Изобретение относятся к измерительной технике и предназначено для измерения трехмерного ускорения, вибрации и перемещения мерного грузика в герметичном вакуумированном корпусе. При установке устройства измерения на Брэгговских решетках на объект, оно реализует функцию измерения и оценки вибрации, ускорения и перемещения объекта в пространстве.
Известен акселерометр (Патент РФ №2441247, дата приоритета 24.05.2010), который относится к приборам измерения параметров движения летательных аппаратов, и может быть использовано при изготовлении прецизионных маятниковых компенсационных акселерометров.
Акселерометр содержит подвижную пластину - маятник на упругом подвесе. На маятнике закреплены катушки датчика момента, а на неподвижной части - магниты и полюсные наконечники, при этом к торцам магнитов крепятся вставки из пермаллоя. Между вставкой и основным магнитопроводом имеется круговой воздушный зазор. В основном (рабочем) зазоре, образованном магнитопроводом и полюсным наконечником, помещается катушка датчика момента. Зазор между маятником и неподвижными частями магнитопровода (боковые пластины) обеспечивается с помощью трех платиков (выступов) с каждой стороны опорного кольца центральной кварцевой пластины. В качестве демпфирующего газа используется гелий, а между упругим подвесом и магнитопроводом введены алюминиевые вставки.
Из уровня техники известны электромеханические акселерометры и гироскопы, выполненные по технологии микроэлектромеханических систем (МЭМС). Известно большое количество разнообразных схем микромеханических гироскопов (ММГ). Общим конструктивным признаком ММГ - вибрационных датчиков угловой скорости, является использование в них различных по конфигурации двухстепенных упругих подвесов чувствительного элемента (ЧЭ).
Принцип работы ММГ заключается в создании перемещения относительно корпуса знакопеременного поступательного либо вращательного движения ЧЭ по одной из степеней свободы и измерении перемещений по другой степени свободы, возникающих под действием кориолисовых сил или гироскопических моментов при наличии переносной угловой скорости корпуса. Этот принцип поясняется на примере ММГ с двухстепенным упругим подвесом и поступательными перемещениями ЧЭ. При наличии знакопеременной относительной линейной скорости V вдоль оси ОХ и переносной измеряемой угловой скорости вокруг оси OZ появляются знакопеременное ускорение Кориолиса и соответствующая ему сила вдоль оси ОY.
Недостатками указанного аналога являются невысокая точность и чувствительность измерений за счет восприимчивости к электромагнитным помехам.
Известны устройства - лазерные гироскопы, которые используют эффект Саньяка (например волоконно - оптический гироскоп (Патент РФ №2444704, дата публикации 10.03.2012): появление фазового сдвига встречных световых волн во вращающемся кольцевом интерферометре. В отличие от механического гироскопа, данный прибор не стремится сохранить начальное направление, а измеряет абсолютную угловую скорость, проинтегрировав которую можно получить значение угла, на который совершен поворот.Преимущества данного гироскопа - цифровой выходной сигнал, малое время готовности, отсутствие подвижных частей (в некоторых случаях).
Недостаткам лазерных гироскопов являются отсутствие возможности измерения углового ускорения по нескольким осям, а также изменение длины оптического пути под воздействием теплового расширения, давления и механических деформаций.
Целью предлагаемого изобретения является создание системы реализующей функцию измерения и оценки кориолисовых сил инерции посредством оценки вибрации, ускорения вращения и перемещения объекта в пространстве по трем осям Х,У,Z и устойчивого к электромагнитным помехам и датчика измерения содержащего чувствительную массу.
Техническим результатом изобретения является устойчивость к электромагнитным помехам при измерении линейного и углового ускорения объекта в пространстве по трем осям Х,У,Z, за счет чего достигается надежность и точность измерения.
Технический результат достигается за счет того, что система измерения трехмерного линейного и углового ускорения и перемещения объекта в пространстве с использованием волоконных брэгговских решеток содержит блок формирования широкополосного сигнала светового потока соединенный оптоволоконным световодом с первым портом оптического циркулятора, второй порт оптического циркулятора соединен оптоволоконным световодом с датчиком измерения, третий порт оптического циркулятора соединен оптоволоконным световодом со входом спектрометра, вход блока формирования широкополосного сигнала светового потока и выход спектрометра соединены с цифровым вычислительным устройством, при этом датчик измерения содержит герметичный корпус с входными и выходными отверстиями для оптоволоконного световода, внутри герметичного корпуса посредством оптоволоконного световода закреплен мерный грузик, причем оптоволоконный световод по меньшей мере пять раз проходит через корпус и мерный грузик, образуя по меньшей мере десять измерительных участков между корпусом и мерным грузиком, на каждом измерительном участке между корпусом и мерным грузиком оптоволоконный световод содержит в себе волоконную брэгговскую решетку, на последнем измерительном участке оптоволоконный световод закреплен на виброизолирующей площадке, которая в свою очередь закреплена на корпусе на расстоянии от мерного грузика.
