Область техники
Изобретение относится к области ракетно-космической техники и может найти применение при создании возвращаемых частей космических аппаратов.
Уровень техники
Одним из важных современных направлений развития ракетно-космической техники является многоразовость использования ее элементов, в частности, первых и вторых ступеней ракет-носителей космического назначения. Это позволяет сократить стоимость одного запуска и время на подготовку очередного запуска.
К таким элементам космической техники, которые могли бы стать многоразовыми, относится возвращаемый аппарат, который в составе космического аппарата предназначен для запуска на околоземную или на окололунную орбитальные станции и последующего возвращения на Землю космонавтов.
Известен проект возвращаемого аппарата и способа его спуска в атмосфере Земли в составе пилотируемого космического аппарата СССР «Союз-МС» (Википедия), разработанный в середине 60-х годов прошлого века и успешно используемый до настоящего времени для доставки трех космонавтов на международную космическую станцию и последующего возвращения на Землю. Возвращаемый аппарат имеет колоколообразную форму, в верхней части которого размещен стыковочный узел, боковые поверхности имеют теплозащитное покрытие, в донной части имеется теплозащитный экран, отстреливаемый перед мягкой посадкой на Землю, для спуска с орбиты используется парашютная система, раскрываемая после прохождения участка траектории с большим скоростным напором, и двигатели мягкой посадки для гашения остаточной скорости вертикального снижения на парашютах. Достоинством аппарата и способа его спуска является его сравнительная простота. Вместе с тем существенными недостатками аппарата и способа его спуска являются большие перегрузки, испытываемые космонавтами при прохождении плотных слоев атмосферы, низкая точность обеспечения заданных координат приземления, необходимость иметь на борту двигатели мягкой посадки, невозможность многократного использования аппарата и непригодность аппарата для полетов к Луне.
Известен проект многоразового возвращаемого аппарата и способа его спуска в атмосфере Земли в составе космического корабля «Orion» разработки фирмы «Lockheed Martin» США (Орион (космический корабль) - Википедия), принятый за аналог, который представляет собой усеченный конус высотой 3,3 м и максимальным диаметром у основания 5,3 м, боковая поверхность которого закрыта теплозащитными панелями, а сферическое днище закрыто теплозащитным экраном. Аппарат предназначен для полетов к Луне (и далее к Марсу) и последующего возвращения на Землю. Посадка осуществляется на незамерзающую морскую поверхность. Аппарат вмещает шесть астронавтов, снабжен парашютами для спуска в атмосфере Земли и тормозными двигателями для мягкого приводнения, в верхней части расположен стыковочный узел. В ноябре 2022 г. аппарат совершил беспилотный десятидневный облет Луны с одним манекеном на борту и успешно приводнился. Очевидными достоинствами проекта являются большой свободный объем аппарата (9 м3), не занятый оборудованием, меньшие величины перегрузок астронавтов (3g) при спуске, возможность полета к Луне с последующим возвращением на Землю. Недостатки проекта связаны с использованием парашютов для спуска, при использовании которых низкая точность выхода в заданный район приземления нивелируется посадкой на морскую поверхность.
Известен проект многоразового возвращаемого аппарата и способа его спуска в атмосфере Земли, разрабатываемого фирмой РКК «Энергия» РФ в составе космического корабля «Орел» (Орел (космический корабль) - Википедия), принятый за прототип, в котором многоразовый возвращаемый аппарат во многом повторяет аппарат в составе космического корабля «Орион». Основное конструктивное отличие состоит в том, что многоразовый возвращаемый аппарат «Орла» приземляется на сушу и использует при посадке кроме двигателей мягкой посадки четыре выдвижных амортизирующих опоры, выдвигаемые после отстрела теплозащитного экрана, установленного на днище. Достоинства проекта те же, что и в проекте «Орион». Основной недостаток прототипа: низкая точность выхода в заданный район приземления и наличие четырех выдвижных амортизирующих опор, выдвигаемых после отстрела теплозащитного экрана.
Таким образом, известные технические решения не обеспечивают необходимую точность приведения многоразового возвращаемого аппарата в заданный район приземления при сохранении сравнительной простоты конструкции.
