ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение в общем относится к производственным и/или техническим процессам и управлению процессами, а конкретнее - к технической области производственного/технического моделирования и/или оптимизации параметров моделей/управления
УРОВЕНЬ ТЕХНИКИ
Управление производственным и/или техническим процессом обычно включает в себя получение от датчиков технических данных, связанных с производственной и/или технической системой, преобразование этих технических данных в некоторые технические знания (моделирование) и использование знаний для создания сигналов управления, которые обеспечивают эффективное управление производственным и/или техническим процессом.
В этих целях большинство отраслей используют какое-либо программное обеспечение для моделирования, помогающее им создавать модели представления знаний, которые могут взаимодействовать с их данными. Эти модели, как правило, кодируются на объектно-ориентированном языке моделирования отраслевой направленности. В некоторых случаях модели основаны на физических уравнениях, полученных из теории, в других случаях модели основаны на статистических методах, таких как регрессионный анализ, а еще в других случаях модель основана на так называемых алгоритмах генетической оптимизации, которые могут быть использованы для решения как ограниченных, так и неограниченных задач оптимизации на основе процесса естественного отбора, имитирующего биологическую эволюцию.
Для увеличения повторного использования знаний в таких моделях наблюдается тенденция к использованию акаузальных декларативных языков моделирования, таких как Modelica или Modia, где детали имитационного моделирования и порядки обработки четко отделены от физических моделей. Из-за повышенной сложности таких систем моделирования эти акаузальные декларативные языки моделирования обычно реализуются как фреймворки общего назначения или программное обеспечение, которые затем могут быть адаптированы к различным отраслям с помощью схем-решателей и/или библиотек моделей. Эти новые языки моделирования способны масштабировать усилия по моделированию за счет гораздо более эффективного повторного использования человеческого труда в процессе моделирования.
В то же время существует необходимость в моделировании систем с использованием методов искусственного интеллекта (ИИ), таких как нейронные сети и другие подобные универсальные аппроксиматоры функций, чтобы уменьшить потребность в дорогостоящих человеко-часах моделирования вручную и/или в системах моделирования с неизвестным поведением. Эти системы, в общем, представляют собой причинно-определенные «черные ящики», написанные в специальном программном обеспечении, которое способно использовать вычислительно-эффективные алгоритмы, такие как обратное распространение. Недостатком таких методов «черного ящика» является то, что они, как правило, имеют мало возможностей для повторного использования из-за отсутствия модульности, сложности интерпретации и принудительной причинно-следственной связи на всех этапах. Кроме того, стандартный автономный подход с градиентным спуском для обучения отдельного универсального аппроксиматора функций становится неэффективным, когда они интегрированы в другие системы, оптимизируемые одновременно, поскольку модификация других частей может смещать оптимумы для каждого компонента.
Производственная тенденция к цифровизации операций и возможность создания более сложных моделей с помощью улучшенных языков моделирования означает, что системы моделирования сталкиваются с новыми величинами данных, которые не могут быть решены с помощью современных вычислительных систем и методов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Общей целью является обеспечение эффективного расчета и/или адаптации технической модели (моделей) производственных и/или технических процессов и/или улучшенного управления производственными и/или техническими процессами.
В частности, может потребоваться обеспечение более точных и эффективных компьютеризированных способов для применения к моделям производственных процессов и их использование для создания улучшенного управления производственными процессами.
Конкретной целью является обеспечение более вычислительно-эффективного расчета градиентов ошибок на основе датчиков по акаузальным декларативным моделям, которые содержат универсальные аппроксиматоры функций.
Еще одной целью является выполнение эффективного автоматизированного сбора, повторного использования знаний и манипулирования знаниями, неявно закодированными в универсальных аппроксиматорах функций для использования при анализе и/или управлении производственными процессами.
Еще одной целью является адаптация и/или оптимизация систем моделирования, которые обеспечивают эффективное взаимодействие между человеческим пониманием процессов и универсальными моделями аппроксимации функций.
Еще одной целю является обеспечение вычислительно-эффективного использования данных от датчиков для обеспечения оптимальных параметризованных систем и/или политик управления посредством интерпретируемого человеком полуконтролируемого обучения с подкреплением.
Еще одной целью является обеспечение эффективной по данным и вычислительно-эффективной оптимизации управления производственными и/или техническими процессами, основанной на обучении с подкреплением, посредством использования полуконтролируемого обучения.
Еще одной целью является обеспечение эффективного управления производственными и/или техническими процессами.
Эти и другие цели достигаются благодаря вариантам осуществления, раскрытым в настоящем документе.
В определенном смысле, требуется обеспечение системы, которая интерпретирует акаузальные декларативные модели с универсальными аппроксиматорами функций и обеспечивает данные в один или два этапа для создания градиентов, точных параметров модели, параметризованного управления, оптимизированного производственного процесса и/или моделей производственных процессов вычислительно-эффективным образом.
Также может требоваться обеспечение способа создания градиентов, точных параметров модели, параметризованного управления, управляющих сигналов и/или оптимизированного производственного процесса с использованием обеспеченных параметризованных моделей на акаузальном декларативном языке моделирования.
Согласно первому аспекту, обеспечена система, содержащая:
- один или более процессоров;
память, обеспечивающую хранение: полностью или частично акаузальной модульной параметризованной модели производственного и/или технического процесса, содержащей по меньшей мере одну физическую подмодель и по меньшей мере одну нейронную сетевую подмодель, используемую в качестве универсального аппроксиматора функций для по меньшей мере частичного моделирования производственного и/или технического процесса, включая один или более параметров модели для полностью или частично акаузальной модульной параметризованной модели;
- симулятор, обеспечивающий, посредством одного или более процессоров, имитационное моделирование производственного и/или технического процесса на основе полностью или частично акаузальной модульной параметризованной модели (процесса) и соответствующей системы дифференциальных уравнений, и
- вычислитель (evaluator), обеспечивающий, посредством одного или более процессоров, применение автоматического дифференцирования в обратном режиме в отношении системы дифференциальных уравнений при имитационном моделировании производственного и/или технического процесса с целью генерирования расчетной оценки (англ. evaluation estimate), представляющей собой расчет (evaluation) модели производственного и/или технического процесса; и
- модуль адаптации, обеспечивающий, посредством одного или более процессоров (110), прием расчетной оценки для обновления по меньшей мере одного параметра модели полностью или частично акаузальной модульной параметризованной модели для производственного и/или технического процесса на основе процедуры градиентного спуска или подъема.
Например, вычислитель может обеспечивать генерирование расчетной оценки, по меньшей мере частично на основе технических данных от датчиков, таких как один или более параметров временных рядов, поступающих из одной или более систем сбора данных, которые осуществляли контроль производственного и/или технического процесса.
Например, система может дополнительно содержать, как часть симулятора:
- компилятор, обеспечивающий, посредством одного или более процессоров, прием параметризованной модели процесса и создание системы дифференциальных уравнений; и
- один или более решателей дифференциальных уравнений, обеспечивающих, посредством одного или более процессоров, прием системы дифференциальных уравнений и имитационное моделирование производственного и/или технического процесса во времени.
В этих примерах память также может обеспечивать хранение: полностью или частично акаузальной модульной параметризованной модели управления для моделирования процесса управления, выполняемого системой управления, управляющей, по меньшей мере, частью производственного и/или технического процесса, включая один или более параметров параметризованной модели управления. Затем можно определить полностью или частично акаузальную модульную параметризованную модель управления для взаимодействия с по меньшей мере частью полностью или частично акаузальной модульной параметризованной модели производственного и/или технического процесса, оптимизированного по обновленным параметрам модели. Процесс управления по меньшей мере частично моделируется одной или более нейронными сетями, используемыми в качестве универсального аппроксиматора (универсальных аппроксиматоров) функций. Система может дополнительно содержать:
- симулятор управления, обеспечивающий, посредством одного или более процессоров, имитационное моделирование процесса управления на основе полностью или частично акаузальной модульной параметризованной модели управления и соответствующей системы дифференциальных уравнений, и
- модуль цели управления, обеспечивающий, посредством одного или более процессоров, расчет цель управления, определяемой как функция цели управления для состояний модели управления в системе управления для управления производственным и/или техническим процессом;
- оцениватель управления при автоматическом дифференцировании в обратном режиме, обеспечивающий, посредством одного или более процессоров, оценку градиента цели управления по имитационному моделированию управления в отношении одного или более параметров управления с использованием автоматического дифференцирования в обратном режиме в отношении системы дифференциальных уравнений, имитационно моделирующих процесс управления; и
- оптимизатор управления, обеспечивающий, посредством одного или более процессоров, прием градиента из оценивателя управления при автоматическом дифференцировании в обратном режиме и один или более параметров управления, а также обновлять параметры управления на основе градиентного спуска или подъема и сохранять улучшенные параметры управления в памяти.
Согласно второму аспекту, обеспечена система, выполненная с возможностью расчета и/или адаптации одной или более технических моделей, относящихся к производственному и/или техническому процессу. Система выполнена с возможностью получения полностью или частично акаузальной модульной параметризованной модели (процесса) для производственного и/или технического процесса, включая один или более параметров модели полностью или частично акаузальной модульной параметризованной модели, причем полностью или частично акаузальная модульная параметризованная модель процесса определена таким образом, чтобы производственный и/или технический процесс по меньшей мере частично моделировался одной или более нейронными сетями, используемыми в качестве универсального аппроксиматора (универсальных аппроксиматоров) функций. Система также выполнена с возможностью имитационного моделирования производственного и/или технического процесса на основе полностью или частично акаузальной модульной параметризованной модели (процесса) и соответствующей системы дифференциальных уравнений. Система дополнительно выполнена с возможностью применения автоматического дифференцирования в обратном режиме в отношении системы дифференциальных уравнений и генерирования оценки, представляющей собой расчет модели процесса для производственного и/или технического процесса. Система также выполнена с возможностью обновления по меньшей мере одного параметра модели полностью или частично акаузальной модульной параметризованной модели производственного и/или технического процесса на основе сгенерированной расчетной оценки и на основе процедуры градиентного спуска или подъема, а также с возможностью сохранения новых параметров в памяти.
Например, система может быть выполнена с возможностью получения от датчиков технических данных, представляющих одно или более состояний производственного и/или технического процесса в один или более моментов времени, при этом система может быть выполнена с возможностью генерирования расчетной оценки, по меньшей мере частично основанной на технических данных от датчиков. Кроме того, система может быть выполнена с возможностью имитационного моделирования динамических характеристик состояния (состояний) производственного и/или технического процесса во времени, а также система может быть выполнена с возможностью генерирования оценки градиента, относящегося к одному или более имитационно-моделируемым состояниям в отношении по меньшей мере одной функции потерь, представляющей расхождение между i) основанным на модели имитационно-смоделированным производственным и/или техническим процессом и ii) реальным представлением производственного и/или технического процесса, по меньшей мере частично основанным на технических данных от датчиков.
В случаях, когда параметры модели были обновлены, система также обеспечивать получение полностью или частично акаузальной модульной параметризованной модели управления процесса управления, выполняемой системой управления, управляющей по меньшей мере частью производственного и/или технического процесса, включая один или более параметров полностью или частично акаузальной модульной параметризованной модели управления. Затем можно определить полностью или частично а каузальную модульную параметризованную модель управления для взаимодействия с по меньшей мере частью параметризованной модели производственного и/или технического процесса, оптимизированного с помощью обновленных параметров модели. Процесс управления по меньшей мере частично моделируется одной или более нейронными сетями, используемыми в качестве универсального аппроксиматора (универсальных аппроксиматоров) функций. Таким образом, система выполнена с возможностью имитационного моделирования процесса управления, выполняемого системой управления на основе полностью или частично акаузальной модульной параметризованной модели управления и соответствующей системы дифференциальных уравнений, применения автоматического дифференцирования в обратном режиме в отношении системы дифференциальных уравнений для генерирования расчетной оценки модели управления и обновления по меньшей мере одного параметра полностью или частично акаузальной модульной параметризованной модели управления на основе расчетной оценки модели управления.
Например, система может быть выполнена с возможностью передачи по меньшей мере части параметров модели управления в систему управления для использования в качестве основания для управления производственным и/или техническим процессом.
Согласно третьему аспекту, обеспечена система управления для технической и/или производственной системы, причем система управления включает в себя систему в соответствии со вторым аспектом или его подаспектами и/или взаимодействует с ней.
Согласно четвертому аспекту, обеспечена производственная и/или техническая система, содержащая систему в соответствии со вторым аспектом или его подаспектами и/или систему управления в соответствии с третьим аспектом.
Согласно пятому аспекту, обеспечен способ, выполняемый одним или более процессорами, для расчета и/или адаптации одной или более технических моделей, относящихся к производственному и/или техническому процессу. В основном способ включает в себя следующее:
- получают полностью или частично акаузальную модульную параметризованную модель производственного и/или технического процесса, содержащую по меньшей мере одну физическую подмодель и по меньшей мере одну нейронную сетевую подмодель, используемую в качестве универсального аппроксиматора функций для по меньшей мере частичного моделирования производственного и/или технического процесса, включая один или более параметров полностью или частично акаузальной модульной параметризованной модели;
- генерируют систему дифференциальных уравнений на основе полностью или частично акаузальной модульной параметризованной модели;
- имитационно моделируют динамические характеристики одного или более состояний производственного и/или технического процесса во времени на основе системы дифференциальных уравнений; и
- применяют автоматическое дифференцирование в обратном режиме в отношении системы дифференциальных уравнений при имитационном моделировании производственного и/или технического процесса для генерирования оценки, представляющей собой расчет модели производственного и/или технического процесса; и
- обновляют по меньшей мере один параметр модели в полностью или частично акаузальной модульной параметризованной модели производственного и/или технического процесса на основе расчетной оценки с использованием процедуры градиентного спуска или подъема.
Предпочтительно, оценка может быть сгенерирована, по меньшей мере частично, на основе технических данных от датчиков, поступающих из производственного и/или технического процесса.
Например, шаг применения автоматического дифференцирования в обратном режиме для генерирования оценки содержит шаг генерирования оценки градиента по функции потерь, которая основана на имитационно-моделируемых состояниях с использованием автоматического дифференцирования в обратном режиме.
Опционально, способ может дополнительно содержать следующее:
- принимают: полностью или частично акаузальную модульную параметризованную модель управления на основе по меньшей мере части модели производственного и/или технического процесса, оптимизированного с помощью обновленного (обновленных) параметра (параметров) модели и параметризованной системы управления производственным и/или техническим процессом; функцию цели управления для состояний модели управления, кодирующую цель управления для производственного и/или технического процесса, и параметры модели управления;
- генерируют состояния модели управления с использованием одного или более решателей дифференциальных уравнений;
- генерируют оценку градиента по функции цели управления в отношении параметров модели управления с использованием автоматического дифференцирования в обратном режиме;
- обновляют один или более параметров (модели управления) для модели управления с использованием градиентного спуска или подъема по оценке градиента.
Например, обновленные параметры для модели управления, также называемые параметрами модели управления, можно затем сохранить в памяти, или можно выполнить параметризованную систему управления в соответствии с обновленными параметрами для модели управления.
Например, обновленные параметры модели управления могут, таким образом, применяться для управления производственным и/или техническим процессом.
Согласно шестому аспекту, обеспечена компьютерная программа, содержащая:
- инструкции, которые при их выполнении по меньшей мере одним процессором побуждают по меньшей мере один процессор:
- получать полностью или частично акаузальную модульную параметризованную модель процесса для производственного и/или технического процесса, при этом полностью или частично акаузальная модульная параметризованная модель процесса определена таким образом, чтобы производственный и/или технический процесс по меньшей мере частично моделировался одной или более нейронными сетями, используемыми в качестве универсального аппроксиматора (универсальных аппроксиматоров) функций;
- имитационно моделировать производственный и/или технический процесс на основе полностью или частично акаузальной модульной параметризованной модели процесса и соответствующей системы дифференциальных уравнений;
- применять автоматическое дифференцирование в обратном режиме в отношении системы дифференциальных уравнений для генерирования оценки, представляющей собой расчет модели производственного и/или технического процесса; и
- обновлять по меньшей мере один параметр параметризованной модели процесса для производственного и/или технического процесса на основе сгенерированной расчетной оценки с использованием процедуры градиентного спуска или подъема.
