Изобретение относится к области волоконно-оптических измерительных приборов, в частности, к датчикам динамического измерения скорости, веса и расстояния между колесами транспортных средств и может быть использовано для измерения нагрузки на колеса и оси транспортных средств в движении, а также скорости и габаритных параметров. На основании указанных измерений может вычисляться суммарный вес и габаритные параметры транспортного средства.
Известен датчик измерения скорости и расстояния между колесами транспортных средств, движущихся по одной полосе [M. Fajkus, M. Fridrich, J. Nedoma, R. Kahankova, R. Martinek, E. Bednár, J. Kolarik. PDMS-FBG Based Fiber Optic System for Traffic Monitoring in Urban Areas. IEEE Access. PP. 1-1. 10.1109/ACCESS.2020.3006985], в котором чувствительный элемент (ЧЭ) представляет подложку с размерами 60×30×7 мм из полимерного материала PDMS, внутри которого располагается одна волоконная брэгговская решетка (ВБР) (центральная длина волны брэгговского резонанса 1548,388 нм, коэффициент отражения 93,3%, ширина спектра (полная ширина на полувысоте, FWHM) 198 пм, датчик, основанный на системе из пяти ЧЭ с ВБР, инкапсулированных в полидиметилсилоксановый полимер, установлен в дорожное полотно. Одномодовые оптические волокна с записанными ВБР устанавливаются в полидиметилсилоксановый полимер для герметизации и защиты ВБР от негативных воздействий окружающей среды.
Недостатками вышеописанного ЧЭ является зависимость результата от влияния внешних факторов, таких как неравномерное распределение дорожного покрытия, изменение температуры и давления, вибрации, дорожные работы, спектральная схема опроса, так как для достижения высокой точности при такой методике опроса существует необходимость в дорогостоящем и требовательном к условиям обслуживания оборудовании, и возможность получить информацию только о скорости и количестве транспортных средств, а не о весе проезжающего автомобиля.
Известен датчик измерения скорости, веса и расстояния между колесами транспортного средства в движении [S. Alamandala, K. Putha, Sai Prasad R.L.N., Rathish Kumar P., FBG Sensing system to Study the Bridge Weigh-in-Motion for Measuring the Vehicle parameters. 3rd International Conference on Microwave and Photonics (ICMAP 2018), 9-11 February, 2018], выбранный в качестве прототипа предлагаемого устройства, в котором ЧЭ датчика динамического измерения скорости, веса и расстояния между колесами транспортного средства состоит из двух оптических волокон, в каждом из которых индуцирована ВБР (центральная длина волны брэгговского резонанса ВБР1 – 1552,004 нм, центральная длина волны брэгговского резонанса ВБР2 – 1543,887 нм), расположенных на расстоянии 100 см друг от друга.
Недостатками данного ЧЭ является зависимость результата от влияния внешних факторов, таких как неравномерное распределение дорожного покрытия, изменение температуры и давления, вибрации, дорожные работы, а также спектральная схема опроса, так как для достижения высокой точности при такой методике опроса существует необходимость в дорогостоящем и требовательном к условиям обслуживания оборудовании.
Известен способ динамического измерения веса, скорости и расстояния между колесами транспортных средств (патент US10861328B2, МПК G08G1/02, G08G1/052, дата публ. 08.12.2020). Способ включает установку нескольких различных датчиков внутрь или на дорожное полотно, по которому движется транспортное средство, облучение датчиков широкополосным источником излучения, оптический сигнал с датчиков преобразуется в электрический сигнал, содержащий информацию об амплитуде, частоте и фазе. Электрический сигнал передается в электронный процессор, который обрабатывает его для определения параметров деформации, вибрации и температуры, которые, будучи разрешены во времени, могут быть преобразованы в информацию о скорости, весе и расстоянии между колесами транспортных средств. Датчики измеряют частоту, амплитуду или фазу сигналов механических сил, создаваемых движением транспортного средства, преобразовывают оптический сигнал в электрический сигнал, который обрабатывается специальными алгоритмами, генерирующими информацию о весе по осям, весе на колесо, общем весе и скорости с помощью программного обеспечения.
Недостатком данного способа является измерение частоты, амплитуды или фазы сигналов от нескольких датчиков, что приводит к необходимости использовать несколько датчиков для компенсации внешних параметров.
Известен способ измерения скорости, веса и расстояния между колесами транспортного средства в движении волоконно-оптическим датчиком, который включает установку в дорожное полотно ЧЭ на основе двух ВБР [статья S. Alamandala, K. Putha, Sai Prasad R.L.N., Rathish Kumar P., FBG Sensing system to Study the Bridge Weigh-in-Motion for Measuring the Vehicle parameters. 3rd International Conference on Microwave and Photonics (ICMAP 2018), 9-11 February, 2018], облучение ЧЭ оптическим излучением широкополосного источника излучения и регистрацию полученного сигнала, выбранный в качестве прототипа для предлагаемого способа. Данный способ основывается на спектральном опросе двух ВБР. При проведении испытаний исследуемого объекта ВБР1 и ВБР2 подвергаются физическому воздействию поочередно, в момент проезда транспортного средства у каждой из ВБР изменяется сдвиг длины волны брэгговского резонанса. Измерение параметров, таких как вес (нагрузка), скорость и расстояние между колесами (по длине) можно измерить по временному отклику этих двух ВБР. При сохранении постоянного расстояния между двумя ВБР разница во времени между сдвигами длины волны и измеренное значение сдвига длины волны брэгговского резонанса позволяют определить вес, скорость и расстояние между колесами транспортного средства соответственно.
