Область техники
[0001] Настоящее изобретение относится к области навигационных технологий и, в частности, к способам, системам и устройствам, учитывающим дорожную ситуацию по конкретным маневрам на маршруте при построении оптимального маршрута или при определении времени до конца маршрута.
Уровень техники
[0002] Из предшествующего уровня техники известны различные навигационные приложения (Google Maps, Apple Maps, Яндекс Карты и Навигатор), которые предоставляют пользователям как маршруты, так и прогнозы времени движения по маршруту с учетом или без учета пробок. Эти приложения отображают оптимальный для пользователя маршрут и обычно дополнительно показывают на построенном маршруте дорожную ситуацию. Существует технологическая проблема, что на перекрестках, съездах и других развязках, время проезда которых зависит от совершаемых на них маневров, прогноз по маршруту иногда может значительно ошибаться. Это происходит из-за того, что обычно алгоритмом считаются общие пробки и для тех, кто совершает первый маневр, разрешенный на определенном участке дороги, и для тех, кто совершает любой другой маневр, разрешенный этом участке дороги. В качестве неограничивающего примера, для некоторого участка дороги, на котором разрешен как проезд прямо, так и поворот направо, известные способы расчета пробок обычно будут считать общие пробки и для тех, кто стоит в очереди на поворот, и для тех, кто свободно проезжает прямо. То есть для одной дороги, например, с несколькими полосами движения могут учитываться, упрощенно говоря, обобщенные сигналы от пользователей.
[0003] Описанную выше технологическую проблему можно попытаться решить установкой на всех зависящих от маневров участках дороги (перекрестках, съездах и т.д.) дорожных камер, отслеживающих текущую дорожную ситуацию, или привязкой данных местоположений (например, GNSS (GPS, ГЛОНАСС, Beidou, Galileo, DORIS, IRNSS, QZSS) сигналов и т.п.) к соответствующей полосе на определенном участке дороги для последующего анализа и учета данных местоположений по конкретным полосам или наборам полос. Тем не менее в первом случае требуются значительные затраты на оборудование, а во втором случае существует технологическая проблема неточного прогнозирования пробок при анализе данных местоположений, поскольку: (i) трудно привязать конкретные показания данных местоположений (т.е. данных о текущих и предыдущих проездах движущихся объектов по маршруту) к конкретной полосе движения дороги, и (ii) время проезда по меньшей мере одного участка дороги с по меньшей мере двумя полосами движения и соответствующими разрешенными маневрами (например проезд прямо из левой полосы и поворот направо из правой полосы) может существенно отличаться в зависимости от текущей дорожной ситуации и того, с каким маневром этот участок дороги проезжают.
[0004] В качестве ближайшего уровня техники может быть рассмотрена патентная заявка США 16/272,726, опубликованная 13.08.2020 как US 2020/258381 A1 (HERE Global B.V.). В заявке ‘726 раскрыто прогнозирование дорожного трафика на уровне полос движения (см. название). Для этого в заявке ‘726 строят дорожный граф, в который включают все возможные участки дорог со всеми разрешенными маневрами. Для этого каждый участок дороги, если он многополосный, разделяют на полосы и указывают для каждой полосы все разрешенные с нее маневры (см. фигуру 4 и абзац [0039] описания). Затем уровень трафика по полосе, когда он необходим, прогнозируют на основе исторических данных по определенному участку/полосе построенного графа (см. абзац [0048] описания).
[0005] Однако нигде в заявке ‘726 не раскрываются и не предполагаются по меньшей мере следующие технические особенности изобретения по настоящей патентной заявке РФ: (1) поиск зависящих от маневров участков дороги, на которых разрешены по меньшей мере два маневра и время проезда/скорость объекта на которых отличается в зависимости от того, какой из упомянутых по меньшей мере двух маневров на каждом из них совершается и, как следствие вышеупомянутого, нигде в этой заявке не раскрывается и не предполагается (2) определение, на основе наиболее актуальных данных, среднего времени проезда/средней скорости объекта на каждом из имеющихся на маршруте, зависящих от маневров участков дороги с учетом маневра, который должен быть совершен на соответствующем участке дороги для следования по построенному маршруту.
[0006] Указанные выше технические особенности изобретения по настоящей патентной заявке РФ обеспечивают более точное определение времени до конца маршрута и снижение вычислительной нагрузки в сравнении с указанным выше решением ближайшего уровня техники. Более точное определение времени до конца маршрута достигается за счет учета дорожного трафика по конкретным совершаемым на маршруте маневрам только на тех участках дороги, на которых в настоящее время, если судить по наиболее актуальным данным, наблюдается различие в характеристике интенсивности движения (выражаемой через среднее время проезда, среднюю скорость объекта на участке дороги и т.д.) на данном участке дороги в зависимости от совершаемого на нем маневра. Таким образом, в настоящем изобретении любое событие (например, дорожно-транспортное происшествие, перекрытие дороги, выпадение осадков и т.д.), влекущее за собой замедление интенсивности движения будет учитываться при определении времени до конца маршрута, т.е. не будет зависеть от того, просчитывалось ли такое состояние этого участка/полосы статистически для отражения в основанной на исторических данных предыдущей модели движения как в заявке ‘726 (см., например, абзац [0049] описания).
[0007] Снижение вычислительной нагрузки в настоящем изобретении достигается за счет выполнения поиска зависящих от маневров участков дороги на маршруте, т.е. обработка всего дорожного графа для просчета состояний всех его участков дороги и их частотностей, как в заявке ‘726, в настоящем изобретении избегается. Кроме того, в настоящем изобретении такой поиск основан исключительно на простом, исходя из сложности вычисления, различии в характеристике интенсивности движения при совершении на определенном участке дороги разрешенных маневров, т.е. просчет всех состояний участков дороги с помощью достаточно сложных статистических алгоритмов, как в заявке ‘726, в настоящем изобретении избегается.
Сущность изобретения
[0008] Описанные выше технические преимущества и другие явно не указанные технические преимущества настоящего изобретения реализуются в полной мере при осуществлении изобретения, заявленного в формуле настоящего изобретения, на практике. Таким образом, в соответствии с первым аспектом настоящего изобретения обеспечен реализуемый компьютером способ учета дорожного трафика и маневров движущегося объекта при определении времени до конца маршрута, включающий в себя этапы, на которых: осуществляют поиск для предопределенной территориальной области зависящих от маневров участков дороги, на которых разрешены по меньшей мере два маневра и время проезда которых отличается в зависимости от того, какой из упомянутых по меньшей мере двух маневров на каждом из них совершается; принимают запрос на построение маршрута, проходящего через упомянутую предопределенную территориальную область; строят маршрут; обнаруживают все имеющиеся на маршруте, зависящие от маневров участки дороги; определяют среднее время проезда каждого из обнаруженных имеющихся на маршруте, зависящих от маневров участков дороги с учетом маневра, который должен быть совершен на соответствующем участке дороги для следования по построенному маршруту, при этом такое среднее время проезда определяется на основе наиболее актуальных данных о времени проезда за предопределенный промежуток времени, выводимых из данных местоположений от множества объектов, которые ранее совершили аналогичный маневр на данном участке дороги; и определяют среднее время проезда всех остальных имеющихся на маршруте участков дороги на основе наиболее актуальных данных о времени проезда за предопределенный промежуток времени, выводимых из данных местоположений от множества объектов, которые ранее проехали данный участок дороги; и передают построенный маршрут, включающий в себя среднее время проезда каждого участка дороги на этом маршруте.
[0009] В соответствии со вторым аспектом настоящего изобретения обеспечен реализуемый компьютером способ учета дорожного трафика и маневров движущегося объекта при определении времени до конца маршрута, включающий в себя этапы, на которых: принимают запрос на построение маршрута, проходящего через предопределенную территориальную область; строят маршрут; осуществляют поиск на маршруте зависящих от маневров участков дороги, на которых разрешены по меньшей мере два маневра и время проезда которых отличается в зависимости от того, какой из упомянутых по меньшей мере двух маневров на каждом из них совершается; определяют среднее время проезда каждого найденного зависящего от маневра участка дороги, учитывая маневр, который должен быть совершен на этом участке дороги для следования по построенному маршруту, при этом такое среднее время проезда определяется на основе наиболее актуальных данных о времени проезда за предопределенный промежуток времени, выводимых из данных местоположений от множества объектов, которые ранее совершили аналогичный маневр на данном участке дороги; и определяют среднее время проезда всех остальных имеющихся на маршруте участков дороги на основе наиболее актуальных данных о времени проезда за предопределенный промежуток времени, выводимых из данных местоположений от множества объектов, которые ранее проехали данный участок дороги; и передают построенный маршрут, включающий в себя среднее время проезда каждого участка дороги на этом маршруте.
[0010] В соответствии с третьим аспектом настоящего изобретения обеспечен реализуемый компьютером способ построения маршрута с учетом дорожного трафика и маневров движущегося объекта, включающий в себя этапы, на которых: осуществляют поиск зависящих от маневров участков дороги, на которых разрешены по меньшей мере два маневра и время проезда которых отличается в зависимости от того, какой из упомянутых по меньшей мере двух маневров совершается; принимают запрос на построение маршрута; строят множество маршрутов - кандидатов, для каждого маршрута - кандидата из упомянутого множества маршрутов - кандидатов: обнаруживают все зависящие от маневров участки дороги, имеющиеся на маршруте - кандидате; выводят среднее время проезда каждого из обнаруженных зависящих от маневров участков дороги с учетом маневра, который должен быть совершен на этом участке дороги для следования по построенному маршруту - кандидату, из данных местоположений от объектов, ранее совершивших за предопределенный промежуток времени аналогичный маневр на данном участке дороги; выводят среднее время проезда всех остальных имеющихся на маршруте - кандидате участков дороги из данных местоположений от объектов, ранее проехавших данный участок дороги; и агрегируют время проезда всех имеющихся на маршруте - кандидате участков дороги; передают, в качестве построенного маршрута, тот маршрут - кандидат, который обладает минимальным агрегированным временем проезда всех имеющихся на маршруте - кандидате участков дороги, а также среднее время проезда каждого участка дороги на этом маршруте.
[0011] В соответствии с четвертым аспектом настоящего изобретения обеспечен реализуемый компьютером способ построения маршрута с учетом дорожного трафика и маневров движущегося объекта, включающий в себя этапы, на которых: осуществляют поиск зависящих от маневров участков дороги, на которых разрешены по меньшей мере два маневра и время проезда которых отличается в зависимости от того, какой из упомянутых по меньшей мере двух маневров совершается; принимают запрос на построение маршрута; строят множество маршрутов - кандидатов, для каждого маршрута - кандидата из упомянутого множества маршрутов - кандидатов: обнаруживают все зависящие от маневров участки дороги, имеющиеся на маршруте - кандидате; выводят среднюю скорость объекта на каждом из обнаруженных зависящих от маневров участков дороги с учетом маневра, который должен быть совершен на этом участке дороги для следования по построенному маршруту - кандидату, из данных местоположений от объектов, ранее совершивших за предопределенный промежуток времени аналогичный маневр на данном участке дороги; выводят среднюю скорость объекта на всех остальных имеющихся на маршруте - кандидате участках дороги из данных местоположений от объектов, ранее проехавших данный участок дороги; и получают усредненную скорость объекта по всем имеющимся на маршруте - кандидате участкам дороги; передают, в качестве построенного маршрута, тот маршрут - кандидат, который обладает максимальной усредненной скоростью объекта, а также среднюю скорость объекта на каждом участке дороги на этом маршруте.
[0012] В соответствии с пятым аспектом настоящего изобретения обеспечена реализуемая компьютером навигационная система, учитывающая дорожный трафик и маневры движущихся объектов, включающая в себя: один или более компьютеров, каждый из которых содержит память, хранящую исполняемые процессором инструкции, блок связи, выполненный с возможностью осуществления связи с электронными устройствами пользователей, и процессор, выполненный с возможностью исполнения упомянутых исполняемых процессором инструкций для выполнения способа в соответствии с любым из первого аспекта, второго аспекта, третьего аспекта или четвертого аспекта настоящего изобретения; причем память дополнительно выполнена с возможностью хранения регулярно обновляемого дорожного графа, регулярно обновляемых зависящих/не зависящих от маневров участков дороги и исторических данных местоположений электронных устройств пользователей; причем блок связи выполнен с возможностью приема от электронных устройств пользователей запросов на построение/обновление маршрутов и данных местоположений электронных устройств, и передачи на соответствующие электронные устройства пользователей, в ответ на соответствующие запросы на построение/обновление маршрутов, построенные/обновленные маршруты, в том числе среднее время проезда или среднюю скорость объекта на каждом участке дороги для каждого маршрута.
[0013] В соответствии с шестым аспектом настоящего изобретения обеспечено электронное устройство пользователя для осуществления навигации по маршруту, содержащее процессор, память, экран и блок связи, причем блок связи выполнен с возможностью передачи в реализуемую компьютером навигационную систему вводимого пользователем запроса на построение/обновление маршрута, проходящего через предопределенную территориальную область и содержащего по меньшей мере начальную точку маршрута и конечную точку маршрута, и приема от упомянутой системы построенного/обновленного маршрута, включающего в себя среднее время проезда или среднюю скорость объекта на каждом не зависящем от маневра участке дороги и каждом зависящем от маневра участке дороги на этом маршруте; память выполнена с возможность хранения построенного/обновленного маршрута и дорожной карты для упомянутой предопределенной карты территориальной области; и процессор выполнен с возможностью обработки построенного/обновленного маршрута и дорожной карты для представления на экране построенного/обновленного маршрута на карте, причем каждый не зависящий от маневра участок дороги построенного/обновленного маршрута представляют на карте на основе соответствующего среднего времени проезда или средней скорости объекта на этом участке дороги, а каждый зависящий от маневра участок дороги построенного/обновленного маршрута представляют на карте на основе соответствующего среднего времени проезда или средней скорости объекта, определенного/определенной с учетом маневра, подлежащего совершению на этом участке дороги для следования по маршруту.
[0014] Другие аспекты настоящего изобретения и дополнительные варианты осуществления настоящего изобретения в аспектах с первого по шестой, а также другие связанные с настоящим изобретением детали будут понятны обычному специалисту в данной области при ознакомлении с нижеследующим подробным описанием и иллюстративными чертежами.
Краткое описание чертежей
[ФИГ. 1] Фиг. 1 иллюстрирует блок-схему последовательности этапов реализуемого компьютером способа учета дорожного трафика и маневров движущегося объекта при определении времени до конца маршрута согласно первому аспекту настоящего изобретения.
[ФИГ. 2] Фиг. 2 иллюстрирует блок-схему последовательности этапов реализуемого компьютером способа учета дорожного трафика и маневров движущегося объекта при определении времени до конца маршрута согласно второму аспекту настоящего изобретения.
[ФИГ. 3] Фиг. 3 иллюстрирует блок-схему последовательности этапов способа построения маршрута с учетом дорожного трафика и маневров движущегося объекта согласно третьему аспекту настоящего изобретения.
[ФИГ. 4] Фиг. 4 иллюстрирует блок-схему последовательности этапов способа построения маршрута с учетом дорожного трафика и маневров движущегося объекта согласно четвертому аспекту настоящего изобретения.
[ФИГ. 5] Фиг. 5 иллюстрирует схематичное представление реализуемой компьютером навигационной системы, учитывающей дорожный трафик и маневры движущихся объектов согласно пятому аспекту настоящего изобретения.
[ФИГ. 6] Фиг. 6 иллюстрирует схематичное представление электронного устройства пользователя для осуществления навигации по маршруту согласно шестому аспекту настоящего изобретения.
[ФИГ. 7] Фиг. 7 иллюстрирует примеры представлений одного и того же участка дороги на экранах электронных устройств пользователей в зависимости от маршрутов, по которым осуществляется движение.
[ФИГ. 8] Фиг. 8 иллюстрирует первый вариант осуществления этапа S105 поиска для предопределенной территориальной области зависящих от маневров участков дороги.
[ФИГ. 9] Фиг. 9 иллюстрирует второй вариант осуществления этапа S105 поиска для предопределенной территориальной области зависящих от маневров участков дороги.
[ФИГ. 10] Фиг. 10 иллюстрирует третий вариант осуществления этапа S105 поиска для предопределенной территориальной области зависящих от маневров участков дороги.
[ФИГ. 11] Фиг. 11 иллюстрирует четвертый вариант осуществления этапа S105 поиска для предопределенной территориальной области зависящих от маневров участков дороги.
Подробное описание изобретения
[0015] На фиг. 1 проиллюстрирован реализуемый компьютером способ учета дорожного трафика и маневров движущегося объекта (например, транспортного средства или электронного устройства пользователя, находящегося в движущемся транспортном средстве) при определении времени до конца маршрута согласно первому аспекту настоящего изобретения. Способ начинается с выполнения этапа S105, на котором осуществляют поиск для предопределенной территориальной области зависящих от маневров участков дороги, на которых разрешены по меньшей мере два маневра и время проезда которых отличается в зависимости от того, какой из упомянутых по меньшей мере двух маневров на каждом из них совершается. Под термином “зависящий от маневра участок дороги” тут и далее понимается участок дороги с по меньшей мере двумя разрешенными маневрами (например, проезд прямо и поворот направо на перекрестке), интенсивность движения (выражаемая, например, временем проезда или скоростью объекта на данном участке) по которому различна в зависимости от того, какой из маневров на нем совершается. Таким образом, один и тот же участок дороги в один момент времени может определяться как зависящий от маневра участок дороги (когда обнаруживается упомянутое различие), а в другой момент времени (когда упомянутое различие не обнаруживается) - как не зависящий от маневра участок дороги. Участок дороги, на котором разрешен только один маневр (например, только движение вперед), не определяется в качестве зависящего от маневра участка дороги на этапе S105. Вместо этого такой участок дороги может быть определен как не зависящий от маневра участок дороги.
[0016] Зависящий от маневра участок дороги может включать в себя часть дороги некоторой протяженности до точки разъезда (например, светофора, съезда и т.д.) и, опционально, часть дороги некоторой протяженности после точки разъезда. Если часть дороги некоторой протяженности после точки разъезда включается в состав такого участка дороги, обычно протяженность этой части дороги меньше протяженности части дороги до упомянутой точки разъезда. Пример зависящего от маневра участка дороги проиллюстрирован на фиг. 7.
[0017] Протяженность как зависящего от маневра участка дороги, так и не зависящего от маневра участка дороги, строго не ограничена, она может составлять, например, 1 километр, 500 метров, 300 метров, 250 метров, 200 метров, 150 метров, 100 метров, 50 метров, 40 метров, 30 метров, 20 метров. В общем случае протяженность участка дороги может ограничиваться с одной стороны границей предыдущего участка дороги, а с другой стороны границей последующего участка дороги. В диапазоне между границей предыдущего участка дороги и границей последующего участка дороги протяженность зависящего от маневра участка дороги может определяться адаптивно как протяженность от границы начала затора из движущихся объектов, совершающих определенный маневр из по меньшей мере двух разрешенных маневров, до точки разъезда или границы последующего участка дороги.
