Область техники, к которой относится изобретение
Настоящее изобретение относится к области контроля управления транспортным средством, и, более конкретно, к устройству, системе и способу для проведения экзамена на право управления транспортными средствами.
Уровень техники
В последние годы информационные технологии, проникая во множество отраслей, способствуют стремительному развитию техники и технологий, повышению качества и удобства существующих услуг и появлению множества новых услуг. Одной из таких отраслей является транспорт, в который активно внедряются беспилотные системы. Тем не менее, наиболее продвинутые решения на данный момент имеют лишь 4-й уровень автономности, и используются они лишь в нескольких городах в мире. Планы разработать полностью беспилотный автомобиль 5-го уровня автономности, заявляемые многими производителями, относятся самое ранее к 2026 году. Соответственно, с учетом времени, необходимого на отработку, внедрение и массовое распространение таких технологий, можно ожидать, что эра полностью беспилотного транспорта наступит не ранее, чем через 10 лет.
Таким образом, по-прежнему существует необходимость в подготовке водителей, а значит, и в проведении экзаменов на право управления транспортными средствами. Здесь стоит отметить, что несмотря на всевозможные достижения информационных технологий, автоматизация процесса проведения таких экзаменов либо совсем отсутствует, либо является крайне низкой, и оценка готовности кандидата в водители выполняется инспектором субъективно.
Хотя изучение ситуации показывает, что в мире производятся попытки разработать системы помощи инспектору во время проведения экзамена или же стремящиеся к полной автоматизации системы проведения экзамена, примеры успешной массовой практической эксплуатации таких систем отсутствуют. Причины этого заключаются в том, что предлагаемые решения либо являются компактными, но обрабатывают мало событий и ошибок, что всё равно приводит к необходимости активного участия инспектора в процессе проведения экзамена и в принятии решений по наличию или отсутствию ошибок, тем самым практически сводя на нет целесообразность применения подобной системы, либо (например, системы с мощными промышленными бортовыми компьютерами, взятые напрямую из беспилотных автомобилей) являются излишне сложными, объемными и дорогими как с точки зрения готового продукта, так и с точки зрения монтажа и обслуживания, что сказывается на рентабельности системы и готовности профильных ведомств к ее внедрению.
Между тем, проведенный авторами настоящего изобретения анализ процедур приема практического экзамена на право управления транспортными средствами показывает, что эти процедуры возможно автоматизировать почти полностью. Например, в России текущая процедура приема экзамена регулируется Административным регламентом МВД РФ по предоставлению государственной услуги по проведению экзаменов на право управления транспортными средствами и выдаче водительских удостоверений. Согласно регламенту, инспектор находится справа от водителя, даёт задание по маршруту следования, ведет протокол ошибок и контролирует безопасность маневров, при этом выполняя проверку 19 навыков управления транспортным средством и контроль 37 ошибок (из них 34 – для категории B). Большинство из проверяемых ошибок (в том числе критичные и важные при оценке готовности участия кандидата к участию в дорожном движении) являются полностью или частично формализуемыми, то есть могут быть автоматизированы. Часть остальных операций, таких как выдача задания по маршруту следования и ведение протокола ошибок, тоже могут быть автоматизированы. Кроме того, согласно регламенту, требуется аудио и видеофиксация процесса сдачи со сроком хранения не менее 1 месяца, что так или иначе ведет к необходимости использования инспектором соответствующих технических средств. Развитие применяемых в транспортном средстве технических средств до максимально возможной автоматизации процесса без существенных дополнительных затрат позволило бы снизить нагрузку на инспекторов и повысить прозрачность и объективность выставления оценки и принятия решения о результате экзамена (сдан / не сдан).
Обращаясь конкретно к известным из уровня техники техническим решениям, можно отметить, например, документ RU 2580091 C1, который раскрывает автоматизированную систему контроля и оценки выполнения контрольных упражнений практического экзамена на получение права управления транспортными средствами различных категорий. Данное техническое решение является попыткой предоставить полностью автоматизированную систему проведения экзамена, когда кандидат в водители находится в салоне автомобиля один, данные с расположенных в автомобиле датчиков и изображение внутри салона отправляются на удаленный контрольно-диспетчерский пункт, который автоматически контролирует ход экзамена и обнаруживает возможные ошибки, и диспетчер может в режиме реального времени посмотреть на карте положение и вектор движения транспортного средства и при необходимости дистанционно заглушить двигатель. Однако, как уже указывалось выше, текущий уровень автономности беспилотных систем, а равным образом и систем контроля вождения, таков, что пока не представляется возможным корректно, с учетом всех возможных ошибок и обстоятельств и в режиме реального времени полностью автоматически оценивать правильность действий кандидата в водители, движущегося на экзаменационном автомобиле в обычном транспортном потоке. Поэтому абсолютно закономерно, что предложенная в этом документе система предполагает использование специализированной площадки, которая представляет собой лишь имитацию городской улично-дорожной сети с асфальтобетонным покрытием и зонами контрольных упражнений, расположенными таким образом, чтобы обеспечить их последовательное выполнение. Кроме того, поток данных, передаваемый с датчиков и внутрисалонной камеры на удаленный контрольно-диспетчерский пункт, в условиях движения в реальном транспортном потоке является нестабильным и прерывистым, что приводит к невозможности непрерывного удаленного контроля, а значит, и к невозможности проведения экзамена и получения оценки в режиме реального времени.
Из уровня техники известно также техническое решение, описанное в документе WO 2021/045445 A1, в котором раскрывается бортовое устройство для проведения испытания по вождению, которое сначала на основании местоположения и ориентации автомобиля определяет, в каком режиме испытания и в какой зоне оно находится, а затем в зависимости от определенного режима и зоны оценивает и комментирует действия кандидата в водители. При этом данное устройство самостоятельно определяет возможные нарушения, допускаемые кандидатом в ходе испытания, лишь тогда, когда автомобиль находится на специальной испытательной площадке и необходимо оценивать правильность выполнения предварительно заданных упражнений в предварительно заданных зонах этой площадки, тогда как при переходе в режим движения по дороге оно лишь выдает сведения об окружающей дорожной обстановке (а именно, о погоде, пробках и сигналах светофора), соответствующие рекомендации о том, как себя лучше вести в такой обстановке, статистические сообщения о манере вождения (а именно, о средней скорости, количестве ускорений и торможений, количестве и угле поворотов руля) и соответствующие рекомендации о том, как улучшить эту статистику, чтобы повысить вероятность успешной сдачи экзамена. Соответственно, это решение не может использоваться в целях автоматизации хода проведения экзамена на дороге, а направлено в первую очередь на предварительное обучение кандидата в автошколе.
Таким образом, в уровне техники сформировалась потребность в создании компактного и недорогого бортового устройства, которое обеспечивало бы максимально возможную автоматизацию процесса проведения экзамена на право управления транспортными средствами и которое было бы простым и недорогим в монтаже и обслуживании, с тем чтобы обеспечить возможность его массового практического использования.
Сущность изобретения
С целью устранения по меньшей мере некоторых из вышеупомянутых недостатков предшествующего уровня техники настоящее изобретение направлено на создание устройств, систем и способов для проведения экзамена на право управления транспортными средствами.
Согласно первому аспекту настоящего изобретения, предложено устройство для проведения экзамена на право управления транспортными средствами, содержащее:
первый модуль обработки, выполненный с возможностью обеспечения функционирования операционной системы и других модулей устройства посредством предоставления им ресурсов вычислений и/или обработки;
первый модуль памяти, выполненный с возможностью временного хранения данных, необходимых модулям устройства в процессе выполнения текущих задач;
модуль проводной связи, выполненный с возможностью осуществления проводной связи с периферийными компонентами устройства, причем периферийные компоненты устройства содержат по меньшей мере одну камеру;
второй модуль памяти, выполненный с возможностью постоянного хранения программ и данных устройства, в том числе карты местности, маршрута проведения экзамена и видеозаписи с по меньшей мере одной камеры;
модуль навигации, выполненный с возможностью определения местоположения данного устройства на карте местности на основе принимаемых навигационных данных;
второй модуль обработки, выполненный с возможностью обеспечения обмена данными между первым модулем обработки и первым модулем памяти с одной стороны и модулем навигации и модулем проводной связи с другой стороны; и
модуль ускорения нейронных сетей, содержащий аппаратный ускоритель нейронных сетей, выполненный с возможностью выполнения задач обработки, которые необходимо выполнять с использованием нейронных сетей.
В одном из вариантов осуществления первый модуль обработки выполнен с возможностью определения приближения устройства к инициирующей точке или участку на маршруте и запуска модуля ускорения нейронных сетей для обработки события, соответствующего данной точке или участку, с использованием предварительно обученной нейронной сети.
В одном из вариантов осуществления первый модуль обработки выполнен с возможностью поиска объекта, соответствующего упомянутому событию, на изображении с камеры с помощью метода компьютерного зрения, не использующего нейросети, обрезки изображения до области интереса, содержащей только найденный объект, и подачи изображения области интереса на вход модуля ускорения нейронных сетей.
В одном из вариантов осуществления работа модуля ускорения нейронных сетей имеет высокий приоритет.
В одном из вариантов осуществления работа модуля навигации и модуля проводной связи имеет более высокий приоритет, чем работа модуля ускорения нейронных сетей.
В одном из вариантов осуществления устройство дополнительно содержит модуль беспроводной связи, соединенный с первым модулем обработки и выполненный с возможностью передачи на удаленный сервер видеозаписи, сохраненной во втором модуле памяти,
при этом второй модуль памяти выполнен с возможностью удаления фрагментов видеозаписи, успешно переданных на удаленный сервер.
В одном из вариантов осуществления передача на удаленный сервер видеозаписи, сохраненной во втором модуле памяти, с помощью модуля беспроводной связи продолжается во время работы модуля ускорения нейронных сетей с максимально доступной скоростью передачи.
В одном из вариантов осуществления первый модуль обработки выполнен с возможностью оценки правильности выполнения заданий на основе обработки данных, принимаемых устройством от периферийных модулей и от модуля навигации.
Согласно второму аспекту настоящего изобретения, предложен способ проведения экзамена на право управления транспортными средствами, выполняемый в устройстве для проведения экзамена на право управления транспортными средствами, содержащий этапы, на которых:
принимают с помощью модуля проводной связи сигналы и/или данные с периферийных компонентов устройства, причем периферийные компоненты устройства содержат по меньшей мере одну камеру;
сохраняют в постоянной памяти устройства программы и данные устройства, в том числе карту местности, маршрут проведения экзамена и видеозапись с по меньшей мере одной камеры;
определяют с помощью модуля навигации местоположение данного устройства на карте местности на основе принимаемых навигационных данных;
определяют с помощью первого модуля обработки приближение устройства к инициирующей точке или участку на маршруте;
запускают модуль ускорения нейронных сетей для обработки события, соответствующего данной точке или участку, с использованием предварительно обученной нейронной сети.
Технический результат
Настоящее изобретение позволяет повысить эффективность устройств, систем и способов для контроля управления транспортным средством. При этом обеспечивается:
- полный контроль управления транспортным средством в рамках предварительно заданного перечня упражнений, маневров и проверок;
- повышение надежности и безопасности как самого устройства, так и процесса проведения экзамена;
- упрощение обработки данных, снижение требований к производительности устройства;
- уменьшение затрат ресурсов и энергопотребления;
- уменьшение размеров устройства при поддержании необходимого уровня функциональности;
- упрощение технической поддержки устройства;
- уменьшение человеческого фактора;
- повышение прозрачности экзамена, выставления оценки и уровня доверия к экзамену и к экзаменатору;
- упрощение процедуры проведения экзамена с позиции экзаменатора;
- подтверждение действий и решений экзаменатора.
Следует понимать, что не каждый из вариантов осуществления может обеспечивать одновременно все указанные преимущества по сравнению со всеми известными решениями из уровня техники. Соответственно, некоторые варианты осуществления могут обладать лишь некоторыми из указанных преимуществ или иными преимуществами относительно некоторых известных решений.
Эти и другие преимущества настоящего изобретения станут понятны при прочтении нижеследующего подробного описания со ссылкой на сопроводительные чертежи.
Краткое описание чертежей
На Фиг. 1 показана блок-схема устройства для контроля управления транспортным средством согласно настоящему изобретению
Следует понимать, что фигура представлена схематично и не в масштабе и предназначена, главным образом, для улучшения понимания настоящего изобретения.
Подробное описание
Общий обзор системы
Дальнейшее описание в целом описывает процедуру проведения экзамена на право управления транспортными средствами, однако следует понимать, что принципы настоящего изобретения применимы также и к процедурам проведения испытания навыков вождения водителя или кандидата в водители не в рамках экзамена, проводящегося от имени и под контролем официальных органов и ведомств. Например, устройство, система и способы, описанные в настоящем изобретении, могут использоваться в автошколах в процессе обучения вождению или для проведения промежуточных или финальных контрольных испытаний кандидата в водители.
Соответственно, хотя далее в описании в качестве контролирующего лица упоминается инспектор, возможны также варианты осуществления, в которых таковым является инструктор автошколы.
Более того, некоторые принципы настоящего изобретения могут использоваться для контроля навыков вождения без участия контролирующего лица. Например, предложенное устройство может устанавливаться в личный автомобиль лицом или по заказу лица, желающего повысить свои навыки. В одном из вариантов осуществления наличие предложенного устройства может быть обязательным для транспортного средства, право управления которым имеет лицо, имеющее стаж вождения меньше порогового. Например, если в страховой полис на автомобиль вписано лицо со стажем вождения менее 1 года, то на такой автомобиль может накладываться обязательство по установке предложенного устройства. В другом варианте осуществления наличие предложенного устройства в автомобиле может служить основанием для применения скидки на страховой полис. Кроме того, предложенное устройство может устанавливаться в транспортное средство, сдаваемое в аренду или лизинг, в такси, в каршеринг. Также предложенное устройство может устанавливаться в служебные транспортные средства для контроля их использования.
