Изобретение относится к системам огневого поражения объектов управляемыми боеприпасами.
Известен способ наведения самонаводящегося боеприпаса (СНБП) в условиях лазерного воздействия [см, например, пат. 2790053 RU, МПК F42B 15/01, F41G 9/00. Способ наведения самонаводящегося боеприпаса в условиях лазерного воздействия / Кулешов П.Е., Попело В.Д. Кулешова И.В.; заявитель и патентообладатель ВУНЦ ВВС «ВВА имени профессора Н.Е. Жуковского и Ю.А. Гагарина» (г. Воронеж). №2022109679; заявл. 11.04.2022; опубл. 14.02.2023, Бюл. №5], основанный на приеме оптического излучения цели оптико-электронным координатором (ОЭК) СНБП, измерении выходных сигналов фотоприемника оптического излучения цели ОЭК СНБП, определении по их значениям параметров углового рассогласования направления полета СНБП и направления на цель, корректировке по их значениям траектории полета СНБП на цель, дополнительном использовании двух матричных фотоприемников (МФП) поражающего лазерного излучения (ПЛИ), включающих по одной линейке координатно-привязанных фоточувствительных элементов (ФЧЭ), при этом дополнительные МФП размещают перпендикулярно друг другу в плоскости перпендикулярной оптической оси ОЭК на максимально возможном расстоянии от оптической оси ОЭК и на минимально возможном удалении от фокусной плоскости ОЭК, определяемыми конструктивными ограничениями их размещения в ОЭК, а их поля зрения ориентируют на оптическую ось ОЭК, осуществлении приема дополнительными МФП рассеянного вбок газовой средой ОЭК излучения источника ПЛИ, определении при обнаружении рассеянного вбок излучения источника ПЛИ координат ФЧЭ дополнительных МФП, сигнал на выходе которых превысил пороговое значение, определении по значениям координат ФЧЭ дополнительных МФП, сигнал на выходе которых превысил пороговое значение, параметров углового рассогласования направления полета СНБП и направления на источник ПЛИ, контроле работоспособности фотоприемника оптического излучения цели, и в случае его неработоспособности осуществлении корректировки траектории полета СНБП на источник ПЛИ по значениям параметров углового рассогласования направления полета СНБП и направления на источник ПЛИ, полученных с использованием дополнительных МФП.
Недостатком способа является использование двух перпендикулярно установленных МФП, которое ограничивает возможности их размещения в ОЭК и сектор приема рассеянного ПЛИ.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является повышение эффективности применения СНБП.
Технический результат достигается тем, что в известном способе наведения элемента в условиях лазерного воздействия, основанном на приеме оптического излучения цели ОЭК СНБП, измерении выходных сигналов фотоприемника оптического излучения цели ОЭК СНБП, определении по их значениям параметров углового рассогласования направления полета СНБП и направления на цель, корректировке по их значениям траектории полета СНБП на цель, дополнительном использовании МФП ПЛИ, включающего одну линейку координатно-привязанных ФЧЭ, при этом дополнительный МФП размещают перпендикулярно в плоскости перпендикулярной оптической оси ОЭК на максимально возможном расстоянии от оптической оси ОЭК и на минимально возможном удалении от фокусной плоскости ОЭК, определяемыми конструктивными ограничениями размещения в ОЭК, осуществлении приема дополнительным МФП рассеянного вбок газовой средой ОЭК излучения источника ПЛИ, определении при обнаружении рассеянного вбок излучения источника ПЛИ координат местоположения ФЧЭ дополнительного МФП, сигнал на выходе которых превысил пороговое значение, контроле работоспособности фотоприемника оптического излучения цели, и в случае его неработоспособности осуществлении корректировки траектории полета СНБП на источник ПЛИ по значениям параметров углового рассогласования направления полета СНБП и направления на источник ПЛИ, полученных с использованием дополнительного МФП, используют МФП кругового типа, при этом его центр размещают на оптической оси ОЭК, а поля зрения каждого ФЧЭ ориентируют на центр МФП кругового типа, измеряют значения выходных сигналов ФЧЭ и определяют координаты местоположения ФЧЭ с максимальным значением выходного сигнала, а также координаты местоположения ФЧЭ противоположного ФЧЭ с максимальным значением выходного сигнала, с использованием отношения значений выходных сигналов ФЧЭ с максимальным значением и противоположного ему, координат их местоположения, значения заданного радиуса МФП кругового типа, заданного значения коэффициента поглощения ПЛИ газовой средой ОЭК и пространственных параметров установки МФП кругового типа в ОЭК определяют параметры углового рассогласования направления полета СНБП и направления на источник ПЛИ.
