Предпосылки создания изобретения
Настоящее изобретение относится к области связи и, более конкретно, к способам, устройствам, системам, архитектурам и интерфейсам для связи в беспроводной системе связи усовершенствованного типа или следующего поколения, включая связь, осуществляемую с применением новой технологии радиосвязи и/или новой технологии радиодоступа (NR) и систем связи.
Системы кодирования видеосигналов (VC) могут применяться для сжатия цифровых видеосигналов, например, с целью снижения потребностей в хранении и/или ширины полосы пропускания таких сигналов. Системы кодирования видеосигналов могут включать в себя системы на основе блоков, на основе вейвлетов и на основе объектов, причем часто могут применять и развертывать гибридные системы кодирования видеосигналов на основе блоков. Системы кодирования видеосигналов на основе блоков включают в себя, например, международные стандарты кодирования видеосигналов, такие как стандарт сжатия движущихся видеоизображений (MPEG), например усовершенствованное кодирование видеосигналов (AVC) MPEG1/2/4 часть 2, H.264/MPEG-4 часть 10, VC-1 и высокоэффективное кодирование видеосигналов (HEVC) [4], который был разработан JCT-VC (Объединенная совместная группа по кодированию видеосигналов) при Международном союзе электросвязи – (ITU-T)/SG16/Q.6/Экспертная группа по кодированию видеосигналов (VCEG) и ISO/IEC/MPEG Сектора стандартизации по электросвязи.
Система HEVC была стандартизована, и, например, первая версия стандарта HEVC может обеспечивать сохранение скорости передачи данных (например, приблизительно 50%) и/или эквивалентное качество восприятия по сравнению со стандартом кодирования видеосигналов предыдущего поколения H.264/MPEG AVC. Хотя стандарт HEVC может обеспечивать значительные улучшения в отношении кодирования по сравнению с его предшественником, при применении дополнительных инструментов кодирования можно добиться более высокой эффективности кодирования по сравнению со стандартом HEVC. Обе рабочие группы VCEG и MPEG приступили к исследованию и разработке новых технологий кодирования для будущей стандартизации кодирования видеосигналов. Например, ITU-T VCEG и ISO/IEC MPEG позволили объединенной группе по исследованию видеосигналов (JVET) изучать усовершенствованные технологии, обеспечивающие увеличение эффективности кодирования по сравнению с HEVC. Кроме того, для будущей работы по исследованию кодирования видеосигналов создана кодовая база программного обеспечения, получившая название Объединенная исследовательская модель (JEM). Эталонное программное обеспечение JEM было основано на тестовой модели HEVC (HM), разработанной JCT-VC для HEVC. В программное обеспечение JEM, возможно, необходимо интегрировать любые дополнительные предложенные средства кодирования и протестировать их с применением общих условий тестирования JVET (CTC).
Краткое описание графических материалов
Кроме того, одинаковые номера позиций на фигурах обозначают одинаковые элементы, и при этом:
на фиг. 1A представлена схема системы, иллюстрирующая пример системы связи, в которой могут быть реализованы один или более описанных вариантов осуществления;
на фиг. 1B представлена схема системы, иллюстрирующая пример модуля беспроводной передачи/приема (WTRU), который может быть использован в системе связи, проиллюстрированной на фиг. 1A, в соответствии с вариантом осуществления;
на фиг. 1C представлена схема системы, иллюстрирующая пример сети радиодоступа (RAN) и пример опорной сети (CN), которые могут быть использованы в системе связи, проиллюстрированной на фиг. 1A, в соответствии с вариантом осуществления;
на фиг. 1D представлена схема системы, иллюстрирующая дополнительный пример RAN и дополнительный пример CN, которые могут быть использованы в системе связи, проиллюстрированной на фиг. 1A, в соответствии с вариантом осуществления;
на фиг. 2 представлена схема, иллюстрирующая гибридную систему кодирования видеосигналов на основе блоков;
на фиг. 3 представлена схема, иллюстрирующая видеодекодер на основе блоков;
на фиг. 4 представлена схема, иллюстрирующая режимы внутреннего прогнозирования;
на фиг. 5 представлена схема, иллюстрирующая эталонные семплы, применяемые для получения семплов прогнозирования;
на фиг. 6 представлена схема, иллюстрирующая внутрипланарное прогнозирование;
на фиг. 7 представлена схема, иллюстрирующая положения соседних пространственных кандидатов;
на фиг. 8 представлена схема, иллюстрирующая блоки;
на фиг. 9 представлена схема, иллюстрирующая блок CU в соответствии с вариантами осуществления;
на фиг. 10 представлена схема, иллюстрирующая определение нижней и правой опорных линий в соответствии с вариантами осуществления;
на фиг. 11 представлена схема, иллюстрирующая схему на основе CU в соответствии с вариантами осуществления;
на фиг. 12 представлена схема, иллюстрирующая CU, имеющий четыре подблока, в соответствии с вариантами осуществления;
на фиг. 13 представлена схема, иллюстрирующая опорные линии подблока в соответствии с вариантами осуществления;
на фиг. 14 представлена схема, иллюстрирующая опорные линии подблока в соответствии с вариантами осуществления;
на фиг. 15 представлена схема, иллюстрирующая опорные линии подблока в соответствии с вариантами осуществления;
на фиг. 16 представлена схема, иллюстрирующая блок-схему сигнализации флага планарного режима объединения в соответствии с вариантами осуществления;
на фиг. 17 представлена схема, иллюстрирующая блок-схему сигнализации для схемы на основе CU в соответствии с вариантами осуществления;
на фиг. 18 представлена схема, иллюстрирующая блок-схему сигнализации для адаптивной схемы в соответствии с вариантами осуществления;
на фиг. 19 представлена схема, иллюстрирующая блок-схему сигнализации для адаптивной схемы в соответствии с вариантами осуществления; и
на фиг. 20 и 21 представлены схемы, иллюстрирующие внутреннее угловое прогнозирование в соответствии с вариантами осуществления.
Примеры сетей в соответствии с вариантами осуществления
На фиг. 1A представлена схема, иллюстрирующая пример системы 100 связи, в которой могут быть реализованы один или более описанных вариантов осуществления. Система 100 связи может представлять собой систему множественного доступа, от которой множество пользователей беспроводной связи получают содержимое, такое как голосовая информация, данные, видео, обмен сообщениями, широковещание и т.п. Система 100 связи может быть выполнена с возможностью предоставления множеству пользователей беспроводной связи доступа к такому содержимому посредством совместного использования системных ресурсов, включая ширину полосы пропускания беспроводного соединения. Например, в системах 100 связи может быть использован один или более способов доступа к каналу, таких как множественный доступ с кодовым разделением каналов (CDMA), множественный доступ с временным разделением каналов (TDMA), множественный доступ с частотным разделением каналов (FDMA), множественный доступ с ортогональным частотным разделением каналов (OFDMA), FDMA с одной несущей (SC-FDMA), расширенное OFDM с безызбыточным расширенным дискретным преобразованием Фурье (DFT) с синхропакетом (ZT UW DTS-s OFDM), OFDM с синхропакетом (UW-OFDM), OFDM с фильтрацией ресурсного блока, блок фильтров с несколькими несущими (FBMC) и т.п.
Как показано на фиг. 1A, система 100 связи может включать в себя модули 102a, 102b, 102c, 102d беспроводной передачи/приема (WTRU), RAN 104/113, CN 106/115, коммутируемую телефонную сеть 108 общего пользования (PSTN), сеть Интернет 110 и другие сети 112, хотя следует понимать, что в описанных вариантах осуществления предполагается возможность применения любого количества WTRU, базовых станций, сетей и/или элементов сети. Каждый из WTRU 102a, 102b, 102c, 102d может представлять собой устройство любого типа, выполненное с возможностью функционирования и/или взаимодействия в среде беспроводной связи. Например, WTRU 102a, 102b, 102c, 102d, любой из которых может называться станцией и/или STA, могут быть выполнены с возможностью передачи и/или приема радиосигналов и могут включать в себя оборудование пользователя (UE), мобильную станцию, стационарный или мобильный абонентский модуль, абонентский модуль, пейджер, сотовый телефон, карманный персональный компьютер (PDA), смартфон, ноутбук, нетбук, персональный компьютер, беспроводной датчик, точку доступа или устройство Mi-Fi, устройство Интернета физических объектов (IoT), часы или другие носимые устройства, наголовный дисплей (HMD), транспортное средство, беспилотный радиоуправляемый летательный аппарат, медицинское устройство и приложения (например, применяемые в дистанционной хирургии), промышленное устройство и приложения (например, робот и/или другие беспроводные устройства, работающие в условиях промышленной и/или автоматизированной технологической цепочки), устройство, относящееся к бытовой электронике, устройство, работающее в коммерческой и/или промышленной беспроводной сети, и т.п. Любой из WTRU 102a, 102b, 102c и 102d можно взаимозаменяемо называть UE.
Системы 100 связи могут также включать в себя базовую станцию 114a и/или базовую станцию 114b. Каждая из базовых станций 114a, 114b может представлять собой устройство любого типа, выполненное с возможностью беспроводного взаимодействия с по меньшей мере одним из WTRU 102a, 102b, 102c, 102d для облегчения доступа к одной или более сетям связи, таким как CN 106/115, сеть Интернет 110 и/или другие сети 112. В качестве примера базовые станции 114a, 114b могут представлять собой базовые приемопередающие станции (BTS), станции Node-B, станции eNode B, станции Home Node B, станции Home eNode B, базовую станцию следующего поколения (gNB), NodeB на основании NR, контроллер пункта связи, точку доступа (AP), беспроводной маршрутизатор и т.п. Хотя каждая из базовых станций 114a, 114b показана как отдельный элемент, следует понимать, что базовые станции 114a, 114b могут включать в себя любое количество взаимно соединенных базовых станций и/или сетевых элементов.
Базовая станция 114a может быть частью RAN 104/113, которая может также включать в себя другие базовые станции и/или элементы сети (не показаны), такие как контроллер базовой станции (BSC), контроллер радиосети (RNC), ретрансляционные узлы и т.п. Базовая станция 114a и/или базовая станция 114b могут быть выполнены с возможностью передачи и/или приема радиосигналов на одной или более несущих частотах, которые могут называться сотой (не показана). Эти частоты могут относиться к лицензированному спектру, нелицензированному спектру или к сочетанию лицензированного и нелицензированного спектров. Сота может обеспечивать покрытие для беспроводного сервиса в конкретной географической зоне, которая может быть относительно фиксированной или которая может изменяться со временем. Сота может быть дополнительно разделена на сектора соты. Например, сота, связанная с базовой станцией 114a, может быть разделена на три сектора. Таким образом, в одном варианте осуществления базовая станция 114a может включать в себя три приемопередатчика, т. е. по одному для каждого сектора соты. В варианте осуществления в базовой станции 114a может быть использована технология «множественный вход — множественный выход» (MIMO) и может быть задействовано множество приемопередатчиков для каждого сектора соты. Например, для передачи и/или приема сигналов в требуемых пространственных направлениях можно использовать формирование лучей.
Базовые станции 114a, 114b могут обмениваться данными с одним или более из WTRU 102a, 102b, 102c, 102d посредством радиоинтерфейса 116, который может представлять собой любую подходящую систему беспроводной связи (например, для передачи сигналов в радиочастотном (РЧ), микроволновом спектре, спектре сантиметровых волн, спектре микрометровых волн, инфракрасном (ИК), ультрафиолетовом (УФ) спектре, спектре видимого света и т.д.). Радиоинтерфейс 116 может быть установлен с использованием любой подходящей технологии радиодоступа (RAT).
Более конкретно, как указано выше, система 100 связи может представлять собой систему множественного доступа, и в ней можно использовать одну или более схем доступа к каналу, например CDMA, TDMA, FDMA, OFDMA, SC-FDMA и т.п. Например, в базовой станции 114a в RAN 104/113 и WTRU 102a, 102b, 102c может быть реализована технология радиосвязи, такая как универсальный наземный доступ (UTRA) для универсальной системы мобильной связи (UMTS), в которой может быть установлен радиоинтерфейс 115/116/117 с использованием широкополосного CDMA (WCDMA). WCDMA может включать в себя протоколы связи, такие как высокоскоростной пакетный доступ (HSPA) и/или усовершенствованный HSPA (HSPA+). Протокол HSPA может включать в себя высокоскоростной пакетный доступ по нисходящей (DL) линии связи (HSDPA) и/или высокоскоростной пакетный доступ по восходящей (UL) линии связи (HSUPA).
В варианте осуществления в базовой станции 114a и WTRU 102a, 102b, 102c может быть реализована такая технология радиосвязи, как усовершенствованная сеть наземного радиодоступа UMTS (E-UTRA), которая может устанавливать радиоинтерфейс 116 с использованием стандарта долгосрочного развития сетей связи (LTE), и/или LTE-Advanced (LTE-A), и/или LTE-Advanced Pro (LTE-A Pro).
В варианте осуществления базовая станция 114a и WTRU 102a, 102b, 102c могут реализовывать такую технологию радиосвязи, как новая технология радиодоступа (NR Radio Access), которая может устанавливать радиоинтерфейс 116 с использованием технологии New Radio (NR).
В варианте осуществления в базовой станции 114a и WTRU 102a, 102b, 102c может быть реализовано множество технологий радиодоступа. Например, в совокупности в базовой станции 114a и WTRU 102a, 102b, 102c могут быть реализованы технологии радиодоступа LTE и NR, например, с использованием принципов двойного подключения (DC). Таким образом, радиоинтерфейс, используемый WTRU 102a, 102b, 102c, может характеризоваться применением множества типов технологий радиодоступа и/или передачами, отправляемыми на базовые станции / с базовых станций, относящихся к множеству типов (например, eNB и gNB).
В других вариантах осуществления в базовой станции 114a и WTRU 102a, 102b, 102c могут быть реализованы технологии радиосвязи, такие как IEEE 802.11 (т. е. WiFi), IEEE 802.16 (т. е. технология широкополосного доступа в микроволновом диапазоне (WiMAX)), CDMA2000, CDMA2000 1X, CDMA2000 EV-DO, временный стандарт 2000 (IS-2000), временный стандарт 95 (IS-95), временный стандарт 856 (IS-856), глобальная система мобильной связи (GSM), развитие стандарта GSM с увеличенной скоростью передачи данных (EDGE), GSM EDGE (GERAN) и т.п.
Базовая станция 114b, показанная на фиг. 1A, может представлять собой, например, беспроводной маршрутизатор, станцию Home Node B, станцию Home eNode B или точку доступа, и в ней может быть применена любая подходящая RAT для облегчения обеспечения беспроводной связи в локализованной зоне, такой как коммерческое предприятие, жилое помещение, транспортное средство, учебное заведение, промышленный объект, воздушный коридор (например, для применения беспилотными радиоуправляемыми летательными аппаратами), проезжая часть и т.п. В одном варианте осуществления в базовой станции 114b и WTRU 102c, 102d может быть реализована технология радиосвязи, такая как IEEE 802.11, для создания беспроводной локальной сети (WLAN). В варианте осуществления в базовой станции 114b и WTRU 102c, 102d может быть реализована технология радиосвязи, такая как IEEE 802.15, для создания беспроводной персональной сети (WPAN). В еще одном варианте осуществления в базовой станции 114b и WTRU 102c, 102d можно использовать RAT на основе сот (например, WCDMA, CDMA2000, GSM, LTE, LTE-A, LTE-A Pro, NR и т.п.) для создания пикосоты или фемтосоты. Как показано на фиг. 1A, базовая станция 114b может иметь прямое соединение с сетью Интернет 110. Таким образом, для базовой станции 114b может не требоваться доступа к сети Интернет 110 посредством CN 106/115.
RAN 104/113 может обмениваться данными с CN 106/115, которая может представлять собой сеть любого типа, выполненную с возможностью предоставления услуг передачи голосовой информации, данных, приложений и/или голосовой связи по протоколу (VoIP) сети Интернет одному или более из WTRU 102a, 102b, 102c, 102d. К данным могут предъявляться различные требования по качеству обслуживания (QoS), например различные требования по производительности, требования к задержке, требования к отказоустойчивости, требования к надежности, требования к скорости передачи данных, требования к мобильности и т.п. Сеть CN 106/115 может предоставлять управление вызовами, услуги биллинга, услуги мобильной связи на основании местоположения, предварительно оплаченные вызовы, возможность связи с сетью Интернет, распределение видеосигналов и т.п. и/или выполнять функции высокоуровневой защиты, такие как аутентификация пользователей. Хотя на фиг. 1A это не показано, следует понимать, что RAN 104/113 и/или CN 106/115 могут прямо или косвенно обмениваться данными с другими RAN, в которых задействована такая же RAT, что и в RAN 104/113, или другая RAT. Например, в дополнение к соединению с RAN 104/113, в которой может быть использована технология радиосвязи NR, CN 106/115 может также обмениваться данными с другой RAN (не показана), использующей технологию радиосвязи GSM, UMTS, CDMA 2000, WiMAX, E-UTRA или WiFi.
CN 106/115 может также выступать в качестве шлюза для WTRU 102a, 102b, 102c, 102d, чтобы обеспечивать доступ к сети PSTN 108, сети Интернет 110 и/или другим сетям 112. PSTN 108 может включать в себя телефонные сети с коммутацией каналов, которые предоставляют традиционные услуги телефонной связи (POTS). Интернет 110 может включать в себя глобальную систему взаимно соединенных компьютерных сетей и устройств, которые используют распространенные протоколы связи, такие как протокол управления передачей (TCP), протокол пользовательских дейтаграмм (UDP) и/или протокол Интернета (IP) в наборе протоколов Интернета TCP/IP. Сети 112 могут включать в себя проводные и/или беспроводные сети связи, которые принадлежат другим поставщикам услуг и/или управляются ими. Например, сети 112 могут включать в себя другую CN, соединенную с одной или более RAN, в которых может быть использована такая же RAT, как и в RAN 104/113, или другая RAT.