[0018] Под термином “предопределенная территориальная область” понимается любая географическая область, для которой имеется или могут быть получены/построены карта или дорожный граф, например, одна или более стран, один или более регионов, один или более городов/сел, один или более районов, один или более округов, одна или более улиц и т.д. Кроме того, предопределенная территориальная область может подбираться таким образом, чтобы включать в себя только ту географическую область, по которой строится запрошенный маршрут от начальной точки маршрута до конечной точки маршрута. Под термином “разрешенный маневр” понимается любой маневр, разрешенный правилами дорожного движения, дорожной разметкой, сигналами светофоров, жестами регулировщика и т.д., например, проезд перекрестка прямо, поворот на перекрестке направо, поворот на перекрестке налево, разворот на перекрестке, разворот в разрешенном разметкой месте, поворот через разрешенное разметкой место, съезд на дублер, выезд с дублера, съезд на основную проезжую часть, выезд с основной проезжей части, въезд на круговое движение, выезд с кругового движения, съезд с главной дороги, выезд на главную дорогу и т.д.
[0019] Данный этап S105 может проводиться заранее, но предпочтительно выполнять данный этап в режиме реального времени или близком к реальному времени режиме на основе наиболее актуальных данных для получения наиболее точного результата. Кроме того, в некоторых вариантах осуществления настоящего изобретения для уточнения времени до конца маршрута и учета вновь собранных наиболее актуальных данных для оставшейся части маршрута данный этап и все последующие этапы (которые будут описаны ниже) может/могут выполняться на регулярной основе (например, раз в 5 минут, раз в 10 минут и т.д., без ограничения) до тех пор, пока не будет достигнута конечная точка маршрута. Под термином “наиболее актуальные данные” тут и далее понимают данные за предопределенный промежуток времени, который является ближайшим во времени к моменту исполнения раскрытого способа, например, данные за последние 5 минут - 60 минут или данные за промежуток времени в 5 минут - 60 минут в последних доступных данных.
[0020] Этап S105 может быть реализован по меньшей мере частично с использованием регулярно обновляемого дорожного графа, который построен по меньшей мере для упомянутой предопределенной территориальной области. Дорожный граф содержит множество связанных ребрами узлов, причем каждому ребру и/или каждому узлу в дорожном графе сопоставлен уникальный идентификатор. Каждый узел или ребро дорожного графа может содержать относящуюся к характеристике дороги информацию, например, но без ограничения, информацию о протяженности дороги, информацию о масштабе, информацию о разрешенной скорости, информацию о количестве полос движения, информацию о направлении движения, информацию о разметке, информацию о знаках, информацию о светофорах, информацию о дорожных работах, информацию о дорожных происшествиях, информацию о заторах, информацию о дорожных перекрытиях, информацию о наличии трамвайных путей, информацию о наличии переездов железнодорожных путей и т.д. Дорожный граф строится для предопределенной территориальной области и регулярно обновляется для добавления в него любой новой актуальной информации и исключения из него любой устаревшей информации. Вариантов осуществления этапа S105 есть несколько.
[0021] Первый вариант осуществления этапа S105, проиллюстрированный на фиг. 8, начинают с выполнения подэтапа S105.1, на котором отбирают имеющиеся на предопределенной территориальной области участки дороги - кандидаты, каждый из которых имеет по меньшей мере два разрешенных маневра. В неограничивающем примере реализации подэтап S105.1 отбора имеющихся на предопределенной территориальной области участков дороги - кандидатов может быть реализован следующей последовательностью операций: - находят, обращаясь к дорожному графу, все возможные точки разъезда, имеющиеся на предопределенной территориальной области; - в качестве участка дороги - кандидата определяют, для каждой точки разъезда, участок дороги, включающий в себя соответствующую точку разъезда и часть дороги до этой точки разъезда (т.е. находящуюся выше по ходу движения к точке разъезда) предопределенной протяженности, или, если расстояние до предыдущей точки разъезда меньше упомянутой предопределенной протяженности, часть дороги до этой предыдущей точки разъезда. Возможны другие примеры реализации данного подэтапа отбора имеющихся на предопределенной территориальной области участков дороги - кандидатов (в том числе вручную). В качестве альтернативы данный подэтап может не выполняться при каждом исполнении способа, а в качестве участков дороги - кандидатов могут использоваться участки дороги - кандидаты, отобранные ранее.
[0022] Опционально, определенный участок дороги - кандидат или отобранный ранее участок дороги - кандидат может быть дополнительно уточнен (т.е. усечен) по границе ухудшения дорожной ситуации (например, границе начала затора до точки разъезда), если такая граница ухудшения дорожной ситуации указывается наиболее актуальной и доступной в настоящий момент информацией о заторах на соответствующем участке дороги - кандидате. В других примерах определенный участок дороги - кандидат или отобранный ранее участок дороги - кандидат может уточняться на основе одного или более из текущего времени, накопленной связанной с заторами статистики. Усеченная часть дороги (до предыдущей точки разъезда) может впоследствии определяться в качестве не зависящего от маневра участка дороги.
[0023] После выполнения отбора имеющихся на предопределенной территориальной области участков дороги - кандидатов приступают к выполнению подэтапа S105.2, на котором для каждой пары маневров из по меньшей мере двух маневров, разрешенных на каждом из отобранных участков дороги - кандидатов, определяют среднее время проезда соответствующего участка дороги - кандидата с совершением первого маневра из упомянутой пары маневров и среднее время проезда этого участка дороги - кандидата с совершением второго маневра из упомянутой пары маневров. В неограничивающем примере среднее время проезда соответствующего участка дороги - кандидата с совершением первого маневра (например поворотом направо) определяется на основе наиболее актуальных данных о времени проезда за предопределенный промежуток времени, выводимых из данных местоположений от множества объектов, которые ранее совершили этот первый маневр (т.е. поворот направо) на данном участке дороги, а среднее время проезда соответствующего участка дороги - кандидата с совершением второго маневра (например проездом прямо) определяется на основе наиболее актуальных данных о времени проезда за аналогичный предопределенный промежуток времени, выводимых из данных местоположений от множества объектов, которые ранее совершили этот второй маневр (т.е. проезд прямо) на данном участке дороги. Не будет лишним отметить здесь еще раз, что указанные выше поворот направо и проезд прямо представляют собой неограничивающие примеры разрешенных маневров, а перекресток, на котором такие маневры могут быть разрешения, представляет собой лишь неограничивающий пример точки разъезда.
[0024] При определении среднего времени проезда соответствующего участка дороги - кандидата как с совершением первого маневра, так и с совершением второго маневра используют соответствующие данные за один и тот же предопределенный промежуток времени, например, за последние 5 минут (или менее) - 180 минут или за промежуток времени в 5 минут (или менее) - 180 минут в последних доступных данных. Примером данных местоположений, из которых могут выводиться наиболее актуальные данные о времени проезда, являются GNSS-сигналы, которые могут содержать любые из GPS-сигналов, ГЛОНАСС-сигналов, Beidou-сигналов, Galileo-сигналов, DORIS-сигналов, IRNSS-сигналов, QZSS-сигналов и т.д.
[0025] GNSS-сигналы могут отправляться/приниматься с определенной периодичностью, например, но без ограничения упомянутым, один раз за единицу времени, выбираемую из диапазона от 1 мкс до 3 с, и впоследствии привязываться к дорожному графу для их дальнейшей обработки. Каждый такой сигнал соответствует определенному объекту (например, содержит идентификатор объекта) и указывает его координату в определенный момент времени, но при этом является обезличенным, т.е. не содержит какой-либо информации увязывающей принадлежность характеризуемого им объекта к той или иной категории, или к тому или иному лицу. Направление движения объекта и скорость объекта могут быть определены на основе распределенной во времени последовательности из по меньшей мере двух сигналов, относящихся к этому объекту (т.е. содержащих один и тот же идентификатор соответствующего объекта). Таким образом, последовательности распределенных во времени сигналов от разных движущихся объектов являются отделимыми друг от друга и в большинстве случаев однозначно сопоставимыми с определенными совершенными на том или ином участке разрешенными маневрами за счет присвоения сигналам таких последовательностей разных обезличенных идентификаторов движущихся объектов.
[0026] В неограничивающем примере реализации подэтап S105.2 c выведением наиболее актуальных данных о времени проезда из данных местоположений может быть реализован следующей последовательностью операций: - принимают/получают множество привязанных к определенному участку дороги - кандидату GNSS-сигналов за наиболее актуальный предопределенный промежуток времени; для каждой пары маневров, разрешенных на данном участке дороги, выделяют из упомянутого множества GNSS-сигналов первое подмножество последовательностей распределенных во времени сигналов от объектов, совершивших на данном участке дороги первый разрешенный маневр, и второе подмножество последовательностей распределенных во времени сигналов от объектов, совершивших на данном участке дороги второй разрешенный маневр; и обращаясь к данным о протяженности дороги, соответствующей соответствующему участку дороги - кандидату, определяют первое среднее время проезда соответствующего участка дороги - кандидата с совершением первого маневра на основании первого подмножества и определяют второе среднее время проезда соответствующего участка дороги - кандидата с совершением второго маневра на основании второго подмножества. Среднее значение здесь и далее может вычисляться согласно любой разновидности среднего значения, например, но без ограничения упомянутым, как среднее арифметическое, среднее геометрическое, среднее квадратическое, среднее гармоническое, в том числе их взвешенные вариации.
[0027] Данные о протяженности дороги, соответствующей соответствующему участку дороги - кандидату или его части, могут получаться из содержащейся в дорожном графе относящейся к характеристике соответствующего участка дороги - кандидата информации, например, информации о протяженности дороги или информации о масштабе. Описанная выше последовательность операций может дополнительно содержать, перед операцией выделения из множества GNSS-сигналов подмножеств последовательностей распределенных во времени сигналов, операцию устранения шума из упомянутого множества GNSS-сигналов. Данная дополнительная операция может быть осуществлена для удаления любого одного или более из: - единичных сигналов, - сигналов, которые не могут быть корректно и однозначно привязаны к дорожному графу, - сигналов, которые указывают слишком быстрое движение (т.е. движение со скоростью, которая выше предопределенного порогового значения максимальной скорости), - сигналов, которые указывают слишком медленное движение (т.е. движение со скоростью, которая ниже предопределенного порогового значения минимальной скорости), сигналов, которые указывают направление движения объекта, отклоняющееся от разрешенного на участке дороги направления движения (определяемого, например, по содержащейся в дорожном графе информации о направлении движения или по усредненному направлению движения большинства объектов на данном участке дороги) более чем на предопределенное значение отклонения, и т.д.
[0028] После определения среднего времени проезда соответствующего участка дороги - кандидата с совершением первого маневра и среднего времени проезда соответствующего участка дороги - кандидата с совершением второго маневра приступают к выполнению подэтапа S105.3, на котором определяют, различаются ли среднее время проезда участка дороги - кандидата с совершением первого маневра и среднее время проезда участка дороги - кандидата с совершением второго маневра на предопределенную пороговую величину или более. Предопределенной пороговой величиной различия является 1/10, более предпочтительно 1/9, более предпочтительно 1/8, более предпочтительно 1/7, более предпочтительно 1/6, более предпочтительно 1/5, более предпочтительно 1/4, еще более предпочтительно 1/3, наиболее предпочтительно 1/2 или более в относительном или абсолютном выражении. В случае определения на подэтапе S105.3, что среднее время проезда участка дороги - кандидата с совершением первого маневра и среднее время проезда участка дороги - кандидата с совершением второго маневра различаются на предопределенную пороговую величину или более, определяют на подэтапе S105.4 данный участок дороги с соответствующими маневрами в качестве зависящего от маневра участка дороги. В случае определения на подэтапе S105.3, что среднее время проезда участка дороги - кандидата с совершением первого маневра и среднее время проезда участка дороги - кандидата с совершением второго маневра не различаются на предопределенную пороговую величину или более, определяют на подэтапе S105.4 данный участок дороги с соответствующими маневрами в качестве не зависящего от маневра участка дороги. Любой участок дороги (например, участок дороги с единственным разрешенным направлением движения/маневром), не определенный на подэтапе S105.4 как зависящий от маневра участок дороги или как не зависящий от маневра участок дороги, может определяться в качестве не зависящего от маневра участка дороги.
[0029] Информация об определенном зависящем от маневра участке дороги может заноситься в таблицу зависящих от маневров участков дороги, такая информация может включать в себя, но без ограничения, любое одно или более из времени определения, местоположения зависящего от маневра участка дороги с соответствующим маневром, направления движения по зависящему от маневра участку дороги с соответствующим маневром, среднего времени проезда данного зависящего от маневра участка дороги с соответствующим маневром. Местоположение зависящего от маневра участка дороги с соответствующим маневром и/или направление движения по зависящему от маневра участку дороги с соответствующим маневром может быть представлено в таблице в форме, например, - координат начальной точки и точки разъезда с указанием идентификатора ребра дорожного графа, на который осуществляется движение для совершения соответствующего маневра, - координат начальной точки, точки разъезда и конечной точки участка дороги, -идентификаторов, сопоставленных в дорожном графе ребру/ребрам и узлу, входящим в состав траектории соответствующего маневра, совершаемого на зависящем от маневра участке дороги. Следует отметить, что таблица не является единственно возможной формой представления указанной выше информации, в других вариантах реализации могут использоваться другие удобные формы хранения и обработки информации, которые специалистам известны. В качестве примера, но не ограничения, указанной выше информацией могут быть дополнены соответствующие ребра и узлы регулярно обновляемого дорожного графа.
[0030] Начальной точкой зависящего от маневра участка дороги может быть, без ограничения упомянутым, граница ухудшения дорожной ситуации (например, граница начала затора), граница предыдущего участка дороги, точка, находящаяся на предопределенном расстоянии (например, 10 метров, 20 метров, 30 метров, 40 метров или более) после предыдущей точки разъезда, начало дороги. Конечной точкой зависящего от маневра участка дороги может быть, без ограничения упомянутым, граница улучшения дорожной ситуации (например, граница окончания затора), находящаяся после текущей точки разъезда, граница последующего участка дороги, находящаяся после текущей точки разъезда, точка, находящаяся на предопределенном расстоянии (например, 10 метров, 20 метров, 30 метров, 40 метров или более) после текущей точки разъезда, конец дороги.
[0031] Информация об определенном не зависящем от маневра участке дороги может заноситься в таблицу не зависящих от маневров участков дороги, такая информация может включать в себя, но без ограничения, любое одно или более из времени определения, местоположения не зависящего от маневра участка дороги, направления движения по не зависящему от маневра участку дороги, среднего времени проезда данного не зависящего от маневра участка дороги. Местоположение не зависящего от маневра участка дороги и/или направление движения по не зависящему от маневра участку дороги может быть представлено в таблице в форме, например, - координат начальной точки и конечной точки, - идентификаторов, сопоставленных в дорожном графе узлу и ребру или исключительно ребру, входящим в состав соответствующего не зависящего от маневра участка дороги. Следует отметить, что таблица не является единственно возможной формой представления указанной выше информации, в других вариантах реализации могут использоваться другие удобные формы хранения и обработки информации, которые специалистам известны. В качестве примера, но не ограничения, указанной выше информацией могут быть дополнены соответствующие ребра и узлы регулярно обновляемого дорожного графа.
[0032] Начальной точкой не зависящего от маневра участка дороги может быть, без ограничения упомянутым, граница ухудшения дорожной ситуации (например, граница начала затора), граница предыдущего участка дороги, точка, находящаяся на предопределенном расстоянии (например, 10 метров, 20 метров, 30 метров, 40 метров или более) после предыдущей точки разъезда, начало дороги. Конечной точкой не зависящего от маневра участка дороги может быть, без ограничения упомянутым, граница улучшения дорожной ситуации (например, граница окончания затора), находящаяся перед текущей точкой разъезда, граница последующего участка дороги, находящаяся перед текущей точкой разъезда, точка, находящаяся на предопределенном расстоянии (например, 10 метров, 20 метров, 30 метров, 40 метров или более) перед текущей точкой разъезда, конец дороги.
[0033] Второй вариант осуществления этапа S105 проиллюстрирован на фиг. 9. Чтобы избежать повторений далее будет описана только та часть второго варианта осуществления этапа S105 и соответствующие подробности, которые отличаются от первого варианта осуществления этапа S105. Второй вариант осуществления этапа S105 начинают с выполнения подэтапа S105.11, который соответствует описанному выше подэтапу S105.1. После выполнения подэтапа S105.11 переходят к выполнению подэтапа S105.22, который отличается от описанного выше подэтапа S105.2 тем, что для каждой пары маневров из по меньшей мере двух маневров, разрешенных на каждом из отобранных участков дороги - кандидатов, определяют среднюю скорость объекта на соответствующем участке дороги - кандидате с совершением первого маневра из упомянутой пары маневров и среднюю скорость объекта на этом участке дороги - кандидате с совершением второго маневра из упомянутой пары маневров, а не среднее время проезда соответствующего участка дороги - кандидата с совершением того или иного маневра.
[0034] В неограничивающем примере реализации подэтап S105.22 c выведением наиболее актуальных данных о скорости объектов из данных местоположений может быть реализован следующей последовательностью операций: - принимают/получают множество привязанных к определенному участку дороги - кандидату GNSS-сигналов за наиболее актуальный предопределенный промежуток времени; для каждой пары маневров, разрешенных на данном участке дороги, выделяют из упомянутого множества GNSS-сигналов первое подмножество последовательностей распределенных во времени сигналов от объектов, совершивших на данном участке дороги первый разрешенный маневр, и второе подмножество последовательностей распределенных во времени сигналов от объектов, совершивших на данном участке дороги второй разрешенный маневр; и обращаясь к данным о протяженности дороги, соответствующей соответствующему участку дороги - кандидату, определяют первую среднюю скорость объекта на соответствующем участке дороги - кандидате с совершением первого маневра на основании первого подмножества и определяют вторую среднюю скорость объекта на соответствующем участке дороги - кандидате с совершением второго маневра на основании второго подмножества. Среднее значение здесь и далее может вычисляться согласно любой разновидности среднего значения, например, но без ограничения упомянутым, как среднее арифметическое, среднее геометрическое, среднее квадратическое, среднее гармоническое, в том числе их взвешенные вариации. Некоторые виды GNSS-сигналов могут непосредственно содержать данные о скорости объектов, в таком случае определение средней скорости в приведенной выше последовательности операций может осуществляться без обращения к данным о протяженности дороги, соответствующей соответствующему участку дороги - кандидату, что может в некоторой степени дополнительно снизить вычислительную сложность раскрываемого здесь способа.
