Область техники
Предлагаемое изобретение относится к категории профессионального хозяйственного оборудования, предназначенного для очистки определенных участков территории от ненужных предметов или материалов, в частности, от остатков использованной жевательной резинки, остатков битума, клея, следов насекомых, а также других трудноудаляемых загрязнений.
Уровень техники
По всему миру, преимущественно в местах общего пользования, постоянно и неизбежно образуются трудноудаляемые загрязнения, к числу наиболее распространенных из них можно причислить прилипшие остатки использованной жевательной резинки и битумные пятна.
Особенно актуально решение данной проблемы в городской среде, поскольку неопрятный вид центральных площадей и улиц отрицательно влияет на имидж городов.
В настоящее время известны методы и устройства с помощью, которых возможно производить очистку от подобного вида загрязнений, однако, присущие им недостатки, о которых будет упомянуто далее, создали предпосылки к созданию новой более совершенной технологии борьбы с данными загрязнениями.
Так, из уровня техники известно самоходное уборочное транспортное средство для очистки песочных пляжей от загрязнения нефтепродуктами (см. US4157016, кл. Е01Н 1/00, публ. 1979 г. [1]).
Сущность известного решения [1] заключается в том, что уборочная машина перемещается по песчаному пляжу и распыляет жидкий азот на загрязненные нефтью поверхности, тем самым делая смешанные массивы масла и песка твердыми, что позволяет легко отделять их от чистого песка и эффективно удалять их с пляжа в специальные места для утилизации или переработки.
Уборочная машина представляет из себя крупнотоннажное вездеходное транспортное средство, оснащенное специальным оборудованием для обработки и сбора материалов, а также прицепом, в который указанный материал поступает.
Следует отметить то, что область рационального применения данной уборочной машины достаточно узкая, ограниченная очищением исключительно рыхлых поверхностей, поскольку рабочий орган машины в виде специального отвала и ее гусеничный привод неизбежно повредят другие виды загрязненных покрытий.
Также следует указать, что данная машина обладает внушительными габаритными размерами и большим весом, что сопряжено с низкой скоростью и маневренностью и высоким расходом горючего, понижая тем самым технико-эксплуатационные показатели.
Из уровня техники известен переносной портативный комплекс для чистки поверхностей с помощью жидкого азота (см. US6233949, кл. А01М 21/00, публ. 2001 г. [2]).
Известный комплекс содержит баллон с жидким азотом, приспособленный для ношения за спиной и соединенный с ним гибкой связью ручной штатив на одном конце, которого оборудован рычаг пользователя для управления впрыскиванием азота, а на другом распылитель-ограничитель в форме перевернутой чаши, предотвращающий утечку газа.
Данное устройство обладает достаточно простой и компактной конструкцией, при этом не лишенной недостатков.
Конструкция штатива не приспособлена для длительного пользования оператором, поскольку отдельно он не подвешивается на плечо или пояс пользователя, а держатели для рук расположены в концевой части штатива так, что затруднительно его перемещение, в том числе, и под наклоном к обрабатываемой поверхности без смены положения руки на одном из держателей.
Также следует обратить внимание на то, что данное устройство не предназначено для полного цикла очистки поверхности от трудноудаляемых загрязнений, поскольку конструктивно не предусматривает наличие функции (возможности) разрушения и последующего удаления, обработанных газом загрязнений, что потребует дополнительных необходимых для этого действий с привлечением подходящих подручных инструментов.
Таким образом, из недостатков известного решения [2] можно отметить затруднения при обработке поверхностей большой площади, возникающие, в том числе, из за низких эргономических показателей при использовании, а также низкую технологичность процесса чистки.
Из уровня техники известно полуавтоматическое устройство, предназначенное для удаления использованной жевательной резинки с различных поверхностей (см. CN206607540, кл. Е01Н 15/00, публ. 2017 г. [3]).
Данное устройство содержит тележку, на которой размещен бак с жидким азотом, оснащенный гибким соединением на конце, которого закреплен ручной дозатор азота с ограничителем в виде захвата круглого сечения, также имеется ручная щетка, соединенная гибкой электрической связью с упомянутой тележкой.
Поскольку все использующееся оборудование размещено на колесной тележке облегчается и упрощается процесс чистки поверхностей, а поскольку распылительное устройство и щетка выполнены для комфортного пользования одной рукой, то достигается высокая эргономичность в ходе эксплуатации.
При этом оборудование устройства позволяет реализовывать полный цикл уборки, начиная воздействием жидким азотом на загрязнение и заканчивая его удалением. Однако важно отметить, что удаление заключается только в измельчении обработанных участков загрязнений, т.е. фактически грязь все же остается и нуждается в полной ликвидации, что потребует проведения дополнительных действий. Таким образом, очевидно, что высокая эффективность при работе устройства достигается преимущественно при обработке вертикальных поверхностей, поскольку грязь при механической обработке щеткой попросту оседает на горизонтальных поверхностях.
Также из недостатков можно отметить невысокий уровень технологичности устройства, поскольку перемещение тележки, а также все действия по очистке проводятся в ручном режиме.
Наиболее близким аналогом предлагаемого изобретения является устройство очистки дорожного покрытия, известное из GB1480482, кл. Е01С 23/08, публ. 1977 г. [4]).
Известное устройство [4] предназначено для удаления ненужных предметов или материалов с поверхности дорожных покрытий, например, остатков битума, каучуковых и полимерных изделий и т.п.
Данное устройство очистки выполнено в самоходном исполнении в виде транспортного средства, на котором установлены двигатель, чистящее средство, оказывающее механическое разрушающее действие, собиратель отходов и емкость для хранения жидкого азота, соединенная с узлом его нанесения и распределения по поверхности.
Данное устройство является наиболее эффективным и технологичным из всех представленных выше, поскольку способно реализовывать полный цикл чистки, включая уборку, подверженного воздействию газом загрязнения и выполнено в самоходном исполнении, позволяющим последовательно воздействовать на попадающиеся по ходу движения загрязнения полностью ликвидируя их.
Из недостатков можно отметить, что данная машина не способна действовать избирательно, т.е. фактически подвергается обработке вся поверхность, через которую проходит машина, что связано, в частности, с неэффективным расходом жидкого азота, при этом сомнительна возможность эффективной подачи азота, а также регулировки и контроля вспомогательных чистящих систем в ручном режиме, поскольку невозможно "на глаз" безошибочно оценить требуемое количество подаваемого газа, нужный момент включения и скорость щетки, оптимальную скорость движения и др.
Таким образом, дополнительным недостатком устройства [4] можно считать узкую область полезного (эффективного) использования машины, ограниченную чисткой поверхностей не с локальными въевшимися загрязнениями, а со сплошными, требующими незамедлительного удаления.