Сущность способа заключается в обеспечении наведения СНБП в условиях применения источников ПЛИ путем приема рассеянного вбок ПЛИ излучения газовой средой в структуре ОЭК одним МФП кругового типа.
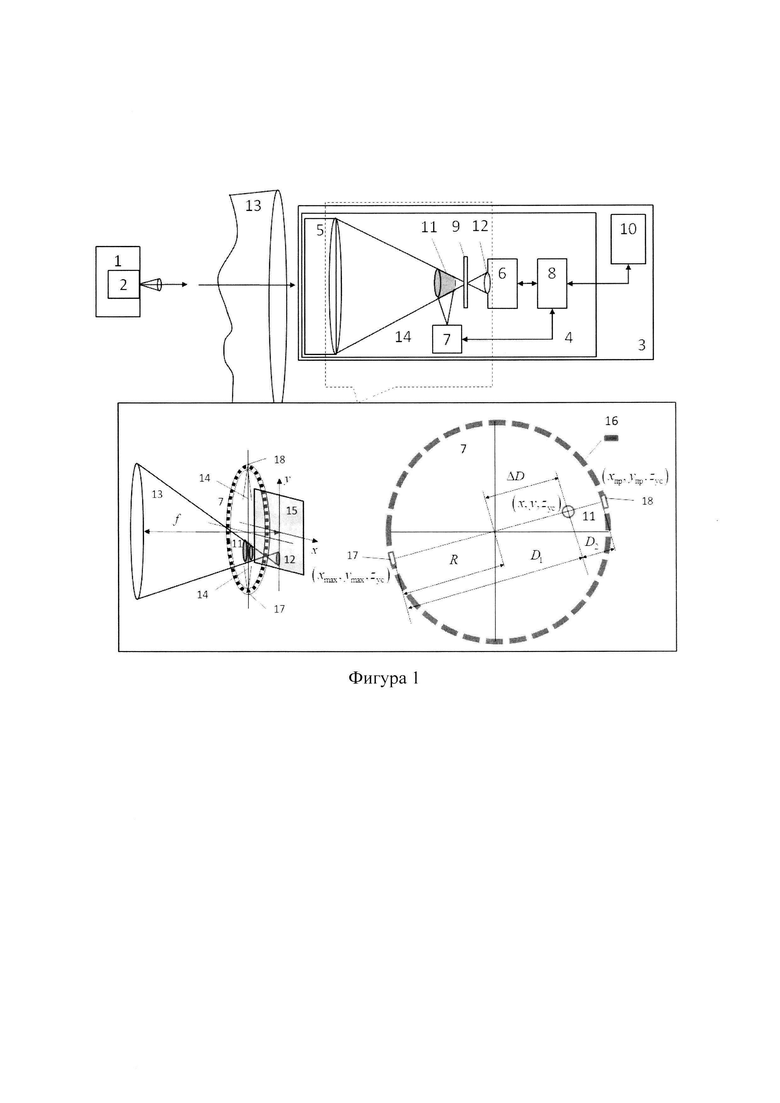
На фигуре 1 представлена схема, поясняющая существо способа (где приняты следующие обозначения: 1 - цель-объект поражения; 2 - КЛВ, 3 - СНБП; 4 - ОЭК СНБП; 5 - объектив ОЭК; 6, 7 - основной ФП и дополнительный МФП ОЭК; 8 - блок обработки ОЭК; 9 - модулятор ОЭК; 10 - рулевая система СНБП; 11 - участок ПЛИ, ограниченный полем зрения ФЧЭ МФП; 12 - область воздействия ПЛИ на основной ФП ОЭК; 13 - ПЛИ; 14 - поле зрения ФЧЭ дополнительного МФП; 15 - фокусная плоскость объектива ОЭК; 16 - ФЧЭ дополнительного МФП; 17 - ФЧЭ дополнительного МФП, имеющий максимальный сигнал на выходе; 18 -ФЧЭ дополнительного МФП противоположный ФЧЭ с максимальным сигналом на выходе ((xmax, ymax, zус), (хпр, упр, zyc) - координаты местоположения ФЧЭ дополнительного МФП, имеющего максимальный сигнал на выходе и противоположный ему ФЧЭ соответственно; ƒ - фокусное расстояние объектива ОЭК; R - радиус МФП; D1 - расстояние от ФЧЭ дополнительного МФП с максимальным сигналом на выходе до центра участка ПЛИ, ограниченного полем зрения ФЧЭ МФП; D2 - расстояние от ФЧЭ дополнительного МФП противоположного ФЧЭ с максимальным сигналом на выходе до центра участка ПЛИ, ограниченного полем зрения ФЧЭ МФП; ΔD - расстояние от центра дополнительного МФП до центра участка ПЛИ, ограниченного полем зрения ФЧЭ МФП; (x, y, zус) - координаты местоположения центра участка ПЛИ, ограниченного полем зрения ФЧЭ МФП).
