Предложенное изобретение относится к устройствам для удаления загрязнений, а именно к роботу для удаления загрязнений.
Уровень техники
Из уровня техники, патент Китая №101574059, известна камера быстрой заморозки фекалий домашних животных, которая содержит корпус резервуара, ручку, горлышко бутылки, сетчатый мешок и насадку. При помощи данного устройства можно замораживать загрязнения, однако для его работы нужен человек и дополнительные устройства для хранения отходов. Предложенное изобретение позволяет автоматизировать данный процесс. Таким образом, проблема, решаемая изобретением, заключается в обеспечении возможности очистки поверхности автоматизированным средством без участия человека.
Технический результат - обеспечение возможности очистки поверхности автоматизированным средством без участия человека.
Технический результат достигается тем, что робот для удаления загрязнений, содержит корпус и выполнен с возможностью вмещать в себя по меньшей мере часть очищаемого изделия, а корпус имеет отверстие, соответствующее габаритам по меньшей мере части очищаемого изделия и полость для очищаемого изделия или его части, причем робот также содержит видеоподсистему, энергетическую подсистему, средства чистки, сенсорную систему, систему подачи и разбрызгивания хладагента, средство механического удаления загрязнения, по меньшей мере одно хранилище, модуль управления, причем видеоподсистема выполнена с возможностью определять наличие загрязнения, а система подачи и разбрызгивания хладагента выполнена с возможностью распылять хладагент на такое загрязнение для его