Раскрытие изобретения
Технической проблемой (задачей) предлагаемого изобретения является создание высокотехнологичной самоходной чистящей машины, удаляющей въевшиеся трудноудаляемые загрязнения с какой-либо поверхности, в автоматическом режиме, предусматривающем выполнение полного цикла уборки, начиная от обнаружения указанных загрязнений и заканчивая их полной ликвидацией с поверхности, обеспечивая возможность их временного хранения с целью переработки для повторного применения в промышленности.
Техническим результатом предлагаемого изобретения, который объективно проявляется в ходе его эксплуатации, является повышение производительности и качества работы.
Заданный технический результат и указанная техническая проблема (задача) обеспечиваются в результате того, что автоматизированная самоходная чистящая машина содержит двигатель, чистящее средство, оказывающее механическое разрушающее действие, собиратель обработанных загрязнений и емкость для хранения жидкого азота, соединенная с узлом его нанесения и распределения по поверхности, при этом емкость для хранения жидкого азота выполнена в виде сосуда Дюара, а соединенный с ним узел его нанесения и распределения по поверхности выполнен в виде криодеструктора, подающего жидкий азот на определенный и ограниченный участок поверхности с загрязнением при помощи управляемой им подсистемы, состоящей из раздвижного рукава на конце, которого установлен позиционируемый рабочий элемент с боковой стенкой, предотвращающей утечку жидкого азота, чистящее средство, оказывающее по поступающему сигналу механическое разрушающее действие на обнаруженное и замороженное ранее загрязнение выполнено в виде игольчатого отбойника, приводимого в действие посредством компрессора, собиратель обработанных загрязнений выполнен в виде комплексной управляемой системы, состоящей из всасывающего устройства с улавливающей камерой, на входе которого установлена вращающаяся щетка, а на выходе сообщающийся с улавливающей камерой контейнер для временного хранения поступивших измельченных загрязнений, при этом машина снабжена фотодетекторами, идентифицирующими загрязнения посредством неоднородности поверхности, сведения о параметрах, которых поступают в информационно-аналитическую систему (ИАС), управляющего работой машины компьютера, выполненную с возможностью выработки и отправки, с учетом заблаговременно заложенных в нее данных о технических параметрах машины, оптимальных сигналов управления, активирующих, деактивирующих и контролирующих производственные процессы, касающиеся обнаружения загрязнения и его ликвидации с поверхности.
По одному из предпочтительных вариантов изготовления автоматизированная машина снабжена управляемой системой оросительного дезинфекционного воздействия обработанного участка поверхности, на котором ранее находилось загрязнение.
Указанная система оросительного дезинфекционного воздействия состоит, как правило, из диспенсера и распылительных форсунок, соединенных с емкостью дезинфицирующего раствора через узел его подачи.
Является наиболее целесообразным, если предлагаемая автоматизированная машина снабжена дополнительным набором фотодетекторов, служащих для контрольного анализа ранее освобожденного от загрязнения участка поверхности, с целью подачи соответствующих сигналов в ИАС, определяющей необходимость или отсутствие необходимости повторной обработки определенного участка поверхности.
По одному из лучших вариантов исполнения предлагаемой автоматизированной машины она содержит набор ультразвуковых датчиков для своего позиционирования относительно перепадов высот поверхности, движущихся и неподвижных препятствий, а также живых объектов.
Сведения о параметрах загрязнений, поступающие в информационно-аналитическую систему компьютера, как правило, содержат информацию о количестве загрязнений, вязкости загрязнений, твердости загрязнений, температуры загрязнений, площади и месторасположении загрязнений.
Данные о технических параметрах предлагаемой автоматизированной машины, которые заранее вносятся в информационно-аналитическую систему управляющего компьютера, как правило, включают сведения о габаритных размерах и размерах оборудования автоматизированной машины и расстояния между ним, весе машины, типе и мощности двигателя машины, трансмиссии машины, максимальной скорости машины, времени ускорения и торможения машины.
По одному из частных вариантов исполнения автоматизированной машина она снабжена подключенному к компьютеру монитору с устройством ввода информации с помощью, которого возможно управлять работой машины в ручном режиме.
Является предпочтительным, если на мониторе автоматизированной машины отображается уровень заряда аккумулятора, количество жидкого азота, время проведения чистки, состояние износа рабочих элементов и уровень заполнения контейнера для временного хранения измельченных загрязнений.
Согласно изобретательскому замыслу, предлагаемая автоматизированная самоходная чистящая система представляет из себя комплекс сложных взаимосвязанных между собой рабочих узлов, датчиков, модулей и аппаратных средств, размещенных на одном корпусе, передающих показания, функционирующих и управляемых с помощью программных средств компьютера, в состав, которого входит ИАС, которая хранит в энергонезависимой памяти, заранее заложенные в нее технические параметры определенной автоматизированной машины, и обладает возможностью приема и анализа, поступающих в нее внешних информационных сигналов, содержащих данные о параметрах обнаруженных загрязнений с целью выработки оптимальных сигналов управления (управляющих команд) для отправки их в блоки управления подчиненных систем и подсистем, осуществляющих криодеструкцию, измельчение, чистку и полное удаление обнаруженных загрязнений с поверхности.
Как правило, все части машины устанавливаются на корпусе или внутри корпуса, который имеет возможность перемещения с помощью движителя колесного или гусеничного типа.
Двигатель предлагаемой машины служит для преобразования энергии в механическую работу для осуществления движения машины.
Аппаратные и программные средства в предлагаемой машине представляют из себя компьютерную систему с энергонезависимой памятью и информационно-аналитическим центром (системой), программное обеспечение, которого управляет перемещением машины и процессами, связанными с обнаружением и удалением въевшихся загрязнений.
Набор фотодетекторов служит для идентификации загрязнений, определения их параметров, а ультразвуковые датчики служат для позиционирования машины относительно перепадов высот очищаемого покрытия, различных препятствий, а также живых объектов.
Система воздействия на загрязнение жидким азотом согласно конструкции представляет из себя емкость для хранения жидкого азота, которая соединена с узлом его нанесения и распределения по поверхности. При этом упомянутая емкость выполнена в виде сосуда Дюара, а соединенный с ним узел в виде криодеструктора, предназначенного для подачи жидкого азота на ограниченную площадь обрабатываемой поверхности с целью низкотемпературного воздействия на въевшееся трудноудаляемое загрязнение для его последующего разрушения. В состав криодеструктора входит управляемая подсистема, которая состоит из раздвижного рукава, на конце которого установлен позиционируемый рабочий элемент, контактирующий с поверхностью, конструкция, которого предотвращает утечку жидкого азота, тем самым его действие сосредотачивается на одном месте с высокой эффективностью.
Далее согласно изобретательскому замыслу по команде вступает в действие чистящее средство, которое оказывает механическое разрушающее воздействие на замороженный участок загрязнения. Чистящее средство выполнено в виде игольчатого отбойника, приводимого в действие с помощью пневматического или гидравлического компрессора.