Далее в настоящем документе кандидат в водители может для упрощения описания называться водителем, поскольку фактически на момент экзамена или испытания он находится за рулем и управляет транспортным средством. Кроме того, за рулем может оказаться иное лицо, не являющееся непосредственно тем кандидатом в водители, который в данный момент должен проходить испытание или экзамен, и именно это лицо будет являться фактически водителем.
В качестве транспортного средства может рассматриваться легковой автомобиль, грузовой автомобиль, автобус, троллейбус или иное транспортное средство, на котором может устанавливаться и использоваться предложенное устройство для контроля управления транспортным средством.
Транспортное средство, в котором установлено устройство согласно настоящему изобретению, далее в настоящем документе может называться несущим транспортным средством для удобства описания и для различения его от других транспортных средств, которые могут упоминаться в настоящем документе.
Далее в настоящем документе упоминается планшет инспектора, однако следует понимать, что в общем случае подразумевается электронное устройство пользователя, содержащее экран и средства ввода данных и управления устройством. Соответственно, устройством пользователя может быть смартфон, планшет, ноутбук, специально спроектированное для данных целей электронное устройство или иное подходящее устройство.
Система для контроля управления транспортным средством согласно настоящему изобретению содержит несущее транспортное средство, компактное устройство для контроля управления транспортным средством, установленное в несущем транспортном средстве, множество периферийных устройств, установленных в несущем транспортном средстве или на несущем транспортном средстве и обменивающихся сигналами и/или данными с устройством для контроля управления транспортным средством, а также удаленный сервер, который хранит актуальные карты и маршруты, а также при необходимости протокол проведения каждого экзамена, аудио и видеозаписи и программное обеспечение для обновления. Система также может содержать устройство контролирующего лица – например, планшет инспектора.
Кандидат в водители садится в транспортное средство, камера внутреннего обзора идентифицирует его, и устройство или система дает доступ к экзамену. Инспектор сидит рядом, запускает ход экзамена у себя в приложении на планшете и дает команду водителю начинать движение. Во время движения производится аудио и видеозапись, а также контролируется весь процесс проведения экзамена. При возникновении формализованных ошибок вождения они фиксируются в протоколе автоматически устройством, неформализованные ошибки помечаются в планшете инспектором. Необходимые данные непосредственно в ходе проведения экзамена отправляются на удаленный сервер. После окончания экзамена протокол подписывается кандидатом и инспектором и отправляется на удаленный сервер.
Таким образом, предоставляется система, которая обеспечивает полный контроль управления транспортным средством в рамках проведения экзамена с повышенной безопасностью, надежностью и пониженными затратами, при этом уменьшается человеческий фактор, повышается прозрачность экзамена и выставления оценки и повышается уровень доверия к экзамену и к экзаменатору. Для самого экзаменатора упрощается процедура проведения экзамена, так как ему требуется совершать меньше действий, а большинство из его действий и решений подтверждаются (поддерживаются) предложенным устройством и системой.
Структура устройства
Далее со ссылкой на Фиг. 1 будет более подробно описано устройство 100 для контроля управления транспортным средством согласно настоящему изобретению. Частным случаем устройства 100 является устройство для проведения экзамена на право управления транспортными средствами.
Устройство 100 содержит центральный модуль 1 обработки, модуль 2 ускорения нейронных сетей, периферийный модуль 3 обработки, модуль 4 навигации, модуль 5 проводной связи, модуль 6 беспроводной связи, модуль 7 кибербезопасности, модуль 8 беспроводного обновления, модуль 9 оперативной памяти, модуль 10 постоянной памяти, модуль 11 аварийного хранения данных, модуль 12 питания и модуль 13 диагностики и защиты от внешнего вмешательства.
В зависимости от конкретного применения некоторые из этих модулей могут отсутствовать, как будет более подробно пояснено позднее в данном документе. Стрелки между модулями на Фиг. 1 показывают их функциональные связи. Следует понимать, что показанные взаимосвязи являются лишь иллюстративными, и при необходимости некоторые из этих взаимосвязей могут отсутствовать, а также могут быть добавлены иные взаимосвязи. На Фиг. 1 не отражены функциональные связи модуля 12 питания и модуля 13 диагностики и защиты от внешнего вмешательства, поскольку в предпочтительном варианте они так или иначе связаны со всеми остальными модулями.
Центральный модуль 1 обработки (далее также может называться первым модулем обработки) является главным вычислительным модулем с точки зрения организации работы всего устройства и обслуживает потребности операционной системы и при необходимости других модулей и/или приложений, предоставляя им ресурсы вычислений и/или обработки. Физическая реализация центрального модуля обработки представляет собой центральный одноядерный или многоядерный процессор (CPU), кристалл, систему на кристалле (SoC), микросхему и т.п. Центральный модуль 1 обработки соединен с модулем 2 ускорения нейронных сетей, периферийным модулем 3 обработки, модулем 6 беспроводной связи, модулем 7 кибербезопасности, модулем 8 беспроводного обновления, модулем 9 оперативной памяти, модулем 10 постоянной памяти и модулем 11 аварийного хранения данных. Также при необходимости, если это позволяют сделать условия и требования конкретного применения, центральный модуль 1 обработки может быть соединен с модулем 4 навигации и модулем 5 проводной связи (не показано на Фиг. 1). Под соединением в данном случае понимается наличие дорожек, проводников и иных физических соединений, которыми один модуль прямо или через промежуточные (вспомогательные, согласующие, преобразующие) элементы соединен с другим модулем.
Модуль 2 ускорения нейронных сетей представляет собой аппаратный ускоритель нейронных сетей. Во время проведения экзамена или в режиме контроля управления транспортным средством модуль 2 ускорения нейронных сетей выполняет задачи обработки, которые необходимо выполнять с использованием методов искусственного интеллекта – в частности, с использованием нейросетей. Это существенным образом снижает нагрузку на центральный модуль 1 обработки. Более подробно структура и работа модуля 2 ускорения нейронных сетей раскрывается далее в соответствующем разделе подробного описания. Модуль 2 ускорения нейронных сетей соединен с центральным модулем 1 обработки, а также при необходимости может быть соединен с периферийным модулем 3 обработки, модулем 5 проводной связи, модулем 9 оперативной памяти, модулем 10 постоянной памяти.
Периферийный модуль 3 обработки (далее также может называться вторым модулем обработки) служит для организации обмена данными между центральным модулем 1 обработки и модулем 9 оперативной памяти с одной стороны и модулем 4 навигации и модулем 5 проводной связи с другой стороны. Центральный модуль 1 обработки и периферийный модуль 3 обработки могут быть как отдельными устройствами, так и могут быть размещены в одном кристалле/микросхеме, но в любом случае они физически отделены друг от друга. Периферийный модуль 3 обработки может быть реализован в виде отдельного процессора, сопроцессора, контроллера, микросхемы, схемы на общей печатной плате с остальными модулями устройства 100, схемы на базе собственной печатной платы, кристалла, системы на кристалле (SoC), в виде иного подходящего устройства или любой комбинации означенного. Периферийный модуль 3 обработки соединен с центральным модулем 1 обработки, модулем 4 навигации, модулем 5 проводной связи, модулем 9 оперативной памяти и модулем 11 аварийного хранения данных.
Модуль 4 навигации служит для определения местоположения данного устройства и несущего транспортного средства на основе принимаемых навигационных данных. Модуль 4 навигации соединен с периферийным модулем 3 обработки. Более подробно структура и работа модуля 4 навигации раскрывается далее в соответствующем разделе подробного описания.
Модуль 5 проводной связи предназначен для осуществления проводной связи с периферией: камерами, радарами, датчиками и т.д. Примеры используемых технологий и методов проводной связи включают в себя CAN, Ethernet, оптоволокно, витую пару, асинхронный интерфейс, Modbus и т.д. Аппаратная реализация модуля 5 проводной связи содержит одну или более отдельных микросхем, сетевых плат, контроллеров и т.д. Модуль 5 проводной связи соединен с периферийным модулем 3 обработки.
Модуль 6 беспроводной связи предназначен для осуществления беспроводной связи с внешними устройствами – в частности, с удаленным сервером, с планшетом инспектора, с беспроводными периферийными компонентами. Кроме того, модуль 6 беспроводной связи может принимать поправки от систем дифференциальной коррекции. Модуль 6 беспроводной связи может содержать модуль мобильной связи на основе одной или более технологий радиодоступа, таких как 2G, 3G, 4G, 5G, 6G и т.п., и/или модуль беспроводной локальной сети на основе одной или более технологий, таких как WiFi, WiMax, Bluetooth, UWB, ZigBee, инфракрасный порт и т.д. Модуль 6 беспроводной связи соединен с центральным модулем 1 обработки. Устройству 100 крайне необходимо наличие технологий высокоскоростной передачи данных, чтобы в его памяти не скапливались большие объемы видеозаписей и других данных об экзамене. При этом при движении по дороге покрытие как мобильной связью, так и беспроводными локальными сетями является нестабильным и разнообразным, поэтому возможность передавать данные и по менее скоростным технологиям передачи данных также позволяет увеличить вероятность успешной передачи данных в любой отдельно взятый момент времени в любой отдельно взятой точке маршрута. Также большое значение имеет способность быстро и с минимальными потерями данных переключаться от одной сети передачи данных к другой сети передачи данных, в том числе между разными технологиями.
Модуль 7 кибербезопасности предназначен для защиты от взлома методами программирования извне (главным образом, через беспроводную связь). Модуль 7 кибербезопасности соединен с центральным модулем 1 обработки. Более подробно структура и работа модуля 7 кибербезопасности раскрывается далее в соответствующем разделе подробного описания.
Модуль 8 беспроводного обновления предназначен для обновления программного обеспечения и рабочих данных устройства беспроводным образом. Модуль 8 беспроводного обновления соединен с центральным модулем 1 обработки. Более подробно структура и работа модуля 8 беспроводного обновления раскрывается далее в соответствующем разделе подробного описания.
Модуль 9 оперативной памяти (далее также может называться первым модулем памяти) предназначен для временного хранения данных, необходимых устройству и его модулям в процессе выполнения текущих задач с возможностью быстрого доступа к ним – в первую очередь, центральному модулю 1 обработки и периферийному модулю 3 обработки, когда им не хватает их собственной кэш-памяти. Принципы работы и структура оперативной памяти известна специалистам в данной области техники и не является предметом настоящего изобретения, поэтому не раскрывается здесь более подробно. На Фиг. 1 показано, что модуль 9 оперативной памяти соединен с центральным модулем 1 обработки и периферийным модулем 3 обработки, однако он при необходимости может быть соединен и с другими модулями. Аппаратная реализация модуля 9 оперативной памяти может содержать память RAM, флэш и другие виды памяти, способные обеспечить высокую скорость обмена данными.
Модуль 10 постоянной памяти (далее также может называться вторым модулем памяти) необходим для постоянного хранения всех программ и данных, в том числе для хранения операционной системы, карт, маршрутов, протокола экзамена, видеозаписи и аудиозаписи. Физически модуль 10 постоянной памяти может быть воплощен в виде твердотельного накопителя, такого как SSD. Наиболее объемные данные – это видеозаписи с камер. Так как данных очень много, они должны по возможности быстро передаваться на удаленный сервер и удаляться из модуля 10 постоянной памяти, чтобы высвобождать пространство для новых и новых данных. Соответственно, на практике хранение большей части данных не является истинно долговременным. Размер модуля 10 постоянной памяти напрямую зависит от пиковых значений объема данных, которые необходимо сохранять, и от скорости, с которой условия и требования конкретного применения позволяют их передавать. Например, если по всему маршруту имеется стабильное высокоскоростное 5G или WiFi-покрытие, это позволяет быстро передавать данные и использовать менее емкий модуль 10 постоянной памяти.
Модуль 11 аварийного хранения данных предназначен для восстановления данных на случай возникновения сбоя питания или сбоя проведения экзамена. Модуль 11 аварийного хранения данных соединен с центральным модулем 1 обработки и периферийным модулем 3 обработки. Более подробно структура и работа модуля 11 аварийного хранения данных раскрывается далее в соответствующем разделе подробного описания.
Модуль 12 питания предназначен для обеспечения стабильного и непрерывного питания для остальных модулей устройства. Более подробно структура и работа модуля 12 питания раскрывается далее в соответствующем разделе подробного описания.
Модуль 13 диагностики и защиты от внешнего вмешательства предназначен для контроля попыток физического доступа к устройству. Более подробно структура и работа модуля 13 диагностики и защиты от внешнего вмешательства раскрывается далее в соответствующем разделе подробного описания.
Шина 1-3, соединяющая центральный модуль 1 обработки и периферийный модуль 3 обработки, является высокозагруженной, так как по ней передаются данные с модулей 4 и 5: спутниковой навигации, датчиков, камер и радаров.
Шина 1-10, соединяющая центральный модуль 1 обработки и модуль 10 постоянной памяти, также является высокозагруженной, так как по ней сохраняются на модуль 10 постоянной памяти данные, идущие по шине 1-3, а также передаются в направлении модуля 6 беспроводной связи на удаленный сервер / облако.
Шина 1-6, соединяющая центральный модуль 1 обработки и модуль 6 беспроводной связи, соответственно, также является высокозагруженной, особенно в моменты, когда имеется хороший канал беспроводной связи. Именно потому, что объем данных от модуля 10 постоянной памяти очень большой и нужна большая производительность, особенно в моменты, когда имеется хороший канал беспроводной связи, модуль 6 беспроводной связи соединен напрямую с центральным модулем 1 обработки, а не с периферийным модулем 3 обработки, что еще больше нагрузило бы шину 1-3.
Таким образом, настоящее изобретение предоставляет устройство для контроля управления транспортным средством, которое обеспечивает полный контроль управления транспортным средством в рамках предварительно заданного перечня упражнений, маневров и проверок с повышенной безопасностью, надежностью и пониженными затратами, при этом уменьшается человеческий фактор, повышается прозрачность экзамена и выставления оценки и повышается уровень доверия к экзамену и к экзаменатору. Для самого экзаменатора упрощается процедура проведения экзамена, так как ему требуется совершать меньше действий, а большинство из его действий и решений подтверждаются (поддерживаются) предложенным устройством и системой.
