Уровень техники
При работе с пневматическими сеялками, особенно при внесении продуктов с высокой нормой внесения, таких как мелкие семена (например, семян канолы, льна, проса, овса, пшеницы, ржи, ячменя и т.д.), продукт обычно течет по распределительным линиям к каждой высевающей секции практически непрерывным потоком. Отсюда следует понимать, что для обеспечения точного подсчета семян необходима система датчиков, которая способна обнаруживать и подсчитывать количество семян, одновременно проходящих через распределительные линии, при этом отличая семена от мусора, который может проходить через распределительные линии вместе с семенами.
На фиг. 1A представлен вид в перспективе варианта осуществления узла счетчика частиц с одной матрицей, расположенного в канале.
На фиг. 1B представлен вид в перспективе варианта осуществления узла счетчика частиц с двумя матрицами, расположенного в канале.
На фиг. 2A представлен вид в разрезе узла счетчика частиц с одной матрицей, если смотреть вдоль линий 2A-2A, показанных на фиг. 1А.
На фиг. 2B представлен вид в разрезе узла счетчика частиц с двумя матрицами, если смотреть вдоль линий 2B-2B, показанных на фиг. 1B.
На фиг. 3A представлен вид исходных сигналов напряжения от семян, показанных на фиг. 2A или 2B, проходящих через первую световую плоскость узла счетчика частиц.
На фиг. 3B представлен выходной скан нормированного выходного сигнала (Normalized Output Signal, NOS) после инвертирования и нормирования исходных сигналов напряжения, показанных на фиг. 3 А.
На фиг. 4 показана логическая блок-схема процесса идентификации начального и конечного состояний скана NOS, показанного на фиг. 3B, для определения и маркировки Основных Событий.
На фиг. 5 – логическая блок-схема процесса идентификации ячеек впадины в скане NOS, показанном на фиг. 3В.
На фиг. 6 – логическая блок-схема процесса разделения Основных Событий и маркировки разделенных событий.
На фиг. 7 – представление скана NOS, показанного на фиг. 3B, показывающего маркировку Основных Событий.
На фиг. 8A – представление разделения Основного События и маркировки разделенных Событий после выявления первого столбца впадины.
На фиг. 8B – представление дальнейшего разделения Основного События и дальнейшей маркировки разделенных Событий после выявления второго столбца впадины.
На фиг. 8C – представление дальнейшего разделения Основного События и дальнейшей маркировки разделенных Событий после выявления второго столбца впадины.
На фиг. 9 – логическая блок-схема процесса классификации Основных Событий.
На фиг. 10A – блок-схема, обобщающая процесс анализа Группы, полученной из световой плоскости одиночной матрицы, чтобы прийти к окончательному подсчету семян и скорости семян для вывода и отображения.
На фиг. 10B – блок-схема, обобщающая процесс сравнения Групп, полученных из каждой из световых плоскостей варианта осуществления с двумя матрицами, чтобы прийти к окончательному подсчету семян и скорости семян для вывода и отображения.
На фиг. 11 – вид сбоку варианта выполнения обычной пневматической сеялки.
На фиг. 12 – схематическое представление пневматической сеялки, показанной на фиг. 11, с узлами счетчика частиц, расположенными на распределительных линиях пневматической сеялки.
На фиг. 13 – вид сбоку высевающей секции сеялки точного высева с узлом счетчика частиц, расположенным на распределительной линии высевающей секции.
На фиг. 14 – схематическое представление варианта осуществления системы контроля, показывающее обмен данными с узлом счетчика частиц и другими компонентами, которые могут использоваться с пневматической сеялкой, показанной на фиг. 11, или сеялкой точного высева, показанной на фиг. 13.
На фиг. 15 – вариант осуществления процесса настройки системы контроля, управления пневматической сеялкой или сеялкой точного высева, а также хранения и отображения рабочих данных.
Описание изобретения
Ссылаясь на чертежи, на которых одинаковыми ссылочными позициями обозначены одинаковые или соответствующие компоненты на нескольких видах, на фиг. 1A представлен увеличенный вид в перспективе одного из вариантов осуществления узла 200A счетчика частиц с одной матрицей, расположенного на участке трубы или канала 202, через который проходят частицы. На фиг. 2A показан вид в разрезе счетчика частиц 200A и канала 202, если смотреть вдоль линий 2A-2A, показанных на фиг. 1А.
На фиг. 1B показа увеличенный вид в перспективе одного из вариантов осуществления узла 200B счетчика частиц с двумя матрицами, расположенного на участке трубы или канала 202, через который проходят частицы. На фиг. 2B показан вид в разрезе счетчика 200B частиц и канала 202, если смотреть вдоль линий 2B-2B, показанных на фиг. 1B.
На протяжении всего этого описания ссылочная позиция 200 используется для общего обозначения узла 200A или 200B счетчика частиц, если конкретное описание не относится только к одному из вариантов осуществления, и в этом случае ссылочная позиция 200A будет использоваться при рассмотрении только варианта осуществления с одной матрицей, а ссылочная позиция 200B будет использоваться при рассмотрении только варианта осуществления с двумя матрицами.
Следует понимать, что частицы могут переноситься воздушным потоком через канал 202 или могут падать через канал 202 под действием силы тяжести. Например, как показано на фиг. 11 и 12, узел 200 счетчика частиц может располагаться на распределительной линии 58 пневматической сеялки 10 (рассматриваемой ниже) или, как показано на фиг. 13, на семяпроводе 332 высевающей секции сеялки 300 точного высева (рассматриваемой ниже). В таких применениях узел 200 счетчика частиц используется для обнаружения и подсчета проходящих семян. В некоторых пневматических сеялках семена и удобрения (или другие сельскохозяйственные материалы) проходят через распределительные линии 58 вместе, и узел 200 счетчика частиц может отличать семена от других сельскохозяйственные материалов, так что учитываются только семена. Узел счетчика частиц может также различать семена и грязь или другой мусор, проходящий через распределительные линии 58 пневматической сеялки 10 или семяпровод 332 сеялок 300 точного высева, поэтому учитываются только семена. Кроме того, в таких применениях узел 200 счетчика частиц может использоваться для классификации частиц, чтобы различать "хорошие семена" и фрагменты семян, чтобы таким образом подсчитывать только "хорошие семена", которые, как ожидается, прорастут. Хотя пневматические сеялки и сеялки точного высева являются двумя типичными примерами применения узла 200 счетчика частиц, следует понимать, что узел 200 счетчика частиц может использоваться в любом другом сельскохозяйственном, промышленном или коммерческом применении, где желательно подсчитывать частицы, проходящие через трубу или канал для обнаружения и подсчета только определенных типов частиц, проходящих через трубу или канал.
В варианте осуществления узла 200A счетчика частиц с одной матрицей, показанном на фиг. 1A и 2A, поперек канала 202 создается одна световая плоскость 210-1. Одиночная световая плоскость 210-1 создается матрицей 212-1 светодиодных излучателей, установленных внутри корпуса 214-1 излучателя, расположенного с одной стороны канала 202. На противоположной стороне канала 202 и непосредственно напротив матрицы 212-1 светодиодных излучателей расположена соответствующая приемная матрица 216-1, установленная внутри корпуса 218-1 приемника.
В варианте осуществления узла 200B счетчика частиц с двумя матрицами, показанном на фиг. 1B и 2B, поперек канала 202 формируются две отдельные световые плоскости 210-1, 210-2, причем световые плоскости 210-1, 210-2 смещены друг от друга в продольном направлении канала 202 на расстояние "D", так что частица будет последовательно проходить через первую световую плоскость 210-1, а затем через вторую световую плоскость 210-2. Каждая световая плоскость 210-1, 210-2 генерируется соответствующей матрицей 212-1, 212-2 светодиодных излучателей, причем каждая матрица установлена в соответствующем корпусе 214-1, 214-2 излучателя, расположенном на двух сторонах канала 202, ориентированных под углом 90 градусов относительно друг друга вокруг продольной оси 204 канала 202, чтобы обнаруживать прохождение частиц в трех измерениях. На противоположных сторонах канала 202 и непосредственно напротив каждой из соответствующих светодиодных матриц 212-1, 212-2 находится соответствующая приемная матрица 216-1, 216-2, причем каждая приемная матрица 216-1, 216-2 установлена внутри соответствующего корпуса 218-1, 218-2 приемника.
В любом из вариантов 200A, 200B осуществления матрицы, светодиодные матрицы 212-1, 212-2, соответственно, содержат ряд близко расположенных светодиодных излучателей 220, каждый из которых создает световой луч или световой канал 222 поперек ширины или диаметра канала 202. Соответствующие приемные матрицы 216-1, 216-2, сообразно обстоятельствам, содержат соответствующее количество близко расположенных фотодиодных приемников 224, которые принимают световые лучи или световые каналы 222 расположенного напротив светодиодного излучателя 220. В одном из вариантов осуществления фотодиодные приемники 224 и светодиодные излучатели 220 непосредственно выровнены друг с другом, так что линия между ними перпендикулярна каждому из фотодиодных приемников 224 и светодиодных излучателей 220. В других вариантах осуществления линии не перпендикулярны.
В обоих вариантах 200A, 200B осуществления первая матрица 212-1 светодиодов показана как имеющая 12 светодиодных излучателей 220, создающих световые лучи или световые каналы 222 (обозначенные C1-Cl2), проходящие поперек ширины или диаметра канала 202. В варианте 200B осуществления с двумя матрицами, вторая матрица 212-2 светодиодов также показана как имеющая 12 светодиодных излучателей, создающих световые лучи или световые каналы 222 (обозначенные C13-C24), проходящие поперек ширины канала 202 перпендикулярно световым каналам Cl-C12 первой матрицы 212-1 светодиодов. Каждая соответствующая приемная матрица 216-1, 216-2, сообразно обстоятельствам, показана как имеющая 12 соответствующих фотодиодов 224. Следует понимать, что можно использовать большее или меньшее количество светодиодных излучателей и фотодиодных приемников, располагая их с большими или меньшими интервалами. Следует также понимать, что в зависимости от конкретного применения могут использоваться светодиоды с более широкими или более узкими углами луча и разной интенсивностью света в зависимости от конкретного применения, в том числе в зависимости от ширины или диаметра канала 202 и размера проходящих через канал частиц, которые должны быть обнаружены, и от различных других факторов, очевидных специалистами в данной области техники. Исключительно в качестве примера, в приложениях для обнаружения семян, проходящих через распределительные линии 58 сеялки 10, подходящие светодиодные излучатели могут быть светодиодными излучателями SM1206NHC-IL производства компании Bivar, Inc., имеющими угол луча 30 градусов, разнесенными на 0,08 дюйма (0,2 см), а подходящими фотодиодами 224 могут быть фотодиоды TEMD7000X01 производства компании Vishay Intertechnology, Inc., разнесенными на 0,08 дюйма (0,2 см). В варианте 200B с двумя матрицами подходящее расстояние продольного смещения "D" между световыми плоскостями 210-1, 210-2 может составлять 0,125 дюйма (0,32 см), от 0,05 до 1 дюйма (от 0,13 до 2,5 см) или от 0,1 до 0,5 дюйма (от 0,2 см до 1,3 см).
На фиг. 2A и 2B представлен моментальный снимок группы семян S1-S5, проходящих через канал 202, такой как распределительная линия 58 пневматической сеялки 10. Следует понимать, что при применении пневматической сеялки семена переносятся воздушным потоком по распределительным линиям 58 с относительно высокой скоростью и, по существу, непрерывным потоком (особенно при посеве мелких семян с высокими дозами внесения, таких как семена канолы, льна, проса, овса, пшеницы, ржи, ячменя и т.д.), поэтому моментальный снимок группы семян на фиг. 2A или 2B предоставлен для простоты пояснения скана сигналов, показанного на фиг. 3A, генерируемых этой группой семян, проходящей через одиночную световую плоскость 210-1 или две световые плоскости 210-1, 210-2, и другие процессы, выполняемые для анализа сигналов с целью подсчета и классификации семян, как рассматривается ниже. Хотя нижеследующее описание относится к семенам с целью пояснения процесса, происходящего при применении пневматической сеялке или сеялки точного посева, следует понимать, что термин "семена" используется только в качестве примера, и поэтому термин "семена" следует понимать как взаимозаменяемый с термином частица.
Функционирование
Как известно из области техники, фотодиод использует световую энергию для генерирования электрического тока, при этом напряжение увеличивается пропорционально интенсивности света. Таким образом, следует понимать, что, когда частица проходит через световой канал 222, генерируемый светодиодным излучателем 220, совмещенный с ним фотодиод 224 на мгновение "затеняется", что приводит к падению выходного напряжения сигнала. После того, как частица пройдет через световой канал 222, так что световой канал окажется полностью разблокированным, выходной сигнал фотодиода 224 вернется к своей максимальной интенсивности.
Выходные сигналы фотодиодов 224 одной световой плоскости 210-1 или двух световых плоскостей 210-1, 210-2 принимаются контроллером 110 и сохраняются в памяти для дальнейшей обработки. Контроллер 110 может быть частью системы 100 контроля семян (рассматриваемой ниже). Контроллер 110 может располагаться в кабине трактора, тянущего пневматическую сеялку 10, или сеялку 300 точного посева, как описано ниже.
На фиг. 3A показан мгновенный снимок "исходных" сигналов напряжения (Vraw), генерируемых фотодиодами 224 и регистрируемых контроллером 110, когда группа семян S1-S5 проходит через первую световую плоскость 210-1 (то есть через каналы C1-C12). Контроллер 110 регистрирует выходные сигналы каждого из фотодиодов 224, связанных с каждым световым каналом 222, в последовательных ячейках данных в течение серии сканирований данных, при этом каждая из последовательных ячеек данных для каждого из световых каналов 222 расположенных параллельно (то есть в строках или столбцах). В примере, показанном на фиг. 3A, моментальный снимок содержит серию из 50 циклов сбора данных или сканов, при этом каждая строка соответствует одному циклу сбора данных или одному скану для каждого из световых каналов 222 (C1-C12), организованных в столбцы. Следует понимать, что выходные сигналы могут быть альтернативно организованы таким образом, что сканы данных организованы в последовательные столбцы, а световые каналы 222 организованы в строки. Только в качестве примера, данные могут собираться или сканироваться контроллером 110 с частотой 10 кГц, но могут собираться с более высокими или более низкими частотами в зависимости от размера и скорости прохождения частиц, которые должны быть обнаружены и подсчитаны. Хотя это и не показано, следует понимать, что для варианта 200B осуществления с двумя матрицами аналогичный набор исходных данных о напряжении будет генерироваться и собираться контроллером 110, когда семена S1-S5 проходят через вторую световую плоскость 210-2 (т.е. через каналы C13-C24), ориентированные под углом 90 градусов к первой световой плоскости 210-1.
Процесс нормирования данных
Как только сигналы Vraw собраны и сохранены в памяти контроллера 110, контроллер 110 запускает программу 101 инвертирования и "нормирования" сигналов Vraw до значений от 0 до 1 (без единиц измерения). На фиг. 3B представлен тот же мгновенный снимок, что и на фиг. 3A, после того, как сигналы Vraw были инвертированы и нормированы с использованием описанного ниже процесса, и в дальнейшем называются "нормированным выходным сигналом" или "NOS". Сигналы Vraw инвертируются и нормируются таким образом, что, когда канал 222 света имеет максимальную интенсивность света (т.е. не заблокирован проходящим семенем), значение сигнала равно 0. Когда световой канал 222 имеет самую низкую интенсивность света (то есть полностью заблокирован проходящим семенем), значение сигнала равно 1. Т.е. промежуточные значения сигнала от 0 до 1 свидетельствуют о том, что световой канал 222 частично заблокирован проходящим семенем.
Чтобы инвертировать и нормировать напряжение исходного сигнала (Vraw), показанного на фиг. 3A для каналов C1-C12, с целью получения данных NOS, показанных на фиг. 3B для каналов C1–C12, используется следующее уравнение:
NOS=1 – (Vraw – Vb)/(Vu – Vb),
где NOS – нормированный выходной сигнал,
Vraw – исходное обнаруженное напряжение светового канала 222,
Vb – среднее напряжение, когда световой канал 222 заблокирован,
Vu – среднее напряжение, когда световой канал 222 разблокирован.
Значение Vb может задаваться как постоянная величина (например, 0,025 вольт) или Vb может быть средним выходным напряжением каждого фотодиода 224 при выключенным соответствующем светодиодном излучателе 216.
Значение Vu может быть последовательным буфером, работающим на принципе обслуживания в порядке поступления (first-in-first-out, FIFO), на 100 сканов данных Vraw каждого фотодиода 224, когда нет частицы, проходящей через соответствующий световой канал 222 (например, С1-С12), и когда напряжение Vraw имеет изменение менее ±0,01 В от предыдущего скана к текущему скану.
Следует принимать во внимание, что для варианта 200B осуществления с двумя матрицами процесс генерации данных NOS для каналов C13-C24 является таким же, что и для каналов C1-C12.
Обращаясь к фиг. 2, семена пронумерованы позициями S1-S5 от самого первого (самого нижнего) до самого последнего (самого верхнего) семени. Когда самое первое одиночное семя S1 проходит через первую световую плоскость 210-1, значения NOS генерируются, как показано на фиг. 3B, в виде небольшого кластера объединенных ячеек, имеющих значения от 0,1 до 1 в серии столбцов (каналы C2-C4 в этом примере) и в серии строк сканов (строки 3-17 в этом примере). Следует отметить, что самый первый скан (т.е. строка 1 скана) находится в нижней части фиг. 3А и 3Б. По-прежнему ссылаясь на фиг. 2, когда группа семян S2-S5 (которые находятся в непосредственной близости друг от друга, причем семена S2, S3, семена S2, S4 и семена S4, 25 перекрываются или касаются друг друга) проходит через первую световую плоскость 210-1, значения NOS генерируются, как показано на фиг. 3B, в виде большого кластера объединенных ячеек, имеющих значения от 0,2 до 1 в серии столбцов (каналы C4-C10 в этом примере) и в серии строк сканов (строки 15-48 в этом примере). Каждый кластер значений NOS от 0,2 до 1 называется "Основным Событием". Таким образом, следует понимать, что Основное Событие может представлять собой одно дискретное семя (такое как семя S1) или Основное Событие может представлять собой несколько семян (таких как семена S2-S5), проходящих через световые плоскости 210-1 в непосредственной близости друг к другу. Для варианта 200B с двумя матрицами, аналогичный набор главных событий будет генерироваться для семян, последовательно проходящих через каналы C13-C24 второй световой плоскости 210-2 (на чертеже не показаны).
Идентификация Основных Событий
После того, как данные NOS сформированы, контроллер 110 использует программу 101 для анализа данных NOS, чтобы выявить кластеры ячеек и ассоциировать каждый кластер ячеек с уникальным идентификатором для дальнейшей обработки, рассматриваемой ниже. Чтобы различать кластеры ячеек и ассоциировать каждый кластер ячеек как отдельное Основное Событие, данные NOS анализируются, чтобы определить, когда в каждом канале C1-С12 появится первая ячейка, имеющая значение NOS, превышающее предварительно заданное минимальное значение (например, 0,15), что свидетельствует о том, что семя начинает проходить через этот канал (то есть имеет место "начальное состояние"), и когда в каждом канале C1-C12 останется последняя NOS ячейка, имеющая значение, превышающее заранее заданное минимальное значение (например, 0,15), что указывает на то, что семя прошло через канал (т.е. имеет место "конечное состояние"). Все непосредственно соединенные ячейки во всех столбцах между начальным и конечным состояниями составляют единый кластер ячеек и определяют одно Основное Событие. Следует иметь в виду, что для варианта 200B осуществления с двумя матрицами процесс различения кластеров ячеек и связывания каждого кластера ячеек в отдельное Основное Событие для каналов C13-C24 является таким же, как описано выше для каналов С1-С12.