Некоторые или все из WTRU 102a, 102b, 102c, 102d в системе 100 связи могут включать в себя многорежимные возможности (например, WTRU 102a, 102b, 102c, 102d могут включать в себя множество приемопередатчиков для связи с разными беспроводными сетями по разным беспроводным линиям связи). Например, WTRU 102c, показанный на фиг. 1A, может быть выполнен с возможностью обмена данными с базовой станцией 114a, которая может использовать технологию радиосвязи на основе сот, а также с базовой станцией 114b, которая может использовать технологию радиосвязи IEEE 802.
На фиг. 1B представлена схема системы, иллюстрирующая пример WTRU 102. Как показано на фиг. 1B, WTRU 102 может включать в себя, помимо прочего, процессор 118, приемопередатчик 120, передающий/приемный элемент 122, динамик/микрофон 124, клавиатуру 126, дисплей/сенсорную панель 128, несъемное запоминающее устройство 130, съемное запоминающее устройство 132, источник 134 питания, набор 136 микросхем глобальной системы определения местоположения (GPS) и/или другие периферийные устройства 138. Следует понимать, что WTRU 102 может включать в себя любую подкомбинацию вышеперечисленных элементов и при этом соответствовать варианту осуществления.
Процессор 118 может представлять собой процессор общего назначения, процессор специального назначения, традиционный процессор, цифровой сигнальный процессор (DSP), множество микропроцессоров, один или более микропроцессоров, связанных с ядром DSP, контроллер, микроконтроллер, специализированные интегральные схемы (ASIC), схемы программируемых пользователем вентильных матриц (FPGA), интегральную схему (IC) любого другого типа, конечный автомат и т.п. Процессор 118 может выполнять кодирование сигналов, обработку данных, управление мощностью, обработку ввода/вывода и/или иметь любые другие функциональные возможности, необходимые WTRU 102 для функционирования в среде беспроводной связи. Процессор 118 может быть соединен с приемопередатчиком 120, который может быть соединен с передающим/приемным элементом 122. Хотя на фиг. 1B процессор 118 и приемопередатчик 120 показаны в виде отдельных компонентов, следует понимать, что процессор 118 и приемопередатчик 120 могут быть выполнены как единое целое и встроены в электронный блок или микросхему.
Передающий/приемный элемент 122 может быть выполнен с возможностью передачи сигналов на базовую станцию (например, базовую станцию 114a) или приема от нее сигналов по радиоинтерфейсу 116. Например, в одном варианте осуществления передающий/приемный элемент 122 может представлять собой антенну, выполненную с возможностью передачи и/или приема РЧ-сигналов. В варианте осуществления передающий/приемный элемент 122 может представлять собой излучатель/детектор, выполненный с возможностью передачи и/или приема, например, сигналов в ИК-, УФ-спектре или спектре видимого света. В еще одном варианте осуществления передающий/приемный элемент 122 может быть выполнен с возможностью передачи и/или приема сигналов как в РЧ-спектре, так и в спектре видимого света. Следует понимать, что передающий/приемный элемент 122 может быть выполнен с возможностью передачи и/или приема любой комбинации радиосигналов.
Хотя на фиг. 1B передающий/приемный элемент 122 показан в виде единственного элемента, WTRU 102 может включать в себя любое количество передающих/приемных элементов 122. Более конкретно, в WTRU 102 может быть использована технология MIMO. Таким образом, в одном варианте осуществления WTRU 102 может включать в себя два или более передающих/приемных элементов 122 (например, множество антенн) для передачи и приема радиосигналов по радиоинтерфейсу 116.
Приемопередатчик 120 может быть выполнен с возможностью модуляции сигналов, передаваемых посредством передающего/приемного элемента 122, а также демодуляции сигналов, принятых посредством передающего/приемного элемента 122. Как указано выше, WTRU 102 может иметь многорежимные возможности. Таким образом, приемопередатчик 120 может включать в себя множество приемопередатчиков, с помощью которых WTRU 102 получает возможность взаимодействия посредством множества RAT, таких как, например, NR и IEEE 802.11.
Процессор 118 WTRU 102 может быть соединен с динамиком/микрофоном 124, клавиатурой 126 и/или дисплеем/сенсорной панелью 128 (например, жидкокристаллическим дисплеем (LCD) или дисплеем на органических светодиодах (OLED)) и может принимать от них данные, вводимые пользователем. Процессор 118 может также выводить пользовательские данные на динамик/микрофон 124, клавиатуру 126 и/или дисплей/сенсорную панель 128. Кроме того, процессор 118 может иметь доступ к информации с подходящего запоминающего устройства любого типа, такого как несъемное запоминающее устройство 130 и/или съемное запоминающее устройство 132, и хранить на нем данные. Несъемное запоминающее устройство 130 может включать в себя оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ), жесткий диск или запоминающее устройство любого другого типа. Съемное запоминающее устройство 132 может включать в себя карту модуля идентификации абонента (SIM), карту памяти, защищенную цифровую карту памяти (SD) и т.п. В других вариантах осуществления процессор 118 может осуществлять доступ к информации с запоминающего устройства, которое физически размещено не в WTRU 102, а, например, на сервере или домашнем компьютере (не показан), и хранить на нем данные.
Процессор 118 может принимать питание от источника 134 питания и может быть выполнен с возможностью управления питанием и/или распределения питания на другие компоненты в WTRU 102. Источник 134 питания может представлять собой любое подходящее устройство для подачи питания на WTRU 102. Например, источник 134 питания может включать в себя одну или более сухих батарей (например, никель-кадмиевых (NiCd), никель-цинковых (NiZn), никель-металл-гидридных (NiMH), литий-ионных (Li-ion) и т.п.), солнечных элементов, топливных элементов и т.п.
Процессор 118 может также быть соединен с набором 136 микросхем GPS, который может быть выполнен с возможностью предоставления информации о местоположении (например, долготы и широты) относительно текущего местоположения WTRU 102. Дополнительно или вместо информации от набора 136 микросхем GPS модуль WTRU 102 может принимать информацию о местоположении по радиоинтерфейсу 116 от базовой станции (например, от базовых станций 114a, 114b) и/или определять свое местоположение на основании синхронизации сигналов, принимаемых от двух или более соседних базовых станций. Следует понимать, что WTRU 102 может получать информацию о местоположении посредством любого подходящего способа определения местоположения и при этом соответствовать варианту осуществления.
Процессор 118 может быть дополнительно соединен с другими периферийными устройствами 138, которые могут включать в себя один или более программных и/или аппаратных модулей, в которых предусмотрены дополнительные признаки, функциональные возможности и/или возможности по установлению проводной или беспроводной связи. Например, периферийные устройства 138 могут включать в себя акселерометр, электронный компас, спутниковый приемопередатчик, цифровую камеру (для фото- и/или видеосъемки), порт универсальной последовательной шины (USB), вибрационное устройство, телевизионный приемопередатчик, беспроводную гарнитуру, модуль Bluetooth®, радиомодуль с частотной модуляцией (FM), цифровой музыкальный проигрыватель, мультимедийный проигрыватель, модуль для воспроизведения видеоигр, Интернет-браузер, устройство виртуальной реальности и/или дополненной реальности (VR/AR), трекер активности и т.п. Периферийные устройства 138 могут включать в себя один или более датчиков, причем датчики могут представлять собой один или более из гироскопа, акселерометра, датчика Холла, магнитометра, датчика ориентации, датчика приближения, датчика температуры, датчика времени; датчика географического положения; высотомера, датчика освещенности, датчика касания, магнитометра, барометра, датчика жеста, биометрического датчика и/или датчика влажности.
WTRU 102 может включать в себя полнодуплексное радиоустройство, для которого передача и прием некоторых или всех сигналов, например, связанных с конкретными подкадрами как для UL (например, для передачи), так и для нисходящей линии связи (например, для приема), могут быть осуществлены совместно и/или одновременно. Полнодуплексное радиоустройство может включать в себя блок управления помехами для снижения уровня и/или по существу устранения собственных помех с помощью либо аппаратного обеспечения (например, дросселя), либо обработки сигнала с помощью процессора (например, отдельного процессора (не показан) или процессора 118). В варианте осуществления WRTU 102 может содержать полудуплексное радиоустройство для передачи и приема некоторых или всех сигналов (например, связанных с конкретными подкадрами либо для UL (например, для передачи), либо для нисходящей линии связи (например, для приема)).
На фиг. 1C представлена схема системы, иллюстрирующая RAN 104 и CN 106 в соответствии с вариантом осуществления. Как отмечено выше, RAN 104 может использовать технологию радиосвязи E-UTRA для обмена данными с WTRU 102a, 102b, 102c по радиоинтерфейсу 116. RAN 104 может также обмениваться данными с CN 106.
RAN 104 может включать в себя eNode-B 160a, 160b, 160c, хотя следует понимать, что сеть RAN 104 может включать в себя любое количество eNode-B и при этом соответствовать варианту осуществления. Каждая eNode-B 160a, 160b, 160c может включать в себя один или более приемопередатчиков для обмена данными с WTRU 102a, 102b, 102c по радиоинтерфейсу 116. В одном варианте осуществления в eNode B 160a, 160b, 160c может быть реализована технология MIMO. Таким образом, в eNode-B 160a может, например, быть использовано множество антенн для передачи радиосигналов на WTRU 102a и/или приема радиосигналов от него.
Каждая eNode-B 160a, 160b, 160c может быть связана с конкретной сотой (не показана) и может быть выполнена с возможностью принятия решений по управлению радиоресурсами, решений по передаче обслуживания, диспетчеризации пользователей в UL и/или DL и т.п. Как показано на фиг. 1C, eNode-B 160a, 160b, 160c могут обмениваться данными друг с другом по интерфейсу X2.
CN 106, показанная на фиг. 1C, может включать в себя объект 162 управления мобильностью (MME), обслуживающий шлюз 164 (SGW) и шлюз 166 (или PGW) сети с пакетной передачей данных (PDN). Хотя каждый из вышеперечисленных элементов показан как часть CN 106, следует понимать, что любой из этих элементов может принадлежать субъекту, отличному от оператора CN, и/или может быть предоставлен им для использования.
MME 162 может быть подключен к каждой из eNode-B 160a, 160b, 160c в RAN 104 по интерфейсу S1 и может выступать в качестве узла управления. Например, MME 162 может отвечать за аутентификацию пользователей WTRU 102a, 102b, 102c, активацию/деактивацию канала, выбор конкретного обслуживающего шлюза во время начального соединения WTRU 102a, 102b, 102c и т.п. MME 162 может обеспечивать функцию плоскости управления для переключения между RAN 104 и другими RAN (не показаны), которые используют другие технологии радиосвязи, такие как GSM и/или WCDMA.
SGW 164 может быть подключен к каждой eNode B 160a, 160b, 160c в RAN 104 по интерфейсу S1. SGW 164 может по существу направлять и пересылать пакеты пользовательских данных на WTRU 102a, 102b, 102c и от них. SGW 164 может выполнять другие функции, например привязку плоскостей пользователя во время передачи обслуживания между базовыми станциями eNode B, запуск пейджинга, когда данные DL доступны для WTRU 102a, 102b, 102c, управление и хранение контекста WTRU 102a, 102b, 102c и т.п.
SGW 164 может быть подключен к PGW 166, который может предоставлять модулям WTRU 102a, 102b, 102c доступ к сетям с коммутацией пакетов, таким как сеть Интернет 110, для облегчения обмена данными между WTRU 102a, 102b, 102c и устройствами с поддержкой IP.
CN 106 может облегчать обмен данными с другими сетями. Например, CN 106 может предоставлять модулям WTRU 102a, 102b, 102c доступ к сетям с коммутацией каналов, таким как PSTN 108, для облегчения обмена данными между WTRU 102a, 102b, 102c и традиционными устройствами связи наземной линии связи. Например, CN 106 может включать в себя IP-шлюз (например, сервер мультимедийной IP-подсистемы (IMS)), который выступает в качестве интерфейса между CN 106 и PSTN 108, либо может обмениваться данными с ним. Кроме того, CN 106 может предоставлять модулям WTRU 102a, 102b, 102c доступ к другим сетям 112, которые могут включать в себя другие проводные и/или беспроводные сети, которые принадлежат другим поставщикам услуг и/или управляются ими.
Хотя WTRU описан на фиг. 1A–1D как беспроводной терминал, предполагается, что в определенных типовых вариантах осуществления с таким терминалом может быть использован (например, временно или постоянно) проводной интерфейс связи с сетью связи.
В типовых вариантах осуществления другая сеть 112 может представлять собой WLAN.
WLAN в режиме базового набора служб (BSS) инфраструктуры может иметь точку доступа (АР) для BSS и одну или более станций (STA), связанных с АР. АР может иметь доступ к системе распределения (DS) или интерфейс с ней или осуществлять связь по проводной/беспроводной сети другого типа, которая переносит трафик в BSS и/или вне BSS. Трафик на станции STA, исходящий извне BSS, может поступать через AP и может быть доставлен на станции STA. Трафик, исходящий из станций STA к получателям вне BSS, может быть отправлен на АР для доставки соответствующим получателям. Трафик между станциями STA в пределах BSS может быть отправлен через АР, например, если STA-источник может отправлять трафик на АР, а АР может доставлять трафик STA-получателю. Трафик между STA в пределах BSS может считаться и/или называться одноранговым трафиком. Одноранговый трафик может быть передан между (например, непосредственно между) STA-источником и STA-получателем при установлении прямой линии связи (DLS). В определенных типовых вариантах осуществления DLS может использовать DLS 802.11e или туннелированное DLS 802.11z (TDLS). WLAN с использованием независимого BSS (IBSS) режима может не иметь АР, а STA (например, каждая STA) в пределах или с использованием IBSS могут осуществлять связь непосредственно друг с другом. В настоящем документе режим IBSS может иногда называться режимом «динамической» связи.
При использовании режима работы инфраструктуры 802.11ac или аналогичного режима работы AP может передавать маяк по фиксированному каналу, такому как первичный канал. Первичный канал может иметь фиксированную ширину (например, ширину полосы пропускания 20 МГц) или ширину, динамически установленную с помощью сигнализации. Первичный канал может представлять собой рабочий канал BSS и может быть использован станциями STA для установления соединения с АР. В определенных типовых вариантах осуществления может быть реализован множественный доступ с контролем несущей и предотвращением коллизий (CSMA/CA), например в системах 802.11. STA (например, каждая STA), включая АР, могут обнаруживать первичный канал для CSMA/CA. При распознавании/обнаружении и/или определении занятости первичного канала конкретной STA эта конкретная STA может отключаться. Одна STA (например, только одна станция) может осуществлять передачу в любой конкретный момент времени в данном BSS.
Для осуществления связи STA с высокой пропускной способностью (HT) может быть использован канал шириной 40 МГц, например путем объединения первичного канала 20 МГц со смежным или несмежным каналом 20 МГц с образованием канала шириной 40 МГц.
STA со сверхвысокой пропускной способностью (VHT) могут поддерживать каналы шириной 20 МГц, 40 МГц, 80 МГц и/или 160 МГц. Каналы 40 МГц и/или 80 МГц могут быть образованы путем объединения сплошных каналов 20 МГц. Канал 160 МГц может быть образован путем объединения 8 сплошных каналов 20 МГц или путем объединения двух несплошных каналов 80 МГц, которые могут называться конфигурацией 80+80. Для конфигурации 80+80 данные после кодирования канала могут проходить через анализатор сегментов, который может разделять данные на два потока. Обработку по методу обратного быстрого преобразования Фурье (IFFT) и обработку во временной области можно выполнять отдельно для каждого потока. Потоки могут быть сопоставлены с двумя каналами 80 МГц, а данные могут быть переданы посредством передающей STA. В приемнике принимающей STA вышеописанная операция для конфигурации 80+80 может быть инвертирована, а объединенные данные могут быть отправлены на устройство управления доступом к среде передачи данных (MAC).
Протоколы 802.11af и 802.11ah поддерживают режимы работы на частотах до 1 ГГц. В 802.11af и 802.11ah значения ширины полосы пропускания канала и несущие уменьшены по отношению к используемым в 802.11n и 802.11ac. Протокол 802.11af поддерживает значения ширины полосы пропускания 5 МГц, 10 МГц и 20 МГц в неиспользуемом частотном спектре телевидения (TVWS), а протокол 802.11ah поддерживает значения ширины полосы пропускания 1 МГц, 2 МГц, 4 МГц, 8 МГц и 16 МГц с использованием спектра, отличного от TVWS. Согласно типовому варианту осуществления 802.11ah может поддерживать управление с измерением / межмашинные связи, например устройства MTC в макрозоне покрытия. Устройства MTC могут обладать определенными возможностями, например ограниченными возможностями, включая поддержку (например, поддержку только) определенных и/или ограниченных значений ширины полосы пропускания. Устройства МТС могут включать в себя батарею, имеющую срок службы батареи, превышающий пороговое значение (например, для обеспечения очень длительного срока службы батареи).
