представлять собой базовые приемопередающие станции (BTS), станции Node-B, станции eNode B, станции Home Node B, станции Home eNode B, базовую станцию следующего поколения (gNB), NodeB на основании NR, контроллер пункта связи, точку доступа (AP), беспроводной маршрутизатор и т.п. Хотя каждая из базовых станций 114a, 114b показана как отдельный элемент, следует понимать, что базовые станции 114a, 114b могут включать в себя любое количество взаимно соединенных базовых станций и/или сетевых элементов.
Базовая станция 114a может быть частью RAN 104/113, которая может также включать в себя другие базовые станции и/или элементы сети (не показаны), такие как контроллер базовой станции (BSC), контроллер радиосети (RNC), ретрансляционные узлы и т.п. Базовая станция 114a и/или базовая станция 114b могут быть выполнены с возможностью передачи и/или приема радиосигналов на одной или более несущих частотах, которые могут называться сотой (не показана). Эти частоты могут относиться к лицензированному спектру, нелицензированному спектру или к сочетанию лицензированного и нелицензированного спектров. Сота может обеспечивать покрытие для беспроводного сервиса в конкретной географической зоне, которая может быть относительно фиксированной или которая может изменяться со временем. Сота может быть дополнительно разделена на сектора соты. Например, сота, связанная с базовой станцией 114a, может быть разделена на три сектора. Таким образом, в одном варианте осуществления базовая станция 114a может включать в себя три приемопередатчика, т.е. по одному для каждого сектора соты. В варианте осуществления в базовой станции 114a может быть использована технология «множественный вход — множественный выход» (MIMO) и может быть задействовано множество приемопередатчиков для каждого сектора соты. Например, для передачи и/или приема сигналов в требуемых пространственных направлениях можно использовать формирование лучей.
Базовые станции 114a, 114b могут обмениваться данными с одним или более из WTRU 102a, 102b, 102c, 102d посредством радиоинтерфейса 116, который может представлять собой любую подходящую систему беспроводной связи (например, для передачи сигналов в радиочастотном (РЧ), микроволновом спектре, спектре сантиметровых волн, спектре микрометровых волн, инфракрасном (ИК), ультрафиолетовом (УФ) спектре, спектре видимого света и т.д.). Радиоинтерфейс 116 может быть установлен с использованием любой подходящей технологии радиодоступа (RAT).
Более конкретно, как указано выше, система 100 связи может представлять собой систему множественного доступа, и в ней можно использовать одну или более схем доступа к каналу, например CDMA, TDMA, FDMA, OFDMA, SC-FDMA и т.п. Например, в базовой станции 114a в RAN 104/113 и WTRU 102a, 102b, 102c может быть реализована технология радиосвязи, такая как универсальный наземный доступ (UTRA) для универсальной системы мобильной связи (UMTS), в которой может быть установлен радиоинтерфейс 115/116/117 с использованием широкополосного CDMA (WCDMA). WCDMA может включать в себя протоколы связи, такие как высокоскоростной пакетный доступ (HSPA) и/или усовершенствованный HSPA (HSPA+). Протокол HSPA может включать в себя высокоскоростной пакетный доступ по нисходящей (DL) линии связи (HSDPA) и/или высокоскоростной пакетный доступ по восходящей (UL) линии связи (HSUPA).
В варианте осуществления в базовой станции 114a и WTRU 102a, 102b, 102c может быть реализована такая технология радиосвязи, как усовершенствованная сеть наземного радиодоступа UMTS (E-UTRA), которая может устанавливать радиоинтерфейс 116 с использованием стандарта долгосрочного развития сетей связи (LTE), и/или LTE-Advanced (LTE-A), и/или LTE-Advanced Pro (LTE-A Pro).
В варианте осуществления базовая станция 114a и WTRU 102a, 102b, 102c могут реализовывать такую технологию радиосвязи, как новая технология радиодоступа (NR Radio Access), которая может устанавливать радиоинтерфейс 116 с использованием технологии New Radio (NR).
В варианте осуществления в базовой станции 114a и WTRU 102a, 102b, 102c может быть реализовано множество технологий радиодоступа. Например, в совокупности в базовой станции 114a и WTRU 102a, 102b, 102c могут быть реализованы технологии радиодоступа LTE и NR, например, с использованием принципов двойного подключения (DC). Таким образом, радиоинтерфейс, используемый WTRU 102a, 102b, 102c, может характеризоваться использованием множества типов технологий радиодоступа и/или передачами, отправляемыми на базовые станции / с базовых станций, множества типов (например, eNB и gNB).
В других вариантах осуществления в базовой станции 114a и WTRU 102a, 102b, 102c могут быть реализованы технологии радиосвязи, такие как IEEE 802.11 (т.е. WiFi), IEEE 802.16 (т.е. технология широкополосного доступа в микроволновом диапазоне (WiMAX)), CDMA2000, CDMA2000 1X, CDMA2000 EV-DO, временный стандарт 2000 (IS-2000), временный стандарт 95 (IS-95), временный стандарт 856 (IS-856), глобальная система мобильной связи (GSM), развитие стандарта GSM с увеличенной скоростью передачи данных (EDGE), GSM EDGE (GERAN) и т.п.
Базовая станция 114b, показанная на фиг. 12A, может представлять собой, например, беспроводной маршрутизатор, станцию Home Node B, станцию Home eNode B или точку доступа, и в ней может быть использована любая подходящая RAT для облегчения обеспечения беспроводной связи в локализованной зоне, такой как коммерческое предприятие, жилое помещение, транспортное средство, учебное заведение, промышленный объект, воздушный коридор (например, для использования беспилотными радиоуправляемыми летательными аппаратами), проезжая часть и т.п. В одном варианте осуществления в базовой станции 114b и WTRU 102c, 102d может быть реализована технология радиосвязи, такая как IEEE 802.11, для создания беспроводной локальной сети (WLAN). В варианте осуществления в базовой станции 114b и WTRU 102c, 102d может быть реализована технология радиосвязи, такая как IEEE 802.15, для создания беспроводной персональной сети (WPAN). В еще одном варианте осуществления в базовой станции 114b и WTRU 102c, 102d можно использовать RAT на основе сот (например, WCDMA, CDMA2000, GSM, LTE, LTE-A, LTE-A Pro, NR и т.п.) для создания пикосоты или фемтосоты. Как показано на фиг. 12A, базовая станция 114b может иметь прямое соединение с сетью Интернет 110. Таким образом, для базовой станции 114b может не требоваться доступа к сети Интернет 110 посредством CN 106/115.
RAN 104/113 может обмениваться данными с CN 106/115, которая может представлять собой сеть любого типа, выполненную с возможностью предоставления услуг передачи голосовой информации, данных, приложений и/или голосовой связи по протоколу (VoIP) сети Интернет одному или более из WTRU 102a, 102b, 102c, 102d. К данным могут предъявляться различные требования по качеству обслуживания (QoS), например различные требования по производительности, требования к задержке, требования к отказоустойчивости, требования к надежности, требования к скорости передачи данных, требования к мобильности и т.п. Сеть CN 106/115 может предоставлять управление вызовами, услуги биллинга, услуги мобильной связи на основании местоположения, предварительно оплаченные вызовы, возможность связи с сетью Интернет, распределение видеосигналов и т.п. и/или выполнять функции высокоуровневой защиты, такие как аутентификация пользователей. Хотя на фиг. 12A это не показано, следует понимать, что RAN 104/113 и/или CN 106/115 могут прямо или косвенно обмениваться данными с другими RAN, в которых использована такая же RAT, что и в RAN 104/113, или другая RAT. Например, в дополнение к соединению с RAN 104/113, в которой может быть использована технология радиосвязи NR, CN 106/115 может также обмениваться данными с другой RAN (не показана), использующей технологию радиосвязи GSM, UMTS, CDMA 2000, WiMAX, E-UTRA или WiFi.
