Область техники, к которой относится изобретение
Изобретение относится к строительству, в частности к складному башенному крану и способу вертикального перемещения стрелы.
Уровень техники
При высотном строительстве большая часть подъёмно-транспортных работ производится с использованием башенных кранов. Башенные краны применяются для перемещения грузов на высоту на стройке и масштабных складских комплексах. В попытках добиться наибольшей эффективности от башенного крана разработчиками по всему миру ведется непрерывный поиск оптимальных конструкций для решения различных задач. Одним из направлений работ является ускорение всех стадий процесса строительства, для чего необходим кран, который можно было бы быстро транспортировать, собирать и разбирать. Еще одно направление фокусируется на повышении автоматизации путем создания строительного робота, который мог бы самостоятельно или с минимальным участием оператора возводить высотные сооружения – например, с помощью подвешенного на стреле узла автоматизации, такого как манипулятор для установки строительных блоков или печатающая головка для трехмерной печати. Авторы настоящего изобретения попытались совместить вышеозначенные направления, чтобы создать кран, который сочетал бы в себе автоматизацию как с точки зрения монтажа и транспортировки, так и непосредственной эксплуатации. Тем не менее, при разработке выяснилось, что в уровне техники отсутствуют подобные готовые решения.
В частности, известны складывающиеся башенные краны (например, CN 101962156 B), но в их конструкциях стрела зафиксирована на башне, и в зависимости от выбранных размеров либо получается габаритный кран с высоко установленной стрелой, из-за чего подвешенный на стреле узел автоматизации в нижних своих положениях подвергается сильному раскачиванию, что приводит к снижению точности его работы вплоть до невозможности его использования, либо наоборот, получается небольшой кран с относительно невысоко установленной стрелой, возможностей которого не хватает для многоэтажного строительства.
Одним из решений данной проблемы является обеспечение подвижности стрелы в вертикальном направлении, за счет чего можно было бы перемещать узел автоматизации вместе со стрелой и увеличить тем самым жесткость конструкции и точность работы узла автоматизации.
Известны башенные краны с перемещающейся по вертикали стрелой (например, SU 1230972 A1, SU 179445 A1), но они не обладают возможностью автоматического складывания.
Соответственно, в уровне техники сформировалась потребность в создании автоматически складывающегося башенного крана с автоматически перемещающейся по вертикали стрелой.
Сущность изобретения
Настоящее изобретение направлено на создание устройств для автоматизированного возведения конструкций, в том числе строительства зданий, позволяющих устранить по меньшей мере некоторые из указанных выше недостатков предшествующего уровня техники.
В частности, в первом аспекте настоящего изобретения предложен складной башенный кран с перемещающейся по вертикали стрелой, содержащий:
платформу с башней;
обойму, установленную на башне с возможностью вертикального перемещения вдоль нее;
складную вантовую систему, присоединенную к обойме;
стрелу, одним концом присоединенную к обойме с возможностью складывания относительно нее, причем стрела подвешена на вантовой системе;
систему удержания вантовой системы, содержащую первый привод, расположенный на платформе, и первый канат, который соединяет первый привод с вантовой системой;
канатно-блочную систему перемещения стрелы, содержащую второй привод, расположенный на платформе, второй канат и по меньшей мере один блок, причем второй канат соединяет второй привод с обоймой через упомянутый по меньшей мере один блок, расположенный на оголовке башни, причем обойма подвешена на оголовке башни с помощью упомянутого по меньшей мере одного блока; и
модуль управления, выполненный с возможностью управления первым приводом и вторым приводом для одновременного удержания стрелы в горизонтальном положении с помощью первого привода при перемещении стрелы по вертикали с помощью второго привода.
В одном из вариантов осуществления для подъема стрелы по вертикали модуль управления выполнен с возможностью управления вторым приводом, чтобы он увеличивал натяжение второго каната для подъема по вертикали обоймы, подвешенной на оголовке башни, вместе со стрелой, и управления первым приводом, чтобы он уменьшал натяжение первого каната для удержания стрелы в горизонтальном положении путем опускания переднего конца стрелы.
В одном из вариантов осуществления модуль управления выполнен с возможностью управления первым приводом и вторым приводом на основе данных о натяжении канатов от датчиков натяжения канатов и/или данных о скорости намотки/размотки канатов и длине размотанной части канатов от энкодеров.
В одном из вариантов осуществления система удержания вантовой системы дополнительно содержит по меньшей мере один первый блок, причем первый канат соединяет первый привод с вантовой системой через по меньшей мере один первый блок, расположенный на вантовой системе.
В одном из вариантов осуществления стрела содержит две секции, которые соединены между собой с возможностью складывания друг относительно друга.
В одном из вариантов осуществления вантовая система содержит среднюю стойку, одним концом шарнирно присоединенную к обойме, а другим концом шарнирно присоединенную к задней и верхней вантовым оттяжкам;
вантовая система дополнительно содержит переднюю стойку, одним концом шарнирно присоединенную к узлу соединения секций стрелы, а другим концом шарнирно присоединенную к верхней вантовой оттяжке и к передней вантовой оттяжке;
передняя секция стрелы подвешена на передней вантовой оттяжке;
задняя секция стрелы подвешена на задней вантовой оттяжке.
В одном из вариантов осуществления кран дополнительно содержит канатно-блочную систему складывания стрелы, содержащую третий привод, расположенный на стороне одной секции стрелы, третий канат и по меньшей мере один третий блок, причем третий канат соединяет третий привод с другой секцией стрелы через по меньшей мере один третий блок, расположенный на передней вантовой оттяжке.
В одном из вариантов осуществления вантовая система содержит среднюю стойку, первым концом шарнирно присоединенную к обойме, распорки, первым концом шарнирно присоединенные к обойме, и поворотную рамку, первым концом шарнирно присоединенную ко второму концу средней стойки, а вторым концом шарнирно присоединенную ко вторым концам распорок, и заднюю стойку, первым концом шарнирно присоединенную к поворотной рамке, а вторым концом присоединенную к первому приводу через первый канат, причем поворотная рамка содержит проем, достаточный для прохождения сквозь него башни при перемещении стрелы по вертикали.
Кроме того, во втором аспекте настоящего изобретения предложен способ вертикального перемещения стрелы складного башенного крана, описанного в первом аспекте, содержащий этапы, на которых:
выполняют подъем стрелы по вертикали, при этом с использованием модуля управления управляют вторым приводом, чтобы он увеличивал натяжение второго каната для подъема по вертикали обоймы, подвешенной на оголовке башни, вместе со стрелой, и управляют первым приводом, чтобы он уменьшал натяжение первого каната для удержания стрелы в горизонтальном положении путем опускания переднего конца стрелы, или
выполняют опускание стрелы по вертикали, при этом с использованием модуля управления управляют вторым приводом, чтобы он уменьшал натяжение второго каната для опускания по вертикали обоймы, подвешенной на оголовке башни, вместе со стрелой, и управляют первым приводом, чтобы он увеличивал натяжение первого каната для удержания стрелы в горизонтальном положении путем подъема переднего конца стрелы.
Технический результат
Настоящее изобретение обеспечивает повышенную эффективность систем, устройств и способов для строительства, в том числе повышение автоматизации и скорости строительства, уменьшение количества оборудования, необходимого для строительства, упрощение складывания/раскладывания, повышение компактности в сложенном состоянии, возможность строительства одним и тем же оборудованием как малых, так и относительно крупных строительных форм и конструкций (в том числе многоэтажных зданий).
Эти и другие преимущества настоящего изобретения станут понятны при прочтении нижеследующего подробного описания со ссылкой на сопроводительные чертежи.
Краткое описание чертежей
На Фиг. 1 показан общий вид башенного крана в рабочем разложенном состоянии со стрелой в верхнем положении.
На Фиг. 2 показан вид сбоку башенного крана в рабочем разложенном состоянии со стрелой в верхнем положении.
На Фиг. 3 показан общий вид вантовой системы в разложенном состоянии.
На Фиг. 4 показан вид сбоку вантовой системы в разложенном состоянии.
На Фиг. 5 показан вид сверху в разрезе вантовой системы в разложенном состоянии.
На Фиг. 6-8 показан процесс складывания вантовой системы.
На Фиг. 9-11 показан процесс складывания стрелы.
На Фиг. 12 показан результат складывания башни.
На Фиг. 13 схематически показана кинематика канатно-блочных систем удержания вантовой системы и перемещения стрелы.
На Фиг. 14 показан результат опускания стрелы.
На Фиг. 15 показана конструкция системы строительства зданий с устройством установки строительного блока.
На Фиг. 16 показан пример использования системы строительства зданий в качестве традиционного башенного крана.
Следует понимать, что фигуры могут быть представлены схематично и не в масштабе и предназначены, главным образом, для улучшения понимания настоящего изобретения.
Подробное описание
Общее описание конструкции
Далее со ссылками на чертежи будет подробно рассмотрена конструкция системы 100 строительства зданий согласно настоящему изобретению.
Во избежание загромождения описания ненужными подробностями далее в данном документе будет сделан фокус на тех особенностях, которые присущи настоящему изобретению. Детали конструкции, которые не будут описаны подробно, известны специалисту в данной области техники и могут быть реализованы во множестве различных вариаций.
Следует отметить, что предложенная система в основном упоминается в данном документе как система строительства зданий, однако в общем случае она пригодна для возведения и иных конструкций.
Главным элементом системы 100 является устройство 110 для возведения конструкций, которое представляет собой башенный кран с рядом внесенных в него доработок, изображенный на Фиг. 1-2 в рабочем разложенном состоянии со стрелой в верхнем положении. Башенный кран 110 содержит опору 1, платформу 2 с башней 3, обойму 4, установленную на башне 3, стрелу 5, присоединенную к обойме 4 и удерживаемую вантовой системой 6, присоединенной к обойме 4, и тележку 7 (не показана на Фиг. 1-2), установленную на стреле 5.
Кран является складным, поэтому необходимо отметить, что далее в данном документе описание конструкции будет производиться главным образом в отношении разложенного крана, находящегося в рабочем состоянии, как изображено на Фиг. 1-2, если из контекста не следует иное, и термины «передний», «средний», «задний», «верхний», «нижний» и т.п. относятся именно к крану в рабочем положении.
Кран может быть стационарным или передвижным. Передвижение крана может выполняться, например, путем вращения вокруг своей оси на поворотной платформе или путем движения по уложенным на земле рельсовым путям.
Грузовая тележка имеет раму, которая установлена на стреле и может горизонтально перемещаться вдоль стрелы, например, с помощью роликов, колес и т.п. по направляющим на стреле.
Башня имеет выполненный из металла или другого подходящего материала корпус (или раму) в виде прямоугольного параллелепипеда (колонны, фермы и т.д.), расположенного в рабочем состоянии вертикально. Точная форма башни зависит от требований конкретного применения - например, поперечное сечение башни может быть квадратным, прямоугольным, треугольным и т.д. Башня может содержать одну секцию или несколько неподвижно соединенных между собой секций.
Башня выполнена с возможностью складывания относительно платформы, так что при транспортировке крана башня располагается горизонтально. Более подробно механизм складывания башни будет описан ниже в данном документе.
Стрела имеет выполненный из металла или другого подходящего материала корпус (или раму) в виде прямоугольного параллелепипеда (консоли, фермы и т.д.), расположенного в рабочем состоянии горизонтально. Точная форма стрелы зависит от требований конкретного применения - например, поперечное сечение башни и стрелы может быть квадратным, прямоугольным, треугольным и т.д.
Стрела может выполнять горизонтальное перемещение – например, за счет поворота башни или движения башни по рельсам.
Как указывалось выше, кран должен быть складным, поэтому стрела складывается относительно башни. В целях увеличения рабочего пространства вокруг крана целесообразно выполнять складывание стрелы относительно края башни – например, относительно оголовка башни.
В одном варианте осуществления стрела содержит одну единую секцию или собрана из нескольких неподвижно соединенных между собой подсекций. Данный вариант применим для случаев, когда высота башни и соответствующая ей длина стрелы удовлетворяют требованиям по высоте и площади возводимой конструкции в рамках доступного рабочего пространства вокруг крана.
В другом варианте осуществления стрела содержит переднюю 5a и заднюю 5b секции (балки), которые шарнирно соединены между собой и складываются друг относительно друга. Таким образом, обеспечивается возможность увеличить длину стрелы почти в 2 раза по сравнению с высотой башни. Данный вариант применим для случаев, когда необходимо обеспечить увеличенную площадь рабочего пространства вокруг крана без увеличения высоты башни или наоборот, уменьшить высоту башни без потери доступного рабочего пространства вокруг крана. Например, когда имеются ограничения по высоте башни и длине стрелы, связанные с габаритами сложенной конструкции при транспортировке, данный вариант позволяет удовлетворить эти ограничения, максимизировав при этом доступную высоту крана и площадь рабочего пространства вокруг него. Каждая секция стрелы может быть единой конструкцией или же собранной из нескольких неподвижно соединенных между собой подсекций.