заморозки, причем средство механического удаления загрязнения выполнено с возможностью перемещения замороженного загрязнения в хранилище, а средства чистки выполнены с возможностью очистки по меньшей мере части изделия, находящегося в полости корпуса, причем корпус робота содержит колеса для обеспечения его передвижения.
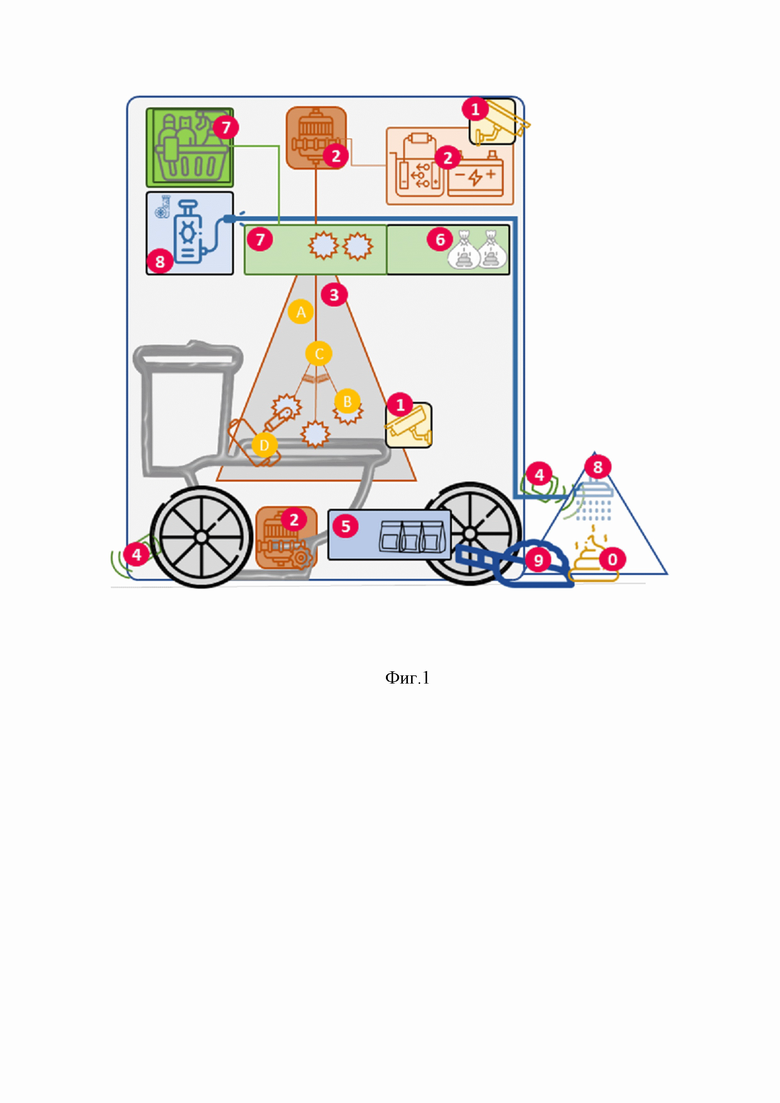
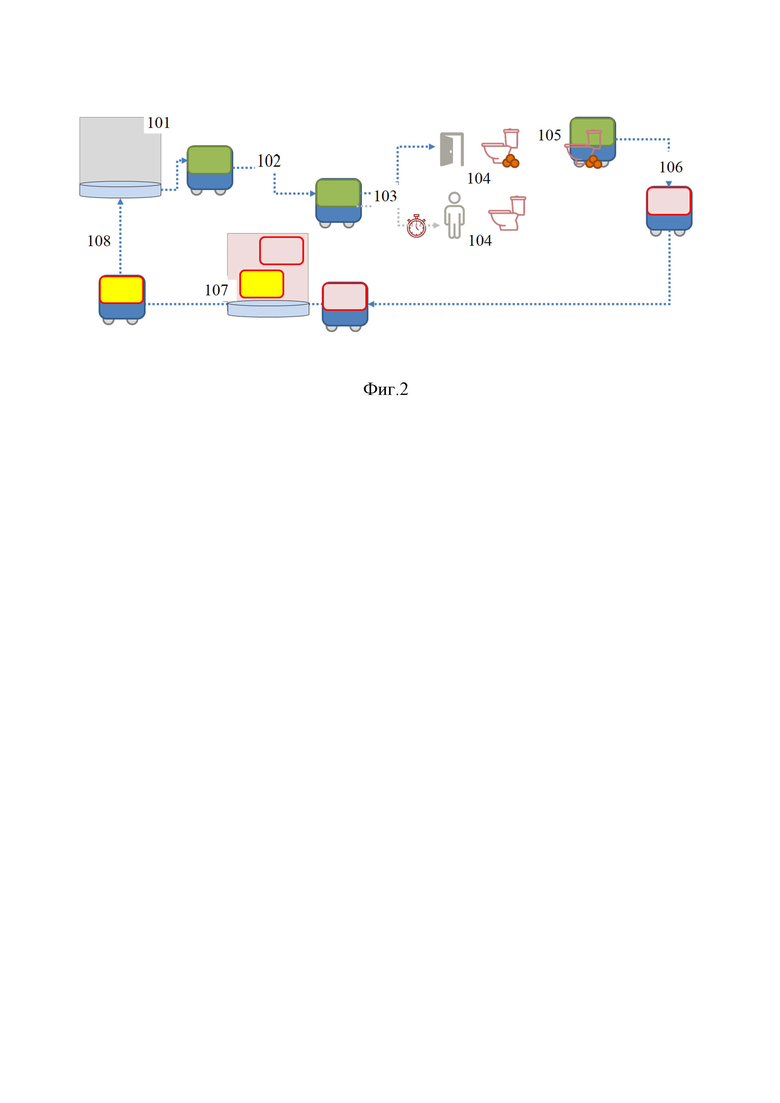
Сущность заявленного технического решения поясняется фиг. 1, 2, где
- на фиг. 1 схематично показана компоновка устройства;
- на фиг. 2 показан процесс работы робота для удаления загрязнений.
Осуществление изобретения
Корпус робота может быть выполнен из любого соответствующего материала, например, металла или пластика. Корпус может иметь форму прямоугольного параллелепипеда или любую другую форму. Корпус робота имеет в одной из своих стенок отверстие установленного размера для прохода через него унитаза или его части. Отверстие, например, может быть прямоугольным и начинаться с нижнего края боковой стенки и иметь размеры, соответствующие габаритам стандартного унитаза + 50 см. с каждой стороны. Внутри корпуса его элементы расположены так, чтобы унитаз или его часть разместились в образованной в корпусе полости для дальнейшей очистки. Корпус также содержит колеса, соединенные с мотором, для передвижения в пространстве. Робот также может содержать дополнительные устройства в виде контейнеров для загрязнения, специальных кассет для моющих средств. Также возможно наличие на корпусе механической ручки блокировки и транспортировки робота в случае неисправности робота.