Системы WLAN, которые могут поддерживать множество каналов и значений ширины полосы пропускания канала, такие как 802.11n, 802.11ac, 802.11af и 802.11ah, включают в себя канал, который может быть назначен в качестве первичного канала. Первичный канал может иметь ширину полосы пропускания, равную наибольшей общей рабочей ширине полосы пропускания, поддерживаемой всеми STA в BSS. Ширина полосы пропускания первичного канала может быть установлена и/или ограничена STA из числа всех STA, работающих в BSS, которая поддерживает режим работы с наименьшей шириной полосы пропускания. В примере 802.11ah первичный канал может иметь ширину 1 МГц для STA (например, устройств типа MTC), которые поддерживают (например, поддерживают только) режим 1 МГц, даже если AP и другие STA в BSS поддерживают 2 МГц, 4 МГц, 8 МГц, 16 МГц и/или режимы работы с другими значениями ширины полосы пропускания канала. Параметры обнаружения несущей и/или вектора выделения сети (NAV) могут зависеть от состояния первичного канала. Если первичный канал занят, например, из-за STA (в которой поддерживается только режим работы 1 МГц), осуществляющей передачу на AP, все доступные полосы частот могут считаться занятыми, даже если большинство полос частот все еще не заняты и могут быть доступными.
В Соединенных Штатах Америки доступные полосы частот, которые могут быть использованы 802.11ah, находятся в диапазоне от 902 МГц до 928 МГц. Доступные полосы частот в Корее — от 917,5 МГц до 923,5 МГц. Доступные полосы частот в Японии — от 916,5 МГц до 927,5 МГц. Общая ширина полосы пропускания, доступная для 802.11ah, составляет от 6 МГц до 26 МГц в зависимости от кода страны.
На фиг. 1D представлена схема системы, иллюстрирующая RAN 113 и CN 115 в соответствии с вариантом осуществления. Как отмечено выше, RAN 113 может задействовать технологию радиосвязи NR для обмена данными с WTRU 102a, 102b, 102c по радиоинтерфейсу 116. RAN 113 может также обмениваться данными с CN 115.
RAN 113 может включать в себя gNB 180a, 180b, 180c, хотя следует понимать, что RAN 113 может включать в себя любое количество gNB и при этом соответствовать варианту осуществления. Каждая gNB 180a, 180b, 180c может включать в себя один или более приемопередатчиков для обмена данными с WTRU 102a, 102b, 102c по радиоинтерфейсу 116. В одном варианте осуществления в gNB 180a, 180b, 180c может быть реализована технология MIMO. Например, gNB 180a, 108b могут использовать формирование лучей для передачи сигналов на gNB 180a, 180b, 180c и/или приема сигналов от них. Таким образом, gNB 180a, например, может использовать множество антенн для передачи радиосигналов на WTRU 102a и/или приема радиосигналов от него. В варианте осуществления на gNB 180a, 180b, 180c может быть реализована технология агрегирования несущих. Например, gNB 180a может передавать на WTRU 102a множество несущих составляющих (не показаны). Подмножество этих несущих составляющих может относиться к нелицензированному спектру, тогда как остальные несущие составляющие могут относиться к лицензированному спектру. В варианте осуществления на gNB 180a, 180b, 180c может быть реализована технология координированной многоточечной передачи (CoMP). Например, WTRU 102a может принимать координированные передачи от gNB 180a и gNB 180b (и/или gNB 180c).
WTRU 102a, 102b, 102c могут обмениваться данными с gNB 180a, 180b, 180c с использованием передач, связанных с масштабируемой численной величиной. Например, разнос символов OFDM и/или разнос поднесущих OFDM может различаться для разных передач, разных сот и/или разных участков спектра беспроводной передачи. WTRU 102a, 102b, 102c могут осуществлять связь с gNB 180a, 180b, 180c с использованием подкадра или временных интервалов передачи (TTI) с различной или масштабируемой длительностью (например, содержащих различное количество символов OFDM и/или имеющих постоянные различные длительности абсолютного значения времени).
gNB 180a, 180b, 180c могут быть выполнены с возможностью обмена данными с WTRU 102a, 102b, 102c в автономной конфигурации и/или в неавтономной конфигурации. В автономной конфигурации WTRU 102a, 102b, 102c могут обмениваться данными с gNB 180a, 180b, 180c без одновременного доступа к другим RAN (например, таким как eNode-B 160a, 160b, 160c). В автономной конфигурации WTRU 102a, 102b, 102c могут использовать одну или более gNB 180a, 180b, 180c в качестве якорной точки мобильности. В автономной конфигурации WTRU 102a, 102b, 102c могут обмениваться данными с gNB 180a, 180b, 180c с использованием сигналов в нелицензированной полосе. В неавтономной конфигурации WTRU 102a, 102b, 102c могут обмениваться данными / устанавливать соединение с gNB 180a, 180b, 180c и одновременно обмениваться данными / устанавливать соединение с другой RAN, такой как eNode-B 160a, 160b, 160c. Например, в WTRU 102a, 102b, 102c могут быть реализованы принципы двойного соединения (DC) для по существу одновременного обмена данными с одной или более gNB 180a, 180b, 180c и одной или более eNode-B 160a, 160b, 160c. В неавтономной конфигурации eNode-B 160a, 160b, 160c могут выступать в качестве якорной точки мобильности для WTRU 102a, 102b, 102c, а gNB 180a, 180b, 180c могут обеспечивать дополнительное покрытие и/или пропускную способность для обслуживания WTRU 102a, 102b, 102с.
Каждая из gNB 180a, 180b, 180c может быть связана с конкретной сотой (не показано) и может быть выполнена с возможностью принятия решений относительно управления радиоресурсом, решений относительно передачи обслуживания, планирования пользователей в UL и/или DL, поддержки сегментирования сети, двойного подключения, взаимодействия между NR и E-UTRA, маршрутизации данных плоскости пользователя в функциональный блок 184a, 184b плоскости пользователя (UPF), маршрутизации информации плоскости управления в функциональный блок 182a, 182b управления доступом и мобильностью (AMF) и т.п. Как показано на фиг. 1D, gNB 180a, 180b, 180c могут обмениваться данными друг с другом по интерфейсу Xn.
CN 115, показанная на фиг. 1D, может включать в себя по меньшей мере один AMF 182a, 182b, по меньшей мере один UPF 184a, 184b, по меньшей мере один функциональный блок 183a, 183b управления сеансом (SMF) и, возможно, сеть 185a, 185b передачи данных (DN). Хотя каждый из вышеперечисленных элементов показан как часть CN 115, следует понимать, что любой из этих элементов может принадлежать субъекту, отличному от оператора CN, и/или может быть предоставлен им для применения.
AMF 182a, 182b могут быть подключены к одной или более из gNB 180a, 180b, 180c в RAN 113 по интерфейсу N2 и могут выступать в качестве узла управления. Например, AMF 182a, 182b может отвечать за аутентификацию пользователей WTRU 102a, 102b, 102c, поддержку сегментирования сети (например, обработку различных сеансов PDU с различными требованиями), выбор конкретного SMF 183a, 183b, управление зоной регистрации, прекращение сигнализации NAS, управление мобильностью и т.п. Сегментирование сети может быть использовано в AMF 182a, 182b для настройки поддержки CN для WTRU 102a, 102b, 102c на основании типов сервисов, используемых модулей WTRU 102a, 102b, 102c. Например, разные сетевые срезы могут быть созданы для разных вариантов использования, например службы, основанные на связи повышенной надежности с низкой задержкой (URLLC), службы, основанные на доступе к расширенной широкополосной сети мобильной связи (eMBB), службы для доступа к межмашинной связи (MTC) и/или т.п. AMF 162 может предоставлять функцию плоскости управления для переключения между RAN 113 и другими RAN (не показаны), которые используют другие технологии радиосвязи, такие как LTE, LTE-A, LTE-A Pro, и/или технологии доступа, отличные от 3GPP, например WiFi.
SMF 183a, 183b может быть подключен к AMF 182a, 182b в CN 115 по интерфейсу N11. SMF 183a, 183b может также быть подключен к UPF 184a, 184b в CN 115 по интерфейсу N4. SMF 183a, 183b могут выбирать UPF 184a, 184b и управлять ими, а также конфигурировать маршрутизацию трафика с помощью UPF 184a, 184b. SMF 183a, 183b может выполнять другие функции, такие как управление IP-адресом UE и его выделение, управление сеансами PDU, управление реализацией политики и QoS, предоставление уведомлений о данных нисходящей линии связи и т.п. Тип сеанса PDU может быть основан на IP, не основан на IP, основан на Ethernet и т.п.
UPF 184a, 184b могут быть подключены к одной или более gNB 180a, 180b, 180c в RAN 113 по интерфейсу N3, который может предоставлять модулям WTRU 102a, 102b, 102c доступ к сетям с коммутацией пакетов, таким как сеть Интернет 110, для облегчения обмена данными между WTRU 102a, 102b, 102c и устройствами с поддержкой протокола IP. UPF 184, 184b могут выполнять другие функции, такие как маршрутизация и передача пакетов, применение политик в плоскости пользователя, поддержка многоканальных сеансов PDU, обработка QoS в плоскости пользователя, буферизация пакетов нисходящей линии связи, привязка для поддержки мобильности и т.п.
CN 115 может облегчать обмен данными с другими сетями. Например, CN 115 может включать в себя IP-шлюз (например, сервер мультимедийной IP-подсистемы (IMS)), который выступает в качестве интерфейса между CN 115 и PSTN 108, или может обмениваться данными с ним. Кроме того, CN 115 может предоставлять модулям WTRU 102a, 102b, 102c доступ к другим сетям 112, которые могут включать в себя другие проводные и/или беспроводные сети, которые принадлежат другим поставщикам услуг и/или управляются ими. В одном варианте осуществления WTRU 102a, 102b, 102c могут быть подключены к локальной сети передачи данных (DN) 185a, 185b через UPF 184a, 184b по интерфейсу N3 к UPF 184a, 184b и интерфейсу N6 между UPF 184a, 184b и DN 185a, 185b.
С учетом фиг. 1A–1D и соответствующих описаний фиг. 1A–1D одна или более или все из функций, описанных в настоящем документе в связи с одним или более из: WTRU 102a–d, базовых станций 114а–b, eNode-B 160a–c, MME 162, SGW 164, PGW 166, gNB 180a–c, AMF 182a–b, UPF 184a–b, SMF 183a–b, DN 185a–b и/или любого (-ых) другого (-их) устройства (устройств), описанного (-ых) в настоящем документе, могут быть реализованы одним или более устройствами эмуляции (не показаны). Устройства эмуляции могут представлять собой одно или более устройств, выполненных с возможностью эмуляции одной или более или всех функций, описанных в настоящем документе. Например, устройства эмуляции можно применять для испытания других устройств и/или для моделирования функций сети и/или WTRU.
Устройства эмуляции могут быть выполнены с возможностью реализации одного или более испытаний других устройств в лабораторной среде и/или в сетевой среде оператора. Например, одно или более устройств эмуляции могут выполнять одну или более функций или все функции, при этом они полностью или частично реализованы и/или развернуты в качестве части проводной и/или беспроводной сети связи, для испытания других устройств в сети связи. Одно или более устройств эмуляции могут выполнять одну или более функций или все функции, при этом они временно реализованы/развернуты в качестве части проводной и/или беспроводной сети связи. Устройство эмуляции может быть непосредственно соединено с другим устройством для испытания и/или выполнения испытания с использованием беспроводной связи посредством канала беспроводной связи.
Одно или более устройств эмуляции могут выполнять одну или более функций, включая все функции, и при этом не быть реализованными/развернутыми в качестве части проводной и/или беспроводной сети связи. Например, устройства эмуляции можно использовать в сценарии испытания в испытательной лаборатории и/или в неразвернутой (например, испытательной) проводной и/или беспроводной сети связи для проведения испытания одного или более компонентов. Одно или более устройств эмуляции могут представлять собой испытательное оборудование. Для передачи и/или приема данных в устройствах эмуляции можно использовать прямое РЧ-соединение и/или беспроводные связи посредством РЧ-схемы (которая может, например, включать в себя одну или более антенн).
Подробное описание
Универсальное кодирование видеосигналов (VVC)
Универсальное кодирование видеосигналов (VVC) представляет собой стандарт кодирования видеосигналов (например, нового, следующего поколения). Например, VVC может относиться к стандартам кодирования видеосигналов, имеющим возможности помимо HEVC. Было проведено исследование категории содержимого видеосигналов стандартного динамического диапазона для новых стандартов кодирования видеосигналов (см., например, 10-ю конференцию JVET), при которой может достигаться увеличение эффективности сжатия приблизительно на 40% по сравнению с HEVC. На основании таких результатов оценки Объединенная экспертная группа по видеосигналам (JVET) инициировала разработку стандарта кодирования видеосигналов VVC. Кроме того, для демонстрации эталонной реализации стандарта VVC была создана эталонная кодовая база программного обеспечения, получившая название «тестовая модель VVC (VTM)». В случае начального VTM-1.0 большинство модулей кодирования, включая внутреннее прогнозирование, взаимное прогнозирование, преобразование/обратное преобразование и квантование/деквантование, а также внутрипетлевые фильтры могут следовать существующей конструкции HEVC (например, они могут быть такими же, как она, сходными с ней и т.д.). Однако VVC может отличаться от HEVC тем, что в VTM может быть применена структура блочного разделения на основе одной древовидной структуры множественного типа.
На фиг. 2 представлена схема, иллюстрирующая гибридную систему кодирования видеосигналов на основе блоков.
Как показано на фиг. 2, гибридная система 200 кодирования видеосигналов на основе блоков может представлять собой универсальную гибридную структуру кодирования видеосигналов на основе блоков. В VVC может быть применена (например, в ее основе может быть) гибридная структура кодирования видеосигналов на основе блоков, например, аналогичная HEVC. Как показано на фиг. 2, входной видеосигнал 202 может обрабатываться в соответствии с блоками кодирования (CU). Другими словами, входной видеосигнал может обрабатываться поблочно, причем каждый блок может упоминаться как CU.
В случае VTM-1.0 блок CU может иметь размер до 128x128 пикселей. Кроме того, в случае VTM-1.0 блок древовидной структуры кодирования (CTU) может быть разделен на CU на основании любой из тетрарной/бинарной/тернарной древовидных структур, например, для адаптации к различным локальным характеристикам. В отличие от VTM-1.0, в случае HEVC блоки разделяются только на основе тетрарных древовидных структур. Кроме того, случай HEVC включает в себя концепцию множества типов блоков разделения, включая, например, CU, блоки прогнозирования (PU) и блоки преобразования (TU). В случае VTM-1.0 концепция множественного типа блока разделения (например, применяемая в HEVC) может не применяться (например, может быть удалена). Таким образом, в случае VTM-1.0 разделение CU, блоков прогнозирования (PU) и блоков преобразования (TU) может отсутствовать. В случае VTM-1.0 каждый CU может (например, всегда) применяться в качестве основного блока для любого действия из прогнозирования и преобразования (например, как для PU, так и для TU) без дополнительных разделений. В случае древовидной структуры множественного типа элемент (например, один) CTU может быть разделен (например, сначала разделен) с применением тетрарной древовидной структуры. Затем каждый оконечный листовой узел тетрарной древовидной структуры может быть (например, дополнительно) разделен с помощью бинарной и тернарной древовидной структуры.
Как показано на фиг. 2, может выполняться пространственное прогнозирование 260 и/или временное прогнозирование 262. Пространственное прогнозирование (например, также называемое внутренним прогнозированием) может прогнозировать текущий видеоблок с помощью пикселей из семплов уже закодированных соседних блоков (например, также называемых эталонными семплами) в одном и том же видеоизображении/срезе. Пространственное прогнозирование может снижать временную избыточность, которая может быть характерной для видеосигнала. Временное прогнозирование (например, также называемое внутренним прогнозированием или прогнозированием с компенсацией движения) может прогнозировать текущий видеоблок с помощью восстановленных пикселей из уже закодированных видеоизображений. Временное прогнозирование может снижать временную избыточность, которая может быть характерной для видеосигнала. Сигнал временного прогнозирования для данного CU может (например, обычно) инициироваться посредством одного или более векторов движения (MV). MV может указывать на любое из величины и направления движения между текущим CU и его временным опорным сигналом. В случае поддержки множества эталонных изображений может дополнительно отправляться (например, один) индекс эталонного изображения, например, для идентификации эталонного изображения в хранилище 264 эталонных изображений, из которого поступает сигнал временного прогнозирования.
Как показано на фиг. 2, решение 280 о режиме (например, размещенное/выполняемое в кодере) может выбирать (например, отбирать, определять и т.д.) наилучший режим прогнозирования. Например, после пространственного и/или временного прогнозирования выбор режима может применяться для определения наилучшего режима прогнозирования в соответствии со способом оптимизации отношения скорость передачи данных-искажение. Блок прогнозирования (например, затем) может вычитаться из текущего видеоблока 216, а остаточное значение прогнозирования может декоррелироваться посредством преобразования 204 и может квантоваться 206 для генерирования квантованных остаточных коэффициентов. Квантованные остаточные коэффициенты могут обратно квантоваться 210 и/или обратно преобразовываться 212 для формирования восстановленного остатка, который (например, затем) снова прибавляют к блоку 226 прогнозирования, например, для формирования восстановленного сигнала CU.
Внутрипетлевое средство 266 фильтрации (например, дальнейшую фильтрацию в цикле; такое как фильтр деблокирования) может применяться к восстановленному CU, например, до его помещения в хранилище 264 эталонных изображений, а отфильтрованные с помощью внутрипетлевого средства фильтрации восстановленные семплы могут применяться для кодирования будущих видеоблоков. Выходной битовый видеопоток 220 может формироваться путем отправки в блок 208 энтропийного кодирования любого из: режима кодирования (например, взаимного или внутреннего), информации о режиме прогнозирования, информации о движении и квантованных остаточных коэффициентов. Блок 208 энтропийного кодирования может (например, дополнительно) сжимать и упаковывать любой из режима кодирования (например, взаимного или внутреннего), информации о режиме прогнозирования, информации о движении и квантованных остаточных коэффициентов для формирования битового потока.