В соответствии со схемой порядок действий, в предлагаемом способе, следующий. СНБП 3, используя ОЭК 4, принимает оптическое излучение цели-объекта поражения 1. В состав объекта поражения 1 включен КЛВ 2. КЛВ 2 по оптическому излучению двигателя или корпуса СНБП 3 обнаруживает его 3, осуществляет локационным модулем уточнение пространственных координат СНБП 3, наводит поражающий модуль и излучает в направление СНБП 3 ПЛИ 13. ПЛИ 13 объективом 5 фокусируется через модулятор 9 на ФП 6, формируя область освещенности 12, приводящую к потере работоспособности ФП 6. Дополнительный МФП 7 включает одну линейку координатно-привязанных ФЧЭ 16, расположенных по окружности. МФП 7 размещен в плоскости перпендикулярной оси ОЭК 4, при этом его центр также находится на оптической оси ОЭК 4. ФЧЭ 14 расположены на максимально возможном расстоянии от оптической оси ОЭК 4 и на минимально возможном удалении от фокусной плоскости ОЭК 15, определяемыми конструктивными ограничениями их размещения в ОЭК 4. Поля зрения ФЧЭ 14 дополнительного МФП 7 ориентированы на его центр и ограничивают ПЛИ 13 на траектории распространения до участка 11, позволяющего координатно его 11 локализовать по рассеянной вбок составляющей. Дополнительный МФП 7 осуществляет прием рассеянного вбок газовой средой ОЭК 4 ПЛИ 13. При обнаружении рассеянного вбок ПЛИ 13 измеряют значения выходных сигналов ФЧЭ 16, определяют координаты местоположения (xmax, ymax, zус) ФЧЭ 17 с максимальным значением выходного сигнала imax, а также координаты местоположения (хпр, упр, zyc) ФЧЭ 18 противоположного ФЧЭ 17 с максимальным значением выходного сигнала. С использованием отношения значений выходных сигналов imax, iпр ФЧЭ 17, 18, их координат местоположения (xmax, ymax, zус), (хпр, упр, zyc) значения радиуса R МФП 7, и пространственных параметров (0,0,zyc) его установки в ОЭК 4 определяют параметры углового рассогласования направления полета СНБП 3 и направления на источник ПЛИ 13 КЛВ 2. Блок обработки 8 ОЭК 4 контролирует работоспособность основного ФП 6. В случае потери работоспособности основного ФП 6 через блок обработки 8 СНБП 3 осуществляет с использованием рулевой системы 10 корректировку траектории своего полета на источник ПЛИ 13 по значениям параметров углового рассогласования, полученных по сигналам дополнительного МФП 7.
Для подтверждения возможности определения угловых координат ПЛИ 13 с использованием МФП 7 кругового типа приведем математическую модель.
Значения выходных сигналов ФЧЭ 17, 18 imax и iпр определяется соответствующими расстояниями D1 и D2 (фигура 1)

где b - обобщенный коэффициент преобразования интенсивности ПЛИ 13 в электрический сигнал ФЧЭ 17, 18; I - интенсивность ПЛИ 13 на участке 11, ограниченном полями зрения ФЧЭ 17, 18 МФП 7, а - обобщенный коэффициент поглощения ПЛИ 13 газовой средой ОЭК 4.