Модуль ускорения нейронных сетей
Как указывалось выше, модуль 2 ускорения нейронных сетей представляет собой аппаратный ускоритель нейронных сетей. А именно, он может быть реализован в виде отдельного нейропроцессора (NPU), сопроцессора, микросхемы, схемы на общей печатной плате с остальными модулями устройства 100, схемы на базе собственной печатной платы, кристалла, системы на кристалле (SoC), выделенной специализированной области в рамках архитектуры центрального модуля 1 обработки, в виде иного подходящего компактного устройства или любой комбинации означенного.
Во время проведения экзамена или в режиме контроля управления транспортным средством модуль 2 ускорения нейронных сетей, будучи устройством, оптимизированным для работы нейросетей, выполняет задачи обработки, которые необходимо выполнять с использованием методов искусственного интеллекта, то есть множество небольших вычислений, производимых в отношении признаков и весовых коэффициентов нейросетевой модели.
Сами нейросетевые модели в предпочтительном варианте осуществления хранятся в собственной памяти модуля 2 ускорения нейронных сетей (например, во флэш-памяти нейропроцессора) для ускорения доступа к ним, однако при необходимости могут храниться в модуле 10 постоянной памяти устройства. Нейронные сети, используемые в предложенном устройстве 100, являются предварительно обученными. Конкретные методы обучения нейронных сетей известны специалистам в данной области техники и не являются предметом настоящего изобретения, поэтому не раскрываются здесь подробно.
Наличие модуля 2 ускорения нейронных сетей в предложенном устройстве существенным образом снижает нагрузку на центральный модуль 1 обработки, который полностью или частично освобождается от ресурсоемких нейросетевых вычислений и может продолжать обработку множества остальных процессов.
В одном из вариантов осуществления такие задачи обработки, возложенные на модуль 2 ускорения нейронных сетей, сводятся к обработке видеопотока с целью выполнения некоторых видов проверок, таких как проезд светофора, проезд пешеходного перехода, проезд железнодорожного переезда и т.п. Также при необходимости может анализироваться аудиопоток, как будет упоминаться далее в настоящем документе. Тем не менее, следует понимать, что предложенное устройство 100 создано не для полностью автономного вождения, а для получения по возможности максимально компактного устройства, позволяющего контролировать предварительно заданный ограниченный перечень упражнений, заданий и маневров, поэтому в качестве модуля 2 ускорения нейронных сетей не предполагается использование промышленных компьютеров, которые обычно устанавливаются на беспилотные транспортные средства и обладают большой производительностью, но при этом занимают много места и потребляют много энергии. В одном из вариантов осуществления, габариты модуля 2 ускорения нейронных сетей не превышают 1-DIN. Возможности модуля 2 ускорения нейронных сетей ограничены и несопоставимы с производительностью промышленного компьютера, поэтому в настоящем изобретении не предусмотрен непрерывный анализ видеопотока.
Вместе с тем, учитывая, что типы проверок, выполняемых модулем 2 ускорения нейронных сетей, укладываются в небольшой предварительно заданный перечень задач, его возможности являются достаточными для работы в режиме, близком к режиму реального времени. В частности, если результат выполнения проверки выводится в течение нескольких секунд после фактического выполнения соответствующего упражнения, задания или маневра, такой результат можно считать относительно актуальным и приемлемым с точки зрения проведения экзамена. Например, если через 5 секунд после проезда пешеходного перехода модуль 2 ускорения нейронных сетей выдает сообщение, что водитель не пропустил пешехода, который находился на краю пешеходного перехода лицом к дороге, то такой результат, если это событие не было замечено водителем и/или инспектором сразу, по-прежнему не является утратившим свою актуальность, так как за это время экзамен ещё с большой долей вероятности не был завершен, транспортное средство не проехало после этого события большое расстояние, и водителю еще могли быть не выданы инспектором новые задания. Даже если это событие было замечено водителем и/или инспектором сразу, ожидание результата в течение интервала до 10-15 секунд не является критическим, поскольку является подтверждением увиденного. В качестве примера, иллюстрирующего эти утверждения, можно указать, что за 15 секунд транспортное средство на скорости 40 км/ч преодолеет лишь 170 м. При этом, согласно вышеупомянутому регламенту, на проведение практического экзамена на право управления транспортными средствами категорий «B», «C» и «D» и подкатегорий «C1» и «D1» отводится до 30 минут, а на определение и фиксацию результатов – до 10 минут после завершения экзамена.
Несмотря на свои небольшие габариты, модуль 2 ускорения нейронных сетей может потреблять много ресурсов (помимо питания, ему также могут требоваться ресурсы шин передачи данных и ресурсы памяти, а также при недостатке вычислительных мощностей вычислительные ресурсы центрального модуля 1 обработки). Соответственно, нецелесообразно поддерживать его постоянно включенным и желательно переводить его в промежутках между активной работой в режим ожидания, режим бездействия, режим idle или подобный режим, если таковой поддерживается конкретной выбранной моделью модуля 2 ускорения нейронных сетей. Запуск (подготовка к работе) модуля 2 ускорения нейронных сетей может требовать некоторого времени. В связи с этим в ходе проведения экзамена предлагается запускать модуль 2 ускорения нейронных сетей только перед теми моментами, в которые необходима его работа, и на период работы присваивать ему по возможности наибольший приоритет, чтобы он как можно быстрее отработал, так чтобы результат его работы был актуален, и его можно было выключить и вернуться к обычной работе других модулей. Для этого по ходу маршрута на карте помечаются предварительно заданные точки/участки, во время которых должен работать модуль 2 ускорения нейронных сетей – например, перекрестки со светофорами, пешеходные переходы, железнодорожные переезды и т.д. Во время движения модуль навигации определяет координаты транспортного средства, и при приближении к указанной точке/участку происходит запуск модуля 2 ускорения нейронных сетей, так чтобы он вовремя был готов к работе и выполнил свою часть работы. По окончании работы он вновь переводится в режим ожидания. Таким образом, обеспечивается повышение общей производительности устройства и снижение потребления ресурсов при поддержании всего необходимого функционала устройства. Кроме того, чем меньше ресурсов тратит устройство, тем меньше требуемый для его работы размер компонентов, то есть тем более компактным можно его сделать.
Чтобы снизить нагрузку на модуль 2 ускорения нейронных сетей и ускорить его работу, видеопоток перед подачей в модуль 2 ускорения нейронных сетей может предварительно обрабатываться. В частности, сначала на изображении может выполняться поиск требуемых объектов (например, светофора, пешехода, железнодорожного состава) с помощью не использующих нейросети методов компьютерного зрения, затем изображение может кадрироваться (обрезаться, crop) до области интереса, содержащей только найденный объект, и такое изображение области интереса может подаваться на вход модуля 2 ускорения нейронных сетей. Также при необходимости может выполняться приведение изображения области интереса к размеру (разрешению), необходимому для корректной работы модуля 2 ускорения нейронных сетей. В некоторых вариантах осуществления методы компьютерного зрения, не использующие нейросети, работают существенно быстрее нейросетевых методов, поэтому сочетание предварительного поиска области интереса без участия нейросетей и дальнейшего анализа только области интереса с использованием нейросетей может позволить дополнительно оптимизировать работу устройства, повысить его производительность и снизить потребление ресурсов.
Выше указывалось, что во время работы модуля 2 ускорения нейронных сетей ему отдается максимально возможный приоритет. Между тем, при проведении экзамена из-за необходимости ведения видеозаписи процесс сохранения видеозаписи в модуль 10 постоянной памяти может являться непрерывным и обязательным, и одним из самых ресурсоемких процессов является также отправка видеозаписи на удаленный сервер. Поскольку модуль 10 постоянной памяти и центральный модуль 1 обработки не сильно загружены задачами нейросетевой обработки во время работы модуля 2 ускорения нейронных сетей (в конкретном неограничивающем примере их загрузка подобными задачами составляет около 3-5%), они могут выполнять не только сохранение видеозаписи, но и по возможности ее отправку на удаленный сервер. Более того, беспроводное соединение с удаленным сервером во время движения по дороге может быть нестабильным, поэтому для снижения требуемого объема модуля 10 постоянной памяти необходимо максимально использовать любую возможность передачи данных, тогда как необоснованный пропуск такой возможности напрямую влияет как на габариты устройства, так и на его функциональность и на возможности проведения экзамена.
Кроме того, в одном из вариантов осуществления процессы навигации (или локализации, определения местоположения, а также при необходимости направления и времени) и сбора данных с транспортного средства (с периферии, с датчиков, с шины CAN и т.д.) могут быть наиболее критичными и важными во время экзамена, поэтому для повышения надежности и безопасности проведения экзамена приоритет по использованию ресурсов устройства у этих процессов может быть выше, чем у модуля 2 ускорения нейронных сетей.
Модуль навигации
Модуль навигации выполнен с возможностью определения местоположения данного транспортного средства на основе принимаемых навигационных данных. Кроме того, модуль навигации на основе принимаемых навигационных данных может определять направление движения транспортного средства (например, азимут) и синхронизировать время.
В одном из вариантов осуществления навигационными данными являются уже готовые данные о координатах транспортного средства, о времени и/или о направлении движения транспортного средства, принимаемые модулем навигации от внешних устройств. Например, такие данные могут приниматься от приемника глобальной навигационной спутниковой системы (GNSS), расположенного вне данного устройства. Приемник GNSS, в свою очередь, принимает сигналы спутниковой навигации от антенны GNSS, расположенной на транспортном средстве. Антенна GNSS располагается предпочтительно в зоне максимальной видимости спутников – например, на крыше транспортного средства или на ветровом стекле, под ним и т.д. В качестве GNSS может использоваться ГЛОНАСС, GPS, Beidou, Galileo, QZSS или любая другая глобальная навигационная спутниковая система или их комбинация. Такой вариант осуществления позволяет упростить устройство, сократить его габариты и при необходимости сэкономить место для других модулей в корпусе устройства или в слоте, отведенном в автомобиле под устройство.
В одном из вариантов осуществления модуль навигации может сам содержать приемник GNSS, выполненный с возможностью приема сигналов спутниковой навигации от антенны GNSS. Такой вариант позволяет изготавливать устройство, меньше зависящее от внешних компонентов, и наоборот, накладывающее меньше ограничений на характеристики внешних компонентов, пригодных к использованию, так как изготовитель самостоятельно отлаживает работу приемника GNSS и при необходимости обновляет соответствующее программное обеспечение, что позволяет также повысить надежность устройства.
В одном из вариантов осуществления может использоваться большее количество антенн и приемников GNSS – например, 2 антенны и 2 соответствующих приемника GNSS. Все или часть приемников GNSS могут быть встроенными в модуль навигации или внешними. Антенны при этом должны быть разнесены на некоторое расстояние друг от друга – например, на 0,5 м, 1 м, 2 м. В таком случае принимаемые антеннами сигналы GNSS будут несколько отличаться, что позволит различать координаты антенн. Зная точное положение каждой антенны относительно транспортного средства, можно с повышенной точностью определять направление движения и положение транспортного средства на дороге с учетом его габаритов и контролировать связанные с этим параметры и события. Например, за счет этого можно с приемлемой точностью отслеживать расположение колес экзаменационного транспортного средства внутри полосы движения без использования ресурсоемких вычислений на базе методов компьютерного зрения.
Модуль навигации может определять местоположение, направление и точное время дополнительно на основе поправок, принимаемых из систем дифференциальной коррекции, такой как технология Real Time Kinematic (кинематика реального времени) или подобные. Это позволяет достичь точности позиционирования 3-5 см и лучше при точности синхронизации 5 мс и лучше. Следует отметить, что прием поправок осуществляется при этом не через приемник GNSS, а через альтернативное средство связи – например, через модуль беспроводной связи (в частности, через модуль мобильной связи с помощью такой технологии радиодоступа, как 2G, 3G, 4G, 5G, 6G и т.п., или через модуль беспроводной локальной сети с помощью такой технологии, как WiFi, WiMax, Bluetooth, UWB, ZigBee, инфракрасный порт и т.д.).
Экзамен на право управления транспортными средствами является чрезвычайно ответственной процедурой, поэтому следует полностью избегать или хотя бы свести к минимуму любые возможные сбои в работе устройства. Одним из таких сбоев, непосредственно влияющих на процесс проведения экзамена, может быть сбой сигнала GNSS, который может возникнуть в результате потери сигнала GNSS из-за плохих условий видимости спутников или в результате спуфинга, то есть подмены истинного сигнала GNSS подложным сигналом с другими данными. Вследствие сбоя сигнала GNSS приемник GNSS может либо вообще перестать определять координаты, направление и время, либо может начать выдавать ошибочные показания. Из-за этого устройство может, например, вовремя не определить приближение к точке инициирования модуля ускорения нейронных сетей, и тот не сможет обработать соответствующее событие. Кроме того, может быть нарушено ведение журнала / лога / протокола экзамена. В связи с этим в модуле навигации может быть предусмотрена опция выполнения проверки истинности показаний приемника GNSS.
В случае если используется две или более разнесенных антенн, реальные сигналы GNSS на каждой антенне имеют небольшие отличия. Соответственно, если определено, что по меньшей мере с двух антенн или приемников GNSS (в зависимости от реализации) пришли идентичные данные, то это указывает на наличие спуфинг-атаки, и такие данные являются некорректными. Кроме того, если расхождения между данными с разных антенн или приемников GNSS являются слишком большими (превышают предварительно заданный порог) или с какой-либо антенны или приемника GNSS совсем не приходят сигналы или приходят нулевые сигналы, это может указывать на сбой сигнала GNSS или на поломку антенны или приемника GNSS.