Недостатками вышеописанного способа при использовании его для измерения веса, скорости и расстояния между колесами транспортного средства является отсутствие защиты системы от внешних параметров, таких как температура, давление, вибрации, а также спектральная методика опроса, которая приводит к необходимости эксплуатации специализированного оборудования для анализа спектральной составляющей измеряемого сигнала. Помимо сложности и дороговизны таких устройств, они обладают более низкой скоростью измерения сигнала, по сравнению с амплитудным и интерферометрическим методами опроса.
Предлагаемый чувствительный элемент и способ динамического измерения скорости, веса, расстояния между колесами транспортных средств позволяют решить задачу упрощения конструкции ЧЭ за счет конструкции взаимного расположения подложки с ВБР и подложки с ЧВБР в непосредственной близости относительно друг друга, а также увеличения точности за счет увеличения диапазона динамического измерения сигнала и скорости измерений, посредством измерения изменения амплитудной характеристики отраженной оптической мощности.
Заявляемые ЧЭ и способ измерения обеспечивают переход от методики опроса, основанной на регистрации сдвига длины волны брегговского резонанса, к методике опроса, которая основана на измерении изменения амплитуды, отраженной от ЧЭ мощности излучения и, как следствие, к упрощению схемы опроса, поскольку отсутствует необходимость использовать дорогостоящее и требовательное к условиям эксплуатации устройств опроса, основанных на спектральной методике опроса, в пользу амплитудных устройств.
Поставленная задача решается следующим образом.
Чувствительный элемент (ЧЭ) волоконно-оптического датчика для динамического измерения скорости, веса и расстояния между колесами транспортных средств представляет собой не менее двух, разнесенных между собой оптических волокон, каждое из которых содержит, по крайней мере, одну индуцированную волоконную брэгговскую решетку (ВБР), оптические волокна с ВБР разнесены на расстояние не менее 10 мм друг от друга, а участки оптических волокон с индуцированными ВБР инкапсулированы в упругодеформированную подложку, ЧЭ дополнительно содержит не менее одного оптического волокна, по крайней мере, с одной индуцированной чирпированной волоконной брэгговской решеткой (ЧВБР), причем, участок оптического волокна с ЧВБР инкапсулирован в дополнительную упругодеформируемую подложку, которая изолирована от воздействия механической нагрузки транспортного средства, при этом подложка с ЧВБР расположена на расстоянии не менее 5 мм от подложки с ВБР.
Способ динамического измерения скорости, веса, расстояния между колесами транспортных средств волоконно-оптическим датчиком включает установку заявляемого чувствительного элемента (ЧЭ) волоконно-оптического датчика в дорожное полото, по которому движется исследуемый объект транспортного средства, облучение ЧЭ оптическим излучением широкополосного источника излучения, регистрацию амплитуды отраженной оптической мощности полученного сигнала и времени, соответствующего изменению значения амплитуды полученного сигнала, по зарегистрированному значению амплитуды, используя предварительно построенную калибровочную зависимость амплитуды отраженной оптической мощности от массы объекта, судят об искомом весе, а используя предварительно построенную экспериментальную зависимость амплитуды отраженной оптической мощности от времени, соответствующего изменению значения амплитуды полученного сигнала, при динамическом взвешивании груза, определяют время между пиками зарегистрированной отраженной оптической мощности от каждой из инкапсулированной в упругодеформированную подложку ВБР, при проезде по ним исследуемого объекта, по которому рассчитывают искомые скорость и расстояние между колесами транспортного средства.
Сущность заявляемого чувствительного элемента и способа динамического измерения скорости, веса и расстояния между колесами транспортных средств поясняется Фиг. 1 – Фиг. 6, где
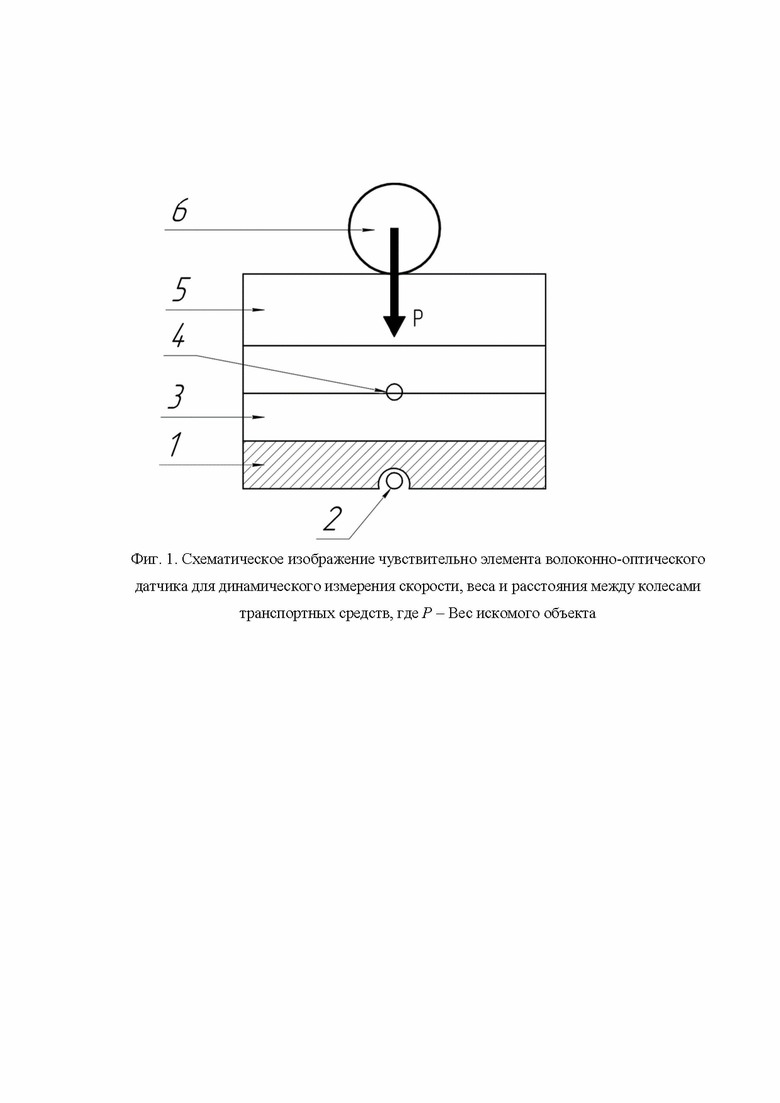
на Фиг. 1 приведено схематическое изображение чувствительного элемента волоконно-оптического датчика для динамического измерения скорости, веса и расстояния между колесами транспортных средств.