Процесс идентификации начального/конечного состояний
Чтобы выявить начальное состояние для каждого столбца канала и конечное состояние для каждого столбца канала, программой 101 контроллера 110 выполняется процесс 400 идентификации начального/конечного состояний, проиллюстрированный на фиг. 4. Для целей настоящего документа, рассматриваются только значения NOS каналов С1-С12. Для варианта 200B с двумя матрицами тот же процесс выполняется для каналов C13-C24.
Обращаясь к фиг. 4, на начальном этапе 402 анализируется ячейка данных NOS конкретного канала, т.е. считывается и сохраняется в памяти значение текущей ячейки NOS (NOS-c), и первоначально предполагается, что она находится в конечном состоянии, пока не будет установлено иное, как описано в данном документе. На этапе 404 считывается и сохраняется в памяти значение ячейки NOS (NOS-p) этого же канала, непосредственно предшествующей ячейке NOS-c. На этапе 406 считывается и сохраняется в памяти значение ячейки NOS (NOS-f) этого же канала, следующей за ячейкой NOS-c. На этапе 408 вычисляется изменение сигнала по сравнению с предшествующей ячейкой (Look Behind Delta, Delta-lb) этого канала путем вычитания значения ячейки NOS-p из значения ячейки NOS-c. Рассчитанное изменение Delta-lb сохраняется в памяти.
На этапе 410 вычисляется изменение сигнала по сравнению с последующей ячейкой (Look Ahead Delta, Delta-la) этого канала путем вычитания значения ячейки NOS-c из значения ячейки NOS-f. Значение Delta-la сохраняется в памяти. На этапе 412 выполняется поиск в памяти с целью выявления соответствующего состояния (то есть начального или конечного состояния) для ячейки NOS-p из предыдущего цикла. Если ячейка NOS-p находится в конечном состоянии (т.е. ответ на этапе 412 – Да), программа переходит к этапу 414.
На этапе 414, если значение Delta-lb больше 0,1 (т.е. условие выполняется), ячейка NOS-c ассоциируется на этапе 420 как находящаяся в начальном состоянии, и ассоциированное состояние записывается в памяти. Затем программа переходит к этапу 430 для циклического перехода к следующей ячейке NOS в следующем столбце в той же строке скана. Следует понимать, что, когда программа переходит к следующей ячейке NOS в следующем столбце той же строки, ячейка, которая была ячейкой NOS-f в предыдущем цикле, теперь становится ячейкой NOS-c в новом цикле. Точно так же ячейка, которая была ячейкой NOS-c в предыдущем цикле, теперь становится ячейкой NOS-p в новом цикле. Возвращаясь к этапу 414, если условие на этапе 414 не выполняется, сигнал NOS-c дополнительно анализируется на этапе 418.
Если на этапе 418 значение NOS-c больше 0,15 В (т.е. условие выполняется), то на этапе 420 ячейка NOS-c ассоциируется как находящаяся в начальном состоянии, и ассоциированное состояние записывается в памяти. Затем программа переходит к этапу 430 для перехода к следующей ячейке NOS следующего столбца в той же строке сканирования. Однако если условие этапа 418 не выполняется, программа переходит к этапу 430 для циклического перехода к следующей ячейке NOS следующего столбца в той же строке сканирования.
Возвращаясь к этапу 412, если ячейка NOS-p не находится в конечном состоянии (т.е. ответ на этапе 412 – Нет), программа переходит к этапу 422. На этапе 422, если ячейка NOS-p находится в начальном состоянии (т.е. ответ на этап 422 – Да), программа переходит к этапу 424. Если на этапе 424 значение Delta-lb меньше -0,2, а значение Delta-la меньше -0,012 (т.е. условия выполняются), то на этапе 428 ячейка NOS-c ассоциируется как находящаяся в конечном состоянии, и ассоциированное с ней состояние записывается в память. Затем программа переходит к этапу 430 для перехода к следующей ячейке NOS следующего столбца в той же строке сканирования. Если, однако, условия этапа 424 не выполняются, ячейка NOS-c дополнительно анализируется на этапе 426.
Если на этапе 426 значение ячейки NOS-c меньше 0,15 В (т.е. условие выполняется), то на этапе 428 ячейка NOS-c ассоциируется как находящаяся в конечном состоянии, и ассоциированное с ней состояние записывается в память. Затем программа переходит к этапу 430 для перехода к следующей ячейке NOS следующего столбца в той же строке сканирования. Если, однако, условие этапа 426 не выполняется, программа переходит к этапу 430 для перехода к следующей ячейке NOS следующего столбца в той же строке сканирования.
Процесс повторяется для каждой из ячеек в строке по всем каналам столбцов (C1-C12). Когда строка скана завершена, программа переходит к следующей строке скана и повторяет процесс для каждой из ячеек в этой строке по всем столбцам (С1-С12) и т.д., тем самым идентифицируя каждое начальное состояние и каждое конечное состояние.
Как только ячейка с начальным состоянием и ячейка с конечным состоянием идентифицированы для каждого канала столбца, все ячейки в этом столбце от ячейки с начальным состоянием до ячейки с конечным состоянием связываются в кластер столбцов. Кроме того, все кластеры столбцов, которые напрямую соединены хотя бы одной ячейкой, затем ассоциируются как часть Основного События. Затем всем ячейкам, составляющим это Основное Событие, присваивается уникальная метка Основного События, сгенерированная программой и сохраняемая в памяти для дальнейшего использования, рассматриваемого ниже. Например, уникальная метка Основного События может быть целым числом, и каждому последующему Основному Событию может быть присвоено следующее последовательное целое число, так что каждое Основное Событие имеет уникальный идентификатор с шагом в одно целое число.
Например, как показано на фиг. 3B, кластер непосредственно прилегающих ячеек после самой первой начальной ячейки (то есть самой нижней начальной ячейки) определяет первое Основное Событие в скане. Как показано на фиг. 7, все смежные ячейки, составляющие это Основное Событие, помечены целым числом 999. Следующий кластер непосредственно смежных ячеек после следующей самой первой начальной ячейки определяет следующее Основное Событие, и каждая из смежных ячеек, составляющих это Основное Событие, помечена на фиг. 7 следующим последовательным целым числом 1000.
Для варианта 200B осуществления с двумя матрицами тот же процесс повторяется для сканов данных NOS, относящимся к каналам C13-C24 второй световой плоскости 210-2. Как рассматривается ниже, следует понимать, что вторая световая плоскость 210-2 (которая ориентирована под углом 90 градусов к первой световой плоскости 210-1) может выдавать скан данных NOS, который имеет различия в выявленных кластерах семян из-за различия в близости и перекрытии семян в двумерном скане второй световой плоскости 210-2. Таким образом, эти различия в кластерах семян могут приводить к различиям в нумерации Основных Событий из-за различий между начальными и конечными состояниями, выявленными в процессе 400 идентификации начала/конца кластеров семян, если "смотреть" в ориентации второй световой плоскости 210-2. Эти различия учитываются в процессе Сравнения Групп 900A, 900B, рассматриваемом ниже.
Анализ Основного События
Для определения точного количества семян, дополнительно анализируется скан данных NOS, чтобы посредством процесса 500 анализа Основного События, показанного на фиг. 5 определить, соответствует ли Основное Событие одному семени или Основное Событие включает в себя одно или несколько семян. Процесс 500 анализа Основного События включает в себя два подпроцесса: (A) выявление "столбцов впадины", чтобы определить, нужно ли в дальнейшем разделять или разбивать Основное Событие на отдельные События; и (B) маркировку каждого отдельного События уникальным идентификатором для последующего использования. Процесс 500 анализа Основного События (и каждый из его подпроцессов) выполняется контроллером 110 системы 100 контроля (рассматриваемой ниже) посредством программы 101 программного обеспечения. Описание процесса 500 анализа Основного События (и каждого из его подпроцессов) приводится только для скана каналов Cl-С12. Однако следует иметь в виду, что для варианта 200B осуществления с двумя матрицами аналогичный процесс 500 выполняется для каналов C13-C24.
A. Процесс идентификации столбца впадины
"Столбец впадины" – это столбец, в котором значение ячейки NOS меньше, чем значения ячеек NOS непосредственно слева и справа от текущей анализируемой ячейки NOS. В общем, если между двумя ячейками NOS с высоким значением в соседних столбцах выявляется ячейка с более низким значением NOS, это предполагает, что через световую плоскость 210-1 бок о бок проходят два семени в непосредственной близости друг от друга или с частичным перекрытием друг друга. Например, если напряжение сигнала кластера, генерируемого прохождением двух семян, рассматривать как горы или плато, столбцы впадин представляют собой долины между горами или плато, которые разграничивают эти два семени. Столбец впадины включает в себя только те ячейки в скане данных NOS, которые соединяют кластер ячеек, составляющих Основное Событие, слева и справа от текущей анализируемой ячейки NOS (NOS-c). Обращаясь к скану данных NOS, показанному на фиг. 3B, в Основном Событии 999 отсутствуют столбцы впадины, но в Основном Событии 1000 имеется три столбца 1000A, 1000B, 1000C впадины. Из-за наличия столбцов впадины в Основном Событии 1000, его необходимо разделить на отдельные События, как поясняется ниже в разделе "Процесс 600 разделения и маркировки Основного События", но сначала поясняется процесс выявления столбцов впадины.
Обращаясь к фиг. 3B и логической блок-схеме на фиг. 5, столбцы впадины выявляются путем анализа каждой ячейки в каждой строке скана столбцов канала (С1-С12) перед переходом к следующей строке скана. На начальном этапе 502 сначала определяют, ассоциированы ли анализируемая ячейка NOS (т.е. текущая ячейка NOS (NOS-c)), ячейка NOS слева от нее (NOS-1) и ячейка NOS справа от нее (NOS-r) с Основным Событием (как описано выше). Если ячейка NOS-c не была ранее ассоциирована с Основным Событием, программа переходит к этапу 530, чтобы проанализировать следующую ячейку NOS в следующем столбце в той же строке скана. Если ответ на этапе 502 – Да, программа переходит к этапу 504 и анализирует сканы данных NOS, чтобы выявить первую начальную ячейку после конечной ячейки в этом столбце, чтобы определить, имеются ли какие-либо ячейки NOS после выявленной начальной ячейки в этом столбце вплоть до ячейки NOS-c, помеченные как ячейка впадины (как пояснено ниже). Если ответ на этапе 504 – Нет, программа переходит к этапу 530. Если ответ на этапе 504 – Да, программа переходит к этапу 506.
Например, как показано на фиг. 3B, предположим, что ячейка в строке 23 скана в канале или столбце 5 (далее обозначаемая как r26:c5) является текущей анализируемой ячейкой (то есть ячейкой NOS-c). На этапе 502 ячейка NOS-c r26:c5 была ранее ассоциирована с Основным Событием, помеченным меткой 1000, и ячейка справа от нее (то есть ячейка NOS-r r26:c6) также была ранее ассоциирована с Основным Событием, помеченным меткой 1000. Однако ячейка слева (то есть ячейка NOS-1 r26:c4) не ассоциирована с каким-либо Основным Событием, поэтому ответ на этапе 502 – Нет, и программа переходит к этапу 530 и переходит к следующей ячейке в той же строке в следующем столбце. Следует понимать, что если ячейки справа или слева от ячейки NOS-c не ассоциированы с одним и тем же Основным Событием, ячейка NOS-c не может быть ячейкой впадины. Переходя к ячейке r26:c7 как ячейке NOS-c и повторяя этап 502, ячейка r26:c7 ранее была ассоциирована с Основным Событием, помеченным меткой 1000, и ячейка справа от нее (т.е. ячейка NOS-r r26:c8) также ранее была ассоциирована с Основным Событием, помеченным меткой 1000. Аналогично, ячейка слева от нее (то есть ячейка r26:c6) также была ассоциирована с Основным Событием 1000, поэтому ответ на этапе 502 – Да, и программа переходит к этапу 504. На этапе 504 программа просматривает предыдущие сканы в том же столбце (т.е. в столбце 7) до первой начальной ячейки в этом столбце (которая в данном случае является ячейкой NOS-c r26:c7) и определяет, что до r26:c7 здесь отсутствуют ячейки, которые ранее были помечены как ячейки впадины, потому что самая ранняя ячейка впадины определяет столбец впадины. Поскольку ответ на этапе 504 относительно ячейки r26:c7 – Да, программа переходит к этапу 506.
На этапе 506 анализируется скан данных NOS, чтобы определить, находится ли ячейка NOS-c в столбце, непосредственно граничащем с ячейкой NOS, которая ранее была помечена как ячейка впадины (поясняется ниже). Если ответ на этапе 506 – Да, программа переходит к этапу 530. Если ответ на этапе 506 – Нет, программа переходит к этапу 510. Ссылаясь на предыдущий пример в отношении ячейки r26:c7, программа подтверждает, что ячейка в r26:c7 не граничит с какими-либо ячейками, ранее помеченными как ячейки впадины, поскольку две ячейки впадины или два столбца впадины не могут располагаться бок о бок друг с другом. Поскольку ответ на этапе 506 относительно ячейки r26:c7 – Да, программа переходит к этапу 510.
На этапе 510 программа считывает и сохраняет в памяти значение ячейки NOS-c. На этапе 512 программа считывает и сохраняет в памяти значение ячейки NOS слева от нее (NOS-1). На этапе 514 программа считывает и сохраняет в памяти значение ячейки NOS справа от нее (NOS-r). На этапе 516 программа вычисляет "значение Delta-L", которое представляет собой величину разницы между значением ячейки NOS-1 и ячейки NOS-c. На этапе 518 программа вычисляет "значение Delta-R", которое представляет собой разность между значением ячейки NOS-r и значением ячейки NOS-c. Ссылаясь на предыдущий пример относительно ячейки NOS-c r26:c7, ее значение на фиг. 3B равно 0,2; значение NOS-1 ячейки r26:c6 равно 0,8; значение NOS-r ячейки r26:c8 равно 0,2, и, следовательно, значение Delta-L равно 0,6 (т.е. 0,8-02), а значение Delta-R равно 0 (т.е. 0,2-0,2).
Если на этапе 520 значение Delta-L и значение Delta-R больше или равно 0,03 (т.е. условие выполняется), то на этапе 522 программа помечает ячейку NOS-c как "ячейку впадины" и сохраняет ее в памяти. Затем программа переходит к этапу 530 для циклического перехода к следующей ячейке NOS в следующем столбце в той же строке скана. Если значение Delta-L или Delta-R меньше 0,03 (т.е. условие этапа 520 не выполняется), программа переходит к этапу 524. Ссылаясь на предыдущий пример относительно ячейки в r26:c7, хотя вычисленное выше значение Delta-L 0,6 больше 0,03, значение Delta-R 0 меньше 0,03, поэтому программа переходит к этапу 524.
На этапе 524 программа выявляет значение ячейки NOS двумя столбцами правее (NOS-2r) ячейки NOS-c и определяет "значение Delta-2R", которое представляет собой величину разницы между значением ячейки NOS-2r и значением ячейки NOS-r. Если значение Delta-2R больше или равно 0,03, и значение Delta-L больше или равно 0,03 (т.е. оба условия выполняются), программа переходит к этапу 526. Однако если какое-либо условие этапа 524 не выполняется, программа переходит к этапу 530. Ссылаясь на предыдущий пример относительно ячейки в r26:c7, значение ячейки NOS-2r (то есть ячейки r26:c9) равно 1,0. Таким образом, поскольку значение Delta-L 0,6 больше или равно 0,03, и значение Delta-2R 0,8 (т.е. 1,0-0,2) больше или равно 0,03, условия выполняются, и программа переходит к этапу 526.
На этапе 526 программа определяет, выполняется ли условие, что значение ячейки NOS-c меньше или равно значению ячейки NOS-r. Если это так, то на этапе 522 ячейка NOS-c помечается и сохраняется в памяти как ячейка впадины. Ссылаясь на предыдущий пример относительно ячейки в r26:c7, поскольку значение ячейки r26:c7 равно значению ячейки r26:c8, условие выполняется, и поэтому ячейка r26:c7 помечается как ячейка впадины. Затем программа переходит к ячейке r23:cl0. Если ответ на этапе 526 – Нет, то на этапе 528 ячейка NOS-r помечается и сохраняется в памяти как ячейка впадины.
Затем программа переходит к этапу 530 циклического перехода к следующему столбцу справа в той же строке скана. После перехода к следующему столбцу следует понимать, что ячейка, которая в предыдущем цикле была ячейкой NOS-r, станет в новом цикле ячейкой NOS-c, а ячейка, которая в предыдущем цикле была ячейкой NOS-c, станет в новом цикле ячейкой NOS-1.
Вышеупомянутый процесс повторяется для каждой из ячеек в строке по всем столбцам каналов (С1-С12). Когда строка скана завершена, программа переходит к следующей строке скана и повторяет процесс для каждой из ячеек в этой строке по всем столбцам (С1-С12), и так далее, тем самым выявляя все ячейки впадины. Все ячейки, непосредственно примыкающие к ячейкам впадины, составляют столбец впадины.
Для варианта 200B осуществления с двумя матрицами тот же процесс повторяется для сканов данных NOS в отношении каналов C13-C24 второй световой плоскости 210-2. Как обсуждалось ранее, следует понимать, что вторая световая плоскость 210-2 (которая ориентирована под углом 90 градусов к первой световой плоскости 210-1) может выдавать скан данных NOS, который имеет различия в выявленных кластерах семян из-за различия в близости и перекрытии семян в двумерном скане второй световой плоскости 210-2. Таким образом, эти различия в кластерах семян могут приводить к различиям в нумерации Основных Событий из-за различий между начальными и конечными состояниями, идентифицированными в ходе процесса 400 идентификации начала/конца кластеров семян, если "смотреть" в ориентации второй световой плоскости 210-2. Кроме того, из-за разницы в 90 градусов в ориентации первой и второй световых плоскостей 210-1, 210-2, разные столбцы выемки могут быть ассоциированы с соответствующими Основными Событиями. Например, как показано на фиг. 2B, вторая световая плоскость 210-2 может иметь промежуток или столбец выемки между семенами, не обнаруженными в двумерном "виде" первой световой плоскости 210-1 в ходе процесса 500 идентификации столбцов выемки для каналов C13-C24.
Б. Процесс разделения и маркировки Основного События
На фиг. 7 показаны исходные метки 999 и 1000 Основного События, присвоенные в рамках процесса 400 идентификации Основного События, со столбцами 1000A, 1000B, 1000C, идентифицированными в соответствии с описанным выше процессом 400 выявления столбца впадины. На фиг. 8A показано Основное Событие 1000 с фиг. 7, изначально разделенное на два отдельных События, маркированных метками 1000 и 1001 в соответствии с процессом 600 разделения и маркировки Основного События (рассматриваемым ниже). На фиг. 8B показано Основное Событие 1000, дополнительно разделенное на три События 1000, 1001, 1002 в соответствии с процессом 600 разделения и маркировки Основного События (рассматриваемым ниже). И на фиг. 8C показано Основное Событие 1000, дополнительно разделенное на четыре События 1000, 1001, 1002, 1003 в соответствии с процессом 600 разделения и маркировки Основного События (рассматриваемым ниже).
Когда столбцы впадины (если таковые имеются) в Основном Событии выявлены, программа выполняет процесс 600 разделения Основного События согласно логической блок-схеме, показанной на фиг. 6. Если в Основном Событии отсутствуют столбцы впадины, процесс 600 разделения и маркировки Основного События пропускается для этого Основного События, и программа переходит к определению метрик Событий (рассматриваемому ниже).