Раскрытие сущности изобретения
Предлагается многоразовый возвращаемый аппарат и способ его спуска в атмосфере Земли, содержащее узел несущего винта и систему управления, обеспечивающие спуск в атмосфере Земли «по-вертолетному» в режиме авторотации несущего винта и необходимую точность приведения аппарата в заданный район приземления.
a. Многоразовый возвращаемый аппарат представляет собой усеченный конус с металлическим силовым набором, в верхней части которого расположен стыковочный узел. Его боковая поверхность закрыта тепловыми панелями, днище защищено сферическим тепловым экраном. Аппарат снабжен системами управления, ориентации, навигации, включая аппаратуру потребителя системы спутниковой навигации, и системой жизнеобеспечения экипажа. В верхней части аппарата размещен узел несущего винта для спуска аппарата в атмосфере Земли «по-вертолетному», втулка которого способна вращаться вместе с закрепленными во втулке лопастями на участке спуска в атмосфере Земли в режиме авторотации. Для управления общим и циклическим шагом лопастей они встроены во втулку своим осевым шарниром. Для управления положением лопастей относительно оси шарнира применен реверсивный шаговый электродвигатель, вставленный во втулку вместе с датчиком угла поворота лопасти.
b. Перед стартом аппарата лопасти несущего винта повернуты относительно своих горизонтальных шарниров, прижаты к образующей конуса аппарата и прикреплены к нему в концевой части с помощью скобы с пироболтом. Вертикальный шарнир лопасти размещен между осевым и горизонтальным шарнирами.
c. Система управления аппарата осуществляет управление числом оборотов несущего винта при движении аппарата по траектории спуска путем задания общего шага установки лопасти.
d. Система управления аппарата обеспечивает его приведение в заданный район приземления путем управления при движении по траектории спуска циклическим шагом лопастей и стабилизацией углового положения аппарата в пространстве.
е. Способ спуска в атмосфере Земли многоразового возвращаемого аппарата содержит операции управления ориентацией продольной оси аппарата по направлению вектора скорости движения на внеатмосферном и атмосферном участках траектории спуска. Спуск состоит из нескольких этапов. На начальном этапе лопасти несущего винта освобождаются от крепления, выводятся в рабочее положение за счет набегающего потока воздуха и переводятся на режим авторотации. На этапе движения в верхних слоях атмосферы Земли по пологой или по двухнырковой траектории с непрерывно уменьшающейся скоростью движения осуществляется управление общим и циклическим шагом лопастей. На этапе движения по траектории спуска с большим скоростным напором лопасти винта поднимаются во флюгерное положение, подобно стеблям морковки. После прохождения участка траектории с большим скоростным напором осуществляется выход на участок траектории с установившимся пониженным скоростным напором и пониженной скоростью вертикального снижения, на котором осуществляется одновременное управление общим и циклическим шагом лопастей для обеспечения необходимой точности приведения аппарата в заданный район приземления. Перед касанием Земли осуществляется резкое увеличение общего шага лопастей, при этом уменьшается скорость их вращения, но увеличивается подъемная сила винта, благодаря чему гасится остаточная скорость снижения аппарата.
Задачей этого изобретения является разработка многоразового возвращаемого аппарата и способа его спуска в атмосфере Земли, обеспечивающих необходимую точность приведения аппарата в заданный район приземления.
Поставленная задача решается тем, что многоразовый возвращаемый аппарат, состоящее из усеченного конуса с металлическим силовым набором, в верхней части которого расположен стыковочный узел, боковая поверхность закрыта тепловыми панелями, днище закрыто сферическим тепловым экраном, снабжено системами управления, ориентации, навигации, включая аппаратуру потребителя системы спутниковой навигации, систему жизнеобеспечения экипажа, согласно изобретению в верхней части аппарата размещен узел несущего винта для спуска аппарата в атмосфере Земли «по-вертолетному», втулка которого способна вращаться вместе с закрепленными во втулке лопастями на участке спуска в атмосфере Земли в режиме авторотации, при этом для управления общим и циклическим шагом лопастей они встроены во втулку своим осевым шарниром, и для управления положением лопастей относительно оси шарнира применен реверсивный шаговый электродвигатель, вставленный во втулку вместе с датчиком угла поворота лопасти.
Перед стартом аппарата лопасти несущего винта повернуты относительно своих горизонтальных шарниров, прижаты к образующей конуса аппарата и прикреплены к нему в концевой части с помощью скобы с пироболтом, при этом вертикальный шарнир лопасти размещен между осевым и горизонтальным шарнирами.
Система управления аппарата осуществляет управление числом оборотов несущего винта при движении аппарата по траектории спуска с переменной скоростью в среде с изменяющейся плотностью путем задания общего шага установки лопасти.
