Область техники, к которой относится изобретение
Варианты осуществления настоящего изобретения относятся к способам и системам использования коэффициента заполнения импульсов датчиков для определения расхода семян или частиц.
Уровень техники
Пневматические сеялки имеют первичную систему распределения и вторичную систему распределения. Семена и, в ряде случаев, удобрения подаются из бункеров в систему первичного распределения и транспортируются воздухом во вторичную систему распределения. Коллектор между первичной системой распределения и вторичной системой распределения разделяет подачу так, что вторичная система распределения доставляет семена/удобрения в каждый рядок. Семена/удобрения транспортируются воздухом.
Датчики семян или удобрений на сельскохозяйственном оборудовании обычно представляют собой оптические датчики. Когда частица (семя или удобрение) проходит через оптический датчик, световой луч прерывается, и таким образом происходит обнаружение частицы. Частота такого обнаружения частиц может использоваться для определения популяции посадки, если частота достаточно низкая. Однако для сельскохозяйственных культур с более высокими расходами, таких как пшеница или удобрения, типичные оптические датчики размером 25 мм или 32 мм не имеют достаточно большой площади поперечного сечения для обнаружения отдельных частиц, что делает подсчет частиц с помощью этих датчиков ненадежным и неточным.
Краткое описание чертежей
Настоящее изобретение проиллюстрировано в качестве примера, но не в качестве ограничения, прилагаемыми к описанию чертежами, на которых показано:
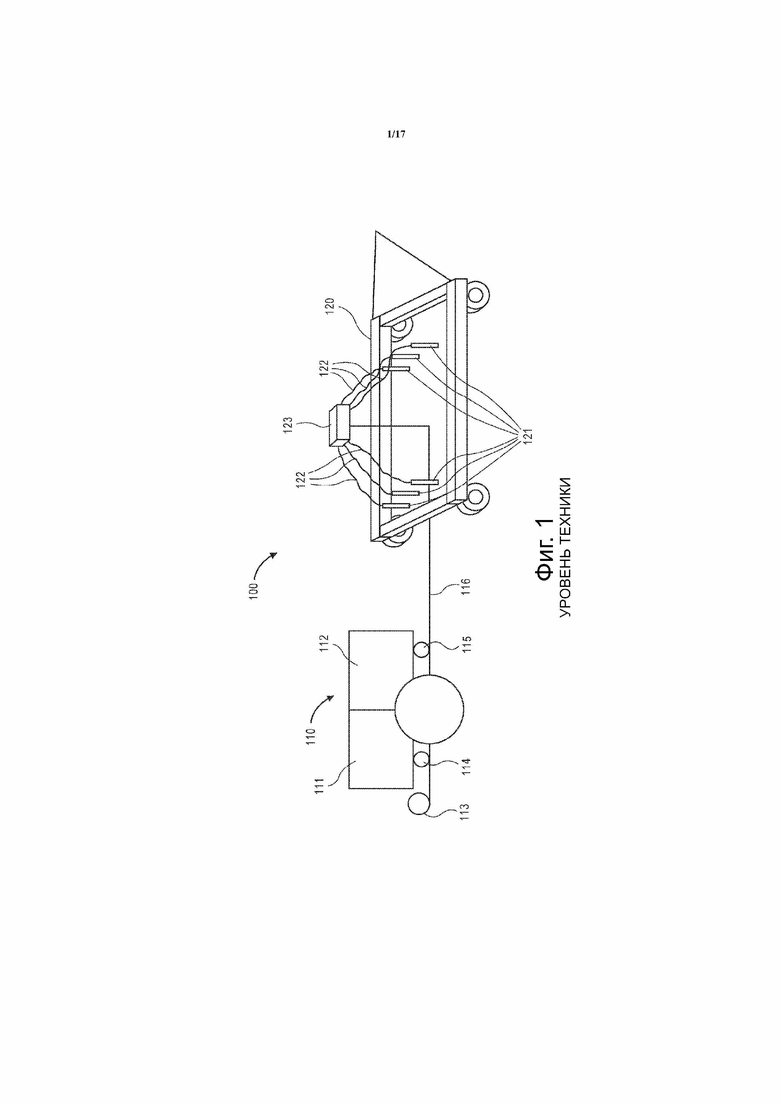
на фиг. 1 – пневматическая сеялка предшествующего уровня техники;