На фиг. 3 представлена схема, иллюстрирующая видеодекодер на основании блоков.
Как показано на фиг. 3, (например, общий) видеодекодер 300 на основе блоков может принимать (например, считывать, быть введенным и т.д.) битовый видеопоток 302. Битовый видеопоток 302 может быть (например, сначала) распакован и энтропийно декодирован в блоке 308 энтропийного декодирования. Информация о режиме кодирования и прогнозировании может быть предоставлена (например, отправлена) в любой из блока 360 пространственного прогнозирования (например, в случае внутреннего кодирования) или блока 362 временного прогнозирования (например, в случае взаимного кодирования), например, для формирования блока прогнозирования.
Остаточные коэффициенты преобразования могут быть предоставлены (например, отправлены) в любой из блока 310 обратного квантования и блока 312 обратного преобразования, например, для восстановления остаточного блока. Блок прогнозирования и остаточный блок могут (например, затем) складываться друг с другом в блоке (например, сумматоре) 326. восстановленный блок может (например, дополнительно) проходить через внутрипетлевое средство фильтрации перед сохранением в хранилище 364 эталонных изображений. восстановленное видео (например, которое хранится в хранилище 364 эталонных изображений) может быть предоставлено (например, отправлено, применено и т.д.) для приведения в действие устройства отображения и может применяться для прогнозирования будущих видеоблоков.
В последующих версиях VTM постепенно интегрированы новые инструменты кодирования. Например, режимы кодирования для прогнозирования цветности по яркости включены в VTM. Кроме того, также исследуются технологии прогнозирования цветности по яркости, которые дополнительно описаны ниже.
Внутреннее прогнозирование
На фиг. 4 представлена схема, иллюстрирующая режимы внутреннего прогнозирования.
Внутреннее прогнозирование в VTM может включать в себя множество угловых режимов (например, 65 угловых режимов) и может также включать в себя любой из неугловых планарных режимов и неугловых режимов DC. Как неугловые планарные режимы, так и режимы DC могут быть такими же, как в HEVC. Как показано на фиг. 4, из 65 угловых режимов 33 угловых режима такие же, как в HEVC, и угловые режимы 32 отличаются от режимов HEVC (например, как показано сплошными черными линиями со стрелками). Угловые режимы, которые могут называться направленными режимами, могут быть применены ко всем размерам блоков для внутреннего прогнозирования как яркости, так и для цветности. В случае неквадратных блоков несколько стандартных угловых режимов могут быть адаптивно заменены на широкоугольные режимы внутреннего прогнозирования. В случае применения режима DC для неквадратных блоков для вычисления среднего значения может применяться только более длинная сторона.
Внутрипланарное прогнозирование
На фиг. 5 представлена схема, иллюстрирующая эталонные семплы, применяемые для получения семплов прогнозирования.
Планарный режим может обеспечивать прогнозирование порядка «один». Планарный режим может быть предусмотрен (например, по существу) для прогнозирования порядка «один» и, например, может прогнозировать блок с помощью двухлинейной модели, полученной из верхних левых эталонных семплов (например, эталонных семплов, расположенных сверху и слева смежно с CU), например, как показано на фиг. 5. Планарный режим работы может включать в себя вычисление двух линейных прогнозирований и усреднение их, как показано далее в уравнениях 1–3:

На фиг. 6 представлена схема, иллюстрирующая внутрипланарное прогнозирование.
Операция прогнозирования согласно уравнению 1 показана в части (а) на фиг. 6. Нижнюю опорную линию получают путем воспроизведения нижнего левого семпла . Верхнюю и нижнюю опорные линии интерполируют для генерирования семплов прогнозирования
. Верхнюю и нижнюю опорные линии интерполируют для генерирования семплов прогнозирования с помощью уравнения 1. Правый опорный столбец сгенерирован путем воспроизведения верхнего правого пикселя
с помощью уравнения 1. Правый опорный столбец сгенерирован путем воспроизведения верхнего правого пикселя  , как показано в части (b) на фиг. 6. Операция прогнозирования в уравнении 2 включает в себя линейную интерполяцию левого и правого опорных столбцов для генерирования прогнозирований
, как показано в части (b) на фиг. 6. Операция прогнозирования в уравнении 2 включает в себя линейную интерполяцию левого и правого опорных столбцов для генерирования прогнозирований  . Два прогнозирования
. Два прогнозирования  и усредняются так же, как в уравнении 3, для генерирования (например, конечного) блока прогнозирования.
и усредняются так же, как в уравнении 3, для генерирования (например, конечного) блока прогнозирования.
Режим объединения в HEVC
На фиг. 7 представлена схема, иллюстрирующая положения соседних пространственных кандидатов.
В стандарте HEVC набор возможных кандидатов в режиме объединения может состоять из любого количества пространственных соседних кандидатов, (например, одного) временного соседнего кандидата и любого количества сгенерированных кандидатов. На фиг. 7 показаны положения пяти пространственных кандидатов.
Список объединенных кандидатов может быть создан путем (например, сначала) проверки пяти пространственных кандидатов и их добавления в список в порядке A1, B1, B0, A0 и B2. В случае, когда блок, находящийся в (например, одном) пространственном положении, является любым из внутрикодированного блока и находящегося за пределами границы текущего среза, блок может считаться недоступным. Любые избыточные записи, в которых кандидаты имеют такую же информацию о движении, как и существующий кандидат, могут быть (например, также) исключены из списка, например, для устранения избыточности пространственных кандидатов.
Временной кандидат может быть сгенерирован и включен в список объединяемых кандидатов. То есть после включения всех действительных пространственных кандидатов в список объединяемых кандидатов временной кандидат может быть сгенерирован из информации о движении совмещенного блока в совмещенном эталонном изображении, например, с помощью метода временного прогнозирования вектора движения (TMVP). Кроме того, в стандарте HEVC установленный размер N списка объединяемых кандидатов может составлять 5. В случае, когда количество объединяемых кандидатов (например, включая пространственные и/или временные кандидаты) больше N, в списке могут храниться только первые N–1 пространственных кандидатов и временного кандидата. В противном случае, если количество объединяемых кандидатов меньше N, в список кандидатов могут добавлять некоторые комбинированные кандидаты и нулевые кандидаты до тех пор, пока количество кандидатов не достигнет размера N.
Временное прогнозирование вектора движения на основе подблоков (SbTMVP)
VTM-3.0, который является обновлением VTM-1.0, включает в себя способ временного прогнозирования вектора движения на основе подблоков (SbTMVP). Аналогично способу TMVP, SbTMVP может применять: (1) поле движения в совмещенном изображении, например, для улучшения прогнозирования вектора движения; и (2) режим объединения для CU в текущем изображении. SbTMVP также может применять такое же совмещенное изображение, что и TMVP. Однако существуют два основных аспекта, в которых SbTMVP может отличаться от TMVP: (1) TMVP прогнозирует движение на уровне CU, а SbTMVP прогнозирует движение на уровне подблока CU (например, размер подблока CU в SbTMVP может быть зафиксирован на уровне 8×8); и (2) TMVP может получать временные векторы движения из совмещенного блока (например, нижнего правого блока или центрального блока относительно текущего CU) в совмещенном изображении. Таким образом, SbTMVP может применять сдвиг движения перед получением временной информации о движении из совмещенного изображения. В таком случае сдвиг движения может быть получен из вектора движения, принадлежащего одному из пространственных соседних блоков текущего CU.
На фиг. 8 представлена схема, иллюстрирующая блоки.
Как показано на фиг. 8, процесс SbTMVP может прогнозировать векторы движения подблока CU в текущем CU с помощью следующих двух этапов. Этап 1: исследуют пространственные соседние элементы (показанные на фиг. 7) в порядке A1, B1, B0 и A0; первый пространственный соседний блок, имеющий вектор движения, который применяет совмещенное изображение в качестве его эталонного изображения, встречается и/или идентифицируется, причем такой вектор движения выбирают в качестве применяемого сдвига движения; и сдвиг движения устанавливают равным (0, 0),если такой пространственный соседний элемент для данного CU не существует. В сценарии, показанном на левой половине фиг. 8, А1 представлен пространственный соседний блок, который обеспечивает выбранный сдвиг движения. Этап 2: применяют сдвиг движения (например, полученный на этапе 1) (например, его добавляют к координатам текущего блока) для получения информации о движении уровня подблока CU (например, включающей в себя векторы движения и эталонные индексы) из совмещенного изображения. Например, правая половина фиг. 8 иллюстрирует приложенное движение на основе предположения, что сдвиг движения установлен на движении A1. Информацию о движении каждого подблока CU получают на основании информации о движении его соответствующего блока в совмещенном изображении.
В случае идентификации информации о движении совмещенного подблока CU (например, после идентификации такой информации) информацию о движении можно преобразовывать в векторы движения и эталонные индексы текущего подблока CU. Например, информацию о движении можно преобразовывать аналогично процессу TMVP HEVC, в котором применяют временное масштабирование движения для выравнивания эталонных изображений временных векторов движения с изображениями текущего CU.
Взаимный и внутренний комбинированные режимы объединения
Взаимный и внутренний комбинированные режимы объединения объединяют внутреннее прогнозирование с индексированным прогнозированием объединения. Для объединяемого CU флаг, сигнализирующий об истинности, указывает на необходимость выбора внутреннего режима из списка внутренних кандидатов. Для компонента яркости список внутренних кандидатов может быть получен на основании четырех внутренних режимов, включая DC, планарный, горизонтальный и вертикальный режимы; а размер списка может составлять, например, три или четыре в зависимости от формы блока.
В случае, когда ширина CU больше удвоенной высоты CU, горизонтальный режим может быть исключен из списка внутреннего режима, и аналогичным образом, если высота CU больше удвоенной ширины CU, вертикальный режим может быть исключен из списка внутреннего режима. Режим внутреннего прогнозирования, выбранный индексом внутреннего режима, и индексированное прогнозирование объединения, выбранное индексом объединения (например, затем), комбинируют с помощью средневзвешенного значения. В случае выбора режима DC или планарного режима или в случае, когда ширина или высота CB меньше 4, могут быть выбраны равные весовые значения. Для компонента цветности прямой режим (DM) можно (например, всегда) применять без дополнительной сигнализации.
Во внутрипланарном режиме семплы в PU могут интерполироваться с помощью эталонных семплов вдоль границ, включая левую, правую, верхнюю и нижнюю границы, примыкающие к PU. В случае, когда правый и нижний соседние PU еще не закодированы, связанные с ними правая и нижняя опорные линии отсутствуют. Вместо этого связанные с ними правую и нижнюю опорные линии можно прогнозировать путем воспроизведения семплов в верхнем правом и нижнем левом PU соответственно, как показано в частях (A) и (b) на фиг. 6. Может возникнуть проблема, заключающаяся в том, что такие грубые приближения могут привести к неудовлетворительному прогнозированию и могут (например, таким образом) повлиять на общие характеристики сжатия.
Планарный режим объединения
В соответствии с вариантами осуществления планарный режим объединения может включать в себя признаки любого из режима внутрипланарного прогнозирования и взаимного объединения. В соответствии с вариантами осуществления могут быть обеспечены улучшенные схемы внутри планарного прогнозирования для внутренних CU во взаимных изображениях, например, для улучшения характеристик сжатия. В соответствии с вариантами осуществления улучшенные схемы внутрипланарного прогнозирования для внутренних CU во взаимных изображениях могут улучшать приближения, которые ранее представляли собой грубые приближения, которые приводят к неудовлетворительному прогнозированию и влияют на характеристики сжатия. В соответствии с вариантами осуществления информацию о движении от пространственной соседней области (например, заданного) внутреннего CU можно применять для получения правой и нижней опорных линий. В соответствии с вариантами осуществления, во взаимных изображениях эти временно полученные эталонные семплы могут сильно коррелировать с фактическими семплами и, например, могут повышать точность внутрипланарного прогнозирования.
В соответствии с вариантами осуществления любую из схемы на основе CU, схемы на основе подблоков и модифицированной внутрипланарной схемы можно применять, например, для повышения точности внутрипланарного прогнозирования во взаимных изображениях. В соответствии с вариантами осуществления схема на основе CU для получения одной или более опорных линий может включать в себя применение информации о движении от пространственных соседних элементов. В соответствии с вариантами осуществления схема на основе подблоков для получения одной или более опорных линий подблока может включать в себя применение информации о движении, полученной на основании процесса SbTMVP. В соответствии с вариантами осуществления в модифицированной внутрипланарной схеме могут применяться (например, новые) опорные линии, генерируемые схемами на основе CU и на основе подблоков для внутрипланарного прогнозирования на любом из уровня CU или уровня подблоков.
Подход на основе CU
На фиг. 9 представлена схема, иллюстрирующая блок CU в соответствии с вариантами осуществления. На фиг. 10 представлена схема, иллюстрирующая определение нижней и правой опорных линий в соответствии с вариантами осуществления.
В соответствии с вариантами осуществления в схеме на основе CU правую и нижнюю опорные линии внутреннего CU можно получать на основании информации о движении пространственных соседних элементов. Как показано на фиг. 9, CU может иметь ширину W и высоту H. В соответствии с вариантами осуществления верхнюю и левую опорные линии можно получить с помощью подхода, аналогичного подходу (например, такого же), как и во внутрипланарном режиме, как описано выше в настоящем документе. В соответствии с вариантами осуществления нижнюю и правую опорные линии, например, CU, показанного на фиг. 9, можно прогнозировать, как описано ниже в отношении выполнения (1) прогнозирования нижней опорной линии и (2) прогнозирования правой опорной линии.
В соответствии с вариантами осуществления в случае прогнозирования нижней опорной линии (например, сначала) проверяют доступность левого кандидата А1 и (например, затем) проверяют доступность нижнего левого кандидата А0. В соответствии с вариантами осуществления информацию о движении первого доступного кандидата можно выбирать и можно применять для временного прогнозирования блока размера W×(H+HB) посредством компенсации движения, причем HB может быть больше или равно единице, как проиллюстрировано в части (a) на фиг. 10. В соответствии с вариантами осуществления горизонтальная линия в ряде (H+1) может быть (например, затем) выбрана в качестве нижней опорной линии, например, в случае предположения, что ряды индексированы от верхнего ряда, начиная с индекса единицы.
В соответствии с вариантами осуществления в случае прогнозирования правой опорной линии можно (например, сначала) проверить доступность вышеуказанного пространственного кандидата В1 и (например, затем) можно проверить доступность верхнего правого кандидата В0. В соответствии с вариантами осуществления информация о движении первого доступного кандидата может быть выбрана и может применяться для временного прогнозирования блока размера (W+WR)×H посредством компенсации движения, причем WR может быть больше или равно единице, как проиллюстрировано в части (b) на фиг. 11. В соответствии с вариантами осуществления в качестве правой опорной линии может быть выбрана вертикальная линия в столбце (W+1), например, в случае предположения, что столбцы индексированы с левой стороны, начиная с индекса «один».
В соответствии с вариантами осуществления в случае, если нет доступных кандидатов A0, A1, B0 или B1, можно рассмотреть и другие пространственные и временные объединяемые кандидаты CU. В соответствии с вариантами осуществления в случае, когда доступны объединяемые кандидаты уровня CU, планарный режим объединения может быть отключен для данного CU. В соответствии с вариантами осуществления в случае, если доступен (например, только) один кандидат (например, только A1), опорная линия без кандидатов (например, правая опорная линия) может применять ту же информацию о движении, что и доступный кандидат. В соответствии с вариантами осуществления планарный режим объединения может быть отключен, если любой из вышеуказанных кандидатов и левых кандидатов недоступен. Например, в случае, когда недоступны оба А0 и А1, планарный режим объединения может быть отключен для данного CU. В соответствии с вариантами осуществления порядок проверки доступных пространственных кандидатов может быть изменен; например, кандидат А0 можно проверить до проверки кандидата А1, и/или кандидат В0 можно проверить до проверки кандидата В1.
На фиг. 11 представлена схема, иллюстрирующая схему на основе CU в соответствии с вариантами осуществления.
В соответствии с вариантами осуществления в другом подходе на основе CU опорную линию, которую получают на основании движения, может адаптивно выбирать кодер. Например, в соответствии с вариантами осуществления для определенных CU кодер может выбирать (например, может определять, может быть сконфигурирован и т.д.) для получения любой из (например, обеих) правой и нижней опорных линий с помощью описанной выше полученной схемы движения. В соответствии с вариантами осуществления для других CU кодер может применять получение движения для одной из опорных линий (например, правой опорной линии) и может применять внутрипланарный подход (например, воспроизведение доступного эталонного семпла) для получения другой опорной линии (например, нижней опорной линии), как проиллюстрировано на фиг. 11. В соответствии с вариантами осуществления в таком подходе может быть применена (например, необходима, требуется) сигнализация; описание (например, такой, дополнительной и т.д.) сигнализации может быть дополнительно приведено ниже.
В соответствии с вариантами осуществления в случае описанного выше взаимного и внутреннего комбинированного режима объединения список кандидатов внутреннего режима может быть изменен таким образом, чтобы содержать планарный режим объединения. В соответствии с вариантами осуществления планарный режим объединения может заменять первоначальный планарный режим в списке. В соответствии с вариантами осуществления в случае, когда число внутренних кандидатов меньше четырех, например, из-за размеров CU, в список может быть добавлен планарный режим объединения, например, без замены первоначального планарного режима. В соответствии с вариантами осуществления в таком случае планарный режим объединения может быть размещен после первоначального планарного режима в списке кандидатов. В соответствии с вариантами осуществления в случае, когда сигнализирован индекс планарного режима объединения, прогнозирование планарного режима объединения может быть объединено с индексированным прогнозированием объединения с помощью любого из равных и неравных весовых коэффициентов.