Согласно седьмому аспекту, обеспечена компьютерная программа, содержащая инструкции, которые при их выполнении по меньшей мере одним процессором побуждают по меньшей мере один процессор:
- получать полностью или частично акаузальную модульную параметризованную модель управления для процесса управления, выполняемого системой управления, управляющей по меньшей мере частью производственного и/или технического процесса, включая один или более параметров полностью или частично акаузальной модульной параметризованной модели управления, при этом модель управления по меньшей мере частично моделируется одной или более нейронными сетями, используемыми в качестве универсального аппроксиматора (универсальных аппроксиматоров) функций;
- имитационно моделировать процесс управления, управляемый системой управления, на основе полностью или частично акаузальной модульной параметризованной модели управления и соответствующей системы дифференциальных уравнений;
- применять автоматическое дифференцирование в обратном режиме в отношении системы дифференциальных уравнений для генерирования расчетной оценки модели управления; и
- обновлять по меньшей мере один параметр параметризованной модели управления на основе расчетной оценки модели управления с использованием процедуры градиентного спуска или подъема.
Согласно восьмому аспекту, обеспечен компьютерный программный продукт, содержащий долговременный компьютерно-читаемый носитель с сохраненной на нем компьютерной программой в соответствии с шестым или седьмым аспектом.
Таким образом, можно обеспечить эффективный расчет и/или адаптацию технической модели (технических моделей) производственных и/или технических процессов.
За счет правильного расчета моделей процессов можно адаптировать модели, а в сочетании с соответствующими моделями управления также можно рассчитывать и оптимизировать параметризованные системы управления.
Также можно обеспечить более эффективные вычислительные процедуры для применения к моделям производственных и/или технических процессов и использовать их для создания улучшенного управления производственными и/или техническими процессами.
Также можно обеспечить возможность эффективного автоматического моделирования компонентов производственных и/или технических процессов в общей физической модели путем стандартной инициализации и последующей адаптации универсальных аппроксиматоров функций. Такая оптимизация совместной модели становится более эффективной за счет унифицированной адаптации, которая позволяет избежать взаимовлияния между отдельными адаптационными процессами, адаптируемыми индивидуально.
Кроме того, может стать возможным выполнение более эффективного полуконтролируемого обучения с подкреплением и достижение высокой эффективности данных посредством повторного использования данных за счет гибкости модели, снижения потребности в маркировке данных за счет неконтролируемого процесса обучения, а также более высокой вычислительной эффективности, чем дают методы обучения с исследовательским подкреплением, за счет повторного использования логики модели с автоматическим дифференцированием.
Изобретение в целом применимо к любому виду производственных и технических процессов, примеры которых будут приведены в подробном раскрытии изобретения.
Другие преимущества, предлагаемые изобретением, можно оценить при чтении приведенного ниже раскрытия вариантов осуществления изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение вместе с другими его целями и преимуществами лучше всего можно понять, рассмотрев нижеследующее описание вместе с сопроводительными чертежами, на которых:
На фиг. 1 представлена схема, иллюстрирующая пример производственной и/или технической системы и соответствующую модель согласно иллюстративному варианту осуществления.
На фиг. 2 представлен схематический системный обзор примера системы для расчета модели, относящейся к производственному и/или техническому процессу согласно одному из вариантов осуществления.
На фиг. 3 представлен схематический системный обзор примера системы для расчета и/или адаптации модели, относящейся к производственному и/или техническому процессу согласно одному из вариантов осуществления.
На фиг. 4 представлен схематический системный обзор другого примера системы для расчета и/или адаптации модели, относящейся к производственному и/или техническому процессу, и соответствующей системы управления согласно одному из вариантов осуществления, который представлен здесь с интегрированной реализацией модели производственного и/или технического процесса и соответствующей модели управления.
На фиг. 5 представлен схематический системный обзор еще одного примера системы для расчета и/или адаптации модели, относящейся к производственному и/или техническому процессу, и соответствующей системы управления согласно одному из вариантов осуществления, который представлен здесь с параллельной реализацией модели производственного и/или технического процесса и соответствующей модели управления.
На фиг. 6 представлен схематический системный обзор конкретного примера системы для расчета модели, относящейся к производственному и/или техническому процессу согласно одному из вариантов осуществления.
На фиг. 7 представлен схематический системный обзор конкретного примера системы для расчета и/или адаптации модели, относящейся к производственному и/или техническому процессу согласно одному из вариантов осуществления.
На фиг. 8 представлена блок-схема, иллюстрирующую пример способа расчета и/или адаптации одной или более технических моделей, относящихся к производственному и/или техническому процессу согласно одному из вариантов осуществления.
На фиг. 9 представлена схема, иллюстрирующая другой конкретный пример системы, реализуемой на основе процессора и памяти, для расчета и/или адаптации модели, связанной с производственным и/или техническим процессом.
На фиг. 10 представлена схема, иллюстрирующая другой конкретный пример системы, реализуемой на основе процессора и памяти, для оценки и/или адаптации модели, связанной с моделью управления/системой производственного и/или технического процесса.
На фиг. 11 представлена схема, иллюстрирующую пример компьютерной реализации согласно одному из вариантов осуществления.
ПОДРОБНОЕ РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
На всех чертежах для аналогичных или соответствующих элементов используются одни и те же номера позиций.
Для лучшего понимания предлагаемой технологии может быть полезно начать с краткого обзора системы и введения в некоторые примеры вариантов осуществления, за которыми следует более подробное описание конкретных примеров реализаций, а также объяснения некоторых полезных технических терминов.
Начнем с фиг. 1, где представлена схема, иллюстрирующая пример производственной и/или технической системы, и соответствующую модель согласно иллюстративному варианту осуществления. Физическая реальная система, такая как производственная и/или техническая система 10, может быть выполнена с возможностью осуществления производственного и/или технического процесса с использованием одной или более физических подсистем. Для моделирования производственного и/или технического процесса, определяемого контролируемой или иногда неконтролируемой работой и поведением производственной и/или технической систем, может быть построена и определена соответствующая параметризованная модель, включающая в себя один или более параметров модели.
В данном конкретном описании параметризованная модель производственного и/или технического процесса содержит по меньшей мере одну физическую подмодель или подсистему и по меньшей мере одну искусственную нейронную сетевую (ИНС) подмодель или подсистему. Предпочтительно, параметризованная модель представляет собой полностью или частично акаузальную модульную и параметризованную модель для производственного и/или технического процесса, т.е. акаузальную модульную и параметризованную модель процесса. Нейронную сетевую подмодель можно использовать в качестве универсального аппроксиматора функций для по меньшей мере частичного моделирования производственного и/или технического процесса.
«Полностью или частично акаузальная модульная параметризованная модель» - это понятие, которое применяется к акаузальному моделированию производственного и/или технического процесса, которое, в свою очередь, может дополнительно или альтернативно включать в себя моделирование процесса управления для управления производственным и/или техническим процессом, имея в виду, что такой процесс управления сам по себе является техническим процессом.
При моделировании производственного и/или технического процесса модель иногда может называться моделью процесса. При моделировании процесса управления для управления производственным и/или техническим процессом модель иногда может называться моделью управления. В некоторых вариантах осуществления могут существовать и взаимодействовать друг с другом как модель процесса, так и модель управления.
Параметры для модели обычно называются параметрами модели, когда речь идет об общем производственном и/или техническом процессе, и параметрами управления или иногда параметрами модели управления при обращении к модели управления для моделирования процесса управления.
Как будет проиллюстрировано в качестве примера с рассмотрением схем на фиг. 2 - фиг. 7, а также реализации с процессором и памятью на фиг. 11, следует принять во внимание, что некоторые ключевые признаки предлагаемой технологии включают в себя получение параметризованной модели производственного и/или технического процесса, как указано выше, имитационное моделирование производственного и/или технического процесса на основе параметризованной модели и соответствующей системы дифференциальных уравнений, а также применение автоматического дифференцирования в обратном режиме в отношении системы дифференциальных уравнений и генерирование оценки, представляющей собой расчет модели процесса для производственного и/или технического процесса.
Предлагаемая технология для реализации может, например, использовать технологию компилятора и решатели дифференциальных уравнений.
Способы и процедуры, а также соответствующие системы могут быть расширены для обновления параметров модели на основе расчетной оценки, а также могут включать одну или более моделей управления для соответствующих параметризованных систем управления и адаптировать или оптимизировать модель (модели) управления для генерирования обновленных параметров управления, тем самым улучшая управление и/или работу всего производственного и/или технического процесса.
На фиг. 2 представлен схематический обзор примера системы для расчета модели, относящейся к производственному и/или техническому процессу согласно одному из вариантов осуществления. Сверху на фиг. 2 представлена производственная и/или техническая системы 10 для осуществления производственного и/или технического процесса, а снизу - соответствующая система 20 для расчета модели.
Например, производственная и/или техническая система 10 может представлять собой любую систему в таких отраслях, как промышленное производство, переработка и упаковка, автомобилестроение и транспорт, горнодобывающая промышленность, целлюлозно-бумажная промышленность, инфраструктура, энергетика и электроснабжение, телекоммуникации, информационные технологии, аудио/видео, науки о жизни, нефтяная отрасль, газовая отрасль, водоочистка, санитарная обработка и/или аэрокосмическая отрасль.
Производственная и/или техническая система 10 включает в себя одну или более физических подсистем, таких как производственные линии или их участки, промышленные роботы, клапаны, насосы, генераторы, электрические сети, транспортные средства, двигатели, оборудование электростанций, электронные компоненты, компьютерные системы, аудио- и/или видеомодули, базовые станции, маршрутизаторы, серверы, охлаждающее и/или отопительное оборудование и т.д.
На основе знаний о производственной и/или технической системе, ее функциональности и эксплуатационных пределах может быть определена и/или получена модель соответствующего производственного и/или технического процесса. В нашем случае производственный и/или технический процесс по меньшей мере частично моделируется искусственной нейронной сетевой (ИНС) подмоделью или подсистемой, как упоминалось выше при рассмотрении фиг. 1.
Соответственно, параметризованная модель производственного и/или технического процесса содержит по меньшей мере одну физическую подмодель и по меньшей мере одну нейронную сетевую подмодель, как будет объяснено более подробно далее.
Затем производственный и/или технический процесс имитационно моделируют посредством симулятора на основе сгенерированной параметризованной модели. Например, компилятор и/или интерпретатор может обрабатывать информацию о модели для генерирования системы дифференциальных уравнений, и тогда имитационное моделирование может быть основано на этой системе дифференциальных уравнений, обрабатываемой одним или более решателями дифференциальных уравнений.
Выбранные результаты имитационного моделирования производственного и/или технического процесса затем могут быть «сопоставлены» с соответствующими техническими данными от датчиков, поступающими из производственной и/или технической системы 10, в вычислителе модели на основе автоматического дифференцирования в обратном режиме, для генерирования оценки, представляющей собой расчет модели производственного и/или технического процесса.
На фиг. 3 представлен схематический обзор примера системы для расчета и/или адаптации модели, относящейся к производственному и/или техническому процессу согласно одному из вариантов осуществления.
В данном конкретном примере предусмотрена система 20; 30 для расчета и/или адаптации модели. В этом контексте система дополнительно содержит адаптер модели, обеспечивающий возможность получения расчетной оценки для обновления по меньшей мере одного параметра модели для параметризованной модели производственного и/или технического процесса.
Например, опционально это может быть выполнено в итеративном процессе (см. пунктирный круговой указатель на фиг. 3) с обратной связью от адаптера модели обратно к симулятору до тех пор, пока не будет выполнено требуемое условие, после чего параметр (параметры) модели окончательно обновляются.
Например, адаптер модели может быть реализован как оптимизатор на основе градиента, как будет показано далее.
На фиг. 4 представлен схематический обзор другого примера системы для расчета и/или адаптации модели, относящейся к производственному и/или техническому процессу, и соответствующей системы управления согласно одному из вариантов осуществления, представленному здесь с интегрированной реализацией модели производственного и/или технического процесса и соответствующей модели управления.
Производственная и/или техническая система 10 здесь связана с системой 15 управления, выполненной с возможностью управления по меньшей мере частью производственной и/или технической системы 10.
В данном примере модель производственного и/или технического процесса объединена или интегрирована с моделью управления, соответствующей параметризованному варианту системы 15 управления. Затем общая интегрированная модель используется в качестве основания для имитационного моделирования производственного и/или технического процесса, включая работу системы 15 управления в производственной и/или технической системе 10, при этом интегрированная модель оценивается и адаптируется таким же образом, как раскрыто ранее. Таким образом, можно оценить и/или адаптировать интегрированную модель, обеспечивающую возможность обновления одного или более параметров как параметризованной модели процесса, так и параметризованной модели управления, что позволяет улучшить управление производственным и/или техническим процессом.
На фиг.5 представлен схематический системный обзор еще одного примера системы для расчета и/или адаптации модели, относящейся к производственному и/или техническому процессу, и соответствующей системы управления согласно варианту осуществления, проиллюстрированного здесь на примере параллельной реализации модели производственного и/или технического процесса и соответствующей модели управления.
В этом конкретном примере создана параллельная ветвь для расчета и/или адаптации модели управления. Первая ветвь для расчета и/или адаптации модели предназначена для модели процесса, а вторая параллельная ветвь предназначена для модели управления. Информация об обновленной модели процесса может быть передана для построения и/или адаптации модели управления. Например, вычислитель модели управления может работать на основе цели управления с использованием оценивателя автоматического дифференцирования в обратном режиме, а адаптер модели может быть оптимизатором управления, использующим процедуру на основе градиента.
Обновленная модель управления может в конечном итоге влиять на работу реальной системы 15 управления, тем самым влияя на производственную и/или техническую систему 10 и процесс, выполняемый производственной и/или технической системой. Таким образом, достигается улучшенное управление процессом.
На фиг. 6 представлен схематический системный обзор конкретного примера системы для расчета модели, относящейся к производственному и/или техническому процессу согласно одному из вариантов осуществления. Этот пример соответствует более общему примеру по фиг. 2, но здесь приведен пример с интерпретатором модели, таким как компилятор для получения параметризованной модели и генерирования соответствующей системы дифференциальных уравнений, и одним или более решателем дифференциальных уравнений для получения системы дифференциальных уравнений и имитационного моделирования производственного и/или технического процесса.
На фиг. 7 представлен схематический системный обзор конкретного примера системы для расчета и/или адаптации модели, относящейся к производственному и/или техническому процессу согласно одному из вариантов осуществления. Этот пример соответствует более общему примеру по фиг. 3, но здесь приведен пример с интерпретатором модели, таким как компилятор для получения параметризованной модели и генерирования соответствующей системы дифференциальных уравнений, и одним или более решателей дифференциальных уравнений для получения системы дифференциальных уравнений и имитационного моделирования производственного и/или технического процесса. Кроме того, адаптер модели здесь иллюстрируется оптимизатором на основе градиента, который может работать на основе процедуры с градиентом спуска или подъема.
Согласно первому аспекту, предлагаемая технология обеспечивает систему 20; 30; 100, содержащую:
- один или более процессоров 110;
- память 120, выполненную с возможностью хранения: полностью или частично акаузальной модульной параметризованной модели производственного и/или технического процесса, содержащей по меньшей мере одну физическую подмодель и по меньшей мере одну нейронную сетевую подмодель, используемую в качестве универсального аппроксиматора функций для по меньшей мере частичного моделирования производственного и/или технического процесса, включая один или более параметров модели для полностью или частично акаузальной модульной параметризованной;
- симулятор, обеспечивающий, посредством одного или более процессоров 110, имитационное моделирование производственного и/или технического процесса на основе полностью или частично акаузальной модульной параметризованной модели (процесса) и соответствующей системы дифференциальных уравнений, и
- вычислитель, обеспечивающий, посредством одного или более процессоров 110, применение автоматического дифференцирования в обратном режиме в отношении системы дифференциальных уравнений при имитационном моделировании производственного и/или технического процесса с целью генерирования расчетной оценки, представляющей собой расчет модели производственного и/или технического процесса; и
- модуль адаптации, обеспечивающий, посредством одного или более процессоров 110, прием расчетной оценки для обновления по меньшей мере одного параметра модели полностью или частично акаузальной модульной параметризованной модели производственного и/или технического процесса, основанной на процедуре градиентного спуска или подъема.
