Изобретение относится к вооружению, в частности к системам огневого поражения объектов управляемыми боеприпасами.
Известен способ наведения управляемого боеприпаса (см., например, [1]), основанный на определении координат цели, подсвете области подстилающей поверхности лазерным излучением, захвате и наведении самонаводящимся боеприпасом (СНБ) по отраженному лазерному излучению от области подсвета подстилающей поверхности, перемещении области подсвета подстилающей поверхности лазерным излучением по заданной относительно координат цели траектории, исключающей подсвет лазерным излучением самой цели, определении параметров наведения СНБ на цель, учитывающих параметры траектории перемещения области подсвета подстилающей поверхности лазерным излучением, передаче их значений на СНБ.
Недостатком способа является привязка наведения СНБ к траектории сканирования подстилающей поверхности лазерным целеуказателем (ЛЦУ), что в случае изменения ее параметров может привести к срыву наведения СНБ на цель.
Известен способ наведения управляемого боеприпаса (прототип) (см., например, [2]), определении координат цели, подсвете области подстилающей поверхности направленным оптическим излучением, захвате и наведении СНБ по отраженному оптическому излучению от области подсвета подстилающей поверхности, выборе минимум двух областей подсвета подстилающей поверхности симметричных относительно координат цели и находящихся в поле зрения СНБ, периодическом подсвете направленным оптическим излучением выбранных областей подстилающей поверхности с частотой меньшей обратного значения постоянной времени накопления фотонов оптического излучения приемного устройства.
Недостатком способа является короткий период подсвета выбранных областей, обусловленный требованием не превышения значения постоянной времени накопления фотонов оптического излучения фотоприемником СНБ, что приводит к жестким скоростным ограничениям сканирующего блока ЛЦУ.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является повышение эффективности применения СНБ на излучение целеуказания.
Технический результат достигается тем, что в известном способе наведения СНБ, основанном на определении координат цели, выборе областей подсвета подстилающей поверхности, расположенных симметрично на равном расстоянии относительно координат цели и находящихся в поле зрения СНБ, периодическом подсвете выбранных областей подстилающей поверхности направленным оптическим излучением, приеме СНБ отраженных оптических излучений от областей подсвета подстилающей поверхности, осуществляют выбор четырех областей подсвета подстилающей поверхности, при этом расстояния между противоположными областями подсвета перпендикулярны, суммируют за период подсвета направленным оптическим излучением выбранных областей выходные сигналы для каждого фоточувствительного элемента фотоприемного устройства СНБ и по параметрам полученных суммарных сигналов за период подсвета направленным оптическим излучением выбранных областей для каждого фоточувствительного элемента фотоприемного устройства осуществляют наведение СНБ.