CN 106/115 может также выступать в качестве шлюза для WTRU 102a, 102b, 102c, 102d, чтобы обеспечивать доступ к сети PSTN 108, сети Интернет 110 и/или другим сетям 112. PSTN 108 может включать в себя телефонные сети с коммутацией каналов, которые предоставляют традиционные услуги телефонной связи (POTS). Интернет 110 может включать в себя глобальную систему взаимно соединенных компьютерных сетей и устройств, которые используют распространенные протоколы связи, такие как протокол управления передачей (TCP), протокол пользовательских дейтаграмм (UDP) и/или протокол Интернета (IP) в наборе протоколов Интернета TCP/IP. Сети 112 могут включать в себя проводные и/или беспроводные сети связи, которые принадлежат другим поставщикам услуг и/или управляются ими. Например, сети 112 могут включать в себя другую CN, соединенную с одной или более RAN, в которых может быть использована такая же RAT, как и в RAN 104/113, или другая RAT.
Некоторые или все из WTRU 102a, 102b, 102c, 102d в системе 100 связи могут включать в себя многорежимные возможности (например, WTRU 102a, 102b, 102c, 102d могут включать в себя множество приемопередатчиков для связи с разными беспроводными сетями по разным беспроводным линиям связи). Например, WTRU 102c, показанный на фиг. 12A, может быть выполнен с возможностью взаимодействия с базовой станцией 114a, в которой может быть использована технология радиосвязи на основе сот, а также с базовой станцией 114b, в которой может быть использована технология радиосвязи IEEE 802.
На фиг. 12B представлена схема системы, иллюстрирующая пример WTRU 102. Как показано на фиг. 12B, WTRU 102 может включать в себя, помимо прочего, процессор 118, приемопередатчик 120, передающий/приемный элемент 122, динамик/микрофон 124, клавиатуру 126, дисплей/сенсорную панель 128, несъемное запоминающее устройство 130, съемное запоминающее устройство 132, источник 134 питания, набор 136 микросхем глобальной системы определения местоположения (GPS) и/или другие периферийные устройства 138. Следует понимать, что WTRU 102 может включать в себя любую подкомбинацию вышеперечисленных элементов и при этом соответствовать варианту осуществления.
Процессор 118 может представлять собой процессор общего назначения, процессор специального назначения, традиционный процессор, цифровой сигнальный процессор (DSP), множество микропроцессоров, один или более микропроцессоров, связанных с ядром DSP, контроллер, микроконтроллер, специализированные интегральные схемы (ASIC), схемы программируемых пользователем вентильных матриц (FPGA), интегральную микросхему (IC) любого другого типа, конечный автомат и т.п. Процессор 118 может выполнять кодирование сигналов, обработку данных, управление мощностью, обработку ввода/вывода и/или иметь любые другие функциональные возможности, необходимые WTRU 102 для функционирования в среде беспроводной связи. Процессор 118 может быть соединен с приемопередатчиком 120, который может быть соединен с передающим/приемным элементом 122. Хотя на фиг. 12B процессор 118 и приемопередатчик 120 показаны в виде отдельных компонентов, следует понимать, что процессор 118 и приемопередатчик 120 могут быть выполнены как единое целое и встроены в электронный блок или микросхему.
Передающий/приемный элемент 122 может быть выполнен с возможностью передачи сигналов на базовую станцию (например, базовую станцию 114a) или приема от нее сигналов по радиоинтерфейсу 116. Например, в одном варианте осуществления передающий/приемный элемент 122 может представлять собой антенну, выполненную с возможностью передачи и/или приема РЧ-сигналов. В варианте осуществления передающий/приемный элемент 122 может представлять собой излучатель/детектор, выполненный с возможностью передачи и/или приема, например, сигналов в ИК-, УФ-спектре или спектре видимого света. В еще одном варианте осуществления передающий/приемный элемент 122 может быть выполнен с возможностью передачи и/или приема сигналов как в РЧ-спектре, так и в спектре видимого света. Следует понимать, что передающий/приемный элемент 122 может быть выполнен с возможностью передачи и/или приема любой комбинации радиосигналов.
Хотя на фиг. 12B передающий/приемный элемент 122 показан в виде единственного элемента, WTRU 102 может включать в себя любое количество передающих/приемных элементов 122. Более конкретно, в WTRU 102 может быть использована технология MIMO. Таким образом, в одном варианте осуществления WTRU 102 может включать в себя два или более передающих/приемных элементов 122 (например, множество антенн) для передачи и приема радиосигналов по радиоинтерфейсу 116.
Приемопередатчик 120 может быть выполнен с возможностью модуляции сигналов, передаваемых посредством передающего/приемного элемента 122, а также демодуляции сигналов, принятых посредством передающего/приемного элемента 122. Как указано выше, WTRU 102 может иметь многорежимные возможности. Таким образом, приемопередатчик 120 может включать в себя множество приемопередатчиков, с помощью которых WTRU 102 получает возможность взаимодействия посредством множества RAT, таких как, например, NR и IEEE 802.11.
Процессор 118 WTRU 102 может быть соединен с динамиком/микрофоном 124, клавиатурой 126 и/или дисплеем/сенсорной панелью 128 (например, жидкокристаллическим дисплеем (LCD) или дисплеем на органических светодиодах (OLED)) и может принимать от них данные, вводимые пользователем. Процессор 118 может также выводить пользовательские данные на динамик/микрофон 124, клавиатуру 126 и/или дисплей/сенсорную панель 128. Кроме того, процессор 118 может иметь доступ к информации с подходящего запоминающего устройства любого типа, такого как несъемное запоминающее устройство 130 и/или съемное запоминающее устройство 132, и хранить на нем данные. Несъемное запоминающее устройство 130 может включать в себя оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ), жесткий диск или запоминающее устройство любого другого типа. Съемное запоминающее устройство 132 может включать в себя карту модуля идентификации абонента (SIM), карту памяти, защищенную цифровую карту памяти (SD) и т.п. В других вариантах осуществления процессор 118 может осуществлять доступ к информации с запоминающего устройства, которое физически размещено не в WTRU 102, а, например, на сервере или домашнем компьютере (не показан), и хранить на нем данные.
Процессор 118 может принимать питание от источника 134 питания и может быть выполнен с возможностью управления питанием и/или распределения питания на другие компоненты в WTRU 102. Источник 134 питания может представлять собой любое подходящее устройство для подачи питания на WTRU 102. Например, источник 134 питания может включать в себя одну или более сухих батарей (например, никель-кадмиевых (NiCd), никель-цинковых (NiZn), никель-металл-гидридных (NiMH), литий-ионных (Li-ion) и т.п.), солнечных элементов, топливных элементов и т.п.
Процессор 118 может также быть соединен с набором 136 микросхем GPS, который может быть выполнен с возможностью предоставления информации о местоположении (например, долготы и широты) относительно текущего местоположения WTRU 102. Дополнительно или вместо информации от набора 136 микросхем GPS модуль WTRU 102 может принимать информацию о местоположении по радиоинтерфейсу 116 от базовой станции (например, от базовых станций 114a, 114b) и/или определять свое местоположение на основании синхронизации сигналов, принимаемых от двух или более соседних базовых станций. Следует понимать, что WTRU 102 может получать информацию о местоположении посредством любого подходящего способа определения местоположения и при этом соответствовать варианту осуществления.