В качестве примера можно рассматривать фиг. 11, а также любую из фиг. 2 - фиг. 10.
Например, память 120 может обеспечивать хранение: технических данных от датчиков, таких как один или более параметров временных рядов, поступающих из одной или более систем сбора данных, которые осуществляли контроль производственного и/или технического процесса, а вычислитель может обеспечивать генерирование расчетной оценки, по меньшей мере частично основанной на технических данных от датчиков.
В одном из конкретных примеров система 20; 30; 100 дополнительно содержит, как часть симулятора:
- компилятор, обеспечивающий возможность, посредством одного или более процессоров 110, получать параметризованную модель процесса и создавать систему дифференциальных уравнений; и
- один или более решателей дифференциальных уравнений, выполненных с возможностью, посредством одного или более процессоров 110, получать систему дифференциальных уравнений и имитационно моделировать производственный и/или технический процесс во времени.
Например, решатель (решатели) дифференциальных уравнений могут обеспечивать, посредством одного или более процессоров 110, имитационное моделирование динамических характеристик состояния (состояний) производственного и/или технического процесса во времени, а вычислитель может обеспечивать, посредством одного или более процессоров 110, генерирование оценки градиента, относящегося к одному или более состояниям, полученным от решателя (решателей) дифференциальных уравнений в отношении по меньшей мере одной функции потерь для выдачи модулю адаптации модели.
Таким образом, модуль адаптации (адаптер модели) имеет возможность обновлять по меньшей мере один параметр модели для параметризованной модели производственного и/или технического процесса.
Например, по меньшей мере одна функция потерь может представлять ошибку моделирования при имитационном моделировании производственного и/или технического процесса.
Более конкретно, по меньшей мере одна функция потерь может, например, представлять ошибку между i) основанным на модели имитационно-моделируемым производственным и/или техническим процессом и ii) реальным представлением производственного и/или технического процесса, по меньшей мере частично основанным на технических данных от датчиков из одной или более систем сбора данных.
Например, модуль адаптации может включать в себя оптимизатор, обеспечивающий, посредством одного или более процессоров 110: прием одного или более параметров модели из памяти; прием расчетной оценки из вычислителя и обновление одного или более параметров модели на основе процедуры градиентного спуска или подъема, а также сохранение обновленных параметров в памяти.
Например, оптимизатор может обеспечивать, посредством одного или более процессоров 110, прием оценки градиента из вычислителя и обновление одного или более параметров модели с использованием градиентного спуска по функции потерь, которая кодирует ошибку имитационного моделирования при моделировании производственного и/или технического процесса.
В таких примерах память 120 также может быть выполнена с возможностью хранения: полностью или частично акаузальной модульной параметризованной модели управления для моделирования процесса управления, осуществляемого системой 15 управления, управляющей по меньшей мере частью производственного и/или технического процесса, включая один или более параметров параметризованной модели управления. Полностью или частично акаузальная модульная параметризованная модель управления может быть определена для взаимодействия с по меньшей мере частью полностью или частично акаузальной модульной параметризованной модели процесса для производственного и/или технического процесса, оптимизированного с помощью обновленных параметров модели. Процесс управления по меньшей мере частично моделируется одной или более нейронными сетями, используемыми в качестве универсального аппроксиматора (универсальных аппроксиматоров) функций. Система может дополнительно содержать:
- симулятор управления, обеспечивающий, посредством одного или более процессоров 110, имитационное моделирование процесса управления на основе полностью или частично акаузальной модульной параметризованной модели управления и соответствующей системы дифференциальных уравнений, и
- модуль цели управления, обеспечивающий, посредством одного или более процессоров 110, расчет цели управления, определяемой как функция цели управления для состояний модели управления системы управления для управления производственным и/или техническим процессом;
- оцениватель управления при автоматическом дифференцировании в обратном режиме, обеспечивающий, посредством одного или более процессоров 110, оценку градиента цели управления по имитационному моделированию управления в отношении одного или более параметров управления с использованием автоматического дифференцирования в обратном режиме в отношении системы дифференциальных уравнений, имитационно моделирующих процесс управления; и
- оптимизатор управления, обеспечивающий, посредством одного или более процессоров 110, прием градиента от оценивателя управления при автоматическом дифференцировании в обратном режиме и одного или более параметров управления, а также обновление параметров управления на основе градиентного спуска или подъема и сохранение улучшенных параметров управления в памяти 120.
Эти модули и/или компоненты могут быть интегрированы в симуляторе, вычислителе и/или адаптере для модели процесса или реализованы параллельно с ними, например, как показано на фиг. 4 и фиг. 5, соответственно.
Например, система может дополнительно содержать систему 15 управления, которая использует параметры управления для управления производственным и/или техническим процессом.
Например, общая система может дополнительно содержать производственную и/или техническую систему 10 для осуществления производственного и/или технического процесса, управляемого системой 15 управления.
Согласно второму аспекту, обеспечена система 20; 30; 100, выполненная с возможностью расчета и/или адаптации одной или более технических моделей, относящихся к производственному и/или техническому процессу. Система выполнена с возможностью получения полностью или частично акаузальной модульной параметризованной модели (процесса) для производственного и/или технического процесса, включая один или более параметров модели в полностью или частично акаузальной модульной параметризованной модели, причем полностью или частично акаузальная модульная параметризованная модель процесса определена таким образом, чтобы производственный и/или технический процесс по меньшей мере частично моделировался одной или более нейронными сетями, используемыми в качестве универсального аппроксиматора (универсальных аппроксиматоров) функций. Система 20; 30; 100 также выполнена с возможностью имитационного моделирования производственного и/или технического процесса на основе полностью или частично акаузальной модульной параметризованной модели (процесса) и соответствующей системы дифференциальных уравнений. Кроме того, система 20; 30; 100 выполнена с возможностью применения автоматического дифференцирования в обратном режиме в отношении системы дифференциальных уравнений и генерирования оценки, представляющей собой расчет модели процесса для производственного и/или технического процесса.
Система 20; 30; 100 дополнительно выполнена с возможностью обновления по меньшей мере одного параметра модели в полностью или частично акаузальной модульной параметризованной модели для производственного и/или технического процесса на основе сгенерированной расчетной оценки и на основе процедуры градиентного спуска или подъема, а также с возможностью сохранения новых параметров в памяти.
Например, система 20; 30; 100 может быть выполнена с возможностью получения от датчиков технических данных, представляющих одно или более состояний производственного и/или технического процесса в один или более моментов времени, при этом система 20; 30; 100 может быть выполнена с возможностью генерирования расчетной оценки, по меньшей мере частично основанной на технических данных от датчиков. Кроме того, система 20; 30; 100 может быть выполнена с возможностью имитационного моделирования динамических характеристик состояния (состояний) производственного и/или технического процесса во времени, а также система 20; 30; 100 может быть выполнена с возможностью генерирования оценки градиента, относящегося к одному или более имитационно-моделируемым состояниям в отношении по меньшей мере одной функции потерь, представляющей расхождение между i) основанным на модели имитационно-смоделированным производственным и/или техническим процессом и ii) реальным представлением производственного и/или технического процесса, по меньшей мере частично основанным на технических данных от датчиков.
Опционально, система 20; 30; 100 также может быть выполнена с возможностью получения полностью или частично акаузальной модульной параметризованной модели управления процесса управления, выполняемой системой 15 управления, управляющей по меньшей мере частью производственного и/или технического процесса, включая один или более параметров полностью или частично акаузальной модульной параметризованной модели управления. Определяют полностью или частично акаузальную модульную параметризованную модель управления для взаимодействия с по меньшей мере частью параметризованной модели производственного и/или технического процесса, оптимизированного с помощью обновленных параметров модели. Процесс управления по меньшей мере частично моделируется одной или более нейронными сетями, используемыми в качестве универсального аппроксиматора (универсальных аппроксиматоров) функций. Таким образом, система 20; 30; 100 будет выполнена с возможностью имитационного моделирования процесса управления, осуществляемого системой управления на основе полностью или частично акаузальной модульной параметризованной модели управления и соответствующей системы дифференциальных уравнений. Тогда система 20; 30; 100 может быть выполнена с возможностью применения автоматического дифференцирования в обратном режиме в отношении системы дифференциальных уравнений для генерирования расчетной оценки модели управления, а также система 20; 30; 100 может быть выполнена с возможностью обновления по меньшей мере одного параметра полностью или частично акаузальной модульной параметризованной модели управления на основе расчетной оценки модели управления.
Предпочтительно, система 20; 30; 100 может быть выполнена с возможностью передачи по меньшей мере части параметров модели управления в систему 15 управления для использования в качестве основания для управления производственным и/или техническим процессом.
В конкретных примерах система 20; 30; 100 содержит схему обработки, такую как один или более процессоров 110 и память 120, причем память 120 содержит инструкции, которые, при выполнении схемой 110 обработки, побуждают схему 110 обработки выполнять расчет и/или адаптацию одной или более технических моделей, относящихся к производственному и/или техническому процессу.
Согласно третьему аспекту, предусмотрена система 15 управления для технической и/или производственной системы 10, причем система 15 управления включает в себя систему 20; 30; 100 в соответствии с вышеупомянутым вторым аспектом или его подаспектами и/или взаимодействует с ней.
В соответствии с четвертым аспектом обеспечена производственная и/или техническая система 10, содержащая систему 20; 30; 100 в соответствии с вышеуказанным вторым аспектом или его подаспектами и/или систему управления 15 в соответствии с третьим аспектом.
На фиг. 8 представлена блок-схема, иллюстрирующая пример способа, выполняемого одним или более процессорами, для расчета и/или адаптации одной или более технических моделей, относящихся к производственному и/или техническому процессу согласно одному из вариантов осуществления.
В общем способ содержит следующее:
S1: получают полностью или частично акаузальную модульную параметризованную модель производственного и/или технического процесса, содержащую по меньшей мере одну физическую подмодель и по меньшей мере одну нейронную сетевую подмодель, используемую в качестве универсального аппроксиматора функций для по меньшей мере частичного моделирования производственного и/или технического процесса, включая один или более параметров полностью или частично акаузальной модульной параметризованной модели;
S2: генерируют систему дифференциальных уравнений на основе полностью или частично акаузальной модульной параметризованной модели;
S3: имитационно моделируют динамические характеристики одного или более состояний производственного и/или технического процесса во времени на основе системы дифференциальных уравнений; и
S4: применяют автоматическое дифференцирование в обратном режиме в отношении системы дифференциальных уравнений при имитационном моделировании производственного и/или технического процесса для генерирования оценки, представляющей собой расчет модели производственного и/или технического процесса;
S5: обновляют по меньшей мере один параметр модели в полностью или частично акаузальной модульной параметризованной модели для производственного и/или технического процесса на основе расчетной оценки с использованием процедуры градиентного спуска или подъема.
Предпочтительно, оценка может быть сгенерирована по меньшей мере частично на основе технических данных от датчиков, поступающих из производственного и/или технического процесса.
Например, шаг применения автоматического дифференцирования в обратном режиме для генерирования оценки содержит шаг генерирования оценки градиента по функции потерь, которая основана на имитационно-моделируемых состояниях с применением автоматического дифференцирования в обратном режиме.
Опционально, способ может дополнительно содержать следующее:
- принимают: полностью или частично акаузальную модульную параметризованную модель управления на основе по меньшей мере части модели для производственного и/или технического процесса, оптимизированного с помощью обновленного параметра (обновленных параметров) модели, и параметризованной системы управления для производственного и/или технического процесса; функцию цели управления для состояний модели управления, кодирующую цель управления для производственного и/или технического процесса; и параметры модели управления;
- генерируют состояния модели управления с использованием одного или более решателей дифференциальных уравнений;
- генерируют оценку градиента по функции цели управления в отношении параметров модели управления с применением автоматического дифференцирования в обратном режиме;
- обновляют один или более параметров модели управления с использованием градиентного спуска или подъема по оценке градиента.
Например, обновленные параметры для модели управления, также называемые параметрами модели управления, можно затем сохранить в памяти, или можно выполнить параметризованную систему управления в соответствии с обновленными параметрами для модели управления.
Например, обновленные таким образом параметры модели управления можно применять для управления производственным и/или техническим процессом.
Для лучшего понимания предлагаемая технология вместе с некоторыми полезными техническими терминами теперь будет раскрыта с рассмотрением различных неограничивающих примеров:
Декларативная акаузальная модель - это модель, которая описывает производственный процесс с помощью различных уравнений, и которая не указывает в каждом случае, какая переменная является входной, а какая - выходной. Это означает, что по меньшей мере некоторые уравнения в модели могут быть обратимыми, например, что одна и та же модель эффективности насоса может быть использована как для вычисления потребления энергии по расходу воды, так и для расчета расхода воды по потреблению энергии.
Некоторые переменные в модели также могут быть инициированы на основе данных от датчиков или других данных на стадии решателя, например, с использованием измеренной входной мощности насоса для имитационного моделирования его характера расхода с учетом этого входного сигнала. Такие данные также могут вводиться непосредственно в модель на стадии компилятора, а затем рассматриваться как часть модели. Также можно скомпилировать модели и вводить их на стадии решателя и/или скомпилировать решатель в компьютерно-читаемый формат и выдать параметры в результирующую программу.
Разделение моделирования между моделью и решателем для расчета временных динамических характеристик и/или начальных значений позволяет повторно использовать компоненты, записанные в этих типах моделей, в гораздо большей степени, чем традиционные объектно-ориентированные модели, за счет программной и/или аппаратной сложности.
Модель может иметь некоторую составляющую (некоторые составляющие), основанную/основанные на физическом моделировании. Например, такой составляющей могут быть простые уравнения давления для оценки температуры на основе изменения объема в пространстве и с учетом соединений с трубами, которые определены в другом месте. В другом примере это может быть ускорение турбины за счет приложения механической энергии. Эти уравнения, как правило, понятны эксперту-человеку, что предоставляет широкие возможности для интерпретации и анализа. Многие явления не имеют известного простого описания, что может сделать этот тип модели непригодным в таких случаях.
Модель может иметь некоторую составляющую (некоторые составляющие), выполненную/выполненные как одна или более нейронных сетей, например, используемых в качестве универсального аппроксиматора (универсальных аппроксиматоров) функций. Они реализованы в виде одного или более уравнений на языке акаузального моделирования и/или описаны на другом алгоритмическом языке и/или обеспечены в компьютерно-читаемом двоичном формате и/или подключены к внешнему программному обеспечению через интерфейс. Составляющие в виде нейронных сетей обычно считаются неинтерпретируемыми моделями - «черными ящиками», которые часто имеют гораздо большее число параметров, чем соответствующие физические модели. Они способны моделировать практически любой возможный процесс, имея достаточно данных.
Модели, написанные на декларативных языках для акаузальных моделей, обычно компилируются и/или интерпретируются в несколько шагов. Примечательно, что они обычно включают в себя такие шаги, как упрощение модели, преобразование данных и уравнений в формат, используемый решателем дифференциальных уравнений, инициализация переменных и применение решателя к начальным значениям для создания временных рядов.
Одной из возможных составляющих модели является модульный универсальный аппроксиматор функций, такой как нейронная сеть. Этот тип систем приобрел популярность благодаря своей способности моделировать любую нелинейную функцию с регулярным поведением и обучаться с параметризованной оптимизацией для достижения такого решения с разумной временной сложностью. При представлении данных от датчиков часто выявляется разница между вычисленными переменными и тем, что обнаружено датчиками, что может быть отнесено к разнице между моделью и реальным моделируемым процессом. В таких случаях во многих отраслях принято совершенствовать модели, когда входные и выходные значения можно измерить, используя простую регрессионную модель, параметры которой выбираются с помощью входных и выходных значений в математическом программном обеспечении, таком как Excel, для создания компонента регрессионного анализа в модели. Другим распространенным подходом является использование генетической оптимизации или методов оценки конечных разностей для улучшения параметров модели. Эти методы, как правило, медленные и плохо масштабируются в более крупные модели.