Видеоподсистема 1 состоит из нескольких видеокамер, работающих в различных диапазонах. Видеоподсистема 1 предназначена для идентификации загрязнения внутри и снаружи унитаза. Видеоподсистема 1 (система компьютерного зрения) работает в нескольких диапазонах света. Такая система может состоять из нескольких видеокамер, минимум двух, со встроенным программным обеспечением, предназначенным для идентификации загрязнении. В частности, обычные загрязнения идентифицируются обычной видеокамерой, а загрязнения невидимые глазу идентифицируются видеокамерой работающей в ультрафиолетовом диапазоне. Видеоподсистема 1 является основным средством идентификации загрязнений и препятствий, при этом видеоподсистема 1 сравнивает текущие изображение полученное в режиме реального времени с эталонным изображением, не содержащем никаких загрязнений. Эталонное изображение может быть получено в момент первого прохода робота по маршруту.
Энергетическая подсистема 2 обеспечивает изделие электрической энергией и состоит из мотора, управляющего мотора, управляющего движением изделия и нескольких моторов управляющих средствами чистки 3. Энергетическая система 2 также может содержать аккумулятор или иной источник энергии. При этом в корпусе могут быть расположены средства для зарядки аккумулятора на базе.
Средства механической очистки 3 состоят из вала (C), раскрывающегося во время вращательного движения зонтичной структурой на спицах которой находятся щетки (B). При постепенном опускании вращающегося вала зонтичная структура раскрывается, проходя по внутренней поверхности унитаза. Зонтичная структура с щетками (B) вращается и чистит внутреннюю поверхность унитаза, поскольку спицы на валу (C) закреплены через пружинный механизм то внутренняя форма унитаза не имеет значения. Щётки, могут двигаться как по внутренней поверхности, так и по внешней поверхности унитаза и с подключёнными жидкими моющими средствами.
Работа с поверхностью унитаза может проводиться в трех направлениях:
1. Вертикальная очистка внутренний поверхности унитаза.
2. Горизонтальная очистка места расположения санитарного сиденья.
3. Вертикальная очистка внешней поверхности унитаза.
Для каждого из указанных направлений в изделии предусмотрены собственные средства очистки и диагностики загрязнений.
Так внутренняя поверхность унитаза очищается набором щеток со специальной конструкцией в виде букета который расширяется по мере движения сверху-вниз. Движения по очистке производятся в само унитазе до полной очистки внутренней поверхности унитаза. Горизонтальная поверхность очищается всегда. В момент парковки изделия на унитаз, когда изделие заезжает на унитаз, валики, находящиеся над верхней кромкой унитаза, прокатываются по грязной поверхности унитаза. Так же осуществляется очитка поверхности унитаза. При заезде изделия на унитаз ролики в унитазе будет очищать внешнюю поверхность. В нерабочем состоянии, щётки находятся в камере 7 наполнения химическими средствами очистки и наполняются чистящими средствами.
Для избегания загрязнения самого изделия операция очистки может осуществляться в специальном колпаке (A), который опускается на унитаз сверху.
Робот также содержит систему сенсоров 4, которые определяют расстояние до стены п препятствия, унитаза, загрязнения. Также сенсоры 4 позволяют более точно определить тип загрязнения. Сенсорная система 4 состоит из нескольких датчиков, включая датчики метана, углекислого газа, оксид углерода и др., предназначенная для достоверной идентификации загрязнения. Такая сенсорная система может состоять из датчиков и сенсоров двух видов, а именно датчиков пространственного позиционирования, сенсоров химического подтверждения. Датчики пространственного позиционирования: дальномер, гироскоп, акселерометр и др. (которые могут быть совмещены в одном физическом корпусе) предназначены точно позиционирования изделия в пространстве. При этом позиционирование выбирается так, чтобы идентифицированные загрязнения не повлияли на движение и работу изделия. Сенсоры химического подтверждения предназначены для химического анализа идентифицируемого загрязнения, т.е. подтверждает наличие загрязнения, полученного через систему компьютерного зрения, а также может определять тип загрязнения. Сенсоры размещены по периметру нижней части поверхности изделия для идентификации загрязнений со всех сторон изделия. Для подтверждения загрязнения на внешней части унитаза часть сенсоров размещена на внутренней поверхности изделия для идентификации загрязнений внутри унитаза. Сенсоры являются средством подтверждения наличия загрязнений полученного от видеоподсистемы 1.