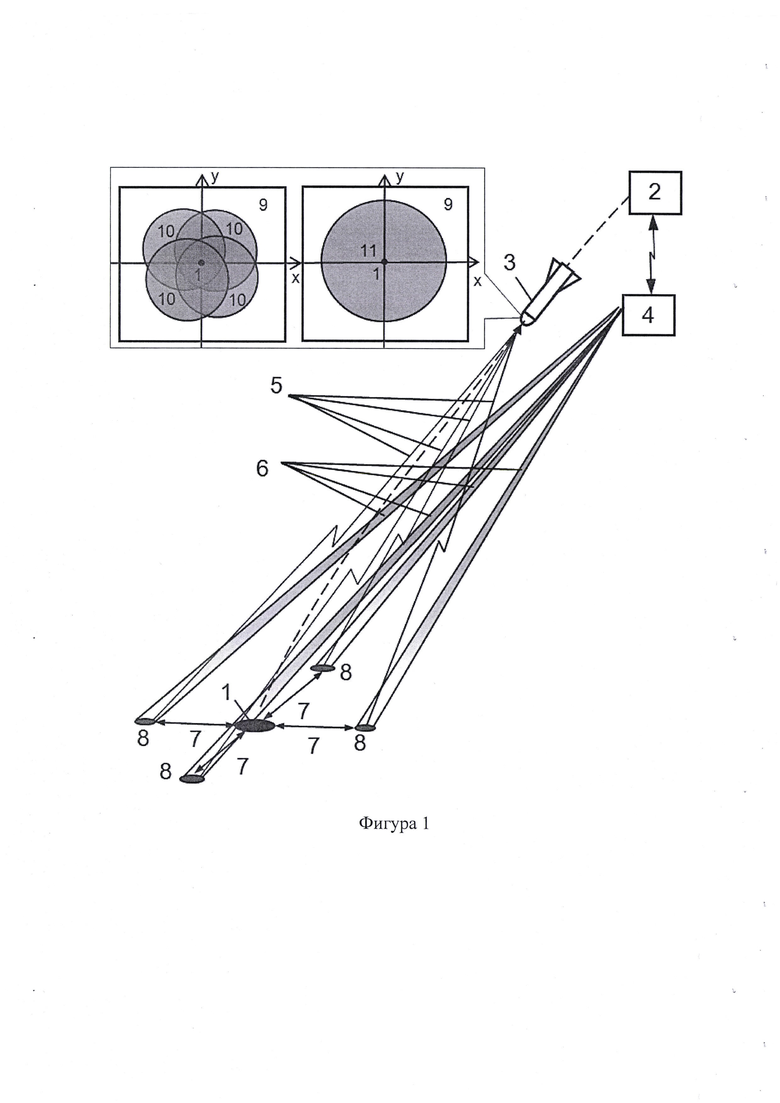
На фигуре 1 представлена схема, поясняющая существо способа (где приняты следующие обозначения: 1 - точка наведения-объект поражения, 2 - носитель-средство запуска СНБ, 3 - СНБ, 4 - ЛЦУ, 5 отраженное излучение в направлении СНБ, 6 - излучение подсвета ЛЦУ, 7 - геометрия расположения участков подсвета подстилающей относительно объекта поражения, 8 - участок подсвета подстилающей поверхности; 9 - фоточувствительная поверхность четырехэлементного ПОИ; 10 - изображения отраженных сигналов на фоточувствительной поверхности ПОИ; 11 - обобщенное изображение отраженных сигналов ПОИ).
В соответствии с поясняющей схемой порядок действий в предлагаемом способе следующий. Первоначально определяют координаты точки наведения-объекта поражения 1. Относительно координат точки наведения-объекта поражения 1 на ЛЦУ 4 программируют подсвет четырех участок подстилающей поверхности 8. При этом геометрия 7 выбора четырех участков подсвета подстилающей поверхности 8 симметрична относительно координат местоположения объекта поражения 1, а расстояния между противоположными областями подсвета 8 перпендикулярны. При этом обеспечивается исключение электромагнитной доступности элементами регистрации сигналов ЛЦУ 4 на объекте поражения 1 и нахождение участков подсвета 8 в поле зрения СНБ. ЛЦУ 4 осуществляет подсвет лучами 6 четырех участков подстилающей поверхности 8 относительно объекта поражения 1 с запрограммированной периодичностью. В результате на вход оптико-электронного координатора СНБ поступают с разных направлений отраженные излучения 5. После регистрации отраженных излучений 5 фотоприемником осуществляется за период подсвета направленным оптическим излучением выбранных областей суммирование параметров выходных сигналов его фоточувствительных элементов. На фоточувствительной поверхности четырехэлементного ПОИ 9 за период подчвета формируются четыре изображения 10 отраженных сигналов 5. Суммирования их параметров эквивалентно обобщенному по площади изображению 11 сигналов 10. Следовательно, оценка направления на цель 1 оптико-электронным координатором СНБ 3 производится по обобщенному изображению 11. Далее вырабатывается сигнал пеленгационного рассогласования и передается на автопилот. При этом алгоритм управления полетом СНБ 3 не изменяется.