Акселерометры широко используются во многих областях инженерной деятельности для измерения перемещений. Их реализуемый принцип действия - линейный генератор. Типичный акселерометр состоит из чувствительной массы, поддерживаемой пружиной (упругим подвесом), которая во многих случаях является самостоятельным чувствительным элементом, реализованным в устройстве в качестве измерительного элемента.
В качестве пружинных элементов в предлагаемом изобретении используются оптические волокна с использованием волоконной брэгговской решетки (ВБР) размещенные в герметичном корпусе представленного датчика измерения (оптическое волокно, проходит через отверстия в корпусе и в мерном грузике (чувствительной массе). Влияние температуры на измерения компенсировано путем применения ВБР в этом же волокне.
Сформированные в оптическом волокне ВБР являются оптическими фильтрами для набегающего широкополосного лазерного излучения в оптическом световоде, которые формируют оптоволоконный фотонный резонанс на определенной длине волны для каждой ВБР в соответствии с законом Брэгга - λВ=2(х neff - измеряемый сигнал отраженного светового потока. Отраженный сигнал каждой ВБР выделяет часть светового потока, созданного сверхлюминисцентным диодом широкополосного когерентного излучения светового потока - является предметом измерения оптического полезного сигнала светового потока при приложении к ВБР нагрузки от Кориолисовых сил из-за движения корпуса системы измерения трехмерного линейного и углового ускорения и перемещения, закрепленного на объекте в пространстве относительно мерного грузика, что приводит к смещению отраженной длины волны - δλВБР1…δλВБР9, закрепленных на оптическом оптоволоконном световоде волокне. Датчик температуры определяет ее значение в герметичном корпусе - δλВБР10.
Оптоволоконный ВБР датчик не меняет свои характеристики при измерении полезного сигнала - деформации в течение всего своего полного жизненного цикла.
Важной характеристикой ВБР датчик является скорость передачи оптического полезного сигнала по оптоволоконному волокну световода, которая в 1,5 раза меньше скорости света в вакууме. Практически не имеет ограничений на скорость проведения измерений в динамическом режиме при измерении полезного сигнала вибрации кроме ограничения технических возможностей измерительных приборов.
Оптоволоконные ВБР датчики измерительной системы могут располагаться за десятки километров от оптоволоконной измерительной системы (далее ОВИС). К одной ОВИС можно подключить десятки систем трехмерного ускорения, вибрации и перемещения, расположенных в различных агрегатах объекта.
Оптоволоконный датчик на ВБР обладает существенными преимуществом по сравнению с другими датчиками и системами измерения для их основы - высокой скоростью распространения полезного сигнала по оптическому световоду. Он не подвергается электромагнитным помехам, обладает высокой точностью измерения. Измеряемая деформация волоконным оптическим датчиком имеет линейную зависимость по отношению к измеряемой величине деформации датчика ВБР - линейное смещение длины волны оптоволоконного резонанса - δλВ.