[0035] После выполнения подэтапа S105.22 переходят к выполнению подэтапов S105.33, S105.44, которые отличаются от соответствующих описанных выше подэтапов S105.3, S105.4, только тем, что зависящий от маневра участок дороги (или, в противном случае, не зависящий от маневра участок дороги) определяется по различию средней скорости объекта с совершением первого маневра на участке дороги - кандидате и средней скорости объекта на этом участке дороги - кандидате с совершением второго маневра на предопределенную пороговую величину или более, а не по различию в среднем времени проезда участка дороги - кандидата с совершением того или иного маневра.
[0036] Третий вариант осуществления этапа S105 проиллюстрирован на фиг. 10. Чтобы избежать повторений далее будет описана только та часть третьего варианта осуществления этапа S105 и соответствующие подробности, которые отличаются от первого варианта осуществления этапа S105. Третий вариант осуществления этапа S105 начинают с выполнения подэтапа S105.111, который соответствует описанному выше подэтапу S105.1. После выполнения подэтапа S105.111 переходят к выполнению подэтапа S105.222, который отличается от описанного выше подэтапа S105.2 тем, что для каждой пары маневров из по меньшей мере двух маневров, разрешенных на каждом из отобранных участков дороги - кандидатов, время проезда соответствующего участка дороги - кандидата с совершением первого маневра из упомянутой пары маневров и время проезда этого участка дороги - кандидата с совершением второго маневра из упомянутой пары маневров не определяют (по наиболее актуальным текущим прошлым данным, например данным за последние два часа), а прогнозируют (по более устаревшим прошлым данным, например данным, которые были получены более двух часов назад). Граница между наиболее актуальными текущими прошлыми данными и более устаревшими прошлыми данными может определяться отличной от двух часов, например, как один час, или как три часа, или как другое значение.
[0037] Данный вариант осуществления этапа S105 может быть применен при недостаточном объеме или отсутствии актуальных данных местоположений для выведения актуальных данных о времени проезда. Таким образом, переход на выполнение этапа S105 согласно именно третьему варианту осуществления может выполняться по проверке условия на выполнение. Примерами таких условий может быть, но без ограничения упомянутым, одно из следующих условий: - является ли объем доступных данных местоположений (т.е. количество GNSS-сигналов), привязанных к конкретному участку дороги - кандидату, за наиболее актуальный предопределенный промежуток времени большим или равным пороговому значению минимального объема данных, - является ли число объектов (определяемое по GNSS-сигналам), проехавших по конкретному участку дороги - кандидату, за наиболее актуальный предопределенный промежуток времени большим или равным пороговому значению минимального числа объектов и т.д. Если объем доступных данных местоположений не является большим или равным пороговому значению минимального объема данных или если число объектов не является большим или равным пороговому значению минимального числа объектов может выполняться определение, что этап S105 следует выполнять согласно именно третьему варианту осуществления. Специалисты поймут, что приведенные выше примеры условий для перехода на выполнение этапа S105 согласно третьему варианту осуществления не следует интерпретировать в ограничивающем смысле, поскольку аналогичные по выполняемой функции, но сформулированные иным образом условия могут быть продуманы обычными специалистами без каких-либо творческих усилий, т.е. без какого-либо изобретательства.
[0038] В неограничивающем примере реализации подэтап S105.222 может быть реализован следующей последовательностью операций: - постепенно расширяют (дальше по направлению в прошлое) наиболее актуальный предопределенный промежуток времени до тех пор, пока не будет получено множество GNSS-сигналов большее или равное по объему пороговому значению минимального объема данных или пока не будет получено множество GNSS-сигналов, указывающих проезд по участку дороги - кандидату объектов в количестве, которое больше или равно пороговому значению минимального количества объектов; для каждой пары маневров, разрешенных на данном участке дороги, выделяют из упомянутого множества GNSS-сигналов первое подмножество последовательностей распределенных во времени сигналов от объектов, совершивших на данном участке дороги первый разрешенный маневр, и второе подмножество последовательностей распределенных во времени сигналов от объектов, совершивших на данном участке дороги второй разрешенный маневр; и обращаясь к данным о протяженности дороги, соответствующей соответствующему участку дороги - кандидату, прогнозируют первое время проезда соответствующего участка дороги - кандидата с совершением первого маневра на основании первого подмножества и прогнозируют второе время проезда соответствующего участка дороги - кандидата с совершением второго маневра на основании второго подмножества.
[0039] Непосредственно операция прогнозирования в описанной выше последовательности операций примера реализации подэтапа S105.222 может выполняться как, например, простое усреднение, взвешенное усреднение, как прогнозирование с помощью модели машинного обучения на основе случайного леса решающих деревьев или на основе градиентного бустинга решающих деревьев, или как прогнозирование с помощью нейросетевой модели. Простое усреднение может вычисляться согласно любой разновидности среднего значения, например, но без ограничения упомянутым, как среднее арифметическое, среднее геометрическое, среднее квадратическое, среднее гармоническое.
[0040] Разновидности среднего значения, применяемые при вычислении взвешенного среднего значения, аналогичны вышеупомянутым для вычисления простого усреднения, а взвешивание может осуществляться, например, таким образом, чтобы увеличивать вес показаний тех GNSS-сигналов, которые принимались и привязывались к соответствующему участку дороги - кандидату ближе во времени к аналогичному дню недели и аналогичному времени в прошлом. Другими словами, если раскрытый способ и в частности его подэтап S105.222 выполняется в понедельник в 18:00, то максимальный вес может быть присвоен показаниям тех GNSS-сигналов, которые принимались и привязывались к соответствующему участку дороги - кандидату в прошлый понедельник в 18:00 или в период с 18:00 до 18:10, или с 18:00 до 18:20, или с 18:00 до 18:30 и т.д., а уменьшение веса может применяться к показаниям любых GNSS-сигналов, которые принимались и привязывались к соответствующему участку дороги - кандидату по прошествии указанного момента или периода времени. Специалисты поймут, что приведенный выше пример взвешенного усреднения не следует интерпретировать в ограничивающем смысле, поскольку обычные специалисты оценят и другие варианты взвешенного усреднения, учитывающие, например, не только день недели и время, но и такие факторы как наличие/отсутствие осадков, наличие/отсутствие дорожно-транспортного происшествия или ремонтных работ на участке дороги - кандидате, поправку на время подъезда к интересующему участку дороги - кандидату и т.д., или любую их комбинацию.
[0041] Различные алгоритмы получения модели машинного обучения на основе случайного леса решающих деревьев или градиентного бустинга решающих деревьев, а также обучения нейросетевой модели известны и подробно описаны в уровне техники. В качестве обучающих данных для получения/обучения таких моделей может применяться любая содержащаяся в дорожном графе относящаяся к характеристике дороги статическая или динамическая информация. Статическая (или редко изменяемая) обучающая информация может включать в себя следующую привязанную к соответствующим ребрам или узлам дорожного графа информацию, но без ограничения упомянутым, информацию о протяженности дороги, информацию о масштабе, информацию о разрешенной скорости, информацию о количестве полос движения, информацию о направлении движения, информацию о разметке, информацию о знаках, информацию о светофорах, информацию о наличии трамвайных путей, информацию о наличии переездов железнодорожных путей и т.д., или любую их комбинацию. Динамическая (т.е. изменяемая с течением времени информация) обучающая информация может включать в себя следующую привязываемую к соответствующим ребрам или узлам дорожного графа информацию, а также к времени информацию, но без ограничения упомянутым, информацию о заторах, информацию о дорожных происшествиях, информацию о дорожных работах, информацию об осадках, информацию о температуре, информацию о дорожных перекрытиях, информацию о днях недели и т.д., или любую их комбинацию.
[0042] После выполнения подэтапа S105.222 переходят к выполнению подэтапов S105.333, S105.444, которые отличаются от соответствующих описанных выше подэтапов S105.3, S105.4, только тем, что зависящий от маневра участок дороги (или, в противном случае, не зависящий от маневра участок дороги) определяется по различию прогнозного времени проезда соответствующего участка дороги - кандидата с первым маневром и прогнозного времени проезда соответствующего участка дороги - кандидата со вторым маневром на предопределенную пороговую величину или более, а не по различию в среднем времени проезда участка дороги - кандидата с совершением того или иного маневра.
[0043] Четвертый вариант осуществления этапа S105 проиллюстрирован на фиг. 11. Чтобы избежать повторений далее будет описана только та часть четвертого варианта осуществления этапа S105 и соответствующие подробности, которые отличаются от третьего варианта осуществления этапа S105. Четвертый вариант осуществления этапа S105 начинают с выполнения подэтапа S105.1111, который соответствует описанному выше подэтапу S105.111. После выполнения подэтапа S105.1111 переходят к выполнению подэтапа S105.2222, который отличается от описанного выше подэтапа S105.222 тем, что для каждой пары маневров из по меньшей мере двух маневров, разрешенных на каждом из отобранных участков дороги - кандидатов, прогнозируют скорость объекта на соответствующем участке дороги - кандидате с совершением первого маневра из упомянутой пары маневров и скорость объекта на этом участке дороги - кандидате с совершением второго маневра из упомянутой пары маневров, а не время проезда соответствующего участка дороги - кандидата с совершением того или иного маневра.
[0044] В неограничивающем примере реализации подэтап S105.2222 может быть реализован следующей последовательностью операций: - постепенно расширяют (дальше по направлению в прошлое) наиболее актуальный предопределенный промежуток времени до тех пор, пока не будет получено множество GNSS-сигналов большее или равное по объему (т.е. общему количеству GNSS-сигналов) пороговому значению минимального объема данных или пока не будет получено множество GNSS-сигналов, указывающих проезд по участку дороги - кандидату объектов в количестве, которое больше или равно пороговому значению минимального количества объектов; для каждой пары маневров, разрешенных на данном участке дороги, выделяют из упомянутого множества GNSS-сигналов первое подмножество последовательностей распределенных во времени сигналов от объектов, совершивших на данном участке дороги первый разрешенный маневр, и второе подмножество последовательностей распределенных во времени сигналов от объектов, совершивших на данном участке дороги второй разрешенный маневр; и обращаясь к данным о протяженности дороги, соответствующей соответствующему участку дороги - кандидату, прогнозируют первую скорость объекта на соответствующем участке дороги - кандидате с совершением первого маневра на основании первого подмножества и прогнозируют вторую скорость объекта на соответствующем участке дороги - кандидате с совершением второго маневра на основании второго подмножества. Некоторые виды GNSS-сигналов могут непосредственно содержать данные о скорости объектов, в таком случае прогнозирование скорости объекта в приведенной выше последовательности операций может осуществляться без обращения к данным о протяженности дороги, соответствующей соответствующему участку дороги - кандидату, что может в некоторой степени дополнительно снизить вычислительную сложность раскрываемого здесь способа.
[0045] После выполнения подэтапа S105.2222 переходят к выполнению подэтапов S105.3333, S105.4444, которые отличаются от соответствующих описанных выше подэтапов S105.333, S105.444, только тем, что зависящий от маневра участок дороги (или, в противном случае, не зависящий от маневра участок дороги) определяется по различию прогнозной скорости объекта на участке дороги - кандидате с совершением первого маневра и прогнозной скорости объекта на участке дороги - кандидате с совершением второго маневра на предопределенную пороговую величину или более, а не по различию в прогнозном времени проезда соответствующего участка дороги - кандидата с совершением того или иного маневра.
[0046] Выше подробно описаны четыре варианта осуществления этапа S105, которые следует интерпретировать исключительно в качестве неограничивающих примеров. После ознакомления с приведенной выше информацией обычному специалисту станут понятны другие возможные варианты осуществления этапа S105 или его модификации. В качестве примера некоторые аспекты разных описанных выше вариантов осуществления этапа S105 могут быть объединены или изменены для создания нового варианта осуществления. Возвращаясь к описанию фиг. 1, после нахождения на этапе S105 для предопределенной территориальной области зависящих от маневров участков дороги (и не зависящих от маневров участков дороги) переходят к выполнению этапа S110, на котором принимают запрос на построение маршрута, проходящего через упомянутую предопределенную территориальную область. Запрос на построение маршрута может содержать по меньшей мере начальную точку маршрута и конечную точку маршрута. Запрос на построение маршрута может дополнительно/опционально содержать одну или несколько промежуточных точек маршрута. Прием запроса на построение маршрута может осуществляться в любой подходящей форме и с помощью беспроводной связи, основанной на любом стандарте беспроводной передачи данных (например, 3G, LTE, 5G, Wi-Fi, WiMax и т.д.).
[0047] После приема запроса на построение маршрута, проходящего через упомянутую предопределенную территориальную область, осуществляют на этапе S115 построение маршрута. Данный этап осуществляют на основе информации, содержащейся в запросе на построение маршрута, используя регулярно обновляемый дорожный граф, построенный для предопределенной территориальной области. Расчет маршрута может производиться любым известным алгоритмом (например, алгоритмом Дейкстры) с оптимизацией одного или более из времени до конца маршрута, расстояния до конца маршрута, количества маневров до конца маршрута, количества светофоров до конца маршрута и т.д.
[0048] При построении маршрута на этапе S115 оптимальный по времени маршрут из множества маршрутов - кандидатов может определяться корректнее за счет более точного учета среднего времени проезда / средней скорости объекта на зависящих от маневров участках дороги в составе того или иного маршрута - кандидата. Для этого может выполняться следующая последовательность операций, на которых: на основе запроса на построение маршрута определяют множество маршрутов - кандидатов, а затем для каждого маршрута - кандидата из упомянутого множества маршрутов - кандидатов: - обнаруживают все зависящие от маневров участки дороги, имеющиеся на маршруте - кандидате; - определяют среднее время проезда каждого из обнаруженных зависящих от маневров участков дороги, имеющихся на маршруте - кандидате, с учетом маневра, который должен быть совершен на этом участке дороги для следования по построенному маршруту - кандидату, при этом такое среднее время проезда определяется на основе наиболее актуальных данных о времени проезда за предопределенный промежуток времени, выводимых из обезличенных данных местоположений от множества объектов, которые ранее совершили аналогичный маневр на данном участке дороги; - определяют среднее время проезда всех остальных имеющихся на маршруте - кандидате участков дороги на основе наиболее актуальных данных о времени проезда за предопределенный промежуток времени, выводимых из обезличенных данных местоположений от множества объектов, которые ранее проехали данный участок дороги; и - агрегируют время проезда всех имеющихся на маршруте - кандидате участков дороги. В качестве построенного маршрута используют тот маршрут - кандидат из упомянутого множества маршрутов - кандидатов, который обладает минимальным агрегированным временем проезда всего маршрута. В альтернативной последовательности операций вместо среднего времени проезда определяют среднюю скорость объекта на участках дороги, получают усредненную скорость объекта по всем имеющимся на маршруте - кандидате участкам дороги и в качестве построенного маршрута используют тот маршрут - кандидат из упомянутого множества маршрутов - кандидатов, который обладает максимальной усредненной скоростью объекта.
[0049] После построения маршрута на этапе S120 обнаруживают все имеющиеся на маршруте, зависящие от маневров участки дороги. Данное обнаружение может выполняться на основе информации о ранее определенных зависящих от маневров участков дороги, содержащейся в регулярно обновляемом дорожном графе или таблице зависящих от маневров участков дороги. В неограничивающем примере реализации этап S120 может быть реализован следующей последовательностью операций: определяют по дорожному графу последовательность ребер и узлов, образующую соответствующий построенный маршрут, а также направление движения в каждом ребре и узле на маршруте; обнаруживают в качестве зависящих от маневров участков дороги те зависящие от маневров участки дороги участки, информацией о которых дополнены соответствующие ребра и узлы определенной последовательности. В другом неограничивающем примере реализации обнаруживают в качестве зависящих от маневров участков дороги те зависящие от маневров участки дороги, которые одновременно содержатся в построенном маршруте (как по меньшей мере его часть) и указываются в качестве таковых информацией, содержащейся в таблице зависящих от маневров участков дороги. В еще одном, другом неограничивающем примере реализации сначала обнаруживают все не зависящие от маневров участки дороги на построенном маршруте на основе информации, которой дополнены в дорожном графе соответствующие ребра и узлы определенной последовательности или которая содержится в таблице не зависящих от маневров участков дороги, а затем все оставшиеся на маршруте участки дороги (т.е. маршруты, не определенные ранее как не зависящие от маневров участки дороги) обнаруживаются в качестве зависящих от маневров участков дороги. Учитывая информацию, которая определяется и сохраняется в дорожный граф, таблицу зависящих от маневров участков дороги или таблицу не зависящих от маневров участков дороги согласно настоящему изобретению, специалисты поймут и другие возможные примеры реализации этапа S120.
[0050] Этап S120 обнаружения всех имеющихся на маршруте, зависящих от маневров участков дороги может дополнительно содержать подэтапы, на которых: определяют на маршруте цепочку из следующих непосредственно друг за другом двух или более зависящих от маневров участков дороги и обрабатывают определенную цепочку как один имеющийся на маршруте, зависящий от маневров участок дороги. Аналогичным образом могут объединяться в цепочки два или более не зависящих от маневров участков дороги в случае если они обнаруживаются на маршруте как непосредственно следующие друг за другом. Такое объединение снижает общее число последующих вычислительных операций, подлежащих выполнению при определении времени до конца маршрута, и, если мы говорим про объединение именно зависящих от маневров участков дороги, позволяет выявлять и учитывать неочевидное влияние цепочки маневров на итоговое время проезда или скорость объекта на таких участках дороги, поскольку время проезда или скорость объекта на такой цепочке зависящих от маневров участков дороги будет определяться на основе подмножества последовательностей распределенных во времени сигналов от объектов, совершивших на данном участке дороги именно такую цепочку маневров.
[0051] После обнаружения всех имеющихся на маршруте, зависящих от маневров участков дороги способ переходит к выполнению этапа S125, на котором определяют среднее время проезда каждого из обнаруженных имеющихся на маршруте, зависящих от маневров участков дороги с учетом маневра, который должен быть совершен на соответствующем участке дороги для следования по построенному маршруту. Такое среднее время проезда определяется на основе наиболее актуальных данных о времени проезда за предопределенный промежуток времени, выводимых из данных местоположений от множества объектов, которые ранее совершили аналогичный маневр на данном участке дороги. Следует понимать, что в некоторых вариантах осуществления раскрываемого способа такое “определение” на данном этапе S125 среднего времени может включать в себя простое (повторное) использование (т.е. без фактического вычисления) среднего времени проезда соответствующего зависящего от маневра участка дороги, которое было определено ранее при выполнении описанного выше подэтапа S105.2, чтобы избежать ненужных повторных вычислений ранее вычисленной, т.е. уже доступной, информации. Затем способ переходит к выполнению этапа S130, на котором определяют среднее время проезда всех остальных имеющихся на маршруте (не зависящих от маневров) участков дороги на основе наиболее актуальных данных о времени проезда за предопределенный промежуток времени, выводимых из данных местоположений от множества объектов, которые ранее проехали данный участок дороги.