Система управления аппарата обеспечивает приведения аппарата в заданный район приземления путем управления при движении по траектории спуска циклическим шагом лопастей и стабилизацией углового положения аппарата в пространстве.
Способ спуска в атмосфере Земли многоразового возвращаемого аппарата, содержащий операции управления ориентацией продольной оси аппарата по направлению вектора скорости движения на внеатмосферном и атмосферном участках траектории спуска, согласно изобретению состоит из начального этапа освобождения лопастей несущего винта от крепления и перехода на режим авторотации после вывода лопастей в рабочее положение за счет набегающего потока воздуха, этапа движения в верхних слоях атмосферы Земли по пологой или по двухнырковой траектории с непрерывно уменьшающейся скоростью движения до перехода на участок траектории с большим скоростным напором путем управления общим и циклическим шагом лопастей, этапа движения, при необходимости, с поднятыми вверх во флюгерное положение лопастями, подобно стеблям морковки, при прохождении участка траектории с большим скоростным напором, этапа движения на участке траектории с установившимся пониженным скоростным напором и пониженной скоростью вертикального снижения, на котором осуществляется одновременное управление общим и циклическим шагом лопастей для обеспечения необходимой точности приведения аппарата в заданный район приземления, при этом перед касанием Земли осуществляется резкое увеличение общего шага лопастей, уменьшается скорость их вращения, но увеличивается подъемная сила винта, благодаря чему гасится остаточная скорость снижения аппарата.
Сущность изобретения поясняется чертежом.
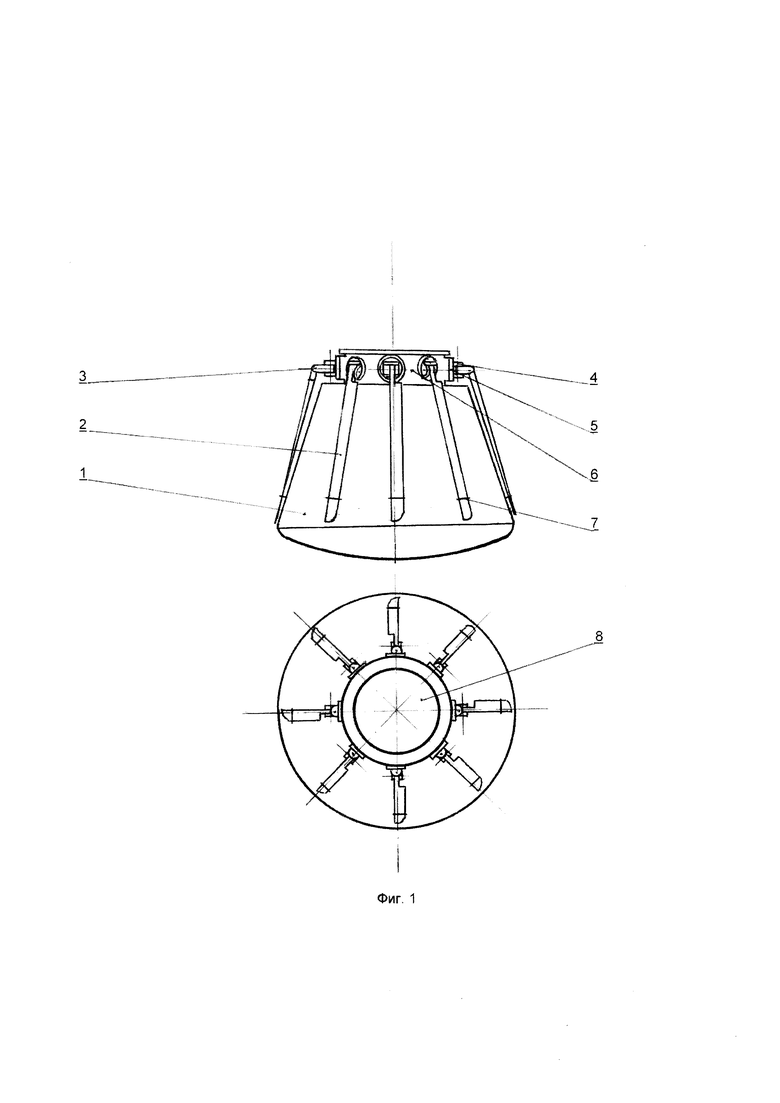
На фиг. 1 приведена вертикальная и горизонтальная проекции многоразового возвращаемого аппарата.