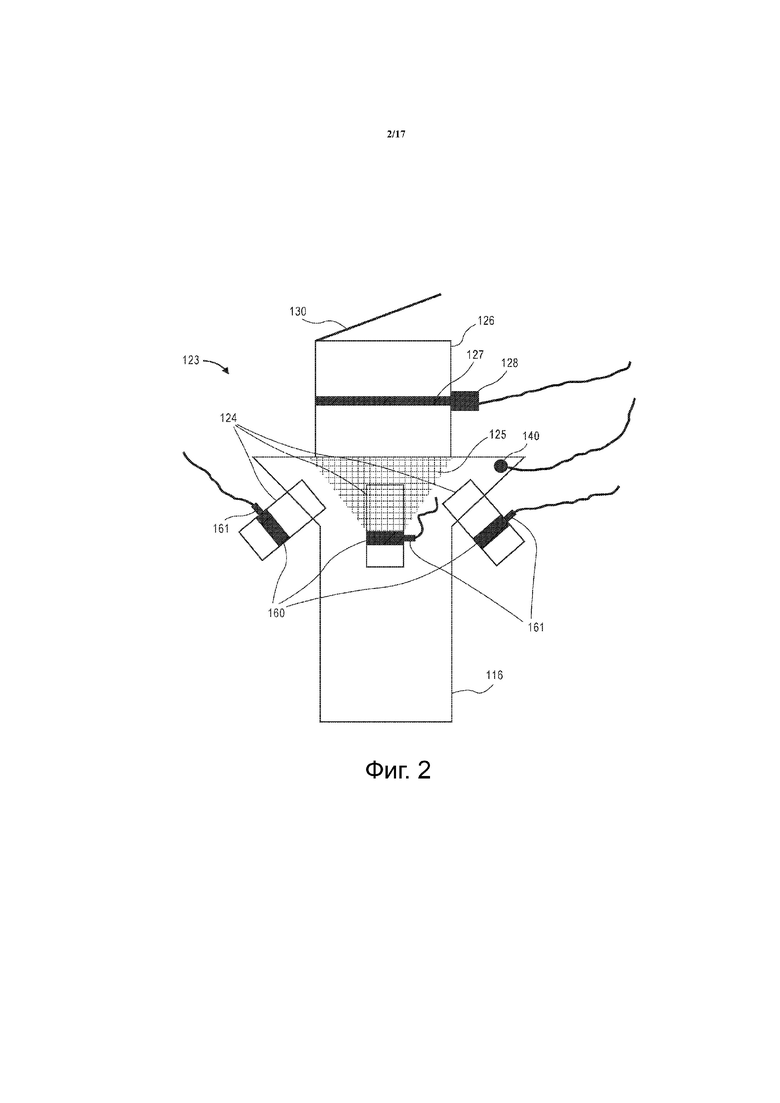
на фиг. 2 – башня пневматической сеялки в одном из вариантов осуществления, имеющая вентиляционный клапан и привод клапана;
на фиг. 3 – вторичный продуктопровод с датчиками расхода в одном из вариантов осуществления;
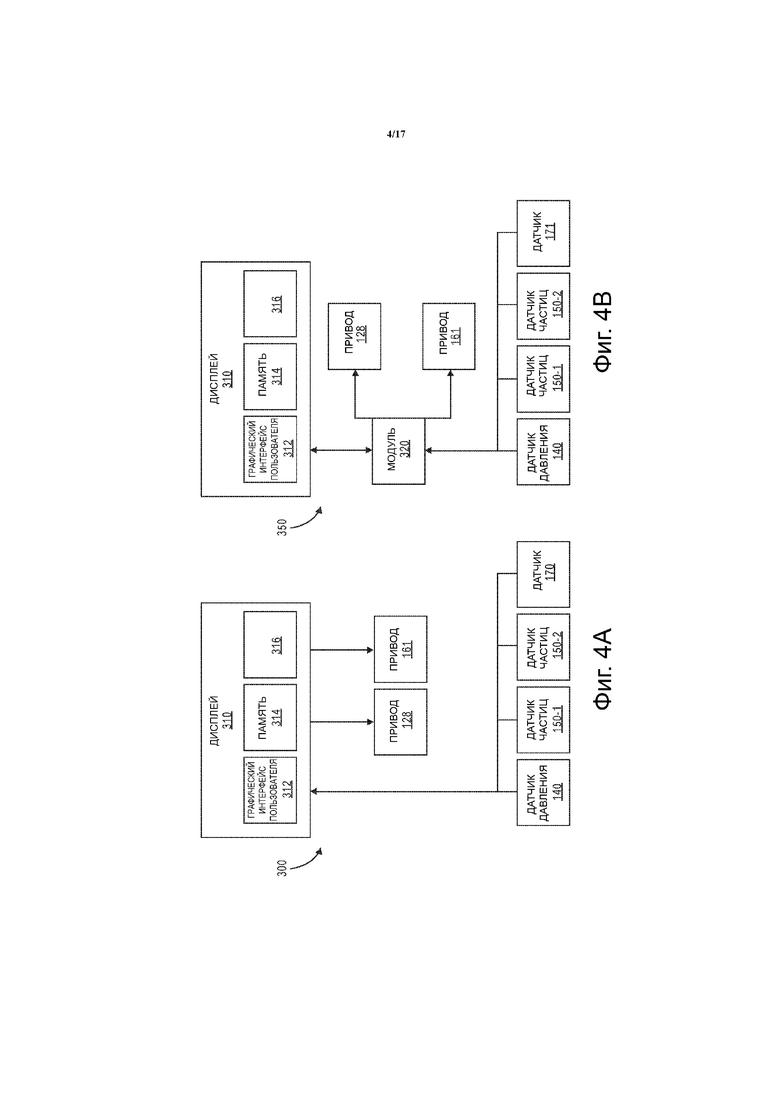
на фиг. 4A – схематический вид варианта осуществления электрической системы управления приводом;
на фиг. 4B – схематичный вид варианта осуществления электрической системы управления приводом;
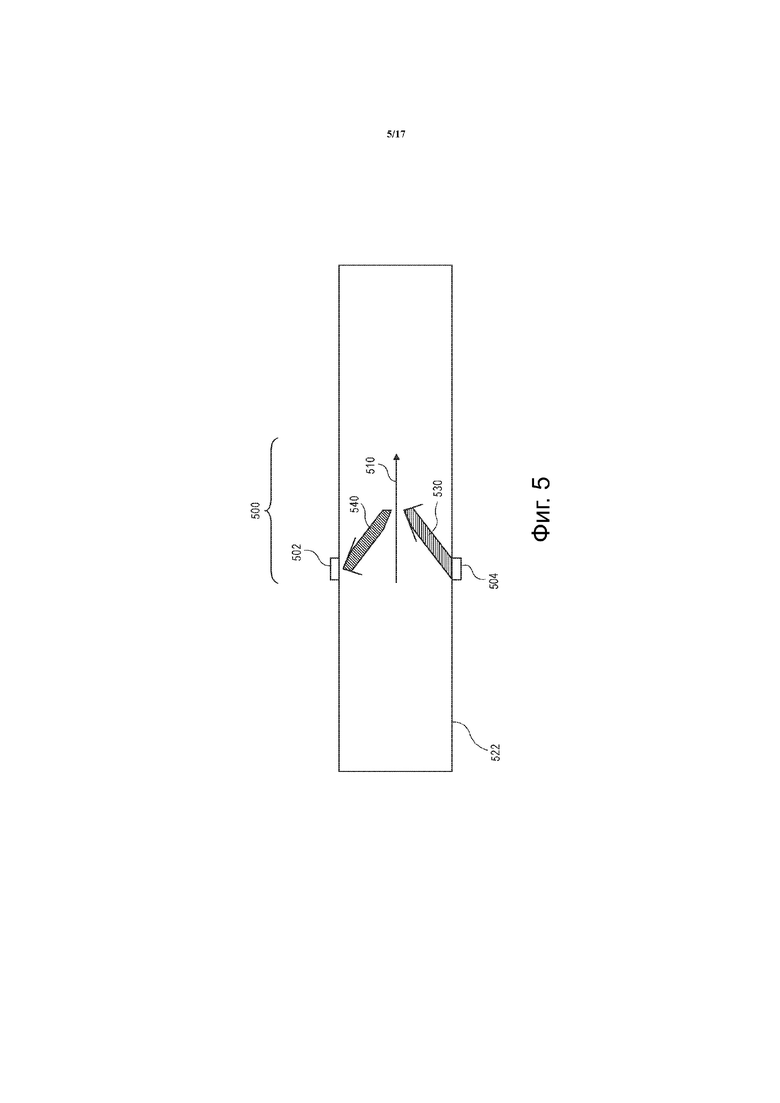
на фиг. 5 – вторичный продуктопровод с ультразвуковым датчиком в одном из вариантов осуществления;
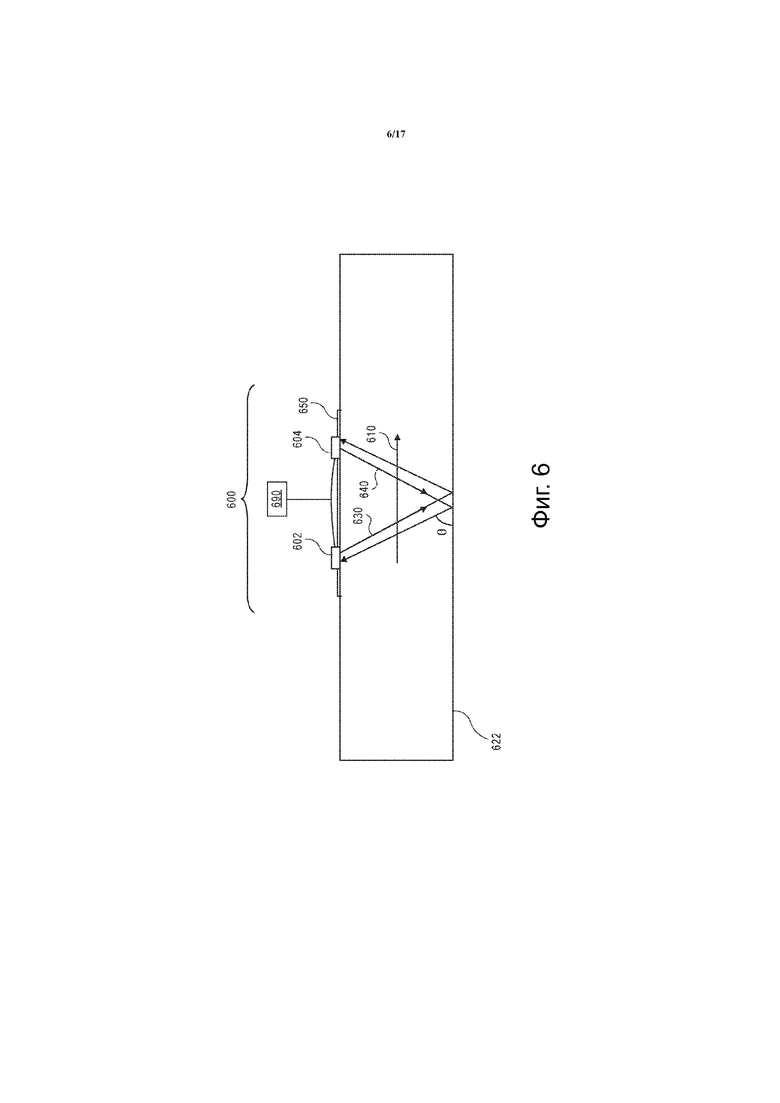
на фиг. 6 – вторичный продуктопровод с ультразвуковым датчиком в другом варианте осуществления;
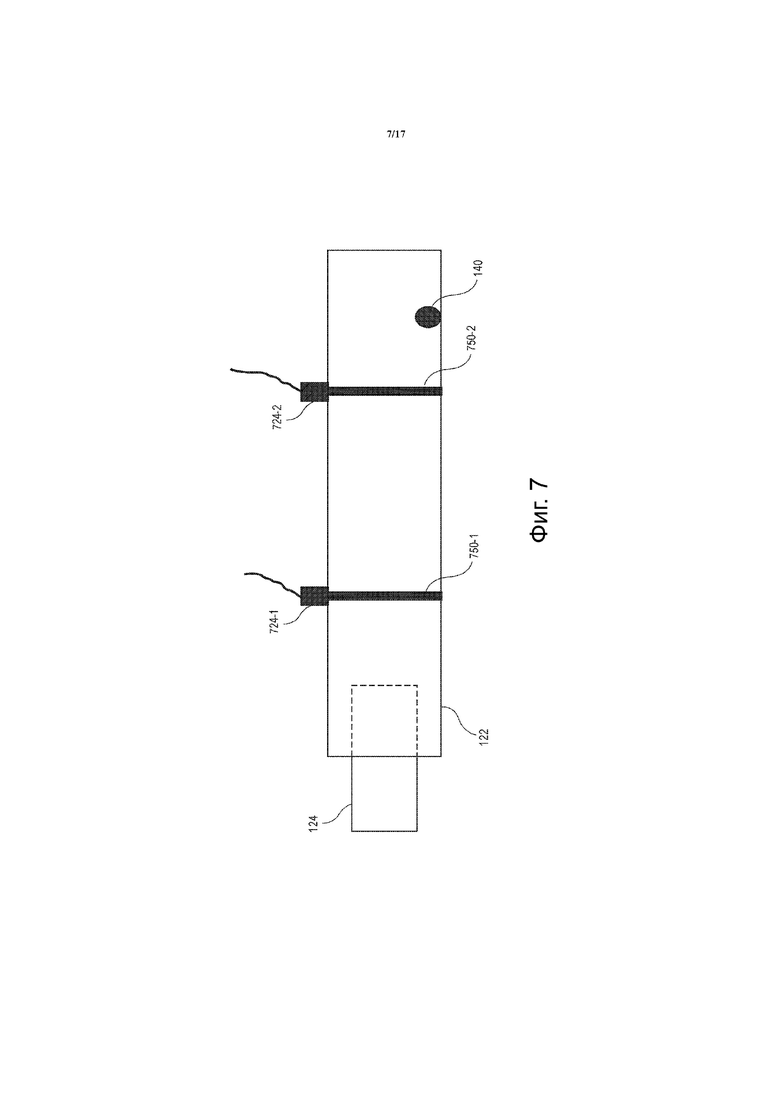
на фиг. 7 – вторичный продуктопровод 122, содержащий по меньшей мере один клапан (например, 750-1, 750-2) и по меньшей мере один соответствующий привод (например, 724-1, 724-2), в одном из вариантов осуществления;
на фиг. 8 – блок-схема одного из вариантов осуществления способа 800 использования коэффициента заполнения импульсов для определения метрик частиц и популяции;
на фиг. 9 – блок-схема одного из вариантов осуществления способа 900 использования коэффициента заполнения импульсов для оценки метрик частоты частиц;
на фиг. 10 – блок-схема одного из вариантов осуществления способа 1000 использования коэффициента заполнения импульсов для оценки метрик частоты частиц;
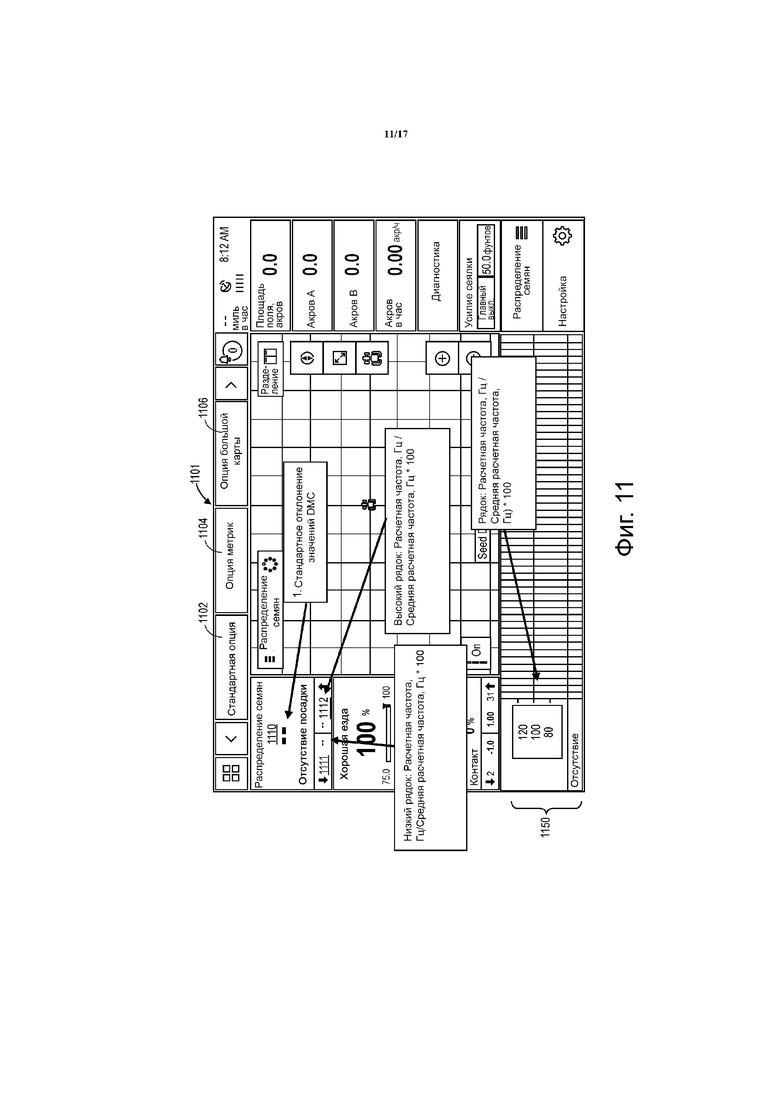
на фиг. 11 – монитор или устройство отображения, имеющее интерфейс 1101 пользователя с персонифицируемыми сельскохозяйственными параметрами, включая распределение семян, в одном из вариантов осуществления;