Установленная на башне обойма 4 предназначена для обеспечения возможности вертикального перемещения стрелы вдоль башни. Обойма содержит выполненную из металла или другого подходящего материала раму - например, в виде прямоугольного параллелепипеда. Точная форма рамы обоймы выбирается в зависимости от требований конкретного применения. Рама обоймы охватывает башню и может горизонтально перемещаться вдоль нее - например, с помощью роликов, колес и т.п. по направляющим на башне. В варианте осуществления, который приведен на чертежах, используются ролики, установленные на внутренней стороне обоймы.
Стрела одним концом шарнирно присоединена к обойме, так чтобы обеспечивалась возможность складывания, то есть шарнирное соединение выполнено в области нижней стенки стрелы с торцевой стороны стрелы, обращенной к обойме, или под ней. Кроме того, обойма имеет со стороны стрелы боковые выступы 8a и 8b, одной стороной неподвижно закрепленные к раме обоймы, а другой стороной примыкающие к боковым стенкам стрелы торец-в-торец. Шарнирное соединение обоймы со стрелой при этом может быть выполнено в области нижней части бокового выступа или под ним. Боковые выступы обоймы могут быть выполнены в виде пластины, трубы, профиля и т.д. и могут иметь форму треугольника или иную подходящую форму, которая допускает свободное опускание стрелы на шарнирах, но препятствует ее задиранию вверх выше горизонтали. Боковые стенки стрелы, соответственно, имеют ответную форму для сопряжения с боковыми выступами обоймы. В другом варианте осуществления боковые выступы обоймы могут частично охватывать боковые стенки стрелы, так что торец стрелы по меньшей мере частично находится между выступами, за счет чего ограничивается качание стрелы в горизонтальной плоскости. В другом варианте осуществления боковые выступы могут, наоборот, частично охватываться боковыми стенками стрелы, за счет чего тоже ограничивается качание стрелы в горизонтальной плоскости. Еще в одном варианте осуществления боковые выступы могут сочетать в себе предыдущие варианты осуществления, так что одна часть выступа имеет элемент, который примыкает к торцу боковой стенки стрелы, а другая часть выступа частично охватывает эту стенку или охватывается ей, за счет одновременно предотвращается задирание стрелы вверх выше горизонтали и качание стрелы в горизонтальной плоскости.
Верхние стороны боковых выступов обоймы могут быть соединены между собой с помощью расположенной между ними, на них или над ними горизонтальной боковой полочки 9, усиленной боковыми выступами, которые выполняют роль ребер жесткости. Боковая полочка обоймы может быть выполнена в виде пластины, трубы, профиля и т.д. и может иметь форму прямоугольника или иную подходящую форму. На боковой полочке могут размещаться другие компоненты устройства, как будет показано далее в настоящем документе. Аналогично боковым выступам, боковая полочка обоймы может примыкать к верхней стенке стрелы торец-в-торец, частично охватывать ее или сочетать в себе эти варианты. Верхняя стенка стрелы, соответственно, может иметь ответную форму для сопряжения с боковой полочкой обоймы.
Вантовая система
Удержание стрелы выполняется с помощью вантовой системы 6. Местом крепления для основной части вантовой системы служит обойма.
Вантовая система 6, пример которой в разложенном состоянии показан на Фиг. 3-4, включает в себя поворотную рамку 10, выполненную в форме прямоугольной вилки, внутри которой закреплена по меньшей мере одна поперечина 11, разделяющая поворотную рамку 10 по меньшей мере на два технологических проема. Например, на Фиг. 3 изображено три поперечины 11a, 11b, 11c, которые делят внутреннее пространство поворотной рамки 10 на четыре технологических проема 12a, 12b, 12c, 12d. По меньшей мере один из проемов (на Фиг. 3 это проемы 12b и 12d) выполнен для прохождения через него башни 3. В частности, как видно из Фиг. 5, на которой показан вид сверху в разрезе вантовой системы в разложенном состоянии, проем 12b, образованный в пространстве между поворотной рамкой 10 и поперечинами 11a и 11b, достаточен для прохождения в нем башни 3, которую охватывает обойма 4.
Вантовая система 6 дополнительно включает в себя среднюю стойку 13, выполненную в виде прямоугольной рамки, одним концом шарнирно присоединенную к верхней части (первому концу или первым концам) поворотной рамки 10 и совмещенную с узлом 31 крепления вантовых оттяжек 14 и 15, а другим концом шарнирно присоединенную к боковым выступам 8a, 8b и/или к боковой полочке 9 обоймы. В других вариантах осуществления средняя стойка может быть выполнена не в виде прямоугольной рамки, а например, в виде п-образной рамки, дугообразной рамки, одиночной прямоугольной трубы, в виде двух или более соединенных между собой или не имеющих между собой непосредственного соединения стоек, труб или профилей, и т.д. Средняя стойка 13 в данном документе может также называться первой стойкой.
Вантовая система 6 дополнительно включает в себя распорки (рычаги) 16a, 16b, первым концом шарнирно присоединенные к раме обоймы в ее задней части, а вторым концом шарнирно присоединенные к нижней части (второму концу или вторым концам) поворотной рамки 10. Таким образом, распорки 16a, 16b и средняя стойка 13 служат, соответственно, малым и большим радиусом вращения относительно обоймы 4, то есть поворотная рамка 10 может перемещаться (вращаться, поворачиваться) относительно обоймы 4. Соотношение длины распорок 16a, 16b и средней стойки 13 в примерном варианте осуществления может составлять 1:2.
Вантовая система 6 дополнительно включает в себя заднюю стойку 17, выполненную в виде рамки, верхней своей частью (первым концом) шарнирно присоединенную ко вторым концам распорок 16a, 16b и совмещенную с узлом/узлами 32 крепления поворотной рамки 10 с распорками 16a, 16b, а нижней своей частью (вторым концом) присоединенную с помощью блоков 18a, 18b к канатно-блочной системе 19 удержания вантовой системы. Рамка, составляющая основу задней стойки 17, может быть выполнена в виде прямоугольной рамки, п-образной рамки, дугообразной рамки и т.д. Задняя стойка 17 в данном документе может также называться второй стойкой.
Помимо упомянутых блоков 18a, 18b задней стойки, канатно-блочная система 19 удержания вантовой системы включает в себя нижний блок 20, канат (трос) 21 и привод 22. Привод 22 представляет собой выполненный с возможностью вращения барабан, на который намотан канат 21. Привод 22 расположен на платформе 2 в задней ее части, под задней стойкой 17 вантовой системы. Ось вращения привода 22 параллельна оси вращения блоков 18a, 18b задней стойки. Канат 21 проходит от привода 22 вверх к одному из блоков 18a, 18b задней стойки, далее вниз к нижнему блоку 20, установленному на платформе 2 около привода 22. Ось вращения нижнего блока 20 перпендикулярна оси вращения привода 22. Далее от нижнего блока 20 канат 21 проходит вверх к другому из блоков 18a, 18b задней стойки и снова вниз к платформе 2, на которой жестко закрепляется в области около привода 22. Тем самым, образуется простой и надежный полиспаст, позволяющий выполнять функции удержания вантовой системы в рабочем положении, а также перемещения вантовой системы при складывании стрелы и при вертикальном перемещении стрелы.
Выше указан вариант осуществления, в котором первые концы задней стойки 17, вторые концы поворотной рамки 10 и вторые концы подвижных распорок 16a, 16b присоединяются друг к другу на одной оси в узле или узлах 32 их шарнирного соединения. Такая конструкция является более простой в сборке и в проектировании, однако возможны и иные конструкции. Например, в другом варианте осуществления конец задней стойки 17 может присоединяться не к концу распорки 16, а к какому-либо другому ее участку, при этом конец распорки присоединяется к концу поворотной рамки 10. Еще в одном варианте осуществления конец задней стойки 17 может присоединяться к концу поворотной рамки 10, тогда как конец распорки 16 присоединяется не к точке соединения задней стойки 17 с поворотной рамкой 10, а либо к задней стойке 17, либо к поворотной рамке 10 в точке, отличной от ее конца. При необходимости могут быть реализованы и иные варианты соединения, обеспечивающие необходимый функционал удержания и перемещения вантовой системы с сохранением преимуществ настоящего изобретения.
Вантовая система 6 дополнительно включает в себя откидную стойку 23, выполненную в виде рамки, которая может быть выполнена в виде прямоугольной рамки, п-образной рамки, дугообразной рамки и т.д. Откидная стойка 23 в данном документе может также называться третьей стойкой. Передняя часть (первый конец или первые концы) откидной стойки 23 шарнирно присоединена к нижней части обоймы 4 ближе к переднему торцу обоймы 4. Задняя часть откидной стойки 23 содержит по меньшей мере один разъем 24 и в рабочем развернутом положении вантовой системы находится в свободном (незакрепленном) положении за счет по меньшей мере одного ограничителя 25, установленного в нижней части обоймы 4 ближе к заднему торцу обоймы 4 и удерживающего откидную стойку 23 на весу. Упомянутый по меньшей мере один разъем 24 предназначен для стыковки с по меньшей мере одним разъемом 26 задней стойки (например, расположенным между блоками 18a, 18b, как изображено на Фиг. 3) при складывании вантовой системы 6 (то есть при перемещении задней стойки 17 в направлении обоймы 4). После того, как разъемы 24 и 26 входят в зацепление, в процессе дальнейшего складывания вантовой системы откидная стойка 23 тоже приходит в движение и, выступая в роли рычага, препятствует столкновению задней стойки 17 с обоймой 4.
В варианте осуществления, в котором стрела содержит две секции, вантовая система 6 дополнительно включает в себя переднюю стойку 27, нижним (первым) концом шарнирно присоединенную к узлу 28 шарнирного соединения секций стрелы, а верхним (вторым) концом присоединенную к вантовой оттяжке 14, протянутой от узла 31 крепления вантовых оттяжек 14 и 15 с поворотной рамкой 10 и средней стойкой 13. Кроме того, когда вантовая система находится в развернутом рабочем положении, на верхнем (втором) конце передней стойки 27 подвешена передняя вантовая оттяжка 29, которая соединена, соответственно, с передней секцией стрелы. Передняя стойка 27 может быть выполнена в виде прямоугольной рамки, п-образной рамки, дугообразной рамки, одиночной прямоугольной трубы, двух или более соединенных между собой или не имеющих между собой непосредственного соединения стоек, труб или профилей, и т.д. Передняя стойка 27 в данном документе может также называться четвертой стойкой.
Задняя вантовая оттяжка 15, когда вантовая система находится в развернутом рабочем положении, одним концом подвешена на средней стойке 13 с помощью узла 31 крепления, а другим концом соединена с задней секцией стрелы. Задняя вантовая оттяжка 15 и передняя вантовая оттяжка 29 предназначены для удержания стрелы. Верхняя вантовая оттяжка 14 предназначена для удержания передней стойки 27. Следует понимать, что выше каждая вантовая оттяжка упоминается в единственном числе, но при необходимости может использоваться большее число вантовых оттяжек того или иного вида. Например, на Фиг. 3 видно, что используется две задних вантовых оттяжки 15.
Складывание
Как указывалось выше, одна из ключевых особенностей настоящего изобретения – возможность складывания и раскладывания крана.
Складывание производится из рабочего положения, то есть из положения, в котором башня установлена вертикально, а стрела развернута и установлена горизонтально. Перед складыванием стрела отводится в крайнее верхнее положение, чтобы не задеть землю и обеспечить необходимое пространство под обоймой. При этом обойма фиксируется на башне, чтобы избежать ее непроизвольного движения вниз или наклона под нагрузками и избежать необходимости использования в этом процессе канатно-блочной системы 35 перемещения стрелы (будет подробно описана позднее в разделе «Вертикальное перемещение стрелы»). Фиксация обоймы на башне может производиться, например, с помощью фиксаторов (пальцев, выдвижных уголков и т.д.) вручную или автоматически. В конкретном неограничивающем примере устройство 49 фиксации обоймы (не показано на чертежах) располагается внутри башни в верхней ее части на уровне низа обоймы, когда она находится в верхнем положении, выполнено в виде кривошипно-шатунного механизма и содержит привод, колесо, приводимое в движение приводом, и два пальца, приводимых в движение (выдвигающихся в разные стороны от оси колеса) с помощью шатунов, присоединенных к краям колеса.