Также сенсоры 4 необходимы для дозирования хладагента и служат для подтверждения забора загрязнений с поверхности. Все сенсоры подключены к системе микроконтроллеров обеспечивающих информационную обработку сигналов, поступивших от сенсоров. Полученные сигналы вместе с сигналами от видеоподсистемы 1 управляют механическими устройствами непосредственно осуществляющими уборку. В частности, открывается клапан для распыления хладагента для уборки внешней части унитаза и поверхности под ним. Распыление хладагента производится по интервалу, изделие самостоятельно включает и выключает сервопривод на выходящем шланге хладагента.
Робот также содержит модуль управления, который может содержать процессор или микроконтроллер и устройство памяти, в которой может располагаться база данных эталонных изображений, карты помещения, показания сенсоров химического подтверждения (например содержание сероводорода) при определенном типе загрязнения. Модуль управления получает сигналы (проводным или беспроводным способом) от остальных компонентов 1-9 робота, обрабатывает их, в том числе производя вычисления, и, при необходимости, направляет управляющие сигналы компонентам 1-9 робота.
Робот также содержит хранилище 5 чистых герметичных пакетов для найденных и предварительно замороженных наружных загрязнений и хранилище 6 заполненных герметических пакетов заполненных собранными, предварительно замороженными наружными загрязнениями.
Систему подачи и разбрызгивания хладагента 8, состоит из разбрызгивателя и подключённого баллона хладагента. Хладагент размещен в баллоне под давлением внутри изделия. На фронтальной части изделия размещены телескопические штанги, раскрывающиеся при обнаружении загрязнения видеоподсистемой 1 изделия. На указанных штангах закреплены шланги с электроклапанами для разбрызгивания хладагента из баллона. Поскольку хладагент находится в баллонах под давлением, то в случае открытия клапана хладагент самостоятельно, под действием внутреннего давления распыляется над загрязнением. После распыления хладагента, из нижней части изделия выдвигается средство механического удаления загрязнения, например, электроскребок 9 со шнеками, расположенными на рабочей поверхности электроскребка.
При обнаружении загрязнения электроскребок 9 загребает предварительно замороженные загрязнения в специальный контейнер находящийся внутри изделия. Замороженное загрязнение загребается скребком и по движущейся ленте поступает в чистый открытый герметичный пакет, размещенный на рейке, где после достижения определенной массы пакет запаковывается и размещается в хранилище герметичных пакетов. При достижении определенного веса, пакете за счет собственного веса зарывается и грязный пакет передается в хранилище. Сама конструкция имеет барабанный тип в котором пустые пакеты подвешены на вращающейся колонне с рейками на которых подвешены пустые пакеты. Заполненные пакеты размещаются в хранилище заполненных пакетов. В момент замены заполнения пакета на пустой загрузка прекращается до момента когда пустой пакет будет принимать загрязнения с совка конвейера. Контейнер герметичен и закрывается после наполнения. Впоследствии заполненный контейнер автоматический извлекается из корпуса изделия и заменяется на чистый и пустой контейнер.
Робот также может содержать ультрафиолетовую лампу для идентификации невидимых загрязнений и бортовую систему оповещения людей о статусе работы робота.
Робот работает следующим образом (фиг. 2).
101. Все операции выполняются в автоматическом режиме без участия человека. На начальном шаге санитарный робот находится на базе, где осуществляется зарядка батареи робота и установка в робота расходных материалов необходимых для очистки от загрязнений.
102. С определенной периодичностью, задаваемой в программе управления роботом, робот самостоятельно выходит на хорошо известный маршрут, содержащий исчерпывающую информацию о возможном месте засорения и нахождение унитаза. Кроме самого маршрута в памяти робота содержится информация о «достоверной чистоте», т. е. робот знает, как должно выглядеть чистое помещение и унитаз. Т. е то, что не соответствует картинке о чистоте, заложенной в память робота, является мусором и подлежит зачистке.
103. В случае появления препятствия по пути следования робот имеет возможность подождать или попробовать объехать препятствие, не отдаляясь от заданного маршрута. В случае обнаружения человека (используется инфракрасный датчик и компьютерное зрение) робот остается в режиме ожидания, не препятствуя человеку операцией чистки загрязнений.
