Изобретение относится к области автоматизированного управления движением рельсовых транспортных средств, в частности к способам формирования оптимального профиля скорости движения рельсовых транспортных средств преимущественно в условиях населенного пункта.
Одним из аналогов предложенного технического решения является [Бикмаев Р.Р., Полукаров А.А., Садеков Р.Н. Определение местоположения наземного транспортного средства с использованием монокамеры и дорожных знаков с геодезической привязкой. В сборнике: XXVII Санкт-Петербургская международная конференция по интегрированным навигационным системам. Сборник материалов. 2020. С. 341-345.]. Суть подхода заключается в распознавании дорожных знаков, сравнении полученных данных с картой и корректировку навигационной системы. Распознавание дорожных знаков производиться на основе нейронной сети, при этом сеть не только распознает дорожный знак, но и классифицирует его, данная информация может быть использована для создания профиля маршрута, поскольку позволяет оценить разрешенную скорость объекта на участке. Однако недостатками такого подхода применительно к рельсовому транспорту являются:
- принципиальное ограниченное действие дорожных знаков (до перекрестков) которые система никак не распознает;
- невозможность нейронной сети распознавать дорожные знаки, используемые для трамвайного транспорта в силу их размещения на проводах и отсутствия единых стандартов по их разметке;
- принципиальную невозможность определить скорость на других участках маршрута, не выраженных знаками, например, движение под мостом, пересечение стрелок и др.
Другим аналогом является [Садеков Р.Н., Асатрян К.А., Прун В.Е., Постников В.В., Кирдяшов Ф.Г., Корень М.Р. Распознавание дорожных знаков на панорамных снимках для создания навигационных карт. в сборнике: хxiv санкт-петербургская международная конференция по интегрированным навигационным системам. Сборник материалов. Главный редактор В.Г. Пешехонов. 2017. С. 111-117]. Суть подхода заключается в распознавании дорожных знаков, на панорамных снимках, получаемых с сайта google по известным координатам. Распознавание дорожных знаков производиться нейронной сетью, при этом сеть не только распознает дорожный знак, но и классифицирует его, данная информация может быть использована для создания профиля маршрута, поскольку позволяет оценить разрешенную скорость объекта на участке. Однако недостатками такого подхода применительно к рельсовому транспорту являются:
- принципиальное ограниченное действие дорожных знаков (до перекрестков) которые система никак не распознает, и как следствие невозможность определить границы участка с ограничениями;
- невозможность нейронной сети распознавать дорожные знаки, используемые для трамвайного транспорта в силу их размещения на проводах и отсутствия единых стандартов по их разметке;
- принципиальную невозможность определить скорость на других участках маршрута, не выраженных знаками, например, движение под мостом, пересечение стрелок и др.
Кроме этого, из уровня техники известенспособ определения оптимального маршрута движения транспортного средства в условиях населенного пункта(патент RU2266571, опубликован 20.12.2005, МПК G08G1/096). Изобретение относится к области управления движением транспортных средств (ТС), преимущественно инкассаторских машин, в условиях населенного пункта. На центральной станции формируют электронную карту населенного пункта и вводят в компьютер базу данных этой электронной карты. На основании предварительно полученных статистических данных о реально сложившихся скоростях движения ТС в населенном пункте устанавливают среднестатистический скоростной режим движения на каждой его дороге. Оценку этого режима осуществляют или по среднему значению скоростей, или по медиане. Путем совмещения сформированной электронной карты населенного пункта и полученных данных среднестатистического скоростного режима движения в нем создают электронную скоростную карту этого населенного пункта и вводят в память компьютера базу данных созданной электронной скоростной карты. Далее принимают навигационные информационные сообщения о координатах и скорости перемещения движущихся ТС в данном населенном пункте и фиксируют координаты и скорость движения этих ТС. На основе анализа полученных текущих навигационных информационных сообщений выделяют информационные сообщения о ТС, скорости которых группируются в области упомянутой среднестатистической оценки с учетом установленных на соответствующих дорогах скоростных ограничений. По выделенным информационным сообщениям уточняют данные о скоростях перемещения ТС на дорогах в памяти компьютера центральной станции и при необходимости корректируют электронную скоростную карту населенного пункта путем внесения уточненных значений скоростей на каждой дороге. Затем передают пользователям радиосигналы, несущие информацию об уточненных параметрах электронной скоростной карты населенного пункта. В компьютер пользователя вводят данные о пункте назначения и определяют рекомендуемые маршруты в качестве наиболее оптимальных по времени движения до заданного пункта назначения с учетом уточненных параметров электронной скоростной карты населенного пункта, принимаемой пользователем от центральной станции. При этом визуализируют на экране дисплея пользователя рекомендуемые маршруты по электронной скоростной карте населенного пункта, индицируют на ней информационные сообщения о значениях скоростей на дорогах населенного пункта и отображают текущее положение ТС. В процессе движения по выбранному маршруту в случае изменения параметров электронной скоростной карты населенного пункта производят коррекцию оптимальных маршрутов движения до пункта назначения. Дуплексную радиосвязь между центральной станцией и ТС осуществляют радиосигналами с фазовой манипуляцией на двух частотах непосредственно и/или через ретранслятор, установленный в центральной части населенного пункта. Изобретение повышает эффективность обмена дискретной информацией по радиоканалам между центральной станцией и ТС.