[0052] Поскольку на этапе S130 среднее время проезда определяется для участков дороги, которые от каких-либо маневров не зависят, при его определении нет необходимости (как в описанной выше примерной последовательности операций реализации подэтапа S105.2) в каком-либо выделении из множества GNSS-сигналов различных подмножеств последовательностей распределенных во времени сигналов (для разных маневров), т.е. среднее время проезда на этапе S130 определяют на основании всего множества GNSS-сигналов, привязанных к соответствующему не зависящему от маневра участку дороги за наиболее актуальный предопределенный промежуток времени. Другим отличием этапов S125 и S130 от описанного выше подэтапа S105.2 является то, что среднее время проезда определяют не для реализации поиска (на предварительной стадии, которая может быть офлайн стадией) для предопределенной территориальной области зависящих от маневров участков дороги, а для фактической актуализации (на стадии использования) среднего времени проезда того или иного участка. В остальном подробности и примеры реализации этапов S125 и S130 аналогичны описанным выше подробностям и примерам реализации подэтапа S105.2, поэтому повторно они здесь не приводятся. Выполнение этапа S130 позволяет дополнительно повысить точность определения времени до конца маршрута, особенно в том случае, когда предварительная стадия и стадия использования раскрываемого способа разнесены во времени.
[0053] Способ, проиллюстрированный на фиг. 1, завершается передачей на этапе S135 построенного маршрута, в том числе среднего времени проезда каждого участка дороги на этом маршруте. Передача построенного маршрута, в том числе среднего времени проезда каждого участка дороги на маршруте, может осуществляться в любой подходящей форме и с помощью беспроводной связи, основанной на любом стандарте беспроводной передачи данных (например 3G, LTE, 5G, Wi-Fi, WiMax и т.д.).
[0054] Способ учета дорожного трафика и маневров движущегося объекта при определении времени до конца маршрута согласно первому аспекту настоящего изобретения, описанный выше со ссылкой на фиг. 1, может реализовываться компьютером 50 или совокупностью поддерживающих параллельные вычисления компьютеров (например, реализуемой компьютером навигационной системой 500). Компьютер 50 и реализуемая компьютером навигационная система 500 будут подробно описаны ниже со ссылкой на фиг. 5. Запрос на построение маршрута может быть принят на этапе S110 от электронного устройства пользователя 60, и построенный маршрут может быть передан на этапе S135 соответственно на электронное устройство пользователя 60. Электронное устройство пользователя 60 будет подробно описано ниже со ссылкой на фиг. 6. Способ учета дорожного трафика и маневров движущегося объекта при определении времени до конца маршрута согласно первому аспекту настоящего изобретения, описанный выше со ссылкой на фиг. 1, решает упомянутые выше технологические проблемы в уровне техники с достижением указанного технического результата.
[0055] Далее будут описаны некоторые дополнительные особенности и возможности раскрываемого здесь способа. Эти особенности и возможности применимы как к описанному выше со ссылкой на фиг. 1 способу учета дорожного трафика и маневров движущегося объекта при определении времени до конца маршрута согласно первому аспекту настоящего изобретения, так и к любому другому аспекту настоящего изобретения, которые будут подробно описаны ниже со ссылками на фиг. 2-7.
[0056] Согласно одной особенности настоящего изобретения, в случае приема от электронного устройства пользователя запроса на обновление данных о маршруте, содержащего данные текущего местоположения электронного устройства пользователя, или на регулярной основе до тех пор, пока электронное устройство пользователя не передаст данные текущего местоположения электронного устройства, указывающие конечную точку маршрута, способ может дополнительно содержать следующие этапы, на которых: обнаруживают все имеющиеся на оставшемся маршруте, зависящие от маневров участки дороги; определяют среднее время проезда каждого из обнаруженных оставшихся на маршруте, зависящих от маневров участков дороги с учетом маневра, который должен быть совершен на этом участке дороги для следования по оставшемуся маршруту, при этом такое среднее время проезда определяется на основе наиболее актуальных данных о времени проезда за предопределенный промежуток времени, выводимых из обезличенных данных местоположений от множества объектов, которые ранее совершили аналогичный маневр на данном участке дороги; определяют среднее время проезда всех остальных имеющихся на оставшемся маршруте участков дороги на основе наиболее актуальных данных о времени проезда за предопределенный промежуток времени, выводимых из обезличенных данных местоположений от множества объектов, которые ранее проехали данный участок дороги; и передают на электронное устройство пользователя обновленное среднее время проезда каждого участка дороги на оставшемся маршруте. В альтернативном варианте данной особенности настоящего изобретения вместо среднего времени проезда определяют среднюю скорость объекта на оставшихся участках дороги и на электронное устройство пользователя передают обновленную скорость объекта на каждом участке дороги оставшейся части маршрута. Такое обновление, совершаемое по запросу пользователя или на регулярной основе, позволяет актуализировать (т.е. повторно рассчитать по наиболее актуальным данным) данные оставшейся части маршрута, что может быть полезным для уточнения прогноза времени до конца маршрута, когда способ применяется при движении по густонаселенным районам/городам с быстроменяющимся транспортным трафиком.
[0057] В случае определения, например в ходе описанного выше обновления, среднего времени проезда предопределенного числа оставшихся на маршруте участков дороги, которое отличается от изначально определенного среднего времени проезда соответствующих участков дороги на предопределенную пороговую величину или более, маршрут строят повторно. Используемым здесь предопределенным числом здесь может быть 3 или более, а используемой здесь предопределенной пороговой величиной может быть 1/10, более предпочтительно 1/9, более предпочтительно 1/8, более предпочтительно 1/7, более предпочтительно 1/6, более предпочтительно 1/5, более предпочтительно 1/4, еще более предпочтительно 1/3, наиболее предпочтительно 1/2 или более в относительном или абсолютном выражении. В альтернативном варианте данной особенности настоящего изобретения вместо среднего времени проезда может использоваться средняя скорость объекта.
[0058] Перестроенный маршрут, в том числе среднее время проезда каждого участка дороги на этом перестроенном маршруте, можно сравнивать с оставшейся частью изначально построенного и переданного маршрута и передавать на электронное устройство пользователя только в случае, когда перестроенный маршрут отличается от оставшейся части изначально построенного маршрута. Данная особенность позволяет избежать ненужную обработку, связанную с повторным представлением того же самого маршрута на электронном устройстве пользователя, а также не расходовать впустую полосу пропускания используемой системы связи.
[0059] Далее со ссылкой на фиг. 2 подробно описан реализуемый компьютером способ учета дорожного трафика и маневров движущегося объекта при определении времени до конца маршрута согласно второму аспекту настоящего изобретения. Способ согласно второму аспекту настоящего изобретения является наиболее предпочтительным. Чтобы избежать повторений далее будет описана только та часть способа согласно второму аспекту, которая отличается способа согласно первому аспекту. Основным отличием способа согласно второму аспекту от способа согласно первому аспекту настоящего изобретения является объединение описанных выше этапов S105 и S120 в один объединенный этап S215, который выгоден с позиции еще большей минимизации объема вычислений, поскольку зависящие от маневров участки дороги ищут в способе согласно второму аспекту только для конкретного маршрута, а не для всей предопределенной территориальной области.
[0060] Реализуемый компьютером способ учета дорожного трафика и маневров движущегося объекта при определении времени до конца маршрута согласно второму аспекту начинается с выполнения этапа S205, на котором принимают запрос на построение маршрута, проходящего через предопределенную территориальную область. Подробности и примеры реализации этапа S205 аналогичны описанным выше подробностям и примерам реализации этапа S110, поэтому повторно они здесь не приводятся. Затем переходят к выполнению этапа S210, на котором строят маршрут. Подробности и примеры реализации этапа S210 аналогичны описанным выше подробностям и примерам реализации этапа S115, поэтому повторно они здесь не приводятся. Основное отличие заключается тут лишь в том, что этапы S205, S210 выполняются до этапа поиска зависящих от маневров участков дороги.
[0061] После построения маршрута переходят к выполнению (объединенного) этапа S215, на котором зависящие от маневров участки дороги, на которых разрешены по меньшей мере два маневра и время проезда которых отличается в зависимости от того, какой из упомянутых по меньшей мере двух маневров на каждом из них совершается, ищут именно на построенном маршруте. Таким образом в отличие от этапа S105 этап S215 применяется ограниченно для поиска зависящих от маневров участков дороги только на построенном маршруте, а не на всей предопределенной территориальной области. В остальном, другие подробности, принципы работы и примеры реализации этапа S215 аналогичны описанным выше подробностям, принципам работы и вариантам осуществления этапа S105, поэтому повторно они здесь не приводятся.
[0062] После нахождения для построенного маршрута всех зависящих от маневров участков дороги переходят к выполнению этапа S220, на котором определяют среднее время проезда каждого найденного зависящего от маневра участка дороги, учитывая маневр, который должен быть совершен на этом участке дороги для следования по построенному маршруту. Такое среднее время проезда определяется на основе наиболее актуальных данных о времени проезда за предопределенный промежуток времени, выводимых из данных местоположений от множества объектов, которые ранее совершили аналогичный маневр на данном участке дороги. Следует понимать, что в некоторых вариантах осуществления раскрываемого способа такое “определение” на данном этапе S220 среднего времени может включать в себя простое (повторное) использование (т.е. без фактического вычисления) среднего времени проезда соответствующего зависящего от маневра участка дороги, которое было определено ранее при выполнении описанного выше подэтапа S215, чтобы избежать ненужных повторных вычислений ранее вычисленной, т.е. уже доступной, информации. Другие подробности, принципы работы и примеры реализации этапа S220 аналогичны описанным выше подробностям, принципам работы и примерам реализации этапа S125, поэтому повторно они здесь не приводятся.
[0063] Затем переходят к выполнению этапа S225, на котором определяют среднее время проезда всех остальных имеющихся на маршруте участков дороги на основе наиболее актуальных данных о времени проезда за предопределенный промежуток времени, выводимых из данных местоположений от множества объектов, которые ранее проехали данный участок дороги. Подробности, принципы работы и примеры реализации этапа S225 аналогичны описанным выше подробностям, принципам работы и примерам реализации этапа S130, поэтому повторно они здесь не приводятся. Наконец, построенный маршрут, в том числе среднее время проезда каждого участка дороги на этом маршруте, передают на этапе S230. Подробности, принципы работы и примеры реализации этапа S230 аналогичны описанным выше подробностям, принципам работы и примерам реализации этапа S135, поэтому повторно они здесь не приводятся.
[0064] Далее со ссылкой на фиг. 3 подробно описан реализуемый компьютером способ построения маршрута с учетом дорожного трафика и маневров движущегося объекта согласно третьему аспекту настоящего изобретения. Подробности, принципы работы и примеры реализации этапов и операций в способе согласно третьему аспекту настоящего изобретения, которые аналогичны этапам и операциям в способах согласно первому и второму аспектам настоящего изобретения, повторно описываться далее не будут. Способ согласно третьему аспекту настоящего изобретения относится к построению маршрута.
[0065] Способ начинается с выполнения этапа S305, на котором осуществляют поиск, для предопределенной территориальной области, зависящих от маневров участков дороги, на которых разрешены по меньшей мере два маневра и время проезда которых отличается в зависимости от того, какой из упомянутых по меньшей мере двух маневров совершается. Подробности, принципы работы и примеры реализации этапа S305 аналогичны описанным выше подробностям, принципам работы и вариантам осуществления этапа S105, поэтому повторно они здесь не приводятся. Затем на этапе S310 принимают запрос на построение маршрута. Подробности, принципы работы и примеры реализации этапа S310 аналогичны описанным выше подробностям, принципам работы и примерам реализации этапа S110, поэтому повторно они здесь не приводятся.
[0066] После нахождения всех зависящих от маневров участков дороги для предопределенной территориальной области и приема запроса на построение маршрута через упомянутую предопределенную территориальную область переходят к выполнению этапа S315, на котором строят множество маршрутов - кандидатов через упомянутую предопределенную территориальную область. Подробности, принципы работы и примеры реализации этапа S315 аналогичны описанным выше подробностям, принципам работы и примерам реализации этапа S115, поэтому повторно они здесь не приводятся.
[0067] Затем для каждого маршрута - кандидата из упомянутого множества маршрутов - кандидатов выполняют этап S320, на котором обнаруживают все зависящие от маневров участки дороги, имеющиеся на маршруте - кандидате, этап S325, на котором выводят среднее время проезда каждого из обнаруженных зависящих от маневров участков дороги с учетом маневра, который должен быть совершен на этом участке дороги для следования по построенному маршруту - кандидату, из данных местоположений от объектов, ранее совершивших за предопределенный промежуток времени аналогичный маневр на данном участке дороги, этап S330, на котором выводят среднее время проезда всех остальных имеющихся на маршруте - кандидате участков дороги из данных местоположений от объектов, ранее проехавших данный участок дороги, и агрегируют на этапе S335 время проезда всех имеющихся на маршруте - кандидате участков дороги. Подробности, принципы работы и примеры реализации этапов S320, S325, S330 аналогичны описанным выше подробностям, принципам работы и примерам реализации этапа S120, S125, S130, поэтому повторно они здесь не приводятся. Агрегирование на этапе S335 времени проезда всех имеющихся на маршруте - кандидате участков дороги может быть выполнено любым известным способом, например, но без ограничения упомянутым, усреднением, взвешенным усреднением и т.д.
[0068] Наконец, на этапе S340 определяют, в качестве построенного маршрута, и передают тот маршрут - кандидат, который обладает минимальным агрегированным временем проезда всех имеющихся на маршруте - кандидате участков дороги, а также среднее время проезда каждого участка дороги на этом маршруте. Подробности, принципы работы и примеры реализации этапа S340 аналогичны описанным выше подробностям, принципам работы и примерам реализации этапа S135, поэтому повторно они здесь не приводятся.
[0069] Далее со ссылкой на фиг. 4 подробно описан реализуемый компьютером способ построения маршрута с учетом дорожного трафика и маневров движущегося объекта согласно четвертому аспекту настоящего изобретения. Чтобы избежать повторений далее будет описана только та часть способа согласно четвертому аспекту, которая отличается способа согласно третьему аспекту. Главным отличием способа согласно четвертому аспекту от способа согласно третьему аспекту настоящего изобретения является то, что на этапах S425, S430, S435 работают со средней скоростью движения объекта на участке дороги, а не со средним временем проезда участка дороги. Поскольку критерием является скорость объекта на последнем этапе S440 способа согласно четвертому аспекту настоящего изобретения, определяют, в качестве построенного маршрута, и передают тот маршрут - кандидат, который обладает максимальной усредненной скоростью объекта, а также среднюю скорость объекта на каждом участке дороги на этом маршруте. В остальном подробности, принципы работы и примеры реализации этапов S305 - S340 аналогичны описанным выше подробностям, принципам работы и примерам реализации этапов S405 - S440, поэтому повторно они здесь не приводятся.
[0070] На фиг. 5 схематично показана примерная реализуемая компьютером навигационная система 500 (далее для краткости упоминаемая как компьютерная система 500 или просто система 500), учитывающая дорожный трафик и маневры движущихся объектов при построении маршрутов или определении времени до конца маршрутов. Данная система может использоваться для выполнения любых описанных выше способов согласно настоящему изобретению. Система 500 может содержать множество компьютеров 50, каждый из которых содержит память 50.1, хранящую исполняемые процессором инструкции, блок связи 50.2, выполненный с возможностью осуществления связи с электронными устройствами 60 пользователей, и процессор 50.3, выполненный с возможностью исполнения упомянутых исполняемых процессором инструкций для выполнения любого из описанных выше способов согласно настоящему изобретению.
[0071] В некоторых вариантах осуществления настоящей технологии каждый компьютер 50 может быть реализован как обычный компьютерный сервер. В одном неограничивающем примере компьютер 50 реализуется как сервер Dell™ PowerEdge™, работающий под управлением операционной системы Microsoft™ Windows Server™ или Linux, но также может быть реализован в любом другом подходящем аппаратном обеспечении, программном обеспечении и/или микропрограммном обеспечении или их комбинации. Как показано на фиг. 5 система содержит три компьютера, но должно быть понятно, что число компьютеров может быть другим (например, вся система 500 может быть реализована одним компьютером 50, или содержать любое число компьютеров 50 больше одного).
[0072] В показанном на фиг. 5 неограничивающем варианте осуществления настоящей технологии, в котором система 500 содержит три компьютера 50, функциональные возможности системы 500 и вычислительная и иная нагрузка распределяются по этим компьютерам 50. Система 500 и компьютеры 50 опционально могут быть выполнены с поддержкой параллельных вычислений. Двунаправленная связь между компьютерами может обеспечиваться с помощью шины высокоскоростной передачи данных (например, шины PCI/PCI Express, универсальной последовательной шины, шины IEEE 1394 «Firewire», шины SCSI, шины Serial-ATA и т.д.) или с помощью высокоскоростного интерфейса беспроводной связи, реализуемого, например, антенной миллиметрового диапазона. В альтернативном варианте осуществления компьютеры 50 могут действовать обособленно, а распределение заданий (например, запросов на построение / обновление маршрута) может выполняться одним из компьютеров, который назначен в качестве главного компьютера, или выполняться таким образом, чтобы распределять нагрузку на компьютеры 50 равномерно.
[0073] Память 50.1 может включать в себя постоянную память и/или оперативную память. Память 50.1 может быть дополнительно выполнена с возможностью хранения регулярно обновляемого дорожного графа, регулярно обновляемых зависящих/не зависящих от маневров участков дороги, исторических данных местоположений электронных устройств всех пользователей, а также любых других необходимых для работы данных. Память 50.1 может хранить операционную систему и одну или более программ/приложений. Операционной системой может быть, например, Microsoft™ Windows™ или Linux. Одна или более программ/приложений может быть любой программой или набором программ, которые включают в себя запрограммированные инструкции, которые могут исполняться процессором 50.3 для управления действиями, предпринимаемыми компьютерной системой 500 или ее отдельными компонентами.
[0074] Неограничивающими примерами постоянной памяти 50.1 могут быть твердотельный накопитель (SSD), который может использовать сборку интегральной схемы для постоянного хранения данных, жесткий диск (HDD), такой как электромеханическое устройство, которое использует магнитное хранилище для хранения и извлечения цифровых данных, оптический диск, съемная карта памяти (например SD-карта), устройство флэш-памяти, которое может быть подключено к компьютерной системе 500, например, через универсальную последовательную шину (USB). Другими неограничивающими примерами постоянной памяти 50.1 могут быть ROM, PROM, EPROM, EEPROM или любые модификации/комбинации вышеперечисленных типов постоянной памяти. Неограничивающими примерами оперативной памяти 50.1 могут быть RAM, DDR, LPDDR, DRAM, SRAM, SDRAM, SDR SDRAM, DDR SDRAM или их любые модификации/комбинации.