Подход на основе подблоков
На фиг. 12 представлена схема, иллюстрирующая CU, имеющий четыре подблока, в соответствии с вариантами осуществления.
В соответствии с вариантами осуществления в схеме на основе подблоков CU может состоять из подблоков, и планарное прогнозирование может выполняться для каждого подблока. В соответствии с вариантами осуществления планарное прогнозирование для каждого подблока может выполняться посредством (например, сперва) определения связанных с ним правой и нижней опорных линий. Как показано на фиг. 12, CU может иметь (например, включать, состоять из и т.д.) четыре подблока, обозначенные как ‘A’, ‘B’, ‘C’ и ‘D’, каждый из которых имеет размер WS×HS. В соответствии с вариантами осуществления установленный размер подблока может составлять 8×8, что совпадает с размером подблока CU в VTM. В соответствии с вариантами осуществления для каждого подблока информацию о движении можно определять с помощью процесса SbTMVP, описанного выше.
На фиг. 13 представлена схема, иллюстрирующая опорные линии подблока в соответствии с вариантами осуществления.
В соответствии с вариантами осуществления для подблока ‘A’, как показано на фиг. 13, информацию о движении подблока, полученную из SbTMVP, можно применять для прогнозирования блока размера (WS+WR) ×(HS+HB) с применением компенсации движения. В соответствии с вариантами осуществления правая и нижняя опорные линии могут быть (например, затем) получены путем выбора столбца (WS+1) и ряда (HS+1) из прогнозируемого блока соответственно, например, как показано на фиг. 13. В соответствии с вариантами осуществления размеры WR и HB могут быть больше или равны единице.
На фиг. 14 представлена схема, иллюстрирующая опорные линии подблока в соответствии с вариантами осуществления.
В соответствии с вариантами осуществления для подблока ‘B’ связанные с ним правая и нижняя опорные линии могут быть получены в соответствии с процессом, аналогичным процессу, описанному выше со ссылкой на подблок 'A’. Например, как показано в части (a) на фиг. 14, ту же левую опорную линию, которая применяется ‘A’, можно применять для подблока 'B’, однако такая опорная линия может находиться далеко (например, дальше) от ‘B’. В соответствии с вариантами осуществления левая опорная линия может быть получена с применением информации о движении подблока, например, таким образом, что получаемая в результате левая опорная линия смежна с подблоком ‘B’, как показано в части (b) на фиг. 14. В соответствии с вариантами осуществления в таком случае во время компенсации движения может быть получен больший блок размера (WL+WS+WR)×(HS+HB), и (например, затем) может быть выбрана левая опорная линия.
На фиг. 15 представлена схема, иллюстрирующая опорные линии подблока в соответствии с вариантами осуществления.
В соответствии с вариантами осуществления для подблока ‘D’ левая и верхняя опорные линии могут применяться, как показано в части (а) на фиг. 15, например, когда они расположены дальше от подблока. В соответствии с вариантами осуществления левая и верхняя опорные линии могут (например, также) быть получены с применением информации о движении, например, в результате чего образуются опорные линии, смежные с подблоком, как показано в части (b) на фиг. 15.
В соответствии с вариантами осуществления для уменьшения ширины полосы доступа к памяти для любого (например, обоих) из подходов на основе CU и подблоков, вектор движения, применяемый для получения правой и нижней эталонных семплов для планарного прогнозирования, может быть округлен до целочисленного движения. В соответствии с вариантами осуществления (например, только) одиночное прогнозирование можно применять для генерирования (например, таких) эталонных семплов, например, даже если кандидат взаимного объединения представляет собой двойное прогнозирование. В качестве другого примера, в соответствии с вариантами осуществления, эталонное изображение в двух списках, расположенное ближе к текущему изображению, может быть выбрано для компенсации движения. В таком случае целочисленное движение и одиночное прогнозирование могут быть объединены, например, для дальнейшего уменьшения ширины полосы памяти.
Модифицированное внутрипланарное прогнозирование
В соответствии с вариантами осуществления модифицированное внутрипланарное прогнозирование может быть выполнено, например, после определения правой и нижней эталонных семплов в соответствии с описанными выше вариантами осуществления. В соответствии с вариантами осуществления семплы в CU можно прогнозировать в соответствии со следующими уравнениями 4–6:

где правая и нижняя представляют собой правую и нижнюю опорные линии, соответственно. Другие обозначения в уравнениях 4–6 могут быть такими же, как и описанные выше.
Сигнализация для нового планарного режима
В соответствии с вариантами осуществления планарный режим объединения может быть применен к компоненту яркости (например, ограничен только им). В соответствии с вариантами осуществления планарный режим объединения может быть применен как к компоненту яркости, так и к компоненту цветности. В соответствии с вариантами осуществления в случае, когда планарный режим объединения ограничен только компонентом яркости, прямой режим (DM) в цветности может применять только обычный планарный режим, хотя соответствующий блок яркости может применять планарный режим объединения.
На фиг. 16 представлена схема, иллюстрирующая блок-схему сигнализации флага планарного режима объединения в соответствии с вариантами осуществления.
В соответствии с вариантами осуществления флаг, связанный с планарным режимом объединения, может быть сигнализирован. В соответствии с вариантами осуществления флаг, связанный с планарным режимом объединения, может быть сигнализирован в случае выполнения условий. Например, как показано на фиг. 16, флаг планарного режима объединения может быть сигнализирован в соответствии с (например, на его основании) любым (например, всеми) из следующих условий, подлежащих выполнению: (1) текущий срез представляет собой взаимный срез (P-срез или B-срез); (2) текущий CU представляет собой внутренний CU; (3) внутренний режим представляет собой планарный режим; и (4) доступна информация о движении соседних элементов.
В соответствии с вариантами осуществления для вышеописанной схемы на основе CU последнее вышеописанное условие (например, условие 4) может проверять (например, определять), доступны ли пространственные соседние кандидаты. В соответствии с вариантами осуществления такая проверка (например, определение) может быть выполнена в случае, когда доступны оба из верхнего пространственного кандидата (например, по меньшей мере один из B0 или B1) и левого пространственного кандидата (например, по меньшей мере один из A0 или A1). В соответствии с вариантами осуществления проверка (например, определение) может быть выполнена в случае доступности какого-либо (например, одного) пространственного кандидата.
В соответствии с вариантами осуществления для описанной выше схемы на основе подблоков последнее условие (например, условие 4) может проверять, доступна ли действительная информация о движении для получения информации о движении подблоков. В соответствии с вариантами осуществления в случае, когда выполнены все вышеуказанные условия, может быть сигнализирован флаг планарного объединения. В соответствии с вариантами осуществления в случае, когда разрешен планарный режим объединения, флаг уровня CU, равный единице, может быть сигнализирован в битовом потоке, и в битовом потоке может быть сигнализирован флаг уровня CU, равный нулю.
На фиг. 17 представлена схема, иллюстрирующая блок-схему сигнализации флага планарного режима объединения в соответствии с вариантами осуществления.
В соответствии с вариантами осуществления флаг уровня CU может быть сигнализирован в случае выполнения любого количества условий (например, большего или меньшего, чем количество условий, показанных на фиг. 16). Например, как показано на фиг. 17, флаг планарного режима объединения может быть отправлен при выполнении трех условий.
На фиг. 18 представлена схема, иллюстрирующая блок-схему сигнализации для схемы на основе CU в соответствии с вариантами осуществления.
В соответствии с вариантами осуществления схема на основе CU может адаптивно выбирать опорные линии, которые должны быть получены с применением информации о движении в соответствии с описанными выше вариантами осуществления. В соответствии с вариантами осуществления в схеме на основе CU может быть применена (например, необходима, требуется) сигнализация для указания любой из правой, нижней или обеих опорных линий, которые могут быть (например, должны быть) получены, как показано на фиг. 18. В соответствии с вариантами осуществления данная схема на основе CU может увеличивать количество флагов уровня CU, которые могут быть сигнализированы, до трех.
На фиг. 19 представлена схема, иллюстрирующая блок-схему сигнализации для адаптивной схемы в соответствии с вариантами осуществления.
В соответствии с вариантами осуществления для каждого CU кодер может адаптивно выбирать любой из подходов на основе CU и на основе подблоков, например, в зависимости от затрат на искажение скорости передачи. В соответствии с вариантами осуществления в такой адаптивной схеме может быть применен (например, необходим, требуется и т.д.) дополнительный флаг уровня CU для сигнализации, как показано на фиг. 19. В соответствии с вариантами осуществления одно значение флага (например, флаг=1) может указывать на подход на основе CU, а другое значение флага (например, флаг=0) может указывать на подход на основе подблоков.
Выбор режима в кодере
В соответствии с вариантами осуществления кодер может всегда включать в себя планарный режим объединения в качестве кандидата при выборе внутреннего режима с применением затрат на искажение скорости передачи данных (RD). В соответствии с вариантами осуществления планарный режим объединения можно первоначально сравнить с другими внутренними режимами с применением затрат на сумму абсолютной разности преобразований (SATD), например, для выбора подмножества режимов-кандидатов, которые необходимо дополнительно сравнить с применением затрат на RD. Во время такого процесса первоначального выбора кандидатов (например, выбор подмножества режимов-кандидатов) планарный режим объединения может давать более высокие затраты на SATD и, например, может не быть выбран для дополнительного тестирования с применением затрат на RD.
Улучшение внутреннего углового прогнозирования
На фиг. 20 и 21 представлены схемы, иллюстрирующие внутреннее угловое прогнозирование в соответствии с вариантами осуществления.
В соответствии с вариантами осуществления для внутреннего углового прогнозирования семплы из верхней и/или левой опорных линий можно применять для прогнозирования семплов в CU. Например, как показано на фиг. 20, в случае (например, определенного) направления прогнозирования семпл ‘P’ в CU можно прогнозировать с помощью семпла ‘X’ в (например, из) верхней опорной линии. В случае CU больших размеров точность внутреннего углового прогнозирования семплов, которые находятся ближе к правой и нижней границам, может быть ниже, например, из-за того, что они находятся дальше от верхней и левой опорных линий. В соответствии с вариантами осуществления правую и нижнюю опорные линии можно прогнозировать в соответствии с вариантами осуществления, описанными выше и как показано на фиг. 21.
В соответствии с вариантами осуществления семплы в CU можно прогнозировать путем вычисления средневзвешенного значения семплов, принадлежащих верхней/левой опорной линии, и семплов, принадлежащих правой/нижней опорной линии. Это проиллюстрировано на фиг. 21. Например, в соответствии с вариантами осуществления семпл ‘P’ можно прогнозировать путем взвешенного усреднения верхнего эталонного семпла ‘X’ и правого эталонного семпла ‘R’. В соответствии с вариантами осуществления местоположение эталонного семпла ‘R’ может быть определено посредством (например, в соответствии с, на основании) направления прогнозирования (например, выбранного режима направленного внутреннего прогнозирования) и положения семпла ‘P’. В случае, когда местоположение эталонного семпла ‘R’ находится на (например, имеет, расположено на и т.д.) положении фракционного семпла, его значение может интерполироваться из соседних эталонных семплов. В соответствии с вариантами осуществления весовые значения, применяемые для усреднения ‘X’ и ‘R’, могут быть выбраны, например, на основании их относительного расстояния от семпла ‘P’, или же могут быть выбраны равные весовые значения. В соответствии с вариантами осуществления внутренний угловой режим, описанный в настоящем документе, также может называться угловым режимом объединения.
В соответствии с вариантами осуществления сигнализация для углового режима объединения может быть аналогичной сигнализации для планарного режима объединения, описанного выше. В соответствии с вариантами осуществления флаг (например, для сигнализации углового режима объединения) может быть сигнализирован в зависимости (например, для выполнения) любого из следующих условий: (1) текущий срез представляет собой взаимный срез (например, P-срез или B-срез); (2) текущий CU представляет собой внутренний CU; (3) внутренний режим представляет собой угловой режим; и (4) доступна информация о движении соседних элементов. В соответствии с вариантами осуществления флаг может быть установлен на единице, например, в случае выбора углового режима объединения, в противном случае флаг может быть установлен на ноле, или наоборот.
В соответствии с вариантами осуществления заголовки сигнализации могут быть уменьшены. В соответствии с вариантами осуществления угловой режим объединения может быть применен к CU большего размера, например, к таким блокам, которые имеют ширину и/или высоту, превышающую (например, определенное) пороговое значение. В соответствии с вариантами осуществления пороговое значение для применения углового режима объединения может быть предварительно задано, настроено, вычислено и т.д. В соответствии с вариантами осуществления угловой режим объединения может быть ограничен CU, площадь (например, ширина, умноженная на высоту) которого превышает пороговое значение. В соответствии с вариантами осуществления пороговое значение для ограничения применения углового режима объединения может быть предварительно задано, настроено, вычислено, сигнализировано и т.д.
В соответствии с вариантами осуществления режим DC может быть улучшен с помощью правой и нижней опорных линий, которые могут быть получены на основании информации о движении соседних элементов, например, аналогично планарному режиму объединения. В соответствии с вариантами осуществления в случае режима DC прогнозируемые семплы DC могут представлять собой среднее значение семплов в левой, верхней, правой и нижней опорных линиях. В соответствии с вариантами осуществления для неквадратных CU среднее значение двух более длинных опорных линий (например, либо (1) верхней и нижней опорных линий; либо (2) левой и правой опорных линий) можно применять в качестве прогнозирования DC.
Заключение
Хотя признаки и элементы описаны выше в конкретных комбинациях, специалисту в данной области будет очевидно, что каждый признак или элемент можно использовать отдельно или в любой комбинации с другими признаками и элементами. Кроме того, описанные в настоящем документе способы могут быть реализованы в компьютерной программе, программном обеспечении или программно-аппаратном обеспечении, встроенном в машиночитаемый носитель и предназначенном для исполнения компьютером или процессором. Примеры энергозависимого машиночитаемого носителя информации включают в себя, без ограничений, постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ), регистр, кэш-память, полупроводниковые устройства хранения данных, магнитные носители, такие как внутренние жесткие диски и съемные диски, магнитооптические носители и оптические носители, такие как диски CD-ROM и цифровые универсальные диски (DVD). Процессор в сочетании с программным обеспечением можно использовать для реализации радиочастотного приемопередатчика, предназначенного для использования в составе UE, WTRU, терминала, базовой станции, RNC или любого главного компьютера.
Кроме того, в описанных выше вариантах осуществления могут быть применены платформы для выполнения обработки, вычислительные системы, контроллеры и другие устройства, включая ограничивающий сервер и точку стыковки / сервер, содержащие процессоры. Эти устройства могут содержать по меньшей мере один центральный процессор (ЦП) и запоминающее устройство. Как свидетельствует практика специалистов в области компьютерного программирования, указания на действия и символические представления этапов или команд могут быть реализованы с помощью различных ЦП и запоминающих устройств. Такие действия и этапы или инструкции могут упоминаться как «исполняемые», «исполняемые с помощью компьютера» или «исполняемые с помощью ЦП».
Для специалиста в данной области будет очевидно, что указанные действия и символически представленные этапы или команды включают в себя управление электрическими сигналами с помощью ЦП. Электрическая система выдает биты данных, которые могут инициировать итоговое преобразование или ослабление электрических сигналов и сохранение битов данных в ячейках запоминающего устройства в системе запоминающего устройства, чтобы таким образом переконфигурировать или иным образом изменить работу ЦП, а также другую обработку сигналов. Ячейки запоминающего устройства, в которых хранятся биты данных, представляют собой физические местоположения, которые обладают определенными электрическими, магнитными, оптическими или органическими свойствами, соответствующими битам данных или характерными для битов данных. Следует понимать, что примеры осуществления не ограничены вышеупомянутыми платформами или ЦП и что другие платформы и ЦП также могут поддерживать предложенные способы.
Биты данных также могут храниться на машиночитаемом носителе, в том числе на магнитных дисках, оптических дисках и любом другом энергозависимом (например, оперативное запоминающее устройство (ОЗУ)) или энергонезависимом (например, постоянное запоминающее устройство (ПЗУ)) накопителе большой емкости, считываемом ЦП. Машиночитаемый носитель может включать в себя взаимодействующий или взаимосвязанный машиночитаемый носитель, применяемый исключительно в системе обработки или распределенный между множеством взаимосвязанных систем обработки, которые могут быть локальными или удаленными по отношению к указанной системе обработки. При этом подразумевается, что типовые варианты осуществления не ограничены вышеупомянутыми запоминающими устройствами и что другие платформы и запоминающие устройства также могут поддерживать описанные способы.
В иллюстративном варианте осуществления любые этапы, способы и т.п., описанные в настоящем документе, могут быть реализованы в виде машиночитаемых команд, хранящихся на машиночитаемом носителе. Процессор мобильного устройства, сетевой элемент и/или любое другое вычислительное устройство могут быть выполнены с возможностью исполнения машиночитаемых команд.
Между аппаратными и программными реализациями аспектов систем остаются незначительные различия. Использование аппаратного или программного обеспечения, как правило (но не всегда, поскольку в определенных контекстах различие между аппаратным и программным обеспечением может стать значительным), предполагает выбор конструкции, представляющей собой компромисс между затратами и эффективностью. Могут существовать различные средства, с помощью которых могут быть реализованы способы, и/или системы, и/или другие технологии, описанные в данном документе (например, аппаратное обеспечение, программное обеспечение и/или микропрограммное обеспечение), а предпочтительное средство может быть выбрано в зависимости от контекста, в котором развернуты указанные способы, и/или системы, и/или другие технологии. Например, если разработчик определяет, что скорость и точность имеют первостепенное значение, он может применять главным образом аппаратное и/или микропрограммное средство. Если наиболее важной является гибкость, разработчик может выбирать реализацию главным образом в виде программного обеспечения. В альтернативном варианте осуществления разработчик может применять комбинацию аппаратного обеспечения, программного обеспечения и/или микропрограммного обеспечения.