Чтобы запустить процесс складывания стрелы и вантовой системы, приводится в действие канатно-блочная система 19 – в частности, с помощью привода 22 выполняется разматывание каната 21. Натяжение каната 21 ослабевает, стрела под собственным весом начинает опускаться относительно шарниров, на которых она установлена на обойме, и утягивает с собой вантовую систему.
Процесс складывания вантовой системы отдельно показан на Фиг. 6-8. Средняя стойка 13, задняя стойка 17, распорки 16a, 16b и поворотная рамка 10 во время складывания приходят в движение относительно шарнирных узлов сопряжения, соединяющих вантовую систему с обоймой. Задняя стойка 17, будучи подвешенной на распорках 16a, 16b, удерживается снизу канатно-блочной системой 19, поэтому за счет кругового движения распорок поначалу приближается к обойме. По мере движения задней стойки 17 расположенный на ней разъем 26 движется в направлении разъема 24 откидной стойки 23, и с того момента, когда они соединяются, при дальнейшем складывании вантовой системы откидная стойка 23 тоже приходит в движение (см. Фиг. 6 в сравнении с Фиг. 4) и, выступая в роли рычага, заставляет нижнюю часть задней стойки 17 двигаться вокруг обоймы. Таким образом, в конечной фазе складывания вантовая система огибает обойму (Фиг. 7-8), и часть обоймы оказывается внутри нижнего технологического проема 12d, образованного поворотной рамкой 10 и задней стойкой 17.
Процесс складывания стрелы показан на Фиг. 9-11. Для удобства понимания моменты времени, в которые зафиксировано складывание стрелы на Фиг. 9-11, соответствуют моментам времени, в которые зафиксировано складывание вантовой системы на Фиг. 6-8.
Поскольку стрела является складной, вантовые оттяжки 14, 15, 29 тоже должны иметь возможность складывания. Применение гибкого материала, такого как канат или трос, нецелесообразно во избежание запутывания, поэтому предлагается выполнять вантовые оттяжки из жестких складных стержней, трубок, балок и т.п. Складывание вантовой оттяжки может выполняться с помощью шарнира, расположенного на ней. Точки складывания (положения шарниров) и направления складывания зависят от точек соединения вантовых оттяжек со стрелой и размеров самих вантовых оттяжек, средней стойки, передней стойки и секций стрелы и выбираются таким образом, чтобы сложенная вантовая оттяжка не выступала за пределы пространства между сложенными секциями стрелы. В одном неограничивающем примере передняя вантовая оттяжка 29 может складываться посередине в направлении стрелы, верхняя вантовая оттяжка 14 может складываться в направлении стрелы в точке, которая при складывании вантовой системы оказывается около узла 28 шарнирного соединения секций стрелы, а задняя вантовая оттяжка 15 может складываться в направлении от стрелы в точке, которая при складывании вантовой системы оказывается около узла 28 шарнирного соединения секций стрелы.
Как можно видеть на Фиг. 9-10, складывание секций стрелы друг относительно друга выполняется одновременно или попеременно со складыванием стрелы относительно башни, чтобы избежать столкновения конца стрелы с землей. Для этого используется канатно-блочная система 60 складывания стрелы, а именно, установленный внутри задней секции стрелы привод 30 затягивает (сматывает) канат 33, который проходит через установленный на задней секции стрелы блок 34 и через установленный на верхнем конце передней стойки 27 блок 46 и своим дальним концом жестко соединен с передней секцией стрелы, при этом мертвый конец 47 каната 33 располагается на передней секции стрелы на расстоянии от узла 28 шарнирного соединения секций стрелы, равном или незначительно превышающем длину передней стойки 27 (с учетом блока 46). Приблизительно на таком же расстоянии от узла 28 шарнирного соединения секций стрелы располагается и блок 34 на задней секции стрелы. Затягивание каната 33 заставляет переднюю секцию стрелы двигаться в направлении задней секции стрелы относительно шарниров 28, с помощью которых секции соединены между собой. Передняя стойка 27, как и вантовые оттяжки, складывается во внутреннее пространство между секциями стрелы также под действием каната 33.
В процессе складывания стрелы на переднюю стойку 27 сначала (Фиг. 9) действует высокая нагрузка в направлении передней секции стрелы (для этого соответствующим образом подбираются углы наклона задней секции стрелы относительно башни и относительно передней секции стрелы и регулируется работа приводов 22 и 30), которая препятствует движению передней стойки 27 в направлении задней секции стрелы, поэтому первой ослабляется и складывается передняя вантовая оттяжка 29. Далее, когда передняя стойка 27 достигает передней секции стрелы, она входит в сопряжение с расположенным на стреле разъемом 48 (например, защелкой) (не показано на чертежах), тем самым фиксируется и ее положение, и положение сложенной передней вантовой оттяжки 29. При дальнейшем складывании стрелы (Фиг. 10) происходит ослабление и складывание верхней вантовой оттяжки 14, задней вантовой оттяжки 15, а также средней стойки 13 и поворотной рамки 10 во внутреннее пространство между секциями стрелы. Данный подход упорядочивает складывание и препятствует запутыванию вантовых оттяжек, стоек и канатов.
В результате складывания стрелы, как показано на Фиг. 11, башня по-прежнему остается расположенной вертикально, но секции стрелы оказываются сложенными друг относительно друга и относительно башни, то есть секции стрелы также занимают вертикальное положение параллельно башне. Вантовая система в сложенном состоянии расположена по большей части между секциями стрелы, часть обоймы и оголовок башни выступают из технологического проема вантовой системы.
Для максимизации размеров стрелы задняя секция имеет длину, приблизительно равную расстоянию вдоль башни от точки крепления к обойме (то есть от шарнира) до платформы, а передняя секция может быть немного длиннее и иметь длину, приблизительно равную расстоянию вдоль башни от платформы до боковой полочки 9 обоймы, как видно на Фиг. 11. Как указывалось выше, перед складыванием стрела отводится в крайнее верхнее положение, поэтому данные размеры не препятствуют складыванию.
После того, как стрела сложена, выполняется складывание башни. Прежде чем перейти к процессу складывания, необходимо описать конструкцию крепления башни к платформе.
В предложенном изобретении башня установлена на платформе с помощью рычажного механизма 50, содержащего два нижних рычага 51, два верхних рычага 52 и кронштейн 53, расположенный на передней стенке башни выше платформы 2 на уровне низа обоймы, когда она находится в нижнем положении. Тем самым, кронштейн 53 может выполнять функцию ограничителя хода обоймы в нижнем направлении. Нижний рычаг 51 нижним концом шарнирно соединен с платформой 2 около передней части башни, а верхним концом шарнирно соединен с кронштейном 53 в нижней его части. В свою очередь, верхний рычаг 52 нижним концом шарнирно соединен с платформой 2 позади задней стенки башни, а верхним концом шарнирно соединен с кронштейном 53 в верхней его части. Длина верхнего рычага 52 больше длины нижнего рычага 51. Таким образом, обеспечивается возможность наклона и поворота башни относительно платформы с помощью рычагов.
Верхний рычаг 52 является, по существу, прямым, а нижний рычаг 51 выполнен в виде уголка, позволяющего огибать верхний рычаг, когда башня находится в горизонтальном положении (Фиг. 12). В другом варианте осуществления нижний рычаг 51 расположен во внешней плоскости по отношению к верхнему рычагу 52, поэтому их траектории не пересекаются, и тогда оба рычага могут быть прямыми. Это упрощает конструкцию нижних рычагов, однако может несколько усложнить конструкцию кронштейна 53 и/или шарнирных соединений.
Предложенная конструкция крепления башни к платформе позволяет несколько сместить центр тяжести башни вперед, поэтому, когда башня находится в вертикальном положении, она не стремится падать самопроизвольно назад, а удерживается на рычагах.
Также для удержания башни в вертикальном положении используется канатно-блочная система 55 удержания башни (см. Фиг. 1), содержащая привод 56, который расположен на платформе 2 в задней ее части и представляет собой выполненный с возможностью вращения барабан, на который намотан канат (трос) 57. Канат 57 проходит от привода 56 через блоки 58, расположенные на платформе у основания башни, к блокам 59, расположенным на башне у ее основания. Для обеспечения равномерности прикладываемой нагрузки и увеличения полиспастности блоки 58 и 59 могут быть выполнены в виде ряда блоков, расположенных вдоль задней стенки башни. В примере, показанном на Фиг. 1, мертвый конец каната 57 закреплен также на башне около блоков 59, но может при необходимости располагаться на платформе.
От опрокидывания вперед башню предохраняют выполненные на платформе уступы или упоры, геометрию которых повторяет геометрия нижней части башни. В примере на Фиг. 12 видно, что нижняя часть башни выполнена с наклонным торцом, и упоры на платформе (не показаны на чертежах, поскольку скрыты внутри платформы) имеют такой же угол наклона, что позволяет фиксировать башню в вертикальном положении. Эти же упоры также принимают на себя часть нагрузки, которую испытывает башня в вертикальном положении, что позволяет снять часть нагрузки с рычагов 51, 52.
Кроме того, для дополнительной фиксации башни на платформе используются фиксаторы (например, пальцы, выдвижные уголки и т.д.). В конкретном неограничивающем примере устройство 54 фиксации башни (не показано на чертежах) располагается внутри башни в ее нижней передней части, выполнено в виде кривошипно-шатунного механизма и содержит привод, колесо, приводимое в движение приводом, и два пальца, приводимых в движение (выдвигающихся в разные стороны от оси колеса) с помощью шатунов, присоединенных к краям колеса.
Для запуска процесса складывания башни сначала с платформы снимается противовес. Затем выполняется раскрепление башни от платформы, а именно фиксаторы выводятся из крепежного положения (например, автоматически с помощью устройства 54 фиксации башни), и башня, будучи подвешенной на рычагах 51, 52, получает возможность поворота. Тем не менее, как указывалось выше, под собственным весом башня не начинает сразу падать/опускаться в горизонтальное положение, поскольку у нее смещен центр тяжести и поскольку ее удерживает канатно-блочная система 55 удержания башни.
Чтобы привести башню в движение, канатно-блочная система 55 удержания башни с помощью привода 56 разматывает канат 57, натяжение каната 57 ослабевает, башня под своим весом начинает опускаться относительно рычагов 51, 52, на которых она установлена на платформе 2. В процессе складывания нижняя часть башни, увлекаемая рычагами 51, 52, несколько выступает вперед (относительно рабочего положения) до исчерпания рычагами запаса хода, тогда как остальная часть опускается назад.
Скорость складывания регулируется автоматически или оператором на основании данных о натяжении каната 57 с датчика натяжения каната, установленного на мертвом конце каната 57. Следует понимать, что при складывании башни изменяется натяжение и в канатно-блочных системах 19 и 35, поэтому эти системы также компенсируют возникающий сдвиг натяжения на основании датчиков натяжения канатов, установленных на мертвых концах соответствующих канатов, работая одновременно или попеременно с канатно-блочной системой 55.
В конечном счете башня, а вместе с ней и сложенные ранее задняя секция и передняя секция стрелы, занимают горизонтальное положение. Результат складывания башни показан на Фиг. 12.
Раскладывание стрелы представляет собой процесс, обратный складыванию. В частности, это подъем башни из горизонтального в вертикальное положение, фиксация башни на платформе, установка противовеса на платформу и затем разворачивание стрелы в горизонтальное положение и снятие фиксации обоймы на стреле. Как и при складывании, приводы 30 и 22 работают при раскладывании стрелы одновременно или попеременно, чтобы обеспечить разворачивание вантовой системы и предотвратить столкновение конца стрелы с землей.
Таким образом, обеспечивается ускоренное автоматическое складывание и раскладывание крана. В сложенном состоянии кран является компактным и пригоден к транспортировке грузовыми транспортными средствами традиционных размеров. Более того, для повышения автономности и автоматизации кран заведомо может быть установлен на мобильной платформе (например, непосредственно на грузовом автомобиле или в виде прицепа). Доставив кран в точку его установки, достаточно лишь подключить его к питанию и в процессе раскладывания установить противовес, остальные действия он произведет самостоятельно.
Соответственно, настоящее изобретение значительно упрощает транспортировку и монтаж башенного крана.
Вертикальное перемещение стрелы
Другой важной особенностью настоящего изобретения является возможность перемещения стрелы башенного крана по вертикали. Для обеспечения этой возможности кран дополнительно снабжен канатно-блочной системой 35 перемещения стрелы. Также в перемещении стрелы участвует канатно-блочная система 19 удержания вантовой системы. Схематическое изображение кинематики канатно-блочной системы 19 удержания вантовой системы и канатно-блочной системы 35 перемещения стрелы показано на Фиг. 13.
Элементы, составляющие канатно-блочную систему 19 удержания вантовой системы, описаны подробно выше.