[0075] В некоторых реализациях компьютерная система 500 может использовать хорошо известные методы виртуальной памяти, которые позволяют программам/приложениям компьютерной системы 500 вести себя так, как если бы они имели доступ к большому, непрерывному адресному пространству вместо доступа к многочисленным, меньшим пространствам хранения, таким как блоки памяти 50.1. Следовательно, специалисты в данной области техники поймут, что хотя обычно любые данные, операционная система и любые программы размещаются в памяти 50.1 постоянно и полностью, в альтернативном варианте эти данные, операционная система и программы могут размещаться в конкретном блоке постоянной или оперативной памяти 50.1 в определенный момент времени не постоянно и/или не полностью, а могут быть распределены по многим блокам памяти посредством виртуализации.
[0076] Процессоры 50.3 могут включать в себя один или более микропроцессоров и/или других интегральных схем. Процессоры 50.3 исполняют программные инструкции, хранящиеся в памяти 50.1. Когда компьютерная система 500 запускается, процессоры 50.3 могут изначально выполнять процедуру загрузки и/или программные инструкции, составляющие операционную систему, микропрограммное обеспечение или другие программы/приложения.
[0077] В некоторых реализациях настоящей технологии процессор 50.3 может быть процессором общего назначения, например центральным процессором (CPU), или процессором, предназначенным для конкретной цели, например цифровым сигнальным процессором (DSP). Кроме того, использование термина «процессор» не должно толковаться как относящееся исключительно к аппаратному обеспечению, способному выполнять программное обеспечение, и может неявно включать в себя, не ограничиваясь, специализированную интегральную схему (ASIC), программируемую пользователем вентильную матрицу (FPGA), систему на кристалле (SoC), встроенную постоянную память, встроенную оперативную память. Другое аппаратное обеспечение, традиционное и/или специализированное, также может быть включено в состав процессора 50.3.
[0078] Любые этапы описанных выше способов могут исполняться или контролироваться процессором 50.3 за счет исполнения соответствующих хранящихся в памяти 50.1 исполняемых компьютером инструкций. Неограничивающие примеры возможных форм таких инструкций включают в себя инструкции ассемблера, машинные инструкции, инструкции микропрограммного обеспечения, конфигурационные данные для интегральной схемы, либо исходный / объектный код, написанный на любой комбинации из одного или более языков программирования (например Java, C, C++, C#, Python и т.д.). Кроме того, процессор 50.3 может побуждать любой аппаратный/программный блок компьютера 50 к выполнению в определенный момент времени требуемой функции, реализуемой этим аппаратным/программным блоком.
[0079] Блок 50.2 связи может использоваться для связи компьютера 50 системы 500 с электронным устройством 60 пользователя. Более конкретно, блок 50.2 связи выполнен с возможностью приема от электронных устройств 60 пользователей запросов на построение/обновление маршрутов и данных местоположений электронных устройств, и передачи на соответствующие электронные устройства 60 пользователей, в ответ на соответствующие запросы на построение/обновление маршрутов, построенные/обновленные маршруты, в том числе среднее время проезда или среднюю скорость объекта на каждом участке дороги для каждого маршрута. Любые другие данные могут передаваться на / приниматься от электронных устройств 60 пользователей через блок 50.2 связи.
[0080] Связь между компьютером 50 системы 500 и одним или более электронными устройствами 60 пользователей может осуществляться через сеть связи любого типа. Блок 50.2 связи может включать в себя сетевой интерфейс, реализуемый через комбинацию аппаратного и программного обеспечения и позволяющий осуществлять связь по сети. В некоторых реализациях сетевой интерфейс может быть беспроводным сетевым интерфейсом. Программное обеспечение в сетевом интерфейсе может включать в себя программное обеспечение, которое использует один или более сетевых протоколов для связи по сети. Например, сетевые протоколы могут включать в себя TCP/IP (протокол управления передачей / Интернет-протокол). Кроме того, блок 50.2 связи может содержать или взаимодействовать с приемопередатчиком (не показан), обеспечивающим беспроводную связь с электронными устройствами 60 пользователей, основанную на любом стандарте беспроводной передачи данных (например 3G, LTE, 5G, Wi-Fi, WiMax и т.д.).
[0081] Следует понимать, что компьютерная система 500 является лишь примером, и что раскрытая технология может использоваться с компьютерными системами или другими вычислительными устройствами, имеющими другие конфигурации. Например, для реализации функций, связанных с машинным обучением и нейронными сетями (например в некоторых вариантах реализации подэтапа S105.222) компьютерная система может быть оснащена или ей могут быть доступны специализированные (т.е. выделенные специально для этой цели) блоки CPU, GPU, и/или нейронные процессоры. Кроме того, компьютер 50 может быть оснащен другими стандартными для вычислительной машины компонентами, которые явно выше не указаны, например, средствами ввода/вывода, сетевой картой, материнской платой, блоком питания, необходимыми соединениями / шинами и т.д.
[0082] На фиг. 6 схематично показана примерная конфигурация электронного устройства 60 пользователя для осуществления навигации по маршруту согласно шестому аспекту настоящего изобретения. Электронное устройство пользователя 60 содержит процессор 60.1, память 60.2, экран 60.3 и блок 60.4 связи. Электронным устройством 60 пользователя может быть электронное устройство, находящееся в объекте пользователя, или электронное устройство, являющееся компонентом объекта, принадлежащего пользователю. Под “объектом” в данном раскрытии понимается любой движущийся или следующий по маршруту объект, например, транспортное средство. Таким образом, в первом случае электронным устройством 60 может быть персональное электронное (вычислительное) устройство пользователя, обеспечивающее для пользователя навигационную функцию, например смартфон, планшет, ноутбук и т.д., а во втором случае электронным устройством 60 может быть встроенный в транспортное средство электронный компонент (например вычислительный блок встроенной навигационной системы), выполненный с возможностью предоставления пользователю транспортного средства навигационной функции. Навигационная функция может обеспечиваться через устанавливаемое или встраиваемое навигационное приложение (например приложение Яндекс Навигатор).
[0083] При обеспечении навигационной функции процессор 60.1 может быть выполнен с возможностью обработки (например через установленное навигационное приложение) построенного/обновленного маршрута и дорожной карты для представления на экране построенного/обновленного маршрута на карте. Каждый не зависящий от маневра участок дороги построенного/обновленного маршрута представляется на карте на основе соответствующего среднего времени проезда или средней скорости объекта на этом участке дороги. Каждый зависящий от маневра участок дороги построенного/обновленного маршрута представляется на карте на основе соответствующего среднего времени проезда или средней скорости объекта, определенного/определенной с учетом маневра, подлежащего совершению на этом участке дороги для следования по маршруту.
[0084] Процессор 60.1 может включать в себя один или более микропроцессоров и/или других интегральных схем. Процессор 60.1 исполняет программные инструкции, хранящихся в памяти 60.2. Когда электронное устройство 60 пользователя запускается, процессор 60.1 может изначально выполнять процедуру загрузки и/или программные инструкции, составляющие операционную систему, микропрограммное обеспечение или другие программы/приложения.
[0085] В некоторых реализациях настоящей технологии процессор 60.1 может быть процессором общего назначения, например центральным процессором (CPU), или процессором, предназначенным для конкретной цели, например цифровым сигнальным процессором (DSP). Кроме того, использование термина «процессор» не должно толковаться как относящееся исключительно к аппаратному обеспечению, способному выполнять программное обеспечение, и может неявно включать в себя, не ограничиваясь, специализированную интегральную схему (ASIC), программируемую пользователем вентильную матрицу (FPGA), систему на кристалле (SoC), встроенную постоянную память, встроенную оперативную память. Другое аппаратное обеспечение, традиционное и/или специализированное, также может быть включено в состав процессора 60.1.
[0086] Процессор 60.1 электронного устройства 60 пользователя может исполнять или по меньшей мере контролировать выполнение любого этапа, связанного с обеспечением навигационной функции, за счет исполнения соответствующих хранящихся в памяти 60.2 исполняемых компьютером инструкций. Неограничивающие примеры возможных форм таких инструкций включают в себя инструкции ассемблера, машинные инструкции, инструкции микропрограммного обеспечения, конфигурационные данные для интегральной схемы, либо исходный / объектный код, написанный на любой комбинации из одного или более языков программирования (например Java, C, C++, C#, Python и т.д.). Кроме того, процессор 60.1 может побуждать любой аппаратный/программный блок электронного устройства 60 пользователя к выполнению в определенный момент времени требуемой функции, реализуемой этим аппаратным/программным блоком.
[0087] В некоторых аспектах настоящего изобретения некоторые или все операции раскрытых выше способов, обычно исполняемые реализуемой компьютером навигационной системой 500, могут исполняться на самом электронном устройстве 60 пользователя в процессоре 60.1 на основе информации, которая может быть доступна на электронном устройстве 60 пользователя (например в памяти 60.2) или которая может быть запрошена/принята от реализуемой компьютером навигационной системы 500 (посредством блоков 50.2, 60.4 связи). В качестве примера реализуемая компьютером навигационная система 500 может быть ответственна за построение и регулярное обновление дорожного графа и/или таблиц зависящих/не зависящих от маневров участков дороги, которые могут передаваться (посредством блоков 50.2, 60.4 связи) на электронное устройство 60 пользователя для определения времени до конца конкретного указываемого пользователем маршрута на самом устройстве 60.
[0088] Память 60.2 может включать в себя постоянную память и/или оперативную память. Память 60.2 может быть выполнена с возможность хранения построенного/обновленного маршрута и дорожной карты для упомянутой предопределенной карты территориальной области. Память 60.2 может быть дополнительно выполнена с возможностью хранения регулярно обновляемого дорожного графа, регулярно обновляемых зависящих/не зависящих от маневров участков дороги (например в форме соответствующих таблиц) и исторических данных местоположений электронного устройства пользователя, а также любых других необходимых для работы данных. Память 60.2 может хранить операционную систему и одну или более программ/приложений (например приложение Яндекс Навигатор). Операционной системой может быть, например, Android, iOS, HarmonyOS, Microsoft Windows или Linux. Одна или более программ/приложений может быть любой программой или набором программ, которые включают в себя запрограммированные инструкции, которые могут исполняться процессором 60.2 для управления действиями, предпринимаемыми электронным устройством 60 пользователя или его компонентами. Неограничивающими примерами постоянной памяти 60.2 могут быть SSD, ROM, PROM, EPROM, EEPROM, съемная карта памяти или их любые модификации/комбинации. Неограничивающими примерами оперативной памяти 60.2 могут быть RAM, DDR, LPDDR, DRAM, SRAM, SDRAM, SDR SDRAM, DDR SDRAM или их любые модификации/комбинации.
[0089] Блок 60.4 связи осуществляет связь с блоком 50.2 связи в системе 500. В частности, блок 60.4 связи выполнен с возможностью передачи в реализуемую компьютером навигационную систему 500 вводимого пользователем запроса на построение/обновление маршрута, проходящего через предопределенную территориальную область и содержащего по меньшей мере начальную точку маршрута и конечную точку маршрута, и приема от упомянутой системы 500 построенного/обновленного маршрута, включающего в себя среднее время проезда или среднюю скорость объекта на каждом зависящем/не зависящем от маневра участке дороги. Любые другие данные могут передаваться на / приниматься от компьютерной системы 500 через блок 60.4 связи.
[0090] Связь между блоком 60.4 связи и системой 500 может осуществляться через сеть связи любого типа. Блок 60.4 связи может включать в себя сетевой интерфейс, реализуемый через комбинацию аппаратного и программного обеспечения и позволяющий осуществлять связь по сети. Блок 60.4 связи может содержать или взаимодействовать с приемопередатчиком, обеспечивающим беспроводную связь с системой 500, основанную на любом стандарте беспроводной передачи данных (например 3G, LTE, 5G, Wi-Fi, WiMax и т.д.).
[0091] Экран 60.3 может быть любым экраном, выполненным с возможностью отображения пользователю информации, например навигационной информации (карты, маршрута, пробок, дорожно-транспортных происшествий и т.д.) из навигационного приложения, установленного на электронном устройстве 60 пользователя. Кроме того, экран 60.3 может быть сенсорным экраном любого типа, выполненным с возможностью приема пользовательского ввода (например начальной и конечной точки маршрута, а также, опционально, одной или нескольких промежуточных точек маршрута) для формирования через навигационное приложение запроса на построение / обновление маршрута и его передачи в систему 500.
[0092] Электронное устройство 60 пользователя может дополнительно содержать блок 60.5 обнаружения местоположения (например GNSS-блок), выполненный с возможностью определять местоположение, принимая сигналы от одного или более спутников. Процессор 60.1 в этом случае может быть дополнительно выполнен с возможностью, при обнаружении блоком 60.5 обнаружения местоположения изменения местоположения, побуждать блок 60.4 связи передавать в упомянутую систему 500 обезличенные данные местоположений на регулярной основе до тех пор, пока блоком 60.5 обнаружения местоположения не будет обнаружено местоположение, по существу соответствующее конечной точке маршрута. Такие обезличенные данные местоположений могут быть использованы системой 500, например, для просчета оставшейся части маршрута для текущего пользователя, а также для определения зависящих/не зависящих от маневров участков дороги, регулярного обновления дорожного графа и/или таблиц зависящих/не зависящих от маневров участков дороги для использовании при обработке запросов на построение / обновление маршрутов от других пользователей системы 500.
[0093] Следует понимать, что электронное устройство 60 пользователя является лишь примером, и что раскрытая технология может использоваться с электронными устройствами пользователей или другими вычислительными устройствами, имеющими другие конфигурации. Например, для реализации функций, связанных с машинным обучением и нейронными сетями электронное устройство 60 пользователя может быть оснащено или ему могут быть доступны специализированные (т.е. выделенные специально для этой цели) блоки CPU, GPU, и/или нейронные процессоры. Кроме того, электронное устройство 60 пользователя может быть оснащено другими стандартными для вычислительного устройства компонентами, которые явно выше не указаны, например, средствами ввода/вывода, антенной, WiFi-модулем, ИК-модулем, Bluetooth-модулем, блоком питания, необходимыми соединениями / шинами и т.д.
[0094] Пример отображения навигационной информации на электронных устройствах 60 пользователей показан на фиг. 7. На экранах электронных устройств 60 пользователей, показаны снимки экрана с примерным интерфейсом навигационного приложения. Важно отметить, что движение пользователя, обладателя левого устройства 60, и движение пользователя, обладателя правого устройства 60, происходят в одно и то же время. Показанные устройства 60 могут находится в соответствующих транспортных средствах пользователей (вместе с соответствующими пользователями) при следовании транспортных средств по маршруту. Позициями 700 и 800 показано то, как на разных электронных устройствах пользователей один и тот же зависящий от маневра участок дороги, имеющийся на ул. Новый Арбат, может отображаться по-разному в зависимости от маршрута следования и текущей учитывающей маневры дорожной обстановки.
[0095] На левом устройстве область 700 зависящего от маневра участка дороги в основном указывается зеленым (что схематично указано буквой 'з' на экране левого устройства 60), поскольку те транспортные средства, которые следовали прямо (т.е. не сворачивали на Новинский бульвар) обычно проезжали данный участок дороги быстрее или с более высокой скоростью. На правом устройстве область 800 того же самого зависящего от маневра участка дороги в основном указывается красным (что схематично указано буквой 'к' на экране правого устройства 60), поскольку те транспортные средства, которые сворачивали на Новинский бульвар, а не следовали прямо, обычно проезжали данный участок дороги медленнее или с менее высокой скоростью. И в том, и в другом случае время до конца маршрута определялось точнее, поскольку в расчете времени проезда или скорости на данном участке дороги в каждом случае учитывались только те транспортные потоки, которые соответствовали маршруту текущего пользователя, а не усредненные по всем возможным маневрам транспортные потоки.
[0096] Различные репрезентативные реализации раскрытой технологии подробно описаны выше со ссылкой на прилагаемые чертежи. Однако настоящая технология может быть реализована во многих различных формах, и ее не следует рассматривать как ограниченную примерными реализациями, раскрытыми в данном документе. Приведенные в данном документе примеры и условные формулировки призваны главным образом помочь читателю понять принципы настоящей технологии, а не ограничить ее объем такими конкретно приведенными примерами и условиями. Должно быть понятно, что специалисты в данной области смогут разработать различные механизмы, которые, хоть и не описаны в данном документе явным образом, тем не менее воплощают принципы настоящей технологии и включаются в ее суть и объем. В качестве примера настоящее изобретение может использоваться как часть навигационной системы транспортного средства, обладающего функцией автономного вождения, такая часть навигационной системы может отвечать за построение маршрута или определение времени до конца маршрута при автономном движении/управлении такого транспортного средства.
[0097] Кроме того, данное подробное описание может описывать реализации настоящей технологии в относительно упрощенном виде для целей упрощения понимания. Специалисты в данной области поймут, что различные реализации настоящей технологии могут иметь большую сложность. В некоторых случаях также могут быть изложены примеры модификаций настоящей технологии, которые считаются полезными. Это делается лишь для содействия пониманию и опять же не для строгого определения объема или очерчивания границ настоящей технологии. Эти модификации не являются исчерпывающим списком, и специалист в данной области сможет осуществить другие модификации, все еще оставаясь при этом в рамках объема настоящей технологии. Кроме того, случаи, когда примеры модификаций не приводятся, не следует толковать так, что никакие модификации не могут быть осуществлены и/или что описанное является единственным способом реализации такого элемента настоящей технологии.
[0098] Следует понимать, что, хотя термины первый, второй, третий и т.д. могут использоваться в данном документе для описания различных элементов, эти элементы не должны ограничиваться этими терминами. Эти термины используются для отличия одного элемента от другого. Таким образом, первый элемент, обсуждаемый выше, можно было бы назвать вторым элементом без отступления от идей настоящего раскрытия. Используемый здесь термин «и/или» включает в себя любые и все комбинации из одного или более связанных перечисленных элементов. Кроме того, понятно, что номера этапов не ограничивают очередность их выполнения.
[0099] Используемая здесь терминология предназначена только для описания конкретных репрезентативных реализаций и не предназначена для ограничения настоящей технологии. Предполагается, что используемые здесь формы единственного числа включают в себя формы множественного числа, если контекст явно не указывает иное. Кроме того, будет понятно, что термины «содержит», «включает в себя» и/или «содержащий», «включающий в себя», когда они используются в этом описании, определяют наличие заявленных функций, единых целых, этапов, операций, элементов и/или компонентов, но не исключают наличие или добавление одной или более других функций, единых целых, этапов, операций, элементов, компонентов и/или их групп.