Далее активируется собиратель обработанных ранее загрязнений, который выполнен в виде комплексной управляемой системы, состоящей из всасывающего устройства с улавливающей камерой, на входе которого установлена вращающаяся щетка, а на выходе сообщающийся с улавливающей камерой контейнер для временного хранения поступивших замороженных раздробленных загрязнений.
Далее, исходя из особенностей программного обеспечения или в зависимости от конфигурации машины, освободившееся от загрязнения место обрабатывается дезинфекционным раствором посредством управляемой системы оросительного дезинфекционного воздействия, после чего также исходя из особенностей программного обеспечения или в зависимости от конфигурации машины посредством дополнительного набора фотодетекторов осуществляется контроль качества чистки и отправка, в случае необходимости, определенного сигнала для повторной обработки загрязнения.
Как уже указано выше, корректность работы предлагаемой автоматизированной машины контролируется компьютерной системой, а конкретнее ИАС, программное обеспечение, которой позволяет управлять всем функционалом и возможностями производственных процессов, в частности, активацией и деактивацией процессов, последовательностью их включения, временем их работы и пр.
ИАС компьютера, получая сигнал с информацией о загрязнении от фотодетекторов, определяет их количество, точное месторасположение относительно машины, площадь, вязкость, твердость, а также другие параметры и особенности, и с учетом заранее заложенных в нее сведений о технических особенностях определенной машины, вырабатывает и направляет необходимые команды управления в управляющие блоки рабочих узлов машины.