Обращаясь к фиг. 6, на начальном этапе 602 производится анализ сканов данных NOS, чтобы выявить самое раннее Основное Событие, имеющее столбец впадины, которое согласно фиг. 7 представляет собой Основное Событие, обозначенное меткой 1000. На этапе 604 программа выявляет самую раннюю (то есть самую нижнюю) ячейку впадины в этом Основном Событии, которой на фиг. 8A является ячейка впадины 1000A в строке 26 скана в столбце C7 (т.е. r26:c7).
На этапе 606 программа разделяет Основное Событие на два отдельных События (т.е. левое Событие и правое Событие). Все ячейки в Основном Событии справа от столбца впадины вместе со всеми ячейками в нижней половине столбца впадины ассоциированы с правым Событием. Все ячейки слева от столбца впадины и над столбцом впадины вместе с ячейками в верхней половине столбца впадины ассоциированы с левым Событием.
На этапе 608 всем ячейкам, ассоциированным с правым Событием, присваивается последняя использованная метка. На этапе 610 всем ячейкам, ассоциированным с левым Событием, присваивается новая метка, увеличенная до следующего последовательного целого числа. В примере, показанном на фиг. 8A, можно видеть, что все ячейки справа от первого столбца 1000A впадины, и ячейки, составляющие нижнюю половину столбца 1000A впадины, сохраняют свою исходную метку (то есть метку 1000). Все ячейки слева от столбца 1000A впадины и выше столбца 1000A впадины, а также верхняя половина столбца 1000A впадины помечены следующим последовательным целым числом (то есть 1001).
Затем программа переходит к этапу 612, чтобы определить, включает ли в себя Основное Событие другие столбцы впадины. Если в Основном Событии нет другого столбца впадины (т.е. ответ на этапе 612 – Нет), процесс разделения и маркировки Основного События завершается, и программа переходит к процессу определения метрик События, рассматриваемому ниже. Если в Основном Событии имеются другие столбцы впадины (т.е. ответ на этапе 612 – Да), программа переходит к этапу 616 и переходит к следующему самому раннему столбцу впадины (то есть столбцу впадины со следующей самой нижней ячейкой впадины). Обращаясь к фиг. 8A, следующий самый ранний столбец впадины представляет собой столбец 1000B впадины.
После перехода к следующему столбцу впадины, на этапе 618 программа определяет, отличается ли метка, ассоциированная с ячейкой справа от самой ранней ячейки впадины, от метки самой ранней ячейки впадины. Если ответ на этапе 618 – Да, описанный выше процесс этапов 606-612, повторяется. Если ответ на этапе 618 – Нет, программа переходит к этапу 620. В примере, показанном на фиг. 8A, ячейки справа от самой ранней ячейки впадины (т.е. ячейки с номером r31:c9) в столбце 1000B имеют ту же метку (то есть 1000), что и самая ранняя ячейка впадины. Соответственно, ответ на этапе 618 – Нет, и поэтому программа переходит к этапу 620.
На этапе 620 программа снова разделяет Основное Событие на два отдельных События (то есть левое событие и правое событие). Все ячейки в Основном Событии слева от столбца впадины, под столбцом впадины и в нижней половине столбца впадины ассоциируются с левым Событием. Все ячейки в Основном Событии справа от столбца впадины, над столбцом впадины и в верхней половине столбца впадины ассоциируются с правым Событием.
На этапе 622 всем ячейкам, ассоциированным с левым Событием, присваивается последняя использованная метка. На этапе 624 всем ячейкам, связанным с правым Событием, присваивается новая метка, увеличенная до следующего последовательного целого числа. Обращаясь теперь к фиг. 8B, можно видеть, что все ячейки слева от столбца 1000B впадины, и ячейки, составляющие нижнюю половину столбца 1000B впадины, сохраняют свои исходные метки (то есть метки 1000 и 1001). Все ячейки справа от столбца 1000B впадины и выше столбца 1000B впадины, а также верхняя половина столбца 1000B впадины помечены следующим последовательным целым числом (т.е. 1002).
Затем программа переходит к этапу 612, чтобы определить, содержит ли Основное Событие другие столбцы впадины. Если в Основном Событии отсутствует другие столбцы впадины (т.е. ответ на этапе 612 – Нет), процесс разделения и маркировки Основного События завершается, и программа переходит к процессу определения метрик События, который рассматривается ниже. Если в Основном Событии имеются другие столбцы впадины (т.е. ответ на этапе 612 – Да), программа переходит к этапу 616 и переходит к следующему самому раннему столбцу впадины (то есть столбцу впадины со следующей самой нижней ячейкой впадины). Обращаясь к фиг. 8B, следующим самым ранним столбцом впадины является столбец 1000C впадины.
После перехода к следующему столбцу впадины, программа повторяет этап 618 и соответствующие этапы после него. В примере, показанном на фиг. 8B, ячейки справа от самой ранней ячейки впадины (то есть ячейки с номером r41:c7) в столбце 1000C впадины имеют метку, отличающуюся от метки самой ранней ячейки впадины (т.е. 1000). Соответственно, ответ на этапе 618 – Да, так что программа переходит к этапу 606.
На этапе 606 программа разделяет Основное Событие на два отдельных События (т.е. левое Событие и правое Событие). Все ячейки в Основном Событии справа от столбца впадины вместе со всеми ячейками в нижней половине столбца впадины ассоциируются с правым Событием. Все ячейки слева от столбца впадины и над столбцом впадины вместе с ячейками в верхней половине столбца впадины ассоциируются с левым Событием.
На этапе 608 всем ячейкам, ассоциированным с правым Событием, присваивается последняя использованная метка. На этапе 610 всем ячейкам, ассоциированным с левым Событием, присваивается новая метка, увеличенная до следующего последовательного целого числа. Обращаясь теперь к фиг. 8C, можно видеть, что всем ячейкам справа от столбца 1000C впадины и ячейкам, составляющим нижнюю половину столбца 1000C впадины, присвоена последняя использованная метка (то есть 1002). Всем ячейкам слева от столбца 1000C впадины и выше столбца 1000C впадины, а также в верхней половине столбца 1000C впадины присвоена метка в виде следующего последовательного целого числа (т.е. 1003).
Затем программа переходит к этапу 612, чтобы определить, содержит ли Основное Событие другие столбцы впадины. Если в Основном Событии нет других столбцов впадины (т.е. ответ на этапе 612 – Нет), процесс разделения и маркировки Основного События завершается, и программа переходит к процессу определения метрик События, рассматриваемому ниже. Если в Основном Событии имеются другие столбцы впадины (т.е. ответ на этапе 612 – Да), программа переходит к этапу 616 и переходит к следующему самому раннему столбцу впадины (то есть столбцу впадины со следующей самой нижней ячейкой впадины). На фиг. 8C другие столбцы впадины отсутствуют, поэтому процесс разделения и маркировки Основного События завершается, и программа переходит к процессу определения метрик События, описанному ниже.
Для варианта 200B осуществления с двумя матрицами этот же процесс повторяется для сканов данных NOS в отношении каналов C13-C24 второй световой плоскости 210-2. Как обсуждалось ранее, следует понимать, что вторая световая плоскость 210-2 (которая ориентирована под углом 90 градусов относительно первой световой плоскости 210-1) может выдавать скан данных NOS, который имеет различия в выявленных кластерах семян из-за различия в близости и перекрытии семян при двумерном сканировании второй световой плоскости 210-2. Таким образом, эти различия в кластерах семян могут приводить не только к различиям в нумерации Основных Событий из-за различий между начальными и конечными состояниями, выявленными в ходе процесса 400 идентификации начала/конца кластеров семян, если "смотреть" в ориентации второй световой плоскости 210-2, но и отличающаяся на 90 градусов ориентация первой и второй световых плоскостей 210-1, 210-2 может приводить к тому, что в процессе 500 выявления столбца впадины для каналов C13-C24 будут идентифицированы разные столбцы впадины для соответствующих Основных Событий. В результате различий в столбцах впадины могут возникать различия в разделении и маркировке Событий в ходе процесса 600 разделения Основного События и маркировки Событий. Эти различия учитываются в Процессе 900A, 900B Сравнения Групп, который рассматривается ниже.
Определение метрик События
После завершения процесса 600 разделения Основного События и маркировки Событий программа определяет несколько метрик каждого События, которые используются в ходе рассматриваемого ниже Процесса 900A, 900B Сравнения Групп, в том числе Длительность События, Ширину События, Разрывы События, Объем Напряжения События и Протяженность События.
Длительность События – это общая длительность Основного События от времени сканирования последней строки Основного События минус время сканирования первой строки Основного События. Обращаясь к фиг. 8C, Длительность События для Основного События 999 обозначена ссылочной позицией 702, а Длительность События для Основного События 1000 обозначена ссылочной позицией 704.
Ширина События – это общая ширина Основного События, ограниченного каналами 222 (С1-С12), имеющими значение в ячейках NOS, умноженное на расстояние между каналами 222. Обращаясь к фиг. 8C, Ширина События для Основного События 999 обозначена ссылочной позицией 706, а Ширина События для исходного Основного События 1000 (теперь разделенного на отдельные События 1000, 1001, 1002, 1003) обозначена ссылочной позицией 708.
Разрывы События – это общее количество раз, когда любой канал в любом Основном Событии переходит из начального состояния в конечное состояние и обратно в начальное состояние. Обращаясь к фиг. 8C, в Основном Событии 999 нет Разрывов События. Однако в исходном Основном Событии 1000 (теперь разделенном на отдельные События 1000, 1001, 1002, 1003) Разрывы Событий обозначены ссылочной позицией 710.
Объем Напряжения События – это сумма значений ячеек NOS Основного События, умноженная на Групповую Скорость (более подробно рассматриваемую ниже).
Протяженность События – это истинное расстояние, равное Длительности События, умноженной на Групповую Скорость (более подробно рассматриваемую ниже).
Группирование Основных Событий
Основные События группируют для целей: (а) сравнения количества семян в заданном Окне Сканирования и (б) вычисления Групповой Скорости. Окно Сканирования начинается, когда начинается самое раннее Основное Событие, и Окно Сканирования открыто до тех пор, пока не будет обнаружено заданное количество сканирований без обнаружения семян (например, не будет обнаружено ни одного значения NOS, превышающего 0,15) после последнего конечного состояния для объединенного кластера NOS ячеек, определяющего это Основное Событие. Например, если заданное количество сканирований после последнего конечного состояния самого раннего Основного События, в ходе которых не обнаружено семян, предположим, равно 10 сканированиям, Окно Сканирования закроется после 10 сканирований, в ходе которых не было обнаружено семян. Другими словами, с использованием предлагаемого зазора в 10 сканирований, если частота сканирования составляет 10 кГц, Окно Сканирования закроется через 1 мс после последнего конечного состояния самого раннего Основного События, открывающего Окно Сканирования. Все Основные События, охваченные этим Окном Сканирования, называются "Группой Основных Событий" или для краткости "Группой".
Скорость Группы ("Групповая Скорость") определяется по-разному в зависимости от того, используется ли вариант 200A с одной матрицей или вариант 200B с двумя матрицами. Для варианта 200B с двумя матрицами, поскольку имеется две световых плоскости 210-1, 210-2, Групповая Скорость может быть точно рассчитана путем определения изменения во времени между первой световой плоскостью 210-1 и второй световой плоскостью 210-2, обнаруживающими первое Основное Событие в Группе, деленное на расстояние между световыми плоскостями 210-1, 210-2 (например, равное 0,125 дюйма в описанном выше варианте осуществления). Средняя скорость прохождения семян может вычисляться с помощью буфера FIFO для заранее заданного количества Групп (например, 3000).
Для варианта 200A с одной матрицей, поскольку имеется только одна световая плоскость 210-1, Групповая Скорость вычисляется с использованием характерной Ширины События, деленной на характерную Длительность События. Как следует из названия, характерная Ширина События является наиболее распространенной Шириной События для Группы в течение заранее заданного скользящего количества Основных Событий (т.е. наиболее распространенным количеством каналов 222 со значениями в ячейках NOS, имеющих место в течение заранее заданного количества Событий, умноженным на расстояние между каналами 222). Аналогичным образом, характерная Длительность События, как следует из названия, является наиболее распространенной Длительностью Событий, имеющих место в течение заранее заданного количества Основных Событий. Целью использования характерного значения является получение среднего измерения ширины и длительности одного Основного События при предположении, что Основное Событие чаще всего будет состоять из одной частицы.
Как указано выше, Объем Напряжения События и Протяженность События вычисляются с использованием Групповой Скорости (вычисляется любым из описанных выше способов в зависимости от того, используется ли вариант 200A с одной матрицей или вариант 200B с двумя матрицами). В варианте 200B с двумя матрицами, который выдает скорость каждого кластера ячеек (состоящего из одного семени или из группы семян), может применяться дополнительный фильтр, в котором делается исключение для Объема Напряжения События и Протяженности События, если вычисленная Групповая Скорость больше средней скорости в 2,5 раза. В таких случаях кластер ячеек, определяющих Основное Событие, скорее всего, является мусором. Для таких случаев средняя скорость используется для любых событий, кроме первого Основного События в Группе.
Гистограммы метрик
Чтобы классификации продукта, протекающего через узел 200 датчика, наиболее часто встречающиеся характерные значения Объема Напряжения События (Event Voltage Volume, EVV), Протяженности События и Ширины События определяются и сохраняются с использованием гистограмм для одной световой плоскости 210-1 (для варианта 200A с одной матрицей) или для каждой световой плоскости 210-1, 210-2 (для варианта 200B с двумя матрицами). Это делается с использованием заранее заданного буфера FIFO (например, в 3000 Основных Событий).
Гистограмма EVV имеет 30 столбиков или интервалов, которые включают в себя только 90% самых нижних Основных Событий. Характерное значение Объема Напряжения (VVM) находят путем усреднения значений 4 самых высоких столбиков или интервалов.
Гистограмма Протяженности События имеет 20 столбиков или интервалов, которые включают в себя только 90% самых нижних Основных Событий. Характерное значение Протяженности находят путем усреднения значений 4 самых высоких столбиков или интервалов.
Гистограмма Ширины События имеет диапазон столбиков или интервалов от 0 до 13. Характерное значение Ширины определяется путем усреднения значений двух самых высоких столбиков или интервалов.
Классификация Основных Событий
На фиг. 9 представлена логическая блок-схема Процесса 800 Классификации для классификации Основного События как "пятерка" (т.е. пять семян), "четверка" (т.е. четыре семени), "тройка" (т.е. три семени), "двойка "(т.е. два семени), "единица" (т.е. одно семя) или мусор. Согласно логической блок-схеме, показанной на фиг. 9, программа сначала проверяет, удовлетворяет ли Основное Событие критериям классификации как пятерка, затем как четверка, затем как тройка, затем как двойка, затем как единица, а затем как мусор. Как только Основное Событие классифицируется, как отвечающее критериям одной из этих градаций, программа выходит из цикла и переходит к следующему Основному Событию. В приведенных ниже примерах расчетов для классификации Основного События как пятерка, четверка, тройка, двойка, единица или мусор, с целью различения количества семян в Основном Событии были эмпирически выбраны некие значения EVV. Более точными для оценки количества семян в Основном Событии могут быть другие значения EVV, и поэтому значения EVV, приведенные в примерных расчетах, следует рассматривать как неограничивающие значения EVV для целей классификации Основного События при оценке фактического количества семян, составляющих Основное Событие.
На этапе 802, если EVV превышает VVM более чем в 6,8 раз, так что условие этапа 802 выполняется, программа классифицирует Основное Событие на этапе 804 как Five (пятерку) и затем переходит к этапу 840, чтобы классифицировать следующее Основное Событие. Если условие этапа 802 не выполняется, программа переходит к этапу 806. На этапе 806, если EVV более чем в 5 раз превышает VVM, т.е. условие этапа 806 выполняется, программа классифицирует Основное Событие на этапе 808 как Quad (четверку), а затем переходит к этапу 840, чтобы классифицировать следующее Основное Событие. Если условие этапа 806 не выполняется, программа переходит к этапу 810.
На этапе 810, если EVV более чем в 3,9 раза превышает VVM, т.е. условие этапа 810 выполняется, программа классифицирует Основное Событие на этапе 818 как Triple (тройку), и затем программа переходит к этапу 840, чтобы классифицировать следующее Основное Событие. Если условие этапа 810 не выполняется, программа переходит к этапу 814, чтобы проверить, включает ли в себя Основное Событие разрыв (т.е. переход начало-конец-начало). Если Основное Событие включает в себя разрыв, программа переходит к этапу 816, чтобы проверить, превышает ли значение EVV более чем в 2,2 раза значение VVM, и если выполняются условия как этапа 814, так и этапа 816, программа классифицирует Основное Событие на этапе 818 как Triple (тройку) и затем переходит к этапу 840, чтобы классифицировать следующее Основное Событие. Если условие либо этапа 814, либо этапа 816 не выполняется, программа переходит к этапу 820.
На этапе 820, если EVV более чем в 2,9 раза превышает VVM, так что условие этапа 820 выполняется, программа классифицирует Основное Событие на этапе 826 как Double (двойку), и переходит к этапу 840, чтобы классифицировать следующее Основное Событие. Если условие этапа 820 не выполняется, программа переходит к этапу 822, чтобы проверить, включает ли в себя Основное Событие разрыв (переход начало-конец-начало). Если Основное Событие включает в себя разрыв, программа переходит к этапу 824, чтобы проверить, превышает ли EVV в 1,2 раза значение VVM, и если условие как этапа 822, так и этапа 824 выполняется, программа классифицирует Основное Событие на этапе 826 как Double (двойку) и затем переходит к этапу 840, чтобы классифицировать следующее Основное Событие. Если условие либо этапа 822, либо этапа 824 не выполняется, программа переходит к этапу 828.
Если на этапе 828 EVV больше, чем 0,85 VVM, т.е. условие этапа 828 выполняется, программа классифицирует Основное Событие на этапе 832 как Single (единицу), а затем переходит к этапу 840, чтобы классифицировать следующее Основное Событие. Если условие этапа 828 не выполняется, программа переходит к этапу 830, чтобы проверить, превышает ли Протяженность События более чем в 0,6 раза характерное значение Протяженности. Если условие этапа 830 выполняется, программа классифицирует Основное Событие на этапе 832 как Single (единицу), а затем переходит к этапу 840, чтобы классифицировать следующее Основное Событие. Если условие этапа 830 не выполняется, программа классифицирует Основное Событие на этапе 834 как мусор, и затем переходит к этапу 840, чтобы классифицировать следующее Основное Событие.
Процесс Сравнения Групп
Фиг. 10A и 10B иллюстрируют Процесс 900A, 900B Сравнения Групп соответственно. Следует понимать, что фиг. 10A иллюстрирует Процесс 900A Сравнения Групп для варианта 200A с одной матрицей, поскольку он иллюстрирует этапы только для одной световой плоскости 210-1, тогда как фиг. 10B иллюстрирует Процесс 900B Сравнения Групп для варианта 200B с двумя матрицами, поскольку он иллюстрирует этапы для обеих световых плоскостей 210-1, 210-2. Процесс 900A, 900B Сравнения Групп выполняется программой после завершения процессов 400, 500, 600, 800 и их соответствующих промежуточных процессов, описанных выше в отношении данных, сгенерированных световой плоскостью 210-1 (для варианта 200A с одной матрицей) или данных, сгенерированных каждой из световых плоскостей 210-1, 210-2 (для варианта 200B с двумя матрицами). Как на фиг. 10A, так и на фиг. 10B, на этапе 902 количество отдельных Событий в каждой Группе (например, событий 999, 1000, 1001, 1002, 1003 на фиг. 8C) суммируется для определения количества семян в Группе. Предполагается, что количество суммированных дискретных Событий каждой Группы равно количеству семян, составляющих Группу.