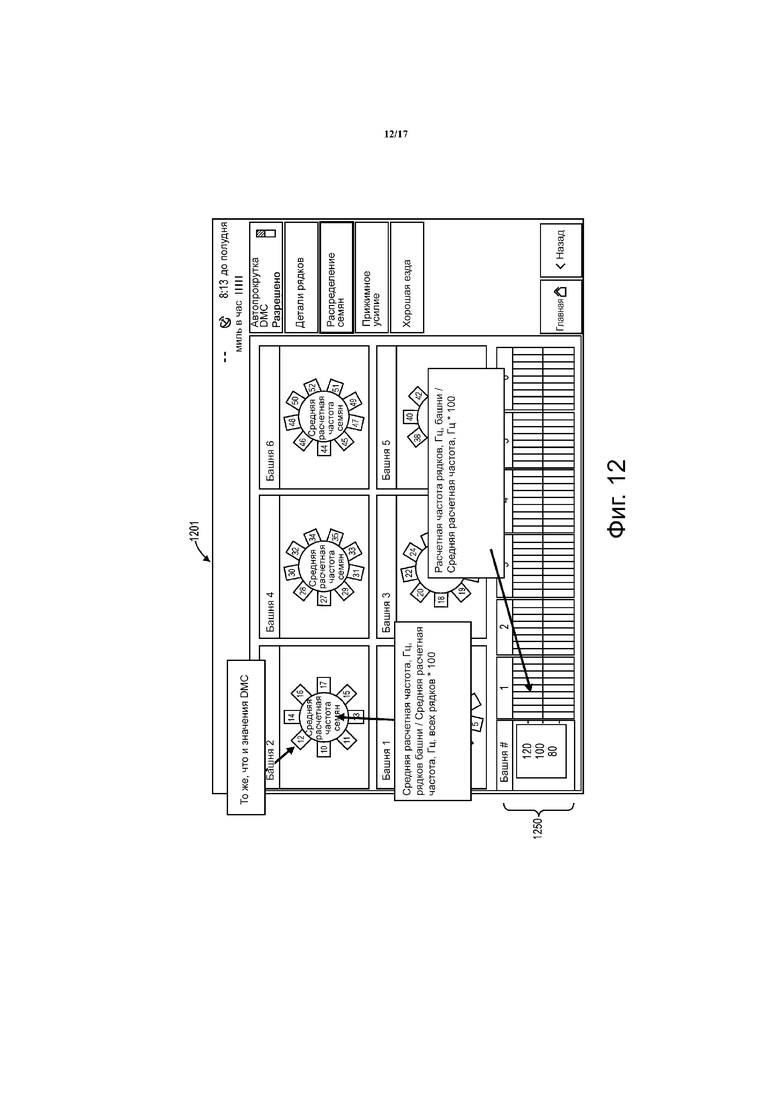
на фиг. 12 – монитор или устройство отображения, имеющее интерфейс 1201 пользователя с персонифицируемыми сельскохозяйственными параметрами, включая информацию о башне сельскохозяйственного орудия, в одном из вариантов осуществления;
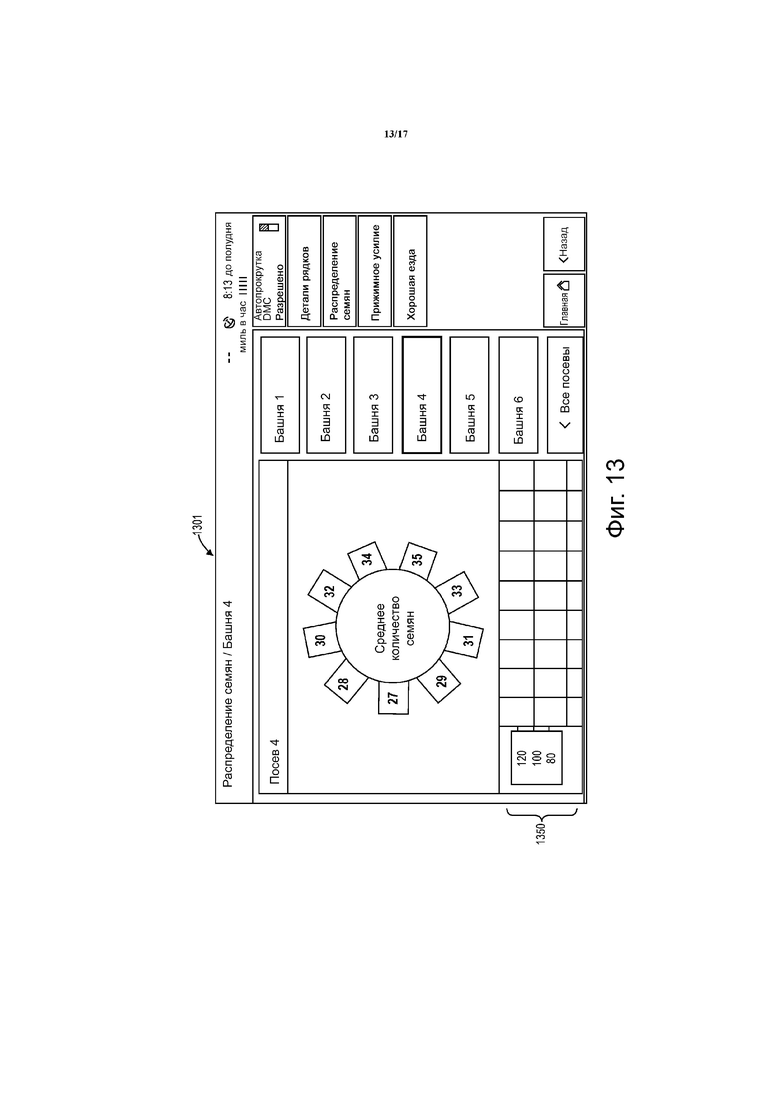
на фиг. 13 – монитор или устройство отображения, имеющее интерфейс 1301 пользователя с персонифицируемыми сельскохозяйственными параметрами, включая информацию о башне 4 сельскохозяйственного орудия, в одном из вариантов осуществления;
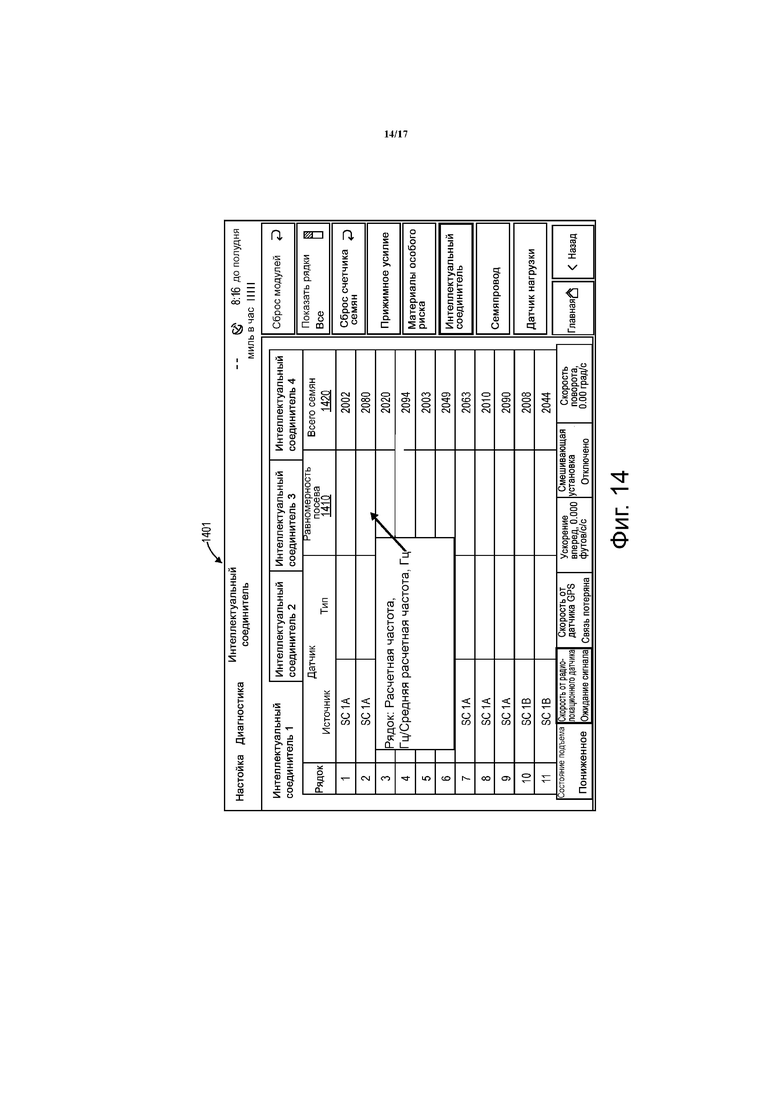
на фиг. 14 – монитор или устройство отображения, имеющее интерфейс 1401 пользователя с персонифицируемыми сельскохозяйственными параметрами, включая информацию об интеллектуальном соединителе и информацию об однородности семян для сельскохозяйственного орудия, в одном из вариантов осуществления;
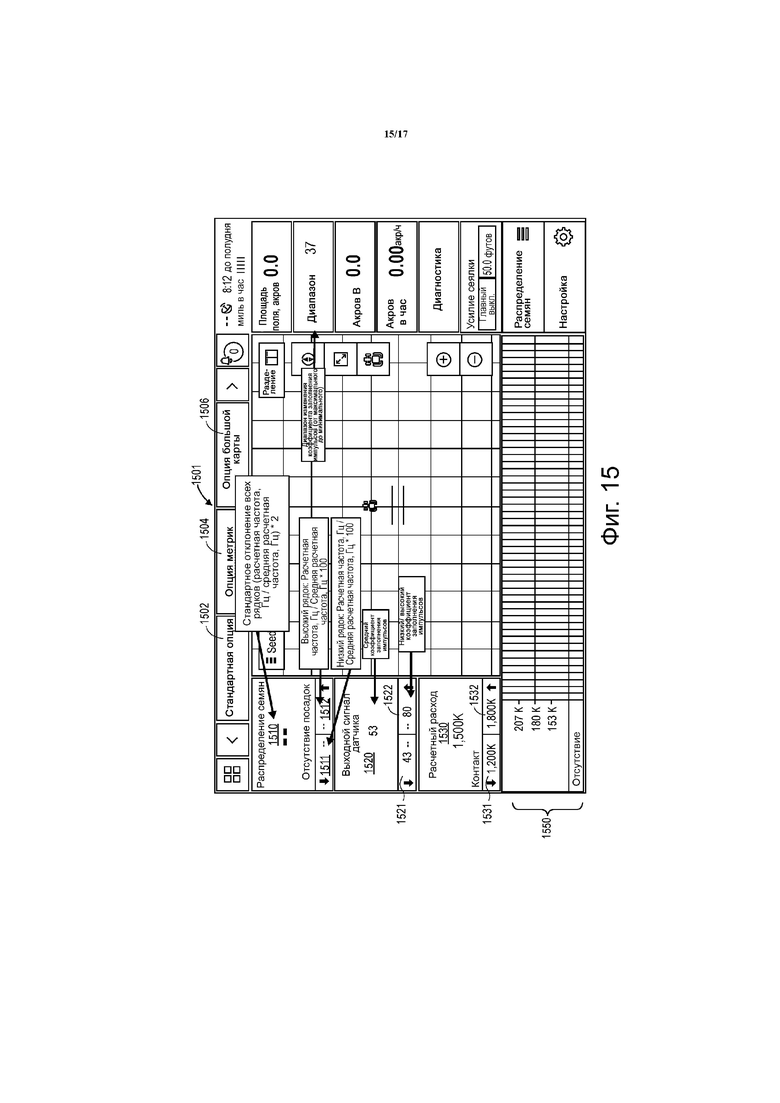
на фиг. 15 – монитор или устройство отображения, имеющее интерфейс 1501 пользователя с персонифицируемыми сельскохозяйственными параметрами, включая однородность семян, в одном из вариантов осуществления;
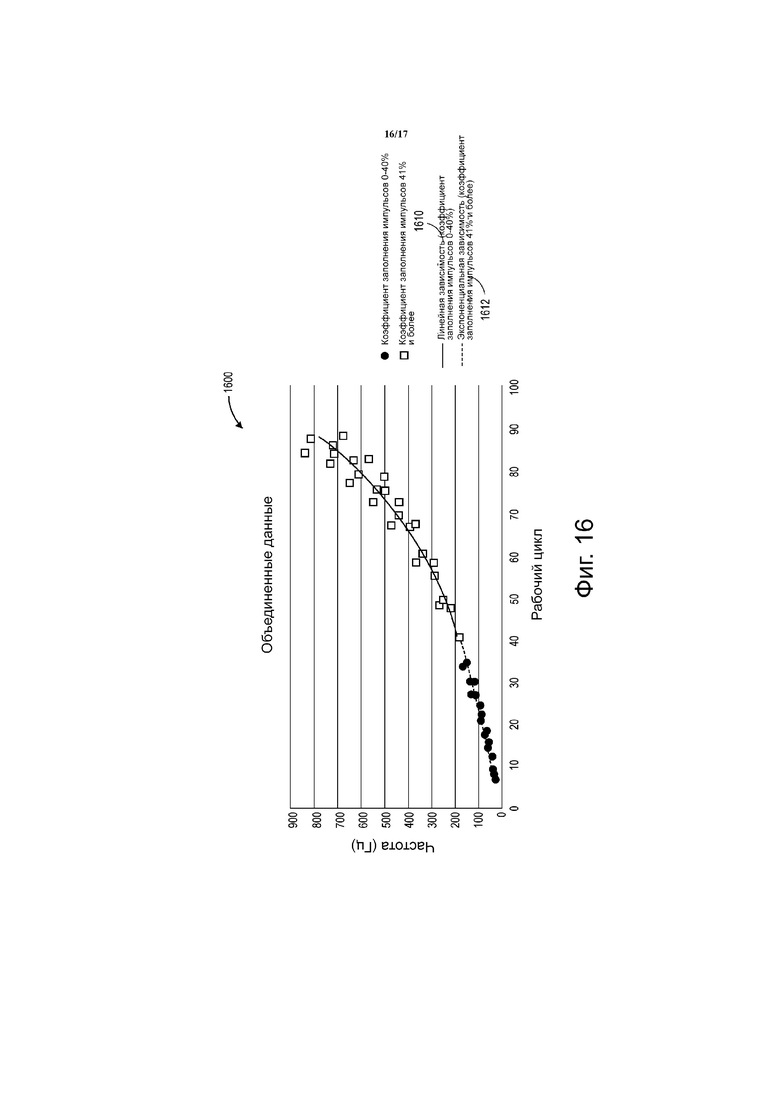
на фиг. 16 – график зависимости расчетной частоты от коэффициента заполнения импульсов в одном из вариантов осуществления;
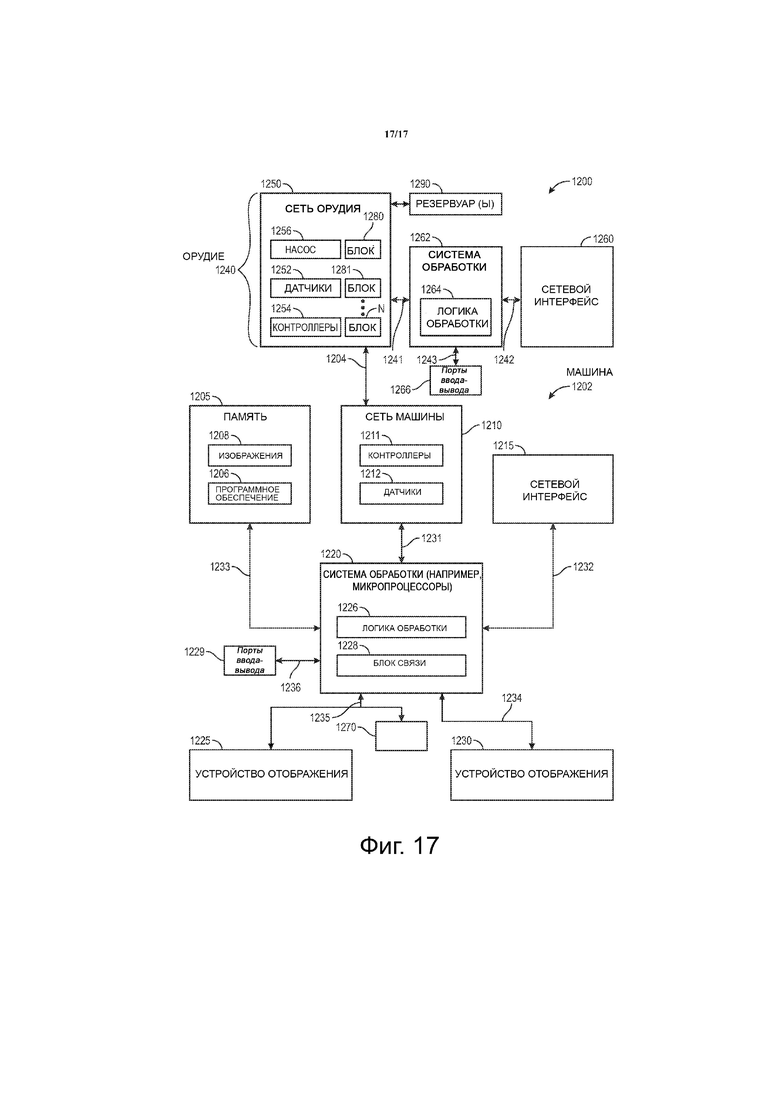
на фиг. 17 – пример системы 1200, включающей в себя машину 1202 (например, трактор, комбайн и т.д.) и орудие 1240 (например, сеялку, боковую штангу, культиватор, плуг, опрыскиватель, разбрасыватель, оросительный агрегат и т.д.) в одном из вариантов осуществления.