Системы управления, как правило, кодируются вручную, но существуют исключения. Распространенным методом оптимизации маломерной параметризованной политики управления является использование генетической оптимизации или методов конечных разностей, но они имеют плохие вычислительные свойства при масштабировании до более крупных задач. Еще одна распространенная система заключается в том, чтобы ограничить моделирование простыми приближенными моделями, такими как линейные модели, чтобы иметь возможность применять алгоритмы оптимизации, подходящие для таких простых систем, например, симплексный метод. Это распространено в оптимизации гидроэнергетики и других применениях.
Тщательный анализ, проведенный изобретателем, показал, что вычислительные задачи, с которыми сталкивается крупномасштабное моделирование, возможное в новом поколении декларативных акаузальных моделей в сочетании с универсальными аппроксиматора ми функций, могут быть решены с использованием методов, известных как автоматическое дифференцирование в обратном режиме, что можно реализовать в специально выполненных решателях дифференциальных уравнений в общем процессе интерпретации/компиляции модели. Такого рода системы и/или методы автоматического дифференцирования, усиленные интерпретацией/компиляцией, позволяют масштабировать свойства, которые возможны для миллионов параметров одновременно. Это можно использовать для вычисления производных по функции цели управления и/или функции ошибки моделирования и оптимизации модели и/или параметров управления с использованием метода, основанного на градиентном спуске/подъеме.
Таким образом, согласно конкретному примеру, обеспечена система, способная вычислять производную (производные), параметр (параметры) модели и/или параметр (параметры) управления на акаузальных декларативных языках, используя меньше вычислительных ресурсов, чем конкурирующие методы.
Нейронная сеть является одной из нескольких широко известных систем/методов машинного обучения, которые популярны благодаря легко параметризуемому способу увеличения сложности модели и способности сходиться к любому из большого класса общих функций по мере увеличения этого параметра. В настоящем документе мы также используем нейронную сеть для обозначения соответствующих машин опорных векторов, которые, как доказано, в значительной степени теоретически эквивалентны нейронным сетям.
В целом, нейронные сети, также обычно называемые искусственными нейронными сетями, можно рассматривать как вычислительные системы, создание которых в общих чертах обусловлено биологическими нейронными сетями, образующими мозг. Нейронная сеть сама по себе является не алгоритмом, а, скорее, основой для многих различных алгоритмов машинного обучения для совместной работы и обработки сложных входных данных. В некотором смысле, такие системы «учатся» выполнять задачи, рассматривая примеры, как правило, без программирования какими-либо правилами для конкретных задач. Нейронная сеть может быть основана на наборе связанных единиц или узлов, называемых искусственными нейронами, которые приблизительно моделируют нейроны в биологическом мозге. Каждое соединение, как и синапсы в биологическом мозге, может передавать сигнал от одного искусственного нейрона к другому. Искусственный нейрон, который получает сигнал, может обрабатывать его, а затем уведомлять дополнительные искусственные нейроны, связанные с ним. В распространенных вариантах осуществления сигнал в связи между двумя искусственными нейронами может быть представлен вещественным числом, а выходной сигнал каждого искусственного нейрона может быть вычислен посредством некоторой нелинейной функции суммы его входных сигналов. Связи между искусственными нейронами называются «синапсами». Искусственные нейроны и синапсы обычно имеют вес, который корректируется по мере обучения. Вес увеличивает или уменьшает силу сигнала в связи. Искусственные нейроны могут иметь такое пороговое значение, что сигнал отправляется только в том случае, если совокупный сигнал пересекает это пороговое значение. Как правило, искусственные нейроны агрегируются в слои. Различные слои могут выполнять различные виды преобразований на своих входах. Сигналы распространяются от первого слоя (входного слоя) к последнему слою (выходному слою), возможно, после многократного прохождения слоев. Со временем было разработано много различных типов более развитых нейронных сетей, например, сверточные нейронные сети, рекуррентные нейронные сети и иерархические нейронные сети.
Декларативная акаузальная модель обычно представляет собой модель, написанную на некотором декларативном акаузальном языке моделирования, но может также храниться в эквивалентной функциональности, написанной на любом языке программирования и/или эквивалентной компьютерно-читаемой кодировке. Примеры адаптированных языков моделирования, в частности, включают в себя языки Modelica и Modia. Эти декларативные акаузальные модели обязательно являются модульными, чтобы иметь возможность повторного использования компонентов. Декларативные акаузальные модели определяют уравнения между переменными, а не алгоритмы и обычно определяют направление вычислений: во время компиляции; решателем; и/или во время исполнения. Как правило, такие языки также поддерживают подкомпоненты с заданными направлениями, т.е. включение алгоритмов вместо уравнений. Это означает, что причинно-следственная и/или императивная подмодель, такая как императивная программа, может быть включена в более крупную акаузальную модель. Такие подкомпоненты также могут быть внешними по отношению к решателю в скомпилированном компьютерно-читаемом виде или на другом языке с отдельным решением оценки градиента. В этих случаях требуемая градиентная связь может быть установлена к подкомпоненту, установленному посредством интерфейса, и или от него к решателю.
Конкретный алгоритм может быть выбран в зависимости от причинно-следственной связи, выбранной решателем, что позволяет моделировать акаузальные системы, где доступны только алгоритмические описания.
Интерпретатор и/или компилятор декларативной акаузальной модели обычно представляет собой систему, которая получает или считывает модель из памяти. Он переводит уравнения и алгоритмы, закодированные там, посредством серии преобразований в формат, подходящий для прямого применения в решателях дифференциальных уравнений. В зависимости от контекста, решатель дифференциальных уравнений часто считается частью общего компилятора и/или интерпретатора языка моделирования. Обычно это происходит, если компилятор отправляет результаты в решатель дифференциальных уравнений, чтобы непосредственно генерировать программный код или результаты имитационного моделирования, без дальнейшего участия человека между ними. Здесь, для ясности, мы используем компилятор в отношении процессов до решателя дифференциальных уравнений, тогда как общий процесс компиляции/интерпретации может также включать этап решателя.
Решатель дифференциальных уравнений, также называемый решателем или симулятором, получает ряд уравнений и начальных значений в адаптированном формате данных и выдает временные ряды, описывающие состояние моделируемой системы. Одним из примеров таких решателей является CVODE. Решение дифференциальных уравнений во времени, возможно, является наиболее распространенным применением, но мы не ограничиваем наше изобретение такими задачами. Решатель дифференциальных уравнений также можно использовать для решения ряда систем уравнений без временного элемента и/или без зависимости от времени, а также недифференцируемых систем и/или подсистем. Одним из конкретных примеров являются подмодели, которые имитационно моделируют следующий временной шаг на основе текущего без явного вычисления этого, путем интегрирования скорости изменения. Решатель дифференциальных уравнений опирается на правильно сбалансированную систему уравнений, которая при необходимости может быть установлена после шага компиляции, если на этом шаге обеспечены данные от внешнего источника. Обычно это зависит от того, что компилятор знает, какие переменные будут определены до решателя, так что компилятор может установить правильное направление вычислений.
Используемое в настоящем документе выражение «автоматическое дифференцирование» обычно относится к семейству процедур, непосредственно применимых к программному коду, для эффективного вычисления производных без необходимости как вычислений человеком, так и автоматического символьного вычисления. Автоматическая система дифференцирования обычно вводит программный код и выдает программный код, который также вычисляет некоторые производные. Точнее говоря, автоматическое дифференцирование относится к ряду методов и систем, которые выполняют эффективное вычисление производных, и которые, в принципе, могут быть применены к чему-либо из большого набора общего программного кода без особых изменений. Однако автоматическое дифференцирование также относится к системе и/или методам, в которых код специально адаптирован для применения таких методов автоматического дифференцирования, например, как во фреймворках глубокого обучения.
Одним из видов автоматического дифференцирования является дифференцирование в обратном режиме. Здесь мы используем его для описания как дифференцирования только в обратном режиме, так и видов дифференцирования в смешанном режиме, когда некоторые подкомпоненты процесса дифференцирования выполняются другими компьютерно-реализуемыми методами дифференцирования, например, прямым дифференцированием и/или символьным дифференцированием и/или когда автоматическое дифференцирование в обратном режиме включено в более крупное символьное дифференцирование. В обратном режиме граф, лента и т.п. используется для описания выполняемых вычислений во время обычного выполнения и/или компиляции, известных как «прямой шаг». Эти граф, ленту и т.п. затем используют для выполнения вычислений в приближенном обратном порядке для вычисления производных одного или более значений в отношении одного или более параметров. Граф, лента и т.п. могут быть: динамически выведенными во время обработки на шаге вперед; явно предвычислеиными во время компиляции в статические граф, ленту и т.п.; и/или использоваться во время компиляции для создания программного кода для обратного режима.
Метод автоматического дифференцирования в обратном режиме может быть применен к решателю дифференциальных уравнений, в который компилятор подает свои результирующие дифференциальные уравнения. Тогда выходные данные решателя дифференциальных уравнений могут быть получены в отношении любых параметров модели. Решатель дифференциальных уравнений может потребовать некоторой незначительной модификации, чтобы быть дифференцируемым, например: смягчения границ принятия решений; выделения стохастических переменных посредством приемов репараметризации; и/или введения шума для пересечения дискретных событий, возможно, управляемых температурой или подобным параметром, который может быть отрегулирован во время обучения.
Функция ошибки или функция потерь обычно описывает, насколько велика ошибка нашей модели по отношению к некоторым данным. Это обычно определяется как монотонно возрастающая функция, по меньшей мере в некоторой окрестности, разницы между имитационно-смоделированными значениями и измеренными значениями. Эти измеренные значения, в свою очередь, могут быть необработанными входными сигналами от датчиков или значениями от датчиков, которые были предварительно обработаны с помощью некоторой функции, чтобы сделать показатели более релевантными и/или точными. Измеренные показатели сделают систему уравнений в некотором смысле переопределенной, так что у нас будет вычисленное значение и измеренное значение, которые можно сравнивать.
Функция потерь может быть построена для описания разницы между одним или более данными от датчиков и одним или более соответствующими выходными данными решателей дифференциальных уравнений. Используя автоматическое дифференцирование в обратном режиме на решателе дифференциальных уравнений, мы можем рассчитать градиент этой функции потерь в отношении одного или более параметров с вычислительной эффективностью и предпочтительной масштабируемостью с количеством параметров в вычислении для использования в оптимизаторе.
Функция потерь может быть использована как отдельный элемент, который вычисляет и выдает сигнал, соответствующий его градиенту, или может быть закодирована в соответствующем моделировании или другом формате компьютерного языка, который может обрабатываться автоматическим дифференцированием. Альтернативно, это переменная в самой модели, и функция потерь в этом случае является просто неявным или явным определением того, какое состояние в модели соответствует функции потерь. Есть много других тривиальных вариантов по этим и подобным темам, которые очевидны для специалиста.
Оптимизатор обычно представляет собой систему, которая принимает оценку градиента, вычисляет градиентный шаг в пространстве параметров и создает новые улучшенные параметры в соответствии со стратегией градиентного спуска или подъема. Оптимизатор обычно имеет постоянные переменные между обновлениями, такие как размер убывания шага и/или импульс. Многие такие широко известные оптимизаторы имеют гарантии конвергенции. После одного или более шагов оптимизатора у нас будет улучшенный набор параметров, который при желании может быть сохранен в памяти. Например, оптимизатор может также получать оценки градиента от одного или более источников перед выполнением одного обновления градиента. Параллелизация стохастического имитационного моделирования для оценки градиента по базовому распределению является одним из таких примеров. Обновления параметров можно выполнять в исходной акаузальной модели или в соответствующих переменных в любом из промежуточных форматов модели на более поздних стадиях процесса компиляции. Обновления параметров между итерациями оптимизатора можно выполнять непосредственно перед решателем, чтобы свести к минимуму издержки от других процессов компиляции. При такой работе оптимизатора, он непосредственно выдает решателю список параметров, а также может использовать статическую компиляцию в автоматическом дифференцировании в обратном режиме с целью дальнейшей минимизации вычислительных издержек. Однако в других случаях это может быть неподходящим, например, в случаях, когда значения параметров влияют на шаги обработки имитационного моделирования (т.е. список выполненных шагов обработки, в отличие от значений, используемых в этих шагах), и/или когда шаги обработки имитационного моделирования являются частично стохастическими.
Оптимизация систем управления с использованием данных от датчиков является сложной задачей и приносит огромную пользу за счет повторного использования знаний и возможностей людей и компонентов искусственного интеллекта взаимодействовать друг с другом для описания ситуаций, отличающихся от фактической измеряемой системы. Это может быть достигнуто за счет модульного и частично физического имитационного моделирования, описанного путем оптимизации модулей в соответствии со способом и/или системой, раскрытыми выше. Затем эти модули могут быть удалены и/или перестроены по мере необходимости, и в модель могут быть введены новые физические модули и/или модули искусственного интеллекта (ИИ). Новая модифицированная модель может затем описывать новую реальную или гипотетическую физическую систему и повторно использовать накопленные в ней знания, закодированные с помощью этой модульности, без необходимости сбора новых данных от датчиков, специфичных для новой системы. Один или более параметров нужной системы, влияющих на ее функционирование, называют «параметрами управления».
Цель управления можно рассматривать как систему, которая способна принимать временные ряды или мгновенные значения, описывающие полное или частичное состояние некоторого производственного процесса и/или модели производственного процесса, и автоматически оценивать успешность управления производственным процессом. Оценка успешности обычно кодируется в скалярном значении, где желательны более высокие значения. Разработка таких целей управления обычно осуществляется в соответствии с деловыми, экологическими и физическими целями. Мы используем надлежащим образом разработанную такую цель управления или ее выходные данные в качестве входных данных для наших системы и/или способа.
Оптимизатор управления обычно представляет собой систему, которая пытается улучшить параметризованный алгоритм управления. Оригинальный оптимизированный модуль из оптимизатора и/или новый модуль, собранный из вышеуказанных модулей, затем могут быть использованы для создания новой системы управления. Такая задача традиционно оптимизировалась с использованием генетической оптимизации и/или обучения с подкреплением, причем оба метода являются вычислительно сложными в крупномасштабных задачах. Вместо этого мы можем применить раскрытый выше процесс для компиляции и решения дифференциальных уравнений с использованием автоматического дифференцирования в обратном режиме, чтобы получить оценку градиента вычислительно-эффективным образом. Автоматическое дифференцирование теперь используется для расчета градиента цели управления в отношении наших параметров управления и для его направления в оптимизатор управления.
Оптимизатор управления получает оценку градиента из автоматического дифференцирования, применяемого к решателю дифференциальных уравнений при вводе нашей модели управления. Подходящая стратегия оптимизации на основе градиента с использованием оценки градиента применяется в один или более шагов. В случае общей формулировки, когда высокое значение от цели управления означает требуемую работу производственного процесса, применяется схема градиентного подъема. После оптимизации элементов управления с помощью оптимизатора управления, оптимизатор управления выдает конечные параметры и сохраняет их в памяти. Вопросы разработки оптимизатора управления аналогичны тем, которые требуются при разработке оптимизатора.
Оптимизированные параметры управления опционально могут использоваться в имитационном моделировании для оценки политики управления и/или оценки производственного и/или технического процесса с использованием такой оптимизированной политики управления. Затем параметры управления могут быть реализованы в программной и/или аппаратной реализации управления и установлены в соответствующем производственном и/или техническом процессе. Альтернативно, один или более сигналов, создаваемых оптимизированной политикой управления в имитационном моделировании управления, могут быть использованы для непосредственного управления реальным производственным и/или техническим процессом.