Для варианта 200B с двумя матрицами выполняется дополнительный этап 904, на котором сравнивается общее количество семян Группы из каждой световой плоскости 210-1, 210-2, и большее количество сохраняется в памяти как количество семян для этой Группы. Например, Группа для первой световой плоскости 210-1 выявила пять отдельных Событий (т.е. 999, 1000, 1001, 1002, 1003), соответствующих пяти семенам. Однако вторая световая плоскость 210-2 может не разделить Группы S2-S5 семян на четыре отдельных События, потому что световая плоскость 210-2 может не выявить три канала выемки, если семена расположены таким образом, что сканирование второй световой плоскости выявляет только два канала выемки. Таким образом, в этом примере вторая световая плоскость 210-2 может выявить только четыре отдельных События, соответствующих четырем семенам. На этапе 904 подсчет семян первой световой плоскости, выявивший большее количество семян (т.е. пять семян), будет затем использоваться для общего подсчета семян Группы.
На этапе 906 после определения общего количества семян Группы и после определения Групповой Скорости (любым из способов, описанных выше для варианта 200A с одной матрицей или для варианта 200B с двумя матрицами), окончательный подсчет семян в Группе и средняя скорость семян затем выводится на устройство 130 отображения системы 100 контроля для просмотра оператором.
Следует понимать, что использование варианта 200B с двумя матрицами может повысить точность подсчета семян, потому что вторая световая плоскость 210-2 способна различать семена в третьем измерении, которые иначе не могли бы быть дифференцированы и подсчитаны при использовании варианта с одной матрицей и одной световой плоскостью, который способен обнаруживать семена только в двумерном пространстве. Таким образом, поскольку вариант осуществления с двумя матрицами дает большее количество семян, обнаруженных между двумя световыми плоскостями, вариант осуществления 200B с двумя матрицами обычно будет более точным, чем вариант осуществления 200A с одной матрицей. Однако использование второй световой плоскости 210-2 требует вдвое большей вычислительной мощности по сравнению с использованием одной световой плоскости (например, 12 входов по сравнению с 24 входами в приведенном примере). На основании тестирования было показано, что подсчет семян с использованием варианта 200A с одной матрицей имеет точность подсчета семян 90% (т.е. измеренное количество семян было в пределах 10% от истинного количества семян). Вариант осуществления 200B с двумя матрицами увеличил точность подсчета семян до 97% (т.е. измеренное количество семян было в пределах 3% от истинного количества семян). Однако для пневматических сеялок даже 90%-ная точность подсчета семян является чрезвычайно точной. Соответственно, с учетом дополнительной вычислительной мощности, необходимой для варианта 200B с двумя матрицами, использование варианта 200A с одной матрицей может быть адекватным для многих, если не для большинства применений пневматической сеялки.
Пневматическая сеялка
На фиг. 11 показан вид сбоку обычной пневматической сеялки 10 типа раскрытой в патентной публикации США № 20100264163 и патенте США № 8695396, которые во всей своей полноте включены в состав настоящего документа посредством ссылки. На фиг. 12 представлено схематическое изображение пневматической сеялки 10, показанной на фиг. 11, с узлом 200 счетчика частиц, расположенным на распределительной линии 58 пневматической сеялки 10. Система 10 пневматической сеялки показана как состоящая из пневматической тележки 11 и грунтозацепного орудия 24. Пневматическая тележка 11 имеет бункеры 12, 14 для хранения семян, удобрений или других гранулированных продуктов для доставки в почву. Бункеры 12, 14 установлены на раме 16, поддерживаемой опорными колесами 18, для перемещения вперед по земле буксировочным транспортным средством (на чертеже не показано), соединенным с передним сцепным устройством 20. Грунтозацепное орудие 24 имеет раму 26, поддерживаемую опорными колесами 28 и соединенную с задней частью рамы 16 пневматической тележки с помощью сцепки 30. Рама 26 несет на себе множество высевающих секций 60. В альтернативных компоновках грунтозацепное орудие 24 может располагаться перед пневматической тележкой 11, или грунтозацепное орудие 24 и пневматическая тележка 11 могут располагаться на общей раме. Таким образом, подразумевается, что все ссылки на систему 10 пневматической сеялки или, для краткости, на "пневматическую сеялку" 10 относятся к каждому из вышеупомянутых устройств.
Функционирование пневматической сеялки
Обратимся к фиг. 12, пневматическая сеялка 10 включает в себя систему 34 распределения воздуха, подобную раскрытой в патенте США № 6213690, который во всей своей полноте включен в настоящий документ посредством ссылки. Система 34 распределения воздуха включает в себя вентилятор 36 для направления воздуха через главный трубопровод 38. На дне каждого бункера 12, 14 имеется дозирующий механизм 40 для подачи дозированных количеств семян, удобрений или других гранулированных продуктов через каналы 42, 44 продукта из соответствующих бункеров 12, 14 в основные каналы 38 (на фиг. 10 и 11 показан только один основной канал 38). Продукт, дозируемый дозирующим механизмом 40 в основные трубопроводы 38, переносится воздушным потоком в расположенную ниже по потоку распределительную башню 50. Обычно у каждого основного трубопровода 38 имеется одна башня 50. Кроме того, отдельные основные трубопроводы 38 могут предусматриваться для каждого из соответствующих бункеров, так что различные продукты, содержащиеся в этих соответствующих бункерах 12, 14, могут раздельно распределяться в соответствующую башню 50 для доставки через отдельные распределительные линии 58 в отдельные высевающие секции 60, как описано ниже. В качестве альтернативы, продукты из соответствующих бункеров 12, 14 могут объединяться в общем основном трубопроводе 38, как показано на фиг. 12, для совместного распределения. Хотя показаны два бункера 12, 14 с соответствующими дозирующими механизмами 40 и основными трубопроводами 38, следует понимать, что на пневматической сеялке 10 при необходимости может предусматриваться любое количество бункеров, дозирующих механизмов 40 и основных трубопроводов 38.
Дозирующий механизм 40 может быть механизмом объемного дозирования, но может быть и любым другим подходящим дозирующим механизмом, известным в данной области техники или разработанным в будущем. Как упоминалось выше, продуктопроводы 42, 44 направляют продукт из дозирующего механизма 40 в основные каналы 38, которые переносят продукт в воздушном потоке в расположенные ниже по потоку распределительные башни 50. Каждая башня 50 имеет верхнюю распределительную головку 52, расположенную на самом верхнем конце вертикальной распределительной трубы 54. Головка 52 равномерно разделяет поток продукта в несколько распределительных линий 58. Каждая распределительная линия 58 доставляет продукт в высевающую секцию 60, расположенную ниже по потоку. Высевающая секция 60 открывает борозду 62 в поверхности почвы. Распределительная линия укладывает продукт в борозду 62, а прицепное уплотняющее или закрывающее колесо 64 (фиг. 11) уплотняет почву над уложенным продуктом. Хотя у высевающей секции 60 на фиг. 11 и 12 показана одна стойка с точкой для открытия борозды 62 и только одна распределительная линия 58 для каждой высевающей секции 60, следует понимать, что высевающая секция 60 может быть одноканальной, двухзаходной высевающей секцией, использующей отрезной диск и пыльник с двойными распределительными линиями 58 для подачи семян и удобрений в почву, как описано в патентах США №№ 8275525, 9826667 и 9968030, каждый из которых во всей своей полноте включен в состав настоящего документа посредством ссылки, и которые коммерчески воплощены в пневматической сеялке Case 500 Series.
По-прежнему обращаясь к фиг. 12, дозирующие механизмы 40 включают в себя приводы 72, 74 измерителей с регулируемой частотой вращения, подключенные к соответствующим расходомерам 76, 78 продукта, расположенным на дне соответствующих бункеров 12, 14. Когда приводы 72, 74 вращают соответствующие расходомеры 76, 78, продукт из соответствующих бункеров 12, 14 подается через соответствующие продуктопроводы 42, 44 в главный трубопровод 38, который, в свою очередь, транспортирует продукт в распределительную башню 50. Контроллер 84 скорости подачи соединен с приводами 72, 74 расходомеров с регулируемой частотой вращения.
Контроллер 84 скорости подачи находится в сигнальной связи с контроллером 110 системы 100 контроля (рассматриваемой позже). Помимо того, что контроллер 110, выполняет программу 101 программного обеспечения для выполнения каждого из описанных выше процессов 400, 500, 600, 800, 900, контроллер 110 также связан с датчиком скорости 168, который определяет путевую скорость пневматической сеялки 10. Контроллер 110 управляет контроллером 84 скорости подачи, чтобы регулировать скорости приводов дозатора для поддержания выбранной скорости подачи продукта при изменении скорости движения. В одном из альтернативных вариантов осуществления, контроллер 84 скорости подачи может подсоединяться таким образом, чтобы приводиться в действие в зависимости от скорости движения трактора по земле через трансмиссию с передаточным числом, которое регулируется из кабины трактора. Контроллер 110 также связан с приемником 166, 131 GPS. Контроллер 110 управляет контроллером 84 скорости подачи, чтобы регулировать норму дозирования в зависимости от расположения пневматической сеялки в поле. Как рассматривается ниже, система 100 контроля включает в себя устройство ввода, такое как графический интерфейс 112 пользователя, позволяющий оператору задавать желаемую скорость подачи продукта, например, фунтов на акр или семян на акр и т.д.
Сеялка точного высева
На фиг. 13 представлен вид сбоку одной из множества высевающих секций 310 обычной сеялки 300 с системой 200 счетчика частиц, расположенной на семяпроводе 332 высевающей секции 310, для подсчета семян, когда они падают под действием силы тяжести через семяпровод 332. Каждая высевающая секция 310 поддерживается инструментальной балкой 314 с помощью параллельного рычажного механизма 316, который позволяет каждой высевающей секции перемещаться вертикально независимо от инструментальной балки и других разнесенных высевающих секций, чтобы приспособиться к изменениям ландшафта или при столкновении высевающей секции с камнем или другим препятствием при движении сеялки по полю. Каждая высевающая секция 310 может включать в себя передний монтажный кронштейн 320, на котором установлена опорная балка 322 бункера и подрамник 324. Опорная балка 322 бункера поддерживает бункер 326 с посевным материалом и бункер 328 с удобрениями, а также при работе поддерживает дозатор 330 семян и семяпровод 332. Подрамник 324 включает в себя продолжающийся вниз хвостовик 325, который при работе поддерживает узел 334 открытия борозды. Узел 336 закрытия борозды при работе поддерживается задним концом подрамника 324. Узел 334 открытия борозды может включать в себя один или несколько дисков 344 открытия борозды, которые при работе поддерживаются хвостовиком 325. Узел 334 открытия борозды может включать в себя одно или несколько копирующих колес 348, которые во время работы поддерживаются на подрамнике 324 поворотными рычагами копирующих колес. Регулятор глубины 368 может выборочно позиционироваться для изменения глубины погружения дисков 344 открытия борозды относительно копирующих колес 348, чтобы изменять глубину борозды, образуемой дисками открытия борозды.
Датчик 164 качества езды, который может представлять собой акселерометр, может устанавливаться на высевающей секции 310 для измерения вертикальной скорости и ускорения высевающей секции 310. Датчики 168 скорости, такие как радиолокационные датчики скорости или датчики скорости системы GPS, могут устанавливаться на инструментальной балке 314 или на высевающей секции 310. Привод 318 прижимного усилия, такой как воздушная подушка, гидравлический или пневматический цилиндр и т.п., воздействует на параллельный рычажный механизм 316, прикладывая прижимное усилие к высевающей секции 310. Клапан 174 прижимного усилия, например, сервоклапан с электрическим приводом, может управлять величиной прижимного усилия, прикладываемого приводом 318 прижимного усилия.
В процессе работы, когда сеялка 300 движется в прямом направлении, показанном стрелкой 311, узел 334 открытия борозды прорезает борозду 338 в поверхности почвы. Семенной бункер 326, в котором хранятся семена для посадки, обеспечивает постоянную подачу семян в дозатор 330 семян. В альтернативном варианте осуществления, сеялка 300 точного высева может представлять собой сеялку с центральной загрузкой, содержащую установленный на раме бункер для сыпучих продуктов, известный из уровня техники; в таких вариантах осуществления семенной бункер 326 может представлять собой небольшой вспомогательный бункер, сообщающийся с бункером для сыпучих продуктов. Дозатор 330 семян выборочно взаимодействует с приводом 172 через сцепление 170, так что отдельные семена дозируются и выгружаются в семяпровод 332 с равными промежутками времени в зависимости от желаемого количества семян и скорости, с которой сеялка 300 буксируется по полю. Привод 172 и сцепление 170 могут относиться к типам, раскрытым в патенте США № 8307771, который во всей своей полноте включен в состав настоящего документа посредством ссылки. В других вариантах осуществления сцепление 170 отсутствует, а приводы 172 представляют собой электрические приводы, такие как раскрытые в международной публикации заявителя WО2017011355, которая во всей своей полноте включена в состав настоящего документа посредством ссылки. Узел 200 датчика частиц поддерживается семяпроводом 332 и обнаруживает прохождение семян через семяпровод 332. Семена падают с конца семяпровода 332 в борозду 338 и покрываются почвой посредством узла 336 закрывающих колес. Как и в варианте осуществления пневматической сеялки, в сеялке 300 точного высева устройство 130 отображения, модуль 120 связи и контроллер 110 могут устанавливаться в кабине трактора, буксирующего сеялку 300 точного высева по полю. На тракторе также могут устанавливаться один или несколько датчиков 168 скорости, таких как датчик частоты вращения колеса, работающий на эффекте Холла, или радиолокационный датчик скорости.
Система контроля
На фиг. 14 схематически представлена система 100 контроля для использования с пневматической сеялкой 10 или сеялкой 300 точного высева. Система 100 контроля включает в себя контроллер 110, содержащий центральный процессор 116 и графический интерфейс 112 пользователя, память 114, которая хранит программное обеспечение, выполняющее процессы 400, 500, 600, 800, 900 и другие описанные выше процессы. Система 100 контроля может также включать в себя модуль 120 связи и устройство 130 отображения. Устройство 130 отображения, модуль 120 связи и контроллер 110 могут устанавливаться в кабине трактора. Контроллер 110 электрически связан с модулем 120 связи посредством жгута 150 проводов. Модуль 120 связи может включать в себя микросхему 122 аутентификации и память 126. Модуль 120 связи электрически связан с устройством 130 отображения посредством жгута 152 проводов. Устройство 130 отображения может включать в себя графический интерфейс 132 пользователя, память 134, ЦП 136 и беспроводное интернет-соединение 154 для подключения к "облачному" серверу 140 хранения. Одно из таких беспроводных интернет-соединений 154 может представлять собой сотовый модем 138. В качестве альтернативы, беспроводное интернет-соединение 154 может представлять собой беспроводной адаптер 139 для установления интернет-соединения через беспроводной маршрутизатор.
Устройство 130 отображения может представлять собой потребительское вычислительное устройство или другое многофункциональное вычислительное устройство. Устройство 130 отображения может содержать программное обеспечение общего назначения, включая интернет-браузер. Устройство 130 отображения также может включать в себя датчик 137 движения, такой как гироскоп или акселерометр, и может использовать сигнал, генерируемый датчиком 137 движения, для определения желаемой модификации графического интерфейса 132 пользователя. Устройство 130 отображения может также включать в себя цифровую камеру 135, при этом изображения с камеры 135 могут привязываться к координатам глобальной системы позиционирования (GPS), сохраняться в памяти 134 и передаваться на сервер 140 облачного хранения. Устройство 130 отображения также может включать в себя приемник 131 GPS.
При работе, как показано на фиг. 15, система 100 контроля может выполнять процесс, обозначенный в целом ссылочной позицией 1500. Обращаясь к фиг. 15 в сочетании с фиг. 14, на этапе 1505 модуль 120 связи выполняет необязательную процедуру аутентификации, в ходе которой модуль 120 связи принимает первый набор данных 190 аутентификации от устройства 110 контроля, а микросхема 122 аутентификации сравнивает данные 190 аутентификации с ключом, токеном или кодом, хранящимся в памяти 126 модуля 120 связи или передаваемым с устройства 130 отображения. Если данные 190 аутентификации верны, модуль 120 связи в предпочтительном варианте передает второй набор данных 191 аутентификации на устройство 130 отображения, так что устройство 130 отображения разрешает передачу других данных между устройством 110 контроля и устройством 130 отображения через модуль 120 связи.
На этапе 1510 устройство 110 контроля принимает ввод конфигурации, задаваемый пользователем через графический интерфейс 112 пользователя. В некоторых вариантах осуществления графический интерфейс 112 пользователя может отсутствовать, и пользователь может вводить конфигурацию через графический интерфейс 132 пользователя устройства 130 отображения. Ввод конфигурации может включать в себя такие параметры, как пространственные смещения между приемником 166 GPS и высевающими секциями 60, 300 соответствующей пневматической сеялки 10 или сеялки 300 точного высева, а также рабочие параметры пневматической сеялки 10 или сеялки 300 точного высева (например, параметры сцепления 170, приводов 172 и клапанов 174 прижимного усилия). Затем устройство 110 контроля передает окончательные данные 188 конфигурации на устройство 130 отображения через модуль 120 связи.
На этапе 1512 устройство 130 отображения может получить доступ к файлам 186 данных предписания с сервера 140 облачного хранилища. Файлы 186 данных предписания могут включать в себя файл (например, файл формы), содержащий географические границы (например, границы поля) и географические местоположения (например, координаты GPS), привязанные к рабочим параметрам (например, нормой высева семян). Устройство 130 отображения может позволять пользователю редактировать файл 186 данных предписания, используя графический интерфейс 132 пользователя. Устройство 130 отображения может реконфигурировать файл 186 данных предписания для использования контроллером 110 и передавать результирующие данные 185 предписания контроллеру 110 через модуль 120 связи.
На этапе 1514, когда пневматическая сеялка 10 или сеялка 300 точного высева движется по полю, контроллер 110 посылает командные сигналы 198 на сцепления, приводы и средства управления прижимным усилием. Эти командные сигналы 198 могут включать в себя сигналы для определения того, включено ли одно или несколько сцеплений, сигналы, определяющие скорость, с которой приводятся в действие приводы, и сигналы, определяющие прижимное усилие, прикладываемое к высевающим секциям 60, 310.
На этапе 1515, когда сеялка 10 или сеялки 300 точного высева движется по полю, контроллер 110 получает исходные данные 181 о применении, включая сигналы от узла 200 датчика частиц, датчиков 162 прижимного усилия, датчиков 164 качества езды, датчиков GPS и датчиков скорости 168. Контроллер 110 обрабатывает исходные данные 181 о применении и сохраняет упомянутые данные о применении в памяти 134. Контроллер 110 может передавать обработанные данные 182 о применении в устройство 130 отображения через модуль 120 связи. Обработанные данные 182 о применении могут быть потоковыми, фрагментарными или частичными данными. Следует понимать, что согласно способу 1500, управление орудием и хранение данных выполняются контроллером 110 таким образом, что если устройство 130 отображения перестает функционировать, удаляется из системы 100 контроля или используется для других функций, сохранение операций орудия и важных данных не прерывается.
На этапе 1520 устройство 130 отображения принимает и сохраняет в памяти 134 обработанные в реальном масштабе времени данные 182 о применении. На этапе 1525 устройство 130 отображения может визуализировать карту обработанных данных 182 о применении (например, карту популяции). На этапе 1530 устройство 130 отображения может отображать числовую совокупность данных о применении (например, популяцию, высеянную высевающей секцией за последние 5 секунд). На этапе 1535 устройство 130 отображения может сохранять в памяти 134 местоположение, размер и другие характеристики отображения изображений карты приложения, визуализированных на этапе 1525. На этапе 1538, после завершения операций посева или посадки, устройство 130 отображения может передать файл 183 обработанный данных о применении на сервер 140 облачного хранилища. Файл 183 обработанных данных о применении может быть полным файлом (например, файлом данных). На этапе 1540 устройство 110 контроля может сохранять в памяти 114 завершенные данные о применении (например, в файле данных).