Процессор 118 может быть дополнительно соединен с другими периферийными устройствами 138, которые могут включать в себя один или более программных и/или аппаратных модулей, в которых предусмотрены дополнительные признаки, функциональные возможности и/или возможности по установлению проводной или беспроводной связи. Например, периферийные устройства 138 могут включать в себя акселерометр, электронный компас, спутниковый приемопередатчик, цифровую камеру (для фото- и/или видеосъемки), порт универсальной последовательной шины (USB), вибрационное устройство, телевизионный приемопередатчик, беспроводную гарнитуру, модуль Bluetooth®, радиомодуль с частотной модуляцией (FM), цифровой музыкальный проигрыватель, мультимедийный проигрыватель, модуль для воспроизведения видеоигр, Интернет-браузер, устройство виртуальной реальности и/или дополненной реальности (VR/AR), трекер активности и т.п. Периферийные устройства 138 могут включать в себя один или более датчиков, причем датчики могут представлять собой один или более из гироскопа, акселерометра, датчика Холла, магнитометра, датчика ориентации, датчика приближения, датчика температуры, датчика времени; датчика географического положения; высотомера, датчика освещенности, датчика касания, магнитометра, барометра, датчика жеста, биометрического датчика и/или датчика влажности.
WTRU 102 может включать в себя полнодуплексное радиоустройство, для которого передача и прием некоторых или всех сигналов, например, связанных с конкретными подкадрами как для UL (например, для передачи), так и для нисходящей линии связи (например, для приема), могут быть осуществлены совместно и/или одновременно. Полнодуплексное радиоустройство может включать в себя блок управления помехами для снижения уровня и/или по существу устранения собственных помех с помощью либо аппаратного обеспечения (например, дросселя), либо обработки сигнала с помощью процессора (например, отдельного процессора (не показан) или процессора 118). В варианте осуществления WRTU 102 может включать в себя полудуплексное радиоустройство для передачи и приема некоторых или всех сигналов (например, связанных с конкретными подкадрами либо для UL (например, для передачи), либо для нисходящей линии связи (например, для приема)).
На фиг. 12C представлена схема системы, иллюстрирующая RAN 104 и CN 106 в соответствии с вариантом осуществления. Как отмечено выше, RAN 104 может использовать технологию радиосвязи E-UTRA для обмена данными с WTRU 102a, 102b, 102c по радиоинтерфейсу 116. RAN 104 может также обмениваться данными с CN 106.
RAN 104 может включать в себя eNode-B 160a, 160b, 160c, хотя следует понимать, что сеть RAN 104 может включать в себя любое количество eNode-B и при этом соответствовать варианту осуществления. Каждая eNode-B 160a, 160b, 160c может включать в себя один или более приемопередатчиков для обмена данными с WTRU 102a, 102b, 102c по радиоинтерфейсу 116. В одном варианте осуществления в eNode B 160a, 160b, 160c может быть реализована технология MIMO. Таким образом, в eNode-B 160a может, например, быть использовано множество антенн для передачи радиосигналов на WTRU 102a и/или приема радиосигналов от него.
Каждая из eNode-B 160a, 160b, 160c может быть связана с конкретной сотой (не показана) и может быть выполнена с возможностью принятия решений по управлению радиоресурсами, решений по передаче обслуживания, диспетчеризации пользователей в UL и/или DL и т.п. Как показано на фиг. 12C, eNode-B 160a, 160b, 160c могут обмениваться данными друг с другом по интерфейсу X2.
CN 106, показанная на фиг. 12C, может включать в себя объект 162 управления мобильностью (MME), обслуживающий шлюз 164 (SGW) и шлюз 166 (или PGW) сети с пакетной передачей данных (PDN). Хотя каждый из вышеперечисленных элементов показан как часть CN 106, следует понимать, что любой из этих элементов может принадлежать субъекту, отличному от оператора CN, и/или может быть предоставлен им для использования.
MME 162 может быть подключен к каждой из eNode-B 162a, 162b, 162c в RAN 104 по интерфейсу S1 и может выступать в качестве узла управления. Например, MME 162 может отвечать за аутентификацию пользователей WTRU 102a, 102b, 102c, активацию/деактивацию канала, выбор конкретного обслуживающего шлюза во время начального соединения WTRU 102a, 102b, 102c и т.п. MME 162 может обеспечивать функцию плоскости управления для переключения между RAN 104 и другими RAN (не показаны), которые используют другие технологии радиосвязи, такие как GSM и/или WCDMA.
SGW 164 может быть подключен к каждой из eNode B 160a, 160b, 160c в RAN 104 по интерфейсу S1. SGW 164 может по существу направлять и пересылать пакеты пользовательских данных на WTRU 102a, 102b, 102c и от них. SGW 164 может выполнять другие функции, например, привязку плоскостей пользователя во время передачи обслуживания между базовыми станциями eNode B, инициирование пейджинга, когда данные DL будут доступными для WTRU 102a, 102b, 102c, управление и хранение контекста WTRU 102a, 102b, 102c и т.п.
SGW 164 может быть подключен к PGW 166, который может предоставлять модулю WTRU 102a, 102b, 102c доступ к сетям с коммутацией пакетов, таким как сеть Интернет 110, для облегчения обмена данными между WTRU 102a, 102b, 102c и устройствами с поддержкой IP.
CN 106 может облегчать обмен данными с другими сетями. Например, CN 106 может предоставлять модулю WTRU 102a, 102b, 102c доступ к сетям с коммутацией каналов, таким как PSTN 108, для облегчения обмена данными между WTRU 102a, 102b, 102c и традиционными устройствами связи наземной линии связи. Например, CN 106 может включать в себя IP-шлюз (например, сервер мультимедийной IP-подсистемы (IMS)), который выступает в качестве интерфейса между CN 106 и PSTN 108, либо может обмениваться данными с ним. Кроме того, CN 106 может предоставлять модулю WTRU 102a, 102b, 102c доступ к другим сетям 112, которые могут включать в себя другие проводные и/или беспроводные сети, которые принадлежат другим поставщикам услуг и/или предоставлены ими для использования
Хотя WTRU описан на фиг. 12A–12D как беспроводной терминал, предполагается, что в определенных типовых вариантах осуществления с таким терминалом можно использовать (например, временно или постоянно) проводные интерфейсы связи с сетью связи.
В типовых вариантах осуществления другая сеть 112 может представлять собой WLAN.
WLAN в режиме базового набора служб (BSS) инфраструктуры может иметь точку доступа (АР) для BSS и одну или более станций (STA), связанных с АР. АР может иметь доступ к системе распределения (DS) или интерфейс с ней или осуществлять связь по проводной/беспроводной сети другого типа, которая переносит трафик в BSS и/или вне BSS. Трафик на станции STA, исходящий извне BSS, может поступать через AP и может быть доставлен на станции STA. Трафик, исходящий из станций STA к получателям вне BSS, может быть отправлен на АР для доставки соответствующим получателям. Трафик между станциями STA в пределах BSS может быть отправлен через АР, например, если STA-источник может отправлять трафик на АР, а АР может доставлять трафик STA-получателю. Трафик между STA в пределах BSS может считаться и/или называться одноранговым трафиком. Одноранговый трафик может быть передан между (например, непосредственно между) STA-источником и STA-получателем при установлении прямой линии связи (DLS). В определенных типовых вариантах осуществления DLS может использовать DLS 802.11e или туннелированное DLS 802.11z (TDLS). WLAN с использованием независимого BSS (IBSS) режима может не иметь АР, а STA (например, все из STA) в пределах или с использованием IBSS могут осуществлять связь непосредственно друг с другом. В настоящем документе режим IBSS иногда может называться режимом «динамической» связи.