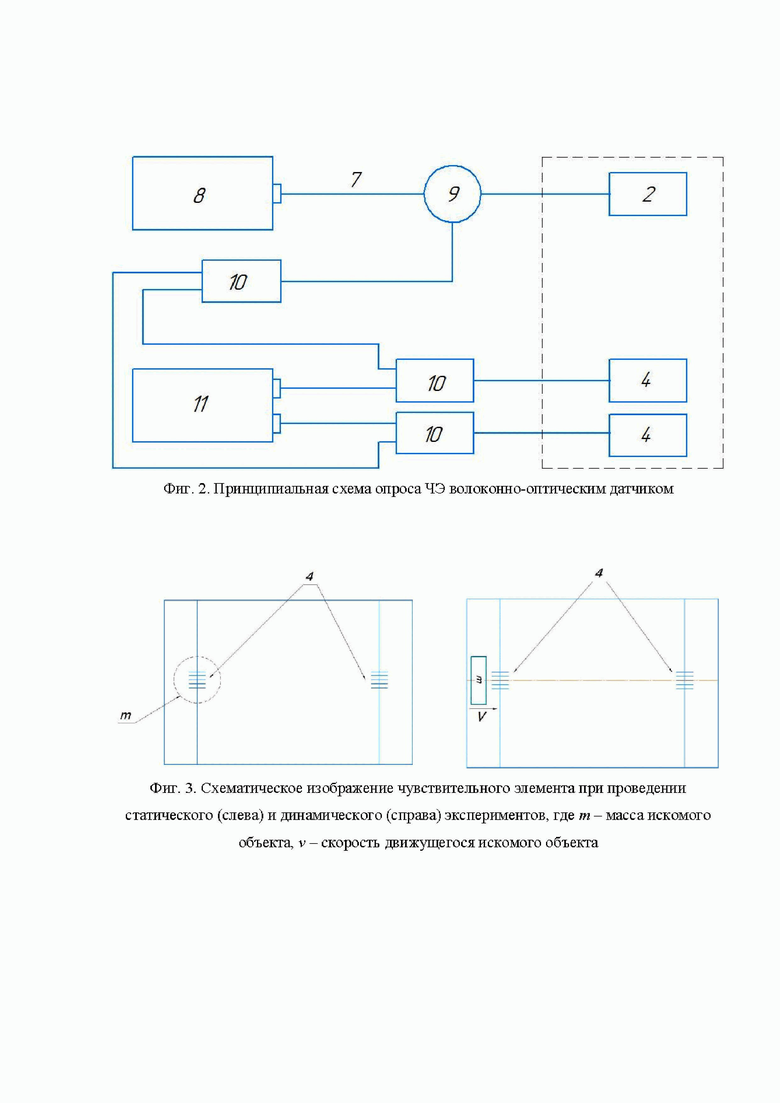
На Фиг. 2 приведена принципиальная схема опроса ЧЭ волоконно-оптическим датчиком.
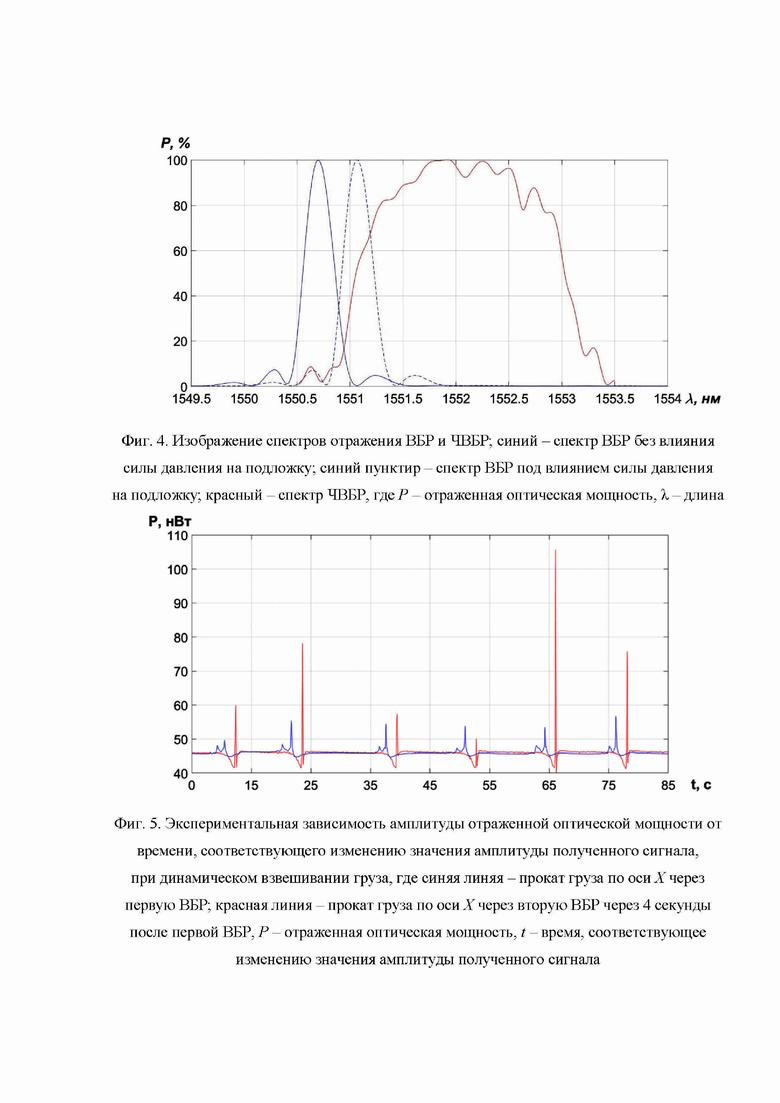
На Фиг. 3 приведено схематическое изображение чувствительного элемента при проведении статического и динамического экспериментов.