В приведенном выше подробном описании изложены различные варианты осуществления устройств и/или способов с применением блок-схем, структурных схем и/или примеров. Поскольку такие блок-схемы, структурные схемы и/или примеры содержат одну или более функций и/или операций, для специалистов в данной области будет очевидно, что каждая функция и/или операция в таких блок-схемах, структурных схемах или примерах могут быть реализованы отдельно и/или совместно с применением широкого спектра аппаратного обеспечения, программного обеспечения, микропрограммного обеспечения или по существу любой их комбинации. Подходящие процессоры включают в себя, в качестве примера, процессор специального назначения, стандартный процессор, цифровой сигнальный процессор (DSP), множество микропроцессоров, один или более микропроцессоров, связанных с ядром DSP, контроллер, микроконтроллер, специализированные интегральные микросхемы (ASIC), стандартные части специализированной интегральной схемы (ASSP), схемы программируемых пользователем вентильных матриц (FPGA), интегральную схему (IC) любого другого типа и/или конечный автомат.
Хотя признаки и элементы представлены выше в конкретных комбинациях, специалисту в данной области будет очевидно, что каждый признак или элемент может быть использован отдельно или в любой комбинации с другими признаками и элементами. Настоящее изобретение не ограничивается описанными в настоящей заявке конкретными вариантами осуществления, которые предназначены для иллюстрации различных аспектов. Для специалистов в данной области будет очевидно, что возможно внесение множества модификаций и изменений без отступления от сущности и объема настоящего изобретения. Никакие элементы, действия или команды, используемые в описании настоящей заявки, не следует рассматривать как критические или существенные для изобретения, если явным образом не указано иное. Функционально эквивалентные способы и устройства, входящие в объем описания, в дополнение к перечисленным в настоящем документе станут очевидными для специалистов в данной области после ознакомления с представленными выше описаниями. Предполагается, что такие модификации и изменения включены в объем прилагаемой формулы изобретения. Настоящее описание ограничивается исключительно прилагаемой формулой изобретения, а также полным диапазоном эквивалентов, к которым относится такая формула изобретения. Следует понимать, что настоящее описание не ограничивается конкретными способами или системами.
Кроме того, следует понимать, что применяемые в настоящем документе термины используют только в целях описания конкретных вариантов осуществления настоящего изобретения и они не носят ограничительного характера. Используемые в настоящем документе термин «оборудование пользователя» и его аббревиатура UE могут означать (i) модуль беспроводной передачи и/или приема (WTRU), например, как описано ниже; (ii) любой из некоторого количества вариантов осуществления WTRU, например, как описано ниже; (iii) беспроводное и/или проводное (например, подключаемое) устройство, выполненное, в частности, с применением некоторых или всех конструкций и функциональных возможностей WTRU, например, как описано ниже; (iii) беспроводное и/или проводное устройство, выполненное не со всеми конструкциями и функциональными возможностями WTRU, например, как описано ниже; или (iv) т. п. Ниже представлена подробная информация относительно примера модуля WTRU, который может представлять собой любой WTRU, описанный в настоящем документе.
В определенных типовых вариантах осуществления некоторые части объекта изобретения, описанного в настоящем документе, могут быть реализованы с помощью специализированных интегральных схем (ASIC), программируемых пользователем вентильных матриц (FPGA), цифровых сигнальных процессоров (DSP) и/или интегральных схем других форматов. Однако для специалистов в данной области будет очевидно, что некоторые аспекты описанных в настоящем документе вариантов осуществления полностью или частично могут быть эквивалентно реализованы в интегральных схемах в виде одной или более компьютерных программ, выполняемых на одном или более компьютерах (например, в виде одной или более программ, выполняемых в одной или более компьютерных системах), в виде одной или более программ, выполняемых на одном или более процессорах (например, в виде одной или более программ, выполняемых на одном или более микропроцессорах), в виде микропрограммного обеспечения или в виде по существу любой их комбинации и что разработка схем и/или написание кода для программного обеспечения и/или микропрограммного обеспечения будет вполне по силам специалисту в данной области после ознакомления с настоящим описанием. Кроме того, для специалистов в данной области будет очевидно, что механизмы объекта изобретения, описанные в настоящем документе, могут быть распределены в виде программного продукта в множестве форм и что иллюстративный вариант осуществления объекта изобретения, описанный в настоящем документе, применяют независимо от конкретного типа среды передачи сигналов, используемой для фактического осуществления такого распределения. Примеры носителя сигнала включают в себя, без ограничений, следующее: носитель, выполненный с возможностью записи, например, гибкий диск, накопитель на жестком диске, CD, DVD, магнитную ленту для цифровой записи, запоминающее устройство компьютера и т.д., а также носитель, выполненный с возможностью передачи, такой как цифровая и/или аналоговая среда передачи данных (например, оптоволоконный кабель, волновод, проводная линия связи, беспроводная линия связи и т.д.).
Описанный в настоящем документе объект изобретения иногда иллюстрирует различные компоненты, содержащиеся внутри различных других компонентов или соединенные с ними. Следует понимать, что такие показанные архитектуры являются лишь примерами и что фактически можно реализовать различные другие архитектуры с такой же функциональностью. В концептуальном смысле любая конструкция компонентов для получения такой же функциональности практически «связана» с возможностью обеспечения желаемой функциональности. Следовательно, любые два компонента, скомбинированные в настоящем документе для достижения конкретной функциональности, можно рассматривать как «связанные» друг с другом с возможностью обеспечения желаемой функциональности, независимо от архитектур или промежуточных компонентов. Аналогично любые два компонента, соединенные таким образом, можно рассматривать как «функционально соединенные» или «функционально связанные» друг с другом для обеспечения желаемой функциональности, и любые два компонента, которые могут быть связаны таким образом, также могут рассматриваться как «имеющие возможность функционального соединения» друг с другом для обеспечения желаемой функциональности. Конкретные примеры функционально соединяемых компонентов включают в себя, без ограничений, компоненты, выполненные с возможностью физического сопряжения, и/или физического, и/или логического, и/или беспроводного взаимодействия, и/или компоненты, взаимодействующие логически и/или беспроводным образом.
В отношении применения по существу любых вариантов множественного и/или единственного числа для терминов в настоящем документе специалисты в данной области могут изменять множественное число на единственное и/или единственное число на множественное в соответствии с требованиями контекста и/или сферой применения. В настоящем документе различные комбинации единственного/множественного числа для ясности могут быть указаны явным образом.
Для специалистов в данной области будет очевидно, что в целом термины, используемые в настоящем документе, и в частности в прилагаемой формуле изобретения (например, в главной части прилагаемой формулы изобретения), как правило, считаются «неограничивающими» терминами (например, термин «включающий» следует интерпретировать как «включающий, без ограничений», термин «имеющий» следует интерпретировать как «имеющий по меньшей мере», термин «включает» следует интерпретировать как «включает, без ограничений» и т.д.). Кроме того, для специалистов в данной области будет очевидно, что если предполагается конкретное количество включенных пунктов с изложением формулы изобретения, такое намерение будет явным образом указано в формуле изобретения, а в отсутствие такого упоминания такого намерения нет. Например, если речь идет только об одном элементе, может быть использован термин «один» или аналогичный термин. Для облегчения понимания нижеследующая прилагаемая формула изобретения и/или описания в данном документе могут содержать вводные фразы «по меньшей мере один» и «один или более» для введения перечисления пунктов формулы изобретения. Однако использование таких фраз не следует истолковывать как подразумевающее, что введение перечисления пунктов формулы изобретения с грамматическими формами единственного числа ограничивает любой конкретный пункт формулы изобретения, содержащий такое введенное перечисление пунктов формулы изобретения, вариантами осуществления, содержащими только одно такое перечисление, даже если тот же пункт включает вводные фразы «один или более» или «по меньшей мере один» и грамматические формы единственного числа (например, грамматические формы единственного числа следует интерпретировать как означающие «по меньшей мере» или «один или более»). То же самое справедливо в отношении применения определенных грамматических форм, используемых для введения перечисления пунктов формулы изобретения. Кроме того, даже если явным образом указано конкретное количество включенных перечисленных пунктов формулы изобретения, для специалистов в данной области будет очевидно, что такое перечисление следует интерпретировать как означающее по меньшей мере указанное количество (например, простое указание «двух пунктов» без других определений означает по меньшей мере два пункта или же два или более пунктов). Кроме того, в случае использования правила, аналогичного правилу «по меньшей мере одно из A, B и C и т.д.», в общем случае для специалиста в данной области понятно правило, подразумеваемое такой конструкцией (например, «система, содержащая по меньшей мере одно из A, B и C» будет включать, без ограничений, системы, которые содержат только A, только B, только C, одновременно A и B, одновременно A и C, одновременно B и C и/или одновременно A, B и C и т.д.). В случае использования правила, аналогичного правилу «по меньшей мере одно из A, B или C и т.д.», в общем случае для специалиста в данной области понятно правило, подразумеваемое такой конструкцией (например, «система, содержащая по меньшей мере одно из A, B или C» будет включать в себя, без ограничений, системы, которые содержат только A, только B, только C, одновременно A и B, одновременно A и C, одновременно B и C и/или одновременно A, B и C и т.д.). Кроме того, для специалистов в данной области будет очевидно, что по существу любое разделяющее слово и/или разделяющую фразу, представляющие два или более альтернативных терминов, будь то в описании, формуле изобретения или на чертежах, следует понимать как предполагаемую возможность включения одного из терминов, любого из терминов или обоих терминов. Например, фразу «A или B» следует понимать как включающую возможности «A», или «B», или «A и B». Кроме того, используемый в настоящем документе термин «любой из», после которого следует перечень из множества элементов и/или множества категорий элементов, должен включать «любой из», «любая комбинация из», «любое множество из» и/или «любая комбинация из множества» элементов и/или категорий элементов, по отдельности или в сочетании с другими элементами и/или другими категориями элементов. Кроме того, используемый в настоящем документе термин «набор» или «группа» включает в себя любое количество элементов, включая ноль. Кроме того, используемый в настоящем документе термин «количество» включает в себя любое количество, включая ноль.
Кроме того, если признаки или аспекты настоящего описания описаны в терминах групп Маркуша, для специалистов в данной области будет очевидно, что настоящее описание, таким образом, также описано в терминах любого отдельного члена или подгруппы членов группы Маркуша.
Как будет очевидно для специалиста в данной области, для всех целей, таких как обеспечение письменного описания, все диапазоны, описанные в настоящем документе, также охватывают все их возможные поддиапазоны и комбинации поддиапазонов. Любой из перечисленных диапазонов может быть легко распознан как представляющий достаточное описание и как диапазон, который можно разбить на по меньшей мере равные половины, трети, четверти, пятые части, десятые части и т.д. В примере, не имеющем ограничительного характера, каждый диапазон, описанный в данном документе, можно легко разбить в нижнюю треть, среднюю треть и верхнюю треть, и т.д. Как будет очевидно для специалиста в данной области, все термины, такие как «вплоть до», «по меньшей мере», «более чем», «менее чем» и т.п. включают в себя указанное число и относятся к диапазонам, которые можно впоследствии разбить на поддиапазоны, как описано выше. И наконец, как будет очевидно для специалиста в данной области, диапазон включает в себя каждый отдельный элемент. Таким образом, например, группа, содержащая 1–3 соты, относится к группам, содержащим 1, 2 или 3 соты. Аналогично группа, содержащая 1–5 сот, относится к группам, содержащим 1, 2, 3, 4 или 5 сот, и т.д.
Кроме того, формулу изобретения не следует рассматривать как ограниченную предложенным порядком или элементами, если не указано иное. Кроме того, использование термина «предназначенный для» в любом пункте формулы изобретения предполагает ссылку на Свод законов США (U.S.C.) 35 §112, ¶ 6 или формат пункта формулы изобретения «средство плюс функция», и любой пункт формулы изобретения, не содержащий термин «средство», не указывает на предназначение для чего-либо.
Процессор в сочетании с программным обеспечением может быть использован для реализации радиочастотного приемопередатчика для использования в модуле беспроводной передачи/приема (WTRU), оборудовании пользователя (UE), терминале, базовой станции, объекте управления мобильностью (MME) или усовершенствованном пакетном ядре (EPC) или любом главном компьютере. WTRU может быть использован в сочетании с модулями, реализованными в аппаратном и/или программном обеспечении, включая систему радиосвязи с программируемыми параметрами (SDR) и другие компоненты, такие как камера, модуль видеокамеры, видеотелефон, телефон с громкоговорителем, вибрационное устройство, динамик, микрофон, телевизионный приемопередатчик, наушники с микрофоном, клавиатура, модуль Bluetooth®, радиоблок с частотной модуляцией (FM), модуль ближней радиосвязи (NFC), блок жидкокристаллического дисплея (LCD), блок дисплея на органических светодиодах (OLED), цифровой музыкальный проигрыватель, мультимедийный проигрыватель, модуль устройства для воспроизведения видеоигр, Интернет-браузер и/или любая беспроводная локальная сеть (WLAN) или модуль сверхширокополосной связи (UWB).
Хотя изобретение описано в контексте систем связи, предполагается, что указанные системы могут быть реализованы в виде программного обеспечения в микропроцессорах/компьютерах общего назначения (не показаны). В определенных вариантах осуществления одна или более функций различных компонентов могут быть реализованы в программном обеспечении, управляющем компьютером общего назначения.
Кроме того, хотя изобретение проиллюстрировано и описано в настоящем документе применительно к конкретным вариантам осуществления, изобретение не ограничено представленным подробным описанием. Напротив, в подробное описание в пределах объема и диапазона эквивалентов формулы изобретения могут быть внесены различные изменения без отступления от настоящего изобретения.