Краткое изложение сущности изобретения
В одном из вариантов осуществления, электронная система содержит устройство отображения для отображения данных и логику обработки, связанную с устройством отображения. Логика обработки сконфигурирована для определения коэффициента заполнения импульсов по меньшей мере одного датчика с целью определения потока продукта или частиц через продуктопровод сельскохозяйственного орудия и определения количества продукта или частиц, проходящих через продуктопровод сельскохозяйственного орудия, исходя из коэффициента заполнения импульсов хотя бы одного датчика.
Подробное описание изобретения
Все источники, цитируемые в данном документе, включены в настоящий документ во всей их полноте посредством ссылки. Однако в случае противоречия между определением, приведенным в настоящем раскрытии, и определением, приведенным в цитируемом источнике, настоящее раскрытие имеет преимущественную силу.
На фиг. 1 показана типичная пневматическая сеялка 100. Пневматическая сеялка 100 включает в себя тележку 110 и раму 120. Тележка 110 имеет бункер 111 и бункер 112 для хранения семян и удобрений соответственно. Основной продуктопровод 116 соединен с вентилятором 113 для транспортировки семян и удобрений, поступающих от дозатора 114 и дозатора 115 соответственно. Основной продуктопровод 116 подает семена и удобрения в коллекторную башню 123. Семена и удобрения распределяются с помощью коллекторной башни 123 по вторичным продуктопроводам 122 к сошникам 121.
Хотя нижеприведенное описание относится к управлению коллекторной башней 123 одной секции пневматической сеялки 100, такая же система может применяться в каждой секции.
На фиг. 2 изображена коллекторная башня 123. Коллекторная башня 123 имеет основной продуктопровод 116, подающий семена и, при необходимости, удобрения в потоке воздуха. Вибрационное решето 125 для семян/удобрений имеет размер ячеек, предотвращающий прохождение семян и/или удобрений. Семена/удобрения попадают в выпускные отверстия (или выпускные порты) 124 и поступают во вторичные продуктопроводы 122. Над решетом 125 находится башня 126, в которой имеется клапан 127. Клапан 127 может быть клапаном любого типа, имеющим привод. В одном из вариантов осуществления клапан 127 представляет собой дроссельную заслонку. Клапан 127 приводится в действие приводом 128, который расположен на башне 126. Привод 128 находится в сигнальной связи с электрической системой 300 управления. При необходимости, к башне 126 крепится крышка 130, которая выполнена с возможностью поворота, чтобы закрывать башню 126, когда поток воздуха отсутствует. Когда воздух подается, крышка 130 поднимается потоком воздуха, проходящего через башню 126, а когда воздух не подается, крышка 130 закрывает башню 126.
В одном из вариантов осуществления, который показан на фиг. 2, коллекторная башня 123 дополнительно включает в себя датчик 140 давления, расположенный в башне 123 коллектора. В другом варианте осуществления, датчик 140 давления расположен по меньшей мере в одном из продуктопроводов 122. Датчик 140 давления находится в сигнальной связи с электрической системой 300 управления. Это позволяет обеспечивать замкнутую петлю управления клапаном 127. В другом варианте осуществления, электрическая система 300 управления измеряет давление с помощью датчика 140 давления в коллекторной башне 123 и датчика 140 давления во вторичном продуктопроводе 122 и вычисляет разность между показаниями каждого датчика давления. Электрическая система 300 управления может осуществлять управление в зависимости от разности давлений.
В другом варианте осуществления, который показан на фиг. 3, имеется первый датчик 150-1 частиц и второй датчик 150-2 частиц, расположенные последовательно по меньшей мере в одном продуктопроводе 122. Первый датчик 150-1 частиц и второй датчик 150-2 частиц могут размещаться индивидуально или в виде составных частей единого блока. Первый датчик 150-1 частиц и второй датчик 150-2 частиц располагаются на таком расстоянии друг от друга, чтобы форма волны, измеренная на первом датчике 150-1 частиц, дублировалась на втором датчике 150-2 частиц. По мере продвижения семян через пневматическую сеялку, они не будут все время сохранять равномерное распределение. В выбранном поперечном сечении может быть одно, два, три, четыре, пять или более семян одновременно. По мере того, как семена перемещаются на некоторое расстояние, распределение семян в каждой группе может расширяться или сжиматься. На небольшом расстоянии группировка будет оставаться неизменной. Каждая группа семян будет генерировать различную форму волны в датчике частиц. Формы сигналов от множества групп будут создавать некую картину в первом датчике 150-1 частиц. Когда эта картина затем обнаруживается вторым датчиком 150-2 частиц, разница во времени между каждым из этих измерений затем делится на расстояние между первым датчиком 150-1 частиц и вторым датчиком 150-2 частиц для определения скорости перемещения семян/удобрений во вторичном продуктопроводе 122. Зная скорость, электронная система 300 управления может активировать привод 128 для изменения количества воздуха, выходящего из башни 126, для изменения скорости перемещения семян/удобрений во вторичном продуктопроводе 122.
Примером датчика частиц является датчик Wavevision компании Precision Planting LLC, который описан в патенте США №6208255. Первый датчик 150-1 частиц и второй датчик 150-2 частиц находятся в сигнальной связи с электрической системой 300 управления. Это позволяет обеспечить замкнутую петлю управления клапаном 127.
Хотя на чертеже показаны и датчик 140 давления, и датчики 150-1, 150-2 частиц, для управления с обратной связью необходим только один датчик.
В другом варианте осуществления, который проиллюстрирован на фиг. 2, может использоваться по меньшей мере один клапан (например, клапан 160), расположенный в каждом выпускном отверстии (или выпускном порту) 124 и приводимый в действие приводом 161, находящимся в сигнальной связи с электрической системой 300 управления. Каждым приводом (или приводами) 161 можно управлять индивидуально с целью дальнейшего регулирования потока посредством по меньшей мере одного клапана в каждом вторичном продуктопроводе 122. Каждый вторичный продуктопровод 122 может содержать по меньшей мере один клапан (например, 750-1, 750-2) и соответствующий привод (например, 724-1, 724-2), как показано на фиг. 7. Это позволяет обеспечить точное управление каждым вторичным продуктопроводом 122 отдельно от других вторичных продуктопроводов 122. Датчик давления 140, ультразвуковой датчик скорости или датчики 150-1, 150-2 частиц в каждом вторичном продуктопроводе 122 могут обеспечивать измерения для управления каждым приводом 161. В одном из вариантов осуществления, датчик 150-1, 150-2 частиц может быть любым датчиком с выходным сигналом, имеющим продолжительность, пропорциональную времени, в течение которого датчик блокируется частицей (частицами), проходящими через датчик.
Один из вариантов осуществления электрической системы 300 управления схематично показан на фиг. 4A. В электрической системе 300 управления монитор 310 находится в сигнальной связи с приводом 128, приводом 161, датчиком 140 давления, датчиком 170 скорости текучей среды и датчиками 150-1, 150-2 частиц. Следует понимать, что монитор 310 представляет собой электрический контроллер. Монитор 310 включает в себя логику 316 обработки (например, центральный процессор (ЦП) 316), память 314 и, в ряде случаев, графический интерфейс 312 пользователя, который позволяет пользователю просматривать и вводить данные в монитор 310. Монитор 310 может относиться к типу, описанному в патенте США № 8386137. Например, монитор 310 может быть системой мониторинга сеялки, которая включает в себя визуальный дисплей и интерфейс пользователя, предпочтительно графический интерфейс пользователя с сенсорным экраном. Графический интерфейс пользователя с сенсорным экраном предпочтительно устанавливается в корпусе, в котором также находятся микропроцессор, память и другие применимые аппаратные средства и программное обеспечение для приема, хранения, обработки, связи, отображения и выполнения различных деталей и функций. Система мониторинга сеялки в предпочтительном варианте осуществления сопрягается и/или взаимодействует с различными внешними устройствами и датчиками.
Альтернативная электрическая система 350 управления, показанная на фиг. 4B, включает в себя модуль 320. Модуль 320 принимает сигналы от датчика 140 давления, датчика 171 скорости текучей среды и датчиков 150-1, 150-2 частиц, которые могут подаваться на монитор 310 для вывода на графическом интерфейсе 312 пользователя. Модуль 320 также может подавать управляющие сигналы на привод 128 и привод 161 на основе ввода оператора в монитор 310.
В режиме управления с обратной связью монитор 310 принимает сигнал от датчика давления, датчика скорости текучей среды и/или датчиков 150-1, 150-2 частиц. Монитор 310 использует сигнал датчика давления, сигнал датчика скорости текучей среды и/или сигналы датчиков частиц, чтобы установить выбранное положение привода 128 клапана 127 регулирования количества воздуха, выходящего из башни 126. Монитор 310 посылает сигнал на привод 128, чтобы произвести это изменение. Это, в свою очередь, регулирует расход воздуха во вторичных продуктопроводах 122 подачи семян/удобрений в борозду с соответствующей силой и/или скоростью, исключающей выскакивание семян/удобрений из борозды.
В одном из примеров, модуль 320 располагается на орудии или тракторе. Модуль 320 принимает данные от датчиков, расположенных на орудии. Модуль обрабатывает данные от датчиков для выполнения этапов описанных здесь способов или отправляет данные от датчиков в логику обработки для выполнения этапов описанных здесь способов.
Помимо измерения давления или скорости частиц, можно измерять скорость текучей среды (воздуха). Измерять скорость текучей среды может ультразвуковой датчик скорости.
На фиг. 5 показан ультразвуковой датчик для обнаружения потока через продуктопровод или трубу в одном из вариантов осуществления. Ультразвуковой датчик 500 располагают в продуктопроводе 522 (например, во вторичном продуктопроводе) или трубе 522 или в непосредственной близости от продуктопровода 522 или трубы 522. Датчик (или ультразвуковой расходомер) использует акустические волны или колебания определенной частоты (например, более 20 кГц, приблизительно 0,5 МГц). Датчик 500 использует либо смачиваемые, либо не смачиваемые преобразователи, расположенные по периметру продуктопровода или трубы для взаимодействия ультразвуковой энергии с текучей средой, протекающей по продуктопроводу или трубе. В одном из примеров, датчик работает на эффекте Допплера, при этом преобразователь 504, имеющий передатчик, излучает луч 530. Передаваемая частота луча 530 изменяется линейно при отражении от частиц и пузырьков жидкости, двигающихся внутри продуктопровода 522, чтобы генерировать допплеровское отражение 540, которое принимается приемником преобразователя 502. Сдвиг частоты между частотой луча 530 и частотой отражения 540 может быть напрямую связан с расходом текучей среды (например, жидкости, воздуха), движущейся в направление 510 потока. Сдвиг частоты линейно пропорционален скорости материалов в продуктопроводе или трубе и может использоваться для генерации аналогового или цифрового сигнала, который пропорционален расходу текучей среды.
При известном внутреннем диаметре (D) продуктопровода 522 или трубы 522 объемный расход (например, галлонов в минуту) равен K*Vf*D2. В этом примере Vf – это скорость потока, а K – постоянная величина, зависящая от единиц измерения Vf и D.
На фиг. 6 показан ультразвуковой датчик (например, расходомер на основе измерения времени прохождения) для определения расхода через продуктопровод или трубу в одном из вариантов осуществления. Расходомеры на основе измерения времени прохождения (например, расходомер времени пролета, расходомер времени прохождения) измеряют разницу во времени прохождения между импульсами, передаваемыми по одному и тому же пути в направлении потока и против направления потока текучей среды (например, жидкости, воздуха). Датчик 600 имеет корпус 650 с преобразователями 602 и 604. Датчик 600 расположен на линии 622 (например, на вторичном продуктопроводе) или трубе 522, или в непосредственной близости от продуктопровода 622 или трубы 522.