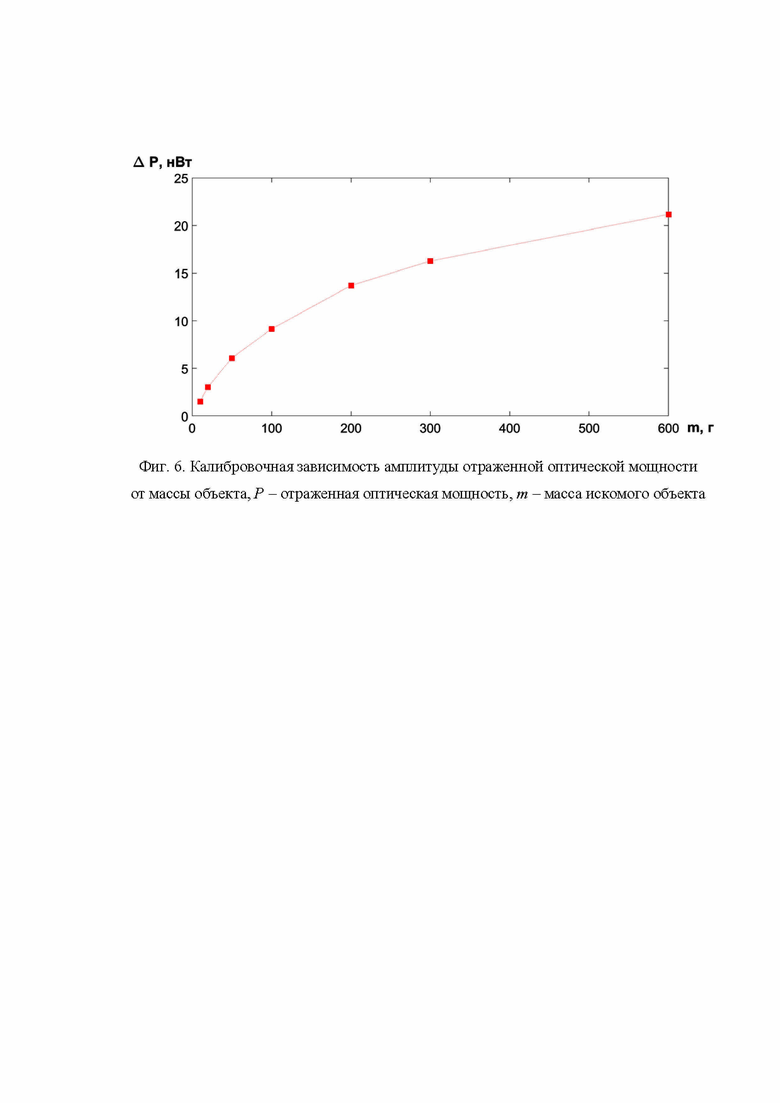
На Фиг. 4 приведены спектры отражения ВБР и ЧВБР.
На Фиг. 5 приведена экспериментальная зависимость амплитуды отраженной оптической мощности от времени, соответствующего изменению значения амплитуды полученного сигнала, при динамическом взвешивании груза.
На Фиг. 6 приведена калибровочная зависимость амплитуды отраженной оптической мощности от массы объекта.
При движении транспортных средств по дорожному полотну, в котором установлен ЧЭ волоконно-оптического датчика, механическое воздействие оказывается на ВБР, которые инкапсулированы в упругодеформируемый материал, при этом механического давления на ЧВБР не оказывается. Поскольку ВБР и ЧВБР располагаются на расстоянии, позволяющем получить минимальный градиент по температуре между ВБР и ЧВБР, и инкапсулированы в одинаковый материал, то изменение (смещение) центральной длины брэгговского резонанса относительно внешних параметров происходит для ВБР и ЧВБР примерно одинаково. Таким образом, ЧЭ волоконно-оптического датчика регистрирует только искомую величину – изменение оптической мощности.
В ЧЭ волоконно-оптического датчика динамического измерения скорости, веса и расстояния между колесами транспортных средств используются оптические волокна с индуцированными ВБР, которые разнесены на расстояние не менее 10 мм друг от друга, для того чтобы избежать наложения пиков центральной длины волны брэгговского резонанса при проезде транспортных средств по упругодеформируемым подложкам с ВБР.
Участки оптических волокон с ВБР инкапсулированы в упругодеформированную подложку и такой тип материала выбран для того, чтобы после прекращения действия внешней силы (нагрузки), материал, в который инкапсулирована ВБР, полностью восстановил первоначальные размеры и форму.