Так же известен способ и система управления транспортными потоками и устройство мониторинга дорожной ситуации (патент RU2477527, опубликован 10.03.2013, МПК G08G1/0969, G01C21/34). Согласно которому каждое транспортное средство оборудуют устройством мобильной связи и навигационным устройством для мониторинга текущего положения данного ТС, текущей скорости движения данного ТС и выбранного маршрута движения данного ТС и для отображения собранной информации и принимаемых рекомендаций. Территориальный центр управления движением оборудуют нахождения оптимальных рекомендаций и средствами связи. Собранную каждым навигационным устройством информацию пересылают в территориальный центр управления движением, где ее обрабатывают для нахождения оптимальных рекомендаций для каждого из ТС. Найденные оптимальные рекомендации направляют из территориального центра управления движением к соответствующим устройствам мобильной связи на ТС и отображают оптимальное решение, найденное территориальным центром управления движением для данного ТС, на соответствующем навигационном устройстве, которым оборудовано данное ТС. Использование группы изобретений при проектировании новых и совершенствовании существующих систем управления дорожным движением позволяет получить технический результат в виде расширения арсенала технических средств.
Другим известным аналогом является способ определения оптимального маршрута движения транспортного средства (патент RU2377658, опубликован 27.12.2009, МПК G08G1/0969, G01C21/34). Согласно предложенному способу формируют модельную электронную скоростную карту дорожной сети населенного пункта, отражающую среднестатистический скоростной режим движения на каждой дороге, которую вводят в память компьютера центральной станции. На указанной карте создают дорожный граф, корректируют данные дорожного графа на основе информации об измененных знаках дорожного движения. От компьютеров транспортных средств пользователей по каналу радиосвязи с заданной периодичностью передают на компьютер центральной станции актуальные значения собственных средних скоростей, по крайней мере, на одном сегменте дорожного графа и по ним определяют среднестатистический скоростной режим движения. Далее вычисляют отклонения между актуальными значениями средней и модельной скоростей на сегменте дорожного графа и по этим отклонениям формируют файлы «пробок» и «антипробок». Учитывая эти файлы и веса правых и левых поворотов, корректируют модельную электронную скоростную карту дорожной сети населенного пункта. Рекомендуемый оптимальный маршрут определяют с учетом уточненных параметров электронной скоростной карты дорожной сети населенного пункта, принимаемой абонентом от центральной станции с возможностью визуализации на экране дисплея пользователя этих маршрутов на указанной карте и отображением текущего положения транспортного средства.
Данный аналог является ближайшим и позволяет повысить точность определения оптимального по времени маршрута движения транспортного средства, однако учитываемый состав данных не позволяет осуществить расчет оптимальных скоростей с учетом ограничений возникающих на маршруте движения рельсового транспортного средства.
К общим недостаткам указанных аналогов можно отнести отсутствие данных раскрывающих ограничения и особенности, позволяющие осуществить расчет оптимального профиля скорости движения для городского общественного рельсового транспорта, таких как наличие пешеходных переходов, тоннелей и перекрестков дорог, данных раскрывающих конструктивные особенности рельсового транспортного средства: длину, количество секций, данных о профиле рельсового полотна и прочей информации позволяющей рассчитать оптимальные параметры допустимого ускорения и торможения рельсового транспортного средства.
Задачей, поставленной при разработке данногоизобретения, являлось создание способа агрегации множественных проездов по маршруту для расчёта оптимальных профилей скорости для городского рельсового транспортадля обеспечения возможности автоматизации управления движением рельсовых транспортных средств.