При использовании режима работы инфраструктуры 802.11ac или аналогичного режима работы AP может передавать маяк по фиксированному каналу, такому как первичный канал. Первичный канал может иметь фиксированную ширину (например, ширину полосы пропускания 20 МГц) или ширину, динамически установленную с помощью сигнализации. Первичный канал может представлять собой рабочий канал BSS и может быть использован станциями STA для установления соединения с АР. В определенных типовых вариантах осуществления может быть реализован множественный доступ с контролем несущей и предотвращением коллизий (CSMA/CA), например, в системах 802.11. STA (например, каждая STA), включая АР, могут обнаруживать первичный канал для CSMA/CA. При распознавании/обнаружении и/или определении занятости первичного канала конкретной STA конкретная STA может отключаться. Одна STA (например, только одна станция) может осуществлять передачу в любой конкретный момент времени в данном BSS.
Для осуществления связи STA с высокой пропускной способностью (HT) может быть использован канал шириной 40 МГц, например, путем объединения первичного канала 20 МГц со смежным или несмежным каналом 20 МГц с образованием канала шириной 40 МГц.
STA со сверхвысокой пропускной способностью (VHT) могут поддерживать каналы шириной 20 МГц, 40 МГц, 80 МГц и/или 160 МГц. Каналы 40 МГц и/или 80 МГц могут быть образованы путем объединения сплошных каналов 20 МГц. Канал 160 МГц может быть образован путем объединения 8 сплошных каналов 20 МГц или путем объединения двух несплошных каналов 80 МГц, которые могут называться конфигурацией 80+80. Для конфигурации 80+80 данные после кодирования канала могут проходить через анализатор сегментов, который может разделять данные на два потока. Обработку по методу обратного быстрого преобразования Фурье (IFFT) и обработку во временной области можно выполнять отдельно для каждого потока. Потоки могут быть сопоставлены с двумя каналами 80 МГц, а данные могут быть переданы посредством передающей STA. В приемнике принимающей STA вышеописанная операция для конфигурации 80+80 может быть инвертирована, а объединенные данные могут быть отправлены на устройство управления доступом к среде передачи данных (MAC).
Протоколы 802.11af и 802.11ah поддерживают режимы работы на частотах до 1 ГГц. В 802.11af и 802.11ah значения ширины полосы пропускания канала и несущие уменьшены по отношению к используемым в 802.11n и 802.11ac. Протокол 802.11af поддерживает значения ширины полосы пропускания 5 МГц, 10 МГц и 20 МГц в неиспользуемом частотном спектре телевидения (TVWS), а протокол 802.11ah поддерживает значения ширины полосы пропускания 1 МГц, 2 МГц, 4 МГц, 8 МГц и 16 МГц с использованием спектра, отличного от TVWS. Согласно типовому варианту осуществления 802.11ah может поддерживать управление с измерением / межмашинные связи, например, устройства MTC в макрозоне покрытия. Устройства MTC могут обладать определенными возможностями, например, ограниченными возможностями, включая поддержку (например, поддержку только) определенных и/или ограниченных значений ширины полосы пропускания. Устройства МТС могут включать в себя батарею, имеющую срок службы батареи, превышающий пороговое значение (например, для обеспечения очень длительного срока службы батареи).
Системы WLAN, которые могут поддерживать множество каналов и значений ширины полосы пропускания канала, такие как 802.11n, 802.11ac, 802.11af и 802.11ah, включают в себя канал, который может быть назначен в качестве первичного канала. Первичный канал может иметь ширину полосы пропускания, равную наибольшей общей рабочей ширине полосы пропускания, поддерживаемой всеми STA в BSS. Ширина полосы пропускания первичного канала может быть установлена и/или ограничена станцией STA из числа всех STA, работающих в BSS, которая поддерживает режим работы с наименьшей шириной полосы пропускания. В примере 802.11ah первичный канал может иметь ширину 1 МГц для STA (например, устройств типа MTC), которые поддерживают (например, поддерживают только) режим 1 МГц, даже если AP и другие STA в BSS поддерживают 2 МГц, 4 МГц, 8 МГц, 16 МГц и/или режимы работы с другими значениями ширины полосы пропускания канала. Параметры обнаружения несущей и/или вектора выделения сети (NAV) могут зависеть от состояния первичного канала. Если первичный канал занят, например, из-за STA (в которой поддерживается только режим работы 1 МГц), осуществляющей передачу на AP, все доступные полосы частот могут считаться занятыми, даже если большинство полос частот все еще не заняты и могут быть доступными.
В Соединенных Штатах Америки доступные полосы частот, которые могут быть использованы 802.11ah, находятся в диапазоне от 902 МГц до 928 МГц. Доступные полосы частот в Корее — от 917,5 МГц до 923,5 МГц. Доступные полосы частот в Японии - от 916,5 МГц до 927,5 МГц. Общая ширина полосы пропускания, доступная для 802.11ah, составляет от 6 МГц до 26 МГц в зависимости от кода страны.
На фиг. 12D представлена схема системы, иллюстрирующая RAN 113 и CN 115 в соответствии с вариантом осуществления. Как отмечено выше, RAN 113 может использовать технологию радиосвязи NR для обмена данными с WTRU 102a, 102b, 102c по радиоинтерфейсу 116. RAN 113 может также обмениваться данными с CN 115.
RAN 113 может включать в себя gNB 180a, 180b, 180c, хотя следует понимать, что RAN 113 может включать в себя любое количество gNB и при этом соответствовать варианту осуществления. Каждая gNB 180a, 180b, 180c может включать в себя один или более приемопередатчиков для обмена данными с WTRU 102a, 102b, 102c по радиоинтерфейсу 116. В одном варианте осуществления в gNB 180a, 180b, 180c может быть реализована технология MIMO. Например, gNB 180a, 108b могут использовать формирование лучей для передачи сигналов на gNB 180a, 180b, 180c и/или приема сигналов от них. Таким образом, gNB 180a, например, может использовать множество антенн для передачи радиосигналов на WTRU 102a и/или приема радиосигналов от него. В варианте осуществления на gNB 180a, 180b, 180c может быть реализована технология агрегирования несущих. Например, gNB 180a может передавать на WTRU 102a множество несущих составляющих (не показаны). Подмножество этих несущих составляющих может относиться к нелицензированному спектру, тогда как остальные несущие составляющие могут относиться к лицензированному спектру. В варианте осуществления на gNB 180a, 180b, 180c может быть реализована технология координированной многоточечной передачи (CoMP). Например, WTRU 102a может принимать координированные передачи от gNB 180a и gNB 180b (и/или gNB 180c).
WTRU 102a, 102b, 102c могут обмениваться данными с gNB 180a, 180b, 180c с использованием передач, связанных с масштабируемой численной величиной. Например, разнос символов OFDM и/или разнос поднесущих OFDM может различаться для разных передач, разных сот и/или разных участков спектра беспроводной передачи. WTRU 102a, 102b, 102c могут осуществлять связь с gNB 180a, 180b, 180c с использованием подкадра или временных интервалов передачи (TTI) с различной или масштабируемой длительностью (например, содержащих различное количество символов OFDM и/или имеющих постоянные различные длительности абсолютного значения времени).
gNB 180a, 180b, 180c могут быть выполнены с возможностью обмена данными с WTRU 102a, 102b, 102c в автономной конфигурации и/или в неавтономной конфигурации. В автономной конфигурации WTRU 102a, 102b, 102c могут обмениваться данными с gNB 180a, 180b, 180c без одновременного доступа к другим RAN (например, таким как eNode-B 160a, 160b, 160c). В автономной конфигурации WTRU 102a, 102b, 102c могут использовать одну или более gNB 180a, 180b, 180c в качестве якорной точки мобильности. В автономной конфигурации WTRU 102a, 102b, 102c могут обмениваться данными с gNB 180a, 180b, 180c с использованием сигналов в нелицензированной полосе. В неавтономной конфигурации WTRU 102a, 102b, 102c могут обмениваться данными/устанавливать соединение с gNB 180a, 180b, 180c и одновременно обмениваться данными/устанавливать соединение с другой RAN, такой как eNode-B 160a, 160b, 160c. Например, в WTRU 102a, 102b, 102c могут быть реализованы принципы двойного соединения (DC) для по существу одновременного обмена данными с одной или более gNB 180a, 180b, 180c и одной или более eNode-B 160a, 160b, 160c. В неавтономной конфигурации eNode-B 160a, 160b, 160c могут выступать в качестве якорной точки мобильности для WTRU 102a, 102b, 102c, а gNB 180a, 180b, 180c могут обеспечивать дополнительное покрытие и/или пропускную способность для обслуживания WTRU 102a, 102b, 102с.