Чувствительный элемент дополнительно содержит не менее одного оптического волокна, по крайней мере, с одной индуцированной чирпированной волоконной брэгговской решеткой (ЧВБР), для того, чтобы при приложении нагрузки, центральная длина волны брэгговского резонанса ВБР сдвигалась в длинноволновую область и попадала на резко возрастающую область спектрально отклика ЧВБР, что приводит к усилению амплитуды регистрируемой отраженной оптической мощности.
Участок оптического волокна с ЧВБР инкапсулирован в дополнительную упругодеформируемую подложку для того, чтобы после прекращения действия внешней силы (нагрузки), материал, в который инкапсулирована ЧВБР, полностью восстановил первоначальные размеры и форму, при этом, подложка с ЧВБР изолирована от воздействия механической нагрузки транспортного средства, чтобы спектр ЧВБР оставался неизменным при проезде транспортного средства, поскольку спектр ВБР при приложении нагрузки будет смещаться в длинноволновую область и попадать на резко возрастающий профиль спектра ЧВБР, измеряемая отраженная мощность будет увеличиваться и показывать измеряемую нагрузку транспортного средства.
Подложка с ЧВБР расположена на расстоянии не менее 5 мм от подложки с ВБР, что обусловлено геометрическими размерами оптических волокон, толщиной слоев упругодеформируемых и неупрогодеформируемого подложек, также данное близкое расположение обеспечивает минимальный градиент по температуре между подложкой с ВБР и подложкой с ЧВБР.
Способ регистрирует изменение оптической мощности, по которому судят о скорости, весе и расстоянии между колесами транспортных средств следующим образом.
При приложении силы ВБР растягивается, что приводит к сдвигу центральной длины волны брэгговского резонанса в длинноволновую области и попаданию на область спектрального отклика ЧВБР. Вследствие этого увеличивается отраженная оптическая мощность, которая фиксируется приемником излучения.
На Фиг. 3 представлено схематическое изображение подложки, которая использовалась для проведения экспериментов статического и динамического взвешиваний. ВБР, индуцированные в оптическое волокно, расположены на зафиксированном расстоянии друг от друга и закреплены в упругодеформированной подложке, как показано на Фиг. 1. При проведении измерений статического взвешивания (Фиг. 3 (а)) исследуемый объект устанавливается на одну из ВБР в течение некоторого времени с заданным интервалом, в результате чего была сформирована калибровочная зависимость амплитуды отраженной оптической мощности от массы объекта (Фиг. 6). Для проведения измерений по динамическому взвешиванию исследуемый объект прокатывается по оси, показанной на Фиг. 3 (б) оранжевой линией, в результате чего была сформирована экспериментальная зависимость амплитуды отраженной оптической мощности от времени, соответствующего изменению значения амплитуды полученного сигнала, при динамическом взвешивании груза (Фиг. 5).
На Фиг. 4 представлен спектр отражения ЧЭ, по которому центральная длина волны брэгговского резонанса ВБР (синий) сдвигается в длинноволновую область и попадает на резко возрастающий уровень отраженного сигнала ЧВБР (красный). При сдвиге центральной длины волны брэгговского резонанса ВБР в длинноволновую область и попадании на наклонный профиль показателя преломления ЧВБР увеличивается общее значение отраженной оптической мощности, которое является искомой измеряемой величиной, выражающей степень приложенной силы воздействия исследуемого объекта движения.
На Фиг. 5 приведена экспериментальная зависимость амплитуды отраженной оптической мощности от времени, соответствующего изменению значения амплитуды полученного сигнала, при динамическом взвешивании груза. Синяя кривая соответствует отклику первой ВБР, красная кривая соответствует отклику второй ВБР, расположенной на той же оси. По результатам экспериментальной зависимости определяют время, соответствующее значениям центральной длины волны брэгговского резонанса каждой из ВБР, значение данного времени используют для расчёта искомой скорости и расстояния между колесами транспортного средства.
На Фиг. 6 показана калибровочная зависимость амплитуды отраженной оптической мощности от массы объекта. Из Фиг. 6. следует, что чем больше величина приложенной массы, тем выше значение отраженной оптической мощности.
Для определения веса объекта измеряется изменение оптической мощности, которое возникает при приложении к ВБР силы, вызванной весом движущегося объекта. Экспериментально установлено, что амплитуда измеренного сигнала соответствует определенному весу.
Для определения динамического диапазона значений амплитуды сигналов и соответствующего ему диапазона значений веса предлагается использовать моделирование в программной среде COMSOL Multiphysics. С помощью данного способа рассчитывается удлинение волновода, вызванное приложенной силой воздействующего объекта. Затем рассчитывается вклад механического воздействия на периодическую структуру и получается зависимость изменения центральной длины волны от прикладываемого веса. Далее приводятся в соответствие следующие параметры: амплитуда сигнала, сдвиг центральной длины волны и значение приложенного веса.
Вклад механического воздействия на периодическую структуру может быть рассчитан по следующей формуле:

где  коэффициент тензометрической чувствительности (
коэффициент тензометрической чувствительности ( для стандартного одномодового оптического волокна,
для стандартного одномодового оптического волокна,  относительное удлинение световода, м.
относительное удлинение световода, м.
Для функции, отвечающей зависимости

где m – масса искомого объекта, а P1, P2, Pn – изменение регистрируемой оптической мощности.
Таким образом, получаемый сигнал изменения регистрируемой оптической мощности, соответствует сдвигу длины волны брэгговского резонанса, который путем математических алгоритмов, пересчитывается в искомую величину веса объекта (табл. 1).
Для построения калибровочной зависимости амплитуды отраженной оптической мощности от массы объекта проведены следующие измерения.