Технический результат, достигаемый при реализации данного изобретения,заключается в обеспечении возможности расчета оптимальной скорости движения на каждом участке маршрута (для выдачи рекомендаций экипажу и в систему автоматического управления движением), что в конечном итогеповышает безопасность движения рельсовых транспортных средств.
Указанный технический результат достигается способом агрегации множественных проездов по маршруту для расчёта оптимальных профилей скорости для городского рельсового транспорта,согласно которому на первом этапе происходит сбор GPS информации при помощи блока сбора и обработки информации установленного на транспортное средство, в память которого сохраняется информация о скорости движения транспортного средства и его координатах {vt, Bt, Lt} в каждый момент времени t, а также номере маршрута движения – i, на втором этапе в модуле обработки данных осуществляется группировка собранной информации по маршрутам и направлению, на третьем этапе на основе собранных данных в модуле обработки данных осуществляется расчет медианного значения скорости для каждой группы маршрутов в каждый момент времени t, на четвертом этапена основе расчетов и данных геоинформационной карты в модуле обработки данныхформируется электронная карта маршрута, содержащая результаты расчета медианной скорости движения с привязкой к координатам, и список выделенных участков, которые в свою очередь содержат объекты инфраструктуры, скорость проезда среди которых должна ограничиваться в соответствии с регламентами движения, при этом расчет скорости движения по выделенным участкам осуществляется в соответствии с типом транспортного средства, а также с учетом радиусов кривизны железнодорожного полотна на выделенных участках с поворотами.
Указанные технические признаки позволяют осуществить расчёт оптимальных профилей скорости движения для городского рельсового транспорта. Сбор информации для расчета реализуется при помощи блока сбора информации, устанавливаемого на рельсовое транспортное средство, и содержащего по меньшей мере GPS датчик, постоянное запоминающее устройство, оперативное запоминающее устройство и процессор. Сбор информации о скорости осуществляется в момент движения, в каждый момент времени t и координатах{vt, Bt, Lt}.
Для расчета оптимального профиля скорости движения, собранная со всех маршрутов на первом этапе информация передается в модуль обработки данных, где она группируется в соответствии с маршрутом и направлением движения. Модуль обработки данных представляет из себя вычислительное устройство с возможностью загрузки, обработки и передачи обработанных данных.
После группировки собранной информации по маршрутам и направлению, в модуле обработки информации осуществляется расчет медианной скорости движения на каждом участке движения для каждого из маршрутов и в соответствии с направлением.
Полученная медианная скорость накладывается на электронную карту, содержащую координаты движения в соответствии с маршрутом, а также на данной карте выделяются участки, содержащие объекты инфраструктуры при проезде которых на скорость движения должны быть наложены ограничения (например, пешеходные переходы, тоннели, перекрестки дорог, повороты). Расчет скорости движения на данных участках осуществляется в соответствии с типом рельсового транспортного средства, так как ограничение скорости движения накладываются на проезд всего подвижного состава, то есть ограничение должно вводится на момент проезда всеми вагонами, а не только, например, на момент проезда первого вагона состава. Также на электронной карте выделяются участки содержащие повороты, расчет скорости движения для этих участков осуществляется с учетом типа рельсового транспортного средства и радиуса кривизны дорожного полотна.
Полученные при расчетах данные, могут выдаваться экипажу рельсового транспортного средства, в качестве рекомендуемой скорости движения, а также могут быть использованы в системе автоматического управления движением.