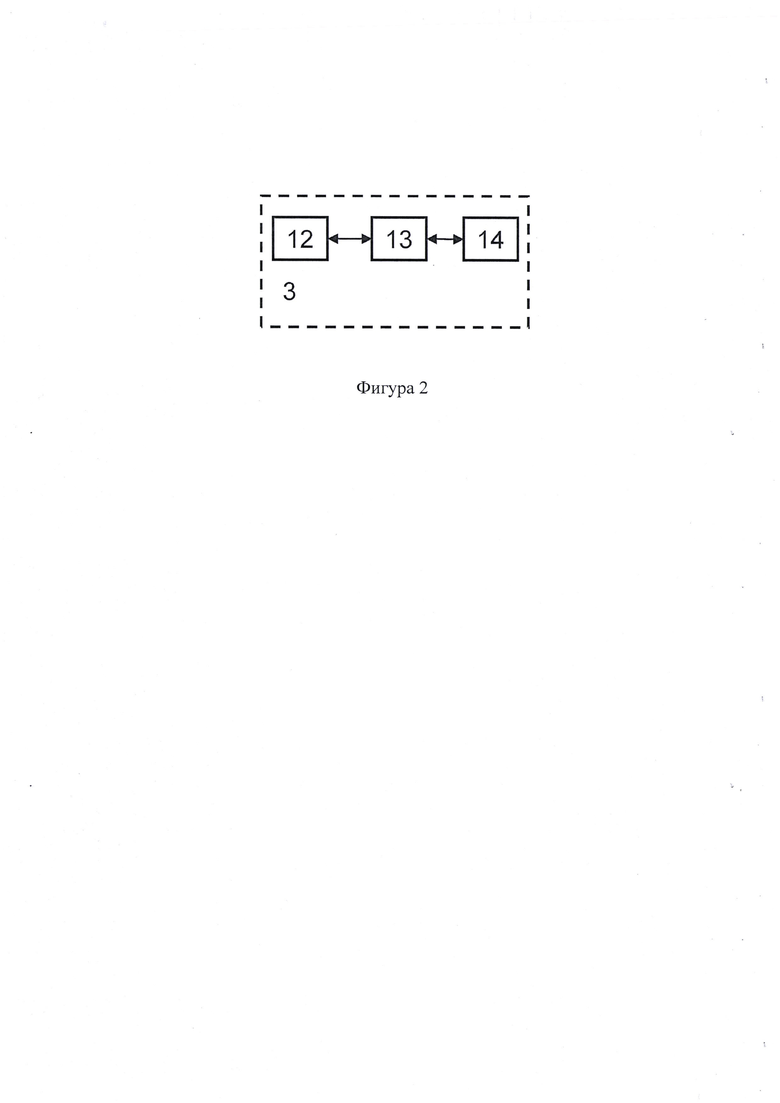
На фигуре 2 представлена блок - схема устройства, с помощь которого может быть реализован способ. Блок - схема устройства содержит: оптико-электронный координатор 13, бортовой вычислитель 14, автопилот 15, остальные обозначения соответствуют фигуре 1.
Устройство работает следующим образом. Оптико-электронный координатор принимает отраженное излучение ЛЦУ и передает выходные сигналы в бортовой вычислитель 14. Бортовой вычислитель 14 осуществляет их суммирование и пеленгационную (координатную) обработку, по значениям угловых рассогласований вырабатывает сигналы автопилоту 15. Автопилот по поступившим сигналам через исполнительные элементы корректирует полет СНБ 3.
Таким образом, за счет выбора минимум четырех областей подсвета с заданной геометрией расположения относительно координат цели и находящиеся в поле зрения СНБ и их периодическом подсвете направленным оптическим излучением с объединением выходных сигналов ПОИ СНБ за период подсвета у заявляемого способа появляются свойства повышения эффективности применения СНБ на излучение ЛЦУ. Тем самым, предлагаемый способ устраняет недостатки прототипа.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ наведения самонаводящегося боеприпаса, основанный на определении координат цели, выборе областей подсвета подстилающей поверхности, расположенных симметрично на равном расстоянии относительно координат цели и находящихся в поле зрения СНБ, периодическом подсвете выбранных областей подстилающей поверхности направленным оптическим излучением, приеме СНБ отраженных оптических излучений от областей подсвета подстилающей поверхности, осуществлении выбора четырех областей подсвета подстилающих поверхности, при этом расстояния между противоположными областями подсвета перпендикулярны, суммировании за период подсвета направленным оптическим излучением выбранных областей выходных сигналы для каждого фоточувствительного элемента фотоприемного устройства СНБ и по параметрам, полученных суммарных сигналов за период подсвета направленным оптическим излучением выбранных областей для каждого фоточувствительного элемента фотоприемного устройства, осуществлении наведения СНБ.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые электротехнические узлы и устройства.