104. После обнаружения загрязнений (сравнение идеальной картинки в памяти с обнаруженным загрязнением) и подтверждения отсутствия человека (инфракрасное видение), робот самостоятельно:
• очищает поверхность под и рядом с унитазом, чтобы иметь возможность подъехать к унитазу по чистой поверхности;
• после очистки околоунитазной поверхности, изделие подъезжает к унитазу, полностью накрывая его своим корпусом в котором размещены чистящие средства, это позволяет скрыть работы по очистке и не препятствовать распылению химических чистящих средств.
105. Вся чистка унитаза и поверхности унитаза скрыта внутри корпуса робота. В случае обнаружения загрязнений на полу, робот предварительно моет с загрязнениями используя для сбора загрязнений, в том числе жидких хладагент. Робот покрывает загрязнения из встроенного распылителя и затвердевшие загрязнения собирает с использованием щеток и вакуумных насосов, находящихся на нижней части робота. После очистки поверхности под унитазом робот продолжает чистку самого унитаза. Все загрязнения собираются в специальные непромокаемые, герметичные пакеты.
106. С заполненными контейнерами робот двигается по определённому маршруту к месту сброса загрязнений.
107. На месте сброса загрязнений робот самостоятельно скидывает герметичные контейнеры на место сброса загрязнений. Робот подъезжает к месту сброса и контейнер с загрязнениями в герметичных пакетах выталкиваете из корпуса робота, а на его место помещается другой контейнер с пустыми, чистыми, герметичными пакетами.
108. Робот с чистыми контейнерами и пакетами останавливается на базе для заряда батареи и пополнения запасов расходных материалов
| название | год | авторы | номер документа |
|---|---|---|---|
| ОЧИСТИТЕЛЬНАЯ МАШИНА | 2019 |
|
RU2735473C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ МЫТЬЯ ОБЩЕСТВЕННЫХ ТУАЛЕТОВ | 2021 |
|
RU2753287C1 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ WI-FI | 2023 |
|
RU2831101C1 |
| УСТРОЙСТВО И СПОСОБ ПОДГОТОВКИ В АНАЭРОБНЫХ УСЛОВИЯХ ДОНОРСКОЙ ФЕКАЛЬНОЙ МИКРОБИОТЫ К ТРАНСПЛАНТАЦИИ | 2020 |
|
RU2745125C1 |
| САМОХОДНАЯ АВТОМАТИЗИРОВАННАЯ МАШИНА-РОБОТ ДЛЯ УДАЛЕНИЯ ТРУДНОУДАЛЯЕМЫХ ЗАГРЯЗНЕНИЙ | 2018 |
|
RU2713698C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПРИГОТОВЛЕНИЯ НАПИТКОВ | 2012 |
|
RU2608299C2 |
| ПЕНОМОЮЩЕЕ СРЕДСТВО | 1991 |
|
RU2028837C1 |
| СПОСОБ ЧИСТКИ УНИТАЗА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2707916C1 |
| РОБОТИЗИРОВАННАЯ ОЧИСТКА ПОЛА С ПРИМЕНЕНИЕМ СТЕРИЛЬНОЙ ОДНОРАЗОВОЙ ПЛАТФОРМЫ | 2006 |
|
RU2434569C2 |
| Мобильный пункт ремонта боеприпасов | 2019 |
|
RU2700860C1 |
Предложенное изобретение относится к устройствам для удаления загрязнений, а именно к роботу для удаления загрязнений. Робот для удаления загрязнений содержит корпус и выполнен с возможностью вмещать в себя по меньшей мере часть очищаемого изделия, а корпус имеет отверстие, соответствующее габаритам по меньшей мере части очищаемого изделия, и полость для очищаемого изделия или его части. Робот также содержит видеоподсистему, энергетическую подсистему, средства чистки, сенсорную систему, систему подачи и разбрызгивания хладагента, средство