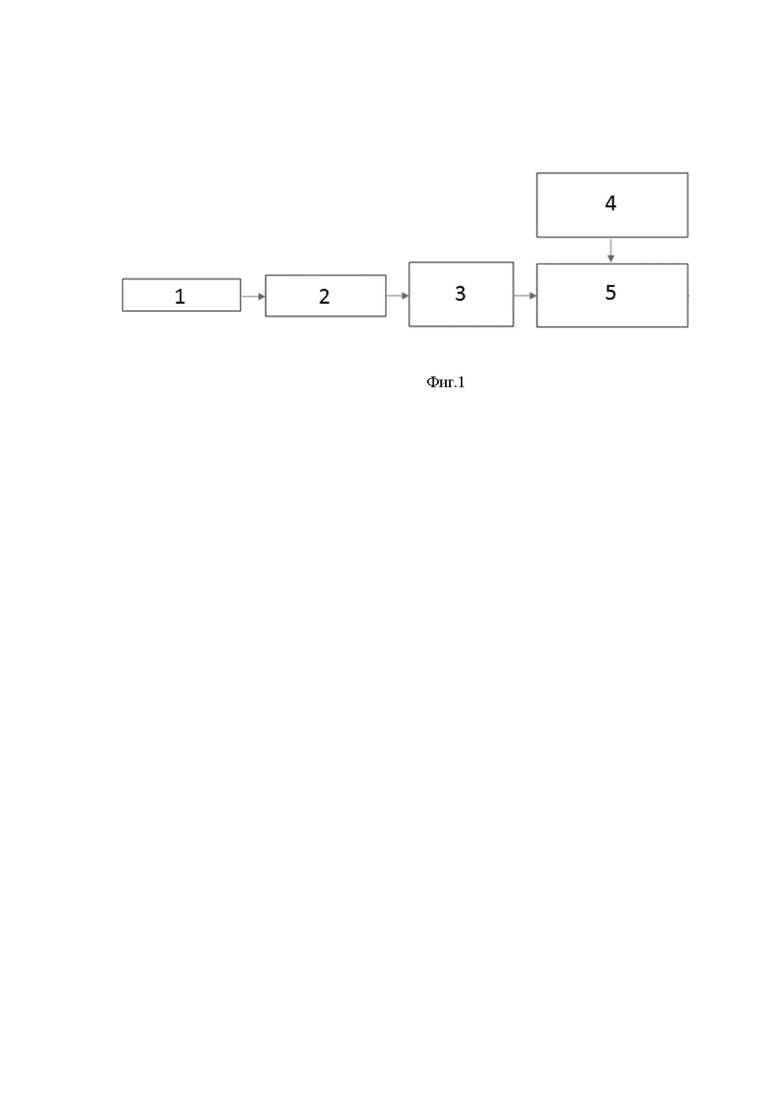
Техническая сущность изобретения поясняется чертежами. На фиг.1 изображеналгоритм осуществления способа агрегации множественных проездов по маршруту для расчёта оптимальных профилей скорости для городского рельсового транспорта, позиции которого содержат следующие шаги:
1. Сбор данных о координатах, времени и скорости движения;
2. Группировка полученных данных;
3. Вычисление медианной скорости;
4. Наложение объектов инфраструктуры на электронную карту;
5. Расчет оптимального профиля скорости.
В предпочтительном варианте исполнения изобретение осуществляется следующим образом.
На рельсовые транспортные средства устанавливаются блоки сбора данных, для осуществления сбора данных о координатах {vt, Bt, Lt}, времени t и скорости движения рельсового транспортного средства по маршруту (1). После прохождения соответствующих маршрутов, собранный данные передаются в центр управления движением, где в модуле обработки данных осуществляется их группировка с разбиением по номеру маршрута i, и направлению движения по маршруту (2). Далее в модуле обработки данных осуществляется вычисление медианной скорости движения рельсового транспортного средства в каждый момент времени t (3). После чего в модуле обработки данных формируется электронная карта маршрута, на которой при помощи данных полученных от геоинформационной карты местности, осуществляется выделение участков пересечения рельсовых транспортных средств с объектами инфраструктуры, при проезде которых скорость движения должна быть ограничена (4), расчет скорости движения (5) по этим участкам осуществляется с учетом типа рельсового транспортного средства и устанавливается по умолчанию, расчет скорости (5) для остальных участков маршрута осуществляется на основе результатов вычисления медианной скорости. Полученные при расчетах (5) данные формируют оптимальный профиль движения рельсового транспортного средства, который сохраняется в составе электронной карты маршрута.