Для определения зависимость амплитуды отраженной оптической мощности от массы объекта, на одну из ВБР оказывалось воздействие объектом весом в диапазоне от 10 до 600 г (Фиг. 6).
По итогам эксперимента были получены данные, представленные в Таблице 1. Полученные данные представлены в виде зависимости изменения мощности оптического сигнала от приложенной массы искомого объекта.
Таблица 1 – Математический пересчет изменения оптической мощности в центральную длину волны брэгговского резонанса и искомую массу объекта
При воздействии нагрузки на ЧЭ системы оптическое волокно с индуцированной ВБР растягивается/деформируется, из-за чего происходит сдвиг центральной длины волны брэгговского резонанса в длинноволновую область и увеличение оптической мощности, детектируемой приемником, так как спектр отражения ВБР попадает на спектр отражения ЧВБР. Таким образом, амплитуда сигнала зависит от величины сдвига центральной длины волны брэгговского резонанса.
По предварительно полученным экспериментальным данным, было определено, что зависимость сдвига центральной длины волны брэгговского резонанса от прикладываемой нагрузки и, соответственно, зависимость амплитуды сигнала от прикладываемой нагрузки – линейны с незначительной ошибкой.
Полученные значения массы (табл. 1) по значениям входных переменных амплитуды сигнала является задачей регрессии, для определения которой используется метод наименьших квадратов.
Задача определения массы по значениям входных переменных амплитуды сигнала является задачей регрессии. В качестве основной модели в этом случае рассматривается следующая линейная модель:

где числовые параметры,
числовые параметры,  неслучайный параметр амплитуды сигнала, значения которого наблюдаются (известны).
неслучайный параметр амплитуды сигнала, значения которого наблюдаются (известны).
Для поиска коэффициентов регрессии используется метод наименьших квадратов.




По полученным данным, представленным в Таблице 1 были рассчитаны коэффициенты для линейной регрессии  и
и  . Полученная зависимость амплитуды отраженной оптической мощности от массы объекта для конкретного экспериментального исследования в соответствии с рассчитанными коэффициентами и линейной моделью (3) выглядит так:
. Полученная зависимость амплитуды отраженной оптической мощности от массы объекта для конкретного экспериментального исследования в соответствии с рассчитанными коэффициентами и линейной моделью (3) выглядит так:

Для того, чтобы доказать линейную зависимость предлагается оценить значение  статистики. Данная величина является безразмерной и лежит между нулем и единицей. Рассчитываем по следующей формуле:
статистики. Данная величина является безразмерной и лежит между нулем и единицей. Рассчитываем по следующей формуле:

Так как близок к единице, значит зависимость амплитуды отраженной оптической мощности от массы объекта линейна с незначительной ошибкой.
Определение скорости объекта производится на основе знания расстояния между ВБР и измеренного значения времени, соответствующего изменению значения амплитуды полученного сигнала между двумя пиками, которые соответствуют откликам каждой из ВБР, сообразно формуле:

где v – скорость движущегося объекта, S – зафиксированное значение расстояния между первой и второй ВБР, входящих в состав ЧЭ, через которые проезжает исследуемый объект; t – время, соответствующее изменению значения амплитуды полученного сигнала между двумя пиками, которые соответствуют откликам первой и второй ВБР,  время, соответствующее изменению значения амплитуды полученного сигнала при движении объекта по ЧЭ по первой и второй ВБР соответственно.
время, соответствующее изменению значения амплитуды полученного сигнала при движении объекта по ЧЭ по первой и второй ВБР соответственно.
Для автоматического аналого-цифрового преобразования получаемых в ходе эксперимента сигналов и их дальнейшей обработки возможно использование программного обеспечения.
Определение расстояния между колесами производится на основе знания расстояния между ВБР и измеренному времени, соответствующего изменению значения амплитуды полученного сигнала между двумя пиками, которые соответствуют откликам каждой из ВБР, сообразно формуле:

где L – расстояние между осями транспортного средства, S – расстояние между ближайшими решетками, через которые проезжает транспортное средство, v – скорость движущегося объекта, время, соответствующее изменению значения амплитуды полученного сигнала при движении объекта первой осью по первой и второй ВБР соответственно, t3 – время, соответствующее изменению значения амплитуды полученного сигнала при движении объекта второй осью по первой ВБР.
Для проведения измерений по динамическому взвешиванию исследуемый объект прокатывается по оси, показанной на Фиг. 3 (б) оранжевой линией. По результатам данного эксперимента построена экспериментальная зависимость амплитуды отраженной оптической мощности от времени, соответствующего изменению значения амплитуды полученного сигнала, при динамическом взвешивании груза (Фиг. 5).
Таким образом, по изменению сигнала оптической мощности, регистрируемым ЧЭ, можно судить об искомых величинах: скорости, весе и расстоянии между колесами транспортного средства.
Чувствительный элемент (Фиг. 1) включает неупругодеформируемый слой подложки 1, который не чувствителен к приложенной силе давления объекта, оптическое волокно с индуцированной ЧВБР 2, упругодеформируемый слой подложки, чувствительный к приложенной силе давления объекта 3, оптическое волокно с индуцированной ВБР 4, упругодеформируемый слой подложки, чувствительный к приложенной силе давления объекта 5, исследуемый объект 6. На Фиг. 1 ЧВБР 2 и ВБР 4 индуцированы в сердцевину оптического волокна 7.
Оптическое волокно 7 с индуцированной ВБР 4 закреплено на слое 3, который испытывает на себе механическое воздействие силы веса исследуемого объекта 6, а оптическое волокно 7, со сформированной в нем ЧВБР 2, закреплено в слое 1, не подвергается влиянию механического воздействия силы веса исследуемого объекта 6.