В одном из примеров, показанном на фиг. 6, датчик работает с преобразователями 602 и 604. Каждый преобразователь, имеющий передатчик и приемник, поочередно передает и принимает импульсы ультразвуковой энергии в виде лучей 630 и 640 под углом θ (например, приблизительно 45 градусов). Разница во времени прохождения импульсов в восходящем и нисходящем направлениях (Tu-Td), измеренная на одном и том же пути, может использоваться для расчета расхода через продуктопровод или трубу:
V = K*D/sin2θ*l/(T0-τ)2ΔT
V – средняя скорость текущей текучей среды, K – постоянная величина, D – диаметр продуктопровода или трубы, θ – угол падения ультразвуковых импульсов волн, T0 – время прохождения при нулевом расходе, ΔT = T2-Tl, T1 – время прохождения импульсов волн (луч 630) от преобразователя 602 к преобразователю 604, T2 – время прохождения импульсов волн (луч 640) от преобразователя 604 к преобразователю 602, а τ – длительность передачи импульсов волн через продуктопровод 622 или трубу. Скорость потока прямо пропорциональна измеренной разности времени прохождения в восходящем и нисходящем направлениях. Объемный расход определяется путем умножения площади поперечного сечения продуктопровода или трубы на скорость потока. Объемный расход может определяться с помощью поставляемого по желанию покупателя преобразователя 690 на базе микропроцессора или электрической системы 300 или 350 управления. Текучая среда, проходящая по пути 610 потока, должна быть приемлемым проводником звуковой энергии.
Как рассматривалось выше, датчики семян или удобрений на сельскохозяйственном орудии обычно являются оптическими датчиками. Когда частица (семя или удобрение) проходит через оптический датчик, световой луч прерывается, и вследствие этого происходит обнаружение частицы. Частота обнаружения этих частиц может использоваться для определения популяции растений, если частота достаточно низкая. Однако для сельскохозяйственных культур с более высоким расходом, таких как пшеница, или для удобрений, типичные оптические датчики размером 25 мм или 32 мм не имеют достаточно большой площади поперечного сечения для обнаружения отдельных частиц, что делает подсчет частиц с помощью этих датчиков ненадежным и неточным. По этой причине оптические датчики, которые используются на орудиях с более высокими частотами обнаружения (например, на пневматических сеялках), называют датчиками засорения, поскольку эти датчики могут сообщать только о том, обнаруживают ли они частицы или нет.
Датчики засорения, используемые в пневматических сеялках, не дают достаточного количества импульсов от семян для правильного определения количества семян на акр. Пневматические сеялки используют метрику "распределение семян", которая отображает популяцию без единиц измерения. Это может быть проблемой, если норма высева слишком высока, а падение напряжения на датчике происходит не так часто, что приводит к уменьшению зарегистрированной популяции.
Однако для данного датчика и типа частицы (например, кукурузы, пшеницы, сорго, ячменя, овса, канолы, удобрения и т.д.) можно измерять соотношение (как описано ниже) между временем, когда оптический датчик обнаруживает частицу, и фактической частотой частиц. Если это соотношение может быть выведено для неких частиц, измеренный коэффициент заполнения импульсов оптического датчика можно использовать для вычисления оценочной частоты частиц, которая затем может использоваться для вычисления оценочной популяции на основе других известных переменных, таких как скорость движения по рядкам, расстояние между рядками.
Коэффициент заполнения импульсов оптического датчика расхода можно использовать для вычисления расчетной частоты продукта или частиц, которая затем может использоваться для вычисления расчетной популяции на основе других известных переменных, таких как скорость движения по рядкам или расстояние между рядками.
Зная коэффициент заполнения импульсов датчика, можно выполнять другие математические операции для получения полезных метрик, таких как "относительная частота", которые пользователь (например, оператор, фермер) может использовать для сравнения количества частиц, попадающих в каждый рядок с орудия, и выявления механических проблем, вызывающих колебания от рядка к рядку.
Фиг. 8 иллюстрирует блок-схему одного из вариантов осуществления способа 800 использования коэффициента заполнения импульсов для определения метрик частиц и популяции. Способ 800 выполняется с помощью логики обработки, которая может содержать аппаратные средства (схемы, специализированную логику и т.д.), программное обеспечение (например, выполняемое компьютерной системой общего назначения, специализированной машиной или устройством) или их комбинацию. В одном из вариантов осуществления, способ 800 выполняется посредством логики обработки (например, логики 316 обработки) электронной системы управления (например, электронной системы 300 управления, электронной системы 350 управления, машины, устройства, монитора 310, имеющего ЦП 316, модуля 320, устройства отображения, устройства пользователя, самоуправляемого устройства, самоходного устройства и т.д.). Электронная система управления или система обработки (например, система 1220, 1262 обработки) выполняет инструкции программного приложения или программы с использованием логики обработки. Программное приложение или программа может инициироваться электронной системой управления или системой обработки. В одном из примеров монитор или устройство отображения принимает пользовательский ввод и предоставляет персонифицированное отображение этапов способа 800.
На этапе 802 в электронной системе управления или системе обработки инициируется и отображается на мониторе или устройстве отображения в качестве интерфейса пользователя приложение программного обеспечения. Электронная система управления или система обработки может быть интегрирована или связана с машиной, которая выполняет проход применения (например, посев, обработку почвы, внесение удобрений). В качестве альтернативы, система обработки может быть интегрирована с устройством (например, дроном, устройством захвата изображений), связанным с машиной, которое захватывает изображения во время прохода применения.
На этапе 804 способ измеряет коэффициент заполнения импульсов по меньшей мере одного датчика (например, оптических датчиков, датчиков 140, 150-1, 150-2, 171, преобразователей 502, 504, 602, 604), чтобы контролировать поток продукта или частиц через продуктопровод сельскохозяйственного орудия. Упомянутый продуктопровод доставляет продукт или частицы на сельскохозяйственное поле.
На этапе 806 способ измеряет количество продукта или частиц, протекающих через продуктопровод сельскохозяйственного орудия, на основе коэффициента заполнения импульсов по меньшей мере одного датчика. На этапе 808 способ отображает коэффициент заполнения импульсов по меньшей мере одного датчика в привязке к определенным с помощью системы GPS местоположениям, чтобы сформировать пространственную карту сельскохозяйственного поля.
На этапе 810 монитор или устройство отображения отображает на интерфейсе пользователя метрику, которая показывает средний, максимальный и минимальный коэффициент заполнения импульсов по меньшей мере одного датчика орудия. На этапе 812 монитор или устройство отображения отображает на интерфейсе пользователя метрику, которая показывает диапазон (например, от максимального до минимального значения коэффициента заполнения импульсов) коэффициента заполнения импульсов по меньшей мере одного датчика орудия.
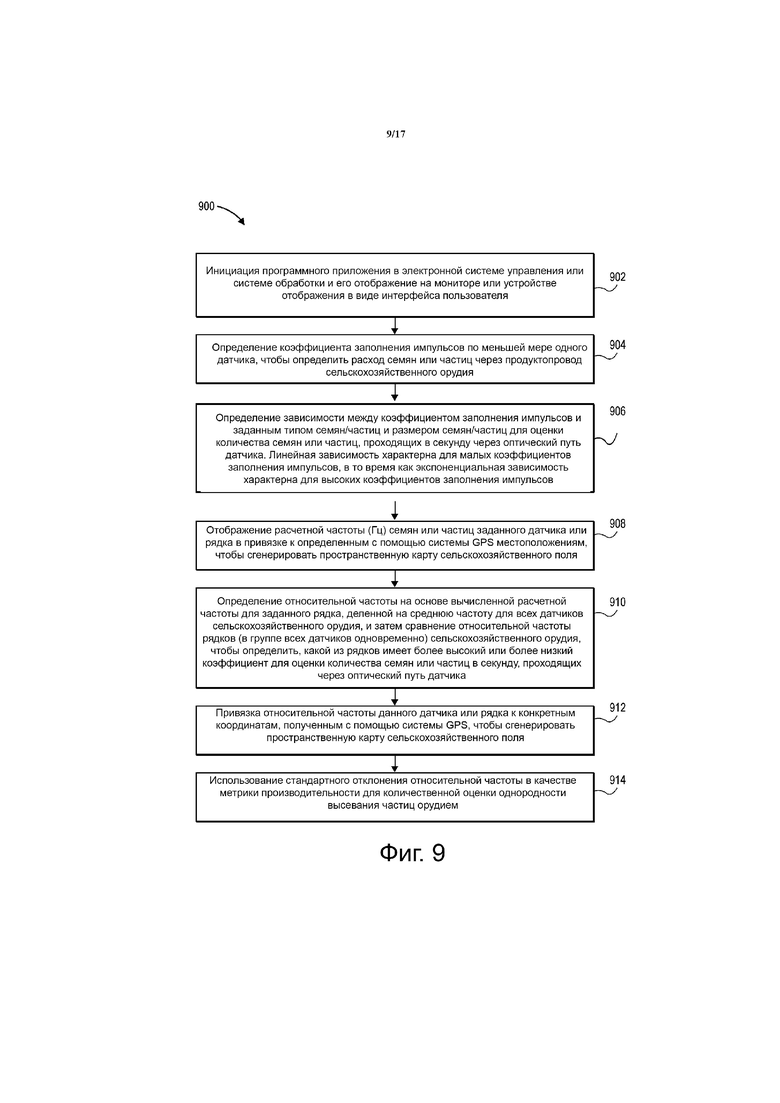
На фиг. 9 показана блок-схема одного из вариантов осуществления способа 900 использования коэффициента заполнения импульсов для оценки метрик частоты частиц. Способ 900 выполняется с помощью логики обработки, которая может содержать аппаратные средства (схемы, специализированную логику и т.д.), программное обеспечение (например, выполняемое компьютерной системой общего назначения или специализированной машиной, или устройством) или их комбинацию. В одном из вариантов осуществления, способ 900 выполняется посредством логики обработки (например, логики 316 обработки) электронной системы управления (например, электронной системы 300 управления, электронной системы 350 управления, машины, устройства, монитора 310, имеющего ЦП 316, модуля 320, устройства отображения, устройства пользователя, самоуправляемого устройства, самоходного устройства и т.д.). Электронная система управления или система обработки (например, система 1220, 1262 обработки) выполняет инструкции программного приложения или программы в соответствии с логикой обработки. Программное приложение или программа может быть инициирована электронной системой управления. В одном из примеров монитор или устройство отображения принимает пользовательский ввод и обеспечивает персонифицированное отображение этапов способа 900.
На этапе 902 запускается программное приложение, которое отображается на мониторе или устройстве отображения в виде пользовательского интерфейса. Электронная система управления или система обработки могут быть интегрированы или связаны с машиной, которая выполняет проход применения (например, посев, обработку почвы, внесение удобрений). В качестве альтернативы, электронная система управления или система обработки могут быть интегрированы с устройством (например, дроном, устройством захвата изображений), связанным с машиной, которое захватывает изображения во время прохода применения.
На этапе 904 способ определяет коэффициент заполнения импульсов по меньшей мере одного датчика (например, оптических датчиков, датчиков 140, 150-1, 150-2, 171, преобразователей 502, 504, 602, 604) для измерения расхода семян или частиц через продуктопровод семян или частиц сельскохозяйственного орудия. Упомянутый продуктопровод доставляет семена или частицы на сельскохозяйственное поле.
На этапе 906 способ определяет соотношение между коэффициентом заполнения импульсов и заданным типом семян или частиц и размером семян или частиц для оценки количества семян или частиц, проходящих за секунду через оптический путь датчика. Это расчетное значение количества семян или частиц в секунду называется расчетной частотой (Гц). В одном из примеров для низких коэффициентов заполнения импульсов (например, в диапазоне 0-25%, 0-60%) расчетная частота связана с коэффициентом заполнения импульсов линейной зависимостью. Линейное уравнение приведено ниже.
Y = m*x+b, где Y – расчетная частота семян или частиц, m – постоянное значение от 1 до 10, x – коэффициент заполнения импульсов хотя бы одного датчика, b – постоянная от 0,01 до 10.
В другом примере для высоких коэффициентов заполнения импульсов (например, в диапазоне 25-100%, 60-100%) расчетная частота связана с коэффициентом заполнения импульсов экспоненциальной зависимостью. Экспоненциальное уравнение приведено ниже.
Y = a*е^(bx), где Y – расчетная частота семян или частиц, a – постоянная от 5 до 100, x – коэффициент заполнения импульсов по меньшей мере одного датчика, b – постоянная от 0,01 до 10.