На фиг. 9 представлена схема, иллюстрирующая другой конкретный пример реализованной с процессором и памятью системы для расчета и/или адаптации модели, связанной с производственным и/или техническим процессом. Это представляет собой пример реализации с процессором и памятью, где компилятор, решатель дифференциальных уравнений, оцениватель автоматического дифференцирования в обратном режиме и оптимизатор реализованы посредством процессора 110, а параметры модели хранятся и обновляются в памяти 120.
Далее будут приведены один или более неограничивающих примеров производственных и/или технологических применений, включая примеры возможных входных данных в систему, а также работы подмодулей.
В одном из конкретных примеров, в качестве входных данных для компилятора дана проработанная в Modelica модель генератора мощности, связанного с турбиной. Модель генератора, главным образом, основана на физических уравнениях, но включает в себя нейронную сетевую модель, которая аппроксимирует влияние температуры и влажности на некоторое внутреннее сопротивление. Выходная электрическая мощность в зависимости от времени считается неизвестной в модели, которая зависит от неизвестной механической входной мощности, или наоборот. Оператор имеет результаты измерений входной и выходной мощности по данным от датчиков. Он использует компилятор для трансляции модели в Modia и преобразования этой модели в набор переменных и дифференциальных уравнений на известном языке программирования Julia, подходящем для ввода в решатель дифференциальных уравнений на основе Julia. Это создает так называемую Julia-функцию, которая способна имитационно моделировать выходную мощность при заданной входной мощности (или наоборот, если мы так проинструктируем компилятор). Затем оператор применяет автоматическое дифференцирование к этой функции, чтобы создать новую функцию, которая при решении также генерирует функцию, которая может вычислять производные. Эта новая функция является нашим решателем дифференциальных уравнений и компилируется в эффективный машинный код. Затем оператор выдает решателю дифференциальных уравнений наши данные о механической входной мощности, чтобы сгенерировать выходные данные и сравнить сгенерированную выходную мощность с выходной мощностью, полученной на основе данных от датчиков. Эта оценка градиента подается в оцениватель автоматического дифференцирования в обратном режиме, и для каждого параметра в модели генерируется оценка градиента. Эта оценка градиента отправляется в оптимизатор, который считывает параметры и делает небольшой градиент спуска/подъема на основе обновления некоторых параметров в нейронной сетевой подмодели и некоторых параметров в общей модели физического генератора с целью уменьшения потерь. Этот процесс повторяется до тех пор, пока потери не будут достаточно уменьшены, а пары входных-выходных данных модели будут лучше соответствуют данным, полученным от датчиков.
На фиг. 10 представлена схема, иллюстрирующая другой конкретный пример реализованной с процессором и памятью системы для оценки и/или адаптации модели, связанной с моделью/системой управления для производственного и/или технического процесса. Это представляет собой пример реализации на основе процессора и памяти, где компилятор, решатель дифференциальных уравнений, оцениватель автоматического дифференцирования в обратном режиме и оптимизатор реализованы посредством процессора 110, а так называемые параметры оценки значений хранятся и обновляются в памяти 120.
Далее будут приведены дополнительные неограничивающие примеры производственных и/или технологических применений, включая примеры опциональных входных данных в систему, а также работы подмодулей.
В еще одном примере местная компания по водоснабжению разрабатывает Modia-модель муниципальной системы откачки и накопления сточных вод и использует подключаемое программное обеспечение для географической информационной системы для создания ряда дифференциальных уравнений в виде сочетания кода С++ и предварительно скомпилированных исполняемых двоичных файлов, которые взаимодействуют с кодом С++ через функциональный интерфейс макетирования (FMI, Functional Mock-up Interface). Некоторые трубопроводные системы в модели откачки были абстрагированы с использованием обученных нейронных сетей. Компания определяет цель управления, которая принимает меры к модели за поддержание очень высоких уровней воды в резервуарах, а также принимает к ней меры за значение, пропорциональное затратам на электроэнергию, и включает ее в качестве переменной в модель Modelica. Переменная цели управления разработана таким образом, что она суммирует все прошлые затраты и высокие уровни воды за имитационно моделируемое время. Физическая реализация нейронной сети имитационно моделируется в программном обеспечении. Модель компилируется в решатель, который реализован на Python со ссылками на код С++ и двоичные форматы, и в который можно ежечасно вводить цены на электроэнергию. Решатель дифференциальных уравнений автоматически считывается другим компилятором, генерирующий соответствующее сочетание Python, С++ и форматов исполняемого двоичного компьютерно-читаемого кода, который принимает состояния имитационного моделирования и вычисляет градиенты двух конкретных искомых параметров управления по отношению к цели управления в так называемом статическом дифференцировании в обратном режиме, которое генерирует оцениватель частичного автоматического дифференцирования в обратном режиме. Если цена на электроэнергию не указывается, то решатель предполагает некоторую постоянную цену. Имитационно-моделируемые состояния вводятся в предварительно скомпилированный оцениватель частичного автоматического дифференцирования в обратном режиме и генерируются градиенты. Оптимизатор получает эти оценки градиента и использует стратегию градиентного спуска/подъема для настройки параметров управления. Параметры управления снова подаются в решатель дифференциальных уравнений, который отправляет состояние в оцениватель частичного автоматического дифференцирования в обратном режиме (при этом код остается статическим между итерациями) в несколько итераций до тех пор, пока параметры управления приблизительно не достигнут локального оптимума в отношении цели управления. Эти параметры управления сохраняются на диске и передаются/продаются заказчику в качестве оптимальной настройки для этих параметров управления в физической системе, моделируемой моделью.
В другом примере можно смоделировать ряд гидроэлектростанций и водохранилищ. В таком примере кривые объема-высоты водохранилища и кривые эффективности турбины могут быть смоделированы нейронными сетями, тогда как аварийные сбросы и трубопроводы по характеру могут быть физическими. Обилие данных может сделать нейронную сеть предпочтительной моделью, тогда как чрезвычайные сценарии случаются редко и могут быть лучше смоделированы с использованием физических априорных знаний и допущений, чем с тем небольшим количеством доступных данных. Параметры этих физических систем могут быть оптимизированы с использованием методологии, описанной здесь, когда доступны некоторые дополнительные данные или они могут быть полностью заменены моделями нейронных сетей. Тогда вся модель или любая часть модели может быть обучена с использованием автоматического дифференцирования в обратном режиме и доступных данных. Далее в нашем примере, после определения модели гидроэлектростанций и водохранилищ, мы можем настроить параметризованную систему управления, которая принимает уровни водохранилищ и фьючерсы на электроэнергию в ближайшие несколько дней в качестве входных и выходных данных рекомендуемого текущего производственного уровня на каждой электростанции для того, чтобы эксплуатировать гидроэлектростанции с максимальной эффективностью, в то же время сохраняя водохранилища в эксплуатационных пределах благодаря фактору принятия мер, который зависит от степени нарушения этих пределов. Модель предпочтительно стохастического типа, чтобы создать имитационное моделирование методом Монте-Карло для управления рисками. Обучение может происходить на исторических или имитационно-смоделированных внешних притоках воды в водохранилища, при этом имитационное моделирование может быть статистическим распределением, которое было разработано на основе отдельного набора данных. Затем система управления обучается оптимально задавать производство электроэнергии в каждый момент времени или в течение короткого периода времени, чтобы генерировать наиболее эффективную работу во времени, учитывая не мгновенные выгоды при оптимизации политики. Результирующая система управления может быть имитационно смоделирована многократно в модели с различными случайными начальными числами, чтобы отобразить приблизительные доверительные интервалы для операторов-людей. Инструкции также могут быть отправлены непосредственно в системы диспетчерского управления и сбора данных (SCADA, Supervisory Control And Data Acquisition) для непосредственной автономной эксплуатации станций, что может быть особенно ценно на небольших гидроэлектростанциях.
Альтернативно, в вышеприведенном примере мы можем рассмотреть более традиционное нестохастическое имитационное моделирование и задать производственный уровень в каждый момент в качестве независимого параметра. Затем генерируются временные ряды состояний в течение нескольких дней или недель, и мы можем оптимизировать производственный уровень на каждом временном шаге, чтобы максимизировать прибыль. Несколько таких производственных планов могут быть инициализированы в поиске по сетке, и каждый из них оптимизируют во избежание неоптимальных локальных минимумов.
В другом примере производитель автомобилей может захотеть оптимизировать стратегию динамического впрыска топлива в двигатель. Двигатель смоделирован физически со многими неизвестными параметрами. Зависимость сопротивления от давления воздуха трудно смоделировать с помощью известных физических принципов, и вместо этого вставлена нейронная сеть. Стохастическая стратегия впрыска топлива используется для изучения параметров двигателя в серии физических испытаний. Выходную мощность и выхлоп двигателя можно физически измерить, но в остальном инженеры-испытатели не имеют доступа к внутренним частям двигателя во время работы. Используются пары из входных данных впрыска топлива и выходных данных мощности для обучения всей модели с использованием автоматического дифференцирования в обратном режиме для поиска оптимальных физических параметров, которые объясняли бы то, что измерено, включая нейронные сети. Несмотря на то, что у нас нет возможности измерить пары ввода-вывода для нейронных сетей, которые можно было бы использовать для обучения параметров нейронной сети по отдельности, автоматический процесс дифференцирования, используемый в соответствии с изобретением, выводит, как вся модель двигателя зависит от этих параметров и способен оптимизировать нейронную сеть одновременно с физическими параметрами. После того, как модель была оптимизирована по данным от датчиков, ряд простых параметризованных логических затворов, управляющих впрыском топлива, моделируется и оптимизируется с использованием автоматического дифференцирования в обратном режиме с целью минимизации расхода топлива и минимизации определенных выхлопных газов при определенной мощности. Параметры логических затворов затем используются для создания соответствующего физического контроллера двигателя автомобиля.
В еще одном примере телекоммуникационному оператору или провайдеру услуг связи требуется оптимизировать работу своих сетей связи с коммутацией пакетов. Подрядчик разрабатывает гибридную физическую модель, основанную на комбинации дискретных моделей событий, моделирующих отдельные пакеты, и потоковых моделей средних скоростей передачи. Модель реализована в Modelica и отправлена телекоммуникационному оператору. Телекоммуникационный оператор принимает решение использовать свои базы данных для оптимизации модели и корректировки своей работы на этом основании. Компания добавляет нейронную сеть для моделирования вероятностей связи и нагрузок в зависимости от времени, дня недели и времени года. Нейронной сетевой модели дорабатываются с использованием реальных данных передачи, собранных из ее работы, и снижения потерь с помощью автоматического дифференцирования в обратном режиме на решателе для модели в подходящих пакетах Modia Julia.
Далее в этом примере оператор связи хотел бы рассчитать новое расширение пропускной способности своей сети. Компания добавляет соответствующие соединения в модель, определяет цель управления для снижения потерь модели, которая представляет собой линейную комбинацию средних скоростей передачи и минимальных общих пакетных потерь и средней задержки. Компания имитационно моделирует это по году имитационно-моделируемого времени и применяет автоматическое дифференцирование в обратном режиме к решателю, чтобы найти производную от цели управления в отношении различных параметров протокола управления передачей (TCP, transmission control protocol) и использует оптимизатор для осуществления настройки TCP. Общая производительность такой сети с настроенным TCP затем оценивается в результирующей модели. Компании сравнивают эту смоделированную производительность с текущей производительностью, чтобы принять решение о том, следует ли и/или как расширить пропускную способность сети. Если принято решение о выполнении расширения, то параметры из настройки TCP могут быть применены непосредственно к параметрам TCP, используемым в сети.
Как можно видеть, предлагаемая технология, в общем, применима к любой производственной и/или технической системе, работающей в физической среде с заданными эксплуатационными ограничениями и/или условиями.
Например, предлагаемая технология может быть применена для улучшенного адаптивного моделирования и/или управления по меньшей мере частью производственной и/или технической системы для по меньшей мере одной из таких отраслей, как промышленное производство, переработка и упаковка, автомобилестроение и транспорт, горнодобывающая промышленность, целлюлозно-бумажная промышленность, инфраструктура, энергетика и электроснабжение, телекоммуникации, информационные технологии, аудио/видео, науки о жизни, нефтяная отрасль, газовая отрасль, водоочистка, санитарная обработка и/или аэрокосмическая отрасль.
Следует понимать, что способы и устройства, раскрытые выше, могут быть скомбинированы и перестроены различным образом, и что способы могут осуществляться одним или более соответствующим образом запрограммированными или выполненными цифровыми сигнальными процессорами и другими известными электронными схемами (например, дискретными логическими вентилями, соединенными между собой для выполнения специализированной функции, или специализированными интегральными схемами).
Многие аспекты настоящего изобретения раскрыты с точки зрения последовательностей действий, которые могут быть выполнены, например, элементами программируемой компьютерной системы.
Шаги, функции, процедуры и/или блоки, раскрытые выше, могут быть реализованы в аппаратном обеспечении с использованием любой традиционной технологии, такой как технология дискретных схем или интегральных схем, включая как электронные схемы общего назначения, так и специализированные схемы.
Альтернативно, по меньшей мере некоторые из шагов, функций, процедур и/или блоков, раскрытых выше, могут быть реализованы в программном обеспечении для выполнения подходящим компьютером или процессорным устройством, таким как микропроцессор, цифровой сигнальный процессор (DSP) и/или любое подходящее программируемое логическое устройство, такое как программируемая пользователем вентильная матрица (FPGA, Field Programmable Gate Array) и программируемый логический контроллер (PLC, Programmable Logic Controller).
Следует также понимать, что может быть возможно повторное использование общих возможностей обработки для любого устройства, в котором реализовано изобретение. Также может быть возможно повторное использование существующего программного обеспечения, например, путем перепрограммирования существующего программного обеспечения или путем добавления новых программных компонентов.
Также возможно обеспечить решение, основанное на комбинации аппаратного и программного обеспечения. Фактическое секционирование аппаратно-программного обеспечения может быть определено разработчиком системы на основе ряда факторов, включая скорость обработки, стоимость внедрения и другие требования.
На фиг. 11 представлена схема, иллюстрирующая пример компьютерной реализации 100 в соответствии с одним из вариантов осуществления. В этом конкретном примере, по меньшей мере некоторые из шагов, функций, процедур, модулей и/или блоков, раскрытых в настоящем документе, реализованы в компьютерной программе 125; 135, которая загружена в память 120 для выполнения схемой обработки, включающей в себя один или более процессоров 110. Процессор (процессоры) 110 и память 120 соединены между собой для обеспечения нормального выполнения программного обеспечения. Опциональное устройство 140 ввода/вывода также может быть соединено с процессором (процессорами) 110 и/или памятью 120 для обеспечения ввода и/или вывода соответствующих данных, таких как входной параметр (входные параметры) и/или результирующий (результирующие) выходной параметр (выходные параметры).
Термин «процессор» следует интерпретировать в общем смысле как любую систему или устройство, способное выполнять программный код или компьютерные программные инструкции для выполнения конкретной задачи обработки, определения или вычисления.
Таким образом, схема обработки, включающая в себя один или более процессоров 110, выполнена с возможностью осуществления при выполнении компьютерной программы 125 четко определенных задач обработки, таких как раскрытые в настоящем документе.
В одном из конкретных примеров обеспечена компьютерная программа 125; 135, содержащая инструкции, которые при их выполнении по меньшей мере одним процессором 110 побуждают по меньшей мере один процессор 110:
- получать полностью или частично акаузальную модульную параметризованную модель управления для производственного и/или технического процесса, при этом полностью или частично акаузальная модель процесса определена так, чтобы производственный и/или технический процесс по меньшей мере частично моделировался одной или более нейронными сетями, используемыми в качестве универсального аппроксиматора (универсальных аппроксиматоров) функций;
- имитационно моделировать производственный и/или технический процесс на основе полностью или частично акаузальной модульной параметризованной модели процесса и соответствующей системы дифференциальных уравнений;
- применять автоматическое дифференцирование в обратном режиме в отношении системы дифференциальных уравнений для генерирования оценки, представляющей собой расчет модели производственного и/или технического процесса; и
- обновлять по меньшей мере один параметр параметризованной модели процесса для производственного и/или технического процесса на основе сгенерированной расчетной с использованием процедуры градиентного спуска или подъема.