Каждая из gNB 180a, 180b, 180c может быть связана с конкретной сотой (не показано) и может быть выполнена с возможностью принятия решений относительно управления радиоресурсом, решений относительно передачи обслуживания, планирования пользователей в UL и/или DL, поддержки сегментирования сети, двойного подключения, взаимодействия между NR и E-UTRA, маршрутизации данных плоскости пользователя в функциональный блок 184a, 184b плоскости пользователя (UPF), маршрутизации информации плоскости управления в функциональный блок 182a, 182b управления доступом и мобильностью (AMF) и т.п. Как показано на фиг. 12D, gNB 180a, 180b, 180c могут обмениваться данными друг с другом по интерфейсу Xn.
CN 115, показанная на фиг. 12D, может включать в себя по меньшей мере один AMF 182a, 182b, по меньшей мере один UPF 184a, 184b, по меньшей мере один функциональный блок 183a, 183b управления сеансом (SMF) и, возможно, сеть 185a, 185b передачи данных (DN). Хотя каждый из вышеперечисленных элементов показан как часть CN 115, следует понимать, что любой из этих элементов может принадлежать субъекту, отличному от оператора CN, и/или может быть предоставлен им для использования.
AMF 182a, 182b могут быть подключены к одной или более из gNB 180a, 180b, 180c в RAN 113 по интерфейсу N2 и могут выступать в качестве узла управления. Например, AMF 182a, 182b может отвечать за аутентификацию пользователей WTRU 102a, 102b, 102c, поддержку сегментирования сети (например, обработку различных сеансов PDU с различными требованиями), выбор конкретного SMF 183a, 183b, управление зоной регистрации, прекращение сигнализации NAS, управление мобильностью и т.п. Сегментирование сети может быть использовано в AMF 182a, 182b для настройки поддержки CN для WTRU 102a, 102b, 102c на основании типов сервисов, используемых WTRU 102a, 102b, 102c. Например, разные сетевые срезы могут быть созданы для разных вариантов использования, например службы, основанные на связи повышенной надежности с низкой задержкой (URLLC), службы, основанные на доступе к расширенной широкополосной сети мобильной связи (eMBB), службы для доступа к межмашинной связи (MTC) и/или т.п. AMF 162 может предоставлять функцию плоскости управления для переключения между RAN 113 и другими RAN (не показаны), которые используют другие технологии радиосвязи, такие как LTE, LTE-A, LTE-A Pro, и/или технологии доступа, отличные от 3GPP, например WiFi.
SMF 183a, 183b может быть подключен к AMF 182a, 182b в CN 115 по интерфейсу N11. SMF 183a, 183b может также быть подключен к UPF 184a, 184b в CN 115 по интерфейсу N4. SMF 183a, 183b могут выбирать UPF 184a, 184b и управлять ими, а также конфигурировать маршрутизацию трафика с помощью UPF 184a, 184b. SMF 183a, 183b может выполнять другие функции, такие как управление IP-адресом UE и его выделение, управление сеансами PDU, управление реализацией политики и QoS, предоставление уведомлений о данных нисходящей линии связи и т.п. Тип сеанса PDU может быть основан на IP, не основан на IP, основан на Ethernet и т.п.
UPF 184a, 184b могут быть подключены к одной или более gNB 180a, 180b, 180c в RAN 113 по интерфейсу N3, который может предоставлять модулю WTRU 102a, 102b, 102c доступ к сетям с коммутацией пакетов, таким как сеть Интернет 110, для облегчения обмена данными между WTRU 102a, 102b, 102c и устройствами с поддержкой протокола IP. UPF 184, 184b могут выполнять другие функции, такие как маршрутизация и передача пакетов, применение политик в плоскости пользователя, поддержка многоканальных сеансов PDU, обработка QoS в плоскости пользователя, буферизация пакетов нисходящей линии связи, привязка для поддержки мобильности и т.п.
CN 115 может облегчать обмен данными с другими сетями. Например, CN 115 может включать в себя IP-шлюз (например, сервер мультимедийной IP-подсистемы (IMS)), который выступает в качестве интерфейса между CN 115 и PSTN 108, или может обмениваться данными с ним. Кроме того, CN 115 может предоставлять модулю WTRU 102a, 102b, 102c доступ к другим сетям 112, которые могут включать в себя другие проводные и/или беспроводные сети, которые принадлежат другим поставщикам услуг и/или управляются ими. В одном варианте осуществления WTRU 102a, 102b, 102c могут быть подключены к локальной сети передачи данных (DN) 185a, 185b через UPF 184a, 184b по интерфейсу N3 к UPF 184a, 184b и интерфейсу N6 между UPF 184a, 184b и DN 185a, 185b.
С учетом фиг. 12A–12D и соответствующих описаний фиг. 12A–12D одна или более или все из функций, описанных в настоящем документе в связи с одним или более из: WTRU 102a–d, базовых станций 114а–b, eNode-B 160a–c, MME 162, SGW 164, PGW 166, gNB 180a–c, AMF 182a–b, UPF 184a–b, SMF 183a–b, DN 185a–b и/или любого (-ых) другого (-их) устройства (устройств), описанного (-ых) в настоящем документе, могут быть реализованы одним или более устройствами эмуляции (не показаны). Устройства эмуляции могут представлять собой одно или более устройств, выполненных с возможностью эмуляции одной или более или всех функций, описанных в настоящем документе. Например, устройства эмуляции можно применять для испытания других устройств и/или для моделирования функций сети и/или WTRU.
Устройства эмуляции могут быть выполнены с возможностью реализации одного или более испытаний других устройств в лабораторной среде и/или в сетевой среде оператора. Например, одно или более устройств эмуляции могут выполнять одну или более функций или все функции, при этом они полностью или частично реализованы и/или развернуты в качестве части проводной и/или беспроводной сети связи, для испытания других устройств в сети связи. Одно или более устройств эмуляции могут выполнять одну или более функций или все функции, при этом они временно реализованы/развернуты в качестве части проводной и/или беспроводной сети связи. Устройство эмуляции может быть непосредственно соединено с другим устройством для испытания и/или выполнения испытания с использованием беспроводной связи посредством канала беспроводной связи.
Одно или более устройств эмуляции могут выполнять одну или более функций, включая все функции, и при этом не быть реализованными/развернутыми в качестве части проводной и/или беспроводной сети связи. Например, устройства эмуляции можно использовать в сценарии испытания в испытательной лаборатории и/или в неразвернутой (например, испытательной) проводной и/или беспроводной сети связи для проведения испытания одного или более компонентов. Одно или более устройств эмуляции могут представлять собой испытательное оборудование. Для передачи и/или приема данных в устройствах эмуляции можно использовать прямое РЧ-соединение и/или беспроводные связи посредством РЧ-схемы (которая может, например, включать в себя одну или более антенн).