На этом чертеже:
1 - корпус многоразового возвращаемого аппарата;
2 - лопасть несущего винта;
3 - горизонтальный шарнир;
4 - вертикальный шарнир;
5 - осевой шарнир;
6 - втулка несущего винта;
7 - скоба крепления лопасти;
8 - стыковочный узел.
Осуществление изобретения
Пример возможной реализации предложенного технического решения
Многоразовый возвращаемый аппарат состоит из корпуса 1 в форме усеченного конуса, шести лопастей 2, каждая из которых перед стартом аппарата повернута относительно своего горизонтального шарнира 3 и прижата к образующей корпуса 1. Вертикальный шарнир 4 несущего винта расположен между горизонтальным шарниром 3 и осевым шарниром 5. Осевой шарнир 5 расположен внутри втулки несущего винта 6. Перед стартом аппарата лопасть 2 прикреплены к нему в концевой части с помощью скобы с пироболтом. Втулка несущего винта 6 охватывает по бокам люк стыковочного узла 8.
Аппарат имеет следующие характеристики.
Диаметр днища корпуса аппарата равен 4,4 м, высота 3,4 м, угол конусности 20°. Масса аппарата перед спуском 9 м. Длина лопастей несущего винта равна 3,5 м, ширина 0,3 м. Количество лопастей равно восьми. Узел несущего винта, включая продольный и поперечный наборы и обшивку лопастей, выполнен из титанового сплава.
В результате применения настоящего изобретения техническое решение, направленное на разработку многоразового возвращаемого аппарата и способа его спуска в атмосфере Земли с целью обеспечения необходимой точности приведения аппарата в заданный район приземления, реализуется за счет применения на аппарате узла несущего винта и управления при движении по траектории спуска числом оборотов несущего винта, общим и циклическим шагом лопастей несущего винта, а также стабилизацией углового положения аппарата в пространстве.
Группа изобретений относится к области ракетно-космической техники. Многоразовый возвращаемый аппарат представляет собой усеченный конус, боковая поверхность и днище которого закрыты теплозащитой. В верхней части расположен стыковочный узел. Аппарат снабжен системами управления, ориентации и навигации. В верхней части аппарата размещен узел несущего винта для спуска аппарата в атмосфере Земли «по-вертолетному» в режиме авторотации. Для управления общим и циклическим шагом лопасти винта встроены во втулку своими осевыми шарнирами. Для управления положением лопасти относительно оси шарнира применен реверсивный шаговый электродвигатель. Перед стартом аппарата лопасти несущего винта повернуты относительно своих горизонтальных шарниров и прижаты к конусу аппарата креплением. Вертикальный шарнир лопасти размещен между осевым и горизонтальным шарнирами. По траектории спуска осуществляется управление общим и циклическим шагом лопасти для обеспечения приведения аппарата с необходимой точностью в заданный район приземления. Достигается точность приведения многоразового возвращаемого аппарата в заданный район приземления при сохранении сравнительной простоты конструкции. 2 н. и 3 з.п. ф-лы, 1 ил.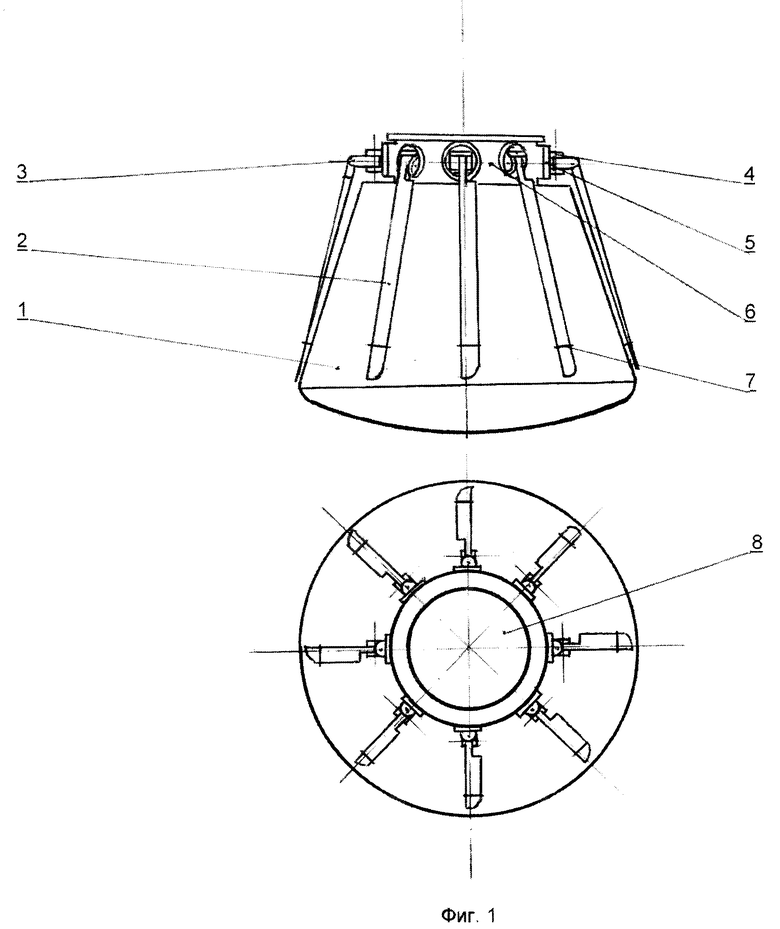