В другом примере приведена компьютерная программа 125; 135, содержащая инструкции, которые при их выполнении по меньшей мере одним процессором 110 побуждают по меньшей мере один процессор 110:
- получать полностью или частично акаузальную модульную параметризованную модель управления для процесса управления, осуществляемую системой управления, управляющей по меньшей мере частью производственного и/или технического процесса, включая один или более параметров полностью или частично акаузальной модульной параметризованной модели управления, причем процесс управления по меньшей мере частично моделируется одной или более нейронными сетями, используемыми в качестве универсального аппроксиматора (универсальных аппроксиматоров) функций;
- имитационно моделировать процесс управления, осуществляемый системой управления, на основе полностью или частично акаузальной модульной параметризованной модели управления и соответствующей системы дифференциальных уравнений;
- применять автоматическое дифференцирование в обратном режиме в отношении системы дифференциальных уравнений для генерирования расчетной оценки модели управления; и обновлять по меньшей мере один параметр параметризованной модели управления на основе расчетной оценки модели управления с использованием процедуры градиентного спуска или подъема.
Схема обработки не обязательно должна быть выделена только для выполнения вышеуказанных шагов, функций, процедур и/или блоков, но может также выполнять другие задачи.
Кроме того, настоящее изобретение можно дополнительно считать полностью воплощенным в любой форме компьютерно-читаемого носителя информации, с сохраненным на нем соответствующим набором инструкций для использования или в связи с исполняющей (исполняющим) инструкции системой, аппаратурой или устройством, например, компьютерной системой, системой, содержащей процессор, или другой системой, которая может получать инструкции от носителя и выполнять указанные инструкции.
Программное обеспечение может быть реализовано в виде компьютерного программного продукта, который обычно переносится на долговременном компьютерно-читаемом носителе, например, на CD, DVD, USB-накопителе, жестком диске или любом другом обычном запоминающем устройстве. Таким образом, программное обеспечение может быть загружено в операционную память компьютера или эквивалентной системы обработки для выполнения процессором. Компьютер/процессор не обязательно должен быть предназначен только для выполнения вышеописанных шагов, функций, процедур и/или блоков, но может также выполнять другие программные задачи.
Блок-схема или схемы, представленные в настоящем документе, могут рассматриваться как компьютерные блок-схема или схемы, когда они выполняются одним или более процессорами. Соответствующее устройство может быть определено как группа функциональных модулей, где каждый шаг, выполняемый процессором, соответствует функциональному модулю. В этом случае функциональные модули реализуются в виде компьютерной программы, запущенной на процессоре.
Таким образом, компьютерная программа, находящаяся в памяти, может быть организована в виде соответствующих функциональных модулей, обеспечивающих осуществление, при их выполнении процессором, по меньшей мере части шагов и/или задач, раскрытых в настоящем документе.
Альтернативно, можно реализовать модуль (модули) преимущественно в виде аппаратных модулей или, альтернативно, аппаратного обеспечения, с надлежащими взаимосвязями между соответствующими модулями. Конкретные примеры включают в себя один или более надлежащим образом выполненных цифровых сигнальных процессоров и другие известные электронные схемы, например, дискретные логические вентили, соединенные между собой для выполнения специализированной функции, и/или специализированные интегральные схемы (ASIC, Application Specific Integrated Circuit), как упоминалось ранее. Другие примеры подходящего для использования оборудования включают в себя схемы ввода-вывода (I/O) и/или схемы для приема и/или отправки сигналов. Степень использования программного обеспечения по сравнению с аппаратным обеспечением заключается исключительно в выборе реализации.
Становится все более популярным предоставление вычислительных услуг (аппаратного и/или программного обеспечения) с доставкой ресурсов в качестве услуги в удаленные места по сети. Например, это означает, что функциональные возможности, раскрытые в настоящем документе, могут быть распределены или перемещены на один или более отдельных физических узлов или серверов. Функциональные возможности могут быть перемещены или распределены на одну или более совместно действующих физических и/или виртуальных машин, которые могут быть размещены в отдельном физическом узле (узлах), т.е. в так называемом облаке. Иногда это также называют облачными вычислениями, которые являются моделью для обеспечения повсеместного сетевого доступа по требованию к пулу настраиваемых вычислительных ресурсов, таких как сети, серверы, хранилища, приложения и общие или настраиваемые службы.
Варианты осуществления, раскрытые выше, следует понимать как несколько иллюстративных примеров настоящего изобретения. Специалистам в данной области техники будет понятно, что различные модификации, комбинации и изменения можно внести в варианты осуществления, не отходя от объема настоящего изобретения. В частности, различные решения для деталей в различных вариантах осуществления могут быть объединены в других конфигурациях, где это технически возможно.
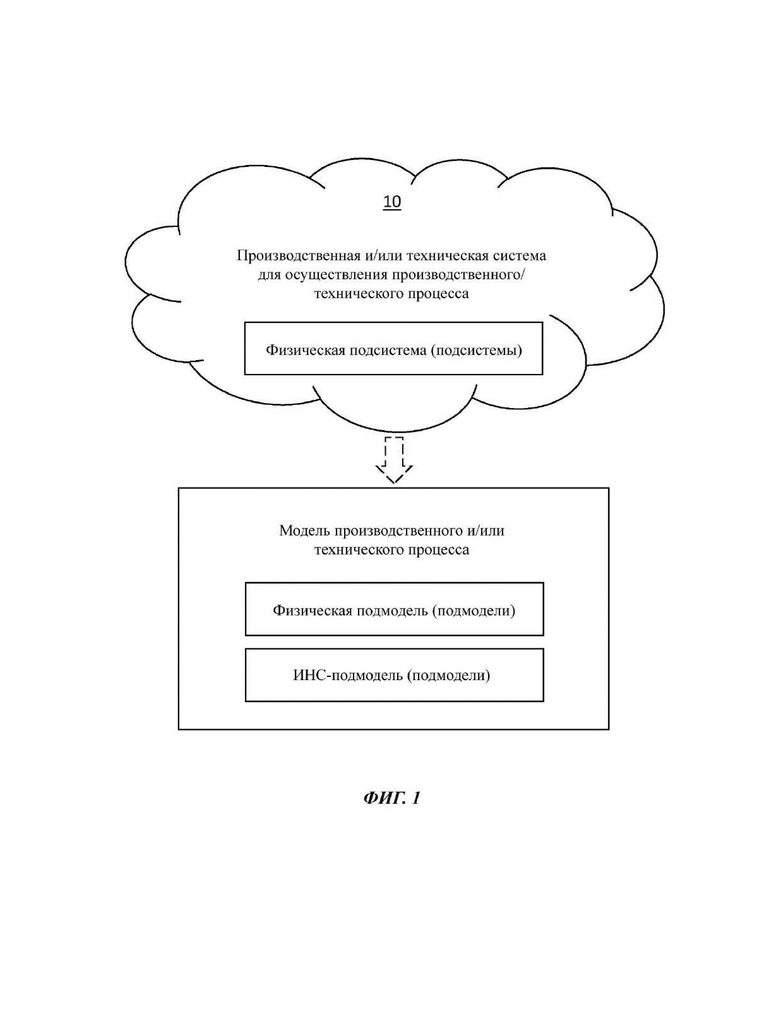

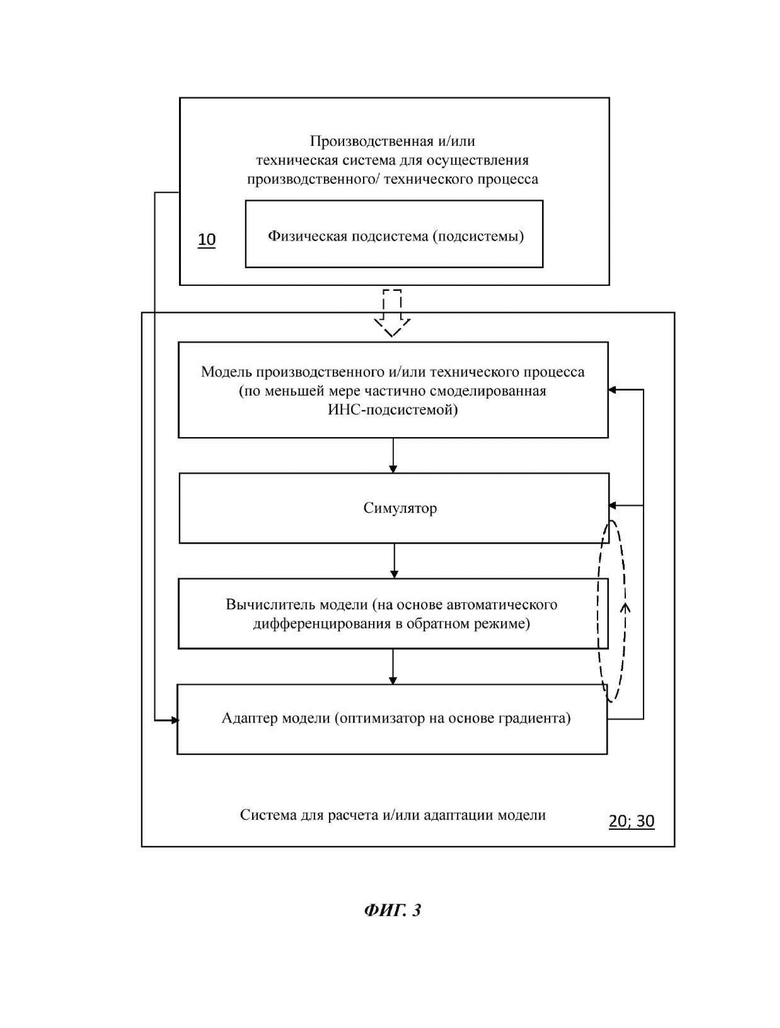
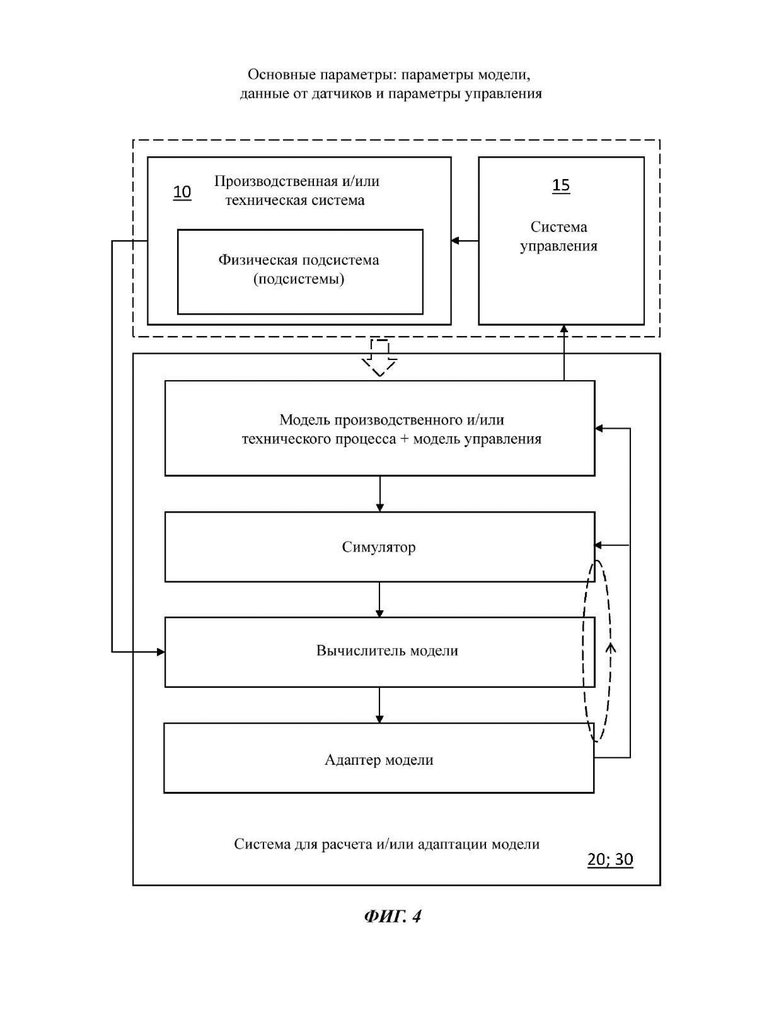
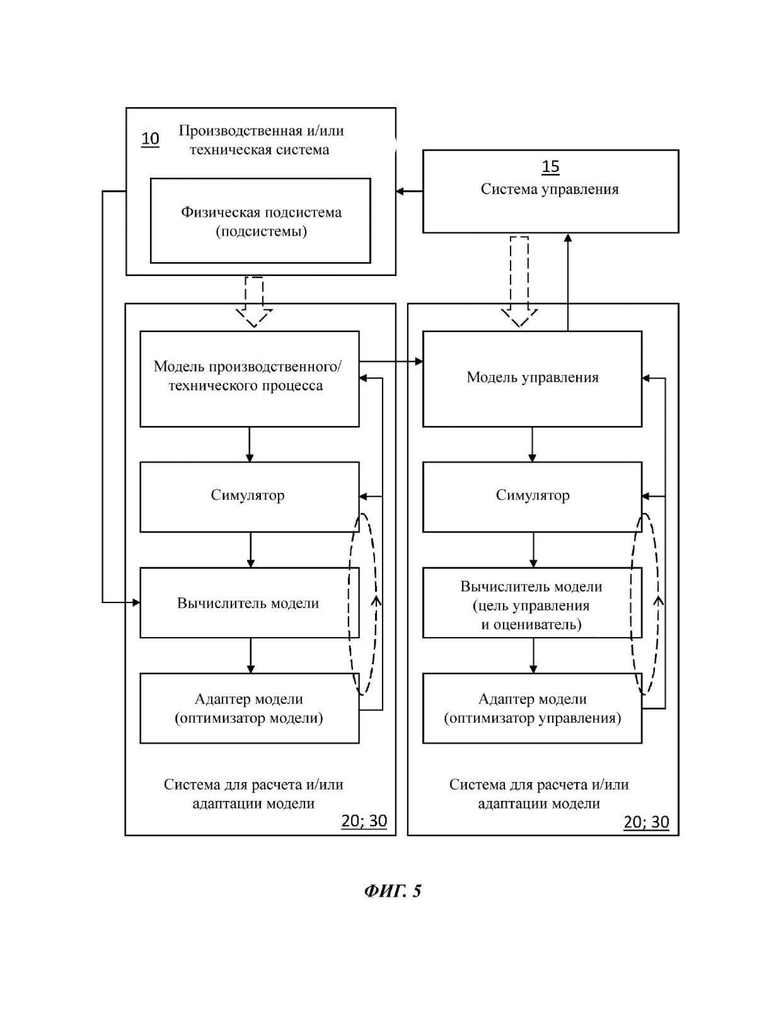
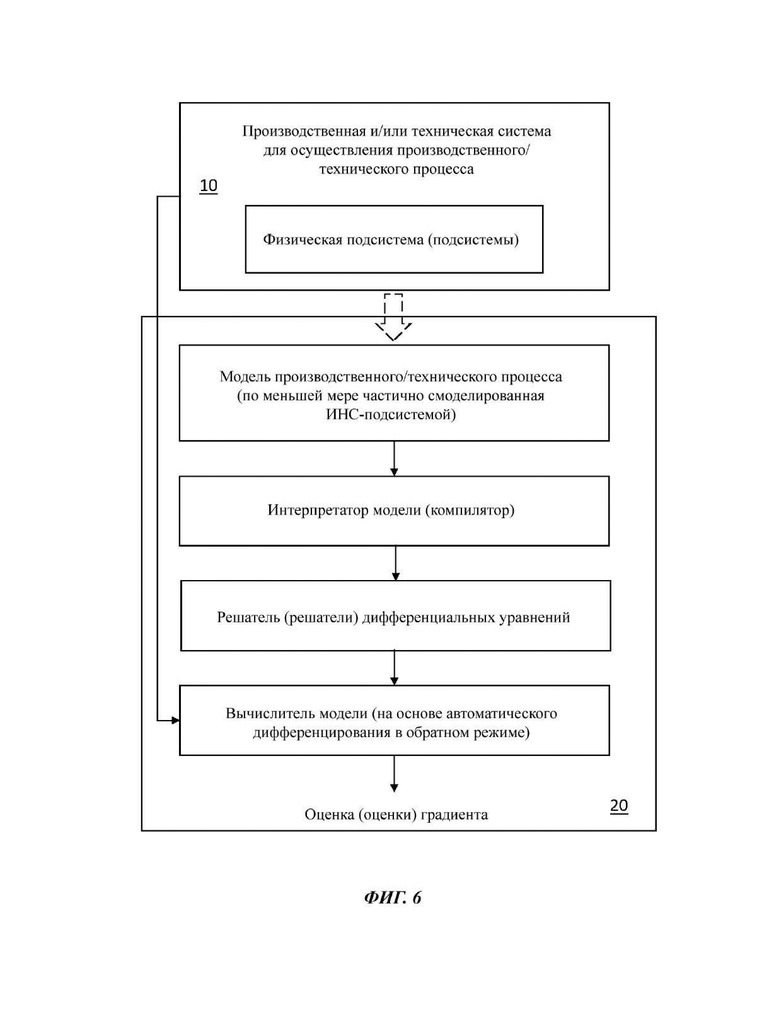
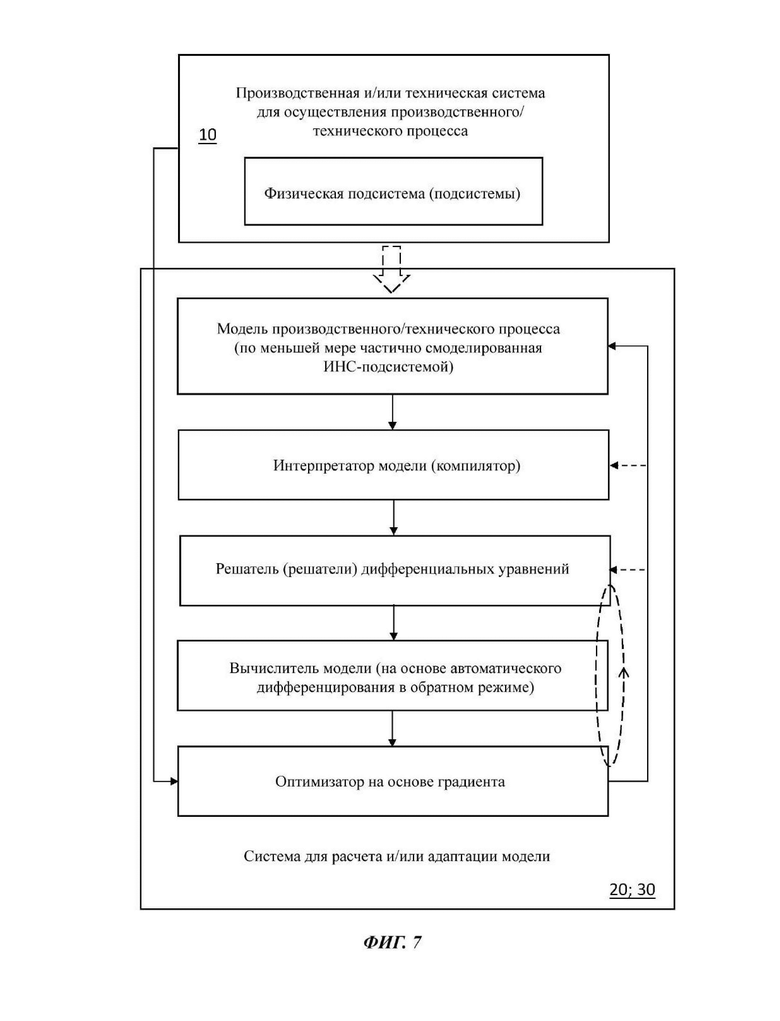