Описанные в настоящем документе процессы и/или способы могут быть реализованы в компьютерной программе, программном обеспечении и/или микропрограммном обеспечении, записанном в машиночитаемый носитель для исполнения с помощью компьютера и/или процессора. Примеры машиночитаемого носителя включают в себя, без ограничений, электронные сигналы (передаваемые посредством проводных и/или беспроводных соединений) и/или машиночитаемые носители данных. Примеры машиночитаемого носителя данных включают в себя, без ограничений, постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ), реестр, быстродействующую буферную память, полупроводниковые устройства хранения данных, магнитные носители, такие как, без ограничений, внутренние жесткие диски и съемные диски, магнитооптические носители и/или оптические носители, такие как диски CD-ROM и/или цифровые универсальные диски (DVD). Процессор в сочетании с программным обеспечением можно применять для реализации радиочастотного приемопередатчика, предназначенного для применения в WTRU, терминале, базовой станции, RNC и/или любом главном компьютере.
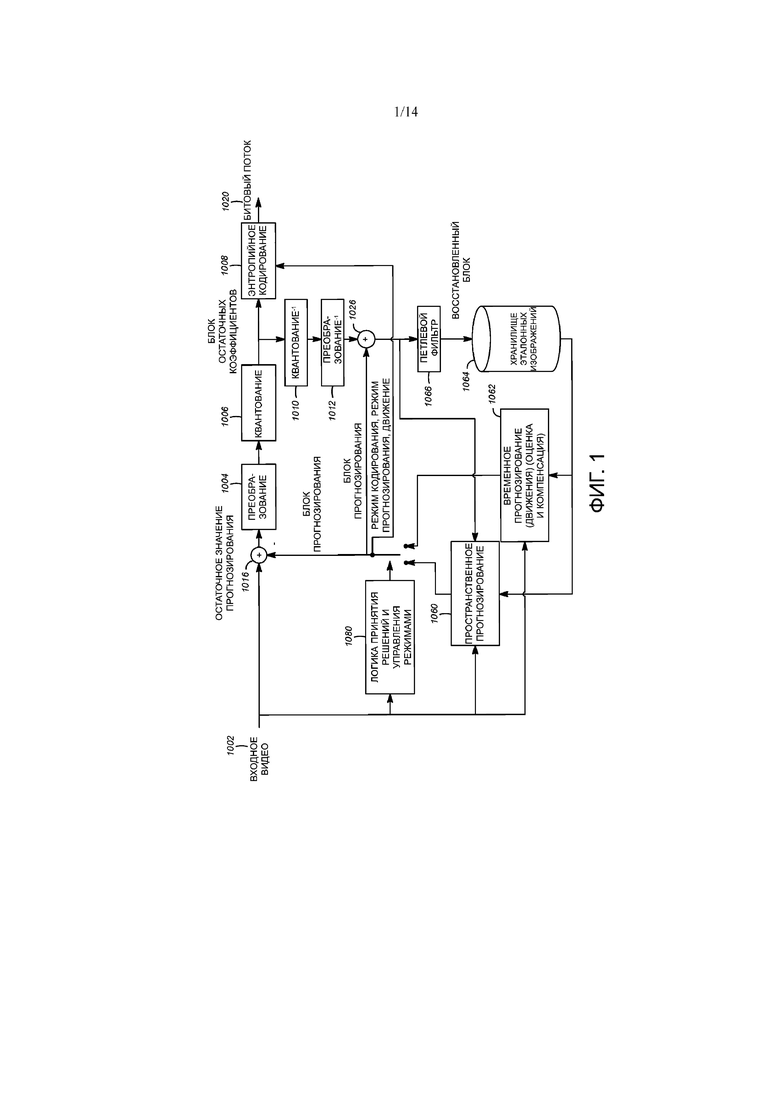
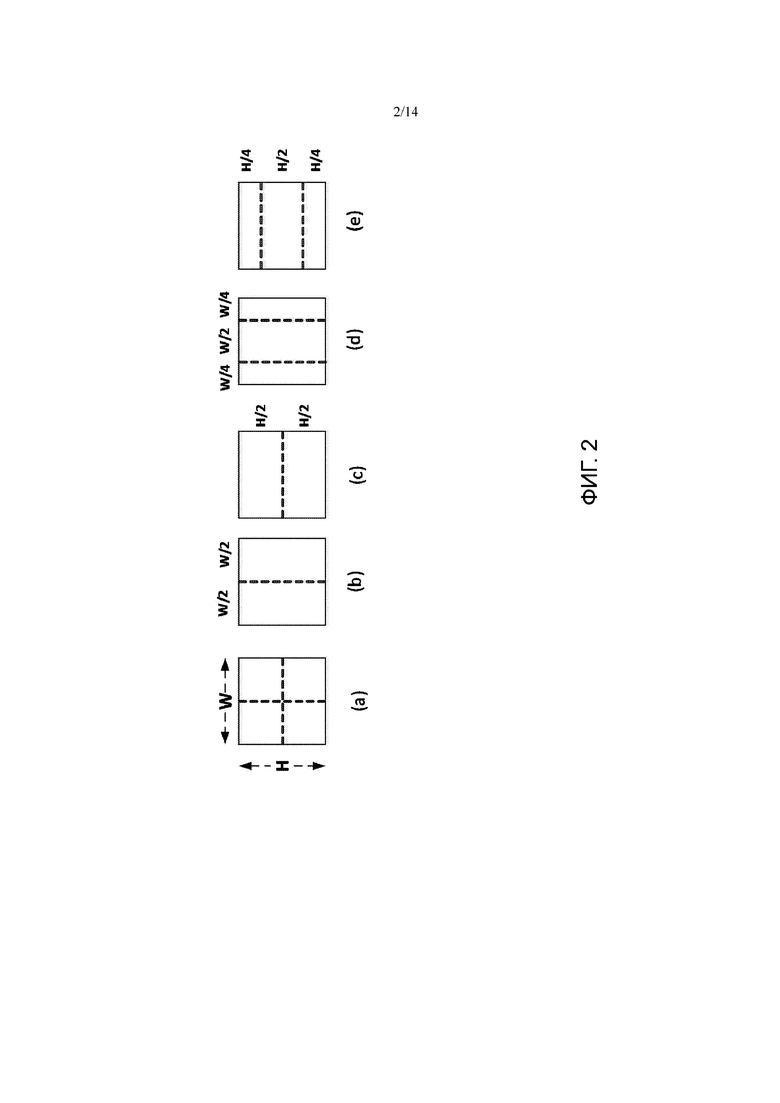







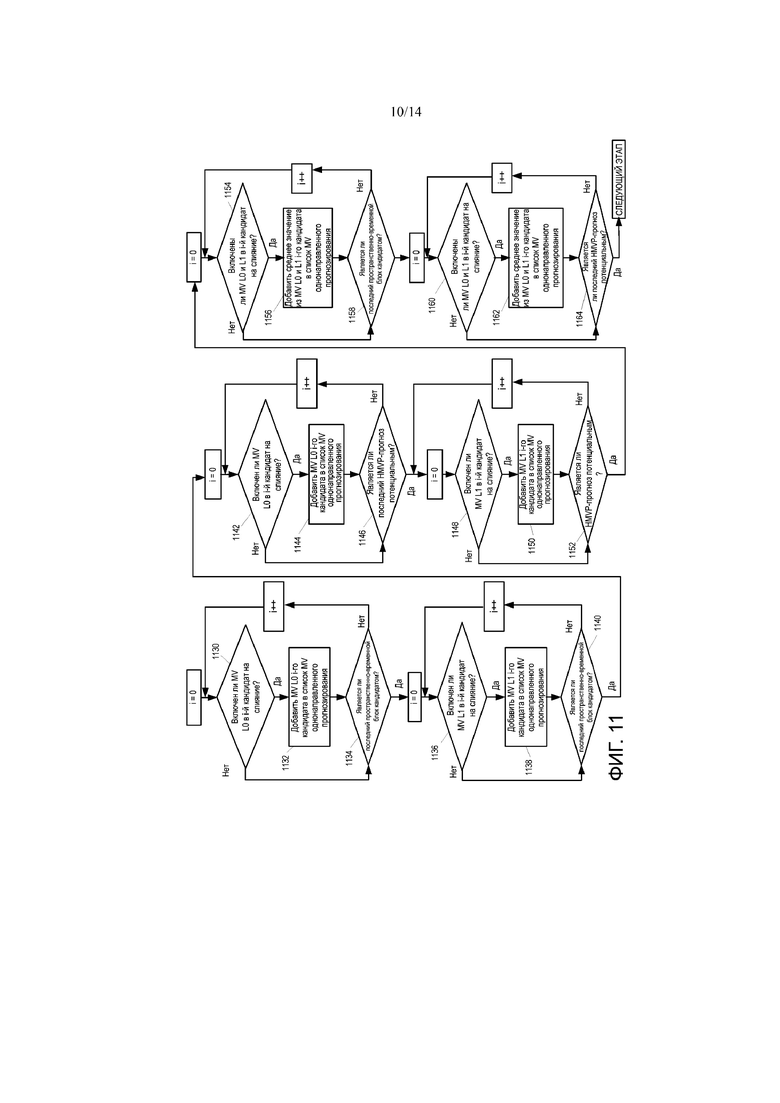



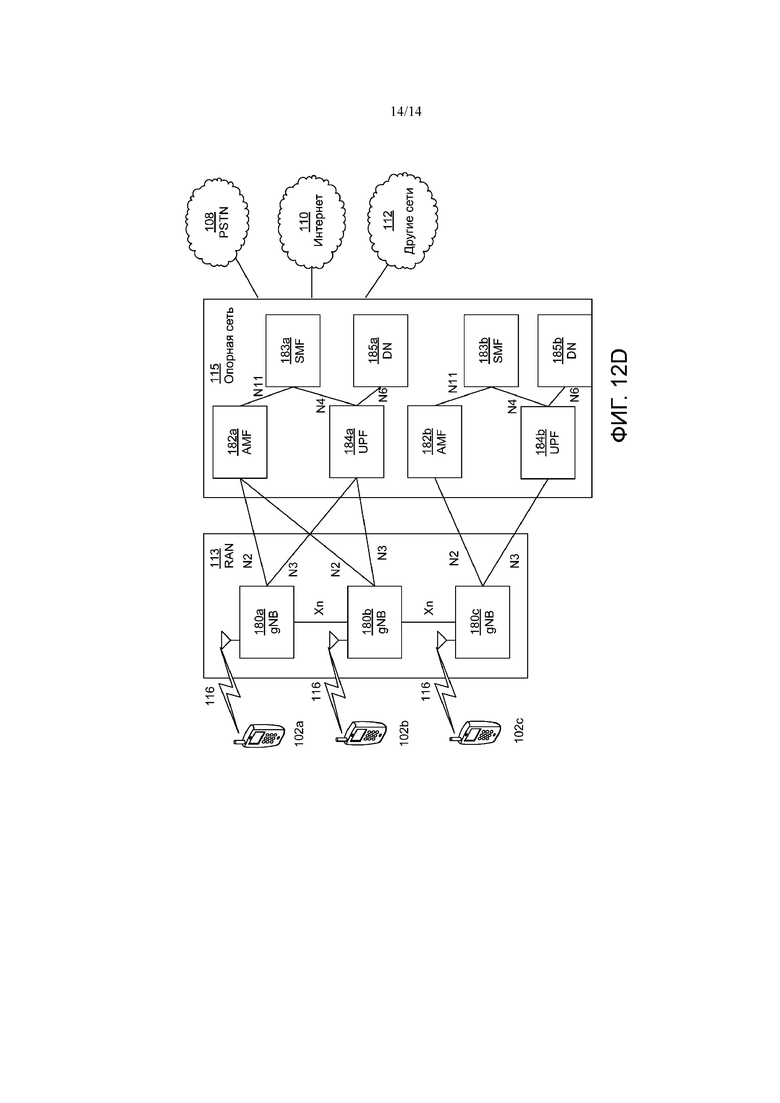
Изобретение относится к области кодирования/декодирования видео и изображений. Техническим результатом является повышение эффективности кодирования/декодирования. Предложено устройство кодирования видеосигналов, выполненное с возможностью: генерировать список прогнозов вектора движения на основании предыстории (HMVP) для текущего блока, выводить потенциальный HMVP-прогноз из ранее закодированного блока, который включает в себя информацию о движении, связанную с соседним блоком по отношению к текущему блоку, одним или более стандартными индексами и весовым индексом двунаправленного прогнозирования. Устройство кодирования видеосигналов может добавлять потенциальный HMVP-прогноз в список HMVP-прогнозов для прогнозирования вектора движения, связанного с текущим блоком, с компенсацией движения, и использует один HMVP-прогноз, выбранный из списка HMVP-прогнозов, для выполнения прогнозирования текущего блока с компенсацией движения. Прогнозирование с компенсацией движения можно выполнять с использованием информации о движении, связанной с соседним блоком по отношению к текущему блоку, одним или более стандартными индексами и весовым индексом двунаправленного прогнозирования. 5 н. и 18 з.п. ф-лы, 16 ил.
1. Устройство декодирования видео, содержащее:
процессор, выполненный с возможностью:
генерирования списка прогнозов вектора движения на основании предыстории (HMVP) для текущего блока;
выведения потенциального HMVP-прогноза из ранее закодированного блока, причем потенциальный HMVP-прогноз содержит информацию о движении, связанную с соседним блоком по отношению к текущему блоку, один или более индексов и весовой индекс двунаправленного прогнозирования потенциального HMVP-прогноза;
добавления потенциального HMVP-прогноза в список HMVP-прогнозов для прогнозирования вектора движения, связанного с текущим блоком, с компенсацией движения;
использования HMVP-прогноза, выбранного из списка HMVP-прогнозов, для выполнения прогнозирования текущего блока с компенсацией движения, при этом прогнозирование с компенсацией движения выполняют с использованием информации о движении, связанной с соседним блоком по отношению к текущему блоку, одним или более индексами и весовым индексом двунаправленного прогнозирования потенциального HMVP-прогноза, и
декодирования текущего блока с помощью HMPV-прогноза.
2. Устройство декодирования видео по п. 1, в котором процессор дополнительно выполнен с возможностью:
определения, идентичен ли потенциальный HMVP-прогноз HMVP-прогнозу в списке HMVP-прогнозов для текущего блока;
если потенциальный HMVP-прогноз идентичен любому HMVP-прогнозу из списка HMVP-прогнозов, удаления HMVP-прогноза из списка HMVP-прогнозов и добавления потенциального HMVP-прогноза в конец списка HMVP-прогнозов; и
если потенциальный HMVP-прогноз не идентичен любому HMVP-прогнозу из списка HMVP-прогнозов, удаления наиболее старой записи HMVP-прогноза из списка HMVP-прогнозов, если список HMVP-прогнозов заполнен, и добавления потенциального HMVP-прогноза в конец списка HMVP-прогнозов.
3. Устройство декодирования видео по п. 2, в котором соседний блок представляет собой пространственно несмежный блок.