Так, например, в блок управления двигателем могут поступать сигналы о требуемой скорости машины, направления ее движения, времени остановки для проведения необходимых процессов, месте остановки и др.
В блок управления системами криодеструктора поступают сигналы о требуемом количестве жидкого азота, времени его воздействия, позиционирования рабочего элемента в месте загрязнения и др.
В блок управления чистящего средства в виде игольчатого отбойника поступают сигналы о силе воздействия игл, времени воздействия игл, сигналы о выборочном включении игл, соответствующих площади и локализации загрязнения.
В блок управления собирателя загрязнений могут поступать сигналы о скорости и времени вращения щетки, мощности всасывания и др.
В блок управления системы оросительного дезинфекционного действия могут поступать сигналы о количестве подаваемого раствора и интенсивности его воздействия.
В исполнении машины с ультразвуковыми датчиками позиционирования, данные о приближающихся препятствиях или перепадах высот в процессе движения, поступают в информационно-аналитическую систему (ИАС) для формирования управляющих команд блоку управления двигателем.
Таким образом, предлагаемое выше конструктивное выполнение предлагаемой автоматизированной самоходной чистящей машины, с учетом ее технических особенностей, образует совокупность признаков достаточных для достижения технического результата, заключающегося в повышении производительности и качества работы и для решения актуальной технической проблемы