На Фиг. 2 приведена принципиальная схема опроса ЧЭ волоконно-оптическим датчиком. Датчик включает широкополосный источник излучения 8, излучение которого по оптическому волокну 7 попадает на циркулятор 9, где разделяется на две части: первая часть излучения попадает на чувствительный элемент ЧВБР 2; вторая часть излучения проходит через Y-ответвитель 10 к чувствительному элементу ВБР 4, измерение отраженной оптической мощности осуществляется с помощью двухканального измерителя мощности 11.
Заявляемый способ осуществляется следующим образом. Излучение широкополосного источника 8 попадает на циркулятор 9, где разделяется на две части: первая часть излучения попадает на ЧЭ ЧВБР 2; вторая часть излучения проходит через Y-ответвитель 10 к ЧЭ ВБР 4. Отраженное от ВБР 4 излучение попадает через Y-ответвитель 10 на двухканальный измеритель мощности 11, с помощью которого фиксируется увеличение отраженной оптической мощности, которое появляется при сдвиге центральной длины волны брэгговского резонанса ВБР 4 в длинноволновую область и попадании на резко возрастающую область спектрального отклика ЧВБР 2.
В качестве конкретного примера выполнения предлагается чувствительный элемент динамического измерения скорости, веса и расстояния между колесами транспортных средств, выполненный на основе двух оптических волокон с индуцированными ВБР, с длиной волны брэгговского резонанса 1559,941 нм, которые располагаются на расстоянии 220 мм друг от друга (Фиг. 3).
Запись ВБР и ЧВБР в оптическом волокне проводилась с помощью лазерной системы MOPA CL-7550 (OptoSystems, Россия) и интерферометра Тальбота.
ЧЭ закрепляется на оснастке, которая выполнена из полимерного материала. В нашем случае, как показано на Фиг. 2, нижний слой подложки 1 состоит из неупругодеформируемого материала, например, из металла (в частности, алюминий), верхние слои подложки 3 и 5 состоят из оптически прозрачной гельсилоксановой композиции СУРЭЛ-СЛ1, которая затвердевает при комнатной температуре с образованием мягкой эластичной гелеобразной массы, толщина слоев 5 мм.
Заявляемый ЧЭ и способ динамического измерения скорости, веса и расстояния между колесами транспортных средств обеспечивает следующие преимущества.
Использование амплитудного метода опроса ЧЭ приводит к использованию менее требовательных к условиям эксплуатации и более доступных устройств – измерителей оптической мощности, в отличие от спектральной методики опроса, где требуются спектральные устройства опроса, имеющие высокие требования к условиям эксплуатации и высокую стоимость. Также, конструкция систем амплитудного опроса относительно проста и не требует высоких затрат как со стороны используемого оборудования, так и со стороны алгоритмов измерения, что и определяет данный метод как простое, высокоскоростное решение. Амплитудные датчики обладают скоростью опроса на порядки, превышающей скорость работы устройств, основанных на спектральной методике, и сравнимы со скоростью работы интерферометрических датчиков.
Применение пары ВБР-ЧВБР приводит к термокомпенсации системы для измерения скорости и веса транспортных средств. Ввиду того, что температурное влияние происходит на всю опрашиваемую структуру целиком и оказывает воздействие на спектральную селективность всего ЧЭ, относительное смещение спектральных характеристик чувствительной части ВБР от ЧВБР неизменно. Данный факт обуславливает отсутствие необходимости в обеспечении дополнительного механизма температурной компенсации.
Применение более двух ВБР приводит к увеличению диапазона измеряемого сигнала. Увеличение диапазона повышает точность измерений заявляемого устройства, а также позволяет снизить требования к используемому измерительному оборудованию.
Кроме того, данная система для измерения скорости и веса транспортных средств обладает следующими преимуществами волоконно-оптических устройств: электромагнитной пассивностью, высокой сопротивляемостью воздействию окружающей среды, малыми массогабаритными параметрами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Чувствительный элемент волоконно-оптического тензометрического датчика для измерения продольного механического натяжения и способ измерения продольного механического натяжения объекта волоконно-оптическим тензометрическим датчиком | 2021 |
|
RU2771446C1 |
| Способ и волоконный чувствительный элемент для определения тепловых характеристик веществ (жидкостей и газов) | 2022 |
|
RU2804474C1 |
| Система измерения трёхмерного линейного и углового ускорения и перемещения объекта в пространстве с использованием волоконных брэгговских решеток | 2019 |
|
RU2716867C1 |
| СИСТЕМА НА ОСНОВЕ ВЫНУЖДЕННОГО РАССЕЯНИЯ МАНДЕЛЬШТАМА-БРИЛЛЮЭНА С МНОЖЕСТВОМ ВБР | 2010 |
|
RU2511066C2 |
| Способ измерения гидростатического давления и волоконно-оптический датчик гидростатического давления | 2023 |
|
RU2811364C1 |
| Способ формирования волоконной брэгговской решётки с фазовым сдвигом | 2018 |