[0100] Настоящая технология может быть реализована как система, способ и/или компьютерный программный продукт. Компьютерный программный продукт может включать в себя считываемый компьютером носитель данных (или носители), хранящий считываемые компьютером программные инструкции, которые при исполнении процессором побуждают процессор осуществлять аспекты раскрытой технологии. Считываемый компьютером носитель данных может быть, например, электронным запоминающим устройством, магнитным запоминающим устройством, оптическим запоминающим устройством, электромагнитным запоминающим устройством, полупроводниковым запоминающим устройством или любой их подходящей комбинацией. Неисчерпывающий список более конкретных примеров считываемого компьютером носителя данных включает в себя: портативный компьютерный диск, жесткий диск, оперативную память (RAM), постоянную память (ROM), флэш-память, оптический диск, карту памяти, дискету, носитель с механическим или визуальным кодированием (например, перфокарту или штрихкод) и/или их любую комбинацию. Считываемый компьютером носитель данных, используемый в данном документе, следует рассматривать как долговременный считываемый компьютером носитель. Его не следует рассматривать как переходной сигнал, такой как радиоволны или другие свободно распространяющиеся электромагнитные волны, электромагнитные волны, распространяющиеся по волноводу или другим средам передачи (например, световые импульсы, проходящие по оптоволоконному кабелю), или электрические сигналы, передаваемые по проводу.
[0101] Будет понятно, что считываемые компьютером программные инструкции могут быть загружены в соответствующие вычислительные или обрабатывающие устройства со считываемого компьютером носителя данных или во внешний компьютер или внешнее запоминающее устройство через сеть, такую как Интернет, локальная сеть, глобальная сеть и/или беспроводная сеть. Сетевой интерфейс в вычислительном/обрабатывающем устройстве может принимать считываемые компьютером программные инструкции через сеть и пересылать считываемые компьютером программные инструкции для сохранения на считываемом компьютером носителе данных в соответствующем вычислительном или обрабатывающем устройстве.
[0102] Модификации и улучшения вышеописанных реализаций настоящей технологии могут стать очевидными для специалистов в данной области техники после ознакомления с настоящим раскрытием. Предшествующее описание предназначено для того, чтобы быть примерным, а не ограничивающим. Поэтому предполагается, что объем настоящей технологии ограничен лишь объемом прилагаемой формулы изобретения.
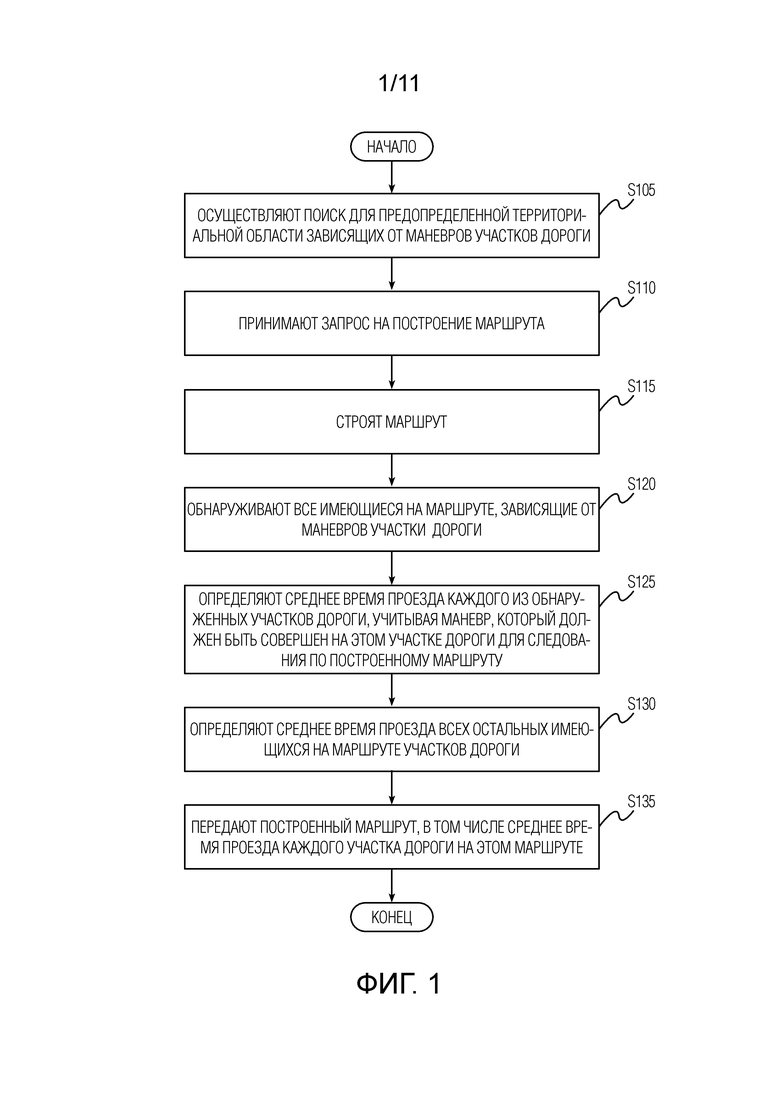
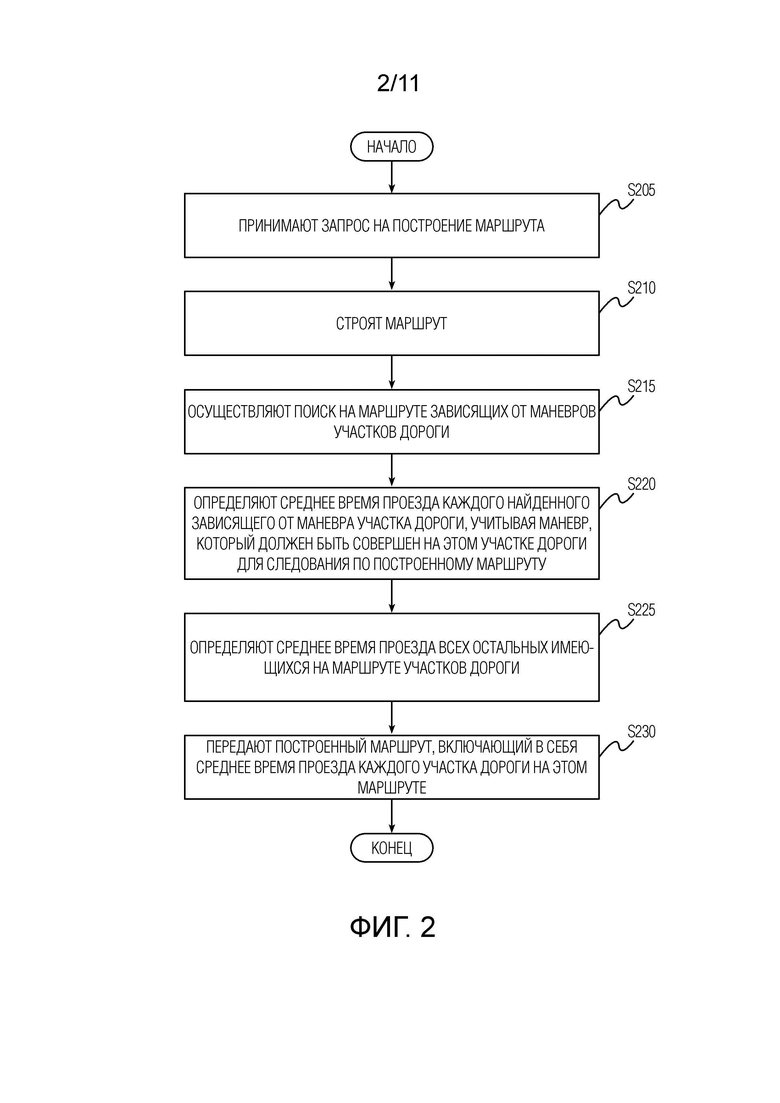
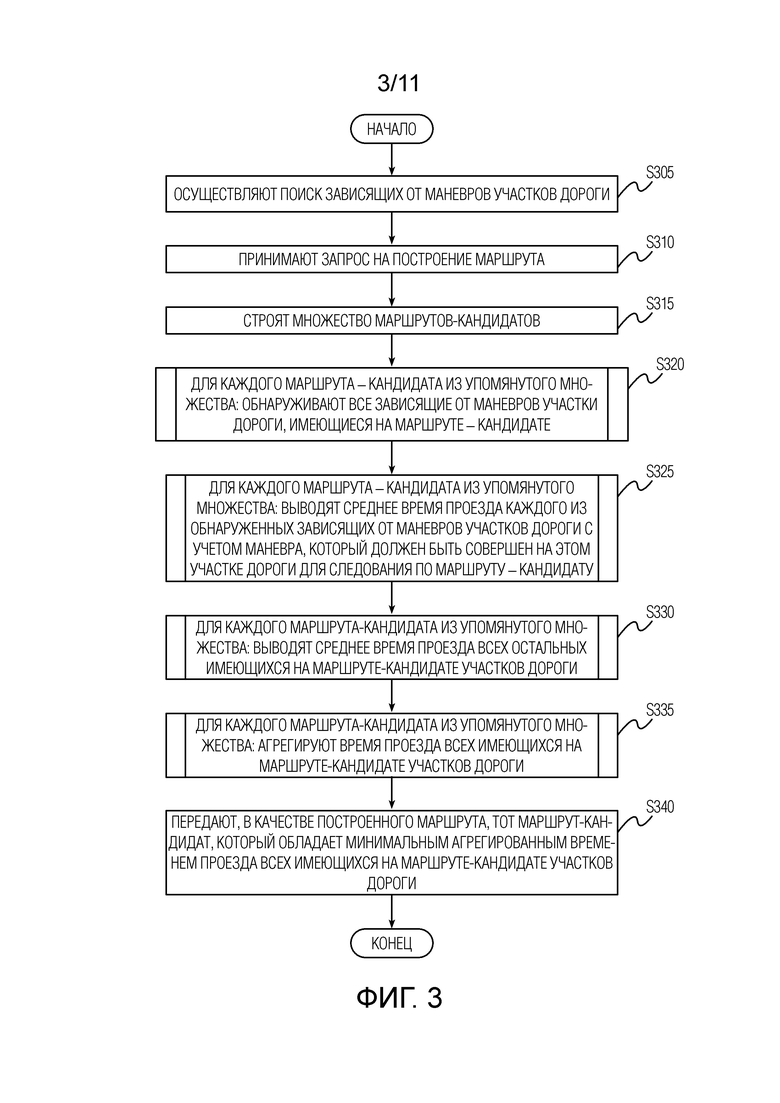
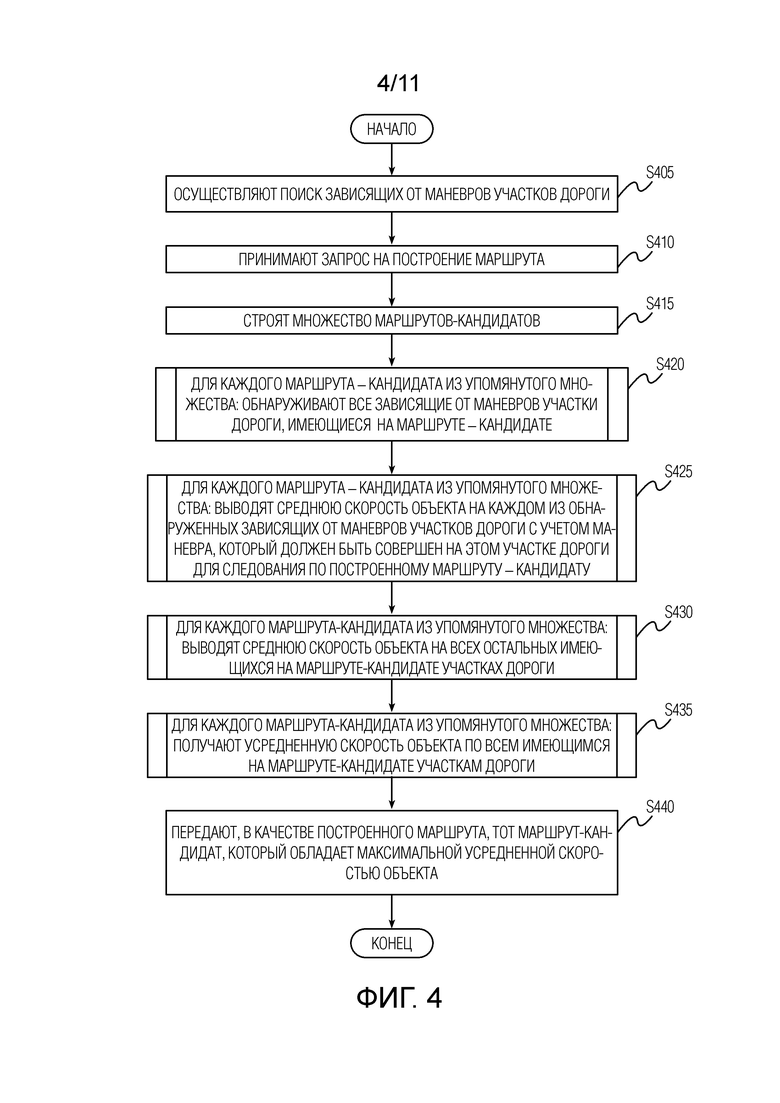
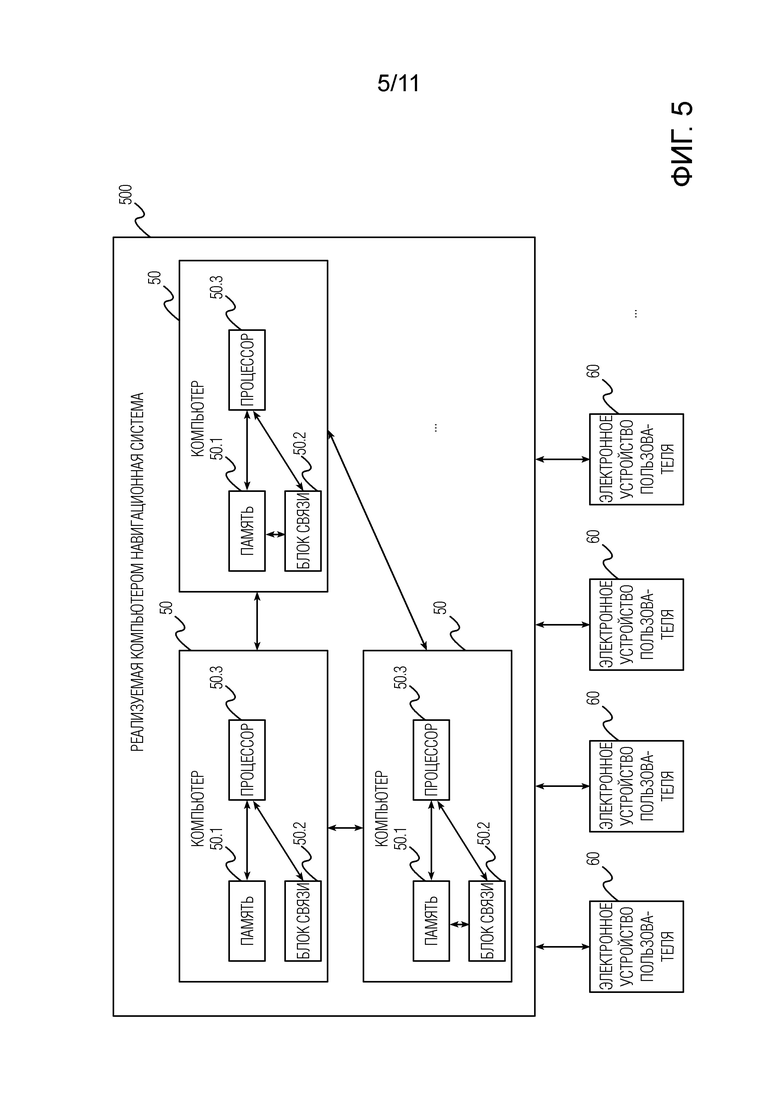
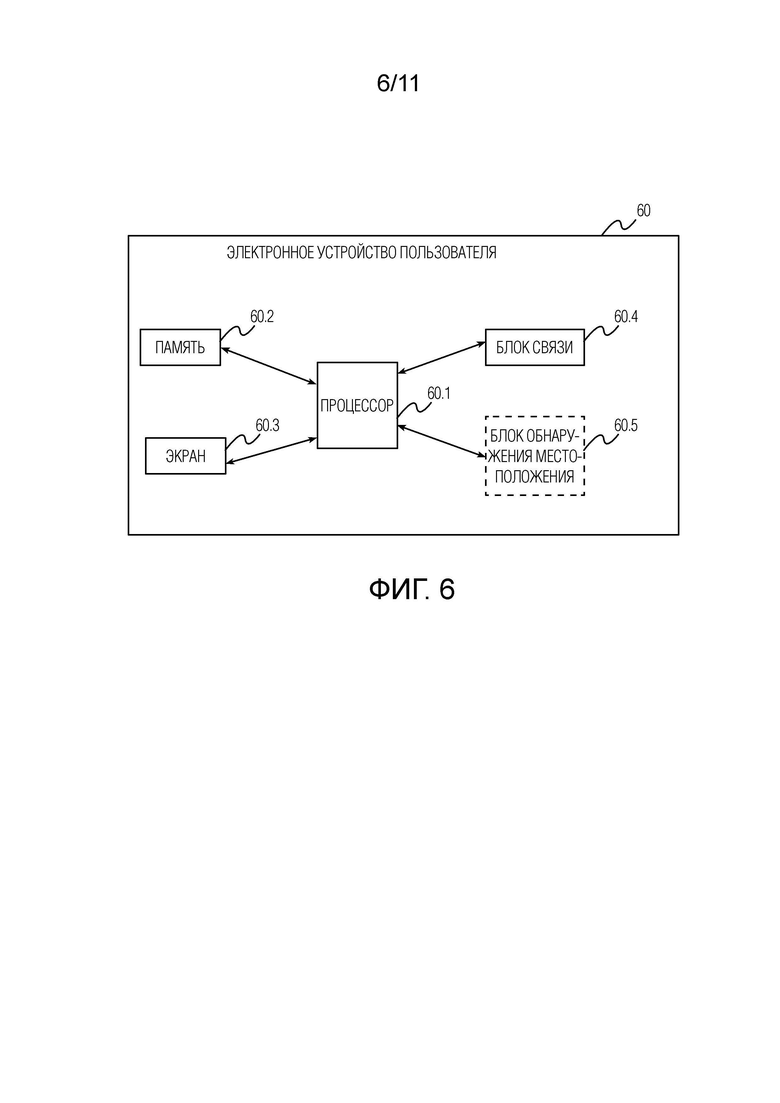

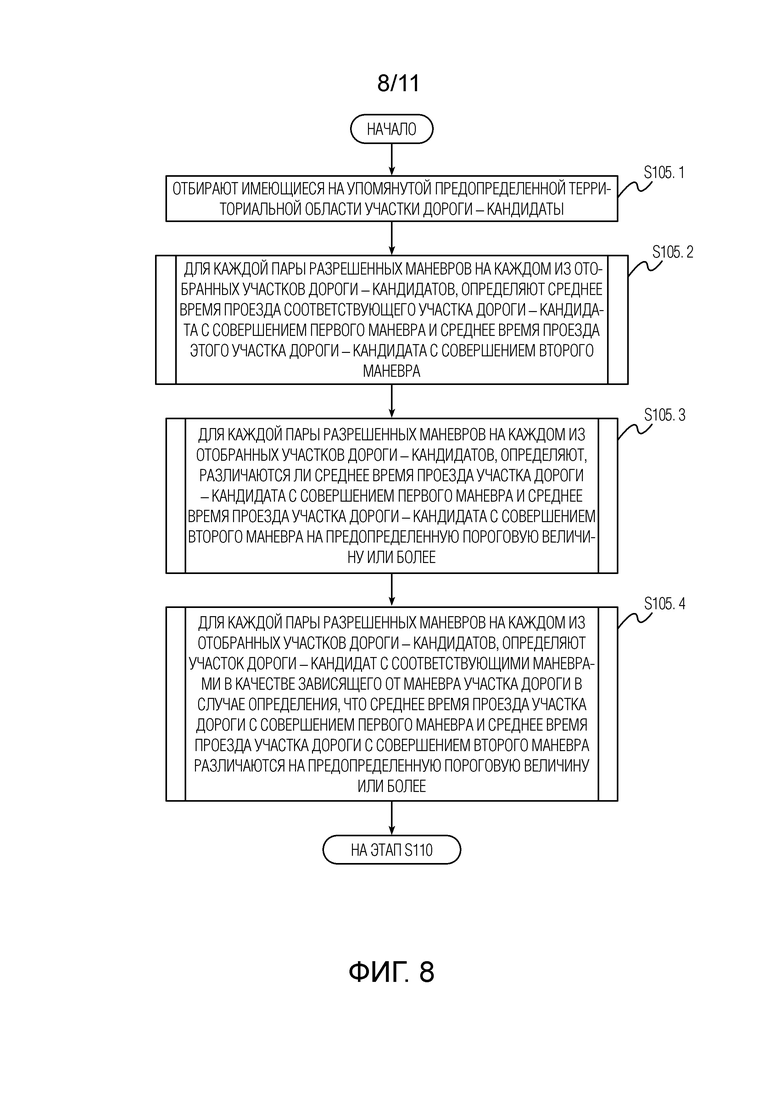
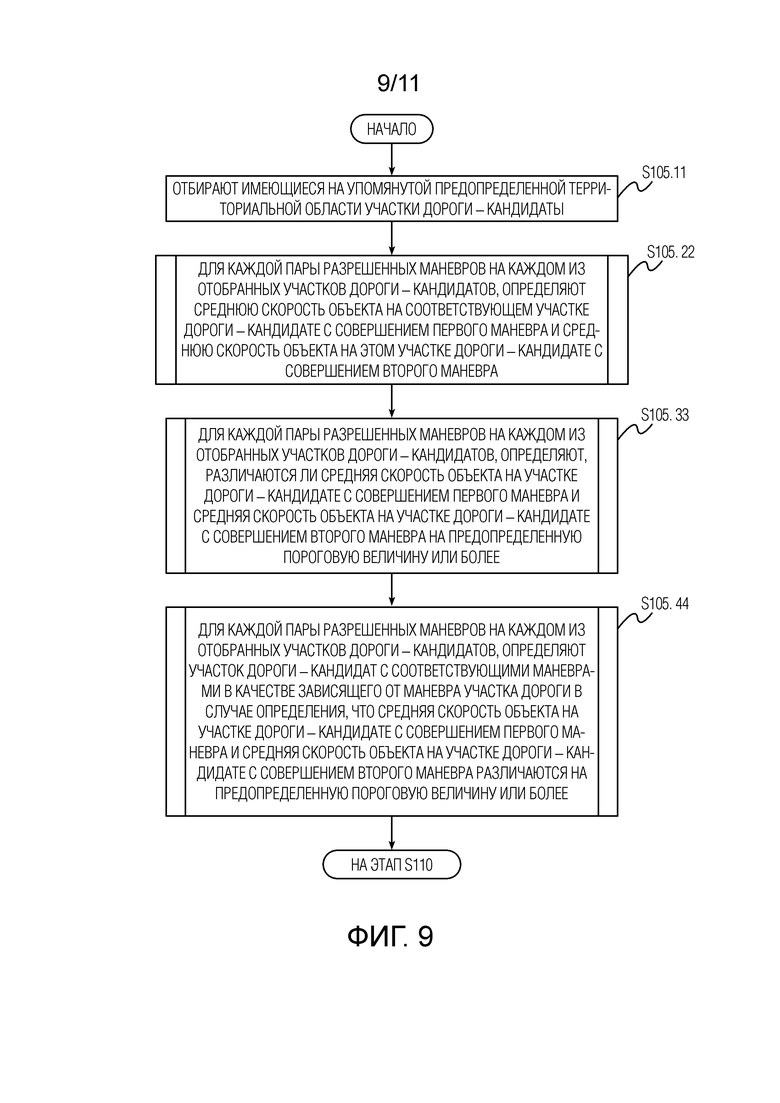
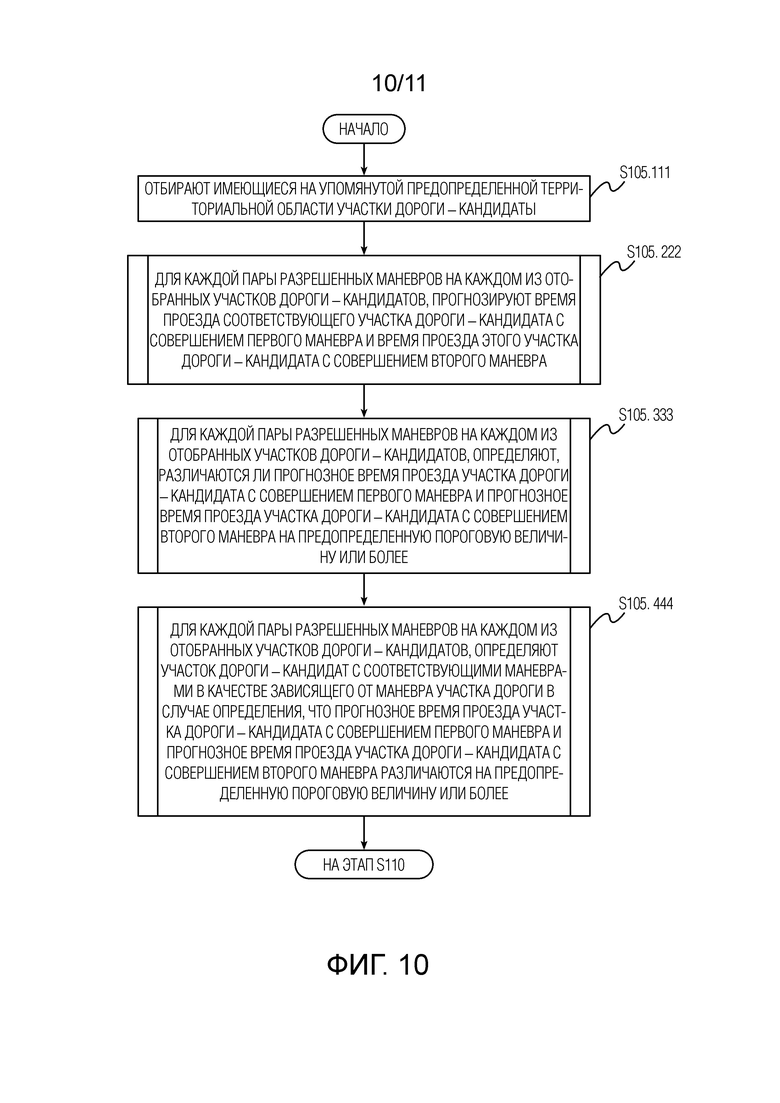

Группа изобретений относится к области навигационных технологий. Реализуемый компьютером способ учета дорожного трафика и маневров движущегося объекта содержит этапы, на которых: принимают запрос на построение маршрута; строят маршрут; осуществляют поиск на маршруте зависящих от маневров участков дороги; определяют среднее время проезда каждого найденного зависящего от маневра участка дороги, учитывая маневр, который должен быть совершен на этом участке дороги для следования по построенному маршруту, и среднее время проезда всех остальных имеющихся на маршруте участков дороги, и передают построенный маршрут, в том числе среднее время проезда каждого участка дороги на этом маршруте. Технический результат – повышение точности определения времени до конца маршрута. 6 н. и 24 з.п. ф-лы, 11 ил.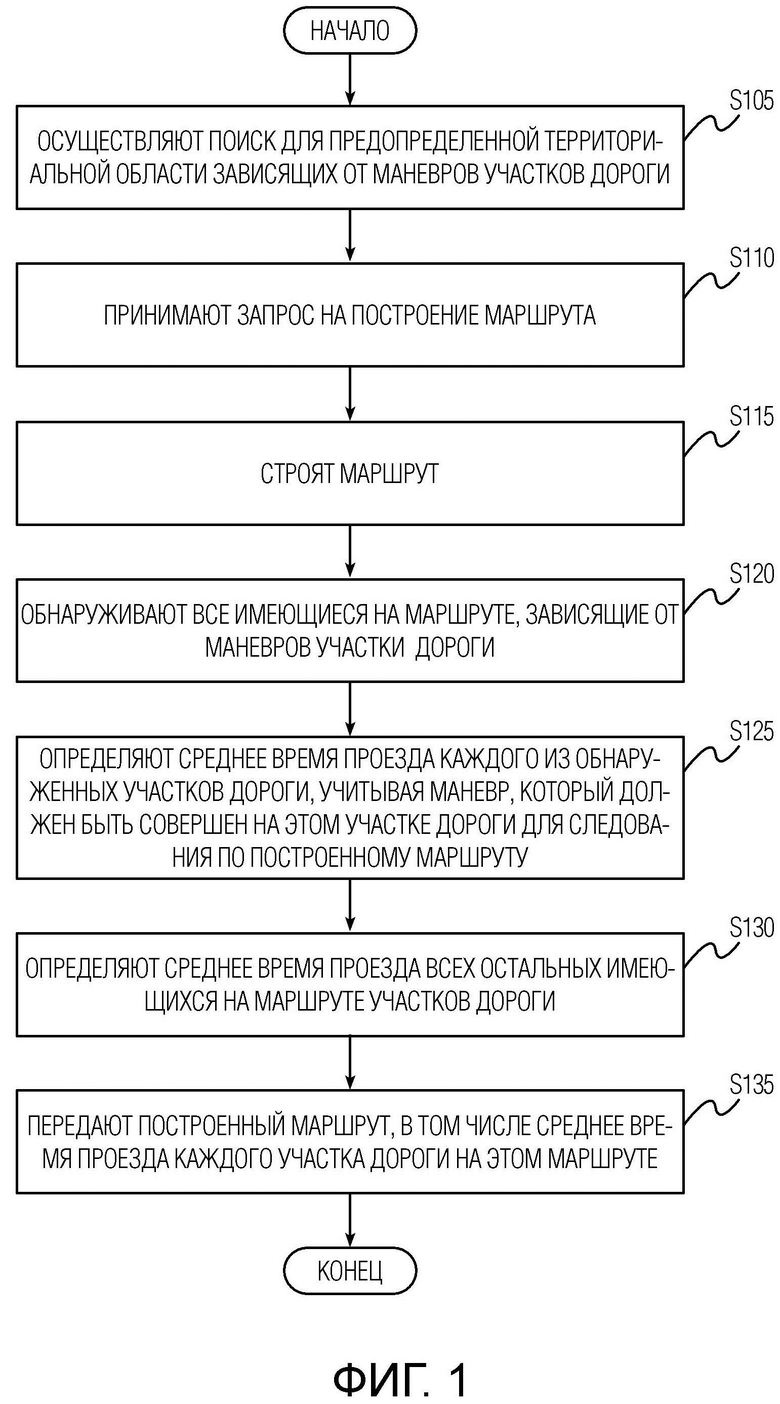
1. Реализуемый компьютером способ учета дорожного трафика и маневров движущегося объекта при определении времени до конца маршрута, содержащий этапы, на которых:
осуществляют поиск (S105) для предопределенной территориальной области зависящих от маневров участков дороги, на которых разрешены по меньшей мере два маневра и время проезда которых отличается в зависимости от того, какой из упомянутых по меньшей мере двух маневров на каждом из них совершается;
принимают (S110) запрос на построение маршрута, проходящего через упомянутую предопределенную территориальную область;
строят (S115) маршрут;
обнаруживают (S120) все имеющиеся на маршруте, зависящие от маневров участки дороги;
причем для обнаружения всех имеющихся на маршруте зависящих от маневров участков дороги:
отбирают (S105.111) имеющиеся на упомянутой предопределенной территориальной области участки дороги – кандидаты, каждый из которых имеет по меньшей мере два разрешенных маневра;
для каждой пары маневров из по меньшей мере двух маневров, разрешенных на каждом из отобранных участков дороги – кандидатов:
прогнозируют (S105.222) скорость объекта на соответствующем участке дороги – кандидате или время проезда соответствующего участка дороги – кандидата с совершением первого маневра из упомянутой пары маневров и скорость объекта на этом участке дороги – кандидате или время проезда этого участка дороги – кандидата с совершением второго маневра из упомянутой пары маневров, при этом
определяют (S105.333), различаются ли скорость объекта на соответствующем участке дороги – кандидате или время проезда соответствующего участка дороги – кандидата с совершением первого маневра и скорость объекта на соответствующем участке дороги – кандидате или время проезда соответствующего участка дороги – кандидата с совершением второго маневра на предопределенную пороговую величину или более;