На фиг. 16 показан график зависимости расчетной частоты от коэффициента заполнения импульсов в одном из вариантов осуществления. Линейное уравнение 1610 используется для низких коэффициентов заполнения импульсов (0-50% или 0-25%), а экспоненциальное уравнение 1612 используется для более высоких коэффициентов заполнения импульсов (50-100%) для определения расчетной частоты исходя из коэффициента заполнения импульсов. Переход от линейного уравнения 1610 к экспоненциальному уравнению 1612 не обязательно происходит при каком-то конкретном коэффициенте заполнения импульсов. Переход может происходить в диапазоне изменения коэффициента заполнения импульсов от 0 до 100%. Например, в одном случае низкий коэффициент заполнения импульсов может составлять 0-25%, а высокий коэффициент заполнения импульсов может составлять от 25 до 100%. В другом варианте осуществления можно использовать нелинейное уравнение во всем диапазоне коэффициента заполнения импульсов 0-100%.
Возвращаясь к фиг. 9, на этапе 908 способ отображает расчетную частоту (Гц) семян или частиц для заданного датчика или рядка в привязке к определенным с помощью системы GPS местоположениям, чтобы сформировать пространственную карту сельскохозяйственного поля.
На этапе 910 способ определяет относительную частоту на основе вычисления расчетной частоты для данного рядка, деленной на среднюю частоту для всех датчиков сельскохозяйственного орудия, а затем сравнивает относительную частоту между рядками (по группе или по всем датчикам одновременно) сельскохозяйственного орудия, чтобы определить, какие рядки имеют более высокий или более низкий расход для оценки количества семян или частиц в секунду, проходящих через оптический путь датчика.
На этапе 912 способ отображает относительную частоту заданного датчика или рядка в конкретных местоположениях, определенных с помощью системы GPS, чтобы сгенерировать пространственную карту данного поля.
На этапе 914 способ использует стандартное отклонение относительной частоты в качестве метрики производительности для количественной оценки однородности подачи частиц в орудии.
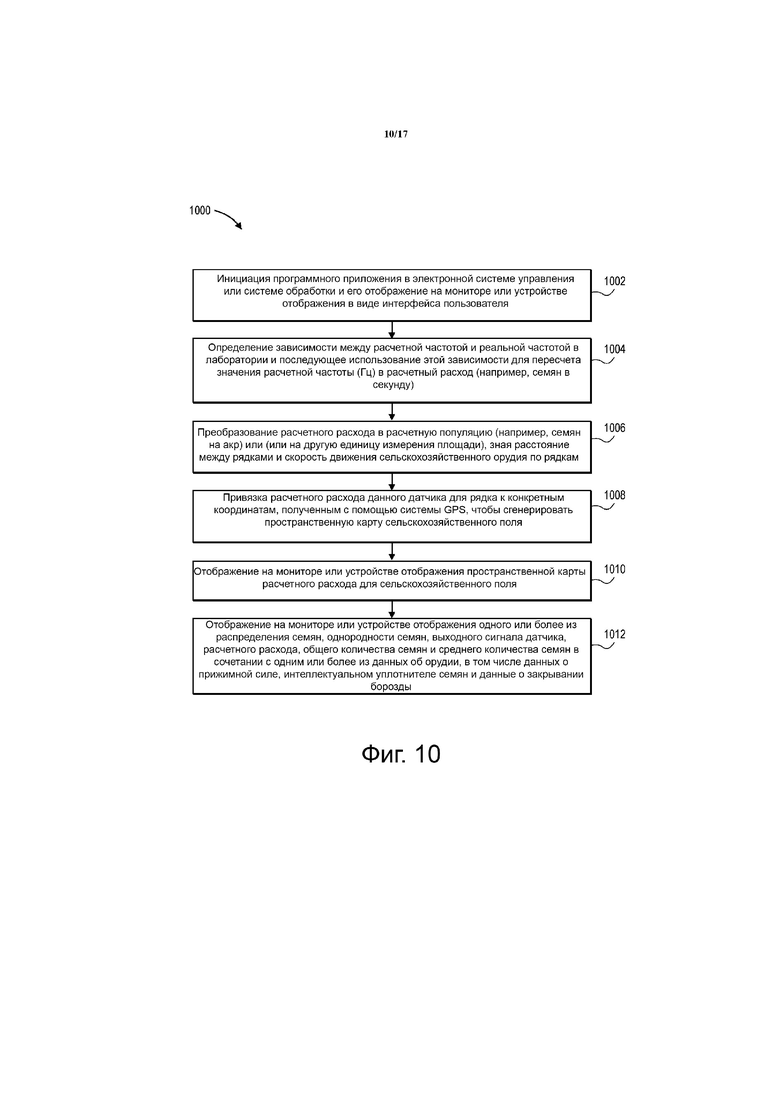
На фиг. 10 показана блок-схема одного из вариантов осуществления способа 1000 использования коэффициента заполнения импульсов для оценки метрик частоты частиц. Способ 1000 выполняется с помощью логики обработки, которая может содержать аппаратные средства (схемы, специализированную логику и т.д.), программное обеспечение (например, выполняемое компьютерной системой общего назначения или специализированной машиной, или устройством) или их комбинацию. В одном из вариантов осуществления, способ 1000 выполняется логикой обработки (например, логикой 316 обработки) электронной системы управления (например, электронной системы 300 управления, электронной системы 350 управления, машины, устройства, монитора 310, имеющего ЦП 316, модуля 320, устройства отображения, устройства пользователя, самоуправляемого устройства, самоходного устройства и т.д.). Электронная система управления или система обработки (например, система 1220, 1262 обработки) выполняет инструкции программного приложения или программы с использованием логики обработки. Программное приложение или программа может инициироваться электронной системой управления или системой обработки. В одном из примеров, монитор или устройство отображения принимает пользовательский ввод и обеспечивает персонифицированное отображение этапов способа 1000.
На этапе 1002 в электронной системе управления или системе обработки инициируется программное приложение, которое отображается на мониторе или устройстве отображения в виде интерфейса пользователя. Система обработки или электронная система управления может быть интегрирована или связана с машиной, которая выполняет проход применения (например, посев, обработку почвы, внесение удобрений). В качестве альтернативы, система обработки или электронная система управления может быть интегрирована с устройством (например, дроном, устройством захвата изображений), связанным с машиной, которое захватывает изображения во время прохода применения.
На этапе 1004 способ определяют соотношение между расчетной частотой и фактической частотой в лаборатории, и затем использует это соотношение для пересчета значения расчетной частоты (Гц) в расчетный расход (например, количество семян/сек). На этапе 1006 способ преобразует расчетный расход в расчетную популяцию (например, количество семян на акр или массу семян на акр (массу каждого семени, умноженную на количество семян)) или на другую единицу измерения площади, зная расстояние между рядками и скорость движения сельскохозяйственного орудия. На этапе 1008 способ привязывает расчетный расход данного датчика для рядка к конкретными местоположениям, определенным с помощью системы GPS, чтобы сгенерировать пространственную карту сельскохозяйственного поля. На этапе 1010 способ отображает на мониторе или устройстве отображения пространственную карту расчетного расхода для сельскохозяйственного поля. На этапе 1012 способ отображает на мониторе или устройстве отображения одно или более из распределения семян, однородности семян, выходного сигнала датчика, расчетного расхода, общего количества семян и среднего количества семян в сочетании с одним или несколькими данными орудия, включая данные о прижимном усилии, данные тестирования почвы орудием (например, данные о влажности почвы, данные об органических веществах, данные о температуре почвы) и данные о закрытии борозды.
На фиг. 11 показан монитор или устройство отображения, имеющее интерфейс 1101 пользователя с персонифицированными сельскохозяйственными параметрами, в том числе, с данными о распределении семян, в одном из вариантов осуществления. Инициированное программное приложение (например, полевое приложение) электронной системы управления или системы обработки генерирует интерфейс 1101 пользователя, который отображается на мониторе или устройстве отображения.
Программное приложение может предоставлять различные области отображения, выбираемые пользователем. В одном из примеров, области отображения включают в себя стандартную опцию 1102, опцию 1104 метрик и опцию 1106 большой карты для управления размером отображаемой карты в области поля. Кроме того, в одном из примеров, области отображения включают в себя область однородности высева семян, имеющую выбираемую опцию 1110, область 1111 низких рядков и область 1112 высоких рядков. В области однородности высева семян отображается цифра, рассчитанная на основе стандартного отклонения значений области 1150 мини-карты информационной панели (dashboard minichart, DMC). В области 1111 низких рядков отображается наименьшая расчетная частота семян или частиц для высевающей секции, деленная на (среднюю расчетную частоту семян или частиц * 100 для всех высевающих секций) сельскохозяйственного орудия. В области 1112 высоких рядков отображается наивысшая расчетная частота семян или частиц для высевающей секции, деленная на среднюю расчетную частоту семян или частиц * 100 для всех высевающих секции сельскохозяйственного орудия.
Область 1150 DMC содержит нормализованные значения (например, 120, 100, 80) расчетной частоты семян или частиц для высевающей секции, деленные на среднюю расчетную частоту * 100 для всех высевающих секций. В одном из примеров среднее значение установлено на 100.
На фиг. 12 показан один из вариантов осуществления монитора или устройства отображения, имеющий интерфейс 1201 пользователя с персонифицированными сельскохозяйственными параметрами, включая информацию о башне сельскохозяйственного орудия. Инициированное программное приложение (например, полевое приложение) системы обработки генерирует интерфейс 1201 пользователя, который отображается на мониторе или устройстве отображения.
Программное приложение может предоставлять различные области отображения, выбираемые пользователем. В одном из примеров после выбора опции 1110 однородности высева семян на интерфейсе 1101 пользователя, генерируется интерфейс 1201 пользователя, содержащий информацию о башне. Информация о башне для каждой башни включает в себя выбираемые варианты башни, содержащие значения DMC из области 1250 и среднюю расчетную частоту семян или частиц в рядках башни, деленную на среднюю расчетную частоту всех рядков * 100 для башни.
Область 1250 DMC содержит нормализованные значения (например, 120, 100, 80) расчетной частоты семян или частиц для высевающей секции, деленной на среднюю расчетную частоту * 100 для всех высевающих секций. В одном из примеров среднее значение установлено на 100.
После выбора башни (например, башни 4), генерируется интерфейс 1301 пользователя, показанный на фиг. 13. Интерфейс 1301 пользователя содержит ту же информацию о башне для башни 4, которая показана на интерфейсе 1201 пользователя. Область 1350 DMC содержит нормализованные значения (например, 120, 100, 80) расчетной частоты семян или частиц для высевающей секции, деленной на среднюю расчетную частоту * 100 для высевающих секций башни 4. В одном из примеров среднее значение установлено на 100.
На фиг. 14 показан один из вариантов осуществления монитора или устройства отображения, имеющего интерфейс 1401 пользователя с персонифицируемыми сельскохозяйственными опциями, в том числе с модулем обработки данных о семенах, таким как интеллектуальный соединитель SmartConnector компании Precision Planting LLC, и с информацией об однородности высева семян сельскохозяйственным орудием. Инициированное программное приложение (например, полевое приложение) электронной системы управления или системы обработки данных генерирует пользовательский интерфейс 1401, который отображается на мониторе или устройстве отображения.
Программное приложение может предоставлять различные области отображения, выбираемые пользователем. В одном из примеров, область отображения интерфейса пользователя включает в себя информацию от датчиков обнаружения семян или частиц, проходящих через продуктопровод семян или частиц сельскохозяйственного орудия, информацию об однородности 1410 высева семян и об общем количестве 1420 семян. Однородность высева семян рассчитывается на основе расчетной частоты семян или частиц для высевающей секции (например, 1-11), деленной на среднюю расчетную частоту семян или частиц для всех высевающих секций. Общее количество семян указывает общее количество семян, обнаруженное датчиком за единицу времени для высевающей секции.
На фиг. 15 показан один из вариантов осуществления монитора или устройства отображения, имеющего интерфейс 1501 пользователя с персонифицируемыми сельскохозяйственными опиями, включая однородность высева семян. Инициированное программное приложение (например, полевое приложение) электронной системы управления или системы обработки генерирует интерфейс 1501 пользователя, который отображается на мониторе или устройстве отображения.