Что касается канатно-блочной системы 35 перемещения стрелы, то она содержит привод 36, который расположен на платформе 2 в задней ее части и представляет собой выполненный с возможностью вращения барабан, на который намотан канат (трос) 37. Канат 37 проходит от привода 36 через блоки 38-40, расположенные у основания башни, к блоку 41, расположенному на оголовке 45 башни. Кроме того, на оголовке 45 башни расположены блоки 42a и 42b. Блок 41 расположен на краю оголовка 45 башни под углом таким образом, чтобы с одной стороны принимать канат 37, а с другой стороны вместе с блоком 42a обеспечивать подвес блока 43a, расположенного на обойме 4. Пройдя через блоки 41, 43a и 42a, канат проходит к блоку 42b. Конец каната жестко закреплен на оголовке 45 башни, за счет чего вместе с блоком 42b обеспечивается подвес блока 43b, расположенного на обойме 4. Блоки 43a и 43b соосны и расположены параллельно на противоположных стенках обоймы.
Предложенная конструкция обеспечивает одинаково высокую полиспастность у обеих канатно-блочных систем 19 и 35, которая составляет 4:1. Это обеспечивает снижение нагрузки на приводы, снижение массогабаритных параметров и энергопотребления приводов, которые необходимо использовать в кране, и упрощение управления этими приводами. Кроме того, приводы размещаются вблизи друг от друга на платформе, что повышает ремонтопригодность и удобство обслуживания, а также снижает вес башни и стрелы и упрощает складывание и раскладывание крана.
Следует понимать, что в других вариантах осуществления возможно иное расположение блоков и иная конструкция канатно-блочной системы, при этом должен сохраняться принцип, при котором обойма подвешена с помощью канатно-блочной системы на оголовке башни.
Следует также отметить, что в примере на Фиг. 1 приводы 56 и 36 имеют общую ось вращения, но расположены и двигаются независимо друг от друга. Аналогичным образом, блоки 58 и 59 имеют общие оси с блоками 38 и 39, но расположены и двигаются независимо друг от друга. Соответственно, во избежание загромождения чертежей приводы 56 и 36, блоки 58 и 59 и блоки 38 и 39 могут быть показаны на чертежах как единые элементы, но фактически таковыми не являются.
Процесс опускания стрелы башенного крана по вертикали состоит в следующем. Вращение вала привода 36 (лебедки) осуществляется для разматывания каната 37, и ослабление натяжения каната 37 приводит к тому, что подвешенная на блоках 43a и 43b обойма опускается вниз, а вместе с обоймой опускается и закрепленная на ней стрела.
При этом необходимо отметить, что стрела в предложенном кране подвешена на вантовой системе, которая удерживается канатно-блочной системой 19. Опускание обоймы приводит к тому, что опускается не только стрела, но и закрепленная на обойме вантовая система. Соответственно, происходит ослабление натяжения каната 21, и передний конец стрелы начинает падать и/или стрела начинает складываться, что нарушает геометрию стрелы и отклонение от горизонтали. Для преодоления этих негативных явлений выполняется вращение привода 22 для сматывания (наматывания) каната, так чтобы стрела оставалась строго в горизонтальном положении.
Башенный кран со стрелой в нижнем положении, то есть результат опускания стрелы, показан на Фиг. 14. В процессе вертикального перемещения стрелы башня проходит через верхний технологический проем 12b поворотной рамки 10 вантовой системы (см. Фиг. 5, 14), то есть предложенная конструкция вантовой системы не препятствует перемещению стрелы.
Подъем стрелы представляет собой процесс, обратный опусканию стрелы. В частности, вращение вала привода 36 (лебедки) осуществляется для сматывания каната 37, и увеличение натяжения каната 37 приводит к тому, что подвешенная на блоках 43a и 43b обойма поднимается вверх, а вместе с обоймой поднимается и закрепленная на ней стрела.
Подъем обоймы приводит к тому, что происходит увеличение натяжения каната 21, и передний конец стрелы начинает задираться вверх. Конструкция боковых выступов и боковой полочки обоймы препятствует задиранию стрелы, однако не устраняет проблему перенатяжения каната 21 и риск его обрыва или поломки канатно-блочной системы 19, поэтому выполняется вращение привода 22 для разматывания каната, так чтобы стрела оставалась строго в горизонтальном положении.
Вышеописанные особенности конструкции канатно-блочных систем приводят к тому, что вращение приводов выполняется в противоположных направлениях, то есть когда барабан 22 пуст, барабан 36 полон, и наоборот. Кроме того, барабаны имеют многослойную навивку. Из-за этих факторов при одинаковом движении барабанов канаты наматываются/разматываются с разной скоростью, что приводит к разбежке и вновь к проблемам с разным натяжением канатов. Для компенсации этих ошибок предлагается использовать датчик натяжения для каждого каната и программно синхронизировать управление движением приводов, отслеживая натяжение канатов с помощью датчиков. Датчик натяжения каната устанавливается, как правило, на мертвом конце каната, где измерения наиболее точны и стабильны. Кроме того, для регулирования могут использоваться энкодеры, установленные на барабанах и позволяющие отслеживать длину размотанной части каната и скорость намотки/размотки, и/или ПИД-регуляторы.
Таким образом, обеспечивается возможность автоматического вертикального перемещения стрелы с сохранением ею строго горизонтального положения в кране, который при этом обладает возможностью автоматического складывания и башни, и стрелы.
Более того, механизмы, ответственные за складывание и раскладывание крана (в первую очередь это канатно-блочная система 19 удержания вантовой системы), не являются механизмами одной функции, которые вхолостую простаивали бы во время основной работы крана, а вместо этого вовлечены в основную работу крана для вертикального перемещения стрелы, что повышает коэффициент использования оборудования и увеличивает целесообразность его применения.
Автоматизация процесса строительства
В зависимости от выполняемых функций кран может традиционным средством для подъема и перемещения грузов или, например, новым средством для доставки строительных блоков и/или строительного раствора в требуемую точку в пределах рабочего пространства для автоматизированного или автоматического возведения строительных конструкций с помощью строительных блоков и/или объемной (трехмерной, 3D) печати.
В случае с 3D печатью кран может содержать печатающую головку, прикрепленную к тележке и перемещающуюся с ее помощью, и систему доставки раствора к печатающей головке, проложенную через башню и стрелу.
В случае с автоматической укладкой строительных блоков/кирпичей башенный кран, пример которого показан на Фиг. 15, может содержать конвейерную линию (или систему конвейерных линий), содержащую вертикальный башенный конвейер, присоединенный к башне, и вертикальный конвейер тележки, присоединенный к тележке, и устройство установки строительного блока, присоединенное к конвейеру тележки. Тележка может горизонтально перемещаться вдоль стрелы, конвейер тележки может вертикально перемещаться относительно тележки. Конвейерная линия предназначена для приема строительного блока на входе башенного конвейера у основания башни и перемещения строительного блока до выхода конвейера тележки у устройства установки строительного блока. Устройство установки строительного блока может захватывать строительный блок на выходе конвейерной линии и устанавливать его на возводимую конструкцию.
В другом варианте осуществления корпус конвейера тележки присоединен к тележке. Система конвейерных линий содержит вертикальный башенный конвейер, установленный внутри башни, горизонтальный конвейер стрелы, установленный внутри стрелы, и вертикальный конвейер тележки, установленный внутри корпуса конвейера тележки. Устройство установки строительного блока присоединено к нижней части корпуса конвейера тележки. Стрела выполнена с возможностью вертикального перемещения вдоль башни. Тележка выполнена с возможностью горизонтального перемещения вдоль стрелы. Корпус конвейера тележки выполнен с возможностью вертикального перемещения относительно тележки. Система конвейерных линий выполнена с возможностью перемещения строительного блока от входа у основания башни до выхода у устройства установки строительного блока. Устройство установки строительного блока выполнено с возможностью захвата строительного блока на выходе системы конвейерных линий и его установки на возводимую конструкцию.
Конвейерная линия содержит по меньшей мере вертикальный башенный конвейер и вертикальный конвейер тележки. Вертикальный конвейер может также взаимозаменяемо называться как лифтовой конвейер, вертикальный транспортер и т.д. Вертикальный конвейер содержит горизонтальные площадки (например, полки или люльки), на которых устанавливается груз и которые вертикально перемещаются вдоль оси конвейера. В частности, вертикальный башенный конвейер перемещается вертикально вдоль башни, а вертикальный конвейер тележки перемещается вертикально относительно тележки. Следует понимать, что указание «вертикальный» указывает общее направление движения, однако допустимо небольшое отклонение от вертикали, при котором по-прежнему сохраняются преимущества предложенного решения. Кроме того, выражение «конвейер перемещается» подразумевает, что перемещаются несущие элементы конвейера, то есть в вышеупомянутом примере вертикального конвейера вертикально (то есть вверх и вниз) перемещаются полки или люльки, которые предназначены для переноса груза.
В одном варианте осуществления башенный конвейер может быть установлен внутри башни, то есть внутри корпуса или рамы башни. Например, если башня имеет корпус в виде фермы, то конвейер размещается в пространстве между стержнями фермы, или если башня имеет корпус в виде колонны, то конвейер размещается в пространстве между стенками колонны. В данном случае обеспечивается разграничение между канатно-блочными системами 19 и 35, которые установлены снаружи, и путем прохождения строительного блока, что повышает надежность предложенного крана. В другом варианте осуществления башенный конвейер может быть установлен вне башни, то есть присоединен к ней снаружи в виде выносного элемента. В этом варианте обеспечивается возможность использования башни с уменьшенным внутренним пространством, что позволяет применить меры по укреплению башни и/или уменьшить ее собственные габариты (без учета конвейера). При этом в одном из вариантов осуществления конвейер может быть установлен на башню уже после транспортировки, непосредственно перед ее подъемом (раскладыванием), что может решить проблему транспортировки крана в условиях, когда пропускная способность дорог не позволяет осуществлять транспортировку заранее собранного крана целиком.
Аналогичным образом, конвейер тележки может быть установлен таким образом, чтобы проходить внутри рамы или корпуса тележки (то есть рама тележки полностью охватывает в поперечном сечении конвейер тележки), или же конвейер тележки может быть присоединен к тележке снаружи таким образом, что рама тележки имеет контакт в поперечном сечении лишь с частью конвейера тележки.
В качестве груза в конвейере используется строительный блок (не показан на чертежах). Соответственно, конвейерная линия принимает строительный блок на входе башенного конвейера у основания башни и перемещает его до выхода конвейера тележки у устройства установки строительного блока.
В одном из вариантов осуществления передача строительного блока из башенного конвейера выполняется непосредственно в конвейер тележки, для этого тележка должна переместиться вдоль стрелы к башне, и с помощью устройства передачи строительного блока (например, захвата, расположенного в конвейере тележки, или толкателя, расположенного в башенном конвейере) строительный блок, поднятый до уровня стрелы, должен быть перемещен в конвейер тележки.
В другом варианте осуществления конвейерная линия дополнительно содержит горизонтальный конвейер стрелы, присоединенный к стреле. В качестве примера, но без ограничения, горизонтальный конвейер может быть выполнен в виде ленточного, роликового, пластинчатого, скребкового конвейера и т.д. В таком варианте строительный блок перемещается с помощью башенного конвейера до стрелы, выполняется передача строительного блока с помощью устройства передачи строительного блока (например, захвата) на конвейер стрелы, затем строительный блок перемещается с помощью конвейера стрелы до тележки, и с помощью устройства передачи строительного блока (например, захвата в конвейере тележки) строительный блок из конвейера стрелы перемещается в конвейер тележки.
Следует отметить, что горизонтальный конвейер стрелы занимает мало места в поперечном сечении стрелы, поэтому установленный внутри задней секции стрелы привод 30 и канат 33 при оптимально подобранных параметрах и расположении не препятствуют работе горизонтального конвейера и прохождению по нему строительных блоков, то есть обеспечивается возможность использования горизонтального конвейера в складной стреле.
В других вариантах осуществления конвейерная линия может дополнительно содержать и иные конвейеры, необходимые для автоматического перемещения строительного блока – например, приемный горизонтальный конвейер, с помощью которого осуществляется загрузка строительных блоков в башенный конвейер.
К конвейеру тележки может быть присоединено устройство установки строительного блока. Устройство установки строительного блока содержит захват, с помощью которого оно может захватывать строительный блок на выходе конвейерной линии (то есть из конвейера тележки) и устанавливать его на возводимую конструкцию. Устройство установки строительного блока может представлять собой манипулятор в виде руки или промышленный робот иной подходящей конструкции для перемещения строительного блока от конвейера тележки до точки установки строительного блока на возводимой конструкции в необходимом положении. Захват может быть вакуумным, зажимным (механическим) или иным захватом, пригодным для надежного удержания и перемещения строительного блока.