Отношение значения выходных сигналов ФЧЭ 17, 18 imax и iпр дает возможность определить координаты местоположения участка 11

Используя радиус МФП 7 R получим

Решение системы уравнений с использованием (3) и известных координат местоположения ФЧУ 17, 18
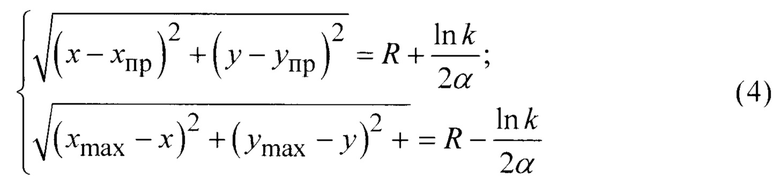
позволяет определить искомые координаты местоположения участка [x, y, zус), ограниченного полем зрения ФЧЭ МФП 11, и относительно их значений углы рассогласования направления полета СНБП 3 и направления на ПЛИ 13, например, как азимут и угол места

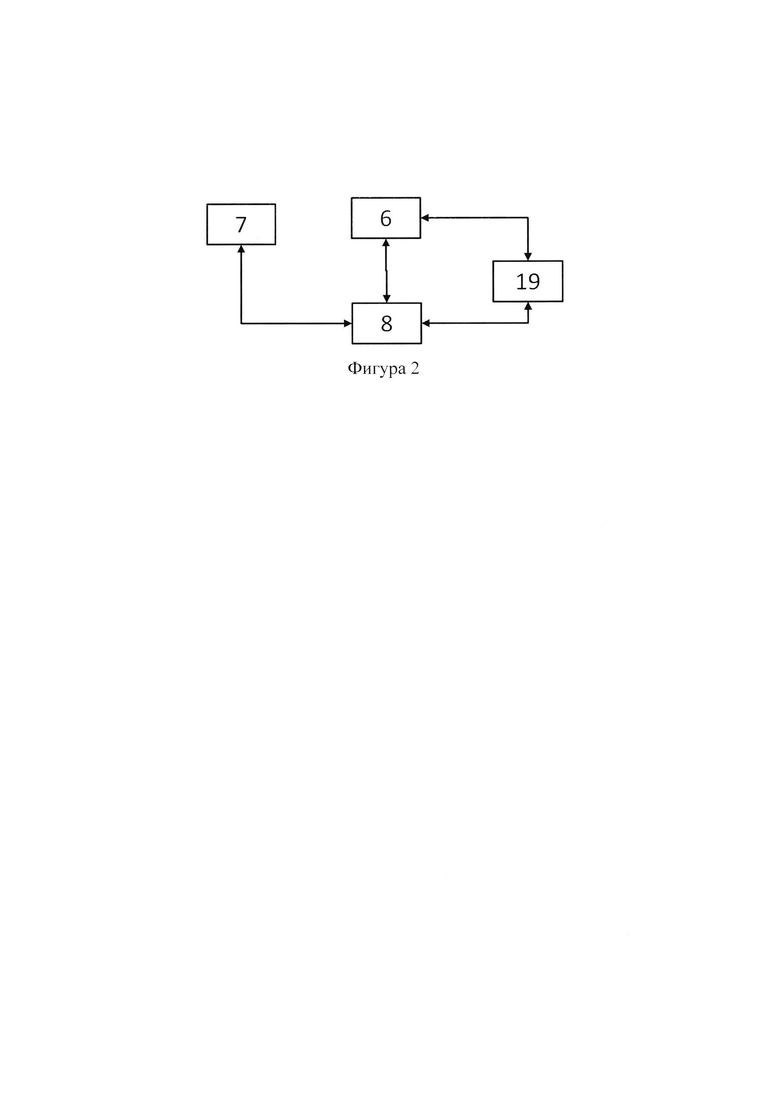
На фигуре 2 представлена блок - схема устройства, с помощь которого может быть реализован способ. Блок - схема устройства содержит: основной ФП 6, дополнительный МФП 7, блок обработки 8, датчик неработоспособности основного ФП 19 (часть обозначений соответствуют фигуре 1).