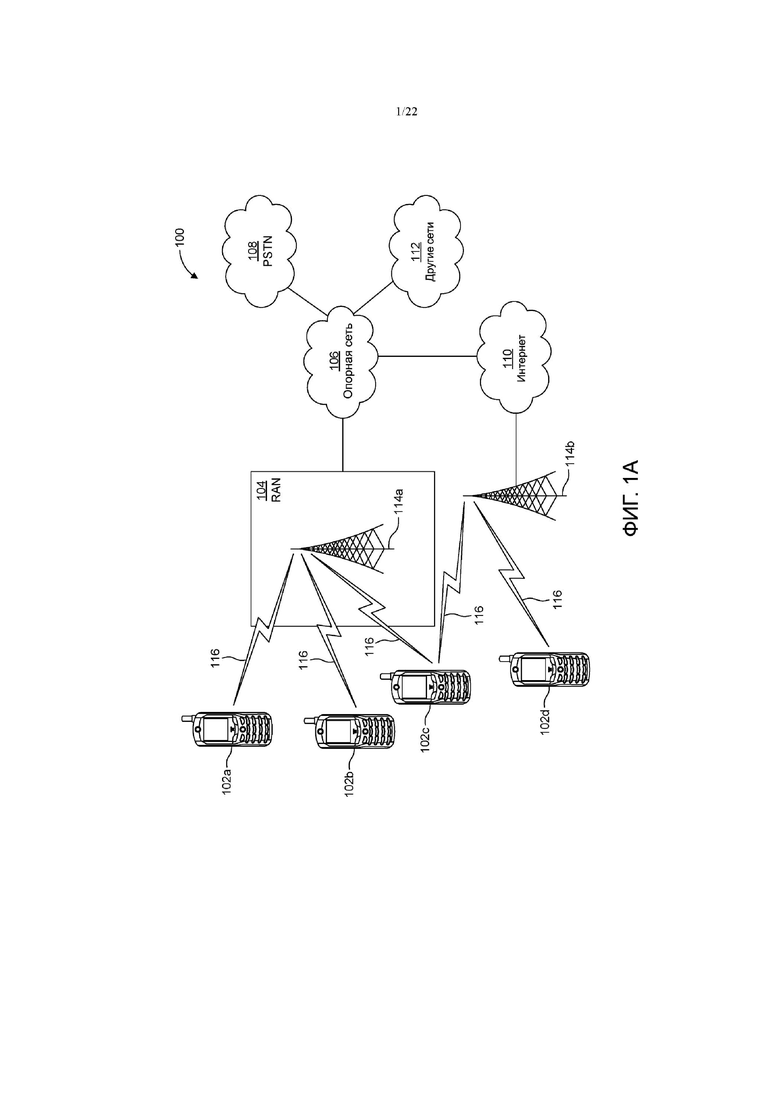
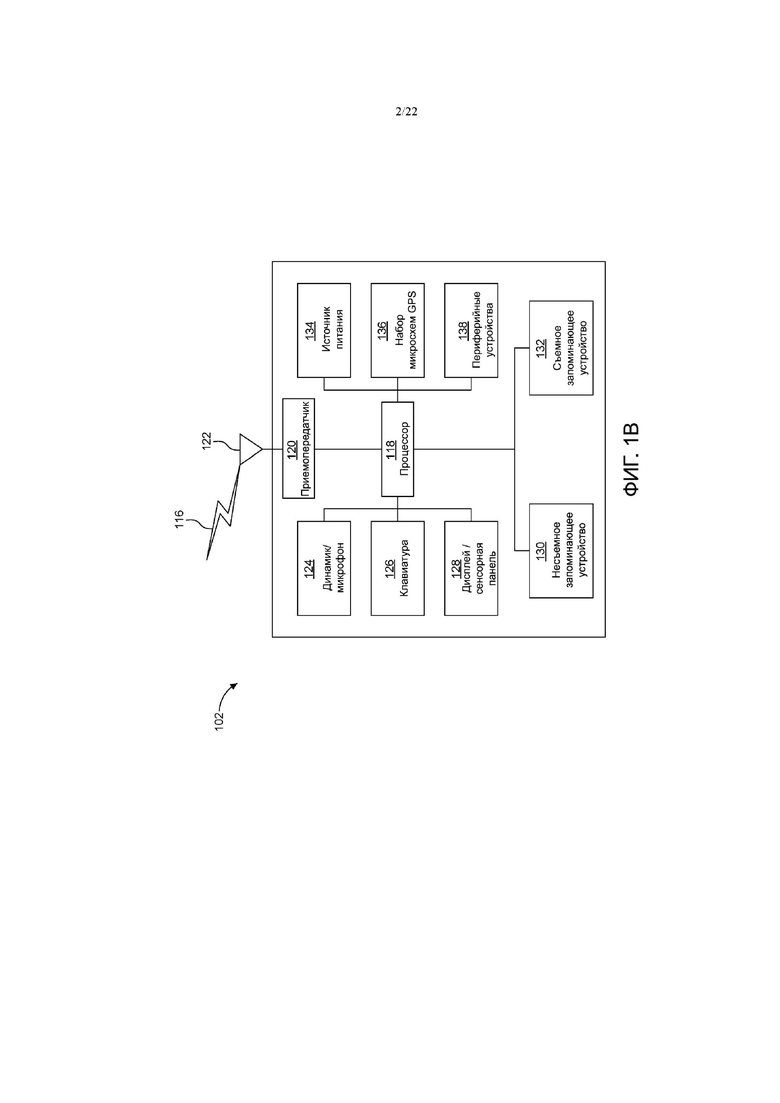
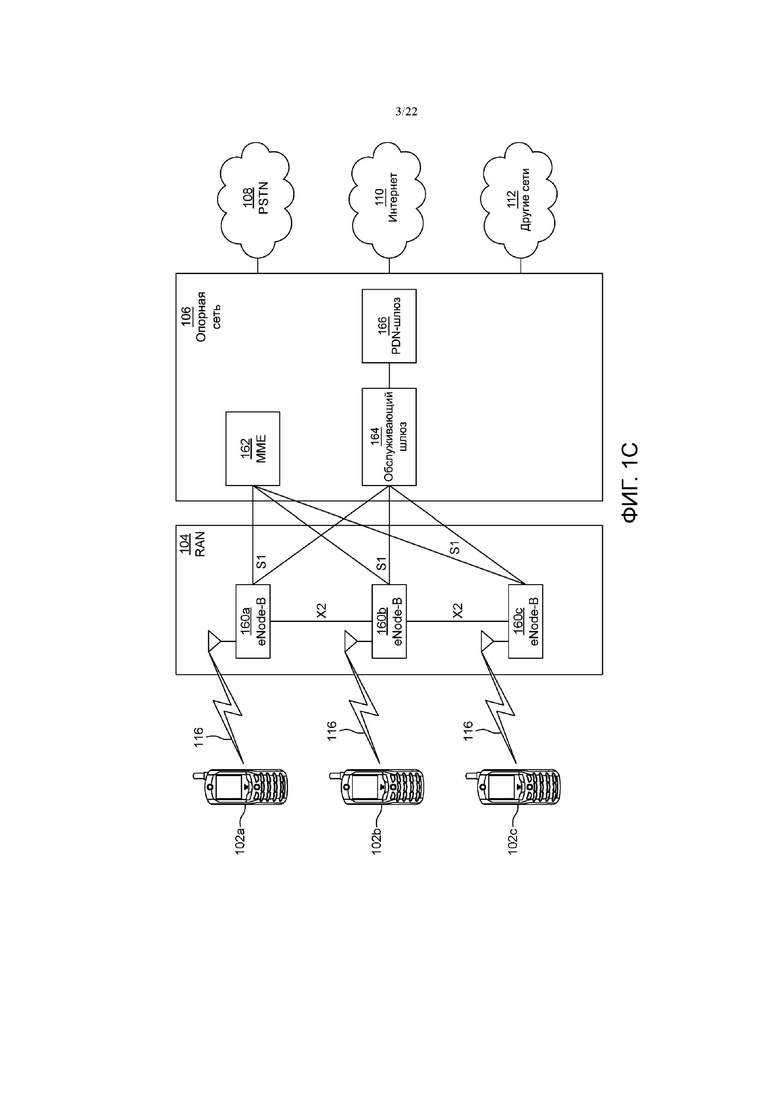






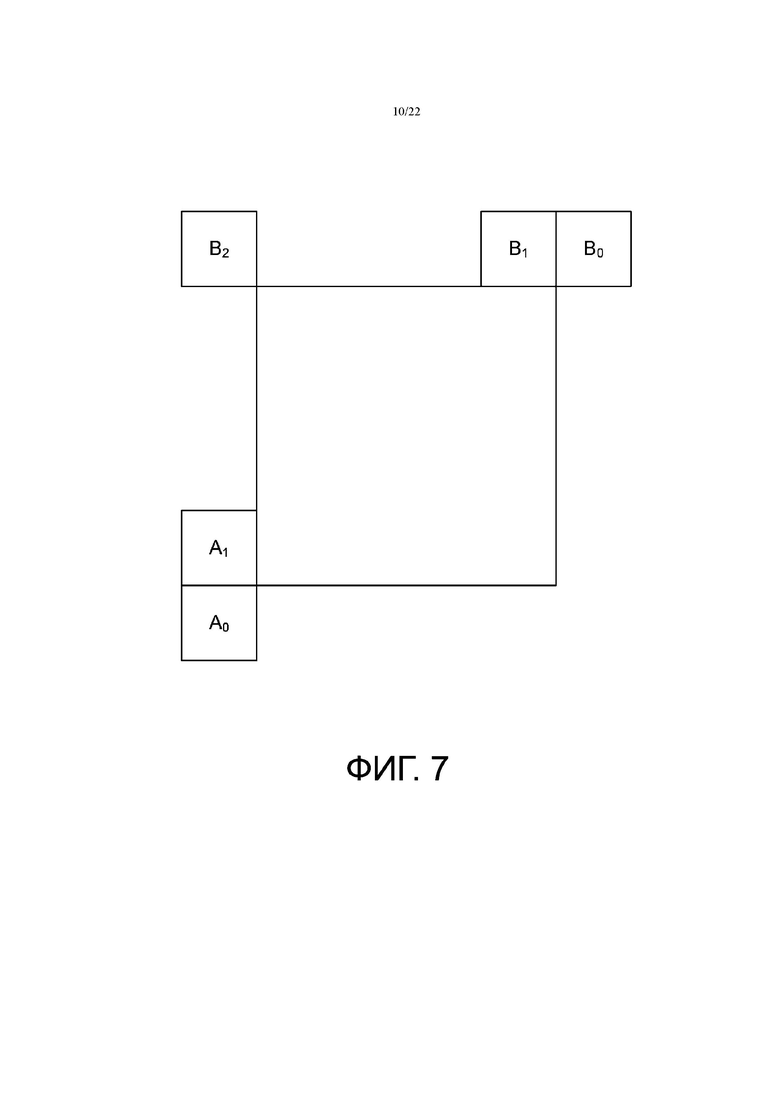

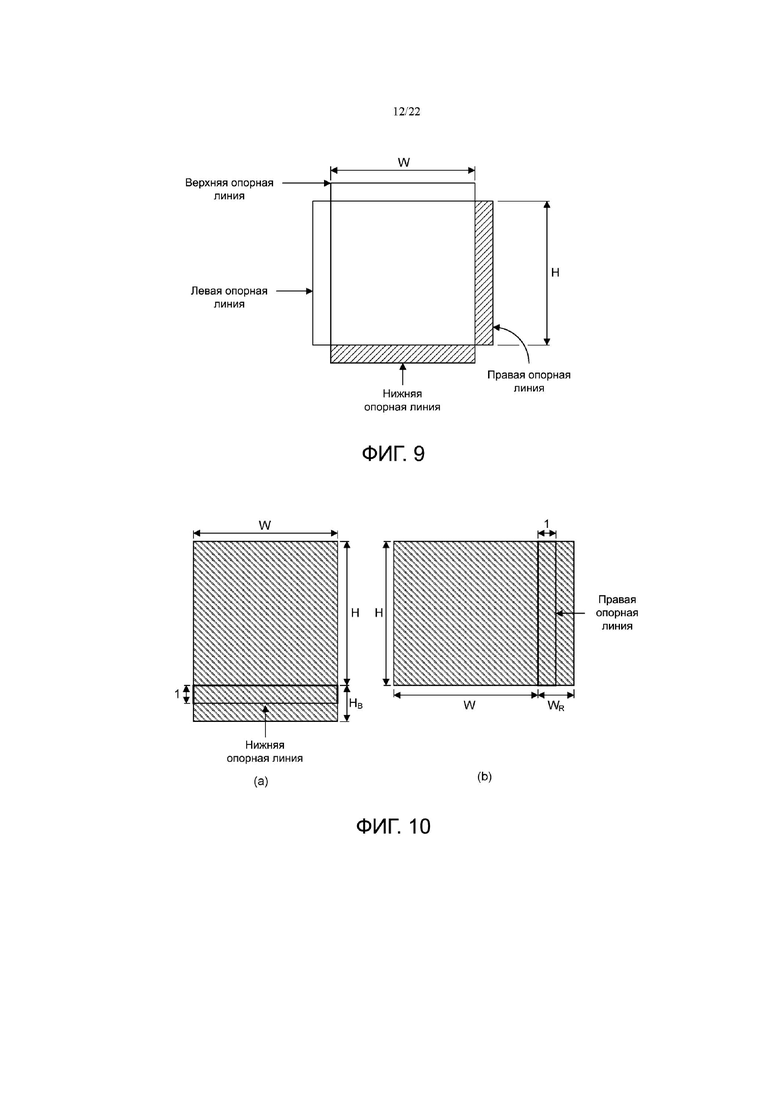
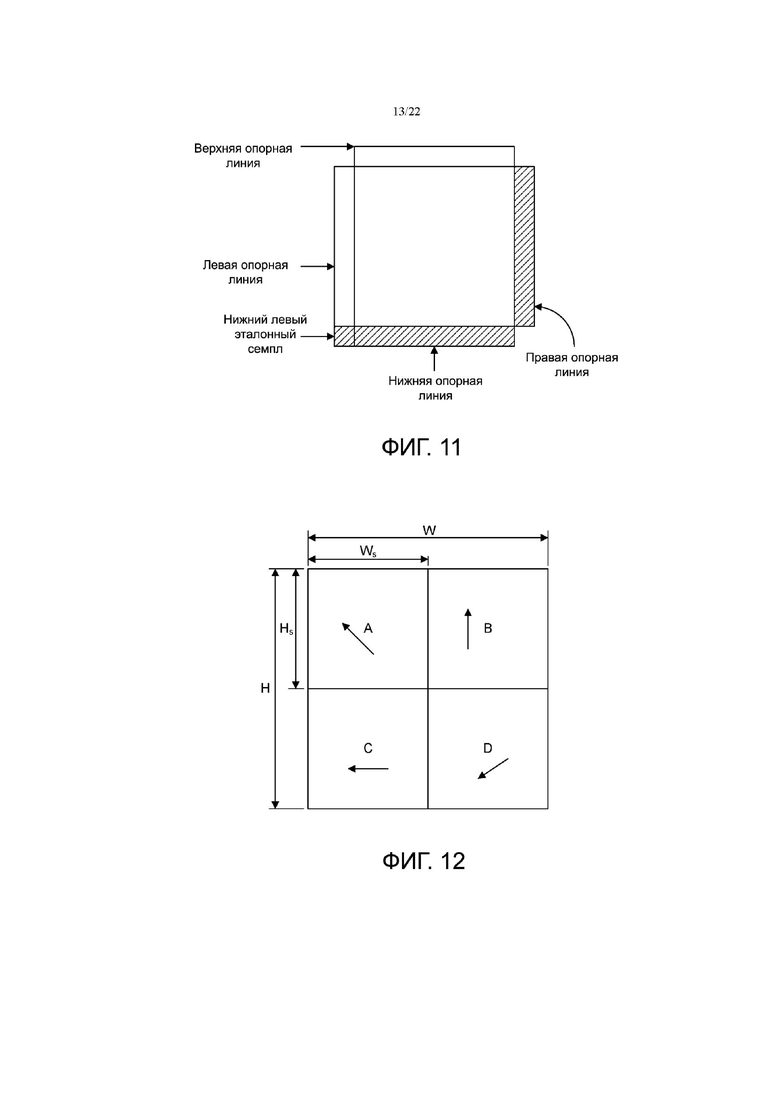
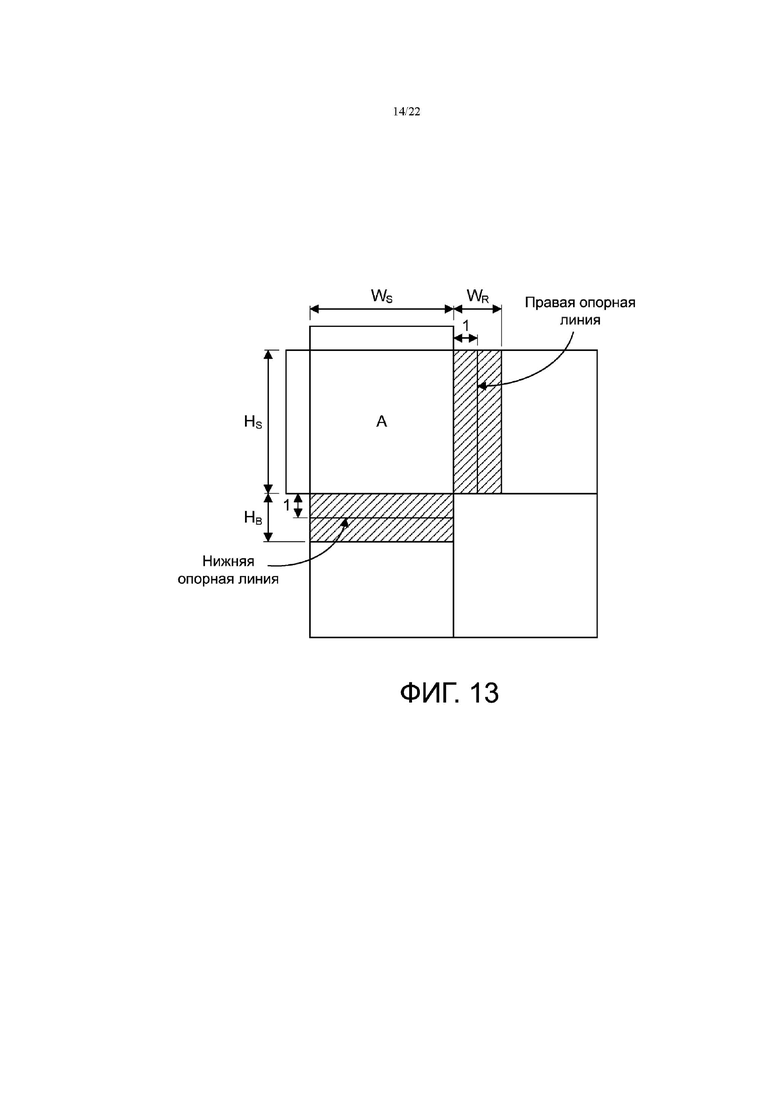

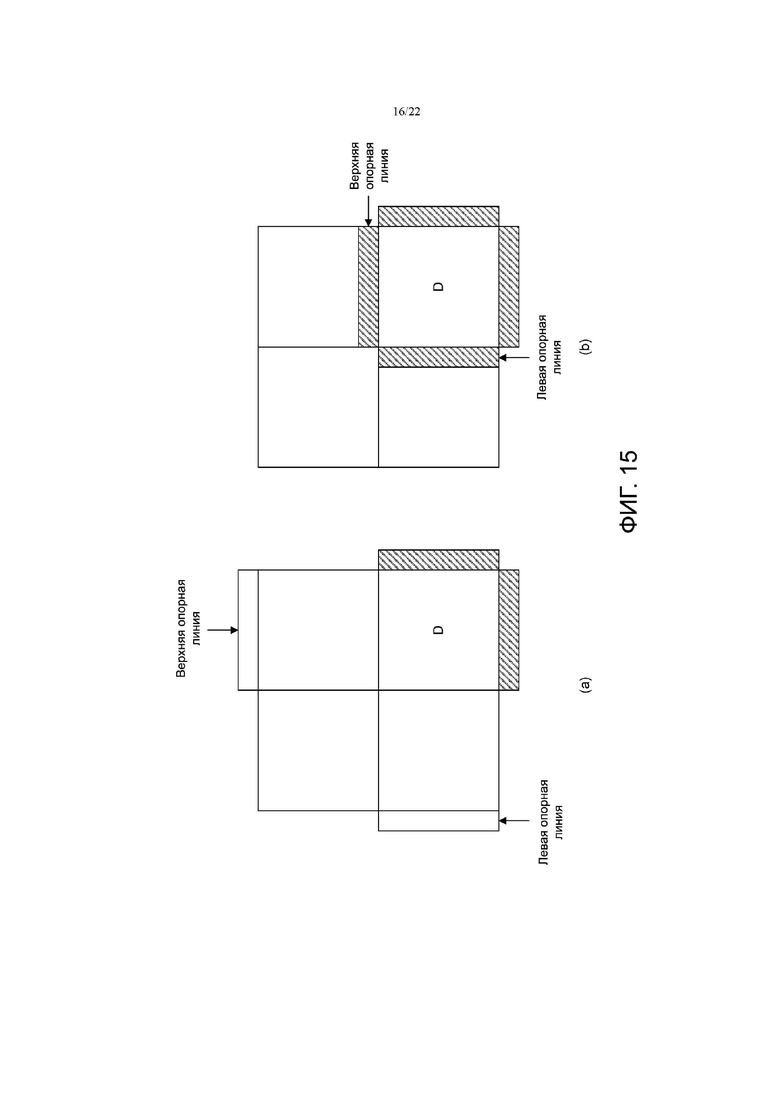

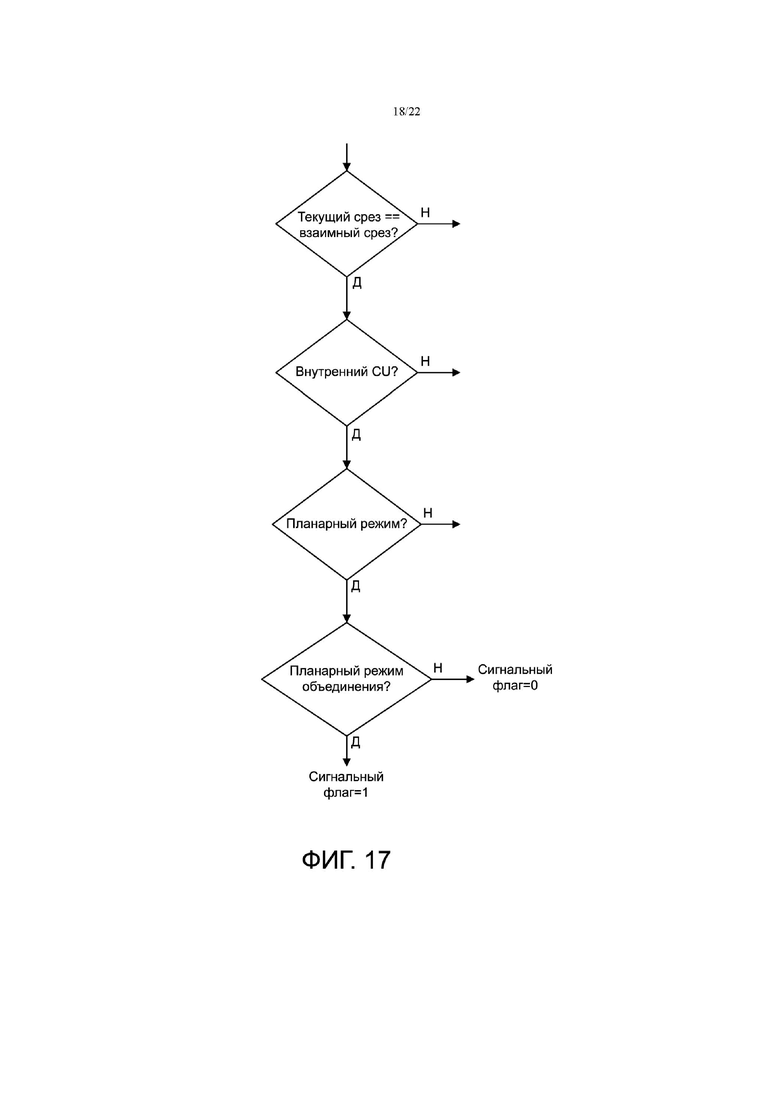

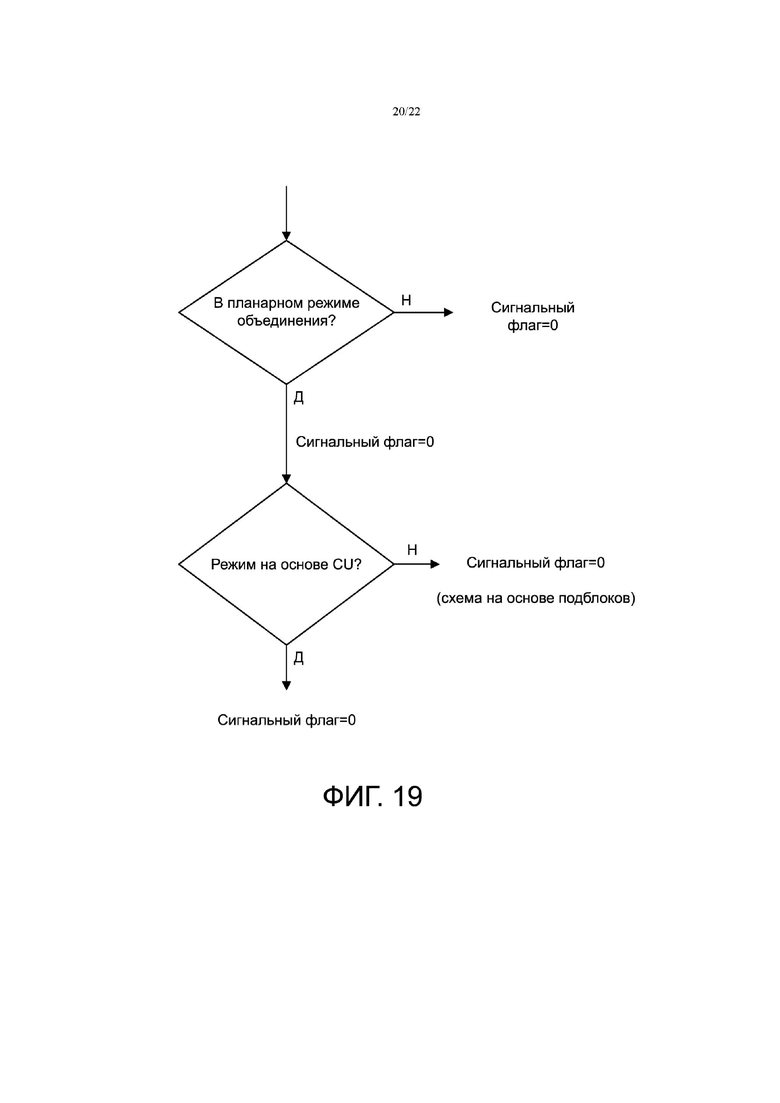

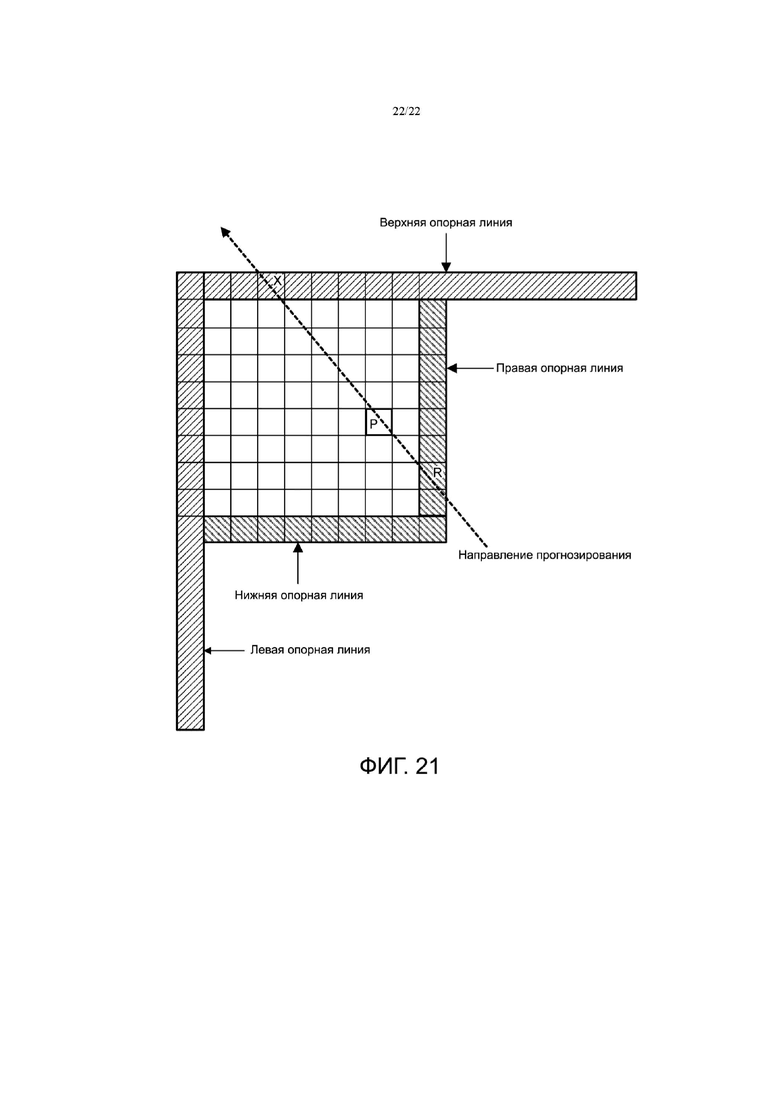
Изобретение относится к средствам для кодирования видеосигналов. Технический результат заключается в повышении эффективности кодирования видеосигналов. Выбирают пространственно соседний блок, который имеет информацию о движении, для прогнозирования. Определяют информацию о движении для текущего блока на основании информации о движении выбранного пространственного соседнего блока. Получают набор эталонных семплов, смежных с текущим блоком, посредством применения информации о движении для текущего блока. Выполняют внутреннее прогнозирование текущего блока с помощью по меньшей мере линии эталонных семплов из набора сгенерированных эталонных семплов. Линия эталонных семплов является смежной с текущим блоком и расположена вдоль края текущего блока. Выполнение внутреннего прогнозирования текущего блока дополнительно включает в себя применение другой линии эталонных семплов, причем эталонные семплы другой линии генерируют с применением информации о движении другого пространственного соседнего блока, смежного с текущим блоком, и другой пространственный соседний блок отличается от пространственного соседнего блока. 4 н. и 18 з.п. ф-лы, 24 ил.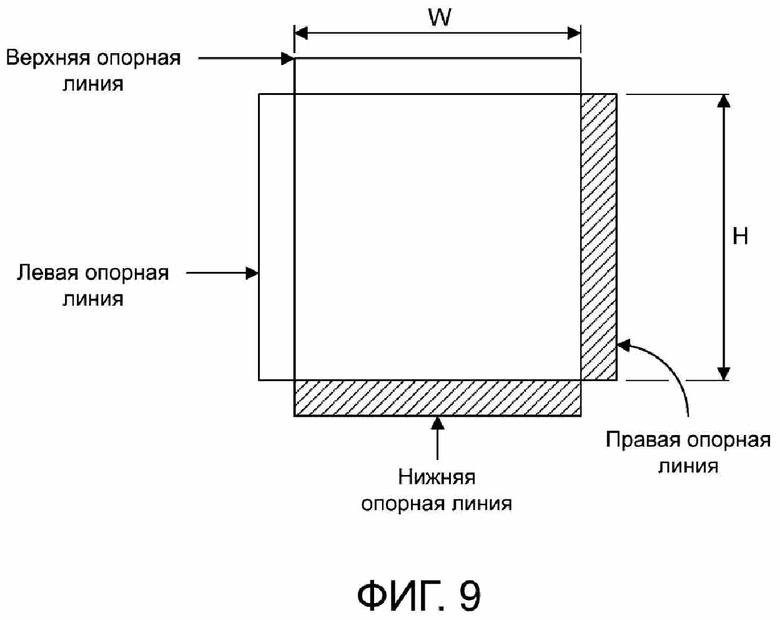
1. Способ кодирования видеосигналов, включающий:
выбор пространственного соседнего блока, который имеет информацию о движении, для прогнозирования;
определение информации о движении для текущего блока на основании информации о движении выбранного пространственного соседнего блока;
получение набора эталонных семплов, смежных с текущим блоком, посредством применения информации о движении для текущего блока; и
выполнение внутреннего прогнозирования текущего блока с помощью по меньшей мере линии эталонных семплов из набора сгенерированных эталонных семплов.
2. Способ по п. 1, отличающийся тем, что линия эталонных семплов является смежной с текущим блоком и расположена вдоль края текущего блока.
3. Способ по п. 1, отличающийся тем, что линия эталонных семплов расположена вдоль любого из следующего: правого края текущего блока, нижнего края текущего блока, левого края текущего блока или верхнего края текущего блока.
4. Способ по п. 1, в котором пространственный соседний блок представляет собой любой из: (1) еще не восстановленного во время прогнозирования текущего блока, или (2) восстановленного после текущего блока в соответствии с известным порядком восстановления блока.
5. Способ по п. 1, в котором выполнение внутреннего прогнозирования текущего блока дополнительно включает в себя применение другой линии эталонных семплов,
причем эталонные семплы другой линии выбраны из любого количества уже восстановленных блоков, смежных с текущим блоком.
6. Способ по п. 1, в котором выполнение внутреннего прогнозирования текущего блока дополнительно включает в себя применение другой линии эталонных семплов,
причем эталонные семплы другой линии генерируют с применением информации о движении другого пространственного соседнего блока, смежного с текущим блоком, и
причем другой пространственный соседний блок отличается от пространственного соседнего блока.
7. Способ по п. 1, в котором выполнение внутреннего прогнозирования текущего блока дополнительно включает в себя применение линии эталонных семплов для генерирования семплов прогнозирования для текущего блока в соответствии с любым из следующего: режимом внутрипланарного прогнозирования, режимом внутреннего прогнозирования DC или режимом направленного внутреннего прогнозирования.
8. Способ по п. 1, в котором выполнение внутреннего прогнозирования текущего блока включает в себя генерацию внутреннего прогнозирования текущего блока, который объединен с сигналом прогнозирования в соответствии с взаимным и внутренним комбинированным режимом объединения.
9. Способ по п. 1, в котором внутреннее прогнозирование текущего блока выполняют в любом из следующего: (1) видеокодере, причем текущий блок является частью кодируемого изображения, или (2) видеодекодере, причем текущий блок является частью декодируемого изображения.