4. Устройство декодирования видео по п. 2, в котором если потенциальный HMVP-прогноз идентичен HMVP-прогнозу из списка HMVP-прогнозов, после удаления HMVP-прогноза из списка HMVP-прогнозов один или более HMVP-прогнозов перемещаются вперед на одну позицию.
5. Устройство декодирования видео по п. 2, в котором потенциальный HMVP-прогноз идентичен HMVP-прогнозу в списке HMVP-прогнозов, если потенциальный HMVP-прогноз и HMVP-прогноз в списке HMVP-прогнозов имеют одинаковые векторы движения и одинаковые индексы.
6. Устройство декодирования видео по п. 2, в котором потенциальный HMVP-прогноз идентичен HMVP-прогнозу в списке HMVP-прогнозов, если потенциальный HMVP-прогноз и HMVP-прогноз в списке HMVP-прогнозов имеют одинаковые векторы движения, одинаковые индексы и один и тот же весовой индекс двунаправленного прогнозирования.
7. Устройство декодирования видео по п. 1, в котором информация о движении содержит по меньшей мере один или более векторов движения.
8. Устройство декодирования видео по п. 1, в котором весовой индекс двунаправленного прогнозирования содержит один или более весовых индексов, связанных с соседним блоком.
9. Устройство декодирования видео по п. 8, в котором к сигналу прогнозирования, генерируемому путем выполнения прогнозирования текущего блока с компенсацией движения, применяют один или более весов на основании одного или более весовых индексов.
10. Устройство декодирования видео по п. 1, в котором процессор дополнительно выполнен с возможностью сброса списка HMVP-прогнозов в начале кодирования новой строки элемента кодового дерева (CTU).
11. Устройство кодирования видео, содержащее:
процессор, выполненный с возможностью:
генерирования списка прогнозов вектора движения на основании предыстории (HMVP) для текущего блока;
выведения потенциального HMVP-прогноза из ранее закодированного блока, причем потенциальный HMVP-прогноз содержит информацию о движении, связанную с соседним блоком по отношению к текущему блоку, один или более индексов и весовой индекс двунаправленного прогнозирования HMVP-прогноза;
добавления потенциального HMVP-прогноза в список HMVP-прогнозов для прогнозирования вектора движения, связанного с текущим блоком, с компенсацией движения;
использования HMVP-прогноза, выбранного из списка HMVP-прогнозов, для выполнения прогнозирования текущего блока с компенсацией движения, при этом прогнозирование с компенсацией движения выполняют с использованием информации о движении, связанной с соседним блоком по отношению к текущему блоку, одним или более индексами и весовым индексом двунаправленного прогнозирования потенциального HMVP-прогноза, и
кодирования текущего блока с помощью HMPV-прогноза.
12. Способ декодирования видео, включающий:
генерирование списка прогнозов вектора движения на основании предыстории (HMVP) для текущего блока;
выведение потенциального HMVP-прогноза из ранее закодированного блока, причем потенциальный HMVP-прогноз содержит информацию о движении, связанную с соседним блоком по отношению к текущему блоку, один или более индексов и весовой индекс двунаправленного прогнозирования потенциального HMVP-прогноза;
добавление потенциального HMVP-прогноза в список HMVP-прогнозов для прогнозирования вектора движения, связанного с текущим блоком, с компенсацией движения;
использование HMVP-прогноза, выбранного из списка HMVP-прогнозов, для выполнения прогнозирования текущего блока с компенсацией движения, при этом прогнозирование с компенсацией движения выполняют с использованием информации о движении, связанной с соседним блоком по отношению к текущему блоку, одним или более индексами и весовым индексом двунаправленного прогнозирования потенциального HMVP-прогноза, и
декодирования текущего блока с помощью HMPV-прогноза.
13. Способ по п. 12, дополнительно включающий:
определение, идентичен ли потенциальный HMVP-прогноз HMVP-прогнозу в списке HMVP-прогнозов для текущего блока;
если потенциальный HMVP-прогноз идентичен любому HMVP-прогнозу из списка HMVP-прогнозов, удаление HMVP-прогноза из списка HMVP-прогнозов и добавление потенциального HMVP-прогноза в конец списка HMVP-прогнозов; и
если потенциальный HMVP-прогноз не идентичен любому HMVP-прогнозу из списка HMVP-прогнозов, удаление наиболее старой записи HMVP-прогноза из списка HMVP-прогнозов, если список HMVP-прогнозов заполнен, и добавление потенциального HMVP-прогноза в конец списка HMVP-прогнозов.
14. Способ по п. 12, в котором соседний блок представляет собой пространственно несмежный блок.
15. Способ по п. 13, в котором если потенциальный HMVP-прогноз идентичен HMVP-прогнозу из списка HMVP-прогнозов, после удаления HMVP-прогноза из списка HMVP-прогнозов один или более HMVP-прогнозов перемещаются вперед на одну позицию.
16. Способ по п. 13, в котором потенциальный HMVP-прогноз идентичен HMVP-прогнозу в списке HMVP-прогнозов, если потенциальный HMVP-прогноз и HMVP-прогноз в списке HMVP-прогнозов имеют одинаковые векторы движения и одинаковые индексы.
17. Способ по п. 13, в котором потенциальный HMVP-прогноз идентичен HMVP-прогнозу в списке HMVP-прогнозов, если потенциальный HMVP-прогноз и HMVP-прогноз в списке HMVP-прогнозов имеют одинаковые векторы движения, одинаковые индексы и один и тот же весовой индекс двунаправленного прогнозирования.
18. Способ по п. 12, в котором информация о движении содержит по меньшей мере один или более векторов движения.
19. Способ по п. 12, в котором весовой индекс двунаправленного прогнозирования содержит один или более весовых индексов, связанных с соседним блоком.
20. Способ по п. 19, в котором к сигналу прогнозирования, генерируемому путем выполнения прогнозирования текущего блока с компенсацией движения, применяют один или более весов на основании одного или более весовых индексов.
21. Способ по п. 12, дополнительно включающий сброс списка HMVP-прогнозов в начале кодирования новой строки элемента кодового дерева (CTU).
22. Способ кодирования видео, включающий:
генерирование списка прогнозов вектора движения на основании предыстории (HMVP) для текущего блока;
выведение потенциального HMVP-прогноза из ранее закодированного блока, причем потенциальный HMVP-прогноз содержит информацию о движении, связанную с соседним блоком по отношению к текущему блоку, один или более индексов и весовой индекс двунаправленного прогнозирования потенциального HMVP-прогноза;
добавление потенциального HMVP-прогноза в список HMVP-прогнозов для прогнозирования вектора движения, связанного с текущим блоком, с компенсацией движения;
использование HMVP-прогноза, выбранного из списка HMVP-прогнозов, для выполнения прогнозирования текущего блока с компенсацией движения, при этом прогнозирование с компенсацией движения выполняют с использованием информации о движении, связанной с соседним блоком по отношению к текущему блоку, одним или более индексами и весовым индексом двунаправленного прогнозирования потенциального HMVP-прогноза, и
кодирования текущего блока с помощью HMPV-прогноза.
23. Компьютерочитаемый носитель данных, выполненный с возможностью хранения инструкций, побуждающих один или более процессоров выполнять способ по одному из пп. 12-21.
| BENJAMIN BROSS et al., Versatile Video Coding (Draft 3), Joint Video Experts Team (JVET) of ITU-T SG 16 WP3 and ISO/IEC JTC 1/SC 29/WG 11, JVET-L1001-v7, 12th Meeting: Macao, 3-12 Oct | |||
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| LI ZHANG et al., CE4-related: History-based Motion Vector Prediction, Joint Video Experts Team (JVET) of ITU-T SG 16 WP3 and ISO/IEC JTC 1/SC 29/WG 11, | |||