1. Пат. 2635299 RU, МПК F41G 3/00. Способ наведения управляемого боеприпаса / Ю.Л. Козирацкий, А.Ю. Козирацкий, П.Е. Кулешов и др.; заявитель и патентообладатель ВУНЦ ВВС «ВВА им. проф. Н.Е. Жуковского и Ю.А. Гагарина» (г.Воронеж). - №2016119419; заявл. 19.05.2016; опубл. 09.11.2017, Бюл. №31.
2. Пат. 2660777 RU, МПК F41G 9/00. Способ наведения управляемого боеприпаса / Ю.Л. Козирацкий, А.Ю. Козирацкий, П.Е. Кулешов и др.; заявитель и патентообладатель ВУНЦ ВВС «ВВА им. проф. Н.Е. Жуковского и Ю.А. Гагарина» (г. Воронеж). - №2017110330; заявл. 28.03.2017; опубл. 09.07.2018, Бюл. №19.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОЗАЩИЩЕННОСТИ УПРАВЛЯЕМОГО БОЕПРИПАСА | 2019 |
|
RU2707426C1 |
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОЗАЩИЩЕННОСТИ УПРАВЛЯЕМЫХ БОЕПРИПАСОВ С ЛАЗЕРНОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2020 |
|
RU2755592C1 |
| Способ наведения управляемого боеприпаса | 2016 |
|
RU2635299C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА | 2017 |
|
RU2660777C1 |
| СПОСОБ НАВЕДЕНИЯ САМОНАВОДЯЩЕГОСЯ БОЕПРИПАСА В УСЛОВИЯХ ЛАЗЕРНОГО ВОЗДЕЙСТВИЯ | 2022 |
|
RU2790053C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ФУНКЦИОНИРОВАНИЯ ОПТИКО-ЭЛЕКТРОННОГО КООРДИНАТОРА НАВЕДЕНИЯ В УСЛОВИЯХ ВОЗДЕЙСТВИЯ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2022 |
|
RU2801788C1 |
| СПОСОБ ДОСТАВКИ ЗАБРАСЫВАЕМОГО ПЕРЕДАТЧИКА РАДИОПОМЕХ | 2020 |
|
RU2751548C1 |
| СПОСОБ СКРЫТИЯ ОПТИКО-ЭЛЕКТРОННЫХ СРЕДСТВ | 2018 |
|
RU2698569C1 |
| СПОСОБ ВЫСОКОТОЧНОГО ПОРАЖЕНИЯ РАДИОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 2014 |
|
RU2598687C2 |
| СПОСОБ НАВЕДЕНИЯ САМОНАВОДЯЩЕГОСЯ ЭЛЕМЕНТА В УСЛОВИЯХ ЛАЗЕРНОГО ВОЗДЕЙСТВИЯ | 2023 |
|
RU2816482C1 |
Изобретение относится к вооружению, в частности к системам огневого поражения объектов управляемыми боеприпасами. Сущность способа наведения самонаводящегося боеприпаса (СНБ) заключается в следующем. Определяют координаты цели. Выбирают четыре области подсвета подстилающей поверхности, расположенные симметрично на равном расстоянии относительно координат цели и находящиеся в поле зрения СНБ. При этом расстояния