Для того, чтобы можно было выполнять укладку строительных блоков на разных высотах, могут быть применены различные решения. В одном варианте осуществления стрела может вертикально перемещаться вдоль башни, и в таком случае вместе с ней на разные высоты перемещается конвейер тележки и устройство установки строительного блока. В другом варианте осуществления корпус конвейера тележки может вертикально перемещаться относительно тележки, за счет этого перемещая на разные высоты и устройство установки строительного блока. Возможен также вариант, совмещающий оба этих решения.
Строительный блок выполнен из материала, необходимого для возведения требуемой конструкции – например, из бетона, пенобетона, газобетона, кирпича и т.п. В настоящем документе строительный блок также взаимозаменяемо может в некоторых случаях называться просто «блок», однако не следует путать его с блоком канатно-блочной-системы, который в общем случае представляет из себя вращающееся на оси колесо с желобом. Конкретное значение слова «блок», используемого в той или иной части данного документа, следует из контекста и должно быть понятно специалисту. Форма строительного блока выбирается в соответствии с требованиями конкретного применения и может представлять собой, например, параллелепипед, куб, треугольную призму и т.д. Для обеспечения удержания строительных блоков друг на друге в возводимой конструкции могут применяться различные решения: например, может устанавливаться вертикальная арматура, на которую могут надеваться строительные блоки через отверстия в них; или строительные блоки могут иметь ответные выступы, выемки и иные конструктивные элементы, при сопряжении которых строительные блоки не смещаются друг относительно друга; или строительные блоки могут скрепляться между собой строительным раствором/клеем; или может использоваться какая-либо комбинация из этих решений.
В варианте осуществления, в котором используется раствор для скрепления строительных блоков, предложенный кран дополнительно содержит систему доставки раствора (не показана на чертежах), содержащую трубопроводы, установленные вдоль пути доставки строительного блока к устройству установки строительного блока, то есть приблизительно там же, где проходит система конвейерных линий, а именно вдоль башни, стрелы и конвейера тележки. Насосы системы доставки раствора могут быть установлены, например, в основании крана. Также кран содержит устройство нанесения раствора, присоединенное к корпусу конвейера тележки и предназначенное для нанесения раствора, полученного через систему доставки раствора, на строительный блок перед его установкой на возводимую конструкцию. На какие именно стороны строительного блока следует наносить раствор и характер нанесения раствора зависит от конкретного применения. Еще в одном варианте устройство нанесения раствора может наносить раствор не на строительный блок, а на поверхность, куда будет устанавливаться строительный блок. Возможно также и применение обоих этих вариантов одновременно, когда раствор наносится и на строительный блок, и на место его установки.
Соответственно, обеспечивается устройство для возведения строительных конструкций, выполненное в виде складного башенного крана с рядом внесенных в него доработок. Башенный кран в собранном виде доставляется, например, в виде прицепа грузового автомобиля, фиксируется в нужной точке на раздвижных опорах, подключается к питанию, автоматически раскладывает башню, затем на платформу устанавливается противовес, затем кран автоматически раскладывает стрелу и тем самым приводится в рабочее положение. Далее в процессе работы строительный блок подается на вход конвейерной линии у основания башни, перемещается с помощью башенного конвейера до уровня стрелы, где передается в конвейер тележки напрямую или пройдя через конвейер стрелы, затем перемещается с помощью конвейера тележки до выхода конвейерной линии, где захватывается устройством установки строительного блока и устанавливается в необходимом положении на возводимой строительной конструкции. При этом охватывается большое пространство, в рамках которого обеспечена возможность автоматического возведения конструкций, поскольку, как было указано выше, предложенный башенный кран предусматривает возможность перемещения стрелы и конвейера тележки как по горизонтали, так и по вертикали, за счет чего обеспечивается доставка устройства установки строительного блока, а также самого строительного блока в любую точку в пределах этого пространства.
За счет наличия конвейера тележки стрела не нависает непосредственно вблизи строящейся конструкции, что обеспечивает возможность нахождения персонала в области под стрелой, допустимость некоторого провисания стрелы без негативного влияния на строящиеся конструкции, на персонал и на ход строительства, а также возможность строительства разновысотных, декоративных и выступающих конструкций.
Сочетание перемещаемых по высоте стрелы и конвейера тележки обеспечивает возможность неравномерного по высоте порядка установки строительных блоков и повышение скорости строительства.
Хотя стрела и может вертикально перемещаться, ее перемещение является относительно ресурсозатратным процессом, поэтому наличие конвейера тележки снижает число перемещений стрелы по высоте, что обеспечивает повышение скорости строительства и повышение срока службы предложенного устройства.
Исполнительные механизмы (например, механизмы, приводящие в движение те или иные элементы предложенного в настоящем изобретении устройства для возведения конструкций или выполняющие какие-либо действия – в частности, механизм поворота башни, механизм перемещения стрелы, механизм перемещения тележки, механизм перемещения корпуса конвейера тележки, устройство нанесения раствора, устройство передачи строительного блока, устройство установки строительного блока и т.д.) нуждаются в электропитании и управлении, поэтому устройство также содержит кабельную сеть (не показана на чертежах). Силовые кабели и кабели управления могут быть проложены снаружи или внутри башни, стрелы, корпуса конвейера тележки. Укладка кабелей, может производиться в гибкие или жесткие кабель-каналы, шинопроводы, кабельные цепи, кабелеукладчики, энергоцепи, кабельные траки и т.д.
В одном из вариантов осуществления кабельная сеть содержит гибкие кабель-каналы и установлена рядом с системой доставки раствора, содержащей гибкие трубопроводы, вдоль пути доставки строительного блока к устройству установки строительного блока внутри башни, стрелы и корпуса конвейера тележки. Тем самым, уменьшается требуемое пространство, упрощается техническое обслуживание, обеспечивается повышенная защита кабелей и труб. Более того, для усиления этого эффекта кабели и трубы могут быть уложены в один и тот же кабель-канал, при этом дополнительно упрощается конструкция и сборка башенного крана.
Вариант осуществления, где перемещение строительных блоков происходит внутри башни, стрелы и корпуса конвейера тележки, защищает их от случайного падения и обеспечивает дополнительное повышение безопасности строительства.
Чтобы обеспечить передачу строительных блоков вдоль системы конвейерных линий (с одного конвейера на другой), на нее (например, извне на башенный конвейер) и от нее (например, с конвейера тележки на устройство установки строительного блока), в настоящем изобретении предлагается, чтобы башня, стрела и корпус конвейера тележки содержали окна. Окно представляет собой отверстие, размер и форма которого достаточны для передачи через него строительного блока. Например, окно может быть прямоугольным отверстием в стенке башни. Также роль окон могут выполнять пустые пространства между стержнями в боковых частях фермы.
Передача строительного блока с одного конвейера на другой может выполняться, например, с помощью простого Г-образного захвата. Такой конструкции может быть вполне достаточно, так как отсутствует наклон конвейеров и строительный блок практически постоянно на пути своего перемещения расположен, по существу, параллельно земле.
Окна могут быть расположены на стороне башни, обращенной к стреле, на стороне стрелы, обращенной к конвейеру тележки, и на стороне корпуса конвейера тележки, обращенной к стреле. В таком случае стрела, перемещаясь вдоль башни, занимает положение, при котором окно на башне сопоставляется, в зависимости от конструкции, с окном на боковой стороне стреле или с окном на торце стрелы, обращенном к башне, и строительный блок беспрепятственно перемещается из окна башни в стрелу. Аналогичным образом, перемещение тележки вдоль стрелы и корпуса конвейера тележки относительно тележки выполняется таким образом, чтобы состыковать между собой окно на стреле и окно на корпусе конвейера тележки.
В настоящем изобретении обеспечивается возможность регулировки размеров окон на башне и стреле и расстояния между ними на стадии проектирования крана в зависимости от размера и формы строительного блока, от особенностей конструкции устройств передачи строительных блоков между конвейерами, от размеров, форм и особенностей конструкции самой башни, стрелы, тележки, корпуса конвейера тележки и т.д. Окна могут располагаться на одинаковом расстоянии друг от друга или на разном. Например, как показано на чертежах, по технологическим соображениям могут присутствовать промежутки, в которых окна отсутствуют – например, окно может отсутствовать в области контакта стрелы с обоймой, в области размещения привода 30 внутри стрелы, в областях крепления вантовых оттяжек к стреле и т.д. Тем не менее, это не препятствует установке строительных блоков на этих уровнях, потому что стрела, тележка и корпус конвейера тележки являются подвижными и легко компенсируют подобные промежутки. Таким образом, обеспечивается расширение возможностей использования строительных блоков различных форм и размеров, а также расширение возможностей по применению мер повышения прочности конструкции крана и крепления и защиты трубопроводных и кабельных линий, повышение безопасности строительства.
Следует отметить, что стрела имеет ограничение по минимальной высоте подъема как из-за конструкции башни, так и из-за высокой вероятности наличия препятствий у земли, но наличие вертикального конвейера тележки компенсирует этот недостаток, поэтому нет необходимости опускать стрелу слишком низко (см. пример на Фиг. 14). Кроме того, обеспечивается расширение возможностей по конструированию платформы и механизма складывания у основания башни, обеспечивается возможность нахождения персонала на земле в области охвата стрелы, а также возможность возведения конструкций начиная непосредственно с самых нижних уровней: с земли, с фундамента, с плиты и т.д.
При необходимости имеется возможность поставить несколько кранов рядом для совместной работы таким образом, что они будут частично перекрываться по области действия, но не будут мешать друг другу, потому что стрелы и конвейеры тележек регулируются по высоте.
Управление
Управление механизмами, узлами, элементами, модулями и блоками предложенного башенного крана может быть реализовано в виде полностью автономного управления, когда все действия выполняются башенным краном автоматически с использованием модуля управления (не показан на чертежах), выполняющего надлежащие программные алгоритмы управления, или частично методом дистанционного управления с участием оператора – например, когда требуется урегулировать нештатную ситуацию или когда башенный кран испытывает сложности в принятии решения.
Для повышения эффективности управления и получения обратной связи различные элементы предложенного башенного крана могут быть снабжены датчиками (не показаны на чертежах), регистрирующими те или иные параметры окружающей среды или выполняемых действий, такими как датчик натяжения каната, датчик скорости ветра (анемометр), датчик направления ветра (румбометр), датчик влажности воздуха (гигрометр), датчик температуры воздуха (термометр), гироскоп, акселерометр, магнитометр и т.д. Например, устройство установки строительного блока может содержать камеру, и автоматически анализируя изображение с камеры, модуль управления может определять точное место установки строительного блока и формировать управляющие сигналы для исполнительных механизмов, чтобы переместить и установить строительный блок с высокой точностью. Данные от датчиков могут учитываться при выполнении тех или иных действий – натяжение каната (например, для синхронизации работы приводов канатно-блочных систем удержания вантовой системы и перемещения стрелы при вертикальном перемещении стрелы), скорость ветра (например, для коррекции движений устройства установки строительного блока), температура и влажность воздуха (например, для оценки скорости застывания раствора и коррекции состава наносимого раствора) и т.д.
Модуль управления содержит процессор и память, содержащую сохраненные в ней программы и данные для управления процессами, выполняемыми при работе предложенного в настоящем изобретении башенного крана. Например, модуль управления может содержать и выполнять программу перемещения стрелы, чтобы управлять приводами канатно-блочных систем удержания вантовой системы и перемещения стрелы при вертикальном перемещении стрелы, программу складывания крана, программу раскладывания крана, программу установки строительных блоков, которая задает порядок и место установки строительных блоков, чтобы управлять перемещением строительных блоков, башни, стрелы, тележки и корпуса конвейера тележки, а также действиями устройства установки строительного блока, чтобы доставить и установить строительный блок в требуемую точку в пределах рабочего пространства.
Также модуль управления содержит средства приема сигналов с датчиков и механизмов и средства передачи сигналов для осуществления контроля и передачи команд управления. Модуль управления может быть централизованным и собирать все данные в одной точке или может быть распределенным, и в таком случае некоторые или все механизмы могут содержать собственные подмодули управления.
При необходимости некоторые или все кабели управления могут быть заменены средствами беспроводной передачи данных.
Расширенные возможности
Так как предложенное изобретение представляет собой кран, то помимо описанных выше свойств перемещения и установки строительных блоков оно фактически может сохранять в себе свойства крана и выполнять перемещение иных грузов, таких как перекрытия, традиционным методом башенного крана. Для этого тележка с конвейером тележки, устройством установки строительного блока и устройством нанесения раствора, если она используется и установлена на стреле, может смещаться в крайнее положение около башни. После этого обеспечивается возможность использования каретки для переноса грузов с использованием крюка (см. пример на Фиг. 16). Это увеличивает автоматизацию и скорость строительства и уменьшает количество требуемого дополнительного оборудования. Каретку не требуется специально устанавливать на стрелу – когда она не используется, она может находиться в крайнем положении на стреле. Для перемещения каретки может использоваться дополнительная канатно-блочная система.