Если устройство или транспортное средство содержит встроенные часы, то их показания могут приниматься и сравниваться с показаниями приемника(ов) GNSS. Наличие разницы в показаниях больше предварительно заданного порога указывает на сбой сигнала GNSS или на поломку антенны, приемника GNSS или самих часов. В таком случае необходимо сравнить показания часов с их предыдущими показаниями, а показания приемника GNSS - с его предыдущими показаниями. Если выявляется, что часы продолжают идти корректно (например, разница с их предыдущими показаниями больше 0 и попадает в предварительно заданный интервал, а разница показаний приемника GNSS не попадает), то именно их показания могут использоваться далее для проведения экзамена до тех пор, пока не возобновится корректная работа приемника GNSS. При необходимости встроенные часы могут время от времени (например, периодически или при наступлении каких-либо событий) синхронизироваться на основе корректных показаний приемника GNSS.
Если устройство или транспортное средство не содержит встроенные часы, или если встроенные часы не работают или работают некорректно, или если необходимы дополнительные проверочные данные о времени, то данные о времени могут также поступать в модуль навигации с планшета инспектора. Кроме того, с планшета инспектора в модуль навигации могут поступать данные о координатах и направлении, если планшет инспектора выполняет такие измерения.
Кроме того, если устройство или транспортное средство содержит датчик ускорения (например, акселерометр) и датчик угловой скорости (например, гироскоп), то их показания могут сравниваться с показаниями приемника(ов) GNSS. Например, если акселерометр и гироскоп явным образом указывают, что устройство (а значит, и транспортное средство, в которое встроено это устройство) движется, а приемник GNSS считает, что устройство стоит на месте, то показания приемника GNSS можно считать некорректными.
Более того, модуль навигации может содержать модуль инерциальной навигации, выполненный с возможностью определения местоположения и направления движения устройства на основе сигналов, принимаемых по меньшей мере от одного датчика ускорения и по меньшей мере от одного датчика угловой скорости. Модуль инерциальной навигации является автономным и не зависит от сигнала GNSS, поэтому с того момента, как определено, что сигнал GNSS является некорректным, для дальнейшей навигации могут использоваться показания модуля инерциальной навигации. Как и приемник GNSS, модуль инерциальной навигации может получать поправки с помощью технологий, отличных от спутниковой навигации – например, с помощью вышек сотовой связи, WiFi-точек, UWB-сетей и т.д. С того момента, как сигнал GNSS восстановится, модуль навигации вновь может вернуться к использованию показаний приемника GNSS. Модуль инерциальной навигации может служить не только заменой на случай сбоя сигнала GNSS, но и дополнением или уточнением для данных GNSS. В зависимости от требований и условий конкретного применения корректные показания приемника GNSS могут иметь больший вес, чем показания модуля инерциальной навигации. Как и в случае с приемником GNSS, модуль инерциальной навигации может располагаться в транспортном средстве вне устройства, и тогда модуль навигации принимает от модуля инерциальной навигации готовые навигационные данные.
Таким образом, обеспечивается возможность проведения корректной процедуры экзамена даже в случае сбоя сигнала GNSS, что повышает надежность устройства.
Периферия
Согласно регламенту проведения экзамена, может требоваться аудио и видеофиксация действий водителя (кандидата в водители) во время экзамена. Соответственно, в транспортном средстве может быть установлена по меньшей мере одна камера внутреннего обзора, направленная внутрь салона и захватывающая по меньшей мере область, в которой располагается водитель. Например, такая камера может быть установлена в верхней части салона перед водителем. Помимо фиксации действий водителя, данная камера может использоваться для идентификации водителя. Конкретные методы идентификации известны специалистам в данной области техники и не являются предметом настоящего изобретения, поэтому не описываются здесь подробно.
Дополнительно в транспортном средстве может быть установлена по меньшей мере одна камера внутреннего обзора, направленная внутрь салона и захватывающая по меньшей мере область, в которой располагается пассажир. В частности, такая камера может быть необходима для фиксации действий экзаменатора. В другом вариант осуществления такая камера может быть необходима, чтобы контролировать наличие или отсутствие иных лиц в транспортном средстве на заднем сиденье и для фиксации их действий.
Кроме того, в транспортном средстве может быть установлен набор камер внешнего обзора, содержащий по меньшей мере две камеры, направленные наружу салона и захватывающие по меньшей мере область окружающего пространства около транспортного средства – например, область перед транспортным средством, слева от транспортного средства, справа от транспортного средства, позади транспортного средства.
По меньшей мере часть из набора камер внешнего обзора может быть расположена таким образом, чтобы получать стереоизображение. Из стереоизображения может быть получено облако точек, могут находиться ключевые точки и т.д. Стереоизображение может обрабатываться устройством с целью поиска объектов и событий перед водителем, чтобы определять, как водитель реагирует на эти события или объекты, и/или чтобы инициировать выполнение предварительно заданных сценариев работы устройства. Для получения стереоизображения камеры должны располагаться таким образом, чтобы по меньшей мере часть их углов обзора пересекались между собой (накладывались). Соответственно, в области пересечения углов обзора возникает стереоизображение.
Конкретное расположение камер зависит от характеристик камер и от того, в пределах какой дальности и в каких углах обзора необходимо получать двухмерное или стереоизображение. Например, в одном из вариантов осуществления имеется 2 разнесенные друг от друга камеры, направленные в область перед транспортным средством, чтобы получать в этой области стереоизображение, а также 2 или 3 широкоугольных камеры, направленных в остальные стороны от транспортного средства (по бокам и назад) и предназначенных для получения плоского изображения.
В другом варианте осуществления имеется 2 или более камер, расположенных вблизи друг от друга – например, касающиеся друг друга или находящиеся на малом расстоянии. Для увеличения угла обзора камеры могут быть расположены под углом друг к другу. Близкое расположение камер упрощает их монтаж и прокладку кабелей. Также близко расположенные камеры могут быть прикреплены к единому жесткому крепежному средству (например, к основанию или кронштейну), что не только еще больше упрощает их монтаж в транспортном средстве, но и упрощает калибровку после монтажа. Кроме того, крепежное средство может быть выполнено в виде бленды, может содержать бленду или может быть выполнено с возможностью прикрепления бленды. Бленда может быть необходима для защиты от бликов и засветов. Может использоваться одна бленда для нескольких камер или же одна бленда для каждой камеры. Некоторые камеры могут не иметь бленду. В одном неограничивающем примере, в области салонного зеркала на едином кронштейне может быть установлен набор камер внешнего обзора, содержащий три камеры, направленные на область перед транспортным средством и имеющие единую бленду, и к этому же кронштейну может быть прикреплена камера внутреннего обзора, направленная на область расположения водителя и не имеющая бленды.
В одном из вариантов осуществления видеопоток, поступающий с каждой камеры, может непрерывно записываться в память устройства. В другом варианте осуществления ведется непрерывная запись видеопотока только с части камер – например, только с внутренней, тогда как видеопоток с остальных камер может вообще не записываться или записываться выборочно – например, периодически или в связи с наступлением предварительно заданных событий. Соответственно, некоторые камеры могут работать не постоянно, а только периодически или в связи с наступлением предварительно заданных событий. Например, если по местоположению транспортного средства на карте определено, что оно приблизилось к пешеходному переходу, может включиться набор камер внешнего обзора, чтобы проконтролировать и записать процесс пересечения пешеходного перехода. В другом примере, если сигнал по меньшей мере с одного из радаров указывает на опасную близость к внешнему объекту, может включаться одна или более из камер внешнего обзора, ответственная за контроль той области, в которой расположен этот радар, и может производиться запись с этой камеры.
Для фиксации звуковой обстановки внутри салона транспортного средства и/или около транспортного средства может использоваться по меньшей мере один микрофон внутри салона (внутренний микрофон) и/или по меньшей мере один микрофон снаружи салона (внешний микрофон). Микрофон может быть направленным или всенаправленным. Использование направленных микрофонов может позволить выделять аудиопотоки с разных направлений – например, аудиопоток из области расположения водителя и аудиопоток из области расположения пассажира. Для удобства монтажа микрофон может быть встроен в камеру. При этом часть камер может быть снабжена всенаправленным микрофоном, часть камер может быть снабжена направленным микрофоном, а часть камер может не иметь микрофона. Если камера и микрофон являются отдельными друг от друга элементами, они могут иметь единое крепежное средство для упрощения монтажа. Например, один всенаправленный внутренний микрофон может быть установлен на тот же единый кронштейн, к которому крепятся камера внутреннего обзора и камеры внешнего обзора.
В одном из вариантов осуществления аудиообстановка может анализироваться для выявления предварительно заданных событий – например, может определяться вероятность возникновения конфликта, звук ударов или разбития стекла и т.д. В другом варианте могут выявляться ключевые слова, произносимые водителем или пассажиром, или просто наличие речи.
Как и в случае с камерами, аудиоопоток, поступающий с каждого микрофона, может непрерывно записываться в память устройства. В другом варианте осуществления ведется непрерывная запись аудиопотока только с части микрофонов – например, только с внутреннего, тогда как аудиопоток с остальных микрофонов может вообще не записываться или записываться выборочно – например, периодически или в связи с наступлением предварительно заданных событий. Соответственно, некоторые микрофоны могут работать не постоянно, а только периодически или в связи с наступлением предварительно заданных событий. Например, запись внутреннего микрофона может включаться только в моменты, когда определено, что водитель или пассажир сказал ключевое слово «Запись» или какое-либо иное ключевое слово, инициирующее запись. В другом примере может вестись запись только тех промежутков, когда имеется речь внутри салона. В еще одном примере, если сигнал по меньшей мере с одного из радаров указывает на опасную близость к внешнему объекту, может включаться внешний всенаправленный микрофон или же направленный микрофон, ответственный за контроль той области, в которой расположен этот радар, и может производиться запись с этого микрофона.
Синхронизация аудиопотоков и видеопотоков может выполняться с помощью показаний точного времени, полученных от модуля навигации.
На транспортном средстве может быть установлен по меньшей мере один радар. Радары предназначены для измерения расстояния (дистанции) до объектов около транспортного средства. Диапазон дальности, в пределах которого должны работать радары, зависит от требований конкретного применения. В качестве неограничивающих примеров, радары могут служить для определения дистанции до других транспортных средств, расположенных или движущегося около данного транспортного средства, бокового интервала, расстояния до пешехода, животного или иных объектов, расположенных или движущихся на дороге / проезжей части или вблизи нее. В одном из вариантов осуществления для целей настоящего изобретения может быть достаточно наличия одного радара в передней части транспортного средства для контроля объектов перед транспортным средством и одного радара в задней части транспортного средства для контроля объектов позади транспортного средства.
На транспортном средстве может быть установлено множество датчиков, дающих сведения об остальных блоках/системах автомобиля и действиях водителя, которые можно непосредственно измерить или отследить без применения методов искусственного интеллекта – например, скорость движения, степень нажатия на педали (для этого педали могут иметь накладки с датчиком), пристегнут ли ремень безопасности, работает ли двигатель и т.д. Данные с датчиков поступают в устройство и обрабатываются соответствующими модулями для контроля управления транспортным средством и/или для обнаружения предварительно заданных событий. Например, если средняя скорость движения транспортного средства за предварительно заданный промежуток времени или мгновенная скорость движения транспортного средства превысила предварительно заданный разрешенный порог, то может определяться ошибка управления, указывающая на то, что водитель не владеет в достаточной степени навыком движения с максимальной разрешенной скоростью. Указание на ошибку может затем заноситься в протокол экзамена.
Если транспортное средство снабжено штатными периферийными блоками (камерами, микрофонами, радарами, датчиками), характеристики которых пригодны для использования с предложенным устройством для контроля управления транспортным средством, устройство может быть подключено к этим блокам и использовать их для осуществления своих функций. Например, если транспортное средство уже содержит микрофон внутри салона, он может быть подключен к устройству для контроля управления транспортным средством с целью фиксации аудиообстановки внутри салона. В другом неограничивающем примере, если транспортное средство уже содержит радары для системы помощи парковки, данные с этих радаров могут также использоваться устройством для контроля управления транспортным средством. Это позволяет упростить монтаж устройства и снизить затраты на организацию его работы.
Средства ввода-вывода и управление устройством
Предложенное устройство может содержать средства управления и ввода данных для облегчения взаимодействия с ним. Например, какие-либо кнопки, клавиши или иные средства управления и ввода могут быть установлены на корпусе устройства для управления питанием устройства, для управления его режимами и т.д. В другом варианте осуществления элементы управления и ввода могут быть выведены на приборную панель, на центральную консоль или в иные положения, из которых может быть удобно выполнять управление устройством и ввод данных. Еще в одном варианте осуществления элементы управления и ввода могут быть выведены на графический пользовательский интерфейс, с помощью которого взаимодействовать с устройством можно беспроводным образом.
В одном из вариантов осуществления устройство может содержать только одну физическую кнопку включения/выключения питания на корпусе и больше не содержать физических элементов управления и ввода ни на корпусе, ни в виде выносных элементов, и все остальное управление и ввод данных может выполняться через графический пользовательский интерфейс. Это уменьшает вероятность некорректного воздействия на устройство и на ход проведения экзамена, что повышает надежность и безопасность предложенного устройства и процедуры проведения экзамена.
Доступ к графическому пользовательскому интерфейсу может выполняться через планшет инспектора, через удаленный сервер, через аппаратуру технического специалиста и т.п. Набор функций и элементов управления устройством может отличаться у разных пользователей в зависимости от уровня их доступа и от способа подключения. Например, технический специалист, подключаясь к устройству через специализированный протокол связи, может иметь наивысший уровень доступа, и поэтому может управлять внутренними настройками устройства и его компонентов, тогда как инспектор может иметь меньше возможностей по управлению устройством. Это повышает надежность и безопасность предложенного устройства. Кроме того, часть настроек может быть недоступна в том или ином режиме устройства – например, в режиме проведения экзамена могут быть недоступны функции обновления. Это повышает надежность и безопасность предложенного устройства и процедуры проведения экзамена.