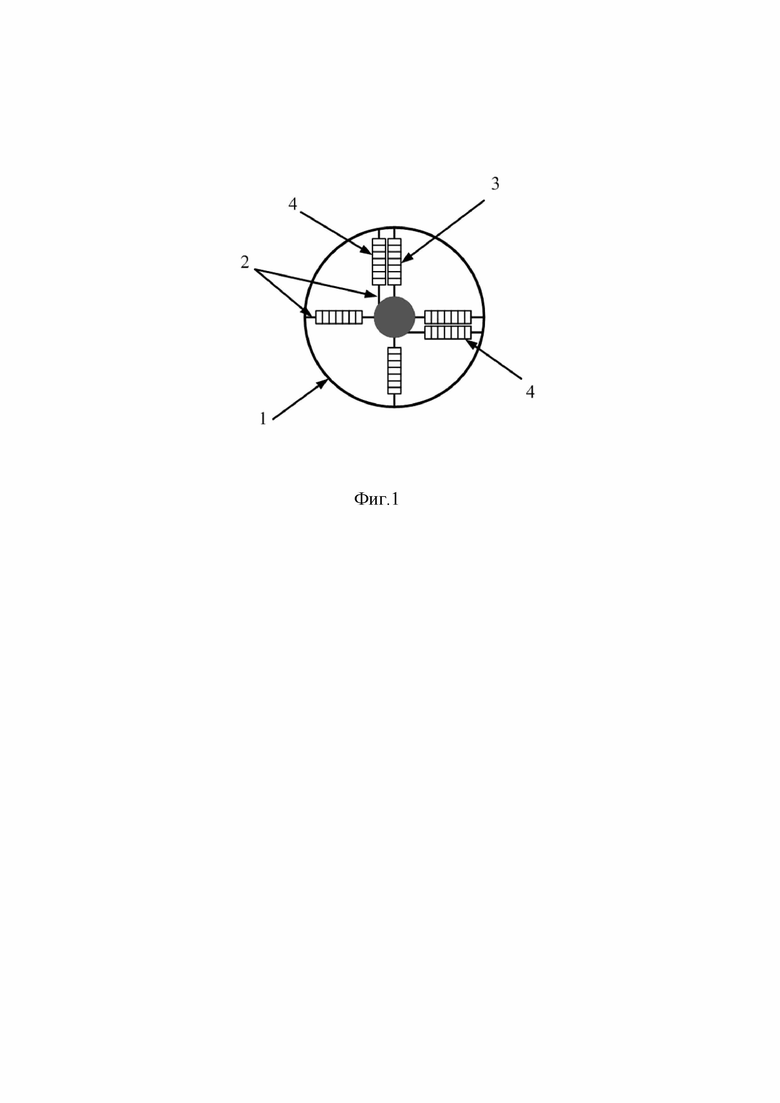
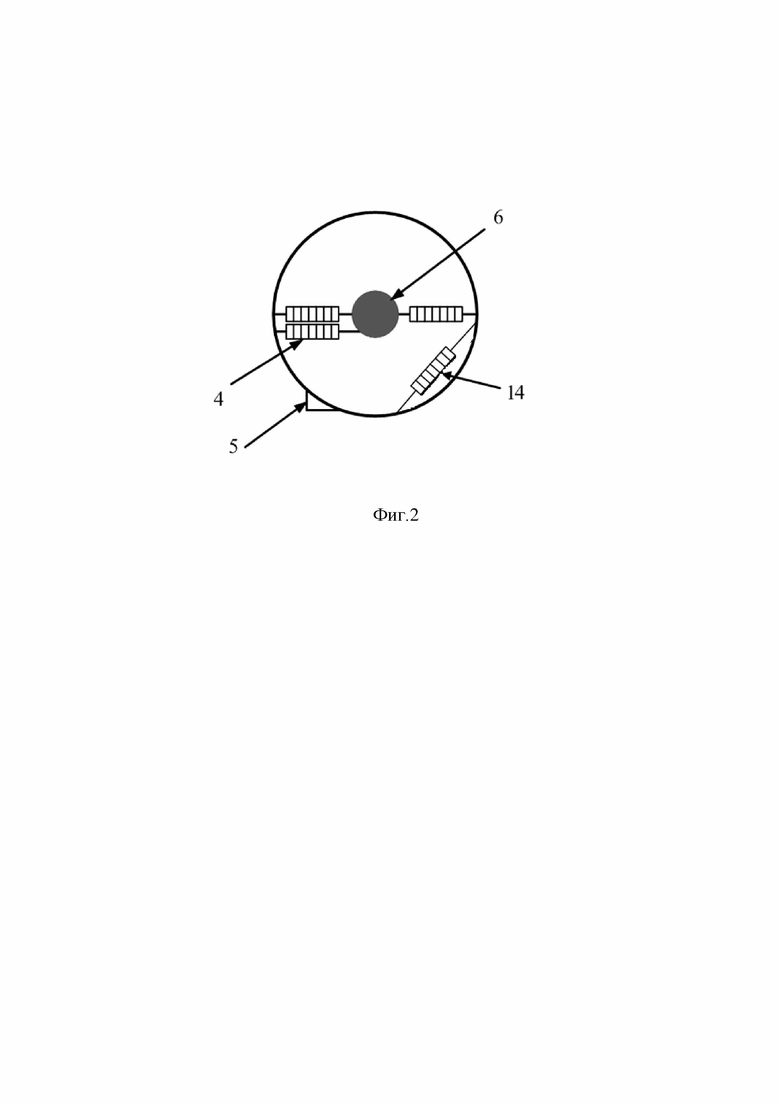
Техническая сущность предполагаемого изобретения поясняется графическими изображениями. На фиг. 1 изображен датчик измерения в продольном сечении, на фиг. 2 датчик измерения в поперечном сечении, на фиг. 3 блок схема системы измерения.