При необходимости направляющие и пути перемещения для каретки и тележки могут быть сформированы без взаимного перекрытия, чтобы они не мешали друг другу. Тележка может быть установлена на боковой части стрелы и выполнена с возможностью перемещения сбоку от стрелы, а корпус конвейера тележки может быть присоединен с возможностью перемещения к раме тележки и выполнен с возможностью вертикального перемещения сбоку от стрелы. Это позволяет не только развести пути перемещения тележки и каретки, но и обеспечить возможность упрощенного складывания стрелы без демонтажа тележки и корпуса конвейера тележки.
Также возможности перемещения грузов могут быть применены для перемещения готовых модулей PPVC (предварительно собранных прошедших финишную обработку объемных конструкций) или иных подобных готовых конструкций, не требующих дополнительной обработки и позволяющих увеличить скорость строительства.
Кроме того, выше указывалось, что предложенный башенный кран может содержать систему доставки раствора. Система доставки раствора может использоваться не только для доставки и нанесения раствора на строительный блок, но и для других целей, таких как заливка полов или армопояса или 3D печать. В данных вариантах осуществления на выходе системы доставки раствора (то есть в нижней части корпуса конвейера тележки) должно располагаться соответствующее оборудование, такое как пистолет, печатающая головка и т.п. Такое оборудование может навешиваться в дополнение к имеющемуся (то есть к устройству нанесения раствора и устройству установки строительного блока) или вместо него. Смена оборудования может производиться вручную или автоматически по принципам, схожим с автоматической сменой инструмента у промышленного робота (например, с помощью магазина инструментов у робота-фрезеровщика). Таким образом, предложенный башенный кран обладает возможностью увеличения автоматизации на всех этапах строительства здания, уменьшения требуемого персонала и оборудования.
Возможны также сценарии, в которых могут быть реализованы вариации монолитно-блочного строительства. Например, монолитная часть конструкции (каркас) заливается с применением системы доставки раствора, а затем необходимые внешние и внутренние стены выкладываются из строительных блоков с применением устройства установки строительного блока. За счет перемещающихся стрелы и корпуса конвейера тележки имеется возможность укладки строительных блоков «в глубине» этажа, когда каркас уже залит и стрела должна находиться выше него.
Дополнительно система 100 для возведения конструкций может содержать автоматизированную систему 120 разгрузки фуры (см. Фиг. 15-16), которая автоматически или автоматизированно извлекает строительные блоки из грузового автомобиля и перемещает их на вход башенного крана, откуда далее они перемещаются до места укладки по системе конвейерных линий.
Таким образом, настоящее изобретение имеет конструкцию, которая позволяет с повышенной эффективностью и повышенной степенью автоматизации воплощать самые разные технологии строительства для возведения как малых, так и относительно крупных строительных форм и конструкций (в том числе многоэтажных зданий), не требуя при этом большого числа дополнительного оборудования.
Пример
Далее приводится конкретный неограничивающий пример конструкции системы строительства зданий согласно настоящему изобретению со ссылкой на Фиг. 15.
В данном примере система 100 для возведения конструкций содержит систему 120 разгрузки фуры и башенный кран 110. Система 120 разгрузки фуры выполнена в виде портального робота.
Башенный кран 110 содержит опору 1, платформу 2 с башней 3, обойму 4, установленную на башне 3, стрелу 5, присоединенную к обойме 4 и удерживаемую вантовой системой 6, присоединенной к обойме 4. Стрела 6 включает в себя переднюю и заднюю секции, шарнирно соединенные между собой и подвешенные на вантовых оттяжках. Кроме того, кран 110 содержит канатно-блочную систему 19 удержания вантовой системы, канатно-блочную систему 35 перемещения стрелы и канатно-блочную систему 60 складывания стрелы. Каждая канатно-блочная система содержит привод, канат и блоки.
Башенный кран 110 также содержит тележку 7, установленную на боковой стороне стрелы 5 с возможностью горизонтального перемещения вдоль стрелы 5, и корпус конвейера тележки, присоединенный к тележке 7 с возможностью вертикального перемещения относительно тележки 7.
Башня 3 выполнена в виде колонны прямоугольного сечения. Стрела 5 и корпус конвейера тележки также имеют прямоугольное сечение. Башня 3, стрела 5 и корпус конвейера тележки содержат продольно расположенные прямоугольные окна. Окна расположены на стороне башни, обращенной к стреле, на стороне стрелы, обращенной к конвейеру тележки, и на стороне корпуса конвейера тележки, обращенной к стреле.
Башенный кран 110 также содержит систему конвейерных линий, содержащую вертикальный башенный конвейер, установленный внутри башни, горизонтальный конвейер стрелы, установленный внутри стрелы, и вертикальный конвейер тележки, установленный внутри корпуса конвейера тележки.
Башенный кран 110 также содержит систему доставки раствора, содержащую гибкие трубопроводы, и кабельную сеть, содержащую силовые кабели и кабели управления. Кабели и трубопроводы уложены в гибкие кабель-каналы вдоль системы конвейерных линий.
Башенный кран 110 также содержит модуль управления, установленный в области основания башни 3, и датчики, установленные на элементах башенного крана 110, в том числе датчики натяжения канатов.
Башенный кран 110 также содержит устройство нанесения раствора и устройство установки строительного блока, присоединенные к корпусу конвейера тележки.
Башенный кран 110 доставляется в сложенном виде (Фиг. 12) с помощью грузового автомобиля в точку его установки, подключается к питанию. После этого кран автоматически (под наблюдением оператора) с помощью канатно-блочной-системы 55 удержания башни выполняет подъем башни из горизонтального в вертикальное положение (Фиг. 11) и фиксирует башню на платформе с помощью устройства 54 фиксации башни. Затем выполняется установка противовеса на платформу. После этого кран автоматически (под наблюдением оператора) с помощью канатно-блочной системы 19 удержания вантовой системы и канатно-блочной системы 60 складывания стрелы выполняет разворачивание стрелы в горизонтальное положение и принимает рабочее положение. Тележка 7 и корпус конвейера тележки не препятствуют процессу раскладывания крана, так как установлены сбоку от стрелы. Также для обеспечения возможности перемещения стрелы по вертикали выполняется раскрепление обоймы от стрелы с помощью устройства 49 фиксации обоймы.
Фура со строительными блоками заводится в систему 120 разгрузки фуры. Портальный робот извлекает строительные блоки из фуры и перемещает их на вход системы конвейерных линий у основания башни.
Чтобы обеспечить доставку строительного блока в нужную точку рабочего пространства, башня выполняет необходимый поворот на поворотной платформе, стрела, перемещаясь вдоль башни на необходимую высоту с помощью канатно-блочной системы 19 удержания вантовой системы и канатно-блочной системы 35 перемещения стрелы, занимает положение, при котором ближайшее верхнее окно на башне сопоставляется с окном на торце стрелы, тележка перемещается вдоль стрелы и корпус конвейера тележки перемещается относительно тележки таким образом, чтобы состыковать между собой ближайшее к необходимой точке окно на стреле и окно на корпусе конвейера тележки.
Система конвейерных линий перемещает строительный блок до выхода у устройства установки строительного блока. В частности, вертикальный башенный конвейер, приняв строительный блок на входе у основания башни, перемещает его до высоты, на которой расположена стрела; затем с помощью Г-образного захвата строительный блок перемещается через окно на башне во внутреннее пространство стрелы на горизонтальный конвейер стрелы; конвейер стрелы перемещает строительный блок до уровня тележки; затем с помощью Г-образного захвата строительный блок перемещается через окно на стреле и окно на корпусе конвейера тележки на конвейер тележки; конвейер тележки перемещает строительный блок до выхода.
Устройство нанесения раствора наносит раствор, полученный через систему доставки раствора, на строительный блок перед его установкой на возводимую конструкцию.
Устройство установки строительного блока захватывает строительный блок и затем устанавливает строительный блок, на который нанесен раствор, в необходимое положение с необходимой ориентацией на возводимую конструкцию. Перед этим при необходимости башня, стрела, тележка и корпус конвейера тележки могут выполнить дополнительные перемещения, чтобы устройство установки строительного блока могло установить строительный блок в нужную точку.
Пока выполняется нанесение раствора и установка одного строительного блока, конвейеры могут отрабатывать для перемещения других строительных блоков.
Плиты перекрытий и другие необходимые грузы перемещаются с помощью каретки 61 (Фиг. 16) и модуля управления под управлением оператора. При необходимости вместо или в дополнение к устройству установки строительного блока может использоваться печатающая головка для выполнения объемной печати.
Когда строительная конструкция возведена (например, здание построено), выполняется очистка крана, а вслед за этим складывание крана: автоматическое складывание стрелы под наблюдением оператора, демонтаж противовеса с платформы, автоматическое складывание башни под наблюдением оператора. После этого кран в сложенном состоянии готов к транспортировке.
Таким образом, предложен автоматически складывающийся и раскладывающийся башенный кран с автоматическим перемещением стрелы по вертикали. Обеспечивается ускоренное автоматическое складывание и раскладывание крана. В сложенном состоянии кран является компактным и пригоден к транспортировке грузовыми транспортными средствами традиционных размеров.
Механизмы, ответственные за складывание и раскладывание крана, не являются механизмами одной функции, которые вхолостую простаивали бы во время основной работы крана, а вместо этого вовлечены в основную работу крана для вертикального перемещения стрелы, что повышает коэффициент использования оборудования и увеличивает целесообразность его применения. Кроме того, эти механизмы имеют такие размеры и расположены таким образом, что не препятствуют работе конвейеров и прохождению по ним строительных блоков. Предложенная конструкция обеспечивает высокую полиспастность у канатно-блочных систем 19 и 35, что обеспечивает снижение нагрузки на приводы, снижение массогабаритных параметров и энергопотребления приводов, которые необходимо использовать в кране, и упрощение управления этими приводами. Кроме того, приводы размещаются вблизи друг от друга на платформе, что повышает ремонтопригодность и удобство обслуживания, а также снижает вес башни и стрелы и упрощает складывание и раскладывание крана.
В процессе вертикального перемещения стрелы башня проходит через технологический проем 12b вантовой системы, то есть предложенная конструкция вантовой системы не препятствует перемещению стрелы. При складывании и раскладывании крана вантовая система огибает оголовок башни и обойму с помощью распорок 16, откидной стойки 23 и технологического проема 12d, то есть тоже не препятствует этим процессам. В сложенном состоянии вантовая система расположена по большей части между секциями стрелы и не выступает за пределы сложенных стрелы и башни, поэтому конструкция сохраняет компактность и повышается удобство транспортировки.
В сочетании с широкими возможностями использования разных технологий строительства, таких как автоматическая укладка строительных блоков или 3D-печать, предложенный кран обеспечивает одновременно повышенный уровень автоматизации, ускорение строительства и уменьшение количества оборудования, необходимого для строительства, что ранее было недоступно в уровне техники.
Способ
Далее будет описан кратко способ вертикального перемещения стрелы складного башенного крана согласно настоящему изобретению.
Следует понимать, что данный способ соответствует вышеописанным функциям, выполняемым каждым из элементов предложенной системы 100 и башенного крана 110, и если какая-либо информация не раскрывается применительно к способу, но раскрывается применительно к системе и крану, и наоборот, то это не подразумевает, что в системе, кране или способе эта функция или этап не может выполняться, а сделано лишь для того, чтобы не загромождать описание повторением подробностей.
Способ вертикального перемещения стрелы может содержать этап, на котором выполняют подъем стрелы по вертикали, при этом с использованием модуля управления управляют приводом 36 канатно-блочной системы 35 перемещения стрелы, чтобы он увеличивал натяжение каната 37 канатно-блочной системы 35 перемещения стрелы для подъема по вертикали обоймы, подвешенной на оголовке башни, вместе со стрелой, и управляют приводом 22 канатно-блочной системы 19 удержания вантовой системы, чтобы он уменьшал натяжение каната 21 канатно-блочной системы 19 удержания вантовой системы для удержания стрелы в горизонтальном положении путем коррекции положения переднего конца стрелы с помощью его опускания.
Кроме того, способ вертикального перемещения стрелы может содержать этап, на котором выполняют опускание стрелы по вертикали, при этом с использованием модуля управления управляют приводом 36 канатно-блочной системы 35 перемещения стрелы, чтобы он уменьшал натяжение каната 37 канатно-блочной системы 35 перемещения стрелы для опускания по вертикали обоймы, подвешенной на оголовке башни, вместе со стрелой, и управляют приводом 22 канатно-блочной системы 19 удержания вантовой системы, чтобы он увеличивал натяжение каната 21 канатно-блочной системы 19 удержания вантовой системы для удержания стрелы в горизонтальном положении путем коррекции положения переднего конца стрелы с помощью его подъема.