Ввод данных в устройство может быть необходим во время экзамена – например, инспектор через планшет инспектора может вводить текстовые, голосовые, фото- или видео-примечания касательно выполнения упражнений и заданий или касательно иных обстоятельств проведения экзамена, может отмечать ошибки или верно выполненные упражнения и задания, может при необходимости корректировать маршрут и т.д. Перед экзаменом инспектор может вводить в устройство свои данные, данные о предстоящем экзамене и данные о кандидате в водители. После экзамена инспектор может вводить в устройство данные о результатах экзамена. Следует отметить, что возможны также и другие причины для ввода данных в устройство, и хотя для упрощения описания они не указываются здесь более подробно, они должны попадать в рамки объема и принципов настоящего изобретения.
Предложенное устройство может также содержать средства вывода данных. Как и в случае со средствами ввода данных, они могут быть реализованы в виде элементов на корпусе (например, индикатор питания), выносных элементов (например, индикатор на приборной панели, дисплей на центральной консоли и т.п.). Еще в одном варианте осуществления элементы вывода могут быть выведены на графический пользовательский интерфейс для беспроводного взаимодействия пользователя с устройством. Например, инспектор на планшете инспектора через графический пользовательский интерфейс может просматривать текущие сведения о процессе прохождения экзамена, об оценке выполнения упражнений и заданий, о состоянии устройства и его периферийных компонентов, о карте, маршруте и текущем местоположении, о кандидате и т.д. Технический специалист через свою аппаратуру, подключившись к устройству напрямую или через удаленный сервер, может просматривать внутренние настройки модулей устройства и его периферийных компонентов.
Уровни доступа и список доступных для управления функций для разных пользователей могут задаваться пользователями, имеющими соответствующий уровень доступа. Информация о пользователях, их уровнях доступа и списке доступных им функций управления может храниться на удаленном сервере и/или в памяти устройства. Соответственно, во время авторизации пользователя устройство может сверяться с информацией из встроенной памяти и/или с информацией из удаленного сервера. Случай, когда для успешной авторизации требуется наличие соответствующего пользователя и в памяти устройства, и на удаленном сервере, является наиболее защищенным.
В одном из вариантов осуществления максимальный доступ к ручному управлению устройством могут иметь только пользователи из предварительно заданного списка пользователей, который сохранен в памяти устройства. Чем меньше пользователей имеют такой доступ, тем выше безопасность устройства.
Удаленный сервер
Удаленный сервер в зависимости от требований конкретного применения может быть как сосредоточенным (централизованным), так и распределенным, в том числе реализованным в облаке.
Удаленный сервер хранит протокол проведения каждого экзамена, требуемые аудио и видеозаписи (как указывалось выше, по регламенту может требоваться не вся непрерывная запись). Также он хранит актуальные маршруты, карты и программное обеспечение самого устройства и при необходимости периферийных блоков для обеспечения возможности установки и обновления программного обеспечения, в том числе для обновления «по воздуху» (OTA, over-the-air).
Удаленный сервер может хранить базу данных кандидатов, допущенных к экзамену. Инспектор может с помощью этой базы данных удостовериться в том, что кандидат, который сел в автомобиль, имеет право сдавать экзамен в этот день. Кроме того, идентификация водителя может выполняться с использованием камеры внутреннего обзора, направленной на водителя. Изображение с этой камеры отправляется на сервер, сервер по изображению распознает лицо водителя и сопоставляет его с базой данных кандидатов, допущенных к экзамену. Если сопоставление завершается успешно, соответствующее уведомление отправляется на устройство и/или на планшет инспектора, и экзамен может начаться. Если сопоставление завершается неудачно, соответствующее уведомление отправляется на устройство и/или на планшет инспектора, и могут выполняться действия, препятствующие проведению экзамена с посторонним лицом на месте водителя – например, может блокироваться ведение протокола экзамена или может физически блокироваться одно или более устройств в транспортном средстве, с помощью которых транспортное средство может начать и/или продолжать движение.
Модуль беспроводного обновления
Программное обеспечение (ПО) предложенного в настоящем изобретении устройства является сложным и нуждается в постоянном обновлении для обеспечения стабильной и надежной работы, для добавления функционала, для исправления ошибок, для снижения потребления ресурсов и т.д. Кроме того, достаточно часто могут меняться карты и маршруты проведения экзамена.
Между тем, поскольку предложенное устройство в некоторых вариантах осуществления может использоваться для проведения официальной процедуры экзамена на право управления транспортным средством, оно должно быть защищено от возможных мошеннических и прочих действий, направленных на фальсификацию результатов экзамена или на вмешательство в процесс его проведения. Соответственно, во избежание несанкционированного физического доступа злоумышленников к устройству оно может быть установлено в транспортном средстве таким образом, чтобы к нему не имелось беспрепятственного физического доступа. Также оно может не иметь внешних разъемов, через которые к нему можно было бы подключиться, поскольку это тоже является потенциальной угрозой безопасности (например, если обеспечить возможность подключения флеш-накопителя из салона автомобиля, это может быть источником угрозы – как намеренной, так и непреднамеренной, поскольку флеш-накопители часто бывают зараженными без ведома хозяина). Все это может требовать наличия технического специалиста, имеющего надлежащий уровень доступа к устройству, каждый раз, когда необходимо произвести обновление.
Однако, учитывая возможную частоту обновлений и возможные масштабы использования предложенного устройства, обновлять его вручную повсеместно и вовремя было бы затруднительно. Частое физическое вмешательство со стороны технического специалиста, в свою очередь, может приводить к снижению уровня защиты устройства, поскольку в определенный момент может проявиться человеческий фактор, и технический специалист может случайно или умышленно совершить действия, снижающие защиту – например, некорректно закрыть корпус. Также это может приводить к ускоренному износу корпуса устройства и крепежных средств, с помощью которых корпус устройства установлен в транспортном средстве.
Для решения этих проблем в предложенном устройстве может содержаться модуль беспроводного обновления, выполненный с возможностью обновления программного обеспечения и рабочих данных устройства беспроводным образом. Под программным обеспечением (ПО) здесь понимаются любые программные элементы и модули, которые могут быть необходимы устройству и его компонентам для работы – например, микропрограммные элементы для управления работой центрального модуля обработки, программные элементы операционной системы, элементы модуля кибербезопасности, модели искусственного интеллекта и т.д. Под рабочими данными здесь понимаются любые данные, которые могут быть необходимы устройству и его компонентам для работы – например, карты, маршруты, базы данных, наборы данных и т.д.
Беспроводное обновление может также называться обновлением по воздуху или OTA-обновлением (over-the-air). Для выполнения обновления модуль беспроводного обновления осуществляет связь (обменивается данными) с удаленным сервером.
Возможна как аппаратно-программная реализация модуля беспроводного обновления (например, в виде отдельной микросхемы или в виде физически выделенной области в кристалле или процессоре), так и чисто программная реализация, при которой программное обеспечение модуля беспроводного обновления для своей работы использует функции и ресурсы (вычислений, памяти, передачи данных) других аппаратных модулей. В общем случае, операции, выполняемые модулем беспроводного обновления, можно разделить на операции хранения, обработки и передачи данных.
Для выполнения операций хранения модуль беспроводного обновления может содержать собственную аппаратную память или пользоваться ресурсами модуля постоянной памяти и/или модуля оперативной памяти.
Для выполнения операций обработки модуль беспроводного обновления может содержать собственный аппаратный процессор или пользоваться ресурсами центрального модуля обработки и/или вспомогательного модуля обработки.
Для выполнения операций передачи данных модуль беспроводного обновления может содержать собственный аппаратный приемопередатчик или может осуществлять связь с удаленным сервером через модуль беспроводной связи (в частности, через модуль мобильной связи с помощью такой технологии радиодоступа, как 2G, 3G, 4G, 5G, 6G и т.п., или через модуль беспроводной локальной сети с помощью такой технологии, как WiFi, WiMax, Bluetooth, UWB, ZigBee, инфракрасный порт и т.д.).
Обновление выполняется вне процедуры проведения экзамена, так как, во-первых, она является очень ресурсозатратной, и нет возможности тратить дополнительные ресурсы на посторонние процессы, которые не входят в эту процедуру, и во-вторых, попытка обновления прямо во время экзамена может привести к перезагрузке или сбою каких-либо операций и модулей, из-за чего экзамен может оказаться несостоявшимся. Беспроводное соединение при движении по дороге может быть нестабильным и прерывистым, что может приводить к ошибкам скачивания с необходимостью повторного скачивания, поэтому предпочтительно выполнять обновление в условиях стабильного и качественного беспроводного соединения – например, когда транспортное средство стоит в гараже или на стоянке, где организована высокоскоростная Wi-Fi или 4G-сеть.
В одном варианте осуществления обновление может выполняться по запросу пользователя – например, ответственного сотрудника ведомства или организации, которая владеет транспортным средством. В другом варианте осуществления обновление может выполняться по команде технического специалиста, который выполняет техническую поддержку устройства. В целях безопасности могут устанавливаться ограничения на то, каким именно образом (по каким протоколам передачи данных) можно подключаться к интерфейсу управления устройством. Например, если обеспечить возможность управления устройством только через прямое Wi-Fi или Bluetooth-соединение, то это будет требовать физического присутствия человека, который намерен осуществлять управление, в непосредственной близости от устройства / транспортного средства, за счет чего можно избежать удаленного управления устройством через Интернет. Еще в одном варианте осуществления обновление может выполняться автоматически, то есть инициироваться самим устройством или удаленным сервером. При этом устройство может опрашивать сервер на предмет наличия обновлений или сервер сам может сообщать устройству о том, что для него имеются обновления. При необходимости параметры текущей конфигурации устройства (например, версии и настройки установленного на нем ПО и версии рабочих данных) могут сохраняться на удаленном сервере. В другом варианте осуществления вместо указания версии каждого приложения, элемента и модуля удаленный сервер может хранить идентификатор конфигурации устройства – например, хэш-код файла с описанием конфигурации.
Обновление может содержать множество различных файлов и/или инструкций (команд). Файлы и/или инструкции могут быть упакованы в пакеты или архивы. В частности, обновление может содержать управляющие инструкции и/или метаданные, необходимые для организации самой процедуры обновления, патчи, не требующие перезагрузки соответствующего компонента / модуля, файлы, требующие перезагрузки соответствующего компонента / модуля, глобальные обновления, требующие перезагрузки всего устройства, и т.д.
Для повышения безопасности обновление может содержать файлы и/или инструкции, предназначенные для проверки, установлены неизмененные лицензионные (или разрешенные к использованию) компоненты / модули / данные. Если обнаружено, что установлены измененные лицензионные компоненты / модули / данные или нелицензионные компоненты / модули / данные, это может указывать на то, что произведена попытка несанкционированного вмешательства в ПО устройства и/или файлы повреждены. В таком случае может выводиться соответствующее уведомление, и обновление может не устанавливаться. В другом варианте осуществления может быть произведена попытка замены измененных / нелицензионных / поврежденных файлов вместе с обновлением на корректные лицензионные.
Для повышения надежности обновление может содержать файлы и/или инструкции, предназначенные для проверки, подходит ли это обновление для данной модели устройства и текущей конфигурации ПО. Если обнаружено, что обновление полностью или частично не подходит, оно может либо полностью не устанавливаться, либо могут скачиваться и обновляться только те компоненты / модули / данные, которые подходят.
Для снижения нагрузки на удаленный сервер, на сети передачи данных и на само устройство, а также во избежание растраты сетевых ресурсов обновление может содержать файлы и/или инструкции, предназначенные для проверки, имеются ли уже на данном устройстве скачанные и/или установленные файлы, входящий в текущий пакет обновлений. Соответственно, файлы, которые уже имеются на данном устройстве, не скачиваются.
Для повышения надежности и для уменьшения ресурсов памяти, необходимых для функционирования устройства, обновление может содержать файлы и/или инструкции, предназначенные для проверки, какие файлы подлежат удалению во время или после обновления.
Модуль диагностики и защиты от внешнего вмешательства
Как указывалось выше, предложенное устройство может быть установлено в транспортном средстве таким образом, чтобы к нему не имелось беспрепятственного физического доступа. Тем не менее, даже скрытная или труднодоступная установка не может гарантировать того, что злоумышленники не будут совершать попытки осуществления несанкционированных действий в отношении устройства, его периферии или транспортного средства, в котором оно установлено (несущего транспортного средства). В связи с этим для повышения безопасности устройство может содержать модуль диагностики и защиты от внешнего вмешательства.
Модуль диагностики и защиты от внешнего вмешательства выполнен с возможностью диагностики по меньшей мере внутренних модулей устройства, а также при необходимости с возможностью диагностики периферийных компонентов и несущего транспортного средства.
В частности, диагностика и защита от внешнего вмешательства заключается в проверке работоспособности и корректной реакции на опрашивающие сигналы от модуля диагностики и защиты от внешнего вмешательства. Например, если передний радар вообще не отвечает на опрашивающие сигналы или его ответы отличаются от того, какими они должны быть по протоколу диагностики, может делаться вывод о том, что передний радар находится в ненадлежащем состоянии. Причиной этому может быть то, что он отсутствует (например, намеренно снят или упал сам), поврежден (например, намеренно злоумышленником, случайно в результате столкновения или самопроизвольно под воздействием старения или факторов окружающей среды), несанкционированно заменен, с ним нет связи (например, повреждены или отсоединены провода) или в него было произведено внешнее вмешательство.
Кроме того, диагностика и защита от внешнего вмешательства может содержать контроль сигналов от датчиков, отвечающих за безопасность устройства. Один из таких датчиков может быть расположен в корпусе самого устройства и реагировать на вскрытие корпуса. Например, он может быть реализован в виде датчика объема, магнитного датчика, герконового датчика, датчика Холла и т.д. Также может выполняться контроль отсоединения/присоединения проводов, несанкционированной замены периферии и т.д.
Дополнительно диагностика и защита от внешнего вмешательства может содержать контроль изображения с камер – в частности, может выявляться, что обзор камеры частично или полностью перекрыт или что изображение с камеры является подложным.