определяют (S105.444) данный участок дороги с соответствующими маневрами в качестве зависящего от маневра участка дороги, если скорость объекта на соответствующем участке дороги – кандидате или время проезда соответствующего участка дороги – кандидата с совершением первого маневра и скорость объекта на соответствующем участке дороги – кандидате или время проезда соответствующего участка дороги – кандидата с совершением второго маневра различаются на предопределенную пороговую величину или более,
определяют (S125) среднее время проезда каждого из обнаруженных имеющихся на маршруте, зависящих от маневров участков дороги с учетом маневра, который должен быть совершен на соответствующем участке дороги для следования по построенному маршруту, при этом такое среднее время проезда определяется на основе наиболее актуальных данных о времени проезда за предопределенный промежуток времени, выводимых из данных местоположений от множества объектов, которые ранее совершили аналогичный маневр на данном участке дороги; и определяют (S130) среднее время проезда всех остальных имеющихся на маршруте участков дороги на основе наиболее актуальных данных о времени проезда за предопределенный промежуток времени, выводимых из данных местоположений от множества объектов, которые ранее проехали данный участок дороги; и
передают (S135) построенный маршрут, включающий в себя среднее время проезда каждого участка дороги на этом маршруте.
2. Способ по п. 1, в котором запрос на построение маршрута принимают (S110) от электронного устройства пользователя и построенный маршрут передают (S135) на электронное устройство пользователя.
3. Способ по п. 1, в котором этап обнаружения (S120) всех имеющихся на маршруте, зависящих от маневров участков дороги содержит подэтапы, на которых:
определяют на маршруте цепочку из следующих непосредственно друг за другом двух или более зависящих от маневров участков дороги; и
обрабатывают эту определенную цепочку как один имеющийся на маршруте, зависящий от маневров участок дороги.
4. Способ по п. 1, в котором прогнозирование (S105.222) времени проезда соответствующего участка дороги – кандидата и/или прогнозирование (S105.2222) скорости объекта на соответствующем участке дороги – кандидате выполняют с использованием модели машинного обучения на основе случайного леса решающих деревьев или на основе градиентного бустинга решающих деревьев, или с использованием нейросетевой модели.
5. Способ по п. 1, в котором один или более из этапа поиска (S105) зависящих от маневров участков дороги, этапа построения (S115) маршрута, этапа обнаружения (S120) всех имеющихся на маршруте, зависящих от маневров участков дороги и этапов определения (S125, S130) времени проезда осуществляется с использованием, по меньшей мере, дорожного графа, который строится для упомянутой предопределенной территориальной области и регулярно обновляется,
при этом дорожный граф содержит множество связанных рёбрами узлов, причем каждому ребру и/или каждому узлу в дорожном графе сопоставлен уникальный идентификатор и относящаяся к характеристике дороги информация для соответствующего ребра и/или узла.
6. Способ по п. 1, в котором запрос на построение маршрута содержит начальную точку маршрута и конечную точку маршрута.
7. Способ по п. 6, в котором запрос на построение маршрута дополнительно содержит одну или несколько промежуточных точек маршрута.
8. Способ по п. 1, в котором,
- в случае приема от электронного устройства пользователя запроса на обновление данных о маршруте, причем этот запрос содержит данные текущего местоположения электронного устройства пользователя, или
- на регулярной основе до тех пор, пока электронное устройство пользователя не передаст данные текущего местоположения электронного устройства, указывающие конечную точку маршрута,
выполняют следующие этапы, на которых:
обнаруживают все имеющиеся на оставшемся маршруте, зависящие от маневров участки дороги;
определяют среднее время проезда каждого из обнаруженных оставшихся на маршруте, зависящих от маневров участков дороги с учетом маневра, который должен быть совершен на этом участке дороги для следования по оставшемуся маршруту, при этом такое среднее время проезда определяется на основе наиболее актуальных данных о времени проезда за предопределенный промежуток времени, выводимых из обезличенных данных местоположений от множества объектов, которые ранее совершили аналогичный маневр на данном участке дороги;
определяют среднее время проезда всех остальных имеющихся на оставшемся маршруте участков дороги на основе наиболее актуальных данных о времени проезда за предопределенный промежуток времени, выводимых из обезличенных данных местоположений от множества объектов, которые ранее проехали данный участок дороги; и
передают на электронное устройство пользователя обновленное среднее время проезда каждого участка дороги на оставшемся маршруте.
9. Способ по п. 8, в котором, в случае определения среднего времени проезда предопределенного числа оставшихся на маршруте участков дороги, которое отличается от изначально определенного среднего времени проезда соответствующих участков дороги на предопределенную пороговую величину или более, повторно строят маршрут.
10. Способ по п. 9, в котором, в случае если повторно построенный маршрут отличается от оставшейся части изначально построенного маршрута, передают на электронное устройство пользователя перестроенный маршрут, в том числе среднее время проезда каждого участка дороги на этом перестроенном маршруте.