создания высокотехнологичной машины, удаляющей въевшиеся загрязнения в автоматическом режиме, предусматривающем выполнения полного цикла уборки от обнаружения до полной ликвидации, предусматривая при этом возможность повторного использования собранных измельченных загрязнений.
Краткое описание чертежей
На фиг. 1 представлен пример загрязнения дорожного полотна, въевшимися остатками использованных жевательных резинок;
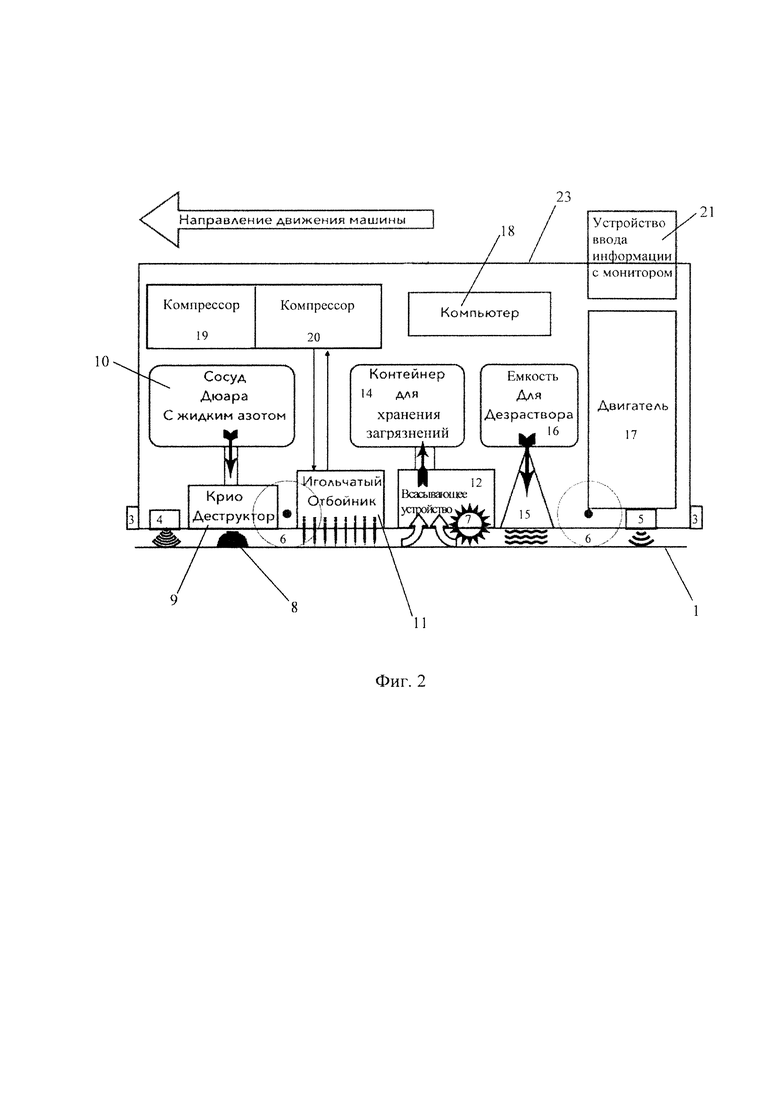
На фиг. 2 представлена схема компоновки предлагаемой машины;
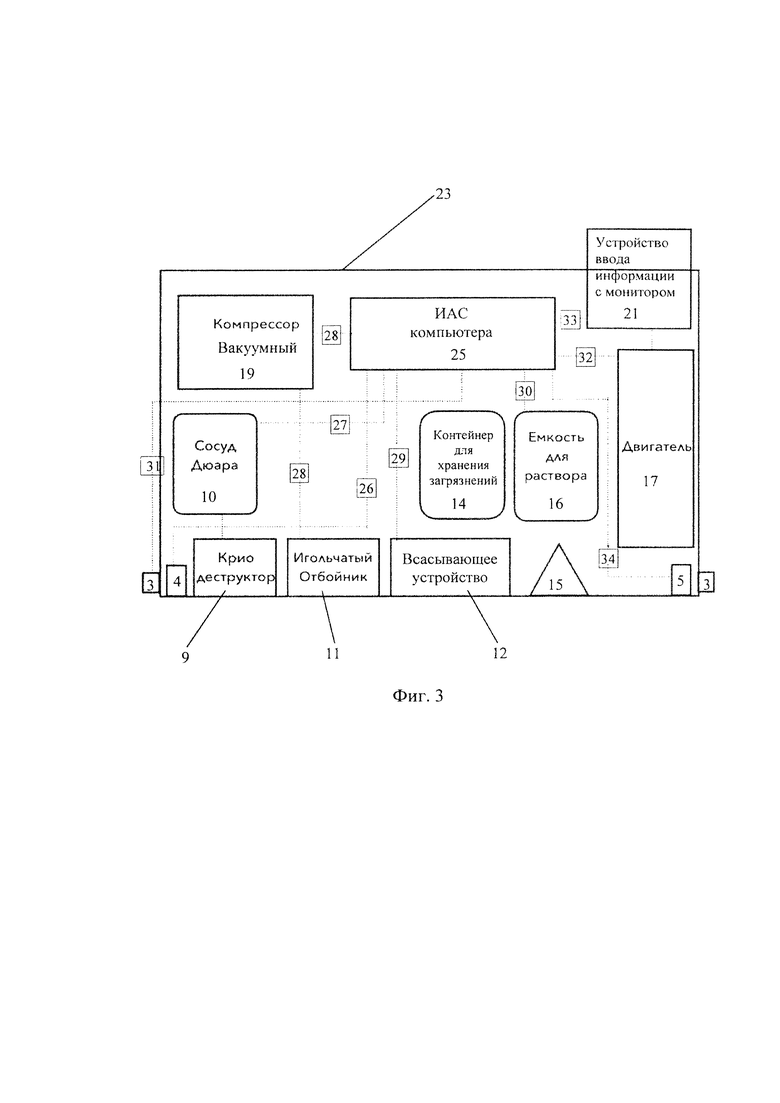
На фиг. 3 представлена блок-схема работы информационно-аналитической системы (ИАС);
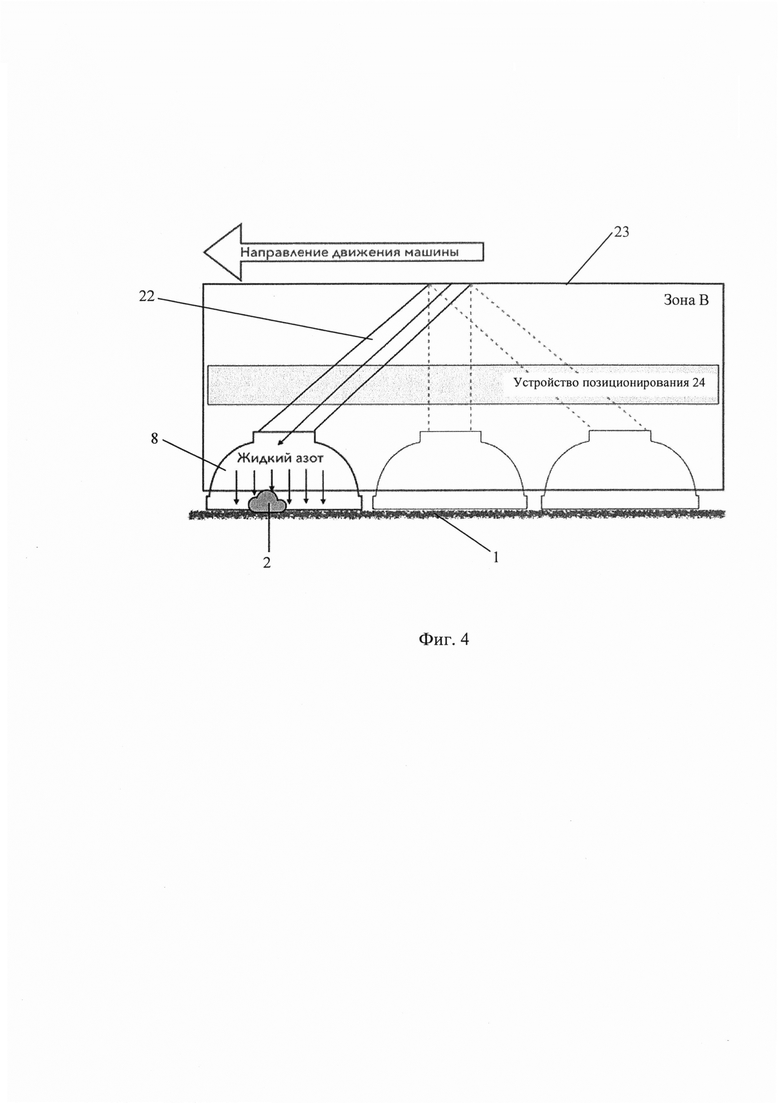
На фиг. 4 представлен вариант позиционной установки рабочего элемента криодеструктора на загрязненный участок обрабатываемой поверхности;
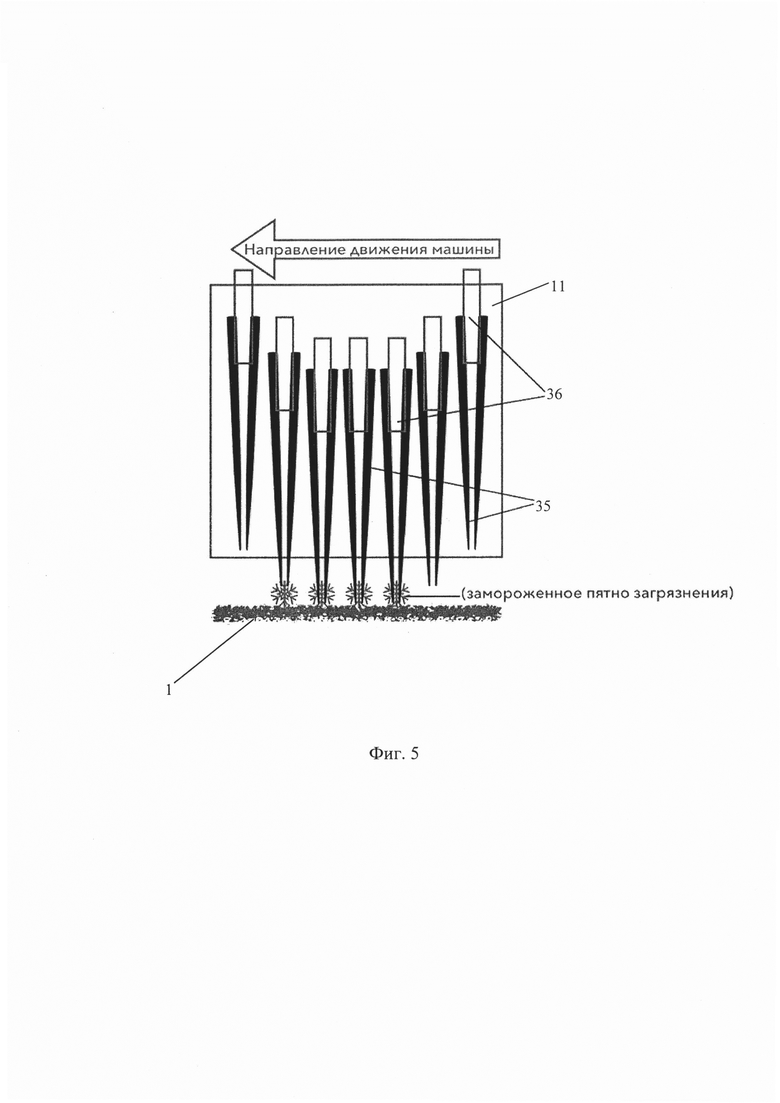
На фиг. 5 представлен вариант работы игольчатого отбойника;
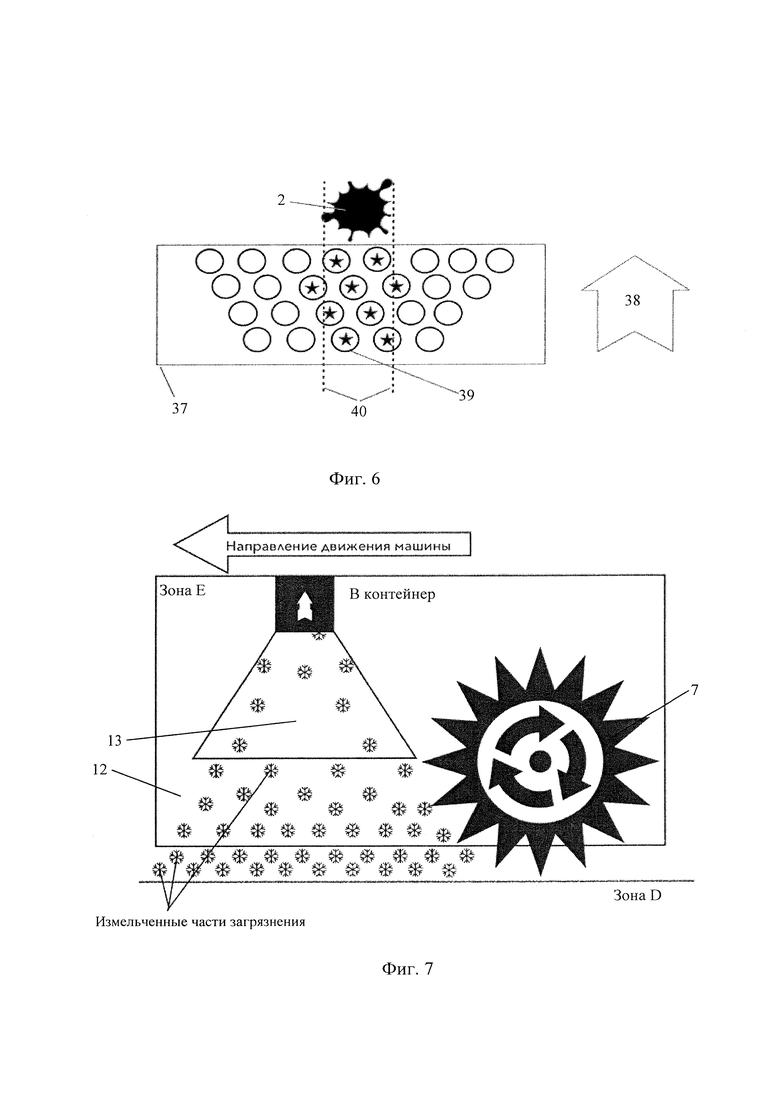
На фиг. 6 представлен графический пример избирательной работы игольчатого отбойника;
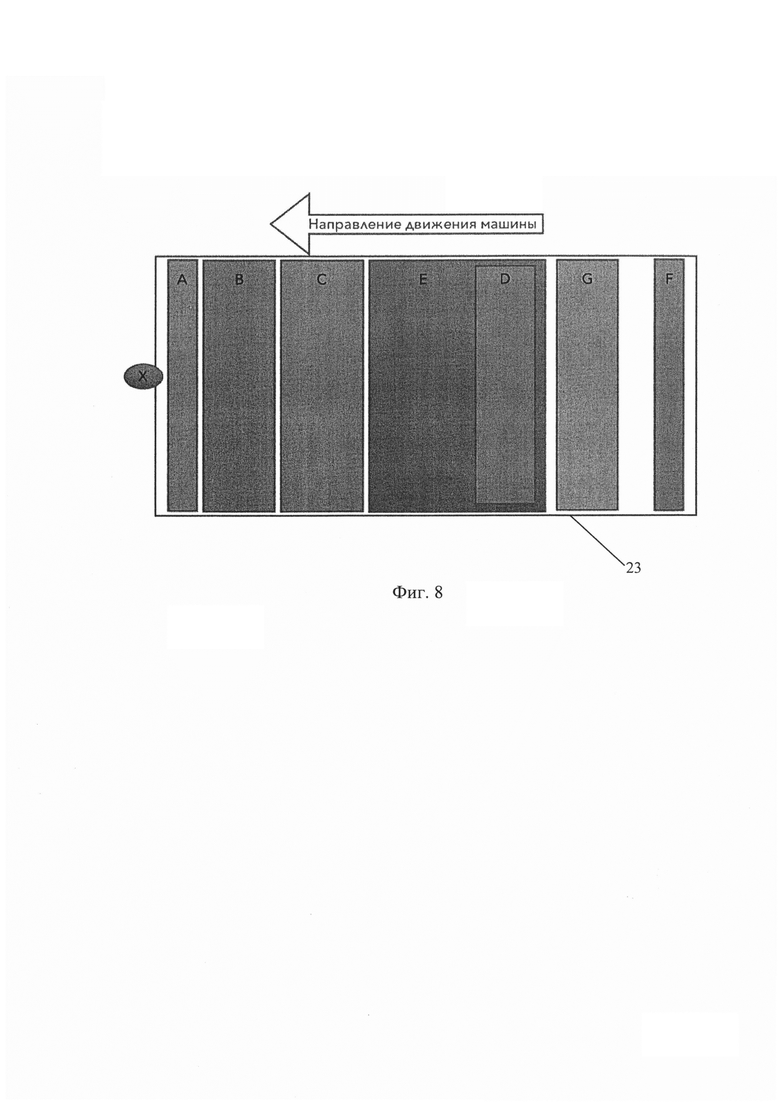
На фиг. 7 представлен вариант работы собирателя обработанных загрязнений;
На фиг. 8 схематично представлена предлагаемая машина с условным разделением на рабочие зоны;
Осуществление изобретения
Предлагаемое изобретение поясняется конкретным примером выполнения и реализации, которые, однако, не являются единственно возможными, но наглядным образом демонстрируют достижение указанной совокупностью существенных признаков технического результата, а также решение существующей технической проблемы.