Дополнительно диагностика и защита от внешнего вмешательства может содержать контроль звука с микрофонов - в частности, может выявляться неестественное зашумление или подложный аудиопоток.
Модуль диагностики и защиты от внешнего вмешательства содержит собственное дежурное питание, необходимое для поддержания работоспособности в течение некоторого времени, если внешнее питание отключено. Дежурное питание может быть реализовано на базе отдельного микроконтроллера. Дежурное питание может осуществляться от модуля питания устройства и/или при необходимости может содержать отдельную батарею. Емкость батареи зависит от требований конкретного применения.
Модуль диагностики и защиты от внешнего вмешательства может содержать отдельную микросхему (например, микроконтроллер) для выполнения контроля и обработки сигналов либо для этих целей могут использоваться физически или логически выделенные ресурсы (вычислений, памяти, передачи данных) других аппаратных модулей.
Если модуль диагностики и защиты от внешнего вмешательства обнаруживает, что какой-либо компонент (модуль, датчик, периферийный компонент) находится в ненадлежащем состоянии или что произведена попытка внешнего вмешательства, формируется уведомление о соответствующем событии. Уведомление может сохраняться в памяти модуля диагностики и защиты от внешнего вмешательства и/или устройства, может выводиться на планшет инспектора, на экран бортового компьютера транспортного средства, на отдельно выведенный индикатор, может отправляться на удаленный сервер. Также может выводиться звуковое уведомление в виде голосового сообщения или сигнализации. Какой конкретно тип уведомления должен выводиться в данный момент, может зависеть от того, в каком режиме находится устройство. Например, если транспортное средство стоит и закрыто, и устройство находится в режиме бездействия (ожидания), то может выводиться звуковая сигнализация и может передаваться сообщение на удаленный сервер. Если проводится экзамен, транспортное средство находится в движении, и инспектор находится в транспортном средстве, то звук, например, может не выводиться, а уведомление может поступать на планшет инспектора, и инспектор далее может принять решение, является ли данное событие основанием для прекращения или прерывания экзамена или же его можно продолжить. В другом варианте осуществления события из предварительно заданного списка событий или любые события могут автоматически приводить к прекращению или приостановке экзамена. Например, если одновременно не работают модуль постоянной памяти и модуль аварийного хранения данных, информация о дальнейшем ходе экзамена не сможет быть сохранена в память, поэтому может быть целесообразно приостановить его. Если перестала работать камера внутреннего обзора или она частично или полностью перекрыта, дальнейшая запись хода экзамена будет некорректной, поэтому может быть целесообразно приостановить экзамен. Если в дальнейшем выявлено устранение неисправности (например, камера больше не перекрыта), экзамен может продолжиться.
Наличие модуля диагностики и защиты от внешнего вмешательства в предложенном устройстве повышает надежность и безопасность как самого устройства, так и процесса проведения экзамена.
Модуль кибербезопасности
Предложенное устройство имеет объемное и сложное программное обеспечение. Кроме того, с использованием беспроводных технологий оно может управляться извне, обновляться, передавать и принимать данные. Соответственно, злоумышленники могут совершать попытки вмешаться в процедуру проведения экзамена, получить через устройство доступ к данным в памяти устройства и/или на сервере (в том числе к картам, маршрутам, персональным данным, алгоритмам работы) и т.д.
Во избежание подобных угроз, устройство может содержать модуль кибербезопасности, выполненный с возможностью защиты устройства от взлома методами программирования, который мог бы позволить получить контроль над устройством или совершить над ним или с его помощью мошеннические действия. Модуль кибербезопасности контролирует процессы авторизации, соблюдение протоколов шифрования, безопасность и достоверность ключей шифрования, достоверность обновления ПО, а также контролирует входные данные на наличие угроз.
Возможна как аппаратно-программная реализация модуля кибербезопасности (например, в виде отдельной микросхемы или в виде физически выделенной области в кристалле или процессоре), так и чисто программная реализация, при которой программное обеспечение модуля кибербезопасности для своей работы использует функции и ресурсы (вычислений, памяти, передачи данных) других аппаратных модулей.
Если модуль кибербезопасности выявляет, что тот или иной программный процесс или элемент данных является потенциальным источником угрозы и/или является недостоверным, может быть сформировано уведомление о соответствующем событии. Уведомление может сохраняться в памяти модуля кибербезопасности и/или устройства, может выводиться на планшет инспектора, на экран бортового компьютера транспортного средства, на отдельно выведенный индикатор, может отправляться на удаленный сервер. Также может выводиться звуковое уведомление в виде голосового сообщения или сигнализации. Получив уведомление о событии угрозы кибербезопасности, пользователь (например, инспектор на месте или технический специалист удаленно) может выдать указание модулю кибербезопасности о том, как следует обработать угрозу (например, попытаться устранить ее или же проигнорировать), или при наличии надлежащего уровня доступа может самостоятельно осуществить доступ к процессам и данным и выполнить обработку угрозы.
Какой конкретно тип уведомления должен выводиться в данный момент, может зависеть от уровня угрозы и от того, в каком режиме находится устройство. Например, если транспортное средство стоит и закрыто, устройство находится в режиме беспроводного обновления, и модулем кибербезопасности выявлена угроза низкого уровня, то может передаваться сообщение на удаленный сервер, с тем чтобы технический специалист при необходимости проверил состояние устройства. Если проводится экзамен, транспортное средство находится в движении, и инспектор находится в транспортном средстве, то звук, например, может не выводиться, а уведомление может поступать на планшет инспектора, и инспектор далее может принять решение, является ли данное событие основанием для прекращения или прерывания экзамена или же его можно продолжить. В другом варианте осуществления события из предварительно заданного списка событий или любые события могут автоматически приводить к прекращению или приостановке экзамена. Например, если во время экзамена выявлена угроза максимального уровня, которая может привести или уже приводит или привела к некорректной работе модуля постоянной памяти и модуля аварийного хранения данных (например, файлы журнала в результате атаки оказались зашифрованными неизвестным ключом), то информация о ходе экзамена не сможет быть должным образом сохранена, поэтому может быть целесообразно приостановить его. Если в дальнейшем выявлено устранение угрозы (например, процессы и данные, являющиеся источником угрозы, удалены или исправлены, а данные, несущие информацию о ходе экзамена, восстановлены), экзамен может продолжиться.
Наличие модуля кибербезопасности в предложенном устройстве повышает надежность и безопасность как самого устройства, так и процесса проведения экзамена.
Если устройство имеет модуль беспроводного обновления, то наличие модуля кибербезопасности приобретает особенную значимость, так как во время обновления, по существу, основной задачей устройства является прием данных, и вместе с ними и с помощью них выполняется управление или регулировка принципов и алгоритмов работы устройства, то есть вносятся изменения в само программное обеспечение устройства. А поскольку принимаемые данные могут нести в себе угрозу, важно выполнять контроль кибербезопасности. В свою очередь, модуль беспроводного обновления сам по себе позволяет защитить устройство от самых простых и трудноконтролируемых угроз физического доступа к программному обеспечению устройства. Соответственно, наличие в предложенном устройстве и модуля беспроводного обновления, и модуля кибербезопасности обеспечивают в совокупности существенное повышение надежности и безопасности как самого устройства, так и процесса проведения экзамена, и вместе с тем упрощают техническое обслуживание устройства, позволяя поддерживать его в надлежащем состоянии.
Сочетание же в устройстве и модуля кибербезопасности, и модуля беспроводного обновления, и модуля диагностики и защиты от внешнего вмешательства обеспечивают наиболее высокий уровень надежности и безопасности как самого устройства, так и процесса проведения экзамена, позволяя контролировать как физические, так и программные методы воздействия.
Модуль аварийного хранения данных
Модуль 11 аварийного хранения данных предназначен для восстановления данных на случай возникновения сбоя питания и иных нештатных ситуаций, в результате которых может быть прерван процесс проведения экзамена. Поскольку во время экзамена выполняется потоковая запись, обработка и передача видео и других данных, размеры находящихся в обработке файлов могут быть относительно велики, и сбои или нештатные ситуации могут приводить к утрате или повреждению этих файлов.
Модуль 11 аварийного хранения данных синхронизирован с модулем 10 постоянной памяти и сохраняет в реальном времени критически важные данные о процессе (в том числе протокол экзамена), а также информацию о том, с каким файлом в данный момент работает модуль 10 постоянной памяти, и состояние этого файла. Аппаратная реализация модуля 11 аварийного хранения данных представляет собой отдельную микросхему условно нестираемой памяти – например, банк флэш-памяти, содержащий собственный контроллер, который не допускает операции стирания из салона транспортного средства и извне.
Модуль 11 аварийного хранения данных служит дополнительной защитой как инспектора, так и экзаменуемого, выполняя функцию, подобную «черному ящику». При необходимости данные, записанные на этот модуль, могут помочь восстановить все или часть данных модуля 10 постоянной памяти, если они были по какой-либо причине утрачены или повреждены, или по крайней мере установить обстоятельства, при которых это произошло.
Таким образом, наличие модуля аварийного хранения данных в предложенном устройстве повышает надежность и безопасность как самого устройства, так и процесса проведения экзамена.
Модуль питания
Модуль 12 питания необходим в связи с тем, что собственная бортовая сеть транспортного средства крайне нестабильна и подвержена серьезным скачкам и просадкам напряжения, особенно при запуске двигателя и всех штатных систем транспортного средства. Эти процессы могут длиться довольно долго, из-за чего предложенное устройство 100 может постоянно перезагружаться, что может негативно сказаться на его работоспособности. Кроме того, в бортовой сети возможна длительная просадка напряжения питания в связи с недостатком заряда аккумулятора или слишком большим текущим потреблением, что может резко снизить производительность предложенного устройства 100, приводя к невозможности его нормальной работы, а следовательно, и к нарушению процедуры проведения экзамена.
Модуль 12 питания содержит контроллер питания, предназначенный для контроля питания в бортовой сети транспортного средства и подачи питания от резервного источника питания на модули устройства 100, если питание в бортовой сети ниже, чем требуется для корректного проведения экзамена, или сглаживания/отсечки скачков, если питание в бортовой сети выше допустимого.
В предпочтительном варианте осуществления модуль 12 питания содержит в качестве резервного источника питания суперконденсатор типоразмером не более 1-DIN, чтобы устройство 100 оставалось достаточно компактным, по-прежнему имея возможность заключать все модули в едином корпусе для повышения надежности и безопасности. С учетом требуемой производительности устройства 100 и выполняемого им круга задач емкости суперконденсатора такого размера может быть достаточно для поддержания работоспособности устройства 100 вплоть до 1 минуты даже при полном отсутствии питания в бортовой сети (например, в случае аварии), что может позволить устройству 100 (или хотя бы модулю аварийного хранения данных) корректно завершить все процессы и сохранить данные перед выключением. В случае же небольших спадов напряжения длительность поддержания производительности существенно возрастает.
В другом варианте осуществления резервное питание может осуществляться от дополнительного аккумулятора. В таком случае аккумулятор вынесен за пределы устройства, а модуль 12 питания в рамках корпуса устройства 100 содержит только контроллер и шину питания.
Наличие модуля питания в предложенном устройстве повышает надежность и безопасность как самого устройства, так и процесса проведения экзамена.
Операционная система
Предложенное устройство содержит множество разнообразных аппаратных и аппаратно-программных модулей. В процессе жизненного цикла в устройстве выполняется множество различных программ, задействующих множество различных аспектов работы с данными. Соответственно, для организации всех процессов в устройстве установлена операционная система, способная обслуживать устройство с учетом всей его периферии и имеющегося функционала. В одном неограничивающем примере может использоваться ОС Linux.
Типовой сценарий проведения экзамена
Далее будет описан типовой сценарий проведения экзамена, который является главной функцией предложенного устройства 100.
Карта местности, на которой будет проводиться экзамен, составляется заранее. Формат карты может быть разным и зависит от требований конкретного применения. В одном неограничивающем примере карты имеют формат HD map.
На карте размечаются полосы движения, координаты и содержание знаков, светофоров, пешеходных переходов и других элементов дорог, которые необходимо принимать во внимание при составлении маршрутов и при проведении экзамена. Требуемым участкам присваиваются соответствующие ограничения. Уточнение координат производится, как правило, вручную оператором. Тем не менее, в одном из вариантов осуществления возможно использование предложенного устройства 100 и его функциональных возможностей для определения координат и помощи в разметке карт.
Маршруты проведения экзамена формируются пользователем / оператором системы или автоматически системой с учетом необходимости проверки максимально возможного или предварительно заданного порогового количества навыков и ошибок (или пунктов регламента) за время, отведенное на экзамен, и при необходимости с учетом минимальной повторяемости упражнений, заданий и маневров. Опционально могут учитываться и иные факторы, такие как средняя загруженность дорог на данном участке в это время дня и день недели, средняя скорость движения на данном участке, количество ДТП на данном участке за последний период времени, прогнозируемые погодные условия, качество дорожного покрытия, результаты предыдущих экзаменов на данном участке, наличие видимой дорожной разметки и т.д. Что касается видимой дорожной разметки, следует отметить, что если экзамен проводится на дороге, где не видна разметка, для кандидатов может снижаться строгость требований по соблюдению полосы движения. Соответствующая настройка устройства 100 для предстоящего экзамена выполняется пользователем или оператором. При необходимости сформированный маршрут (или несколько вариантов маршрута) утверждаются ответственными лицами – например, подписываются электронной подписью.
Утвержденный маршрут (или набор маршрутов) автоматически через модуль 8 беспроводного обновления или вручную инспектором через флеш-накопитель загружается в устройство 100. Также в устройстве 100 перед экзаменом могут обновляться карты и выполняться коррекция координат.
Кандидат в водители садится в транспортное средство, камера внутреннего обзора идентифицирует его, и устройство или система дает доступ к экзамену. Инспектор сидит рядом, запускает ход экзамена у себя в приложении на планшете и дает команду водителю начинать движение.