Программное приложение может предоставлять различные области отображения, выбираемые пользователем. В одном из примеров, области отображения включают в себя стандартную опцию 1502, опцию 1504 метрик и опцию 1506 большой карты для управления размером отображаемой карты в области поля. Кроме того, в одном из примеров, области отображения включают в себя область однородности высева семян, с возможностью выбора опции 1510, область 1511 низких рядков и область 1512 высоких рядков. Область 1510 однородности высева семян отображает стандартное отклонение популяции семян для всех рядков (например, расчетную частоту семян или частиц для высевающей секции, деленную на среднюю расчетную частоту семян или частиц для всех рядков * константу). Область 1550 мини-карты информационной панели (DMC) показывает расчетный расход 180 000, при этом половина значений больше 180 000, а половина значений меньше 180 000. Область 1511 отображения низких рядков отображает самую низкую однородность высева семян высевающей секции среди всех высевающих секций (например, расчетную частоту семян или частиц в высевающей секции, деленную на (среднюю расчетную частоту семян или частиц * 100 для всех высевающих секций)) сельскохозяйственного орудия. Область 1512 отображения высоких рядков отображает наивысшую однородность высева семян для всех рядков (например, расчетную частоту семян или частиц в высевающей секции, деленную на среднюю расчетную частоту семян или частиц * 100 для всех высевающих секций) сельскохозяйственного орудия. Область 1520 отображения выходных сигналов датчиков отображает средний коэффициент заполнения импульсов датчиков высевающих секций, низкий выходной сигнал 1521 датчика с самым низким коэффициентом заполнения импульсов датчика и высокий выходной сигнал 1522 датчика с самым высоким коэффициентом заполнения импульсов датчика. В одном из примеров датчик имеет первый уровень напряжения и второй уровень напряжения. Коэффициент заполнения импульсов рассчитывается на основе процента времени, в течение которого датчик выдает первый уровень напряжения (например, менее 1 В). Датчик переключается с первого уровня напряжения на второй уровень напряжения или наоборот при обнаружении семени или частицы, проходящей через оптический путь датчика.
В области 1530 отображения расчетного расхода отображается расчетная популяция семян с наименьшим расчетным расходом 1531 и с наибольшей расчетной популяцией 1532. Коэффициенты заполнения импульсов датчиков семян или частиц используется для вычисления расчетной частоты, затем расчетная частота используется для вычисления величины расхода.
В одном из вариантов осуществления расчетная частота частиц датчика может рассчитываться на основании одного или нескольких параметров, выбранных из измеренного коэффициента заполнения импульсов, типа частиц, размера частиц и формы частиц. В другом варианте осуществления расчетная частота частиц может оцениваться на основе эмпирически составленной справочной таблицы или подобранного уравнения зависимости частоты от коэффициента заполнения импульсов. В еще одном варианте осуществления расчетная частота частиц может оцениваться на основе индивидуальной калибровочной постоянной, определенной с помощью процедуры калибровки или с помощью калиброванного эталонного потока. В другом варианте осуществления расчетная калибровочная кривая зависимости частоты частиц от коэффициента заполнения импульсов может быть получена системой управления способом самообучения с течением времени. По мере набора большего количества данных, калибровочная кривая может корректироваться на основе этих данных. В еще одном варианте осуществления, отношение коэффициента заполнения импульсов к расчетной частоте частиц может первоначально характеризоваться фиксированным значением, основанным на номинальных эмпирических данных и свойствах частиц, а затем изменяться на скорректированное соотношение, основанное на измеренных (или полученных в результате самообучения) данных.
Монитор или устройство отображения также может отображать любой из параметров или метрик, рассматриваемых в данном документе (например, распределение семян, однородность высева семян, выходной сигнал датчика, расчетный расход, общее количество семян, среднее количество семян, популяция) в сочетании с одним или несколькими данными сельскохозяйственного орудия, включая данные об усилии прижима, данные от оборудования тестирования почвы (например, данные о влажности почвы, данные об органических веществах, данные о температуре почвы) и данные о закрытии борозды.
Примеры метрик включают в себя метрики высокого рядка, низкого рядка и среднего (для любого значения), популяцию (включая заданную норму популяции и фактическую норму популяции), поштучное разделение семян, пропуски, кратность, плавность хода (хорошая езда), хорошее распределение, прижимное усилие, контакт с землей, скорость и вакуум. На фиг. 5 и 6, прилагаемых к патентам США № 8078367, № 9955625 и 6070 539 и включенных в настоящее изобретение посредством ссылки, показаны примеры некоторых из таких метрик. Патент США № 8078367 и Патент США № 9955625 включены в настоящий документ посредством ссылки.
Примеры данных об оборудовании тестирования почвы можно найти в документе WO2019070617A1, который включен в настоящий документ посредством ссылки. На фиг. 20, 22, 45, 48, 50, 51, 52, 71 и 72 представлены примеры данных от оборудования для тестирования почвы (например, данных от устройства тестирования почвы), включающих в себя органические вещества, влажность почвы, температуру, глубину, компоненты почвы, хорошее распределение семян, влажность прорастания семян, пустоты, однородность влажности, изменчивость влажности, оценку среды прорастания всходов, оценку среды прорастания семян и оценку свойств среды прорастания семян. Примером оборудования для тестирования почвы является датчик SmartFirmer компании Precision Planting LLC.
Примеры информации о закрытии можно найти в международном патенте WO2017197274, PCT/US2018061388, поданном 15 ноября 2018 г., и в международном патенте PCT/US2019020452, поданном 2 марта 2019 г., которые включены в настоящий документ посредством ссылки.
На фиг. 17 показан пример системы 1200, которая включает в себя машину 1202 (например, трактор, комбайн и т.д.) и орудие 1240 (например, сеялку, боковую штангу, культиватор, плуг, опрыскиватель, разбрасыватель, оросительный агрегат и т.д.)) в одном из вариантов осуществления. Машина 1202 имеет систему 1220 обработки, память 1205, сеть 1210 машины (например, сеть контроллеров протокола последовательной шины (CAN), сеть ISOBUS и т.д.) и сетевой интерфейс 1215 для связи с другими системами или устройствами, в том числе с орудием 1240. Сеть 1210 машины включает в себя датчики 1212 (например, датчики скорости, оптические датчики), контроллеры 1211 (например, приемник GPS, радиолокационную станцию) для управления и мониторинга операций машины или орудия. Сетевой интерфейс 1215 может включать в себя по меньшей мере одно из приемопередатчика GPS, приемопередатчика WLAN (например, WiFi), инфракрасного приемопередатчика, приемопередатчика Bluetooth, Ethernet или других интерфейсов связи с другими устройствами и системами, включая орудие 1240. Сетевой интерфейс 1215 может быть интегрирован с сетью 1210 машины или быть отдельным от сети 1210 машины, как показано на фиг. 12. Порты ввода-вывода 1229 (например, порт диагностики/бортовой диагностики (OBD)) обеспечивают связь с другой системой или устройством обработки данных (например, с дисплеями, датчиками и т.д.).
В одном из примеров, машина выполняет функции трактора, который соединен с орудием для выполнения посевных работ и обнаружения семян или частиц во время посадки. Данные о посеве и данные о семенах/частицах для каждой высевающей секции могут привязываться к данным о местоположении во время посева, чтобы иметь лучшее представление о посеве и о характеристиках семян/частиц для каждого рядка и области поля. Данные, связанные с внесением семян и характеристиками семян/частиц, могут отображаться по меньшей мере на одном из устройств 1225 и 1230 отображения. Устройства отображения могут интегрироваться с другими компонентами (например, с системой 1220 обработки, памятью 1205 и т.д.) для формирования монитора 300.
Система 1220 обработки может включать в себя один или несколько микропроцессоров, процессоров, систему на кристалле (интегральную схему) или один или несколько микроконтроллеров. Система обработки содержит логику 1226 обработки для выполнения программных инструкций одной или нескольких программ и блок 1228 связи (например, передатчик, приемопередатчик) для передачи и приема сообщений от машины через сеть 1210 машины или сетевой интерфейс 1215 или от орудия через сеть 1250 орудия или сетевой интерфейс 1260. Блок 1228 связи может быть интегрирован с системой обработки или быть отдельным от системы обработки. В одном из вариантов осуществления блок 1228 связи осуществляет обмен данными с сетью 1210 машины и сетью 1250 машины через порт диагностики/бортовой диагностики из имеющихся портов 1229 ввода-вывода.
Логика 1226 обработки, включающая в себя один или несколько процессоров или блоков обработки, может обрабатывать сообщения, полученные от блока 1228 связи, включая сельскохозяйственные данные (например, данные системы GPS, данные о посеве, характеристики почвы, любые данные, полученные от датчиков орудия 1240 и машины 1202, т.д.). Система 1200 включает в себя память 1205 для хранения данных и программ (программного обеспечения 1206) для выполнения системой обработки. Память 1205 может хранить, например, программные компоненты, такие как прикладное программное обеспечение для посева или программное обеспечение для анализа семян/частиц и приложений для посева для выполнения операций настоящего раскрытию, или любое другое программное приложение или модуль, изображения (например, захваченные изображения сельскохозяйственных культур, семян, почвы, борозд, комьев почвы, рядков и т.д.), предупреждения, карты и т.д. Память 1205 может быть любой известной формой машиночитаемого носителя для долговременного хранения данных, например, полупроводниковой памятью (например, флэш-памятью; SRAM; DRAM и т.д.) или энергонезависимой памятью, такой как жесткие диски или твердотельный накопитель. Система также может включать в себя подсистему ввода/вывода звука (на чертеже не показана), которая может включать в себя микрофон и динамик, например, для приема и отправки голосовых команд или подсистему аутентификации, или авторизации пользователя (например, по биометрии).
Система 1220 обработки осуществляет двунаправленную связь с памятью 1205, сетью 1210 машины, сетевым интерфейсом 1215, хедером 1280, устройством 1230 отображения, устройством 1225 отображения и портами 1229 ввода-вывода через каналы связи 1231-1236 соответственно. Система 1220 обработки может быть интегрирована с памятью 1205 или может быть отдельной от памяти 1205.
Устройства 1225 и 1230 отображения могут предоставлять визуальные интерфейсы для пользователя или оператора. Устройства отображения могут включать в себя контроллеры отображения. В одном из вариантов осуществления устройство 1225 отображения представляет собой портативное планшетное устройство или вычислительное устройство с сенсорным экраном, которое отображает данные (например, данные прикладной программы посева, захваченные изображения, локализованный слой карты, карты поля высокой четкости с различными измеренными данными о семенах/частицах, данные о посадке или данные о сборе урожая или другие сельскохозяйственные переменные или параметры, карты урожайности, предупреждения и т.д.) и данные, генерируемые программным приложением для анализа сельскохозяйственных данных, и данные, получаемые от пользователя или оператора для получения покомпонентного изображения области поля, мониторинга и контроля полевых операций. Операции могут включать в себя конфигурирование машины или орудия, предоставление данных, управление машиной или орудием, включая датчики и контроллеры, и хранение сгенерированных данных. Устройство 1230 отображения может быть дисплеем (например, дисплеем, предоставленным производителем оригинального оборудования (OEM)), отображающим изображения и данные для локализованного слоя карты, измеренные данные о семенах/частицах, данные о применении жидкостей, данные о посадке или сборе урожая, данные об урожайности, данные о прорастании семян, данные о среде посевного материала, данные о регулировке машины (например, сеялки, трактора, комбайна, опрыскивателя и т.д.), данные об управлении машиной и данные мониторинга машины или орудия (например, сеялки, комбайна, опрыскивателя и т.д.), подключенного к машине с помощью датчиков и контроллеров, расположенных на машине или орудии.
Кабинный модуль 1270 управления может включать в себя дополнительный модуль управления для подключения или отключения некоторых компонентов или устройств машины, или орудия. Например, если пользователь или оператор не в состоянии управлять машиной или орудием с помощью одного или нескольких устройств отображения, то модуль управления в кабине может содержать переключатели для выключения или отключения компонентов, или устройств машины или орудия.
Орудие 1240 (например, сеялка, культиватор, плуг, опрыскиватель, разбрасыватель, оросительный агрегат и т.д.) имеет сеть 1250 орудия, систему 1262 обработки, сетевой интерфейс 1260 и дополнительные порты 1266 ввода/вывода для связи с другими системами или устройствами, включая машину 1202. Сеть 1250 орудия (например, сеть контроллеров протокола последовательной шины (CAN), сеть ISOBUS и т.д.) включает в себя насос 1256 для перекачивания жидкости из резервуара (резервуаров) 1290 к устройствам 1280, 1281... N орудия, датчики 1252 (например, радиолокационную станцию, датчик электропроводности, электромагнитный датчик, датчик усилия, датчики скорости, датчики семян/частиц для обнаружения прохождения семян/частиц, датчики определения характеристик почвы или борозды, включающих в себя множество слоев почвы, отличающихся плотностью, глубиной перехода от первого слоя почвы ко второму слою исходя из плотности каждого слоя, величиной разницы в плотности слоев почвы, скоростью изменения плотности почвы по глубине, изменчивостью плотности почвы, шероховатостью поверхности почвы, толщиной остаточного мата, плотностью в слое почвы, температурой почвы, наличием семян, расстоянием между семенами, процентом укоренившихся семян и наличием остатков почвы, по меньшей мере один оптический датчик для определения по меньшей мере одного из органического вещества почвы, влажности почвы, текстуры почвы и катионообменной емкости почвы (CEC), датчики прижимного усилия, исполнительные клапаны, датчики влажности или датчики расхода для комбайна, датчики скорости для машины, датчики усилия прижатия семян для сеялки, датчики применения жидкости для опрыскивателя или датчики вакуума, датчики подъема и опускания навесного оборудования, датчики потока и т.д.), контроллеры 1254 (например, приемник GPS) и систему 1262 обработки для контроля и мониторинга операций орудия. Насос управляет и контролирует подачу жидкости к посевам или в почву, осуществляемую орудием. Жидкость может применяться на любой стадии роста сельскохозяйственных культур, в том числе в посадочной траншее при посеве семян, рядом с посадочной траншеей в отдельной канавке или в зоне, которая находится вблизи зоны посадки (например, между рядками проросших зерен кукурузы или соевых бобов).