На фиг. 1 - фиг. 7 обозначены следующие элементы предлагаемого изобретения, а также объекты, использующиеся при его реализации:
1 - обрабатываемая поверхность;
2 - засохшие остатки использованных жевательных резинок;
3 - ультразвуковые датчики препятствий;
4 - фотодетекторы;
5 - дополнительные фотодетекторы;
6 - колеса машины;
7 - вращающаяся щетка;
8 - рабочий элемент;
9 - криодеструктор;
10 - сосуд Дюара с жидким азотом;
11 - игольчатый отбойник;
12 - всасывающее устройство;
13 - улавливающая камера;
14 - контейнер для временного хранения загрязнений;
15 - система оросительного дезинфекционного воздействия;
16 - емкость для дезинфицирующего раствора;
17 - двигатель;
18 - компьютер;
19 - первый компрессор;
20 - второй компрессор;
21 - устройство ввода информации с монитором;
22 - раздвижной рукав;
23 - корпус машины;
24 - устройство позиционирования;
25 - ИАС (информационно-аналитическая система) компьютера;
26 - сигнал, поступающий от фото детектора 4 в ИАС 25;
27 - сигнал, поступающий из ИАС 25 в блок управления криодеструктора 9;
28 - сигнал, поступающий из ИАС 25 в блок управления игольчатого отбойника 11;
29 - сигнал, поступающий из ИАС 25 в блок управления собирателя обработанных загрязнений;
30 - сигнал, поступающий из ИАС 25 в блок управления системы оросительного дезинфекционного воздействия 15;
31 - сигнал, поступающий от ультразвуковых датчиков 3 в ИАС 25;
32 - сигнал, поступающий из ИАС 25 в блок управления двигателя 17;
33 - сигнал, поступающий из ИАС 25 на монитор устройства 21;
34 - сигнал, поступающий из дополнительного фотодетектора 5 в ИАС 25;
35 - иглы;
36 - плунжера игл;
37 - границы зоны механического воздействия;
38 - направление движения машины;
39 - задействованные в данном случае иглы;
40 - ширина зоны действия задействованных игл 39.
На фиг. 8 условно представлены, следующие обозначения:
X - загрязнение;
А - зона действия фотодетекторов 4;
В - зона криодеструкции;
С - зона работы игольчатого отбойника 11;
Е - зона работы собирателя обработанных загрязнений;
D - зона работы, вращающейся щетки 7;
G - зона действия дезинфекционной обработки;
F - зона действия дополнительных фото детекторов 5.
Следует отметить, что цель последующего описания предлагаемого изобретения заключается не в его ограничении конкретным исполнением, а наоборот в охвате всевозможных дополнений, не выходящих за рамки представленной формулы изобретения.
В соответствии с предложенным изобретательским замыслом предлагаемая автоматизированная самоходная чистящая машина содержит корпус 23, двигатель 17, чистящее средство, оказывающее механическое разрушающее действие, собиратель обработанных загрязнений и емкость для хранения жидкого азота, которая соединена с узлом его нанесения и распределения по поверхности.
Емкость для хранения жидкого азота выполнена в виде сосуда Дюара 10 с жидким азотом, а соединенный с ним узел его нанесения и распределения по поверхности выполнен в виде криодеструктора 9.
Криодеструктор 9 подает жидкий азот на определенный и ограниченный участок поверхности с загрязнением посредством управляемой им подсистемы, состоящей из раздвижного рукава 22 на конце, которого установлен позиционируемый рабочий элемент 8 с боковой стенкой, предотвращающей утечку жидкого азота.
Позиционируемый рабочий элемент 8, как правило, выполняется в виде чашеобразной насадки, плотно прижимаемой к поверхности и не допускающей утечку жидкого азота.
Также рабочий элемент 8 может быть выполнен в виде колпачка или патрубка, также плотно прижимаемых к поверхности.
Чистящее средство, оказывающее по поступающему сигналу в соответствующий блок управления, механическое разрушающее действие на обнаруженное и замороженное ранее загрязнение выполнено в виде игольчатого отбойника 11, приводимого в действие посредством первого пневматического или гидравлического компрессора 19.
Собиратель обработанных загрязнений выполнен в виде комплексной управляемой системы, состоящей из всасывающего устройства 12 с улавливающей камерой 13.
На входе всасывающего устройства 12 установлена вращающаяся щетка 7, а на выходе, сообщающийся с улавливающей камерой 13 контейнер 14 для временного хранения поступивших измельченных загрязнений.
Предлагаемая машина снабжена фотодетекторами 4, идентифицирующими загрязнения посредством неоднородности поверхности, сведения о параметрах, которых поступают в ИАС 25, управляющего работой машины компьютера 18.
ИАС 25 с помощью программного обеспечения обрабатывает получаемые сигналы и с учетом заблаговременно заложенных в нее данных о технических параметрах машины вырабатывает оптимальные сигналы управления (команды управления), которые способны активировать, деактивировать и контролировать производственные процессы, касающиеся обнаружения загрязнений и их ликвидации с поверхности.
Также машина снабжена управляемой системой оросительного дезинфекционного воздействия 15 для обработки участков поверхности, на которых ранее находились загрязнения. Указанная система оросительного дезинфекционного воздействия 15 состоит из диспенсера и распылительных форсунок, соединенных с емкостью 16 дезинфицирующего раствора.
Машина снабжена дополнительным набором фото детекторов 5, служащих для контрольного анализа ранее освобожденного от загрязнения участка поверхности с целью подачи определенных сигналов в ИАС 25, определяющей необходимость или отсутствие необходимости повторной обработки определенного участка поверхности.
Предлагаемая машина содержит набор ультразвуковых датчиков препятствий 3 для безопасного перемещения, исключая повреждения машины, препятствий и живых объектов.
Предлагаемая машина также снабжена, подключенному к компьютеру 18 устройством ввода информации с монитором 21, с помощью которого можно при необходимости управлять работой машины в ручном режиме.
Работает предлагаемая автоматизированная чистящая машина, следующим образом.
Цикл обработки трудноудаляемых въевшихся загрязнений с поверхности состоит из нескольких этапов, которым соответствуют условные последовательно расположенные зоны обработки A-F (фиг. 8).
Двигаясь произвольно вперед по обрабатываемой поверхности, машина своей передней частью "наезжает" на загрязнение X (фиг. 8), попадая в область действия зоны А (фиг. 8), где происходит его фоторегистрация с помощью фотодетекторов 4 (фиг. 2).
Сигнал 26 (фиг. 3) о наличии загрязнения X на обрабатываемой поверхности 1 по системе связи поступает в ИАС 25, которая воспринимает его как триггерный механизм к началу работы всего цикла обработки загрязнения X.