Применение
Устройства, системы и способы согласно настоящему изобретению можно использовать для высокоавтоматизированного и даже полностью автоматического строительства зданий. Также при необходимости возможно применение настоящего изобретения в сооружении иных подходящих строительных конструкций.
Дополнительные особенности реализации
Следует понимать, что хотя в настоящем документе для описания различных элементов, компонентов, областей, слоев и/или секций могут использоваться такие термины, как "первый", "второй", "третий" и т.п., эти элементы, компоненты, области, слои и/или секции не должны ограничиваться этими терминами. Эти термины используются только для того, чтобы отличить один элемент, компонент, область, слой или секцию от другого элемента, компонента, области, слоя или секции. Так, первый элемент, компонент, область, слой или секция может быть назван вторым элементом, компонентом, областью, слоем или секцией без выхода за рамки объема настоящего изобретения. В настоящем описании термин "и/или" включает любые и все комбинации из одной или более из соответствующих перечисленных позиций. Элементы, упомянутые в единственном числе, не исключают множественности элементов, если отдельно не указано иное.
Функциональность элемента, указанного в описании или формуле изобретения как единый элемент, может быть реализована на практике посредством нескольких компонентов устройства, и наоборот, функциональность элементов, указанных в описании или формуле изобретения как несколько отдельных элементов, может быть реализована на практике посредством единого компонента.
Несмотря на то, что примерные варианты осуществления были подробно описаны и показаны на сопроводительных чертежах, следует понимать, что такие варианты осуществления являются лишь иллюстративными и не предназначены ограничивать настоящее изобретение, и что данное изобретение не должно ограничиваться конкретными показанными и описанными компоновками и конструкциями, поскольку специалисту в данной области техники на основе информации, изложенной в описании, и знаний уровня техники могут быть очевидны различные другие модификации и варианты осуществления изобретения, не выходящие за пределы сущности и объема данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| БАШЕННЫЙ КРАН И СПОСОБ ДЛЯ ВОЗВЕДЕНИЯ КОНСТРУКЦИЙ С ПОМОЩЬЮ СТРОИТЕЛЬНЫХ БЛОКОВ | 2023 |
|
RU2813384C1 |
| БАШЕННЫЙ КРАН | 2011 |
|
RU2492132C2 |
| Башенный кран | 1985 |
|
SU1388382A1 |
| БАШЕННЫЙ КРАН | 2003 |
|
RU2249559C1 |
| БАШЕННЫЙ КРАН | 2006 |
|
RU2307783C1 |
| БАШЕННЫЙ КРАН | 1999 |
|
RU2166471C2 |
| БИБЛИОТЕКА | 1973 |
|
SU364551A1 |
| БАШЕННЫЙ КРАН И СПОСОБ ЕГО МОНТАЖА | 2008 |
|
RU2371374C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕВОДА АВТОМОБИЛЬНОГО БАШЕННОГО КРАНА ИЗ:ТРАНСПОРТНОГО ПОЛОЖЕНИЯ В РАБОЧЕЕ | 1972 |
|
SU433094A1 |
| БАШЕННЫЙ КРАН | 2003 |
|
RU2254285C2 |
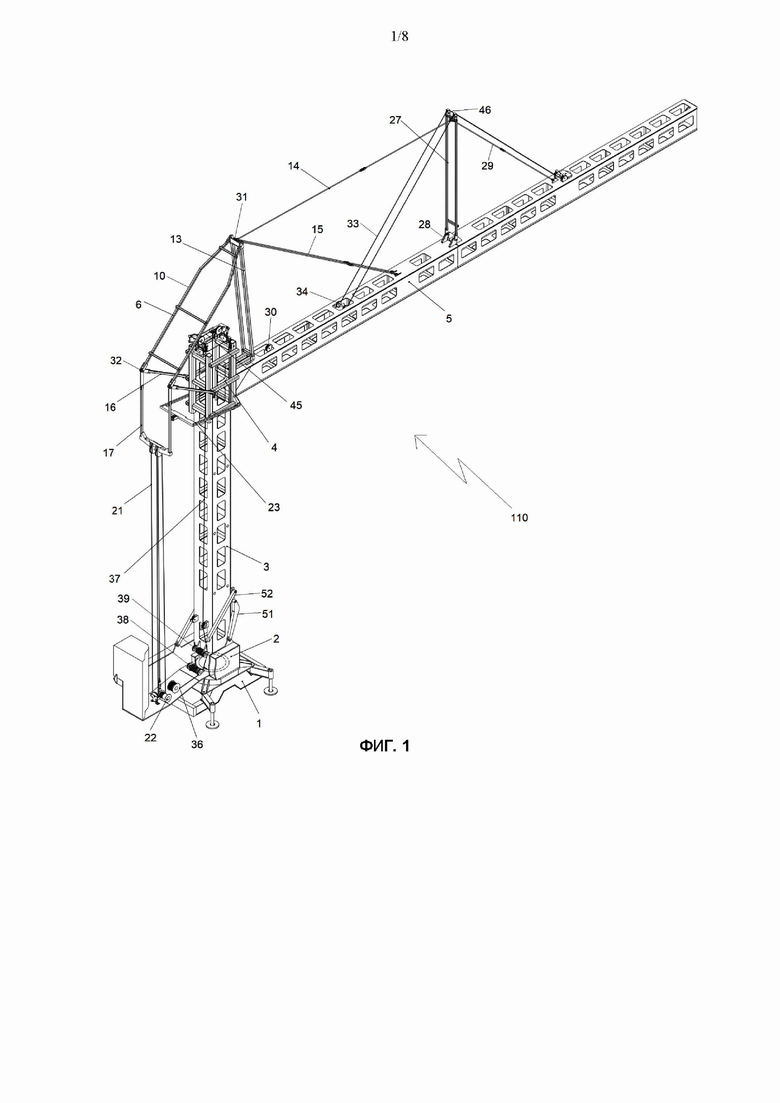
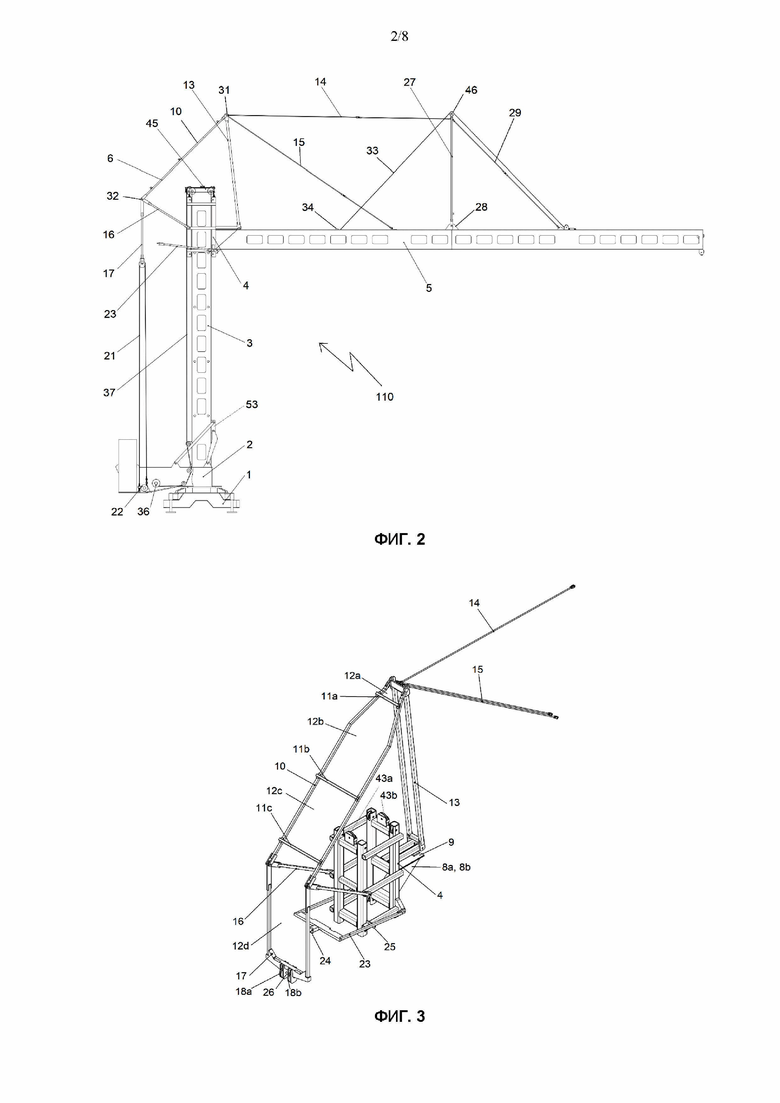


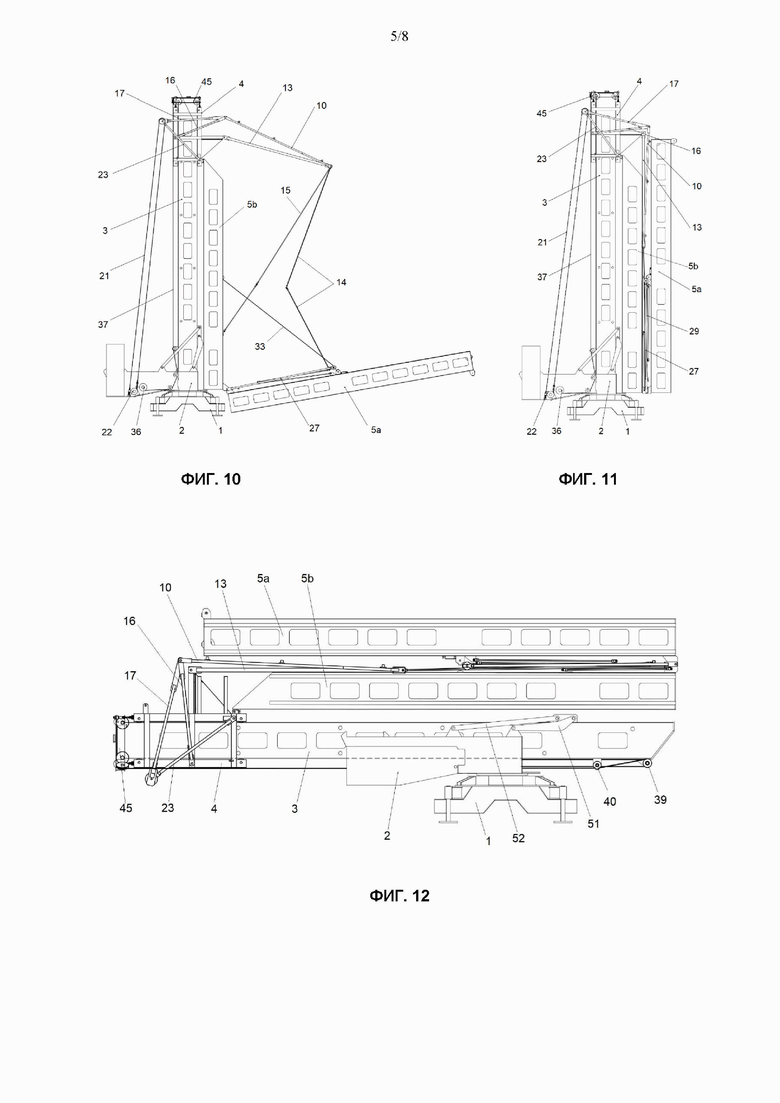
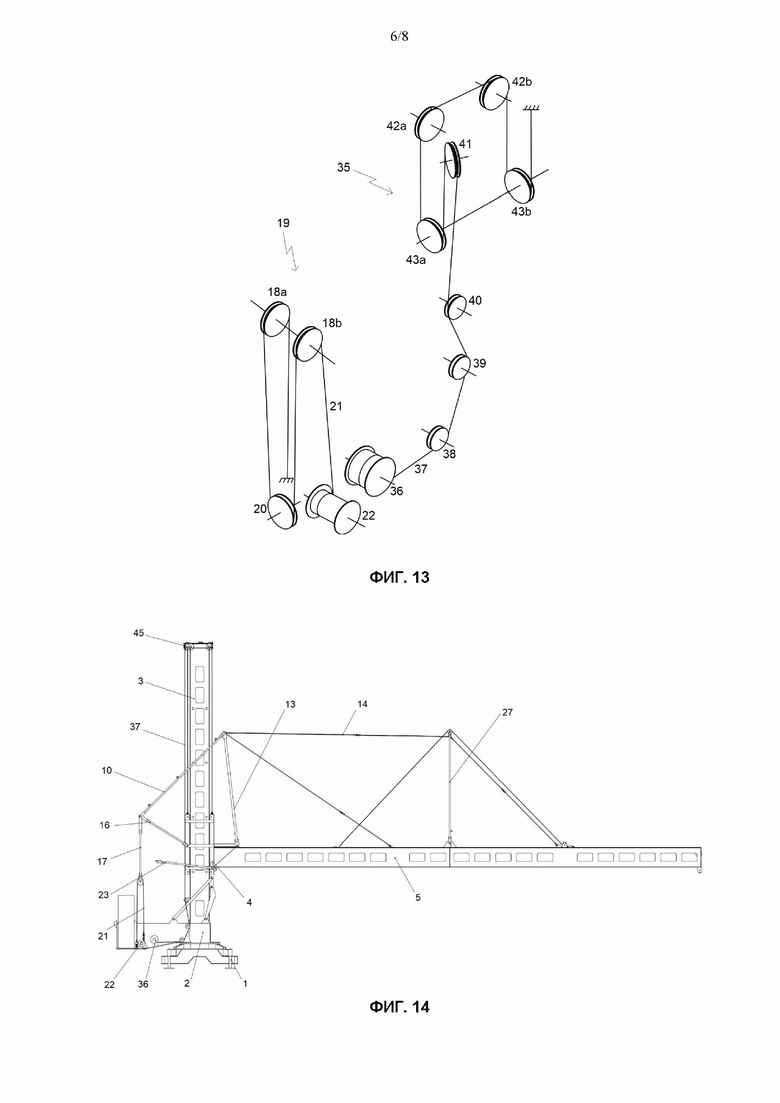

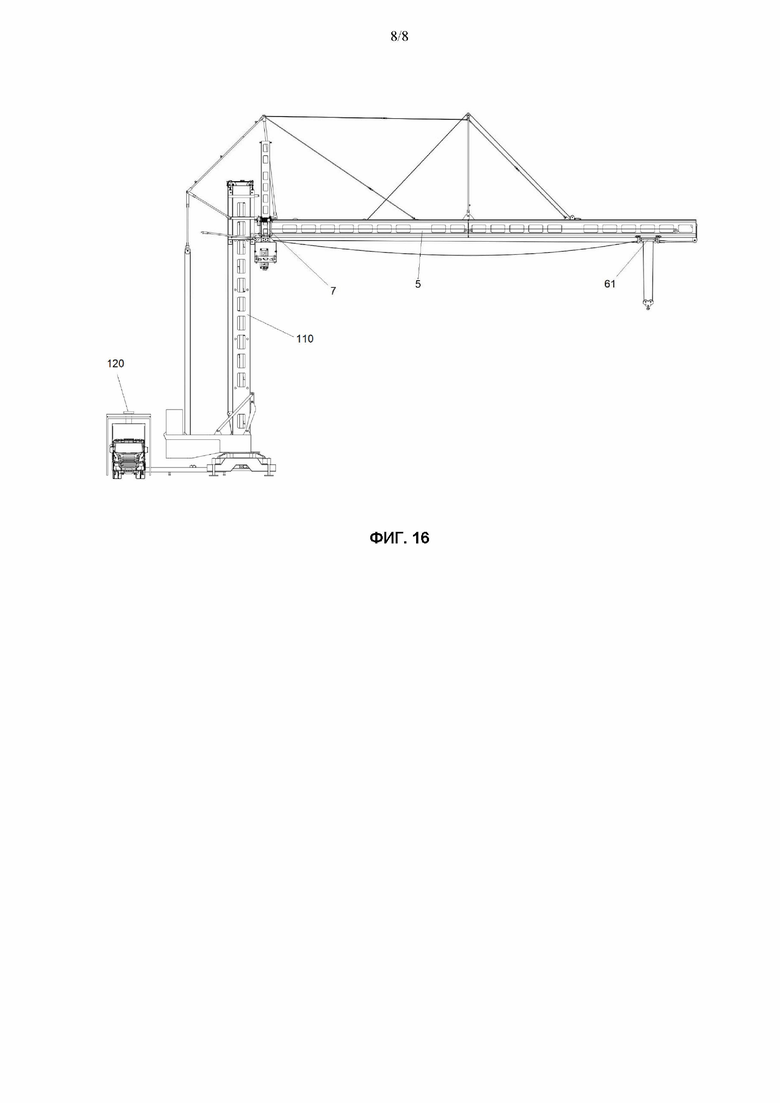
Изобретение относится к строительству, в частности к складному башенному крану и способу вертикального перемещения стрелы. Складной башенный кран содержит платформу с башней, обойму, установленную на башне с возможностью вертикального перемещения вдоль нее, складную вантовую систему, присоединенную к обойме, стрелу, одним концом присоединенную к обойме с возможностью складывания относительно нее, причем стрела подвешена на вантовой системе, систему удержания вантовой системы, содержащую первый привод, расположенный на платформе, и первый канат, который соединяет первый привод с вантовой системой, канатно-блочную систему перемещения стрелы, содержащую второй привод, расположенный на платформе, второй канат и по меньшей мере один блок. Второй канат соединяет второй привод с обоймой через упомянутый по меньшей мере один блок, расположенный на оголовке башни. Обойма подвешена на оголовке башни с помощью упомянутого по меньшей мере одного блока. Модуль управления выполнен с возможностью управления первым приводом и вторым приводом для одновременного удержания стрелы в горизонтальном положении с помощью первого привода при перемещении стрелы по вертикали с помощью второго привода. Достигается повышение эффективности систем для строительства, в том числе повышение автоматизации и скорости строительства. 2 н. и 7 з.п. ф-лы, 16 ил.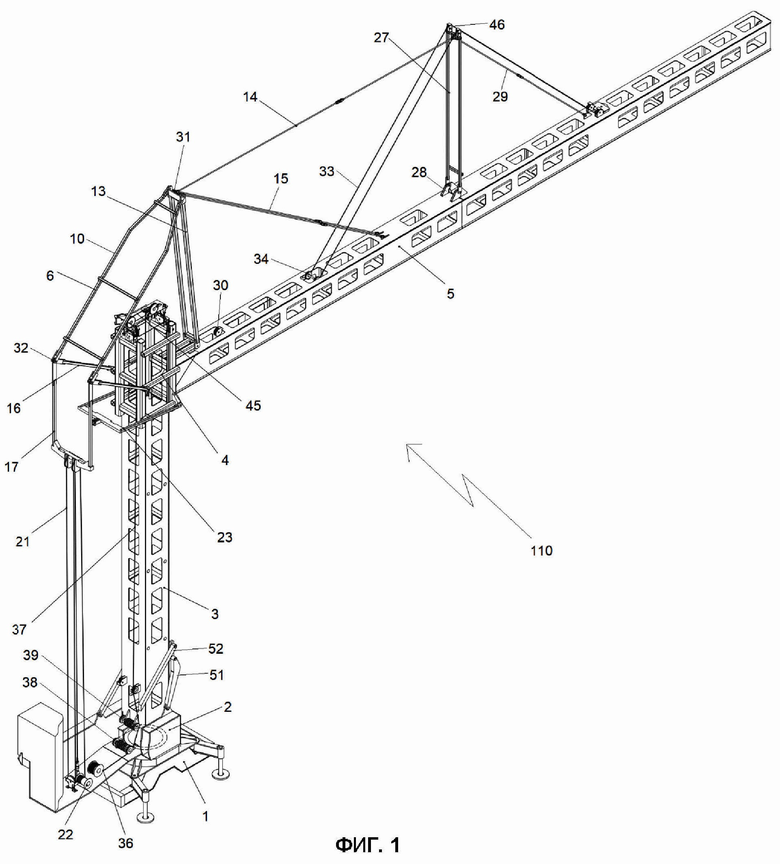
1. Складной башенный кран с перемещающейся по вертикали стрелой, содержащий:
платформу с башней;
обойму, установленную на башне с возможностью вертикального перемещения вдоль нее;
складную вантовую систему, присоединенную к обойме;