Во время движения производится аудио и видеозапись, а также контролируется весь процесс проведения экзамена с помощью вышеописанных модулей. При возникновении формализованных ошибок вождения они фиксируются в протоколе автоматически устройством, неформализованные ошибки помечаются в планшете инспектором. При приближении к инициирующим точкам в приоритетном режиме запускается, а затем отрабатывает модуль 2 ускорения нейронных сетей. Необходимые данные непосредственно в ходе проведения экзамена отправляются на удаленный сервер.
После окончания экзамена протокол подписывается кандидатом и инспектором и отправляется на удаленный сервер.
Корпус
По возможности все блоки предложенного устройства заключены в едином корпусе, если это позволяют осуществить требования конкретной реализации.
В одном из вариантов осуществления корпус предложенного устройства имеет типоразмер 2-DIN, так чтобы повысить скорость и удобство его монтажа в транспортном средстве – в частности, на центральной консоли. В уровне техники не выявлены настолько компактные полнофункциональные защищенные устройства для проведения практической части экзамена на право управления транспортными средствами.
В других вариантах осуществления корпус предложенного устройства может иметь другие размеры и/или устанавливаться в другие положения – например, в труднодоступное положение под капотом автомобиля вблизи от центральной консоли.
При необходимости на корпусе устройства могут быть расположены средства управления и/или ввода/вывода – например, дисплей, клавиатура, динамик, разъем для USB-накопителя. Такая реализация повышает удобство использования. Средства управления и/или ввода/вывода могут быть защищены от случайного или злонамеренного нажатия/прикосновения – например, с помощью прозрачного или непрозрачного кожуха.
В других вариантах осуществления для повышения надежности и безопасности на корпусе могут не располагаться никакие средства управления и/или ввода/вывода или могут располагаться только кнопка питания и индикатор питания.
Способ
Далее будет описан способ контроля управления транспортным средством согласно настоящему изобретению. Частным случаем способа является способ проведения экзамена на право управления транспортными средствами.
Следует понимать, что данный способ соответствует вышеописанным функциям, выполняемым каждым из блоков в устройстве 100, и если какая-либо информация не раскрывается применительно к способу, но раскрывается применительно к устройству, и наоборот, то это не подразумевает, что в устройстве или способе эта функция или этап не может выполняться, а сделано лишь для того, чтобы не загромождать описание повторением подробностей.
Способ контроля управления транспортным средством в целом содержит этап, на котором загружают в память устройства карту и предварительно размеченный маршрут движения транспортного средства.
Дополнительно способ содержит этап, на котором идентифицируют водителя на основе данных, введенных пользователем, или на основе распознавания с помощью периферийных компонентов устройства.
Дополнительно способ содержит этап, на котором оценивают правильность выполнения задания на основе обработки данных, принимаемых устройством от периферийных модулей.
Дополнительно способ содержит этап, на котором определяют местоположение данного транспортного средства на основе принимаемых навигационных данных.
Дополнительно способ содержит этап, на котором определяют приближение транспортного средства к инициирующей точке или участку на маршруте и запускают модуль ускорения нейронных сетей для обработки события, соответствующего данной точке или участку, с использованием предварительно обученной нейронной сети.
Дополнительно способ содержит этап, на котором сохраняют данные о ходе проведения экзамена в модуле постоянной памяти устройства и передают данные о ходе проведения экзамена на удаленный сервер.
Дополнительно способ содержит этап, на котором синхронно с модулем постоянной памяти сохраняют в реальном времени данные о процессе проведения экзамена и информацию о том, с каким файлом в данный момент работает модуль постоянной памяти, и состояние этого файла, с помощью модуля аварийного хранения данных, содержащего условно нестираемую память.
Дополнительно способ содержит этап, на котором выполняют обновление программного обеспечения и рабочих данных устройства беспроводным образом с удаленного сервера.
Дополнительно способ содержит этап, на котором выполняют контроль программных процессов и/или элементов данных на предмет недостоверности или наличия угроз для защиты устройства от взлома методами программирования с помощью модуля кибербезопасности.
Дополнительно способ содержит этап, на котором с помощью модуля диагностики и защиты от внешнего вмешательства контролируют внутренние модули и/или периферийные модули устройства для определения их работоспособности и корректности выдаваемых сигналов и/или данных и контролируют сигналы от датчиков, отвечающих за безопасность устройства.
Дополнительно способ содержит этап, на котором с помощью модуля питания контролируют питание в бортовой сети транспортного средства и подают питание от резервного источника питания на модули устройства, если питание в бортовой сети ниже, чем требуется для корректного проведения экзамена, или сглаживания скачков питания, если питание в бортовой сети выше допустимого.
Предложенный способ контроля управления транспортным средством обеспечивает полный контроль управления транспортным средством в рамках предварительно заданного перечня упражнений, маневров и проверок с повышенной безопасностью, надежностью и пониженными затратами, при этом уменьшается человеческий фактор, повышается прозрачность экзамена и выставления оценки и повышается уровень доверия к экзамену и к экзаменатору. Для самого экзаменатора упрощается процедура проведения экзамена, так как ему требуется совершать меньше действий, а большинство из его действий и решений подтверждаются (поддерживаются) предложенным способом.
Применение
Устройства, системы и способы согласно настоящему изобретению можно использовать для контроля управления транспортным средством в целом и для проведения практической части экзамена на право управления транспортными средствами в частности.
Дополнительные особенности реализации
Модуль беспроводной связи и модуль проводной связи могут содержать передатчик и приемник. Передатчик и приемник физически могут быть одним блоком или разными блоками.
Различные иллюстративные блоки и модули, описанные в связи с раскрытием сущности в данном документе, могут реализовываться или выполняться с помощью процессора общего назначения, процессора цифровых сигналов (DSP), специализированной интегральной схемы (ASIC), программируемой пользователем вентильной матрицы (FPGA) или другого программируемого логического устройства (PLD), дискретного логического элемента или транзисторной логики, дискретных аппаратных компонентов либо любой комбинации вышеозначенного, предназначенной для того, чтобы выполнять описанные в данном документе функции. Процессор общего назначения может представлять собой микропроцессор, но в альтернативном варианте, процессор может представлять собой любой традиционный процессор, контроллер, микроконтроллер или конечный автомат. Процессор также может реализовываться как комбинация вычислительных устройств (к примеру, комбинация DSP и микропроцессора, несколько микропроцессоров, один или более микропроцессоров вместе с DSP-ядром либо любая другая подобная конфигурация).
Некоторые блоки или модули по отдельности или вместе могут представлять собой, например, компьютер, и включать в себя процессор, который сконфигурирован для вызова и выполнения компьютерных программ из памяти для выполнения этапов способа или функций блоков или модулей в соответствии с вариантами осуществления настоящего изобретения. Согласно вариантам осуществления, устройство может дополнительно включать в себя память. Процессор может вызывать и выполнять компьютерные программы из памяти для выполнения способа. Память может быть отдельным устройством, независимым от процессора, или может быть интегрирована в процессор. Память может хранить код, инструкции, команды и/или данные для исполнения на наборе из одного или более процессоров описанного устройства. Коды, инструкции, команды могут предписывать процессору выполнять этапы способа или функции устройства.
Функции, описанные в данном документе, могут реализовываться в аппаратном обеспечении, программном обеспечении, выполняемом посредством одного или более процессоров, микропрограммном обеспечении или в любой комбинации вышеозначенного. Аппаратные и программные средства, реализующие функции, также могут физически находиться в различных позициях, в том числе согласно такому распределению, что части функций реализуются в различных физических местоположениях, то есть может выполняться распределенная обработка или распределенные вычисления.
В случае если объем данных велик, может производиться многопоточная обработка данных, которая в простом представлении может выражаться в том, что все множество подлежащих обработке данных разделяется на набор подмножеств, и каждое ядро процессора выполняет обработку в отношении назначенного для него подмножества данных.
Вышеупомянутая память может быть энергозависимой или энергонезависимой памятью или может включать в себя как энергозависимую, так и энергонезависимую память. Специалисту в области техники должно быть также понятно, что, когда речь идет о памяти и о хранении данных, программ, кодов, инструкций, команд и т.п., подразумевается наличие машиночитаемого (или компьютерно-читаемого, процессорно-читаемого) запоминающего носителя. Машиночитаемые носители данных включают в себя как некратковременные компьютерные носители хранения данных, так и среду связи, включающую в себя любую передающую среду, которая упрощает перемещение компьютерной программы или ее части из одного места в другое. Некратковременный машиночитаемый запоминающий носитель может представлять собой любой доступный носитель, который может использоваться для того, чтобы переносить или сохранять требуемое средство программного кода в форме инструкций или структур данных, и к которому можно осуществлять доступ посредством компьютера, процессора или иного устройства обработки общего назначения или специального назначения.
В качестве примера, а не ограничения, машиночитаемые носители могут содержать постоянное запоминающее устройство (ROM), программируемое постоянное запоминающее устройство (PROM), стираемое программируемое постоянное запоминающее устройство (EPROM), электронно-стираемое программируемое постоянное запоминающее устройство (EEPROM), флэш-память, оперативную память (RAM), статическую память с произвольным доступом (SRAM), динамическую память с произвольным доступом (DRAM), синхронную динамическую память с произвольным доступом (SDRAM), синхронную динамическую память с произвольной выборкой с двойной скоростью передачи данных (DDR SDRAM), синхронную динамическую память с произвольной выборкой с повышенной скоростью (ESDRAM), DRAM с синхронной линией связи (SLDRAM) и оперативную память с шиной прямого доступа (DR RAM), регистр, кэш-память, полупроводниковые запоминающие устройства, магнитные носители, такие как внутренние жесткие диски и съемные диски, магнитооптические носители и оптические носители, такие как диски CD-ROM и цифровые универсальные диски (DVD), а также любые другие известные в уровне техники носители данных.
Информация и сигналы, описанные в данном документе, могут представляться с помощью любой из множества различных технологий. Например, данные, инструкции, команды, информация, сигналы, биты, символы и элементарные сигналы, которые могут приводиться в качестве примера в вышеприведенном описании, могут представляться посредством напряжений, токов, электромагнитных волн, магнитных полей или частиц, оптических полей или частиц либо любой комбинации вышеозначенного.
По меньшей мере один из этапов в способе или блоков/модулей в устройстве может использовать модель искусственного интеллекта (AI) для выполнения соответствующих операций. Функция, связанная с AI, может выполняться через процессор и энергонезависимую и/или энергозависимую память.
Процессор может включать в себя один или более процессоров. В то же время, один или более процессоров могут быть процессором общего назначения, например центральным процессором (CPU), прикладным процессором (AP) и т.п., блоком обработки только графики, таким как графический процессор (GPU), визуальный процессор (VPU), и/или специализированным процессором AI, таким как нейронный процессор (NPU).
Один или несколько процессоров управляют обработкой входных данных в соответствии с предварительно определенным правилом работы или моделью искусственного интеллекта (AI), хранящейся в энергонезависимой памяти и/или энергозависимой памяти. Предварительно определенное правило работы или модель искусственного интеллекта могут быть получены путем обучения. При этом процессор может выполнять операцию предварительной обработки данных для преобразования в форму, подходящую для использования в качестве входных данных для модели искусственного интеллекта.
«Получены путем обучения» означает, что посредством применения алгоритма обучения к множеству обучающих данных создается предварительно определенное правило работы или модель AI с желаемой характеристикой. Обучение может выполняться на самом устройстве, в котором выполняется AI согласно варианту осуществления, и/или может быть реализовано через отдельный сервер/систему.
Модель искусственного интеллекта может включать в себя множество слоев нейронной сети. Каждый из множества слоев нейронной сети включает в себя множество весовых значений и выполняет рабочую операцию для данного слоя путем вычисления в отношении результата вычисления предыдущего слоя и множества весовых значений.
Примеры нейронных сетей включают, помимо прочего, сверточную нейронную сеть (CNN), глубокую нейронную сеть (DNN), рекуррентную нейронную сеть (RNN), ограниченную машину Больцмана (RBM), глубокую сеть доверия (DBN), двунаправленную рекуррентную глубокую нейронную сеть (BRDNN), генеративно-состязательные сети (GAN) и глубокие Q-сети.
Алгоритм обучения - это метод обучения предварительно определенного целевого устройства (например, нейронной сети на базе NPU) с использованием множества обучающих данных, чтобы вызывать, разрешать или управлять целевым устройством для выполнения определения или прогнозирования. Примеры алгоритмов обучения включают, но не ограничиваются ими, обучение с учителем, обучение без учителя, обучение с частичным привлечением учителя или обучение с подкреплением.
Следует понимать, что хотя в настоящем документе для описания различных элементов, компонентов, областей, слоев и/или секций, могут использоваться такие термины, как "первый", "второй", "третий" и т.п., эти элементы, компоненты, области, слои и/или секции не должны ограничиваться этими терминами. Эти термины используются только для того, чтобы отличить один элемент, компонент, область, слой или секцию от другого элемента, компонента, области, слоя или секции. Так, первый элемент, компонент, область, слой или секция может быть назван вторым элементом, компонентом, областью, слоем или секцией без выхода за рамки объема настоящего изобретения. В настоящем описании термин "и/или" включает любые и все комбинации из одной или более из соответствующих перечисленных позиций. Элементы, упомянутые в единственном числе, не исключают множественности элементов, если отдельно не указано иное.
Функциональность элемента, указанного в описании или формуле изобретения как единый элемент, может быть реализована на практике посредством нескольких компонентов устройства, и наоборот, функциональность элементов, указанных в описании или формуле изобретения как несколько отдельных элементов, может быть реализована на практике посредством единого компонента.
В одном варианте осуществления элементы/блоки/модули предложенного устройства находятся в общем корпусе, могут быть размещены на одной раме/конструкции/печатной плате/кристалле и связаны друг с другом конструктивно посредством монтажных (сборочных) операций и функционально посредством линий связи. Упомянутые линии или каналы связи, если не указано иное, являются типовыми, известными специалистам линиями связи, материальная реализация которых не требует творческих усилий. Линией связи может быть провод, набор проводов, шина, дорожка, беспроводная линия связи (индуктивная, радиочастотная, инфракрасная, ультразвуковая и т.д.). Протоколы связи по линиям связи известны специалистам и не раскрываются отдельно.