Устройство работает следующим образом. Блок обработки 8 осуществляет контроль выходных сигналов ФП 6, датчика неработоспособности основного ФП 19 и дополнительного МФП 7. При не поступлении сигналов от ФП 6, поступлении сигналов от датчика неработоспособности основного ФП 19 и поступлении сигналов от дополнительного МФП 7 блок обработки 8 считает ФП 6 неработоспособным и осуществляет формирование и передачу сигналов управления по значения выходных сигналов дополнительного МФП 7.
Таким образом, за счет осуществления координатного анализа распространения ПЛИ путем приема его рассеянного изучения вбок газовой средой в структуре ОЭК одним МФП кругового типа, у заявляемого способа появляются свойства повышения эффективности применения СНБП, обеспечивающих его наведение в условиях применения объектом для своей защиты источников ПЛИ. Тем самым, предлагаемый авторами способ, устраняет недостатки прототипа.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ наведения самонаводящегося элемента в условиях лазерного воздействия, основанный на приеме оптического излучения цели ОЭК СНБП, измерении выходных сигналов фотоприемника оптического излучения цели ОЭК СНБП, определении по их значениям параметров углового рассогласования направления полета СНБП и направления на цель, корректировке по их значениям траектории полета СНБП на цель, дополнительном использовании МФП ПЛИ, включающего одну линейку координатно-привязанных ФЧЭ, при этом дополнительный МФП размещают перпендикулярно в плоскости перпендикулярной оптической оси ОЭК на максимально возможном расстоянии от оптической оси ОЭК и на минимально возможном удалении от фокусной плоскости ОЭК, определяемыми конструктивными ограничениями размещения в ОЭК, осуществлении приема дополнительным МФП рассеянного вбок газовой средой ОЭК излучения источника ПЛИ, определении при обнаружении рассеянного вбок излучения источника ПЛИ координат местоположения ФЧЭ дополнительного МФП, сигнал на выходе которых превысил пороговое значение, контроле работоспособности фотоприемника оптического излучения цели, и в случае его неработоспособности осуществлении корректировки траектории полета СНБП на источник ПЛИ по значениям параметров углового рассогласования направления полета СНБП и направления на источник ПЛИ, полученных с использованием дополнительного МФП, использовании МФП кругового типа, при этом его центр размещают на оптической оси ОЭК, а поля зрения каждого ФЧЭ ориентируют на центр МФП кругового типа, измерении значений выходных сигналов ФЧЭ и определении координат местоположения ФЧЭ с максимальным значением выходного сигнала, а также координат местоположения ФЧЭ противоположного ФЧЭ с максимальным значением выходного сигнала, определении с использованием отношения значений выходных сигналов ФЧЭ с максимальным значением и противоположного ему, их координат местоположения, значения заданного радиуса МФП кругового типа, заданного значения коэффициента поглощения ПЛИ газовой средой ОЭК и пространственных параметров установки МФП кругового типа в ОЭК параметров углового рассогласования направления полета СНБП и направления на источник ПЛИ.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые электротехнические узлы и устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОМЕХОЗАЩИТЫ ОПТИКО-ЭЛЕКТРОННОГО КООРДИНАТОРА САМОНАВОДЯЩЕГОСЯ ЭЛЕМЕНТА ОТ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 2024 |
|
RU2838017C1 |
| СПОСОБ ЗАЩИТЫ ОПТИКО-ЭЛЕКТРОННОГО КООРДИНАТОРА ОТ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 2024 |
|
RU2835084C1 |
| СПОСОБ НАВЕДЕНИЯ САМОНАВОДЯЩЕГОСЯ БОЕПРИПАСА В УСЛОВИЯХ ЛАЗЕРНОГО ВОЗДЕЙСТВИЯ | 2022 |
|