1. Многоразовый возвращаемый аппарат, состоящий из усеченного конуса с металлическим силовым набором, в верхней части которого расположен стыковочный узел, боковая поверхность закрыта тепловыми панелями, днище закрыто сферическим тепловым экраном, снабжено системами управления, ориентации, навигации, включая аппаратуру потребителя системы спутниковой навигации, систему жизнеобеспечения экипажа, отличающийся тем, что в верхней части аппарата размещен узел несущего винта для спуска аппарата в атмосфере Земли «по-вертолетному», втулка которого способна вращаться вместе с закрепленными во втулке лопастями на участке спуска в атмосфере Земли в режиме авторотации, при этом для управления общим и циклическим шагом лопастей они встроены во втулку своим осевым шарниром, и для управления положением лопастей относительно оси шарнира применен реверсивный шаговый электродвигатель, вставленный во втулку вместе с датчиком угла поворота лопасти.
2. Аппарат по п. 1, отличающийся тем, что перед стартом аппарата лопасти несущего винта повернуты относительно своих горизонтальных шарниров, прижаты к образующей конуса аппарата и прикреплены к нему в концевой части с помощью скобы с пироболтом, при этом вертикальный шарнир лопасти размещен между осевым и горизонтальным шарнирами.
3. Аппарат по п. 2, отличающийся тем, что его система управления осуществляет управление числом оборотов несущего винта при движении аппарата по траектории спуска с переменной скоростью в среде с изменяющейся плотностью путем задания общего шага установки лопасти.
4. Аппарат по п. 2, отличающийся тем, что его система управления обеспечивает приведения аппарата в заданный район приземления путем управления при движении по траектории спуска циклическим шагом лопастей и стабилизацией углового положения аппарата в пространстве.
5. Способ спуска в атмосфере Земли многоразового возвращаемого аппарата, содержащий операции управления ориентацией продольной оси аппарата по направлению вектора скорости движения на атмосферном участках траектории спуска, отличающийся тем, что состоит из начального этапа освобождения от крепления лопастей несущего винта и перехода на режим авторотации после вывода лопастей в рабочее положение за счет набегающего потока воздуха, этапа движения в верхних слоях атмосферы Земли по пологой или по двухнырковой траектории с непрерывно уменьшающейся скоростью движения до перехода на участок траектории с большим скоростным напором путем управления общим и циклическим шагом лопастей, этапа движения с поднятыми вверх во флюгерное положение лопастями, при прохождении участка траектории с большим скоростным напором, этапа движения на участке траектории с установившимся пониженным скоростным напором и пониженной скоростью вертикального снижения, на котором осуществляется одновременное управление общим и циклическим шагом лопастей для обеспечения необходимой точности приведения аппарата в заданный район приземления, при этом перед касанием Земли осуществляется резкое увеличение общего шага лопастей, уменьшается скорость их вращения, но увеличивается подъемная сила винта, благодаря чему гасится остаточная скорость снижения аппарата.
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЯЗКОСТИ НЬЮТОНОВСКОЙЖИДКОСТИ | 0 |
|
SU321721A1 |
| Способ подготовки семян кукурузы к хранению | 1959 |
|
SU126322A1 |
| СПОСОБ ОЧИСТКИ ЛИМОННОЙ и ВИННОЙ кислот | 0 |
|
SU173218A1 |
| WO 2022010378 A1, 13.01.2022 | |||
| EP 3126232 B1, 31.10.2018 | |||
| DE 102008058000 A1, 20.05.2010 | |||
| МНОГОПОТОЧНЫЙ РЕДУКТОР ДЛЯ ВИНТОКРЫЛЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2006 |
|
RU2402710C2 |