Запускается цикл обработки загрязнения X.
В начале в ИАС 25, куда приходит информация от фото детекторов 4 происходит анализ загрязнения на предмет определения его площади, степени загрязнения, вязкости, твердости и точного месторасположения относительно машины.
На основании данных о параметрах загрязнения X ИАС 25 с учетом заранее заложенных в нее данных о характеристиках машины вырабатывает оптимальные сигналы управления см. фиг. 3 для осуществления производственных процессов, распределенных по условным зонам обработок (Зоны A-F, фиг. 8).
Все сигналы управления (фиг. 3) вырабатываемые ИАС 25 дополнительно прорабатываются в ней и сопоставляются между собой для проверки "конфликтующих" команд с целью исключения сбоев в работе машины.
Изначально ИАС 25 подает сигнал 32 (фиг. 3) в блок управления двигателя 17, содержащий сведения о выборе траектории движения, скорости движения, времени и возможном количестве остановок для проведения всех этапов обработки, которым соответствуют условные зоны A-F (фиг. 8).
Затем ИАС 25 подает сигнал 27 в блок управления криодеструктора 9 (фиг. 3) и начинается этап обработки, соответствующей зоне В (фиг. 4, фиг. 8).
На данном этапе происходит позиционирование рабочего элемента 8 на загрязнение X (в данном примере в качестве загрязнения X выступает засохший остаток, использованной жевательной резинки 2), в результате чего в данной зоне В происходит криодеструкция загрязнения X.
Машина медленно перемещается вперед и в определенное время в определенном месте посредством устройства позиционирования 24 на загрязнение, в виде засохшего остатка, использованной жевательной резинки 2 опускается рабочий элемент 8 и подается жидкий азот (фиг. 4). В процессе криодеструкции, рабочий элемент 8 постоянно находится в неподвижном состоянии относительно загрязнения, в то время как машина продолжает движение, это необходимо для качественной заморозки засохшего остатка, использованной жевательной резинки 2 по всему объему. В соответствии с сигналом 27 подается определенное дозированное количество жидкого азота непосредственно в рабочий элемент 8 через раздвижной рукав 22.
Конструкция рабочего элемента 8 выполнена так, что обеспечивается плотное прилегание к поверхности, а боковая стенка препятствует утечке азота.
В конструкции машины позиционируемых рабочих элементов 8 может быть несколько, что обеспечивает возможность перекрытия всей площади зоны В (фиг. 8), что повышает эффективность обработки.
Как правило, требуется несколько секунд для того, чтобы произвести качественную криодеструкцию - время достаточное для того, чтобы рабочий элемент 8 переместился от начала зоны В в ее конец (фиг. 4) при помощи устройства позиционирования 24.
После завершения этапа криодеструкции (зона В) рабочий элемент 8 автоматически поднимается и переводится в изначальную позицию (переднюю часть зоны В) также при помощи устройства позиционирования 24.
Машина продолжает движение и в это время загрязнение в виде засохшего остатка использованной жевательной резинки 2, подвергшееся криодеструкции попадает в зону С (фиг. 8), а именно в зону механической обработки игольчатого отбойника 11.
По сигналу 28 (фиг. 3), поступающему от ИАС 25 включается подача сжатого воздуха посредством первого вакуумного компрессора 19 на игольчатый отбойник 11 в соответствии с площадью и локализацией загрязнения, находящегося в зоне С (фиг. 5). Иглы 35 игольчатого отбойника 11 производят механическое воздействие на замороженное загрязнение по мере его нахождения в зоне С.
Иглы 39 могут быть задействованы избирательно и зависит это от размеров загрязнения (см. фиг. 6)
Задачей игольчатого отбойника 11 является измельчение и отделение от очищаемой поверхности замороженного загрязнения.
Далее, по мере продвижения машины, обработанное загрязнение попадает в виде раздробленных замороженных частиц в зону обработки D (фиг 7, фиг. 8), где по сигналу 29, поступающему от ИАС 25 в блок управления собирателя обработанных загрязнений, включается, вращающаяся щетка 7, которая оказывая дополнительное механическое воздействие на замороженное и разрушенное криодеструктором 9, а также обработанное игольчатым отбойником загрязнение, собирает измельченные частицы, направляя их в улавливающую камеру 13 всасывающего устройства 12, как бы подметая их (фиг. 7).
Также вакуумной обработке всасывающим устройством 12 (зона Е, фиг. 8) подвергаются все свободно лежащие замороженные частицы загрязнения, так и те, которые дополнительно подает вращающаяся щетка 7.
Все замороженные загрязнения, проходящие через улавливающую камеру 13 всасывающего устройства 12, впоследствии направляются в контейнер 14 для временного хранения загрязнений (фиг. 2).
Далее освобожденный от загрязнения участок поверхности по мере продвижения машины попадает в зону G (фиг. 8), т.е. на этап дополнительной обработки дезинфицирующим раствором, где происходит его дезинфицирующая обработка, осуществляющаяся посредством поступления от ИАС 25 сигнала 30 (фиг. 3) в блок управления системы оросительного дезинфекционного воздействия 15, что активирует через распылительные форсунки подачу раствора, смывая остатки обработанных раздробленных загрязнений с поверхности.
Затем освобожденный от загрязнения участок поверхности по мере движения машины попадает в зону F (фиг. 8), т.е. на этап работы дополнительных фотодетекторов, отвечающих за направление информации в ИАС 25 о контроле качества очистки поверхности дорожного покрытия. По системе связи сигнал 34 поступает в ИАС 25, где происходит его обработка и в случае недостаточно качественной обработки подается сигнал о необходимости повторного проведения всего цикла обработки в соответствии с зонами A-F (фиг. 8).
Во время работы ИАС 25 на мониторе машины отображается основная информация, касающаяся процессов чистки и в случае необходимости оператор машины посредством устройства ввода информации 21 может в любой момент остановить работу машины или управлять необходимыми этапами работы в ручном режиме.
В результате применения предлагаемой автоматизированной самоходной чистящей машины повышаются производительность и качество работы.
Предлагаемое изобретение может быть успешно использовано для удаления въевшихся трудноудаляемых загрязнений, например, прилипших к поверхности дорожных покрытий остатков использованных жевательных резинок, с возможностью их временного хранения для переработки с целью повторного применения в промышленности.