11. Способ по п. 1, в котором по меньшей мере двумя маневрами, имеющимися на каждом зависящем от маневров участке дороги, являются маневры, разрешенные на этом зависящем от маневров участке дороги правилами дорожного движения.
12. Способ по п. 1, в котором каждый зависящий от маневра участок дороги включает в себя часть дороги до маневра и часть дороги после маневра.
13. Способ по п. 1, в котором маршрут строят, оптимизируя одно или несколько из времени до конца маршрута, расстояния до конца маршрута, количества маневров до конца маршрута, количества светофоров до конца маршрута.
14. Способ по п. 13, при построении (S115) маршрута выполняют этапы, на которых:
на основе запроса на построение маршрута определяют множество маршрутов – кандидатов,
для каждого маршрута – кандидата из упомянутого множества маршрутов – кандидатов:
- обнаруживают все имеющиеся на маршруте – кандидате, зависящие от маневров участки дороги;
- определяют среднее время проезда каждого из обнаруженных имеющихся на маршруте – кандидате, зависящих от маневров участков дороги с учетом маневра, который должен быть совершен на этом участке дороги для следования по построенному маршруту – кандидату, при этом такое среднее время проезда определяется на основе наиболее актуальных данных о времени проезда за предопределенный промежуток времени, выводимых из обезличенных данных местоположений от множества объектов, которые ранее совершили аналогичный маневр на данном участке дороги;
- определяют среднее время проезда всех остальных имеющихся на маршруте – кандидате участков дороги на основе наиболее актуальных данных о времени проезда за предопределенный промежуток времени, выводимых из обезличенных данных местоположений от множества объектов, которые ранее проехали данный участок дороги; и
- агрегируют время проезда всех имеющихся на маршруте – кандидате участков дороги;
в качестве построенного маршрута используют тот маршрут – кандидат из упомянутого множества маршрутов – кандидатов, который обладает минимальным агрегированным временем проезда всего маршрута.
15. Способ по п. 13, при построении (S115) маршрута выполняют этапы, на которых:
на основе запроса на построение маршрута определяют множество маршрутов – кандидатов,
для каждого маршрута – кандидата из упомянутого множества маршрутов – кандидатов:
- обнаруживают все имеющиеся на маршруте – кандидате, зависящие от маневра участки дороги;
- определяют среднюю скорость объекта на каждом из обнаруженных имеющихся на маршруте – кандидате, зависящих от маневров участков дороги с учетом маневра, который должен быть совершен на этом участке дороги для следования по построенному маршруту – кандидату, при этом такая средняя скорость объекта определяется на основе наиболее актуальных данных о скорости объектов за предопределенный промежуток времени, выводимых из обезличенных данных местоположений от множества объектов, которые ранее совершили аналогичный маневр на данном участке дороги;
- определяют среднюю скорость объекта на всех остальных имеющихся на маршруте – кандидате участках дороги на основе наиболее актуальных данных о скорости объектов за предопределенный промежуток времени, выводимых из обезличенных данных местоположений от множества объектов, которые ранее проехали данный участок дороги; и
- получают усредненную скорость объекта по всем имеющимся на маршруте – кандидате участкам дороги;
в качестве построенного маршрута используют тот маршрут – кандидат из упомянутого множества маршрутов – кандидатов, который обладает максимальной усредненной скоростью объекта.
16. Способ по п. 1, в котором упомянутые остальные имеющиеся на маршруте участки дороги включают в себя не зависящие от маневров участки дороги,
причем каждый не зависящий от маневра участок дороги является либо участком дороги, содержащим единственный разрешенный маневр, либо содержащим разрешенные маневры участком дороги, для которого среднее время проезда этого участка дороги или средняя скорость объекта на этом участке дороги с совершением маневра для следования по построенному маршруту в настоящий момент не отличается соответственно от среднего времени проезда этого участка дороги или средней скорости объекта на этом участке дороги с совершением каждого другого разрешенного на этом участке дороги маневра на предопределенную пороговую величину или более.
17. Способ по любому из пп. 1, 8, 14, 15, в котором предопределенным промежутком времени сбора наиболее актуальных данных является последние три часа или менее, предпочтительно последние два часа или менее, еще более предпочтительно последний час или менее, еще более предпочтительно последние полчаса или менее, еще более предпочтительно последние 15 минут или менее, наиболее предпочтительно 5 минут или менее.
18. Способ по любому из пп. 1, 8, 14, 15, при отсутствии обезличенных данных местоположений за предопределенный промежуток времени, предопределенный промежуток времени постепенно расширяют до тех пор, пока не будет получен достаточный объем обезличенных данных местоположений для выведения наиболее актуальных данных о времени проезда и/или данных о скорости объектов.
19. Способ по п. 1, в котором электронным устройством пользователя является электронное устройство, находящееся в объекте пользователя или являющееся компонентом объекта пользователя.
20. Способ по любому из пп. 1, 8, 14, 15, в котором обезличенные данные местоположений, полученные от множества объектов, включают в себя как обезличенные данные местоположений, полученные от электронных устройств, находящихся в объектах, так и обезличенные данные местоположений, полученные от электронных устройств, являющихся компонентами объектов.
21. Способ по любому из пп. 1, 8, 14, 15, в котором данные местоположений от множества объектов, которые ранее совершили определенный маневр на определенном участке дороги, представляют собой последовательности распределенных во времени сигналов системы глобального позиционирования, привязанных к дорожному графу на этом участке дороги,
причем последовательность распределенных во времени сигналов системы глобального позиционирования от одного объекта отделима от последовательности распределенных во времени сигналов системы глобального позиционирования от другого объекта посредством присвоения этим последовательностям разных обезличенных идентификаторов объектов.
22. Способ по любому из пп. 9 или 16, в котором предопределенной пороговой величиной различия является 1/10, более предпочтительно 1/9, более предпочтительно 1/8, более предпочтительно 1/7, более предпочтительно 1/6, более предпочтительно 1/5, более предпочтительно 1/4, еще более предпочтительно 1/3, наиболее предпочтительно 1/2 или более в относительном или абсолютном выражении.
23. Способ по любому из пп. 1, 8, 14, 14, 18, 20, 21, дополнительно содержащий этап, на котором устраняют шум из обезличенных данных местоположений от объектов.
24. Способ по любому из пп. 1, 8, 14, 15, 16, 18, 19, 20, 21, 23, в котором движущимся объектом является транспортное средство или его компонент, или электронное устройство пользователя, двигающееся вместе с транспортным средством.
25. Реализуемый компьютером способ учета дорожного трафика и маневров движущегося объекта при определении времени до конца маршрута, содержащий этапы, на которых:
принимают (S205) запрос на построение маршрута, проходящего через предопределенную территориальную область;
строят (S210) маршрут;
осуществляют поиск (S215) на маршруте зависящих от маневров участков дороги, на которых разрешены по меньшей мере два маневра и время проезда которых отличается в зависимости от того, какой из упомянутых по меньшей мере двух маневров на каждом из них совершается;
причем для обнаружения всех имеющихся на маршруте зависящих от маневров участков дороги:
отбирают (S105.111) имеющиеся на упомянутой предопределенной территориальной области участки дороги – кандидаты, каждый из которых имеет по меньшей мере два разрешенных маневра;
для каждой пары маневров из по меньшей мере двух маневров, разрешенных на каждом из отобранных участков дороги – кандидатов:
прогнозируют (S105.222) скорость объекта на соответствующем участке дороги – кандидате или время проезда соответствующего участка дороги – кандидата с совершением первого маневра из упомянутой пары маневров и скорость объекта на этом участке дороги – кандидате или время проезда этого участка дороги – кандидата с совершением второго маневра из упомянутой пары маневров, при этом
определяют (S105.333), различаются ли скорость объекта на соответствующем участке дороги – кандидате или время проезда соответствующего участка дороги – кандидата с совершением первого маневра и скорость объекта на соответствующем участке дороги – кандидате или время проезда соответствующего участка дороги – кандидата с совершением второго маневра на предопределенную пороговую величину или более;
определяют (S105.444) данный участок дороги с соответствующими маневрами в качестве зависящего от маневра участка дороги, если скорость объекта на соответствующем участке дороги – кандидате или время проезда соответствующего участка дороги – кандидата с совершением первого маневра и скорость объекта на соответствующем участке дороги – кандидате или время проезда соответствующего участка дороги – кандидата с совершением второго маневра различаются на предопределенную пороговую величину или более,
определяют (S220) среднее время проезда каждого найденного зависящего от маневра участка дороги, учитывая маневр, который должен быть совершен на этом участке дороги для следования по построенному маршруту, при этом такое среднее время проезда определяется на основе наиболее актуальных данных о времени проезда за предопределенный промежуток времени, выводимых из данных местоположений от множества объектов, которые ранее совершили аналогичный маневр на данном участке дороги; и
определяют (S225) среднее время проезда всех остальных имеющихся на маршруте участков дороги на основе наиболее актуальных данных о времени проезда за предопределенный промежуток времени, выводимых из данных местоположений от множества объектов, которые ранее проехали данный участок дороги; и
передают (S230) построенный маршрут, в том числе среднее время проезда каждого участка дороги на этом маршруте.
26. Реализуемый компьютером способ построения маршрута с учетом дорожного трафика и маневров движущегося объекта, содержащий этапы, на которых:
осуществляют поиск (S305) зависящих от маневров участков дороги, на которых разрешены по меньшей мере два маневра и время проезда которых отличается в зависимости от того, какой из упомянутых по меньшей мере двух маневров совершается;
принимают (S310) запрос на построение маршрута;
строят (S315) множество маршрутов – кандидатов,
для каждого маршрута – кандидата из упомянутого множества маршрутов – кандидатов:
обнаруживают (S320) все зависящие от маневров участки дороги, имеющиеся на маршруте – кандидате;
причем для обнаружения всех имеющихся на маршруте зависящих от маневров участков дороги:
отбирают (S105.111) имеющиеся на упомянутой предопределенной территориальной области участки дороги – кандидаты, каждый из которых имеет по меньшей мере два разрешенных маневра;
для каждой пары маневров из по меньшей мере двух маневров, разрешенных на каждом из отобранных участков дороги – кандидатов:
прогнозируют (S105.222) скорость объекта на соответствующем участке дороги – кандидате или время проезда соответствующего участка дороги – кандидата с совершением первого маневра из упомянутой пары маневров и скорость объекта на этом участке дороги – кандидате или время проезда этого участка дороги – кандидата с совершением второго маневра из упомянутой пары маневров, при этом
определяют (S105.333), различаются ли скорость объекта на соответствующем участке дороги – кандидате или время проезда соответствующего участка дороги – кандидата с совершением первого маневра и скорость объекта на соответствующем участке дороги – кандидате или время проезда соответствующего участка дороги – кандидата с совершением второго маневра на предопределенную пороговую величину или более;
определяют (S105.444) данный участок дороги с соответствующими маневрами в качестве зависящего от маневра участка дороги, если скорость объекта на соответствующем участке дороги – кандидате или время проезда соответствующего участка дороги – кандидата с совершением первого маневра и скорость объекта на соответствующем участке дороги – кандидате или время проезда соответствующего участка дороги – кандидата с совершением второго маневра различаются на предопределенную пороговую величину или более,
выводят (S325) среднее время проезда каждого из обнаруженных зависящих от маневров участков дороги с учетом маневра, который должен быть совершен на этом участке дороги для следования по построенному маршруту – кандидату, из данных местоположений от объектов, ранее совершивших за предопределенный промежуток времени аналогичный маневр на данном участке дороги;
выводят (S330) среднее время проезда всех остальных имеющихся на маршруте – кандидате участков дороги из данных местоположений от объектов, ранее проехавших данный участок дороги; и
агрегируют (S335) время проезда всех имеющихся на маршруте – кандидате участков дороги;
передают (S340), в качестве построенного маршрута, тот маршрут – кандидат, который обладает минимальным агрегированным временем проезда всех имеющихся на маршруте – кандидате участков дороги, а также среднее время проезда каждого участка дороги на этом маршруте.
27. Реализуемый компьютером способ построения маршрута с учетом дорожного трафика и маневров движущегося объекта, содержащий этапы, на которых:
осуществляют поиск (S405) зависящих от маневров участков дороги, на которых разрешены по меньшей мере два маневра и время проезда которых отличается в зависимости от того, какой из упомянутых по меньшей мере двух маневров совершается;
принимают (S410) запрос на построение маршрута;
строят (S415) множество маршрутов – кандидатов,
для каждого маршрута – кандидата из упомянутого множества маршрутов – кандидатов:
обнаруживают (S420) все зависящие от маневров участки дороги, имеющиеся на маршруте – кандидате;
причем для обнаружения всех имеющихся на маршруте зависящих от маневров участков дороги:
отбирают (S105.111) имеющиеся на упомянутой предопределенной территориальной области участки дороги – кандидаты, каждый из которых имеет по меньшей мере два разрешенных маневра;
для каждой пары маневров из по меньшей мере двух маневров, разрешенных на каждом из отобранных участков дороги – кандидатов:
прогнозируют (S105.222) скорость объекта на соответствующем участке дороги – кандидате или время проезда соответствующего участка дороги – кандидата с совершением первого маневра из упомянутой пары маневров и скорость объекта на этом участке дороги – кандидате или время проезда этого участка дороги – кандидата с совершением второго маневра из упомянутой пары маневров, при этом
определяют (S105.333), различаются ли скорость объекта на соответствующем участке дороги – кандидате или время проезда соответствующего участка дороги – кандидата с совершением первого маневра и скорость объекта на соответствующем участке дороги – кандидате или время проезда соответствующего участка дороги – кандидата с совершением второго маневра на предопределенную пороговую величину или более;
определяют (S105.444) данный участок дороги с соответствующими маневрами в качестве зависящего от маневра участка дороги, если скорость объекта на соответствующем участке дороги – кандидате или время проезда соответствующего участка дороги – кандидата с совершением первого маневра и скорость объекта на соответствующем участке дороги – кандидате или время проезда соответствующего участка дороги – кандидата с совершением второго маневра различаются на предопределенную пороговую величину или более,
выводят (S425) среднюю скорость объекта на каждом из обнаруженных зависящих от маневров участков дороги с учетом маневра, который должен быть совершен на этом участке дороги для следования по построенному маршруту – кандидату, из данных местоположений от объектов, ранее совершивших за предопределенный промежуток времени аналогичный маневр на данном участке дороги;
выводят (S430) среднюю скорость объекта на всех остальных имеющихся на маршруте – кандидате участках дороги из данных местоположений от объектов, ранее проехавших данный участок дороги; и
получают (S435) усредненную скорость объекта по всем имеющимся на маршруте – кандидате участкам дороги;
передают (S440), в качестве построенного маршрута, тот маршрут – кандидат, который обладает максимальной усредненной скоростью объекта, а также среднюю скорость объекта на каждом участке дороги на этом маршруте.
28. Реализуемая компьютером навигационная система (500), учитывающая дорожный трафик и маневры движущихся объектов, содержащая:
один или более компьютеров (50), каждый из которых содержит память (50.1), хранящую исполняемые процессором инструкции, блок связи (50.2), выполненный с возможностью осуществления связи с электронными устройствами (60) пользователей, и процессор (50.3), выполненный с возможностью исполнения упомянутых исполняемых процессором инструкций для выполнения способа по любому из пп. 1-24, или способа по п. 25, или способа по п. 26, или способа по п. 27;
причем память дополнительно выполнена с возможностью хранения регулярно обновляемого дорожного графа, регулярно обновляемых зависящих/не зависящих от маневров участков дороги и исторических данных местоположений электронных устройств пользователей;
причем блок связи выполнен с возможностью приема от электронных устройств пользователей запросов на построение/обновление маршрутов и данных местоположений электронных устройств пользователей, и передачи на соответствующие электронные устройства пользователей, в ответ на соответствующие запросы на построение/обновление маршрутов, построенные/обновленные маршруты, в том числе среднее время проезда или среднюю скорость объекта на каждом участке дороги для каждого маршрута.
29. Электронное устройство (60) пользователя для осуществления навигации по маршруту, содержащее процессор (60.1), память (60.2), экран (60.3) и блок (60.4) связи,
причем блок связи выполнен с возможностью передачи в реализуемую компьютером навигационную систему (500) по п. 28 вводимого пользователем запроса на построение/обновление маршрута, проходящего через предопределенную территориальную область и содержащего по меньшей мере начальную точку маршрута и конечную точку маршрута, и приема от упомянутой системы построенного/обновленного маршрута, включающего в себя среднее время проезда или среднюю скорость объекта на каждом не зависящем от маневра участке дороги и каждом зависящем от маневра участке дороги на этом маршруте;
память выполнена с возможностью хранения построенного/обновленного маршрута и дорожной карты для упомянутой предопределенной карты территориальной области; и
процессор выполнен с возможностью обработки построенного/обновленного маршрута и дорожной карты для представления на экране построенного/обновленного маршрута на карте, причем каждый не зависящий от маневра участок дороги построенного/обновленного маршрута представляют на карте на основе соответствующего среднего времени проезда или средней скорости объекта на этом участке дороги, а каждый зависящий от маневра участок дороги построенного/обновленного маршрута представляют на карте на основе соответствующего среднего времени проезда или средней скорости объекта, определенного/определенной с учетом маневра, подлежащего совершению на этом участке дороги для следования по маршруту.
30. Электронное устройство пользователя для осуществления навигации по маршруту по п. 28, дополнительно содержащее блок (60.5) обнаружения местоположения, при этом процессор дополнительно выполнен с возможностью, при обнаружении блоком обнаружения местоположения изменения местоположения, побуждать блок связи передавать в упомянутую систему обезличенные данные местоположений на регулярной основе до тех пор, пока блоком обнаружения местоположения не будет обнаружено местоположение, по существу соответствующее конечной точке маршрута.
| KR 20190058943 A, 30.05.2019 | |||
| US 2015262480 A1, 17.09.2015 | |||
| US 2019025841 A1, 24.01.2019 | |||
| US 2020240794 A1, 30.07.2020 | |||
| US 2020258381 A1, 13.08.2020 | |||
| СПОСОБ И СИСТЕМА СОЗДАНИЯ ИНФОРМАЦИИ О ТРАФИКЕ, КОТОРАЯ БУДЕТ ИСПОЛЬЗОВАНА В КАРТОГРАФИЧЕСКОМ ПРИЛОЖЕНИИ, ВЫПОЛНЯЕМОМ НА ЭЛЕКТРОННОМ УСТРОЙСТВЕ | 2017 |
|
RU2664034C1 |
| СПОСОБ И СЕРВЕР СОЗДАНИЯ ПРОГНОЗОВ ТРАФИКА | 2017 |
|
RU2677164C2 |