Система содержит:
1) Герметичный корпус;
2) Оптоволоконный световод;
3) Волоконная брэгговская решетка для определения ускорения перемещения;
4) Волоконная брэгговская решетка для определения ускорения вращения;
5) Выходное отверстие оптоволоконных световодов;
6) Мерный грузик;
7) Цифровое вычислительное устройство;
8) Драйвер управления сверлюминисцентным диодом;
9) Кабель управления;
10) Сверхлюминисцентный диод;
11) Оптоволоконный световод;
12) Спектрометр;
13) Оптический циркулятор;
14) Волоконная брэгговская решетка для определения температуры;
15) Датчик измерения;
16) Блок формирования широкополосного сигнала светового потока;
На фиг. 1 и фиг. 2 показана конструкция датчика измерения в виде герметичного корпуса 1, мерного грузика 6 с отверстиями для прохождения оптоволоконный световода, расположенного в центре корпуса и закрепленного на оптоволоконном световоде. Оптоволоконный световод пронизывает корпус и мерный грузик устройства измерения через соответствующие отверстия, образуя измерительные участки между корпусом и мерным грузиком. Оптоволоконный световод на измерительных участках содержит датчики ВБР 3, 4 служащими для определения ускорения перемещения и вращения мерного грузика по трем осям и датчик ВБР 14 для определения изменения температуры.
На фиг. 3 приведена блок схема системы измерения и оценки кориолисовых сил инерции для получения значений вибрации, ускорения, и перемещения объекта в пространстве по трем осям Х,У,Z вращения и трем осям перемещения Х,У,Z объекта.
Датчик измерения служит для передачи воздействия от движения объекта в пространстве по трем осям Х,У,Z относительного вращения и трем осям перемещения Х,У,Z посредством смещения мерного грузика относительно корпуса посредством преобразования сигналов от деформаций (растяжения - сжатия, изгиба) от датчиков ВБР - результата измерений оптоволоконного резонанса светового потока от длин волн λB1(λB9).
Датчик измерения представляет из себя герметичный корпус с отверстиями для световода, световод пронизывает корпус и мерный грузик не менее 5 раз, и образует 9 измерительных участков на которых закреплен мерный грузик и 10 измерительный участок, который закреплен на виброизолирующей площадке. Измерительные участки оптического световода, на которых закреплен мерный грузик содержат в себе ВБР.
В состав блока формирования широкополосного сигнала светового потока входит драйвер управления сверлюминисцентным диодом 8, кабель управления - 9, сверхлюминисцентный диод (СЛД) - 10, оптоволоконный световод - 2.
Цифровое вычислительное устройство 7 представляет из себя персональный компьютер, либо бортовую цифровую вычислительную машину, которая осуществляет роль управления формированием светового потока, и роль сбора, обработки и анализа полученных из спектрометра данных программным способом.
Система измерения трехмерного линейного и углового ускорения и перемещения объекта в пространстве с использованием волоконных брэгговских решеток работает следующим образом.
Герметичный корпус 1 датчика измерения, размещенного на объекте при движении объекта перемещается вместе с ним. Мерный грузик 6 под воздействием внешних инерционных сил смещается, отставая от корпуса. Оптоволоконный световод 11, на котором закреплен грузик и подсоединенное к корпусу датчика измерения начинает деформироваться. Деформация передается на каждый из ВБР - 3 и 4, встроенные в оптоволоконный световод, изменяют свое состояние от инерционного ускорения смещения корпуса 1.
Деформация датчиков ВБР приводит к растяжению - сжатию, изгибу оптических волокон датчиков ВБР и изменению периода решеток Брэгга - (и как следствие изменению длины волны - λB, согласно формулы - λB=2Λ·neff (где neff - эффективный коэффициент отражения сигнала светового потока). Формируется отраженный световой поток полезного сигнала от ВБР из основного светового потока, поданного со СЛД 10, через оптический циркулятор - 13. В сущности он является комбинированным полезным измерительным сигналом оптической деформации датчиков ВБР по трем осям Х,У,Z относительного вращения и трем осям перемещения Х,У,Z. Аналоговый сигнал (световое излучение) попадает в спектрометр 12, где преобразуется в цифровой электрический сигнал и поступает для дальнейшей обработки в цифровое вычислительное устройство - 7. Данные попадая на цифровое вычислительное устройство обрабатываются, и после обработки выводятся в удобном для пользователя виде.