RU2790053C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ФУНКЦИОНИРОВАНИЯ ОПТИКО-ЭЛЕКТРОННОГО КООРДИНАТОРА НАВЕДЕНИЯ В УСЛОВИЯХ ВОЗДЕЙСТВИЯ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2022 |
|
RU2801788C1 |
| СПОСОБ ПРОТИВОДЕЙСТВИЯ УПРАВЛЯЕМЫМ БОЕПРИПАСАМ | 2015 |
|
RU2593522C1 |
| СПОСОБ ОДНОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2020 |
|
RU2755733C1 |
| СПОСОБ ОДНОПОЗИЦИОННОГО ИЗМЕРЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2021 |
|
RU2784337C1 |
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОЗАЩИЩЕННОСТИ УПРАВЛЯЕМЫХ БОЕПРИПАСОВ С ЛАЗЕРНОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2020 |
|
RU2755592C1 |
| СПОСОБ НАВЕДЕНИЯ САМОНАВОДЯЩЕГОСЯ БОЕПРИПАСА | 2022 |
|
RU2790052C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ ПО РАССЕЯННОЙ В АТМОСФЕРЕ СОСТАВЛЯЮЩЕЙ | 2014 |
|
RU2591589C1 |
Изобретение относится к системам огневого поражения объектов управляемыми боеприпасами. Способ наведения самонаводящегося элемента в условиях лазерного воздействия заключается в приеме оптического излучения цели оптико-электронным координатором (ОЭК) самонаводящегося боеприпаса, измерении выходных сигналов фотоприемника оптического излучения цели ОЭК самонаводящегося боеприпаса, определении по их значениям параметров углового рассогласования направления полета самонаводящегося боеприпаса и направления на цель, корректировке по их значениям траектории полета самонаводящегося боеприпаса на цель и дополнительном использовании матричного фотоприемника (МФП) поражающего лазерного излучения (ПЛИ) кругового типа, который размещают перпендикулярно в плоскости, перпендикулярной оптической оси оптико-электронного координатора, на максимально возможном расстоянии от оптической оси ОЭК и на минимально возможном удалении от фокусной плоскости ОЭК, осуществлении приема МФП рассеянного вбок газовой средой ОЭК излучения источника поражающего лазерного излучения, определении при обнаружении рассеянного вбок излучения источника поражающего лазерного излучения координат местоположения фоточувствительных элементов МФП, сигнал на выходе которых превысил пороговое значение, и контроле работоспособности фотоприемника оптического излучения цели. В случае его неработоспособности осуществляется корректировка траектории полета самонаводящегося боеприпаса на источник поражающего лазерного излучения по значениям параметров углового рассогласования направления полета самонаводящегося боеприпаса и направления на источник поражающего лазерного излучения, полученным с использованием МФП. Причем центр МФП поражающего излучения ПЛИ размещают на оптической оси ОЭК, а поля зрения каждого фоточувствительного элемента (ФЧЭ) ориентируют на центр МФП. Измеряют значения выходных сигналов ФЧЭ и определяют координаты местоположения ФЧЭ с максимальным значением выходного сигнала, а также координаты местоположения ФЧЭ, противоположного ФЧЭ с максимальным значением выходного сигнала. С использованием отношения значений выходных сигналов ФЧЭ с максимальным значением и противоположного ему, их координат местоположения, значения заданного радиуса МФП кругового типа, заданного значения коэффициента поглощения ПЛИ газовой средой ОЭК и пространственных параметров установки МФП кругового типа в ОЭК определяют параметры углового рассогласования направления полета самонаводящегося боеприпаса и направления на источник ПЛИ. Технический результат - повышение эффективности применения самонаводящегося боеприпаса. 2 ил.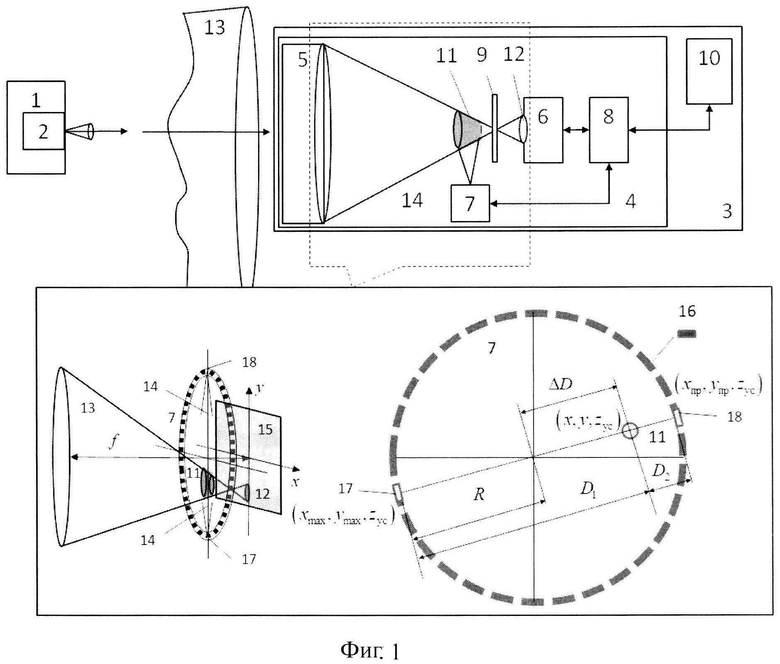