механического удаления загрязнения, по меньшей мере одно хранилище, модуль управления. Видеоподсистема выполнена с возможностью определять наличие загрязнения, а система подачи и разбрызгивания хладагента выполнена с возможностью распылять хладагент на такое загрязнение для его заморозки. Средство механического удаления загрязнения выполнено с возможностью перемещения замороженного загрязнения в хранилище, а средства чистки выполнены с возможностью очистки по меньшей мере части изделия, находящегося в полости корпуса. Корпус робота содержит колеса для обеспечения его передвижения. Техническим результатом заявленного изобретения является обеспечение возможности очистки поверхности автоматизированным средством без участия человека. 4 з.п. ф-лы, 2 ил.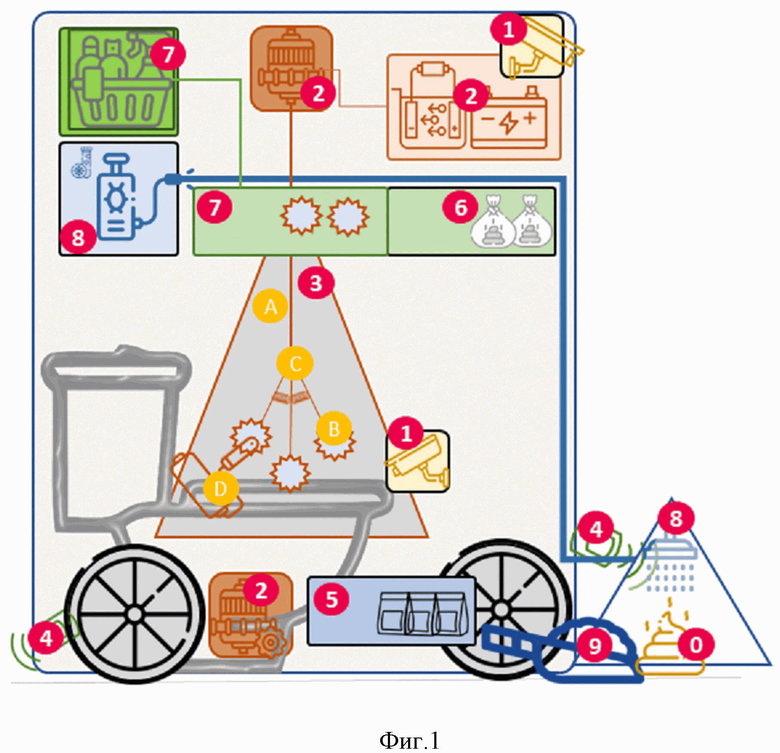
1. Робот для удаления загрязнений, содержащий корпус, характеризующийся тем, что выполнен с возможностью вмещать в себя по меньшей мере часть очищаемого изделия, а корпус имеет отверстие, соответствующее габаритам по меньшей мере части очищаемого изделия и полость для очищаемого изделия или его части, причем робот также содержит видеоподсистему, энергетическую подсистему, средства чистки, сенсорную систему, систему подачи и разбрызгивания хладагента, средство механического удаления загрязнения, по меньшей мере одно хранилище, модуль управления, причем видеоподсистема выполнена с возможностью определять наличие загрязнения, а система подачи и разбрызгивания хладагента выполнена с возможностью распылять хладагент на такое загрязнение для его заморозки, причем средство механического удаления загрязнения выполнено с возможностью перемещения замороженного загрязнения в хранилище, а средства чистки выполнены с возможностью очистки по меньшей мере части изделия, находящегося в полости корпуса, причем корпус робота содержит колеса для обеспечения его передвижения.
2. Робот для удаления загрязнений по п.1, отличающийся тем, что средства чистки включают в себя вал, выполненный с возможностью раскрываться во время вращательного движения зонтичной структурой, на спицах которой находятся щетки.
3. Робот для удаления загрязнений по пп.1, 2, отличающийся тем, что сенсорная система состоит из датчиков пространственного позиционирования и сенсоров химического подтверждения.
4. Робот для удаления загрязнений по п.3, отличающийся тем, что сенсоры химического подтверждения выполнены с возможностью подтверждения наличия загрязнения, определения его типа, а также выполнены с возможностью определения дозы хладагента для распыления и подтверждения удаления загрязнения.
5. Робот для удаления загрязнений по пп.1-4, отличающийся тем, что содержит хранилище чистых герметичных пакетов и хранилище герметичных пакетов, заполненных собранными, предварительно замороженными, загрязнениями.
| CN 219661628 U, 12.09.2023 | |||
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ МЫТЬЯ ОБЩЕСТВЕННЫХ ТУАЛЕТОВ | 2021 |
|
RU2753287C1 |
| CN 101574059 A, 11.11.2009 | |||
| CN 219048256 U, 23.05.2023 | |||
| CN 214511060 U, 29.10.2021 | |||
| WO 2019069313 A1, 11.04.2019 | |||
| CN 110664324 A, 10.01.2020. | |||