стрелу, одним концом присоединенную к обойме с возможностью складывания относительно нее, причем стрела подвешена на вантовой системе;
систему удержания вантовой системы, содержащую первый привод, расположенный на платформе, и первый канат, который соединяет первый привод с вантовой системой;
канатно-блочную систему перемещения стрелы, содержащую второй привод, расположенный на платформе, второй канат и по меньшей мере один блок, причем второй канат соединяет второй привод с обоймой через упомянутый по меньшей мере один блок, расположенный на оголовке башни, причем обойма подвешена на оголовке башни с помощью упомянутого по меньшей мере одного блока; и
модуль управления, выполненный с возможностью управления первым приводом и вторым приводом для одновременного удержания стрелы в горизонтальном положении с помощью первого привода при перемещении стрелы по вертикали с помощью второго привода.
2. Кран по п. 1, в котором для подъема стрелы по вертикали модуль управления выполнен с возможностью управления вторым приводом, чтобы он увеличивал натяжение второго каната для подъема по вертикали обоймы, подвешенной на оголовке башни, вместе со стрелой, и управления первым приводом, чтобы он уменьшал натяжение первого каната для удержания стрелы в горизонтальном положении путем опускания переднего конца стрелы.
3. Кран по п. 1, в котором модуль управления выполнен с возможностью управления первым приводом и вторым приводом на основе данных о натяжении канатов от датчиков натяжения канатов и/или данных о скорости намотки/размотки канатов и длине размотанной части канатов от энкодеров.
4. Кран по п. 1, в котором система удержания вантовой системы дополнительно содержит по меньшей мере один первый блок, причем первый канат соединяет первый привод с вантовой системой через по меньшей мере один первый блок, расположенный на вантовой системе.
5. Кран по п. 1, в котором стрела содержит две секции, которые соединены между собой с возможностью складывания друг относительно друга.
6. Кран по п. 5, в котором вантовая система содержит среднюю стойку, одним концом шарнирно присоединенную к обойме, а другим концом шарнирно присоединенную к задней и верхней вантовым оттяжкам;
вантовая система дополнительно содержит переднюю стойку, одним концом шарнирно присоединенную к узлу соединения секций стрелы, а другим концом шарнирно присоединенную к верхней вантовой оттяжке и к передней вантовой оттяжке;
передняя секция стрелы подвешена на передней вантовой оттяжке;
задняя секция стрелы подвешена на задней вантовой оттяжке.
7. Кран по п. 1, дополнительно содержащий канатно-блочную систему складывания стрелы, содержащую третий привод, расположенный на стороне одной секции стрелы, третий канат и по меньшей мере один третий блок, причем третий канат соединяет третий привод с другой секцией стрелы через по меньшей мере один третий блок, расположенный на передней вантовой оттяжке.
8. Кран по п. 1, в котором вантовая система содержит среднюю стойку, первым концом шарнирно присоединенную к обойме, распорки, первым концом шарнирно присоединенные к обойме, и поворотную рамку, первым концом шарнирно присоединенную ко второму концу средней стойки, а вторым концом шарнирно присоединенную ко вторым концам распорок, и заднюю стойку, первым концом шарнирно присоединенную к поворотной рамке, а вторым концом присоединенную к первому приводу через первый канат, причем поворотная рамка содержит проем, достаточный для прохождения сквозь него башни при перемещении стрелы по вертикали.
9. Способ вертикального перемещения стрелы складного башенного крана по п. 1, содержащий этапы, на которых:
выполняют подъем стрелы по вертикали, при этом с использованием модуля управления управляют вторым приводом, чтобы он увеличивал натяжение второго каната для подъема по вертикали обоймы, подвешенной на оголовке башни, вместе со стрелой, и управляют первым приводом, чтобы он уменьшал натяжение первого каната для удержания стрелы в горизонтальном положении путем опускания переднего конца стрелы, или
выполняют опускание стрелы по вертикали, при этом с использованием модуля управления управляют вторым приводом, чтобы он уменьшал натяжение второго каната для опускания по вертикали обоймы, подвешенной на оголовке башни, вместе со стрелой, и управляют первым приводом, чтобы он увеличивал натяжение первого каната для удержания стрелы в горизонтальном положении путем подъема переднего конца стрелы.
| EP 3816091 B1, 11.10.2023 | |||
| CN 101962156 B, 04.04.2012 | |||
| DE 102008038775 A1, 25.02.2010 | |||
| СКЛАДНАЯ МАЧТА ИЗ ТРЕХ ЭЛЕМЕНТОВ С УСТРОЙСТВОМ СКЛАДЫВАНИЯ И РАСКЛАДЫВАНИЯ ДЛЯ БАШЕННОГО КРАНА | 1998 |
|
RU2193007C2 |