Способ картографирования и отображения данных 182 о применении может быть таким же или аналогичным картам данных о применении, раскрытым в патенте США № 9699958, который во всей своей полноте включен в состав настоящего документа посредством ссылки.
Вышеприведенное описание и чертежи предназначены только для иллюстрации и не должны рассматриваться как ограничения изобретения. Специалистам в данной области техники очевидны различные модификации вариантов осуществления и общих принципов и характеристик системы и способов, описанных в данном документе. Таким образом, изобретение должно соответствовать самому широкому объему, согласующемуся с прилагаемой формулой изобретения, и полному объему эквивалентов, на которые распространяется эта формула изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕКЛЮЧАЕМАЯ МАТРИЦА СВЕТОВЫХ ЭЛЕМЕНТОВ И СПОСОБ ДЕЙСТВИЯ | 2007 |
|
RU2427983C2 |
| СИСТЕМЫ И УСТРОЙСТВА ДЛЯ СЕКВЕНИРОВАНИЯ С ВЫСОКОЙ ПРОПУСКНОЙ СПОСОБНОСТЬЮ С ДЕТЕКТИРОВАНИЕМ НА ОСНОВЕ ПОЛУПРОВОДНИКОВ | 2019 |
|
RU2755738C2 |
| СЕКВЕНИРОВАНИЕ С ВЫСОКОЙ ПРОПУСКНОЙ СПОСОБНОСТЬЮ С ДЕТЕКТИРОВАНИЕМ НА ОСНОВЕ ПОЛУПРОВОДНИКА | 2019 |
|
RU2831966C1 |
| СЕКВЕНИРОВАНИЕ С ВЫСОКОЙ ПРОПУСКНОЙ СПОСОБНОСТЬЮ С ДЕТЕКТИРОВАНИЕМ НА ОСНОВЕ ПОЛУПРОВОДНИКА | 2019 |
|
RU2742975C1 |
| СПОСОБ И СИСТЕМА ВЫЯВЛЕНИЯ КОНФИДЕНЦИАЛЬНЫХ ДАННЫХ | 2023 |
|
RU2838508C2 |
| СИСТЕМЫ И СПОСОБЫ ПРИМЕНЕНИЯ МАГНИТОЧУВСТВИТЕЛЬНЫХ ДАТЧИКОВ ДЛЯ ОПРЕДЕЛЕНИЯ ГЕНЕТИЧЕСКОЙ ХАРАКТЕРИСТИКИ | 2016 |
|
RU2709986C2 |
| СПОСОБ И СИСТЕМЫ ДЛЯ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОЙ СКОРОСТИ ПРОДУКТА | 2020 |
|
RU2819435C2 |
| ОБНОВЛЕНИЕ МИКРОСЕЙСМИЧЕСКИХ ГИСТОГРАММНЫХ ДАННЫХ | 2013 |
|
RU2605192C2 |
| Устройство для контроля работы пневматической сеялки | 1991 |
|
SU1782392A1 |
| ТВЕРДОТЕЛЬНОЕ УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ И СИСТЕМА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ | 2011 |
|
RU2479068C2 |
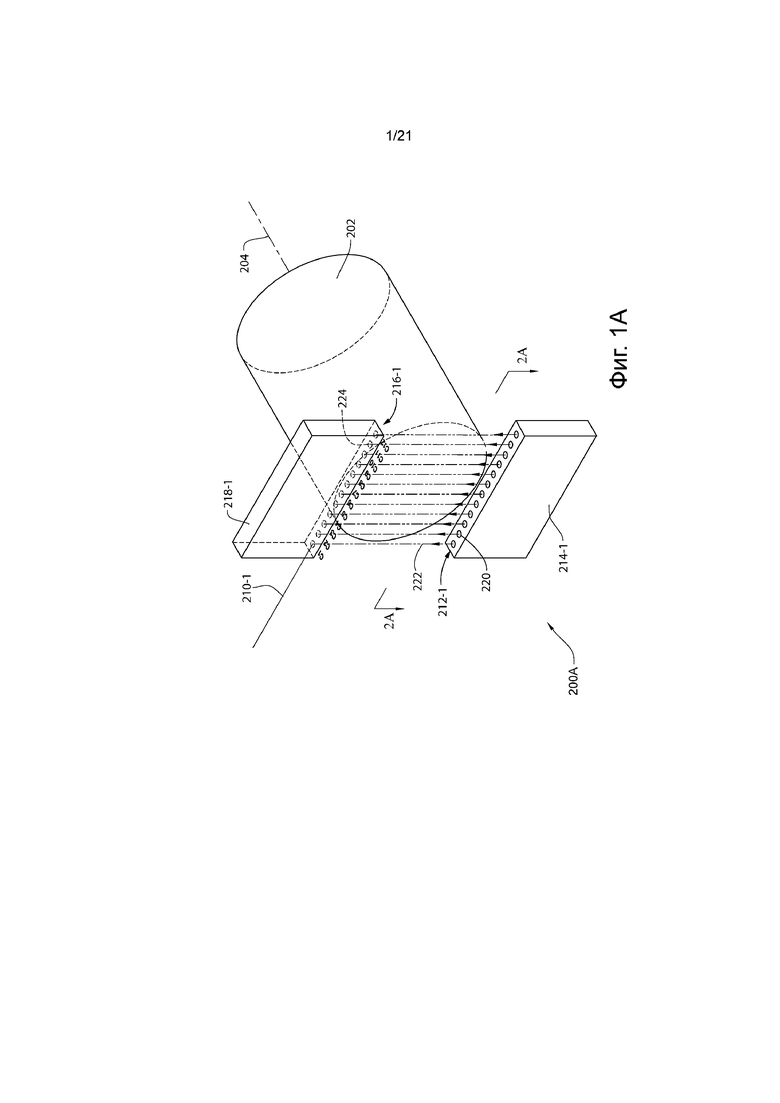
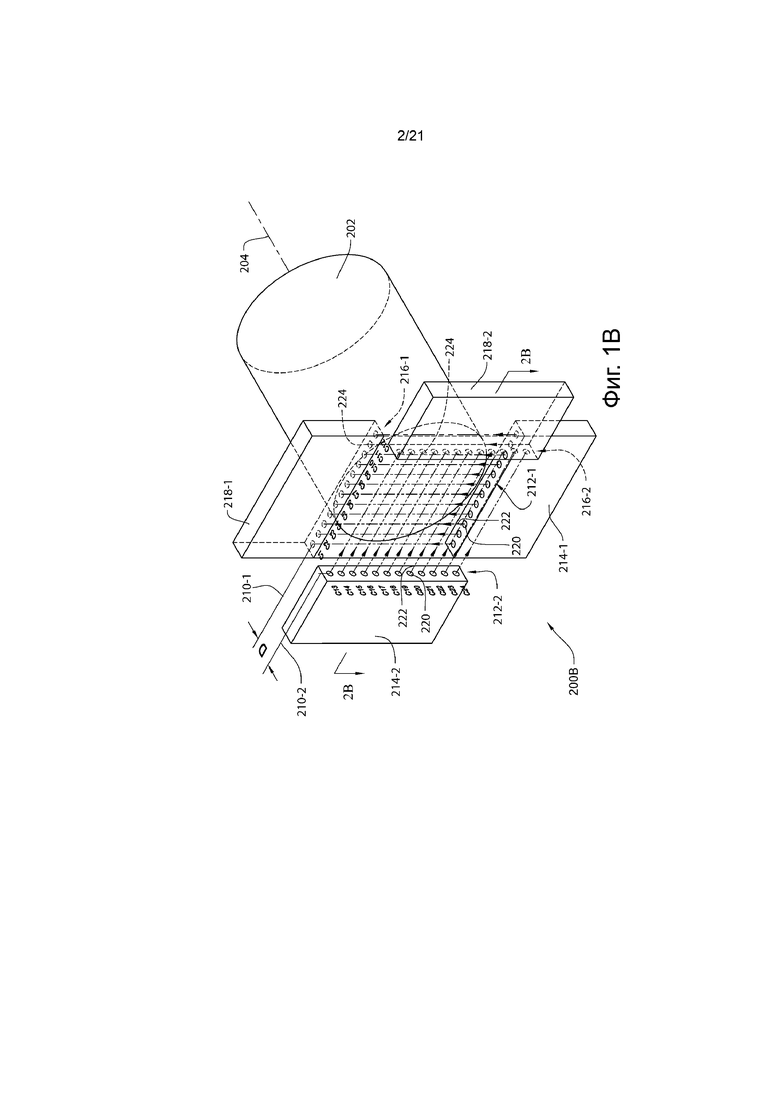
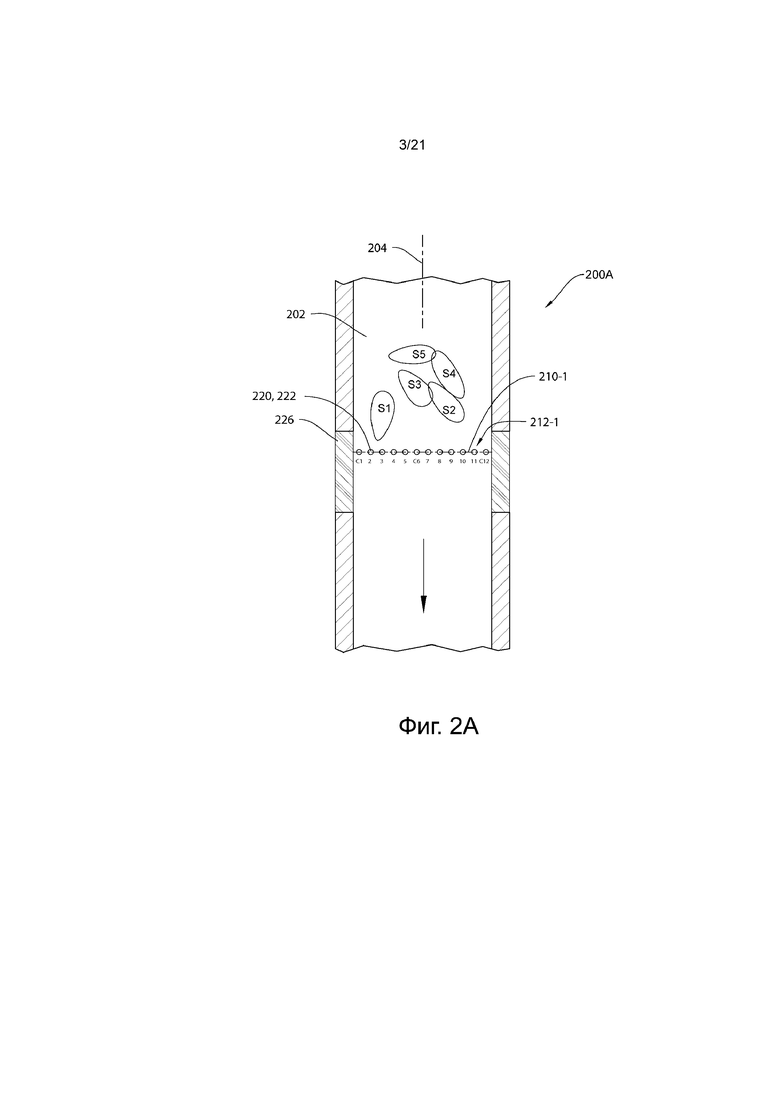
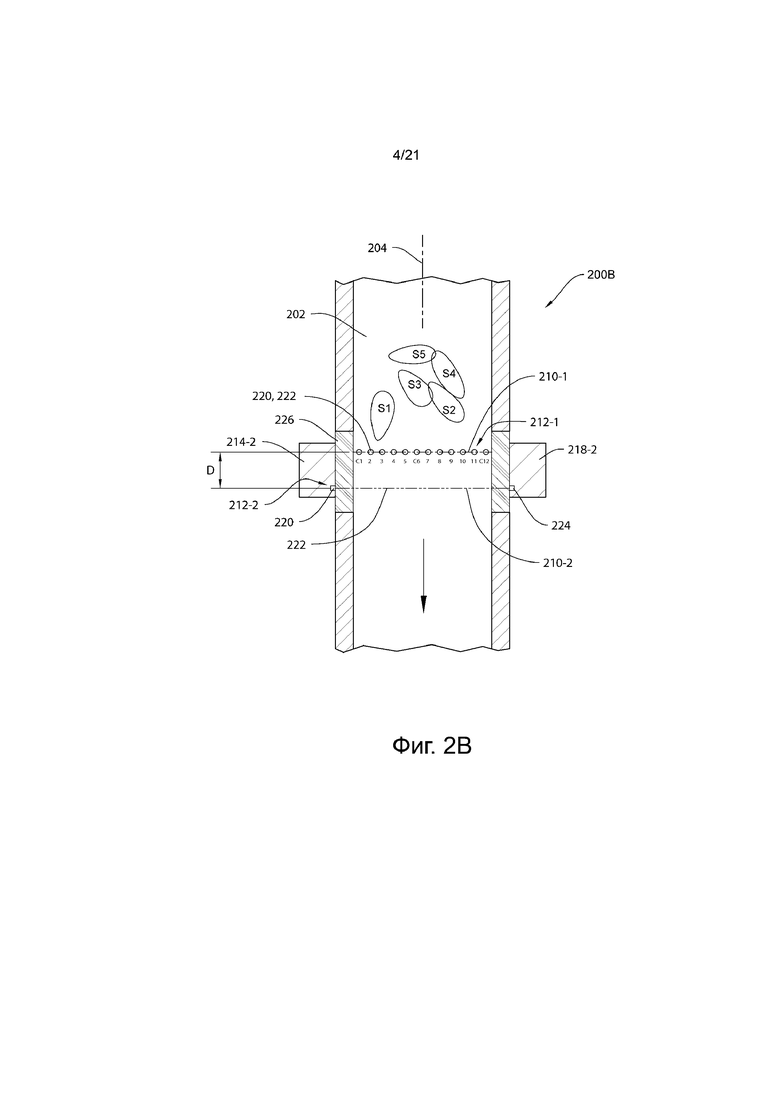
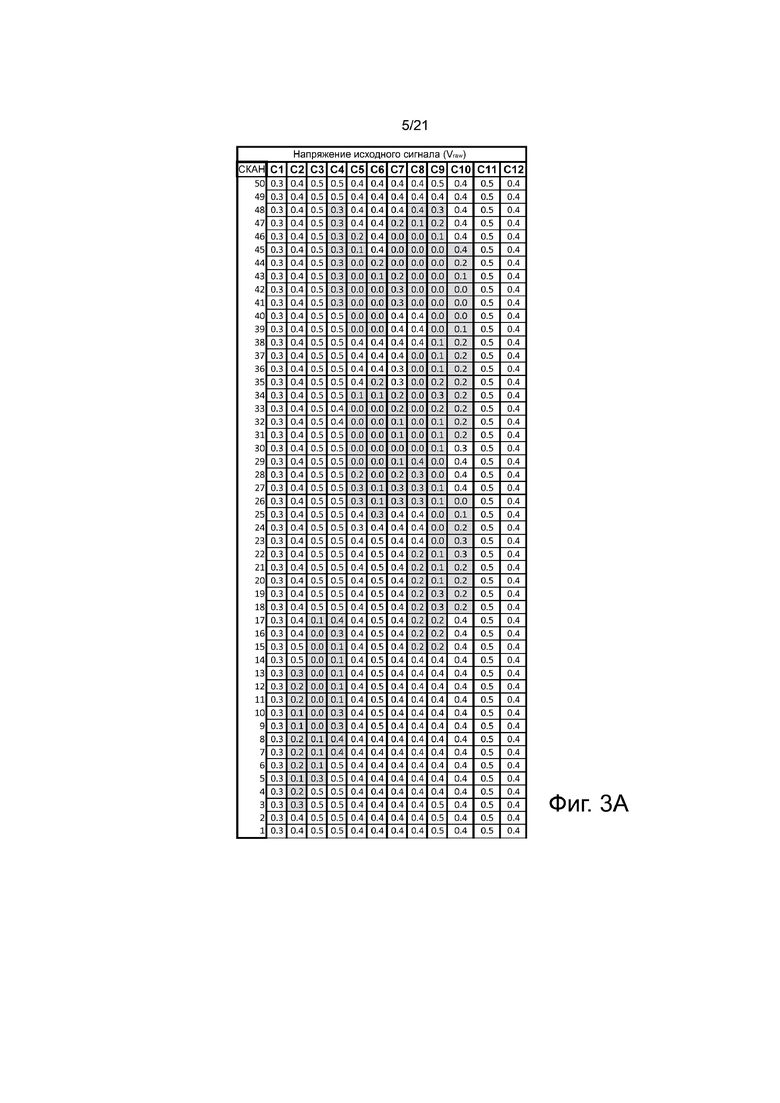
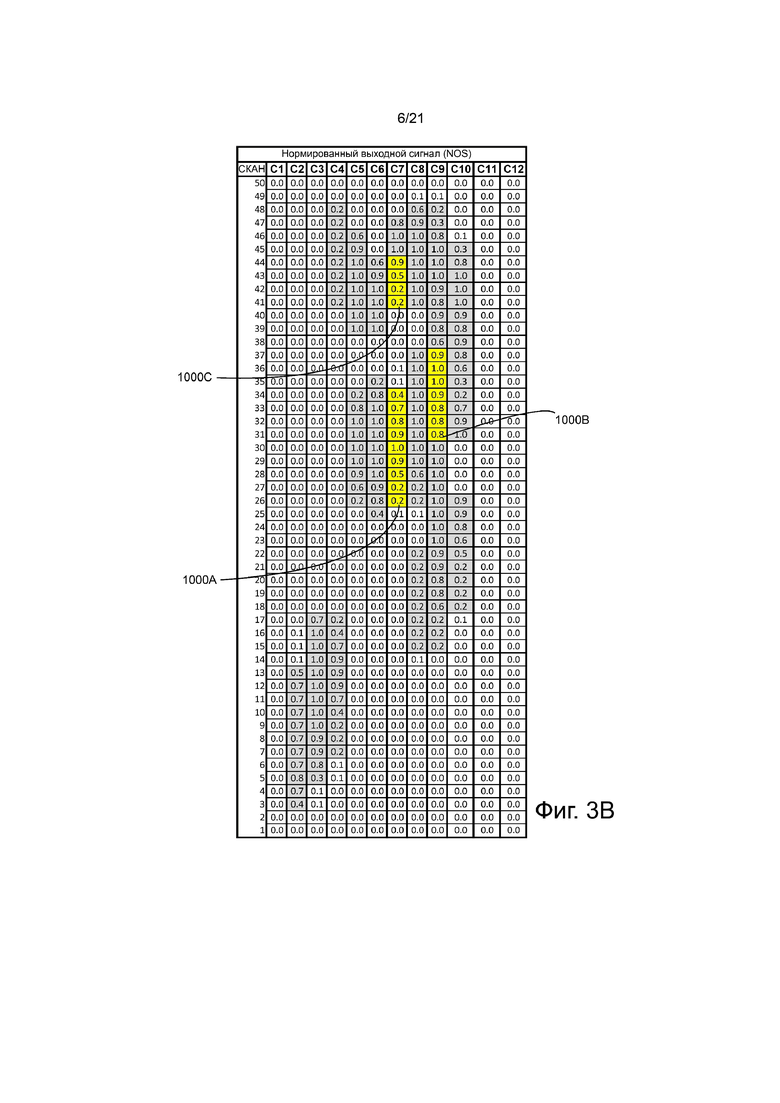
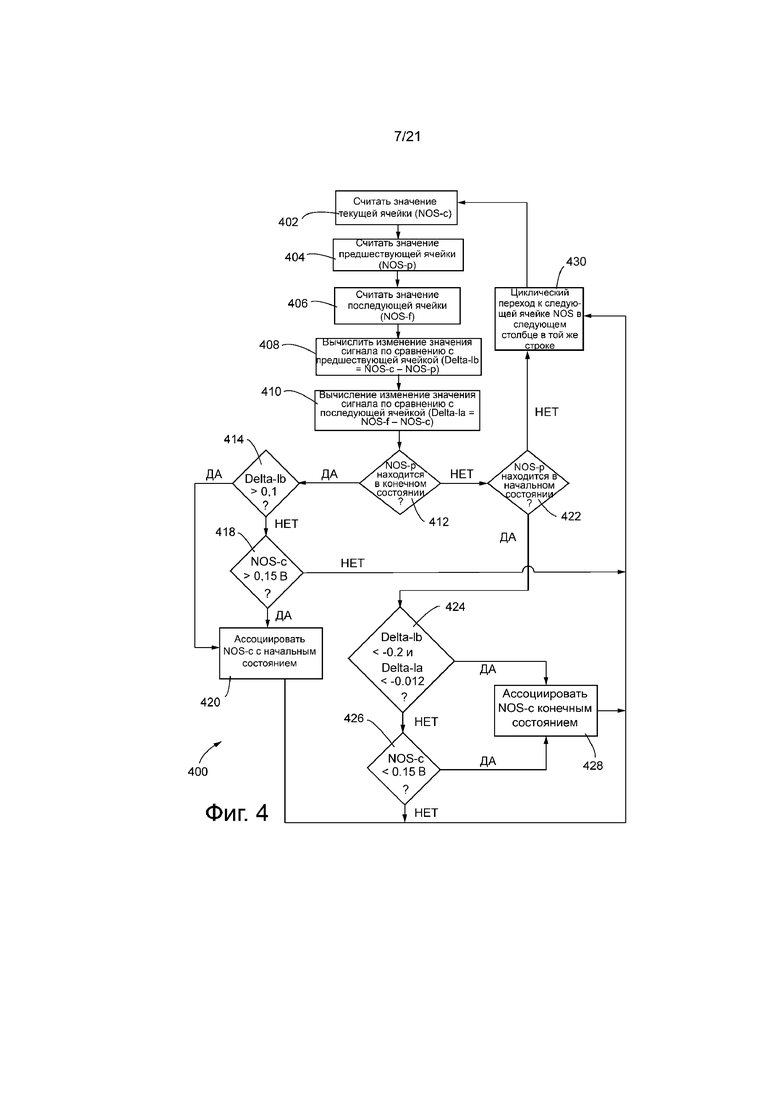
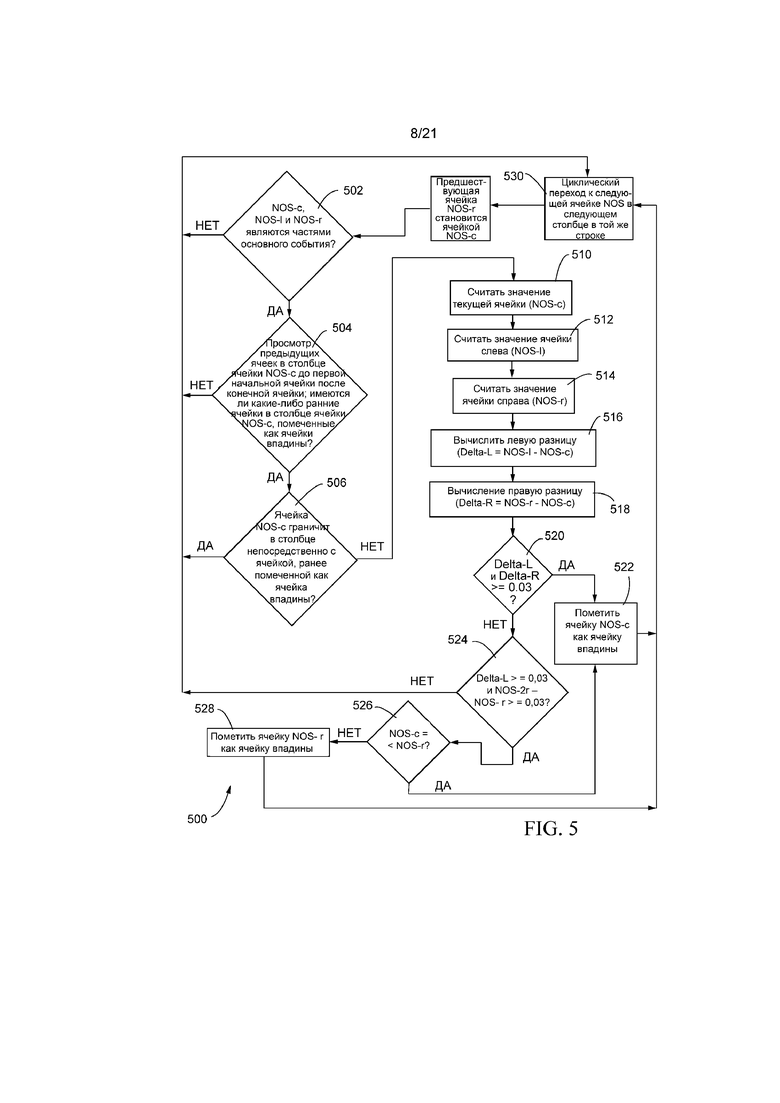
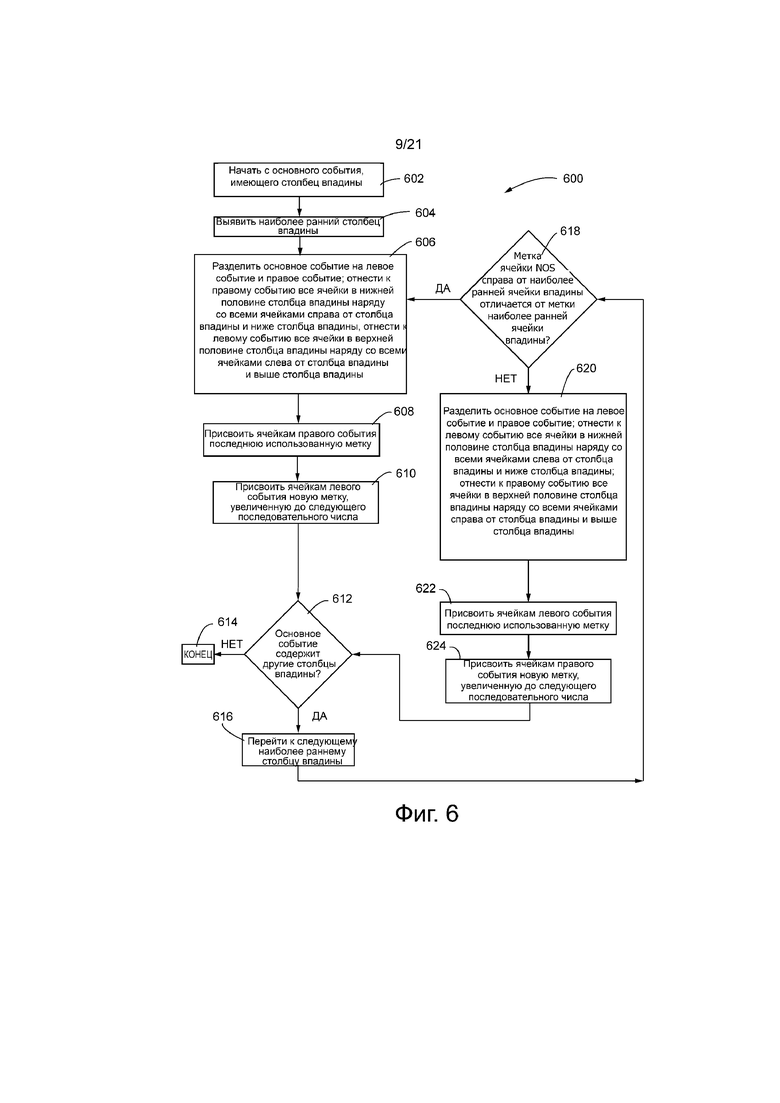
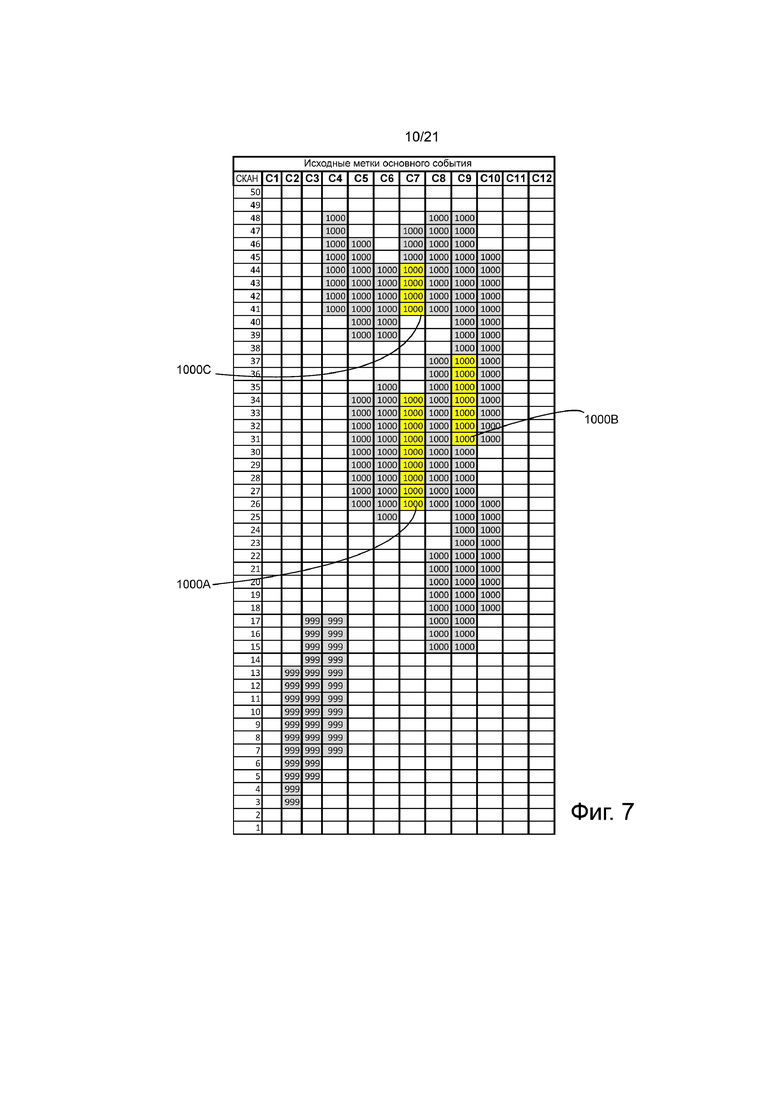
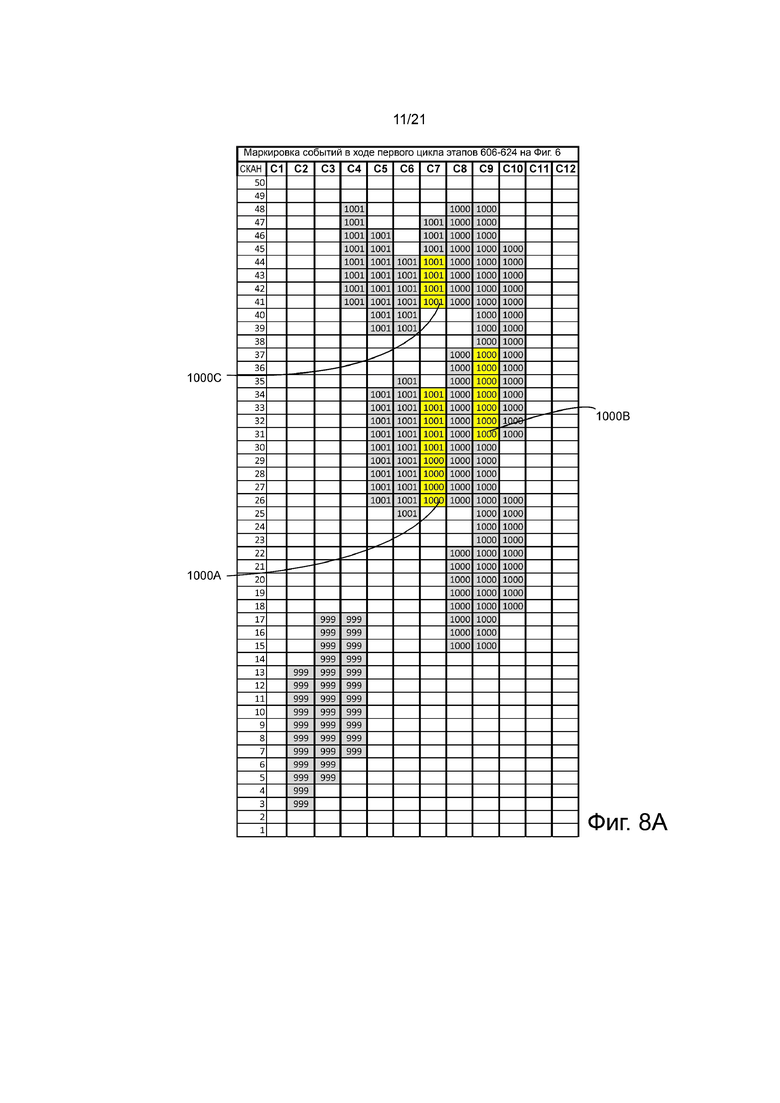
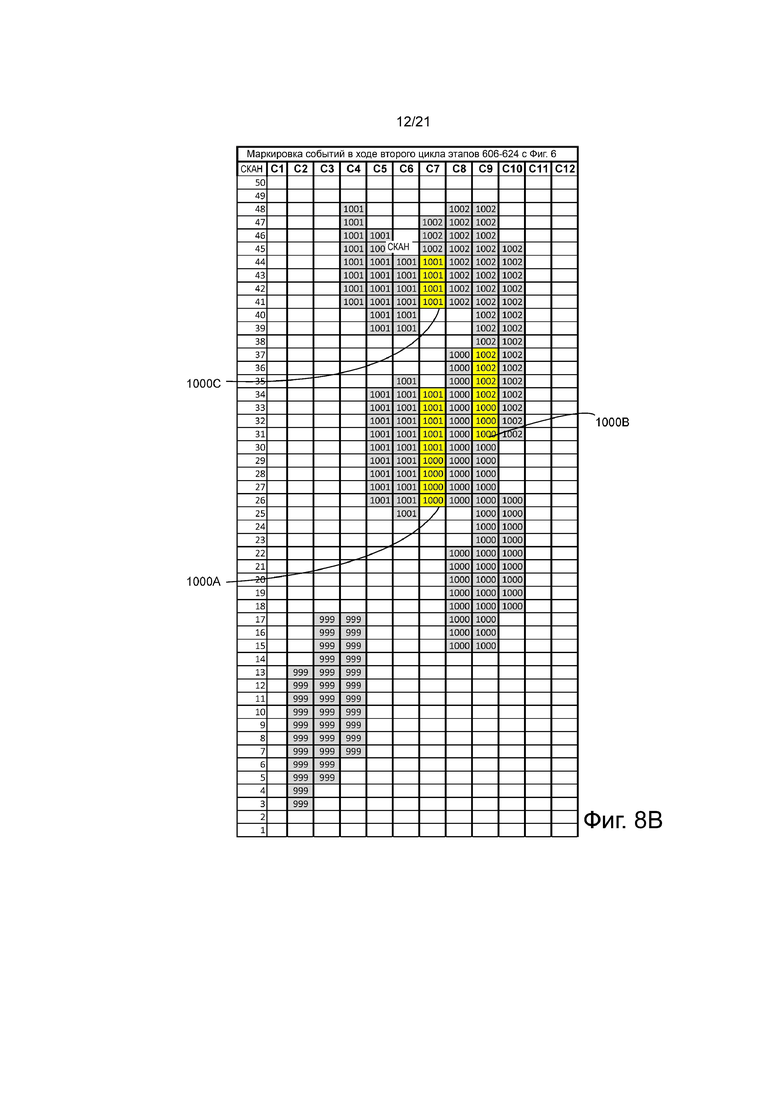
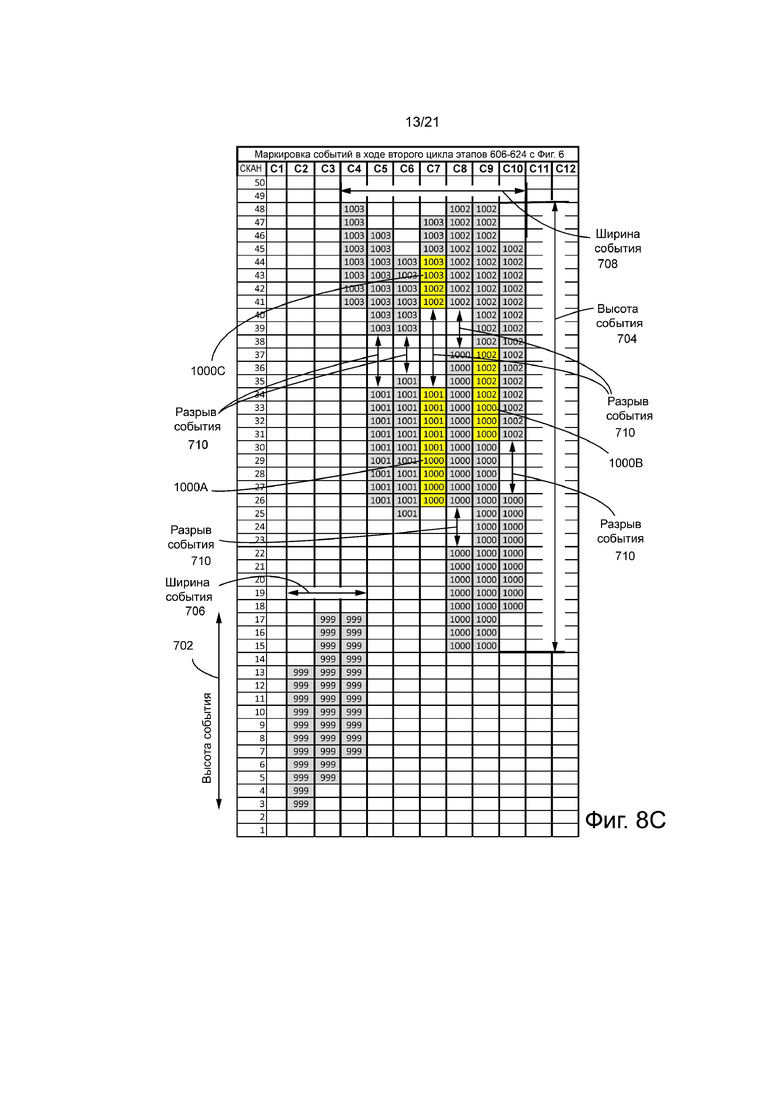
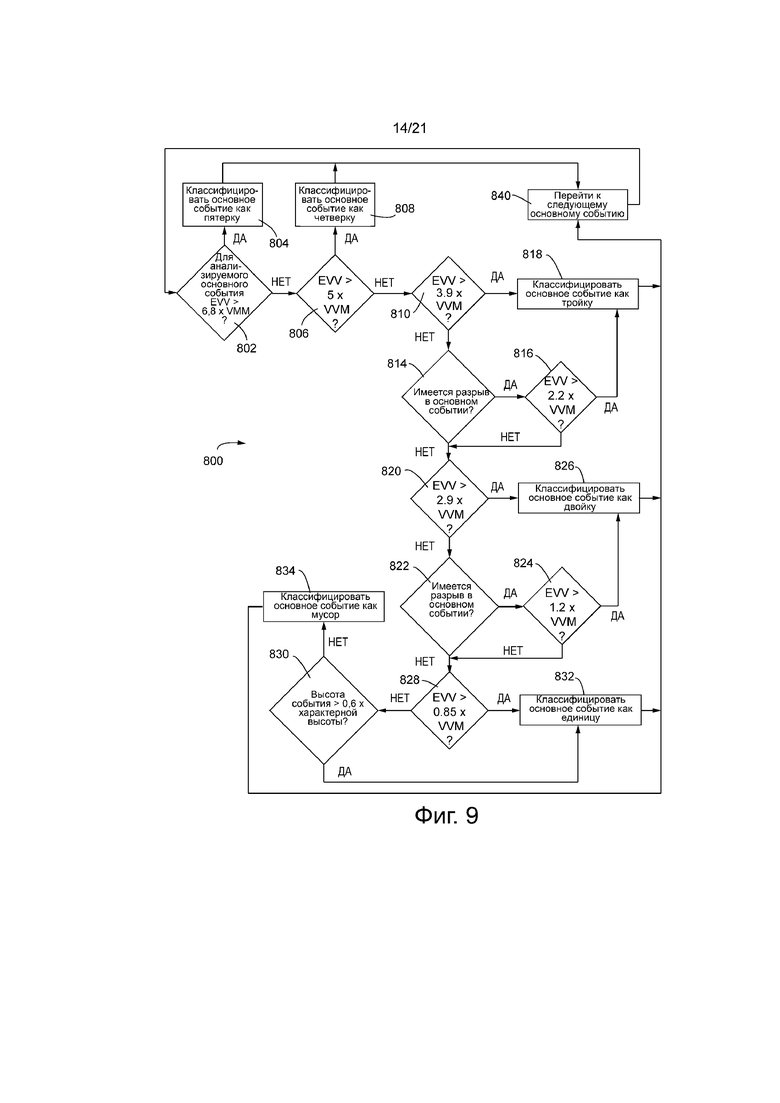
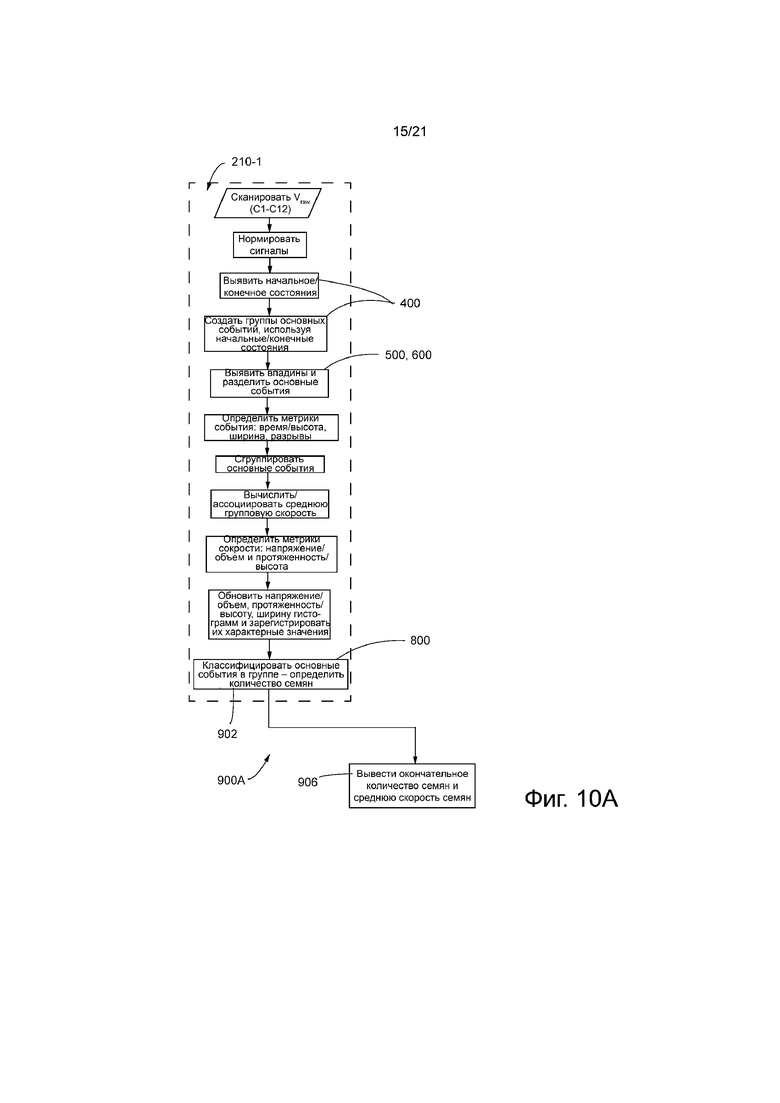
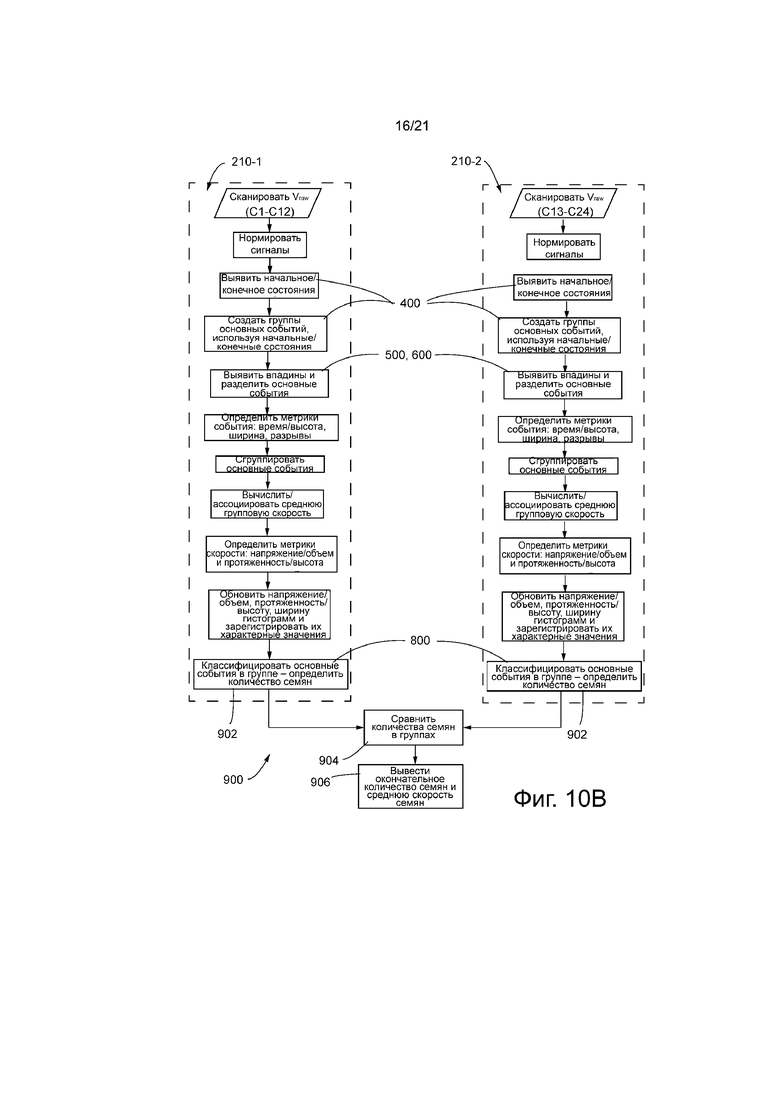
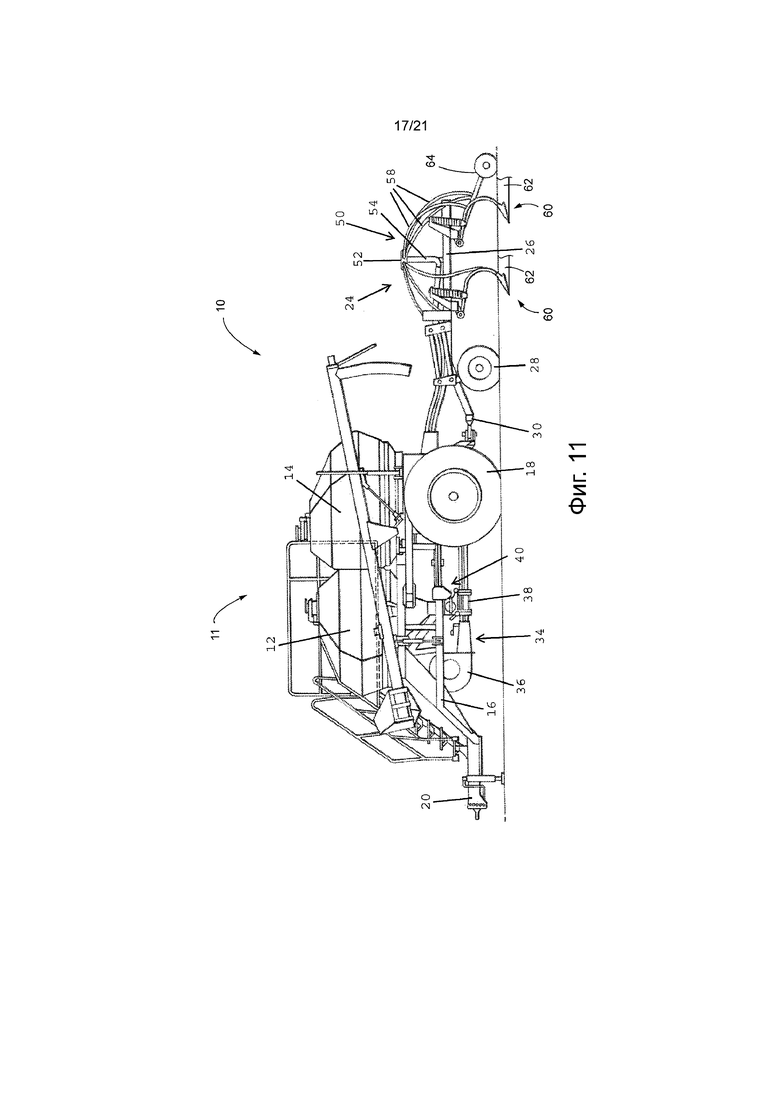
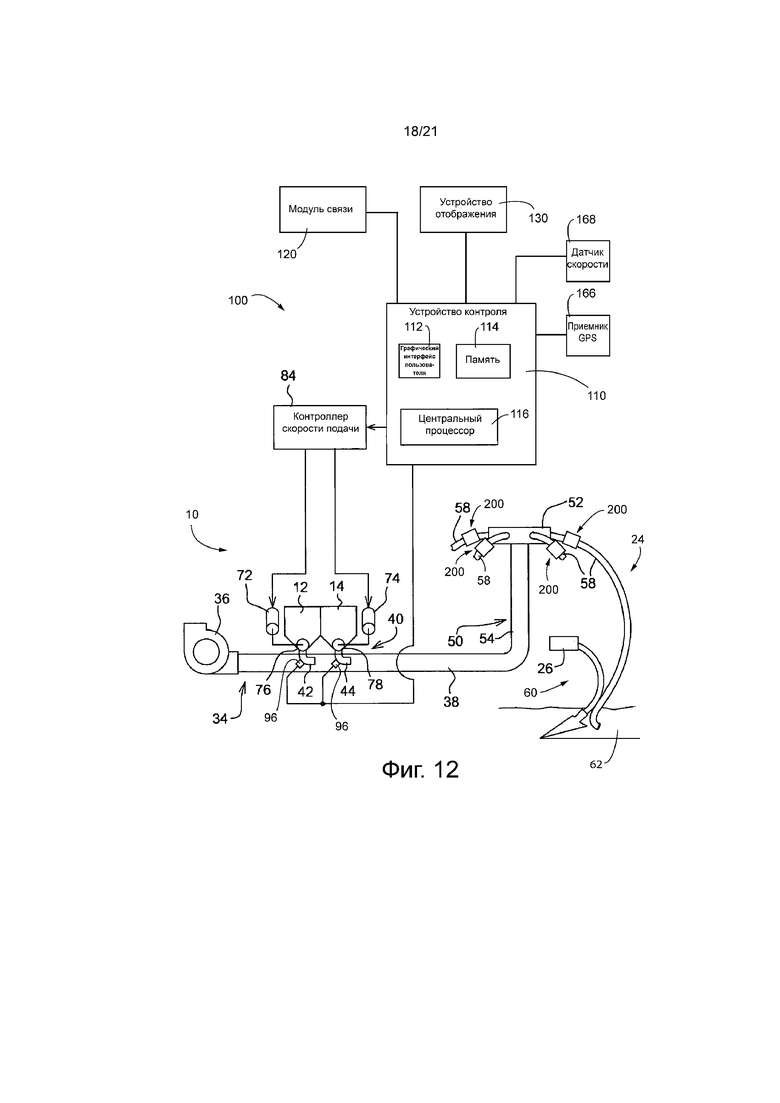
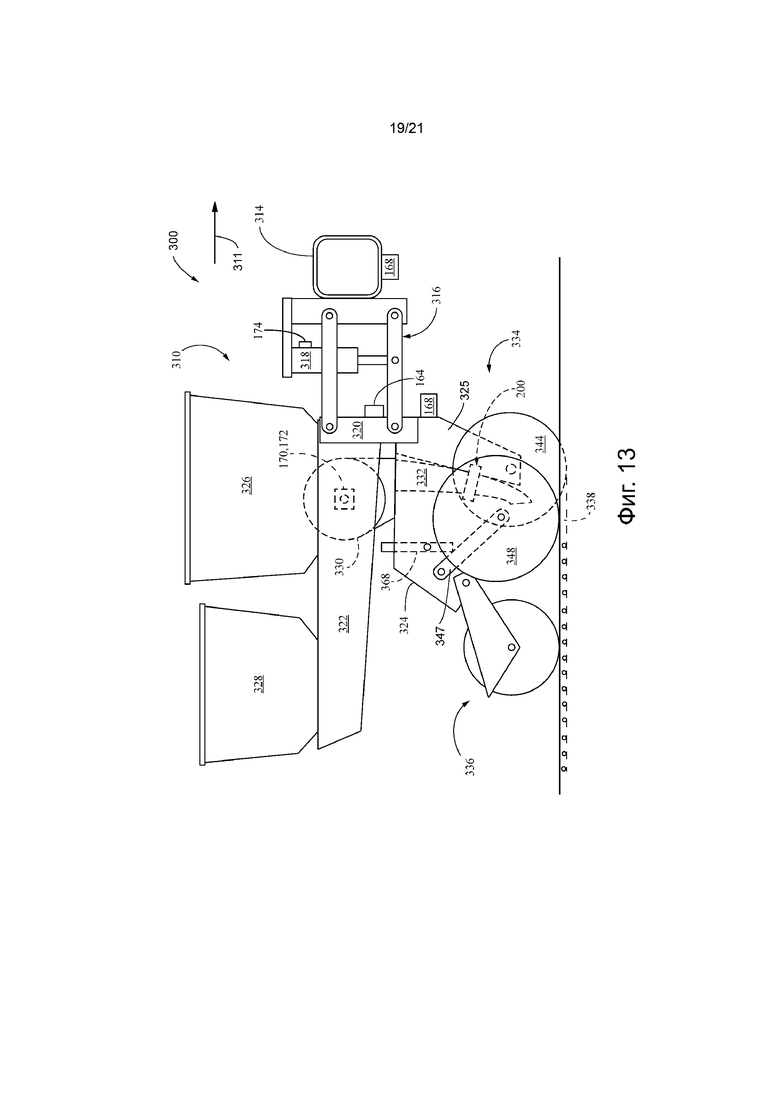
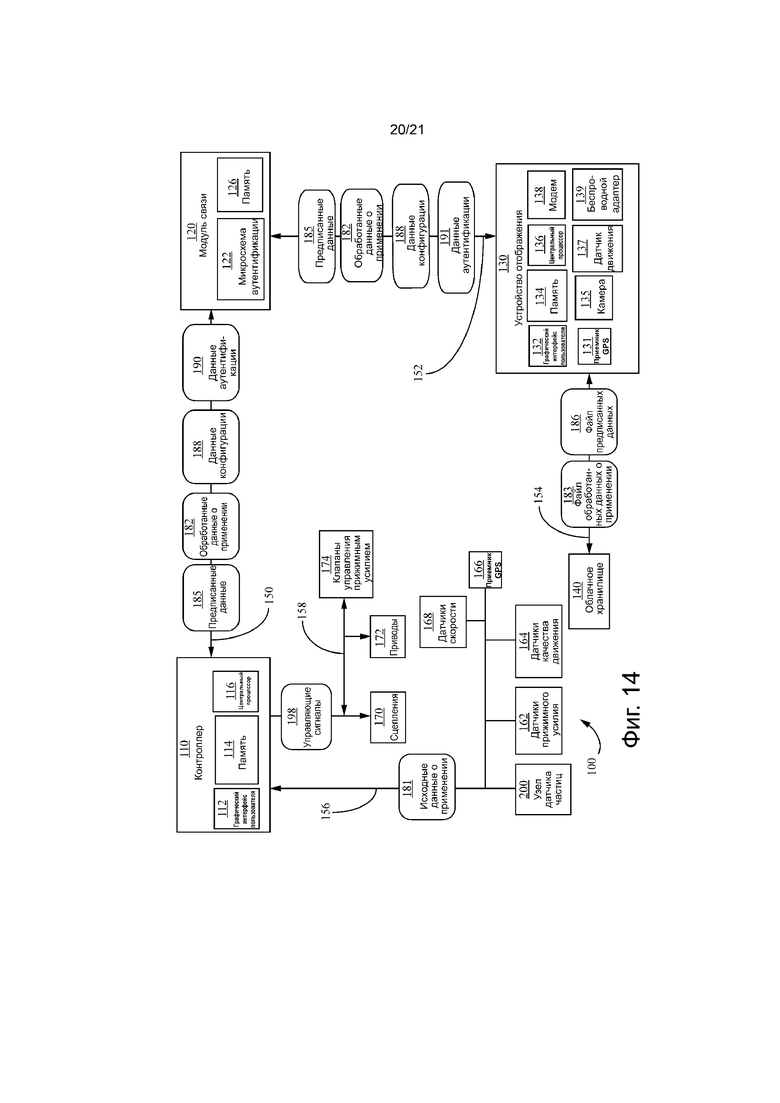
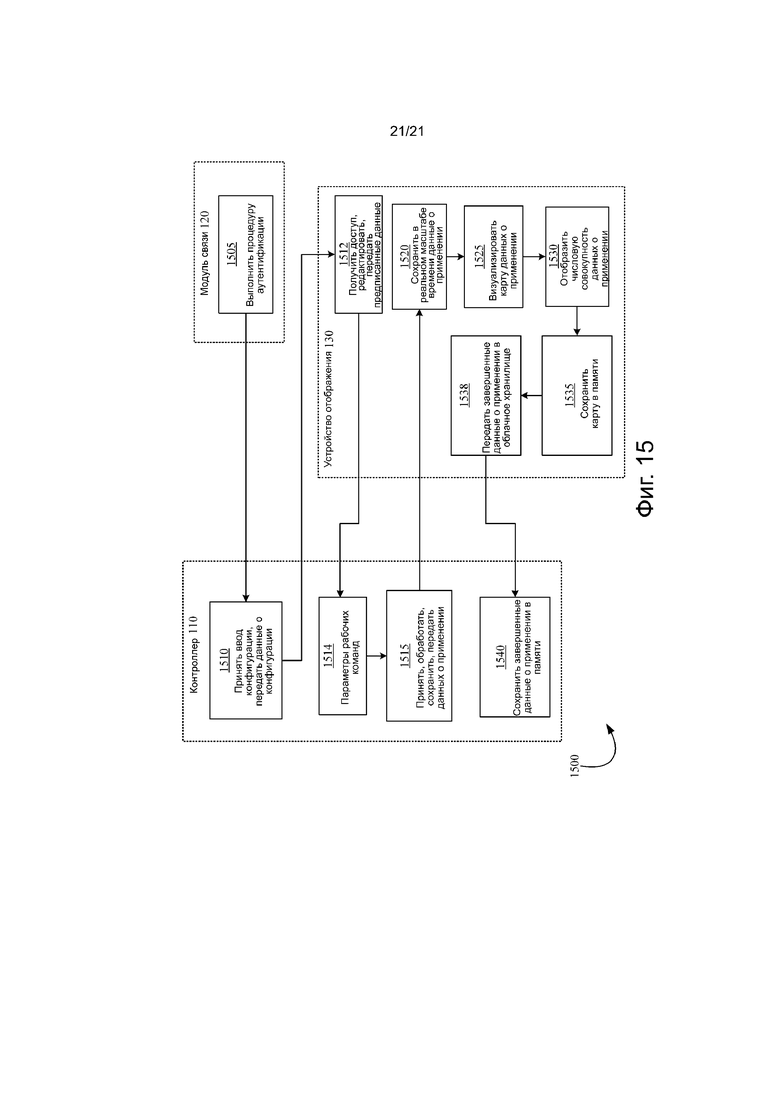
Изобретение относится к области измерительной техники и касается способа подсчета частиц, проходящих через канал. При осуществлении способа формируют световую плоскость поперек канала матрицей светодиодных излучателей. По мере прохождения частиц через световую плоскость регистрируют исходные значения выходного сигнала, генерируемого в каждом световом канале, и сохраняют значения выходного сигнала в ячейках данных. Нормируют исходные значения так, чтобы каждая ячейка имела значение нормированного выходного сигнала (NOS). Анализируют значения NOS для выявления ячеек данных, объединенных в виде кластера по меньшей мере одним значением NOS, причем каждый кластер определяет отдельное событие, соответствующее по меньшей мере одной частице. Для каждого выявленного события суммируют значения NOS, определяют групповую скорость и объем события. Определяют количество частиц каждого упомянутого выявленного события первой плоскости путем классификации объема события. Технический результат заключается в повышении точности подсчета частиц. 2 н. и 13 з.п. ф-лы, 21 ил.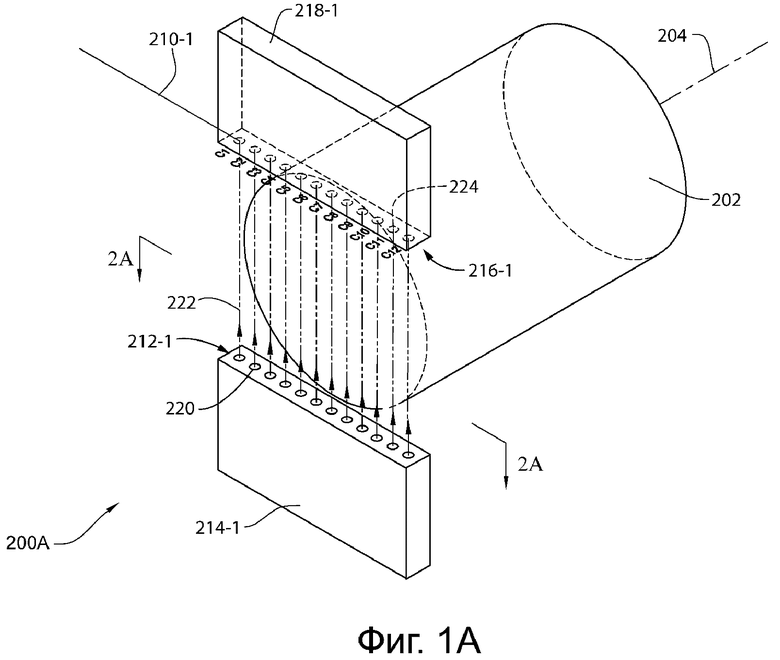
1. Способ подсчета частиц, проходящих через канал, причем способ содержит этапы, на которых:
(A) формируют первое количество световых каналов с определенным разносом относительно друг друга поперек канала перпендикулярно продольной оси канала, причем первое количество световых каналов совместно определяет первую световую плоскость, каждый канал из первого количества световых каналов формируется соответствующим одним светодиодным излучателем из первого количества светодиодных излучателей, расположенных на первой стороне канала, каждый светодиодный излучатель из первого количества светодиодных излучателей отстоит на известное расстояние от других излучателей и создает некоторую интенсивность света;
(B) генерируют исходные значения выходного сигнала, пропорциональные интенсивности света каждого светового канала из первого количества световых каналов, с помощью первого количества фотодиодов, расположенных на второй стороне канала, причем каждый фотодиод из первого количества фотодиодов расположен напротив одного из светодиодных излучателей из первого количества светодиодных излучателей;
(C) по мере прохождения частиц через первую световую плоскость параллельно регистрируют исходные значения выходного сигнала, генерируемого в каждом световом канале из первого количества световых каналов, в ходе последовательных сканирований данных, при этом исходные значения выходного сигнала сохраняются в ячейках данных в первом наборе данных;