между противоположными областями подсвета перпендикулярны. Периодически подсвечивают выбранные области подстилающей поверхности направленным оптическим излучением. Принимают СНБ отраженные оптические излучения от областей подсвета подстилающей поверхности. Суммируют за период подсвета направленным оптическим излучением выбранных областей выходные сигналы для каждого фоточувствительного элемента фотоприемного устройства СНБ. По параметрам полученных суммарных сигналов за период подсвета направленным оптическим излучением выбранных областей для каждого фоточувствительного элемента фотоприемного устройства осуществляют наведение СНБ. Технический результат заключается в повышении эффективности применения СНБ на излучение целеуказания. 2 ил.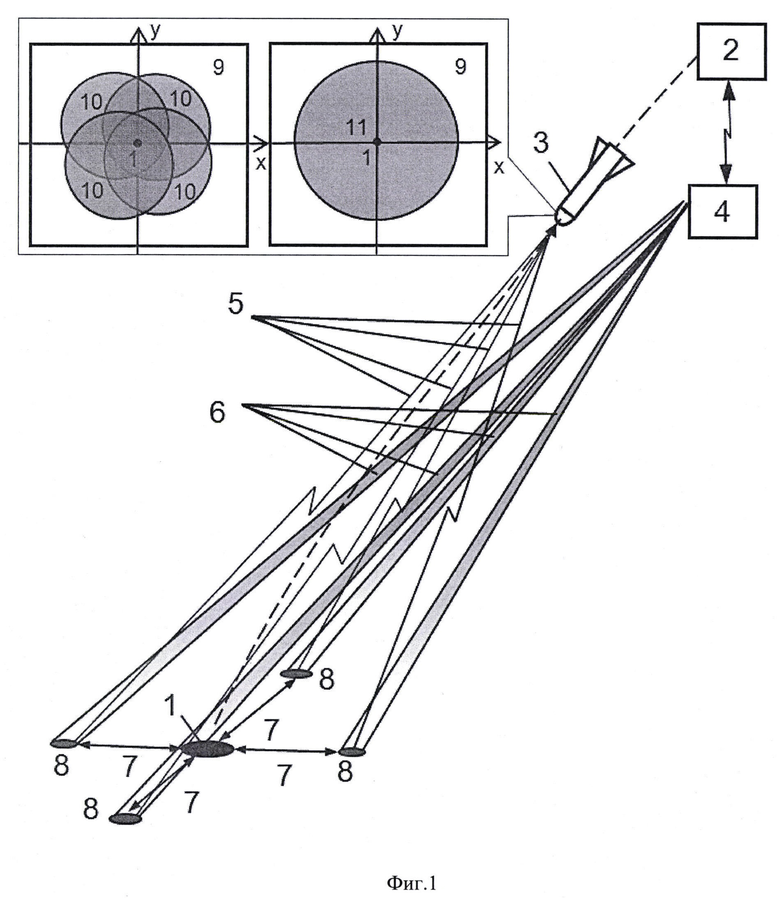
Способ наведения управляемого самонаводящегося боеприпаса, заключающийся в определении координат цели, выборе областей подсвета подстилающей поверхности, расположенных симметрично на равном расстоянии относительно координат цели и находящихся в поле зрения самонаводящегося боеприпаса, периодическом подсвете выбранных областей подстилающей поверхности направленным оптическим излучением, приеме самонаводящимся боеприпасом отраженных оптических излучений от областей подсвета подстилающей поверхности, отличающийся тем, что осуществляют выбор четырех областей подсвета подстилающей поверхности, при этом расстояния между противоположными областями подсвета перпендикулярны, суммируют за период подсвета направленным оптическим излучением выбранных областей выходные сигналы для каждого фоточувствительного элемента фотоприемного устройства самонаводящегося боеприпаса и по параметрам полученных суммарных сигналов за период подсвета направленным оптическим излучением выбранных областей для каждого фоточувствительного элемента фотоприемного устройства осуществляют наведение самонаводящегося боеприпаса.
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2722711C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2019 |
|
RU2737634C2 |
| 0 |
|
RU2220397C | |
| GB 1432933 A, 22.04.1976 | |||
| WO 2019132758 A1, 04.07.2019. | |||