Способ наведения самонаводящегося элемента в условиях лазерного воздействия, заключающийся в приеме оптического излучения цели оптико-электронным координатором самонаводящегося боеприпаса, измерении выходных сигналов фотоприемника оптического излучения цели оптико-электронным координатором самонаводящегося боеприпаса, определении по их значениям параметров углового рассогласования направления полета самонаводящегося боеприпаса и направления на цель, корректировке по их значениям траектории полета самонаводящегося боеприпаса на цель, дополнительном использовании матричного фотоприемника поражающего лазерного излучения, включающего одну линейку координатно-привязанных фоточувствительных элементов, при этом дополнительный матричный фотоприемник размещают перпендикулярно в плоскости, перпендикулярной оптической оси оптико-электронного координатора, на максимально возможном расстоянии от оптической оси оптико-электронного координатора и на минимально возможном удалении от фокусной плоскости оптико-электронного координатора, определяемых конструктивными ограничениями размещения в оптико-электронном координаторе, осуществлении приема дополнительным матричным фотоприемником рассеянного вбок газовой средой оптико-электронного координатора излучения источника поражающего лазерного излучения, определении при обнаружении рассеянного вбок излучения источника поражающего лазерного излучения координат местоположения фоточувствительных элементов дополнительного матричного фотоприемника, сигнал на выходе которых превысил пороговое значение, контроле работоспособности фотоприемника оптического излучения цели, и в случае его неработоспособности осуществлении корректировки траектории полета самонаводящегося боеприпаса на источник поражающего лазерного излучения по значениям параметров углового рассогласования направления полета самонаводящегося боеприпаса и направления на источник поражающего лазерного излучения, полученным с использованием дополнительного матричного фотоприемника, отличающийся тем, что используют матричный фотоприемник кругового типа, при этом его центр размещают на оптической оси оптико-электронного координатора, а поля зрения каждого фоточувствительного элемента ориентируют на центр матричного фотоприемника кругового типа, измеряют значения выходных сигналов фоточувствительных элементов и определяют координаты местоположения фоточувствительного элемента с максимальным значением выходного сигнала, а также координаты местоположения фоточувствительного элемента, противоположного фоточувствительному элементу с максимальным значением выходного сигнала, с использованием отношения значений выходных сигналов фоточувствительных элементов с максимальным значением и противоположного ему, их координат местоположения, значения заданного радиуса матричного фотоприемника кругового типа, заданного значения коэффициента поглощения поражающего лазерного излучения газовой средой оптико-электронного координатора и пространственных параметров установки матричного фотоприемника кругового типа в оптико-электронном координаторе определяют параметры углового рассогласования направления полета самонаводящегося боеприпаса и направления на источник поражающего лазерного излучения.
| СПОСОБ НАВЕДЕНИЯ САМОНАВОДЯЩЕГОСЯ БОЕПРИПАСА В УСЛОВИЯХ ЛАЗЕРНОГО ВОЗДЕЙСТВИЯ | 2022 |
|
RU2790053C1 |
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОЗАЩИЩЕННОСТИ УПРАВЛЯЕМЫХ БОЕПРИПАСОВ С ЛАЗЕРНОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2020 |
|
RU2755592C1 |
| Способ наведения управляемого боеприпаса | 2016 |
|
RU2635299C1 |
| CN 104296598 A, 21.01.2015 | |||
| СИСТЕМА ПОДАЧИ ДЛЯ СТРУЙНОГО ПРИНТЕРА | 2016 |
|
RU2687809C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМЫХ БОЕПРИПАСОВ В МЕСТА РАЗМЕЩЕНИЯ ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2003 |
|
RU2256871C1 |