(D) нормируют исходные значения выходного сигнала в каждой из ячеек данных первого набора данных так, чтобы каждая ячейка данных первого набора данных имела значение нормированного выходного сигнала (Normalized Output Signal, NOS);
(E) анализируют значения NOS каждой из ячеек данных первого набора данных для выявления ячеек данных, объединенных в виде кластера по меньшей мере одним значением NOS в пределах заданного диапазона значений NOS, причем каждый из выявленных кластеров объединенных ячеек данных первого набора данных определяет отдельное событие первой плоскости, соответствующее по меньшей мере одной частице, проходящей через первую световую плоскость;
(F) маркируют каждое упомянутое отдельное событие первой плоскости уникальным идентификатором первой плоскости;
(G) суммируют значения NOS каждого упомянутого выявленного события первой плоскости;
(H) определяют групповую скорость каждого упомянутого выявленного события первой плоскости;
(I) определяют для каждого упомянутого выявленного события первой плоскости объем события путем умножения суммы значений NOS каждого упомянутого выявленного события первой плоскости, полученной на этапе (G), на групповую скорость, определенную на этапе (H), для каждого упомянутого выявленного события первой плоскости;
(J) определяют количество частиц каждого упомянутого выявленного события первой плоскости путем классификации объема события.
2. Способ по п. 1, дополнительно содержащий этапы, на которых:
(K) формируют второе количество световых каналов на заданном расстоянии друг от друга поперек канала перпендикулярно продольной оси канала, причем второе количество световых каналов совместно определяет вторую световую плоскость, при этом каждый световой канал из второго количества световых каналов генерируется соответствующим светодиодным излучателем из второго количества светодиодных излучателей, расположенных на третьей стороне канала, ориентированной под углом 90 градусов к первой стороне канала, при этом каждый светодиодный излучатель из второго количества светодиодных излучателей расположен на известном расстоянии от других излучателей и создает некоторую интенсивность света, причем вторая световая плоскость смещена относительно первой световой плоскости вдоль продольной оси канала на известное расстояние;
(L) генерируют исходные значения выходного сигнала, пропорциональные интенсивности света в каждом световом канале из второго количества световых каналов, с помощью второго количества фотодиодов, расположенных на четвертой стороне канала, при этом каждый фотодиод из второго количества фотодиодов расположен напротив одного светодиодного излучателя из второго количества светодиодных излучателей;
(M) параллельно регистрируют исходные значения выходного сигнала, генерируемые в каждом световом канале из второго количества световых каналов при прохождении частиц через вторую световую плоскость, посредством последовательных сканирований данных, причем исходные значения выходного сигнала сохраняются в ячейках данных во втором наборе данных;
(N) нормируют исходные значения исходного выходного сигнала в каждой из ячеек данных второго набора данных так, чтобы каждая ячейка данных второго набора данных имела значение нормированного выходного сигнала (NOS);
(O) анализируют значения NOS каждой из ячеек данных второго набора данных для выявления ячеек данных, объединенных в виде кластера по меньшей мере одним значением NOS в пределах заданного диапазона значений NOS, причем каждый из выявленных кластеров объединенных ячеек данных второго набора данных определяет отдельное событие второй плоскости, соответствующее по меньшей мере одной частице, проходящей через вторую световую плоскость;
(P) маркируют каждое упомянутое отдельное событие второй плоскости уникальным идентификатором второй плоскости;
(Q) суммируют значения NOS каждого упомянутого выявленного события второй плоскости;
(R) определяют групповую скорость каждого упомянутого выявленного события второй плоскости;
(S) определяют для каждого упомянутого выявленного события второй плоскости объем события путем умножения суммы значений NOS каждого упомянутого выявленного события второй плоскости, определенной на этапе (Q), на групповую скорость каждого упомянутого выявленного события второй плоскости с этапа (R);
(T) определяют количество частиц каждого упомянутого выявленного события второй плоскости посредством классификации объема события для каждого выявленного события второй плоскости;
(U) ассоциируют каждое упомянутое выявленное событие первой плоскости с соответствующим событием из упомянутых выявленных событий второй плоскости;
(V) определяют, какое из упомянутых ассоциированных событий первой и второй плоскости имеет большее количество частиц;
(W) вычисляют текущее количество частиц за период работы путем добавления большего количества частиц, определенного на этапе (V), к количеству частиц непосредственно предшествующего события из упомянутых ассоциированных выявленных событий первой и второй плоскости.
3. Способ по п. 1, в котором на этапе (D) нормирования значений исходного выходного сигнала в каждой ячейке данных первого набора данных:
преобразуют исходные значения выходного сигнала в каждой ячейке данных первого набора данных в значение NOS между 0 и 1, при этом значение NOS, равное 0, соответствует максимальной интенсивности света в соответствующем световом канале из первого количества световых каналов и указывает на то, что световой канал не заблокирован какой-либо из частиц, проходящих через световой канал, а значение NOS, равное 1, соответствует минимальной интенсивности света в соответствующем световом канале из первого количества световых каналов и указывает, что световой канал полностью заблокирован частицами, проходящими через световой канал.
4. Способ по п. 2, в котором на этапе (N) нормирования значений исходного выходного сигнала в каждой ячейке данных второго набора данных:
преобразуют исходные значения выходного сигнала в каждой ячейке данных второго набора данных в значение NOS между 0 и 1, при этом значение NOS, равное 0, соответствует максимальной интенсивности света в соответствующем световом канале из второго количества световых каналов и указывает на то, что световой канал не заблокирован какой-либо из частиц, проходящих через световой канал, а значение NOS, равное 1, соответствует минимальной интенсивности света в соответствующем световом канале из второго количества световых каналов и указывает на то, что световой канал полностью заблокирован частицами, проходящими через световой канал.
5. Способ по п. 1, дополнительно содержащий этап, на котором:
вычисляют количество проходящих частиц в течение периода работы путем добавления количества частиц, определенного на этапе (J), к количеству частиц непосредственно предшествующего события из упомянутых выявленных событий первой плоскости.
6. Способ по п. 1, в котором на этапе определения групповой скорости упомянутого выявленного события первой плоскости:
определяют характерную ширину для заданного количества событий первой плоскости;
определяют характерную длительность для заданного количества событий первой плоскости;
делят характерную ширину на характерную длительность;
причем характерная ширина определяется путем нахождения наиболее распространенной ширины события для событий первой плоскости для заданного количества событий, при этом ширина каждого события из событий первой плоскости определяется путем подсчета первого количества каналов, имеющих значения NOS, определяющие каждое событие первой плоскости, и умножения упомянутого количества на известное расстояние между светодиодными излучателями; а
характерная длительность определяется путем нахождения наиболее распространенной длительности события для событий первой плоскости для заданного количества событий первой плоскости, причем каждая длительность события каждого события первой плоскости определяется путем определения длительности между первым значением NOS и последним значением NOS, определяющими каждое событие первой плоскости.
7. Способ по п. 2, в котором на этапе определения групповой скорости упомянутого выявленного события второй плоскости:
определяют разность во времени между упомянутым выявленным событием первой плоскости и упомянутым выявленным событием второй плоскости, ассоциированным с упомянутым событием первой плоскости, и делят разность во времени на известное расстояние смещения второй световой плоскости относительно первой световой плоскости.
8. Способ по п. 2, в котором известное расстояние смещения второй световой плоскости относительно первой световой плоскости составляет от 0,05 до 1 дюйма (от 0,13 до 2,5 см).
9. Способ по п. 1, в котором на этапе классификации каждого из выявленных на этапе (J) объемов событий первой плоскости для определения количества частиц в событии первой плоскости:
определяют, удовлетворяет ли выявленный объем события первой плоскости критериям для заданного количества частиц.
10. Способ по п. 2, в котором на этапе определения количества частиц на этапе (T) посредством классификации объема события:
определяют, удовлетворяет ли объем события выявленного события второй плоскости критериям для заданного количества частиц.
11. Способ по п. 9 или 10, в котором заданное количество частиц представляет собой одно из: (i) пяти частиц, (ii) четырех частиц, (iii) трех частиц, (iv) двух частиц и (v) одной частицы.
12. Способ по п. 1 или 2, дополнительно содержащий этапы, на которых:
анализируют значения NOS каждой из ячеек данных первого или второго набора данных для выявления впадин в объединенных кластерах ячеек данных NOS, определяющих упомянутые отдельные события первой или второй плоскости;
подразделяют каждое упомянутое выявленное событие первой или второй плоскости, имеющее впадины в объединенных кластерах ячеек данных NOS, на дополнительные отдельные события первой или второй плоскости.
13. Способ по п. 1 или 2, в котором канал представляет собой распределительную трубу пневматической сеялки или семяпровод сеялки точного высева, а частицы представляют собой одно из (i) семян; (ii) удобрения; или (iii) семян и удобрения.
14. Система подсчета частиц, содержащая:
первую матрицу излучателей, имеющую первое количество разнесенных светодиодных излучателей, причем каждый светодиодный излучатель из первого количества светодиодных излучателей создает канал света, имеющий некоторую интенсивность света, первая матрица излучателей расположена на первой стороне канала так, что первое множество световых каналов проходит поперек канала перпендикулярно продольной оси канала, при этом первое множество световых каналов определяет первую световую плоскость;
первую матрицу приемников, имеющую первое количество разнесенных фотодиодов, причем первая матрица приемников расположена на второй стороне канала, и каждый фотодиод из первого количества фотодиодов расположен напротив одного из светодиодных излучателей из первого количества светодиодных излучателей, каждый фотодиод из первого количества фотодиодов выполнен с возможностью генерирования исходных значений выходного сигнала, пропорциональных интенсивности света в каждом соответствующем световом канале из первого количества световых каналов;