Реализация описанного способа позволяет осуществить сбор и обработку данных, необходимых для расчета оптимальных скоростей движения для рельсового транспортного средства, полученные при расчете данные могут быть использованы для выдачи рекомендаций экипажу, в качестве рекомендуемой скорости движения, а также для использования в системе автоматического управления движением, что в конечном итоге позволяет расширить функциональные возможности и повысить безопасность движения рельсовых транспортных средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2377658C1 |
| СПОСОБ ФОРМИРОВАНИЯ РЕКОМЕНДУЕМЫХ МАРШРУТОВ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ (ВАРИАНТЫ) | 2011 |
|
RU2459259C1 |
| СИСТЕМА КОНТРОЛЯ СОБЛЮДЕНИЯ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ | 2007 |
|
RU2384887C2 |
| СПОСОБ ФОРМИРОВАНИЯ МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА ДОРОЖНОЙ СЕТИ | 2014 |
|
RU2551294C1 |
| СПОСОБ СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ О ТРАНСПОРТНЫХ ПОТОКАХ НА АВТОДОРОГАХ С ИСПОЛЬЗОВАНИЕМ БЕСПРОВОДНЫХ СЕТЕЙ ПЕРЕДАЧИ ДАННЫХ | 2010 |
|
RU2442963C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В УСЛОВИЯХ НАСЕЛЕННОГО ПУНКТА | 2004 |
|
RU2266571C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2444794C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В УСЛОВИЯХ НАСЕЛЕННОГО ПУНКТА | 1999 |
|
RU2153194C1 |
| СПОСОБ КООРДИНАЦИИ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ И КОМПЛЕКСНОГО КОНТРОЛЯ ЗА БЕЗОПАСНОСТЬЮ ДОРОЖНОГО ДВИЖЕНИЯ | 2010 |
|
RU2457544C2 |
| Система для выявления нарушений правил дорожного движения | 2021 |
|
RU2778165C1 |
Изобретение относится к методам расчёта профилей скорости для городского рельсового транспорта. В способе на первом этапе происходит сбор GPS информации при помощи блока сбора и обработки информации, установленного на транспортное средство, в память которого сохраняется информация о скорости движения транспортного средства и его координатах в каждый момент времени, а также номере маршрута движения, на втором этапе в модуле обработки данных осуществляется группировка собранной информации по маршрутам и направлению, на третьем этапе на основе собранных данных в модуле обработки данных осуществляется расчет медианного значения скорости для каждой группы маршрутов в каждый момент времени. При этом на четвертом этапе на основе расчетов и данных геоинформационной карты в модуле обработки данных формируется электронная карта маршрута, содержащая результаты расчета медианной скорости движения с привязкой к координатам, и список выделенных участков, которые в свою очередь содержат объекты инфраструктуры, скорость проезда среди которых должна ограничиваться в соответствии с регламентами движения, расчет скорости движения по выделенным участкам осуществляется в соответствии с типом транспортного средства, а также с учетом радиусов кривизны железнодорожного полотна на выделенных участках с поворотами. Достигается повышение безопасности движения рельсовых транспортных средств. 1 ил.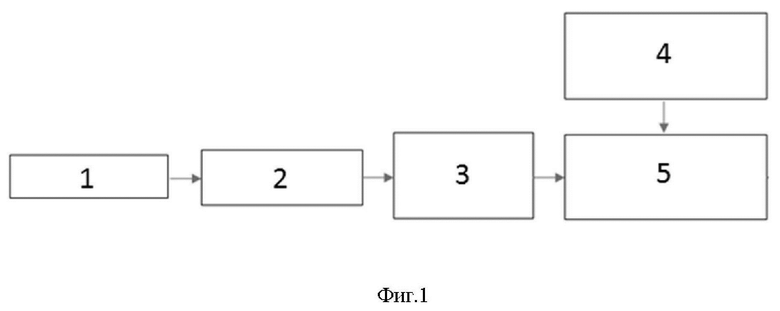
Способ агрегации множественных проездов по маршруту для расчёта оптимальных профилей скорости для городского рельсового транспорта, характеризующийся тем, что на первом этапе происходит сбор GPS информации при помощи блока сбора информации, установленного на транспортное средство, в памяти которого сохраняется информация о скорости движения транспортного средства и его координатах в каждый момент времени, а также номере маршрута движения, на втором этапе в модуле обработки данных осуществляется группировка собранной информации по маршрутам и направлению, на третьем этапе на основе собранных данных в модуле обработки данных осуществляется расчет медианного значения скорости для каждой группы маршрутов в каждый момент времени, на четвертом этапе на основе расчетов и данных геоинформационной карты формируется электронная карта маршрута, содержащая результаты расчета медианной скорости движения с привязкой к координатам, и список выделенных участков, которые в свою очередь содержат объекты инфраструктуры, при этом расчет скорости движения по выделенным участкам осуществляется в соответствии с типом транспортного средства, а также с учетом радиусов кривизны железнодорожного полотна на выделенных участках с поворотами.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Ahmed Amrani, Amira Ben Hamida, Tao Liu, Olivier Langlois | |||
| Train speed profiles optimization using a genetic algorithm based on a random-forest model to estimate energy consumption | |||
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Сплав на основе свинца | 1990 |
|
SU1767006A1 |
| Jorgen Thorlund Haahr, David Pisinger, Mohammad | |||