10. Устройство для кодирования видеосигналов, содержащее схему, включающую в себя передатчик, приемник, кодер, декодер, процессор и запоминающее устройство, выполненное с возможностью:
выбора пространственного соседнего блока, который имеет информацию о движении для прогнозирования;
определения информации о движении для текущего блока на основании информации о движении выбранного пространственного соседнего блока;
получения набора эталонных семплов, смежных с текущим блоком, посредством применения информации о движении для текущего блока; и
выполнения внутреннего прогнозирования текущего блока с помощью по меньшей мере линии эталонных семплов из набора сгенерированных эталонных семплов.
11. Устройство по п. 10, в котором линия эталонных семплов является смежной с текущим блоком и расположена вдоль края текущего блока.
12. Устройство по п. 10, в котором линия эталонных семплов расположена вдоль любого из: правого края текущего блока, нижнего края текущего блока, левого края текущего блока или верхнего края текущего блока.
13. Устройство по п. 10, в котором пространственный соседний блок представляет собой любой из: (1) еще не восстановленного во время прогнозирования текущего блока, или (2) восстановленного после текущего блока в соответствии с известным порядком восстановления блока.
14. Устройство по п. 10, в котором выполнение внутреннего прогнозирования текущего блока дополнительно включает в себя применение другой линии эталонных семплов, и
причем эталонные семплы другой линии выбраны из любого количества уже восстановленных блоков, смежных с текущим блоком.
15. Устройство по п. 10, в котором выполнение внутреннего прогнозирования текущего блока дополнительно включает в себя применение другой линии эталонных семплов,
причем эталонные семплы другой линии генерируют с применением информации о движении другого пространственного соседнего блока, смежного с текущим блоком, и
причем другой пространственный соседний блок отличается от пространственного соседнего блока.
16. Устройство по п. 10, в котором линия эталонных семплов представляет собой любую из: верхней опорной линии, нижней опорной линии, левой опорной линии или правой опорной линии.
17. Устройство по п. 10, в котором линию эталонных семплов определяют в соответствии с любым из пикселя-кандидата или информации о движении, связанной с пикселем-кандидатом.
18. Устройство по п. 17, в котором пиксель-кандидат выбран из одного или более невосстановленных соседних блоков.
19. Устройство по п. 10, в котором пространственный соседний блок или соответствующий блок пространственного соседнего блока совмещенного изображения представляет собой любой из CU или подблока CU, и
причем каждый из CU или подблока CU имеет соответствующие высоту и ширину пикселей.
20. Устройство по п. 19, в котором CU представляет собой внутренний CU, а подблок CU представляет собой внутренний подблок CU.
21. Способ декодирования видеосигналов, включающий:
выбор пространственного соседнего блока, который имеет информацию о движении, для прогнозирования;
определение информации о движении для текущего блока на основании информации о движении выбранного пространственного соседнего блока;
получение набора эталонных семплов, смежных с текущим блоком, посредством применения информации о движении для текущего блока; и
выполнение внутреннего прогнозирования текущего блока с помощью по меньшей мере линии эталонных семплов из набора сгенерированных эталонных семплов.
22. Устройство для декодирования видеосигналов, содержащее схему, включающую в себя передатчик, приемник, кодер, декодер, процессор и запоминающее устройство, выполненное с возможностью:
выбора пространственного соседнего блока, который имеет информацию о движении для прогнозирования;
определения информации о движении для текущего блока на основании информации о движении выбранного пространственного соседнего блока;
получения набора эталонных семплов, смежных с текущим блоком, посредством применения информации о движении для текущего блока; и
выполнения внутреннего прогнозирования текущего блока с помощью по меньшей мере линии эталонных семплов из набора сгенерированных эталонных семплов.
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| IWAMURA S et al | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| СПОСОБ ВНУТРЕННЕГО ПРЕДСКАЗАНИЯ И КОДЕР И ДЕКОДЕР, ИСПОЛЬЗУЮЩИЕ ЕГО | 2012 |
|
RU2627110C2 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |