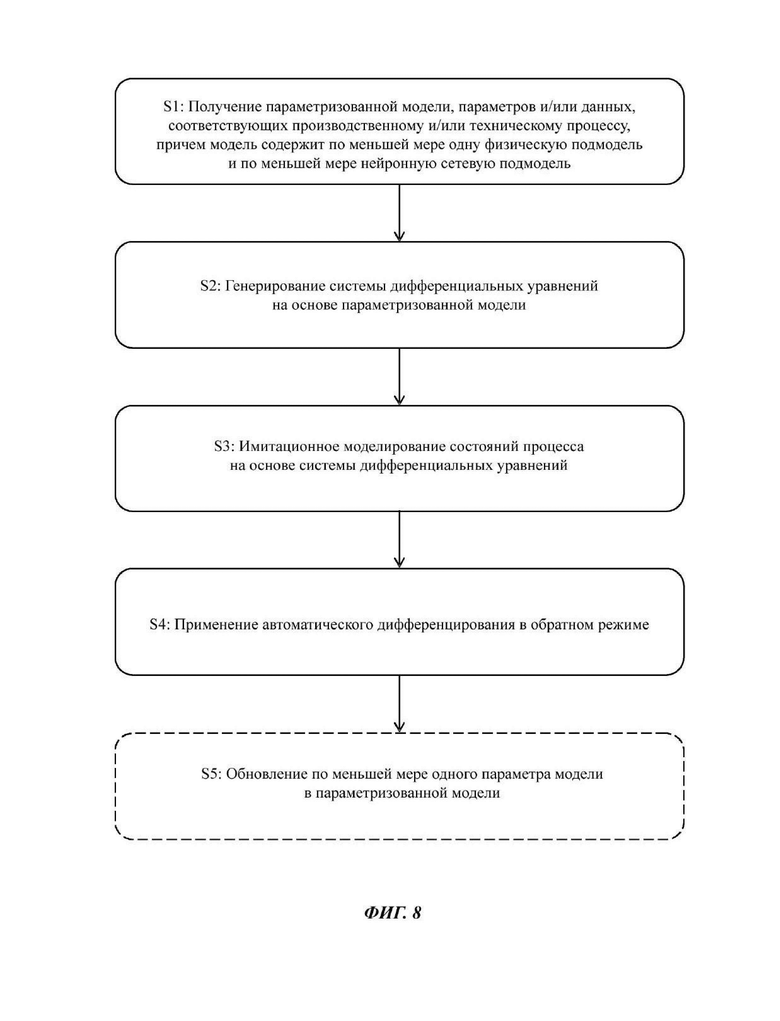

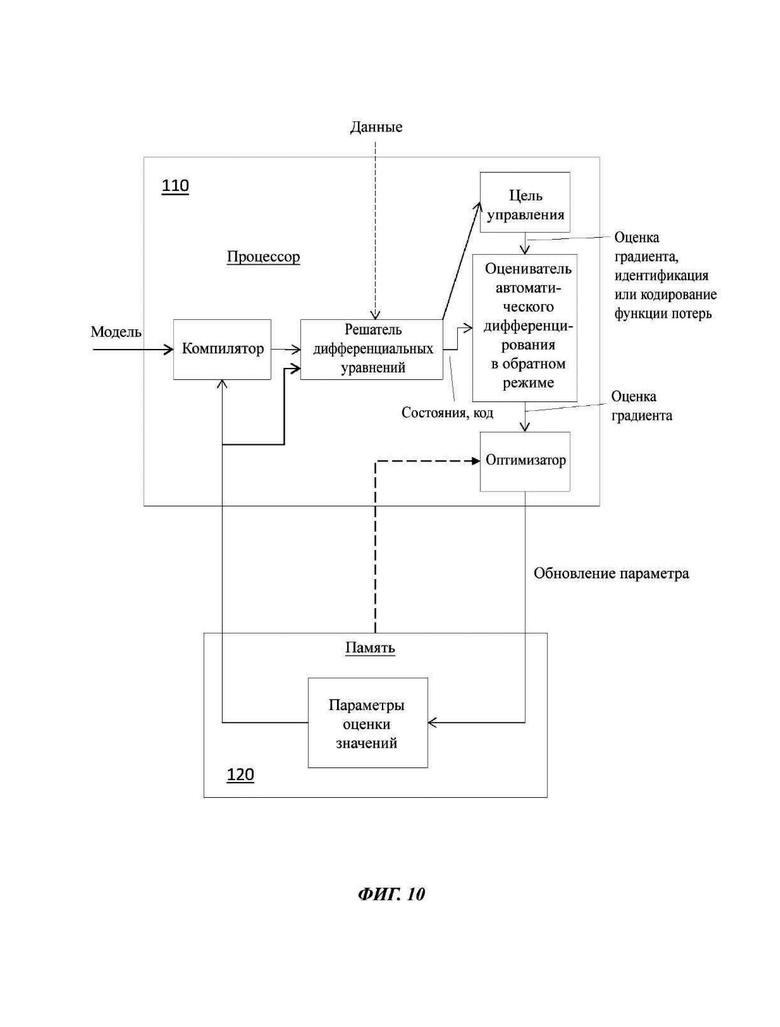
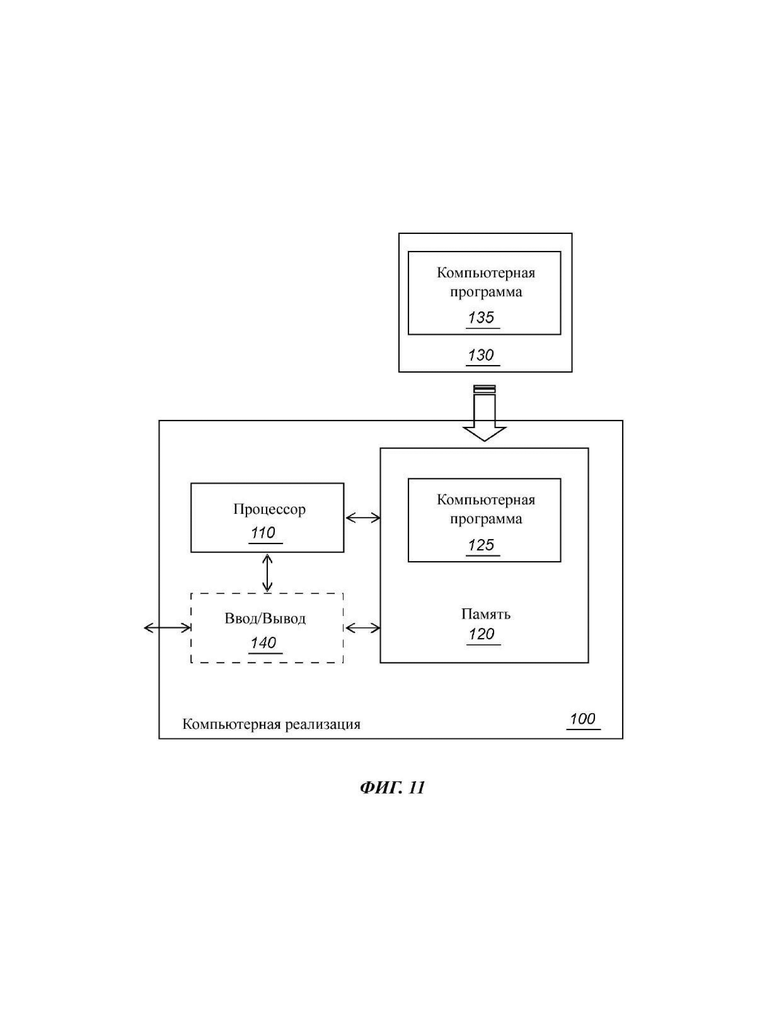
Изобретение относится к производственным и/или техническим процессам и управлению процессами, а конкретнее - к технической области производственного/технического моделирования и/или оптимизации параметров моделей/управления. Способ содержит получение (S1) полностью или частично акаузальной модульной параметризованной модели производственного и/или технического процесса, содержащей по меньшей мере одну физическую подмодель и по меньшей мере нейронную сетевую подмодель, включая один или более параметров параметризованной модели. Способ также содержит генерирование (S2) системы дифференциальных уравнений на основе параметризованной модели и имитационное моделирование (S3) динамических характеристик одного или более состояний производственного и/или технического процесса во времени на основе системы дифференциальных уравнений. Способ также содержит применение (S4) автоматического дифференцирования в обратном режиме в отношении системы дифференциальных уравнений при имитационном моделировании производственного и/или технического процесса для генерирования оценки, представляющей собой расчет модели производственного и/или технического процесса. Способ также содержит обновление (S5) по меньшей мере одного параметра модели процесса в полностью или частично акаузальной модульной параметризованной модели процесса для производственного и/или технического процесса на основе расчетной оценки с применением процедуры градиентного спуска или подъема для использования при создании сигналов управления, управляющих работой производственного и/или технического процесса. Технический результат – обеспечение возможности адаптации технической модели производственных и/или технических процессов, а также улучшение управления производственными и/или техническими процессами. 5 н. и 11 з.п. ф-лы, 11 ил.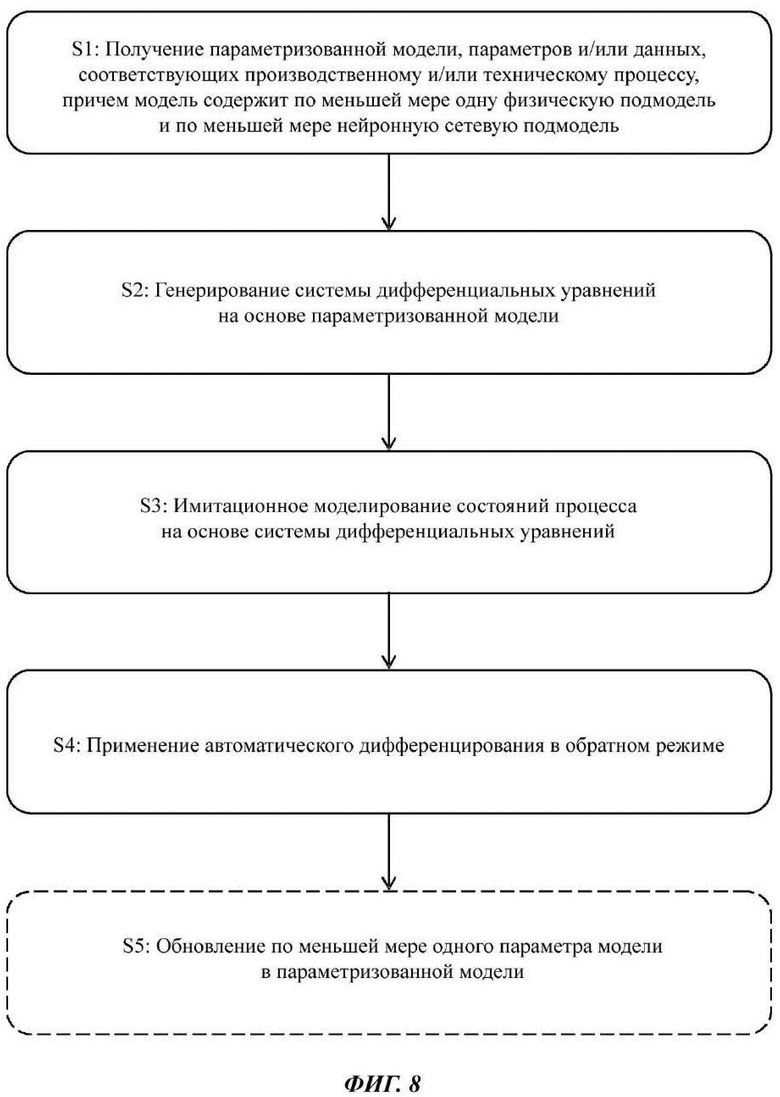
1. Система (20; 30; 100) для обеспечения управления производственной и/или технической системой, предназначенной для осуществления производственного и/или технического процесса, причем указанная система содержит:
- один или более процессоров (110);
- память (120), выполненную с возможностью хранения: полностью или частично акаузальной модульной параметризованной модели процесса для указанного производственного и/или технического процесса, также называемой параметризованной моделью процесса, содержащей по меньшей мере одну физическую подмодель и по меньшей мере одну нейронную сетевую подмодель, используемую в качестве универсального аппроксиматора функций для по меньшей мере частичного моделирования производственного и/или технического процесса, включая один или более параметров модели процесса для полностью или частично акаузальной модульной параметризованной модели процесса, а также технических данных от датчиков, включая один или более параметров временных рядов, поступающих из одной или более систем сбора данных, осуществляющих контроль производственного и/или технического процесса;
- симулятор, выполненный с возможностью, посредством одного или более процессоров (110), имитационного моделирования динамических характеристик одного или более состояний производственного и/или технического процесса во времени на основе полностью или частично акаузальной модульной параметризованной модели процесса и соответствующей системы дифференциальных уравнений, и
- вычислитель, выполненный с возможностью, посредством одного или более процессоров (110), применения автоматического дифференцирования в обратном режиме в отношении системы дифференциальных уравнений при имитационном моделировании производственного и/или технического процесса с целью генерирования расчетной оценки, представляющей собой расчет параметризованной модели процесса для производственного и/или технического процесса; причем вычислитель дополнительно выполнен с возможностью генерирования расчетной оценки по меньшей мере частично на основе технических данных от датчиков; и
модуль адаптации, выполненный с возможностью, посредством одного или более процессоров (110), приема расчетной оценки для обновления по меньшей мере одного параметра модели процесса в полностью или частично акаузальной модульной параметризованной модели процесса для производственного и/или технического процесса на основе процедуры градиентного спуска или подъема, и направления обновленного параметра (обновленных параметров) модели процесса для использования при создании сигналов управления, управляющих работой производственного и/или технического процесса,
при этом система (20; 30; 100) дополнительно содержит, как часть симулятора:
- компилятор, выполненный с возможностью, посредством одного или более процессоров (110), приема параметризованной модели процесса и создания системы дифференциальных уравнений;
- один или более решателей дифференциальных уравнений, выполненных с возможностью, посредством одного или более процессоров (110), приема системы дифференциальных уравнений и имитационного моделирования производственного и/или технического процесса во времени,
причем решатель (решатели) дифференциальных уравнений выполнен с возможностью (выполнены с возможностью), посредством одного или более процессоров (110), имитационного моделирования динамических характеристик состояния (состояний) производственного и/или технического процесса во времени, а вычислитель выполнен с возможностью, посредством одного или более процессоров (110), генерирования оценки градиента, относящегося к одному или более состояниям, полученным из решателя (решателей) дифференциальных уравнений в отношении по меньшей мере одной функции потерь, для выдачи в модуль адаптации модели.
2. Система по п. 1, в которой указанная по меньшей мере одна функция потерь представляет ошибку имитационного моделирования при моделировании производственного и/или технического процесса.
3. Система по п. 2, в которой указанная по меньшей мере одна функция потерь представляет расхождение между i) основанным на модели имитационно-смоделированным производственным и/или техническим процессом и ii) реальным представлением производственного и/или технического процесса, по меньшей мере частично основанным на технических данных от датчиков из одной или более систем сбора данных.
4. Система по п. 1, в которой модуль адаптации содержит:
- оптимизатор, выполненный с возможностью, посредством одного или более процессоров (110): приема одного или более параметров модели из памяти; приема расчетной оценки из вычислителя и обновления одного или более параметров модели процесса на основе процедуры градиентного спуска или подъема, а также сохранения обновленных параметров в памяти.
5. Система по п. 4, в которой оптимизатор выполнен с возможностью, посредством одного или более процессоров (110), приема оценки градиента из вычислителя и обновления одного или более параметров модели процесса с использованием градиентного спуска по функции потерь, которая кодирует ошибку имитационного моделирования при моделировании производственного и/или технического процесса.
6. Система по п. 4, в которой память (120) также выполнена с возможностью хранения: полностью или частично акаузальной модульной параметризованной модели управления, также называемой параметризованной моделью управления, для моделирования процесса управления, осуществляемого системой (15) управления, управляющей по меньшей мере частью производственного и/или технического процесса, включая один или более параметров управления параметризованной модели управления, причем полностью или частично акаузальная модульная параметризованная модель управления определена для взаимодействия с по меньшей мере частью полностью или частично акаузальной модульной параметризованной модели процесса для производственного и/или технического процесса, оптимизированного с помощью указанного по меньшей мере одного обновленного параметра модели процесса, причем процесс управления по меньшей мере частично смоделирован одной или более нейронными сетями, используемыми в качестве универсального аппроксиматора (универсальных аппроксиматоров) функций;
причем система дополнительно содержит:
- симулятор управления, выполненный с возможностью, посредством одного или более процессоров (110), имитационного моделирования процесса управления на основе полностью или частично акаузальной модульной параметризованной модели управления и соответствующей системы дифференциальных уравнений, и
- модуль цели управления, выполненный с возможностью, посредством одного или более процессоров (110), расчета цели управления, определяемой как функция цели управления состояний параметризованной модели управления, системы управления для управления производственным и/или техническим процессом;
- оцениватель управления при автоматическом дифференцировании в обратном режиме, выполненный с возможностью, посредством одного или более процессоров (110), оценки градиента цели управления по имитационному моделированию управления в отношении одного или более параметров управления с использованием автоматического дифференцирования в обратном режиме в отношении системы дифференциальных уравнений, имитационно моделирующих процесс управления; и
- оптимизатор управления, выполненный с возможностью, посредством одного или более процессоров (110), приема градиента из оценивателя управления при автоматическом дифференцировании в обратном режиме и одного или более параметров управления, а также обновления параметров управления на основе градиентного спуска или подъема и сохранения обновленных параметров управления в памяти (120).
7. Система по п. 6, дополнительно содержащая указанную систему (15) управления, выполненную с возможностью использования указанных параметров управления для управления производственным и/или техническим процессом.
8. Система (20; 30; 100), выполненная с возможностью расчета и/или адаптации по меньшей мере одной технической модели, относящейся к производственному и/или техническому процессу, подлежащему выполнению производственной и/или технической системой,
причем система (20; 30; 100) выполнена с возможностью получения указанной по меньшей мере одной технической модели, представляющей собой полностью или частично акаузальную модульную параметризованную модель процесса для производственного и/или технического процесса, также называемую параметризованной моделью процесса, включая один или более параметров модели процесса в полностью или частично акаузальной модульной параметризованной модели процесса, причем полностью или частично акаузальная модульная параметризованная модель процесса определена таким образом, чтобы производственный и/или технический процесс был по меньшей мере частично смоделирован одной или более нейронными сетями, используемыми в качестве универсального аппроксиматора (универсальных аппроксиматоров) функций;
причем система (20; 30; 100) выполнена с возможностью получения от датчиков технических данных, представляющих одно или более состояний производственного и/или технического процесса в один или более моментов времени,
причем система (20; 30; 100) выполнена с возможностью имитационного моделирования динамических характеристик одного или более состояний производственного и/или технического процесса во времени на основе полностью или частично акаузальной модульной параметризованной модели процесса и соответствующей системы дифференциальных уравнений, и
причем система (20; 30; 100) выполнена с возможностью применения автоматического дифференцирования в обратном режиме в отношении системы дифференциальных уравнений и генерирования оценки, представляющей собой расчет параметризованной модели процесса для производственного и/или технического процесса, при этом система (20; 30; 100) выполнена с возможностью генерирования расчетной оценки по меньшей мере частично на основе технических данных от датчиков,
причем система (20; 30; 100) выполнена с возможностью обновления по меньшей мере одного параметра модели процесса в полностью или частично акаузальной модульной параметризованной модели процесса для производственного и/или технического процесса на основе сгенерированной расчетной оценки и на основе процедуры градиентного спуска или подъема, а также с возможностью сохранения новых параметров в памяти, для использования при создании сигналов управления, управляющих работой производственного и/или технического процесса,
причем система (20; 30; 100) выполнена с возможностью генерирования оценки градиента, относящегося к одному или более имитационно-моделируемым состояниям в отношении по меньшей мере одной функции потерь, представляющей расхождение между i) основанным на модели имитационно-смоделированным производственным и/или техническим процессом и ii) реальным представлением производственного и/или технического процесса, по меньшей мере частично основанным на технических данных от датчиков.
9. Система по п. 8, в которой система (20; 30; 100) также выполнена с возможностью получения полностью или частично акаузальной модульной параметризованной модели управления, также называемой параметризованной моделью управления, для процесса управления, осуществляемого системой (15) управления, управляющей по меньшей мере частью производственного и/или технического процесса, включая один или более параметров управления для полностью или частично акаузальной модульной параметризованной модели управления, причем полностью или частично акаузальная модульная параметризованную модель управления определена для взаимодействия с по меньшей мере частью параметризованной модели процесса для производственного и/или технического процесса, оптимизированной посредством указанного по меньшей мере одного обновленного параметра модели управления, причем процесс управления по меньшей мере частично смоделирован одной или более нейронными сетями, используемыми в качестве универсального аппроксиматора (универсальных аппроксиматоров) функций;
причем система (20; 30; 100) выполнена с возможностью имитационного моделирования процесса управления, осуществляемого системой управления на основе полностью или частично акаузальной модульной параметризованной модели управления и соответствующей системы дифференциальных уравнений;
причем система (20; 30; 100) выполнена с возможностью применения автоматического дифференцирования в обратном режиме в отношении системы дифференциальных уравнений для генерирования расчетной оценки модели управления, и
причем система (20; 30; 100) выполнена с возможностью обновления по меньшей мере одного параметра управления полностью или частично акаузальной модульной параметризованной модели управления на основе расчетной оценки модели управления.
10. Система по п. 9, в которой система (20; 30; 100) выполнена с возможностью передачи по меньшей мере части параметров управления параметризованной модели управления в систему (15) управления для использования в качестве основания для управления производственным и/или техническим процессом.
11. Система по п. 8, в которой система (20; 30; 100) содержит схему (110) обработки и память (120), причем память (120) содержит инструкции, которые, при их исполнении схемой (110) обработки, обеспечивают выполнение схемой (110) обработки расчета и/или адаптации указанной по меньшей мере одной технической модели, относящейся к производственному и/или техническому процессу.
12. Система управления (15) для технической и/или производственной системы (10), причем система управления (15) включает в себя систему (20; 30; 100) по п. 8 и/или взаимодействует с ней.
13. Способ, осуществляемый одним или более процессорами, для расчета и/или адаптации по меньшей мере одной технической модели, относящейся к производственному и/или техническому процессу, осуществляемому производственной и/или технической системой, содержащий следующее:
- получают (S1) из памяти указанную по меньшей мере одну техническую модель, представляющую собой полностью или частично акаузальную модульную параметризованную моделью процесса для производственного и/или технического процесса, также называемую параметризованной моделью процесса, причем параметризованная модель процесса содержит по меньшей мере одну физическую подмодель и по меньшей мере одну нейронную сетевую подмодель, используемую в качестве универсального аппроксиматора функций для по меньшей мере частичного моделирования производственного и/или технического процесса, включая один или более параметров модели процесса в полностью или частично акаузальной модульной параметризованной модели процесса, а также технические данные от датчиков, поступающие из производственного и/или технического процесса;
- генерируют (S2) систему дифференциальных уравнений на основе полностью или частично акаузальной модульной параметризованной модели процесса;
- имитационно моделируют (S3) динамические характеристики одного или более состояний производственного и/или технического процесса во времени на основе системы дифференциальных уравнений; и
- применяют (S4) автоматическое дифференцирование в обратном режиме в отношении системы дифференциальных уравнений при имитационном моделировании производственного и/или технического процесса с целью генерирования оценки, представляющей собой расчет параметризованной модели процесса для производственного и/или технического процесса, причем оценку генерируют по меньшей мере частично на основе технических данных от датчиков, поступающих из производственного и/или технического процесса; и
- обновляют (S5) по меньшей мере один параметр модели процесса в полностью или частично акаузальной модульной параметризованной модели процесса для производственного и/или технического процесса на основе расчетной оценки с применением процедуры градиентного спуска или подъема для использования при создании сигналов управления, управляющих работой производственного и/или технического процесса,
причем шаг применения автоматического дифференцирования в обратном режиме для генерирования оценки содержит шаг генерирования оценки градиента по функции потерь, которая основана на имитационно-моделируемых состояниях с применением автоматического дифференцирования в обратном режиме.
14. Способ по п. 13, дополнительно содержащий следующее:
- принимают: полностью или частично акаузальную модульную параметризованную модель управления, также называемую параметризованной моделью управления, на основе по меньшей мере части параметризованной модели процесса для производственного и/или технического процесса, оптимизированного посредством указанного обновленного параметра модели, и параметризованной системы управления для производственного и/или технического процесса; функцию цели управления для состояний параметризованной модели управления, кодирующую цель управления для производственного и/или технического процесса; и параметры параметризованной модели управления;
- генерируют состояния параметризованной модели управления с использованием одного или более решателей дифференциальных уравнений;
- генерируют оценку градиента по функции цели управления в отношении параметров параметризованной модели управления с использованием автоматического дифференцирования в обратном режиме;
- обновляют один или более параметров параметризованной модели управления с использованием градиентного спуска или подъема по оценке градиента.
15. Способ по п. 13, причем способ применяют для адаптивного моделирования по меньшей мере части и/или управления по меньшей мере частью производственной и/или технической системы для по меньшей мере одной из таких отраслей, как промышленное производство, переработка и упаковка, автомобилестроение и транспорт, горнодобывающая промышленность, целлюлозно-бумажная промышленность, инфраструктура, энергетика и электроснабжение, телекоммуникации, информационные технологии, аудио/видео, науки о жизни, нефтяная отрасль, газовая отрасль, водоочистка, санитарная обработка и/или аэрокосмическая отрасль.
16. Долговременный компьютерно-читаемый носитель (120; 130), на котором хранится компьютерная программа (125; 135), содержащая инструкции, которые при их исполнении по меньшей мере одним процессором (110) обеспечивают выполнение по меньшей мере одним процессором (110):
получения полностью или частично акаузальной модульной параметризованной модели процесса для производственного и/или технического процесса, осуществляемой производственной и/или технической системой, также называемой параметризованной моделью процесса, при этом полностью или частично акаузальная модульная параметризованная модель процесса определена таким образом, чтобы производственный и/или технический процесс по меньшей мере частично был смоделирован одной или более нейронными сетями, используемыми в качестве универсального аппроксиматора (универсальных аппроксиматоров) функций, и технических данных от датчиков, поступающих из производственного и/или технического процесса;
имитационного моделирования динамических характеристик одного или более состояний производственного и/или технического процесса во времени на основе полностью или частично акаузальной модульной параметризованной модели процесса и соответствующей системы дифференциальных уравнений;
применения автоматического дифференцирования в обратном режиме в отношении системы дифференциальных уравнений для генерирования оценки, представляющей собой расчет параметризованной модели процесса для производственного и/или технического процесса, причем генерирование оценки по меньшей мере частично основано на технических данных от датчиков; и
обновления по меньшей мере одного параметра модели процесса в параметризованной модели процесса для производственного и/или технического процесса на основе сгенерированной расчетной оценки с применением процедуры градиентного спуска или подъема, для использования при создании сигналов управления, управляющих работой производственного и/или технического процесса,
причем указанное применение автоматического дифференцирования в обратном режиме для генерирования оценки содержит генерирование оценки градиента по функции потерь, которая основана на имитационно-моделируемых состояниях с применением автоматического дифференцирования в обратном режиме.
| PP Milan Eric, M Stefanovic, A Djordjevic, N Stefanovic, N Abadic "Production process parameter optimization with a new model based on a genetic algorithm and ABC classification method" ADVANCES IN MECHANICAL ENGINEERING 8 (8), 2016, стр | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| J Petersson, P Isaksson, H Tummescheit, J Ylikiiskilä ''Modeling and Simulation of a VerticalWind Power | |||