Например, контроллеры могут представлять собой процессоры, связанные с множеством датчиков семян. Процессоры сконфигурированы для обработки данных (например, данных о внесении жидкости, данных от датчиков семян, данных о почве, данных о борозде или траншее) и передачи обработанных данных в систему 1262 или 1220 обработки. Контроллеры и датчики могут использоваться для мониторинга двигателей и приводов сеялки, включая систему привода с регулируемой скоростью для изменения популяций растений. Контроллеры и датчики также могут обеспечивать управление шириной полосы захвата и отключать отдельные рядки или секций сеялки. Датчики и контроллеры могут определять изменения в электродвигателе, который управляет каждым рядком сеялки индивидуально. Упомянутые датчики и контроллеры могут определять скорость подачи семян в продуктопроводе для каждого рядка сеялки.
Сетевой интерфейс 1260 может быть приемопередатчиком GPS, приемопередатчиком WLAN (например, WiFi), инфракрасным приемопередатчиком, приемопередатчиком Bluetooth, Ethernet или другим интерфейсом связи с другими устройствами и системами, включая машину 1202. Сетевой интерфейс 1260 может быть интегрирован с сетью 1250 орудия или может быть отдельным от сети 1250 орудия, как показано на фиг. 24.
Система 1262 обработки осуществляет двустороннюю связь с сетью 1250 орудия, сетевым интерфейсом 1260 и портами 1266 ввода-вывода через каналы 1241-1243 связи соответственно.
Орудие связано с машиной посредством проводной и, возможно, также беспроводной двунаправленной линии 1204 связи. Сеть 1250 орудия может связываться напрямую с сетью 1210 машины или через сетевые интерфейсы 1215 и 1260. Орудие также может физически соединяться с машиной для выполнения сельскохозяйственных операций (например, обнаружения семян/частиц, посева, сбора урожая, опрыскивания и т.д.).
Память 1205 может быть машинодоступным энергонезависимым носителем, на котором хранится один или несколько наборов инструкций (например, программное обеспечение 1206), реализующих любой один или несколько способов или функций, описанных в данном документе. Программное обеспечение 1206 также может находиться полностью или по меньшей мере частично в памяти 1205 и/или в системе 1220 обработки во время его выполнения системой 1200, при этом память и система обработки также представляют собой машинодоступный носитель данных. Программное обеспечение 1206 может дополнительно передаваться или приниматься по сети через сетевой интерфейс 1215.
В одном из вариантов осуществления, машинодоступный энергонезависимый носитель (например, память 1205) содержит исполняемые инструкции компьютерной программы, которые при выполнении системой обработки данных побуждают систему выполнять операции или осуществлять способы настоящего изобретения. Хотя машинодоступный энергонезависимый носитель (например, память 1205) показан в примерном варианте осуществления как единственный носитель, термин "машинодоступный энергонезависимый носитель" следует рассматривать как включающий в себя один носитель или несколько носителей (например, централизованную или распределенную базу данных и/или связанные кэш-памяти и серверы), которые хранят один или несколько наборов инструкций. Термин "машинодоступный энергонезависимый носитель" также должен рассматриваться как включающий в себя любой носитель, который способен хранить, кодировать или переносить набор инструкций для выполнения машиной и который побуждает машину выполнять один или несколько способов настоящего изобретения. Термин "машинодоступная энергонезависимая среда", соответственно, следует понимать как включающий в себя, но не ограничивающийся этим, твердотельные запоминающие устройства, оптические и магнитные носители и сигналы несущей частоты.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЛОКИ УПРАВЛЕНИЯ, УЗЛЫ, СИСТЕМА И СПОСОБ ДЛЯ ПЕРЕДАЧИ И ОБМЕНА ДАННЫМИ | 2017 |
|
RU2718991C1 |
| СИСТЕМЫ, СПОСОБЫ И УСТРОЙСТВА ВНЕСЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ ЖИДКОСТИ | 2016 |
|
RU2731510C2 |
| СПОСОБ И СИСТЕМЫ ДЛЯ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОЙ СКОРОСТИ ПРОДУКТА | 2020 |
|
RU2819435C2 |
| УСТРОЙСТВО, СИСТЕМЫ И СПОСОБЫ ПОДСЧЕТА ЧАСТИЦ | 2020 |
|
RU2811341C2 |
| ДАТЧИКИ ЗАДЕЛЫВАНИЯ СЕМЕННОЙ БОРОЗДЫ | 2017 |
|
RU2744801C2 |
| ДОПОЛНЕНИЕ МЕСТОПОЛОЖЕНИЯ ПО GPS И ВОСПРОИЗВЕДЕНИЕ ПРИ ПЕРЕБОЕ В РАБОТЕ | 2021 |
|
RU2818744C1 |
| КОМПЬЮТЕРИЗИРОВАННЫЙ СПОСОБ И СИСТЕМА ДЛЯ ПРИМЕНЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО ОРУДИЯ | 2021 |
|
RU2818807C1 |
| РАСПРЕДЕЛЕННЫЕ ДАННЫЕ ПО ГРУНТАМ | 2021 |
|
RU2820406C1 |
| АВТОМАТИЧЕСКИЕ ПАРТНЕРЫ ПО ПОЛЕВЫМ РАБОТАМ | 2021 |
|
RU2824084C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ВЕНТИЛЯЦИОННОЙ СИСТЕМЫ ПНЕВМАТИЧЕСКОЙ СЕЯЛКИ | 2018 |
|
RU2765500C2 |


Изобретение относится к способам и системам использования коэффициента заполнения импульсов датчиков для определения расхода семян или частиц в пневматической сеялке. Сущность заявленной системы состоит в том, что логика обработки сконфигурирована для определения коэффициента заполнения импульсов датчика с целью определения расхода продукта или частиц через продуктопровод сельскохозяйственного орудия и для определения количества продукта или частиц, протекающего через продуктопровод, на основе коэффициента заполнения импульсов по меньшей мере одного датчика. Сущность заявленного способа состоит в том, что определение расхода семян или частиц осуществляется при переключении датчика с первого уровня напряжения на второй уровень напряжения. Сущность заявленного энергонезависимого носителя состоит в том, что он содержит исполняемые инструкции для реализации заявленного способа оценки расхода семян или частиц. Техническим результатом изобретения является повышение точности определения расхода семян или частиц. 4 н. и 13 з.п. ф-лы, 17 ил.
1. Электронная система для определения расхода семян или частиц, включающая в себя устройство отображения для отображения данных; и логику обработки, связанную с устройством отображения, причем логика обработки сконфигурирована для определения коэффициента заполнения импульсов по меньшей мере одного датчика с целью определения расхода семян или частиц через продуктопровод семян или частиц сельскохозяйственного орудия и определения количества семян или частиц, протекающих через продуктопровод сельскохозяйственного орудия исходя из коэффициента заполнения импульсов по меньшей мере одного датчика, в которой по меньшей мере один датчик переключается с первого уровня напряжения на второй уровень напряжения на основе обнаружения семени или частицы, проходящей через оптический путь по меньшей мере одного датчика, а логика обработки выполнена с возможностью расчета коэффициента заполнения импульсов на основе процента времени, в течение которого по меньшей мере один датчик работает при первом уровне напряжения.
2. Электронная система по п. 1, в которой логика обработки сконфигурирована для отображения коэффициента заполнения импульсов по меньшей мере одного датчика в различных местоположениях, определенных с помощью системы GPS, для создания пространственной карты сельскохозяйственного поля; или сконфигурирована для отображения отклонения коэффициента заполнения импульсов каждого рядка сельскохозяйственного орудия от среднего коэффициента заполнения импульсов или медианного коэффициента заполнения импульсов в разных местоположениях, определенных с помощью системы GPS, чтобы сформировать пространственную карту сельскохозяйственного поля.
3. Электронная система по п. 1, в которой устройство отображения сконфигурировано для отображения на интерфейсе пользователя метрики, которая показывает средний, самый высокий и самый низкий коэффициент заполнения импульсов по меньшей мере одного датчика сельскохозяйственного орудия.
4. Электронная система по п. 1, в которой устройство отображения сконфигурировано для отображения на интерфейсе пользователя метрик, которые показывают разность коэффициента заполнения импульсов каждого рядка относительно среднего коэффициента заполнения импульсов или медианного коэффициента заполнения импульсов.
5. Электронная система по п. 3, в которой устройство отображения сконфигурировано для отображения на интерфейсе пользователя метрики, которая показывает диапазон изменения коэффициента заполнения импульсов по меньшей мере одного датчика сельскохозяйственного орудия.
6. Электронная система по п. 5, в которой устройство отображения сконфигурировано для отображения на интерфейсе пользователя данных орудия, включая данные о прижимном усилии, данные о почве или данные о закрытии борозды.
7. Электронная система по п. 1, в которой расчетная частота частиц по меньшей мере одного датчика вычисляется на основе одного или нескольких свойств, выбранных из измеренного коэффициента заполнения импульсов, типа частиц, размера и формы частиц.
8. Электронная система по п. 7, в которой расчетная частота частиц оценивается на основе эмпирически составленной справочной таблицы или подобранного уравнения зависимости частоты от коэффициента заполнения импульсов; или индивидуальной калибровочной постоянной, определенной с помощью процедуры калибровки или калиброванного эталона расхода.
9. Электронная система по п. 8, в которой расчетная калибровочная кривая зависимости частоты частиц от коэффициента заполнения импульсов строится электронной системой со временем в процессе самообучения.
10. Электронная система по п. 7 или 8, в которой в качестве первоначального соотношения коэффициента заполнения импульсов и расчетной частоты частиц используется фиксированное соотношение, основанное на номинальных эмпирических данных и свойствах частиц, а затем изменяется на скорректированное соотношение, полученное на основе измеренных данных.
11. Электронная система по п. 7 или 8, в которой расчетная частота семян или частиц используется для вычисления расчетной популяции семян или частиц на основе известных переменных, в том числе скорости движения по рядкам и расстояния между рядками на сельскохозяйственном поле.
12. Электрическая система для определения расхода семян или частиц, включающая в себя по меньшей мере один датчик для определения расхода семян или частиц в продуктопроводе сельскохозяйственного орудия; модуль для приема данных по меньшей мере от одного датчика; и электронную систему по п. 1, в которой логика обработки связана с модулем.
13. Реализуемый компьютером способ оценки расхода семян или частиц по меньшей мере для одного датчика, содержащий определение коэффициента заполнения импульсов по меньшей мере одного датчика с целью определения расхода семян или частиц через продуктопровод семян или частиц сельскохозяйственного орудия; и определение количества семян или частиц, протекающих через продуктопровод сельскохозяйственного орудия исходя из коэффициента заполнения импульсов по меньшей мере одного датчика, в котором по меньшей мере один датчик переключается с первого уровня напряжения на второй уровень напряжения на основе обнаружения семени или частицы, проходящей через оптический путь по меньшей мере одного датчика, а способ содержит расчет коэффициента заполнения импульсов на основе процента времени, в течение которого по меньшей мере один датчик работает при первом уровне напряжения.
14. Реализуемый компьютером способ по п. 13, дополнительно содержащий: отображение коэффициента заполнения импульсов по меньшей мере одного датчика для рядка сельскохозяйственного орудия в привязке к различным местоположениям, полученным с помощью системы GPS, чтобы создать пространственную карту сельскохозяйственного поля.
15. Реализуемый компьютером способ по п. 14, дополнительно содержащий отображение на мониторе или устройстве отображения пространственной карты расчетного расхода для сельскохозяйственного поля.
16. Реализуемый компьютером способ по п. 15, дополнительно содержащий отображение на мониторе или устройстве отображения одного или более из распределения семян, однородности семян, выходного сигнала датчика, расчетного расхода, общего количества семян или среднего количества семян в комбинации с одним или несколькими данными орудия, включая данные о прижимном усилии, данные от устройства тестирования почвы или данные о закрытии борозды.
17. Машинодоступный энергонезависимый носитель, содержащий исполняемые инструкции компьютерной программы, которые при выполнении системой обработки данных заставляют систему выполнять способ по любому из пп. 13-16.
| US 20160143211 A1, 26.05.2016 | |||
| US 20120036914 A1, 16.02.2012 | |||
| WO 2018204196 A1, 08.11.2018 | |||
| СПОСОБ КАЛИБРОВКИ ИМПУЛЬСНОГО НАПРЯЖЕНИЯ | 0 |
|
SU175130A1 |
| US 0008862339 B2, 14.10.2014. | |||