Под функциональной связью элементов следует понимать связь, обеспечивающую корректное взаимодействие этих элементов друг с другом и реализацию той или иной функциональности элементов. Частными примерами функциональной связи может быть связь с возможностью обмена информацией, связь с возможностью передачи электрического тока, связь с возможностью передачи механического движения, связь с возможностью передачи света, звука, электромагнитных или механических колебаний и т.д. Конкретный вид функциональной связи определяется характером взаимодействия упомянутых элементов, и, если не указано иное, обеспечивается широко известными средствами, используя широко известные в технике принципы.
Конструктивное исполнение элементов предложенного устройства является известным для специалистов в данной области техники и не описывается отдельно в данном документе, если не указано иное. Элементы устройства могут быть выполнены из любого подходящего материала. Эти составные части могут быть изготовлены с использованием известных способов, включая, лишь в качестве примера, механическую обработку на станках, литьё по выплавляемой модели, наращивание кристаллов. Операции сборки, соединения и иные операции в соответствии с приведенным описанием также соответствуют знаниям специалиста в данной области и, таким образом, более подробно поясняться здесь не будут.
Несмотря на то, что примерные варианты осуществления были подробно описаны и показаны на сопроводительных чертежах, следует понимать, что такие варианты осуществления являются лишь иллюстративными и не предназначены ограничивать настоящее изобретение, и что данное изобретение не должно ограничиваться конкретными показанными и описанными компоновками и конструкциями, поскольку специалисту в данной области техники на основе информации, изложенной в описании, и знаний уровня техники могут быть очевидны различные другие модификации и варианты осуществления изобретения, не выходящие за пределы сущности и объема данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ДЛЯ КОНТРОЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2021 |
|
RU2801076C2 |
| СПОСОБ ОТСЛЕЖИВАНИЯ ДЕЙСТВИЙ ВОДИТЕЛЯ ПРИ ПРОВЕДЕНИИ ЭКЗАМЕНА НА ПРАВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2023 |
|
RU2814461C1 |
| Бортовое устройство для проведения экзамена на право управления транспортными средствами | 2023 |
|
RU2829004C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ КОНТРОЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2021 |
|
RU2788826C1 |
| Информационно-технологический комплекс управления и контроля на маршрутизированном пассажирском транспорте | 2023 |
|
RU2819665C1 |
| УСТРОЙСТВО И СИСТЕМА РЕГИСТРАЦИИ ДОРОЖНОЙ ОБСТАНОВКИ | 2020 |
|
RU2749527C1 |
| СПОСОБЫ, УСТРОЙСТВА И КАРТОГРАФИЧЕСКИЕ БАЗЫ ДАННЫХ ДЛЯ ПРОКЛАДКИ "ЗЕЛЕНОГО" МАРШРУТА | 2008 |
|
RU2523192C2 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО С АДАПТИВНЫМИ ИНСТРУКЦИЯМИ ПО НАВИГАЦИИ | 2006 |
|
RU2413927C2 |
| Способ экстренного оповещения при опасных ситуациях и авариях на дорогах | 2019 |
|
RU2728951C1 |
| УЛУЧШЕННОЕ НАВИГАЦИОННОЕ УСТРОЙСТВО И СПОСОБ | 2007 |
|
RU2459262C2 |
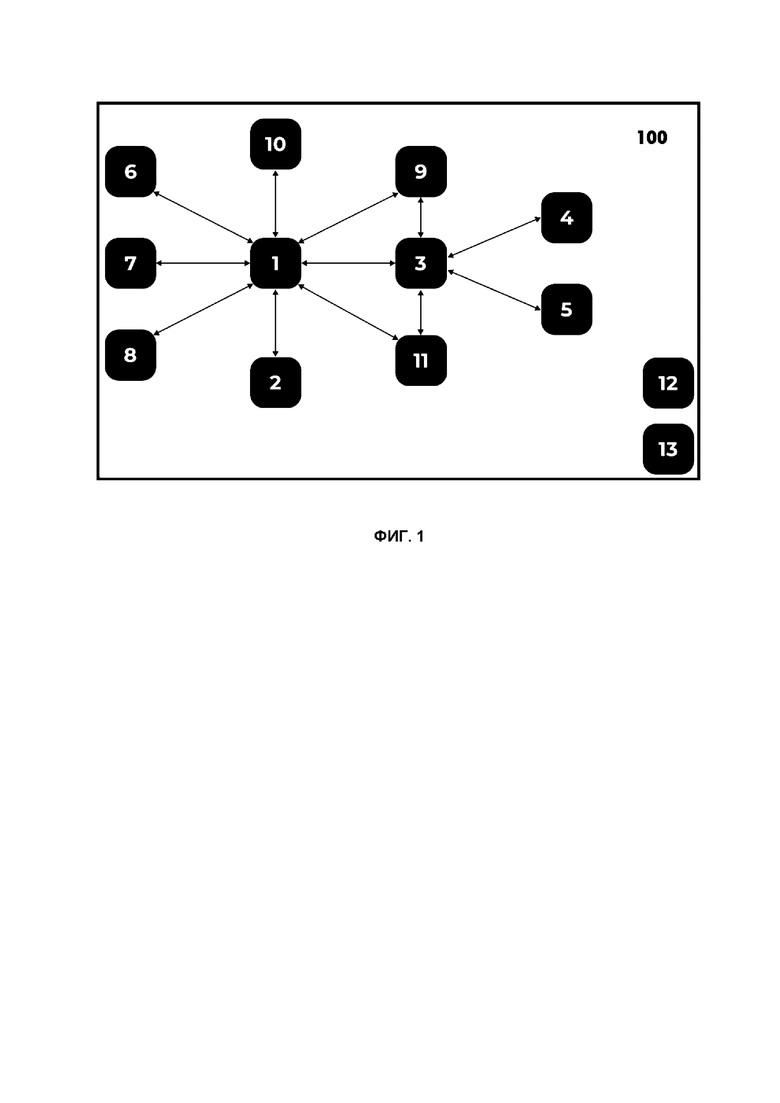
Изобретение относится к области контроля управления транспортным средством. Технический результат – создание компактного полнофункционального защищенного устройства, в котором повышается общая производительность и снижается потребление ресурсов при поддержании всего необходимого функционала устройства. Бортовое устройство содержит модуль обработки, два модуля памяти, модуль проводной связи, модуль навигации и модуль ускорения нейронных сетей, содержащий аппаратный ускоритель нейронных сетей, выполненный с возможностью выполнения задач обработки, которые необходимо выполнять с использованием нейронных сетей, причем модуль обработки выполнен с возможностью определения приближения устройства к предварительно заданной инициирующей точке или участку на маршруте и запуска модуля ускорения нейронных сетей для обработки события, соответствующего данной точке или участку, с использованием предварительно обученной нейронной сети. 2 н. и 10 з.п. ф-лы, 1 ил.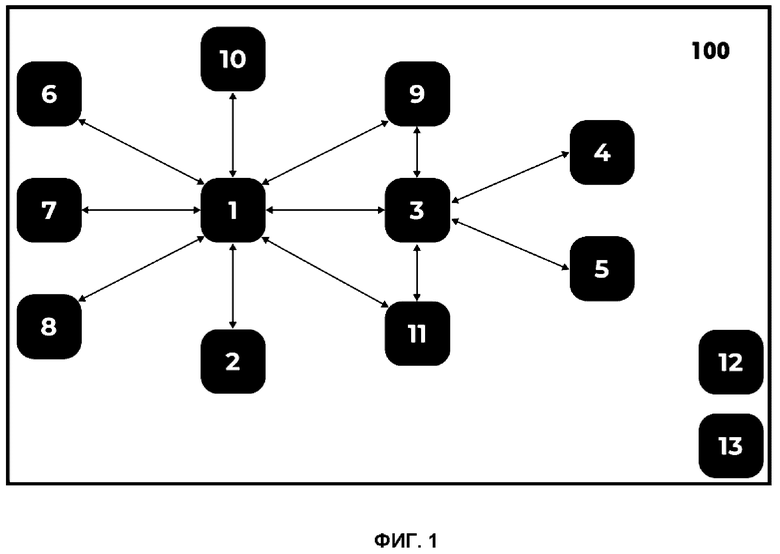
1. Бортовое устройство для контроля управления транспортным средством, содержащее:
первый модуль обработки, выполненный с возможностью обеспечения функционирования операционной системы и других модулей устройства посредством предоставления им ресурсов вычислений и/или обработки;
первый модуль памяти, выполненный с возможностью временного хранения данных, необходимых модулям устройства в процессе выполнения текущих задач;
модуль проводной связи, выполненный с возможностью осуществления проводной связи с периферийными компонентами устройства, причем периферийные компоненты устройства содержат по меньшей мере одну камеру;
второй модуль памяти, выполненный с возможностью постоянного хранения программ и данных устройства, в том числе карты местности, маршрута движения транспортного средства и видеозаписи с по меньшей мере одной камеры;
модуль навигации, выполненный с возможностью определения местоположения данного устройства на карте местности на основе принимаемых навигационных данных; и
модуль ускорения нейронных сетей, содержащий аппаратный ускоритель нейронных сетей, выполненный с возможностью выполнения задач обработки, которые необходимо выполнять с использованием нейронных сетей,
причем первый модуль обработки выполнен с возможностью определения приближения устройства к предварительно заданной инициирующей точке или участку на маршруте и запуска модуля ускорения нейронных сетей для обработки события, соответствующего данной точке или участку, с использованием предварительно обученной нейронной сети.
2. Устройство по п. 1, дополнительно содержащее второй модуль обработки, выполненный с возможностью обеспечения обмена данными между первым модулем обработки и первым модулем памяти с одной стороны и модулем навигации и модулем проводной связи с другой стороны.
3. Устройство по п. 1, в котором первый модуль обработки выполнен с возможностью поиска объекта, соответствующего упомянутому событию, на изображении с камеры с помощью метода компьютерного зрения, не использующего нейросети, обрезки изображения до области интереса, содержащей только найденный объект, и подачи изображения области интереса на вход модуля ускорения нейронных сетей.
4. Устройство по п. 1, в котором работа модуля ускорения нейронных сетей имеет высокий приоритет.
5. Устройство по п. 1, в котором работа модуля навигации и модуля проводной связи имеет более высокий приоритет, чем работа модуля ускорения нейронных сетей.
6. Устройство по п. 1, дополнительно содержащее модуль беспроводной связи, соединенный с первым модулем обработки и выполненный с возможностью передачи на удаленный сервер видеозаписи, сохраненной во втором модуле памяти,
при этом второй модуль памяти выполнен с возможностью удаления фрагментов видеозаписи, успешно переданных на удаленный сервер.
7. Устройство по п. 6, в котором передача на удаленный сервер видеозаписи, сохраненной во втором модуле памяти, с помощью модуля беспроводной связи продолжается во время работы модуля ускорения нейронных сетей с максимально доступной скоростью передачи.
8. Устройство по п. 1, в котором первый модуль обработки выполнен с возможностью оценки правильности выполнения водителем упражнений, заданий или маневров на маршруте на основе обработки данных, принимаемых устройством от периферийных модулей и от модуля навигации.
9. Устройство по п. 1, в котором контроль управления транспортным средством выполняется в процессе проведения экзамена на право управления транспортными средствами, маршрут движения транспортного средства является маршрутом проведения экзамена, инициирующая точка или участок на маршруте и соответствующее событие связаны с выполнением упражнения, задания или маневра экзаменуемым кандидатом в водители в процессе проведения экзамена, и обработка события модулем ускорения нейронных сетей включает в себя проверку правильности выполнения упражнения, задания или маневра в процессе проведения экзамена.
10. Способ контроля управления транспортным средством, выполняемый в устройстве для контроля управления транспортным средством, содержащий этапы, на которых:
принимают с помощью модуля проводной связи сигналы и/или данные с периферийных компонентов устройства, причем периферийные компоненты устройства содержат по меньшей мере одну камеру;
сохраняют в постоянной памяти устройства программы и данные устройства, в том числе карту местности, маршрут движения транспортного средства и видеозапись с по меньшей мере одной камеры;
определяют с помощью модуля навигации местоположение данного устройства на карте местности на основе принимаемых навигационных данных;
определяют с помощью первого модуля обработки приближение устройства к предварительно заданной инициирующей точке или участку на маршруте;
запускают модуль ускорения нейронных сетей для обработки события, соответствующего данной точке или участку, с использованием предварительно обученной нейронной сети.
11. Способ по п. 10, дополнительно содержащий этап, на котором с помощью первого модуля обработки выполняют оценку правильности выполнения водителем упражнений, заданий или маневров на маршруте на основе обработки данных, принимаемых устройством от периферийных модулей и от модуля навигации.
12. Способ по п. 10, в котором контроль управления транспортным средством выполняется в процессе проведения экзамена на право управления транспортными средствами, маршрут движения транспортного средства является маршрутом проведения экзамена, инициирующая точка или участок на маршруте и соответствующее событие связаны с выполнением упражнения, задания или маневра экзаменуемым кандидатом в водители в процессе проведения экзамена, и обработка события модулем ускорения нейронных сетей включает в себя проверку правильности выполнения упражнения, задания или маневра в процессе проведения экзамена.
| CN 104199510 A, 10.12.2014 | |||
| Токарный резец | 1924 |
|
SU2016A1 |
| US 10625745 B1, 21.04.2020 | |||
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ И ОЦЕНКИ ВЫПОЛНЕНИЯ КОНТРОЛЬНЫХ УПРАЖНЕНИЙ ПРАКТИЧЕСКОГО ЭКЗАМЕНА НА ПОЛУЧЕНИЕ ПРАВА УПРАВЛЕНИЯ ТРАНСПОРТНЫМИ СРЕДСТВАМИ РАЗЛИЧНЫХ КАТЕГОРИЙ | 2015 |
|
RU2580091C1 |