Изобретение относится к категории профессионального хозяйственного оборудования, предназначенного для очистки участков территории от ненужных предметов или материалов. Автоматизированная самоходная чистящая машина содержит двигатель, чистящее средство, оказывающее механическое разрушающее действие, собиратель обработанных загрязнений и емкость для хранения жидкого азота, соединенную с узлом его нанесения и распределения по поверхности. Емкость для хранения жидкого азота выполнена в виде сосуда Дюара, а соединенный с ним узел его нанесения и распределения по поверхности выполнен в виде криодеструктора, подающего жидкий азот на определенный и ограниченный участок поверхности с загрязнением при помощи управляемой им подсистемы, состоящей из раздвижного рукава, на конце которого установлен позиционируемый рабочий элемент с боковой стенкой, предотвращающей утечку жидкого азота. Чистящее средство, оказывающее по поступающему сигналу механическое разрушающее действие на обнаруженное и замороженное ранее загрязнение, выполнено в виде игольчатого отбойника, приводимого в действие посредством компрессора. Собиратель обработанных загрязнений выполнен в виде комплексной управляемой системы, состоящей из всасывающего устройства с улавливающей камерой, на входе которого установлена вращающаяся щетка, а на выходе сообщающийся с улавливающей камерой контейнер для временного хранения поступивших измельченных загрязнений. Машина снабжена фотодетекторами, идентифицирующими загрязнения посредством неоднородности поверхности, сведения о параметрах которых поступают в информационно-аналитическую систему управляющего работой машины компьютера, выполненную с возможностью выработки и отправки, с учетом заблаговременно заложенных в нее данных о технических параметрах машины, оптимальных сигналов управления, активирующих, деактивирующих и контролирующих производственные процессы, касающиеся обнаружения загрязнения и его ликвидации с поверхности. Изобретение обеспечивает повышение производительности и качества работы. 8 з.п. ф-лы, 8 ил.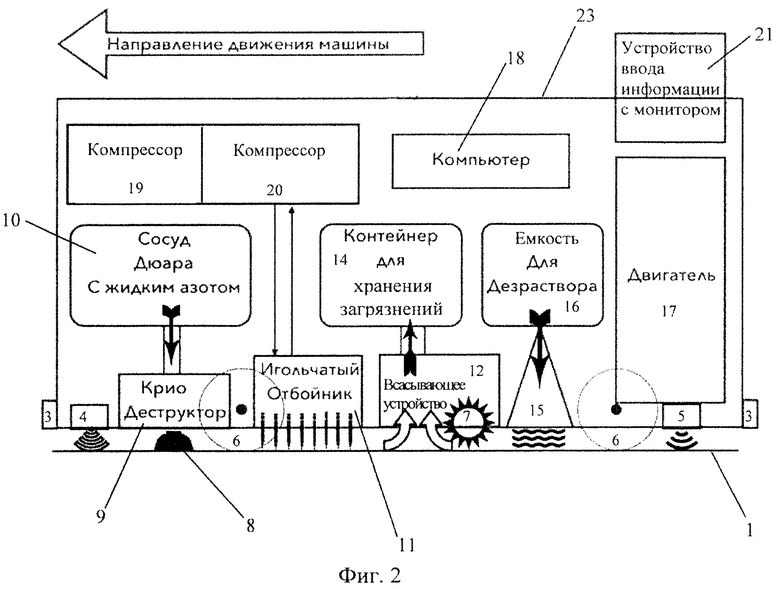
1. Автоматизированная самоходная чистящая машина, содержащая двигатель, чистящее средство, оказывающее механическое разрушающее действие, собиратель обработанных загрязнений и емкость для хранения жидкого азота, соединенную с узлом его нанесения и распределения по поверхности, отличающаяся тем, что емкость для хранения жидкого азота выполнена в виде сосуда Дюара, а соединенный с ним узел его нанесения и распределения по поверхности выполнен в виде криодеструктора, подающего жидкий азот на определенный и ограниченный участок поверхности с загрязнением при помощи управляемой им подсистемы, состоящей из раздвижного рукава, на конце которого установлен позиционируемый рабочий элемент с боковой стенкой, предотвращающей утечку жидкого азота, чистящее средство, оказывающее по поступающему сигналу механическое разрушающее действие на обнаруженное и замороженное ранее загрязнение, выполнено в виде игольчатого отбойника, приводимого в действие посредством компрессора, собиратель обработанных загрязнений выполнен в виде комплексной управляемой системы, состоящей из всасывающего устройства с улавливающей камерой, на входе которого установлена вращающаяся щетка, а на выходе -сообщающийся с улавливающей камерой контейнер для временного хранения поступивших измельченных загрязнений, при этом машина снабжена фотодетекторами, идентифицирующими загрязнения посредством неоднородности поверхности, сведения о параметрах которых поступают в информационно-аналитическую систему управляющего работой машины компьютера, выполненную с возможностью выработки и отправки, с учетом заблаговременно заложенных в нее данных о технических параметрах машины, оптимальных сигналов управления, активирующих, деактивирующих и контролирующих производственные процессы, касающиеся обнаружения загрязнения и его ликвидации с поверхности.
2. Автоматизированная машина по п. 1, отличающаяся тем, что снабжена управляемой системой оросительного дезинфекционного воздействия обработанного участка поверхности, на котором ранее находилось загрязнение.
3. Автоматизированная машина по п. 2, отличающаяся тем, что указанная система состоит из диспенсера и распылительных форсунок, соединенных с емкостью дезинфицирующего раствора через узел его подачи.
4. Автоматизированная машина по п. 1, отличающаяся тем, что снабжена дополнительным набором фотодетекторов, служащих для контрольного анализа ранее освобожденного от загрязнения участка поверхности, с целью подачи соответствующих сигналов в информационно-аналитическую систему, определяющую необходимость или отсутствие необходимости повторной обработки определенного участка поверхности.
5. Автоматизированная машина по п. 1, отличающаяся тем, что содержит набор ультразвуковых датчиков для позиционирования машины относительно перепадов высот поверхности, движущихся и неподвижных препятствий, а также живых объектов.
6. Автоматизированная машина по п. 1, отличающаяся тем, что сведения о параметрах загрязнений содержат информацию об их количестве, вязкости, твердости, температуре, площади и точном месторасположении относительно машины.
7. Автоматизированная машина по п. 1, отличающаяся тем, что данные о технических параметрах машины включают сведения о ее габаритных размерах и размерах оборудования и расстояния между ним, весе, типе и мощности двигателя, трансмиссии, максимальной скорости, времени ускорения и торможения.
8. Автоматизированная машина по п. 1, отличающаяся тем, что снабжена подключенным к компьютеру монитором с устройством ввода информации, с помощью которого возможно управлять работой машины в ручном режиме.
9. Автоматизированная машина по п. 1, отличающаяся тем, что на мониторе отображается уровень заряда аккумулятора, количество жидкого азота, время проведения чистки, состояние износа рабочих элементов и уровень заполнения контейнера для временного хранения измельченных загрязнений.
| GB 1480482 A, 20.07.1977 | |||
| EP 1991369 B1, 07.09.2011 | |||
| CN 104179147 A, 03.12.2014 | |||
| JP 11043914 A, 16.02.1999 | |||
| УСТРОЙСТВО для МЕХАНИЗИРОВАННОГО БУРЕНИЯ ОТВЕРСТИЙ В ГРУНТЕ | 0 |
|
SU179240A1 |