Формирование лазерного сигнала осуществляется путем подачи сигнала от цифрового вычислительного устройства 7, который по электрическому кабелю 9 попадает на блок формирование лазерного сигнала 16, в драйвер управления СЛД 8. Основное назначение драйвера - управление параметрами лазерного излучения путем поддержания тока накачки лазера и заданной температуры в корпусе СЛД.
В блоке формирования широкополосного сигнала светового потока 16 формируется лазерное излучение - световой поток, который по оптоволоконному световоду поступает в оптический циркулятор 13, основное назначение которого - формирование полезного сигнала светового потока, полученного от ВБР. Циркулятор 13 - оптический прибор, разделяющий световой поток на три части по трем портам с помощью встроенных в него оптических призм. С первого порта от СЛД световой поток поступает на второй порт циркулятора, далее на датчики ВБР 3, 4, 14, от датчиков ВБР 3, 4, 14 отраженный сигнал поступает обратно на циркулятор 13, и далее через порт 3 на спектрометр 12.
Отраженный сигнал от датчиков ВБР 3, 4, 14 формирует значение сигнала от воздействия инерционных сил при движении объекта в пространстве по трем осям Х,У,Z относительного вращения и трем осям перемещения Х,У,Z посредством смещения мерного грузика относительно корпуса посредством преобразования сигналов от деформаций растяжения - сжатия и изгиба; направления вращения корпуса лазерного гироскопа с помощью датчиков ВБР 4. Датчик ВБР 14 служит для компенсации температурных изменений в корпусе лазерного гироскопа. Отраженные сигналы светового потока датчиков ВБР 3, 4, 14 в направлении противоположном основному потоку поступают через циркулятор 13 на спектрометр 12.
Световой поток полезного сигнала с датчиков ВБР 3, 4, 14, поступает по оптическому волокну в оптический разъем спектрометра 12 через систему поворотных зеркал, поступает на фокусное зеркало - коллиматор со встроенной дифракционной решеткой.
Здесь происходит преобразование светового потока в параллельное упорядоченное излучение для восприятия его части системой измерения, и получения кадра световой картины измеряемого полезного сигнала светового потока на - ПЗС (прибор с зарядовой связью - матрица). ПЗС прибор позволяет получить аналоговый сигнал видео. Для получения цифрового высокоскоростного изображения - кадра полезного сигнала служит аналоговый цифровой преобразователь. Для передачи данных цифрового кадра существует конвертор протокола цифрового сигнала кадра изображения, входящий в состав аналогово цифрового преобразователя. С выходного разъема спектрометра 12 по протоколу, кадр для обработки поступает на вход цифрового вычислительного устройства 7, где обрабатывается для получения данных измерения трехмерного ускорения, вибрации и перемещения.
Техническое преимущество предлагаемого изобретения заключается в измерении трехмерного ускорения, вибрации и перемещения объекта или его агрегатов с помощью оптоволоконного лазерной системы реализованной на датчиках с ВБР. Которые сохраняют свои характеристики при измерении деформации полезного сигнала в течение всего своего полного жизненного цикла. Появляется возможность, подключения десятков датчиков к одной ОВИС, располагая ее при этом на значительном удалении от объекта контроля, выполнение измерений осуществляется с высокой скоростью. Датчики измерения раскрытые в данной системе не подвергаются воздействию электромагнитных помех, обеспечивая высокую точность измерений.