|
RU2676191C1 |
| Способ пассивной компенсации температурной зависимости оптических параметров волоконной брэгговской решетки | 2022 |
|
RU2793155C1 |
| Способ формирования массива волоконных решеток Брэгга с различными длинами волн отражения | 2018 |
|
RU2690230C1 |
| Способ опроса сенсорных элементов волоконных брегговских решеток, основанный на использовании времяпролетного датчика расстояния | 2023 |
|
RU2819565C1 |
| ЦИФРОВОЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ | 2016 |
|
RU2674574C2 |
Изобретение относится к области волоконно-оптических измерительных приборов, в частности к датчикам динамического измерения параметров транспортных средств, и может быть использовано для измерения характеристик транспортных средств в движении. Устройство включает не менее двух разнесенных между собой оптических волокон, каждое из которых содержит по крайней мере одну индуцированную волоконную брэгговскую решетку (ВБР). Участки оптических волокон с ВБР инкапсулированы в упругодеформированную подложку, чувствительный элемент дополнительно содержит не менее одного оптического волокна по крайней мере с одной индуцированной чирпированной волоконной брэгговской решеткой (ЧВБР). Причем участок оптического волокна с ЧВБР инкапсулирован в дополнительную упругодеформируемую подложку, которая изолирована от воздействия механической нагрузки транспортного средства. Способ включает установку заявляемого чувствительного элемента (ЧЭ) волоконно-оптического датчика в дорожное полото, по которому движется исследуемый объект транспортного средства, облучение ЧЭ оптическим излучением широкополосного источника излучения, регистрацию амплитуды полученного сигнала и времени, соответствующего изменению значения амплитуды полученного сигнала, и регистрацию отраженной оптической мощности. Технический результат заключается в упрощении конструкции, повышении скорости и точности измерений. 2 н.п. ф-лы, 6 ил. 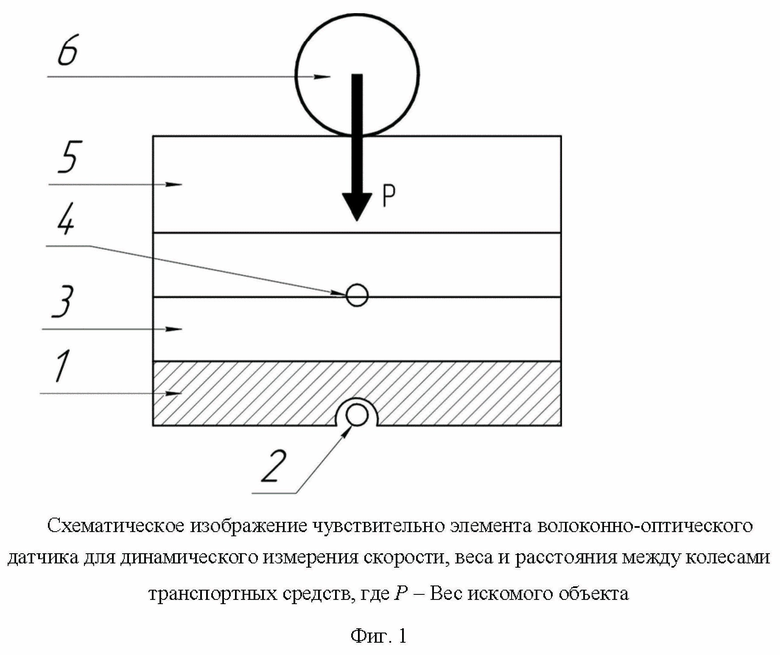
1. Чувствительный элемент волоконно-оптического датчика для динамического измерения скорости, веса, расстояния между колесами транспортных средств, включающий не менее двух разнесенных между собой оптических волокон, каждое из которых содержит по крайней мере одну индуцированную волоконную брэгговскую решетку (ВБР), отличающийся тем, что оптические волокна с ВБР разнесены на расстояние не менее 10 мм друг от друга, а участки оптических волокон с ВБР инкапсулированы в упругодеформированную подложку, чувствительный элемент дополнительно содержит не менее одного оптического волокна по крайней мере с одной индуцированной чирпированной волоконной брэгговской решеткой (ЧВБР), причем участок оптического волокна с ЧВБР инкапсулирован в дополнительную упругодеформируемую подложку, которая изолирована от воздействия механической нагрузки транспортного средства, при этом подложка с ЧВБР расположена на расстоянии не менее 5 мм от подложки с ВБР.
2. Способ динамического измерения скорости, веса и расстояния между колесами транспортных средств волоконно-оптическим датчиком, включающий установку чувствительного элемента (ЧЭ) волоконно-оптического датчика в дорожное полото, по которому движется исследуемый объект транспортного средства, облучение ЧЭ оптическим излучением широкополосного источника излучения, регистрацию амплитуды полученного сигнала и времени, соответствующего изменению значения амплитуды полученного сигнала, отличающийся тем, что в дорожное полотно устанавливают ЧЭ волоконно-оптического датчика по п.1, регистрируют отраженную оптическую мощность, по зарегистрированному значению амплитуды, используя предварительно построенную калибровочную зависимость амплитуды отраженной оптической мощности от массы объекта, судят об искомом весе, а используя предварительно построенную экспериментальную зависимость амплитуды отраженной оптической мощности от времени, соответствующего изменению значения амплитуды полученного сигнала, при динамическом взвешивании груза, определяют время между пиками зарегистрированной отраженной оптической мощности от каждой из инкапсулированной в упругодеформированную подложку ВБР, при проезде по ним исследуемого объекта, по которому рассчитывают искомые скорость и расстояние между колесами транспортного средства.
| S | |||
| Alamandala, K | |||
| Putha, Sai Prasad R.L.N., Rathish Kumar P., FBG Sensing system to Study the Bridge Weigh-in-Motion for Measuring the Vehicle parameters | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US 10861328 B2, 08.12.2020 | |||
| Способ формирования волоконной брэгговской решётки с фазовым сдвигом | 2018 |
|
RU2676191C1 |
| Чувствительный элемент волоконно-оптического тензометрического датчика для измерения продольного механического натяжения и способ измерения продольного механического натяжения объекта волоконно-оптическим тензометрическим датчиком | 2021 |
|
RU2771446C1 |
| CN 109029797 B, | |||