контроллер, находящийся в сигнальной связи с первой матрицей приемников и выполненный с возможностью:
(i) приема исходных значений выходного сигнала от каждого фотодиода из первого количества фотодиодов в ходе серии последовательных сканирований данных и сохранения исходных значений выходного сигнала в ячейках данных первого набора данных;
(ii) нормирования значений исходного выходного сигнала в каждой из ячеек данных первого набора данных так, чтобы каждая ячейка данных первого набора данных имела значение нормированного выходного сигнала (NOS);
(iii) анализа значений NOS каждой из ячеек данных первого набора данных для выявления ячеек данных, объединенных в виде кластера по меньшей мере одним значением NOS в пределах заданного диапазона значений NOS, причем каждый из выявленных кластеров объединенных ячеек данных первого набора данных определяет отдельное событие первой плоскости, соответствующее по меньшей мере одной частице, проходящей через первую световую плоскость;
(iv) маркировки каждого упомянутого отдельного события первой плоскости уникальным идентификатором первой плоскости;
(v) определения для каждого упомянутого выявленного события первой плоскости объема события путем умножения суммы значений NOS каждого упомянутого выявленного события первой плоскости на групповую скорость каждого упомянутого выявленного события первой плоскости;
(vi) определения количества частиц каждого упомянутого выявленного события первой плоскости путем классификации объема события.
15. Система подсчета частиц по п. 14, дополнительно содержащая:
вторую матрицу излучателей, включающую в себя второе количество разнесенных светодиодных излучателей, причем каждый светодиодный излучатель из второго количества светодиодных излучателей создает канал света, имеющий некоторую интенсивность света, вторая матрица излучателей расположена на третьей стороне канала так, что второе множество световых каналов проходит поперек канала перпендикулярно продольной оси канала и под углом 90 градусов относительно первого количества световых каналов, причем второе количество световых каналов определяет вторую световую плоскость, при этом вторая световая плоскость смещена относительно первой световой плоскости вдоль продольной оси канала на известное расстояние;
вторую матрицу приемников, включающую в себя второе количество разнесенных фотодиодов, причем вторая матрица приемников расположена на четвертой стороне канала, и каждый фотодиод из второго количества фотодиодов расположен напротив одного светодиодного излучателя из второго количества светодиодных излучателей, причем каждый фотодиод из второго количества фотодиодов выполнен с возможностью генерирования исходных значений выходного сигнала, пропорциональных интенсивности света в каждом соответствующем световом канале второго количества световых каналов;
при этом каждый фотодиод из второго количества фотодиодов второй матрицы приемников находится в сигнальной связи с первой матрицей приемников;
при этом контроллер дополнительно выполнен с возможностью:
(i) приема исходных значений выходного сигнала от каждого фотодиода из второго количества фотодиодов в ходе серии последовательных сканирований данных и сохранения исходных значений выходного сигнала в ячейках данных второго набора данных;
(ii) нормирования исходных значений выходного сигнала в каждой из ячеек данных второго набора данных так, чтобы каждая ячейка данных второго набора данных имела значение NOS;
(iii) анализа значений NOS каждой из ячеек данных второго набора данных для выявления ячеек данных, объединенных в виде кластера по меньшей мере одним значением NOS в пределах заданного диапазона значений NOS, причем каждый из выявленных кластеров объединенных ячеек данных второго набора данных определяет отдельное событие второй плоскости, соответствующее по меньшей мере одной частице, проходящей через вторую световую плоскость;
(iv) маркировки каждого упомянутого отдельного события второй плоскости уникальным идентификатором второй плоскости;
(v) определения для каждого упомянутого выявленного события второй плоскости объема события путем умножения суммы значений NOS каждого упомянутого выявленного события второй плоскости на групповую скорость каждого упомянутого выявленного события второй плоскости;
(vi) определения количества частиц каждого упомянутого выявленного события второй плоскости посредством классификации объема события для каждого выявленного события второй плоскости;
(vii) ассоциирования каждого упомянутого выявленного события первой плоскости с соответствующим событием из упомянутых выявленных событий второй плоскости;
(viii) определения, какое из упомянутых ассоциированных событий первой и второй плоскости имеет большее количество частиц;
(ix) вычисления текущего количества частиц за период работы путем добавления большего количества частиц, определенного на этапе (viii), к количеству частиц непосредственно предшествующего события из упомянутых ассоциированных выявленных событий первой и второй плоскости.
| US 4675520 A1, 23.06.1987 | |||
| US 2011303137 A1, 15.12.2011 | |||
| US 2007242269 A1, 18.10.2007 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЛИЧЕСТВА МИКРОБИОЛОГИЧЕСКИХ ОБЪЕКТОВ В ПРОЦЕССЕ ИХ КУЛЬТИВИРОВАНИЯ | 2007 |
|
RU2401308C2 |