Таким образом, предложенное изобретение может найти широкое применение в различных областях техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ СНАРЯДА НА ЭТАПЕ ВНУТРЕННЕЙ БАЛЛИСТИКИ | 2021 |
|
RU2780667C1 |
| УНИВЕРСАЛЬНЫЙ ИНЕРЦИАЛЬНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2020 |
|
RU2749641C1 |
| Волоконно-оптическая измерительная система | 2023 |
|
RU2825750C1 |
| Устройство и способ измерения спектральных характеристик волоконно-оптических брэгговских решеток | 2018 |
|
RU2700736C1 |
| Чувствительный элемент волоконно-оптического датчика и способ динамического измерения скорости, веса и расстояния между колесами транспортных средств | 2023 |
|
RU2816110C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЕЛИЧИНЫ ИЗНОСА И ТЕМПЕРАТУРЫ ИЗДЕЛИЯ ПРИ ТРЕНИИ (ВАРИАНТЫ) | 2016 |
|
RU2631082C1 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА (ВАРИАНТЫ) | 2012 |
|
RU2520963C2 |
| Чувствительный элемент волоконно-оптического тензометрического датчика для измерения продольного механического натяжения и способ измерения продольного механического натяжения объекта волоконно-оптическим тензометрическим датчиком | 2021 |
|
RU2771446C1 |
| ЦИФРОВОЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ | 2016 |
|
RU2674574C2 |
| ЦИФРОВОЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ | 2022 |
|
RU2813169C1 |

Изобретение относится к измерительной технике. Сущность изобретения заключается в том, что система измерения трёхмерного линейного и углового ускорения и перемещения объекта в пространстве с использованием волоконных брэгговских решеток содержит блок формирования широкополосного сигнала светового потока, оптоволоконный световод, оптический циркулятор, цифровое вычислительное устройство, при этом датчик измерения содержит герметичный корпус, внутри корпуса посредством оптоволоконного световода закреплен мерный грузик, на каждом измерительном участке между корпусом и мерным грузиком оптоволоконный световод содержит в себе волоконную брэгговскую решетку, на последнем измерительном участке оптоволоконный световод закреплен на виброизолирующей площадке, которая в свою очередь закреплена на корпусе на расстоянии от мерного грузика. Технический результат – повышение точности и надежности измерения ускорения, вибрации и перемещения объекта. 3 ил.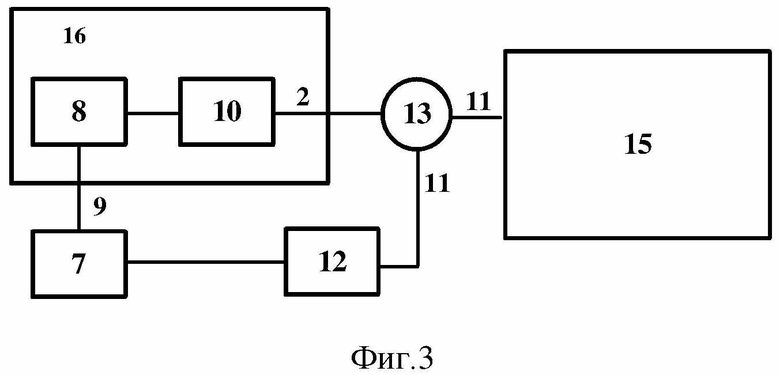
Система измерения трёхмерного линейного и углового ускорения и перемещения объекта в пространстве с использованием волоконных брэгговских решеток, характеризующаяся тем, что содержит блок формирования широкополосного сигнала светового потока, соединенный оптоволоконным световодом с первым портом оптического циркулятора, второй порт оптического циркулятора соединен оптоволоконным световодом с датчиком измерения, третий порт оптического циркулятора соединен оптоволоконным световодом с входом спектрометра, вход блока формирования широкополосного сигнала светового потока и выход спектрометра соединены с цифровым вычислительным устройством, при этом датчик измерения содержит герметичный корпус с входными и выходными отверстиями для оптоволоконного световода, внутри герметичного корпуса посредством оптоволоконного световода закреплен мерный грузик, причем оптоволоконный световод по меньшей мере пять раз проходит через корпус и мерный грузик, образуя по меньшей мере десять измерительных участков между корпусом и мерным грузиком, на каждом измерительном участке между корпусом и мерным грузиком оптоволоконный световод содержит в себе волоконную брэгговскую решетку, на последнем измерительном участке оптоволоконный световод закреплен на виброизолирующей площадке, которая в свою очередь закреплена на корпусе на расстоянии от мерного грузика.
| ВОЛОКОННО-ОПТИЧЕСКИЙ ГИРОСКОП | 2010 |
|
RU2444704C1 |
| СПОСОБ БОРЬБЫ С ГРИБНЫМИ ВОЗБУДИТЕЛЯМИ ЗАБОЛЕВАНИЙ РАСТЕНИЙ | 0 |
|
SU179547A1 |
| Устройство для измерения скорости на основе волоконного интерферометра Саньяка | 2018 |
|
RU2676392C1 |
| US 2016202284 A1, 14.07.2016 | |||
| US 6087655 A1, 11.07.2000. | |||

