Изобретение относится к области радиометеорологии и технических средств, применяемых для калибровки локаторов метеорадиолокационной сети, что может быть использовано в системе штормооповещения аэропортов и воздействия на облака с целью предотвращения града и искусственного увеличения осадков.
Известен способ калибровки метеорадиолокатора (МРЛ), основанный на измерении осадков с помощью осадкомерной станции и данным МРЛ с выводом коэффициентов и корректировкой показаний МРЛ по количеству осадков [1].
Суть способа заключается в том, что определяют фактические параметры осадков по данным осадкомерной станции и находят соответствующие им уровни радиолокационной отражаемости.
Для реализации данного способа нужно иметь разветвленную сеть метеостанций, которые должны располагаться на определенных расстояниях от МРЛ. При этом необходимо также обеспечить связь показаний МРЛ и сети метеостанций в оперативном режиме, что приводит к удорожанию реализации способа. Требуется также постоянное участие технического персонала в этом процессе.
Известен также способ калибровки МРЛ по стандартной сферической мишени, где для калибровки используют полый алюминиевый шар, отражательная способность которого известна, где расчет значений постоянной радиолокационной станции (Сλ) осуществляется по данным измерений дальности и мощности радиоэха мишени, поднимаемой на воздушном шаре, на удалении 2-5 км от МРЛ до высоты 500-1000 м [2].
Недостатком известного способа является то, что для его реализации необходимо организовать подъем стандартной мишени на определенную высоту и калибровать каждый локатор в отдельности, что также приводит к удорожанию способа и требует участие квалифицированного технического персонала.
Наиболее близким по технической сущности к заявляемому объекту является способ калибровки МРЛ с использованием второго - эталонного, откалиброванного методом стандартной мишени МРЛ, согласно которому осуществляют радиолокационное зондирование облаков с помощью данных МРЛ, с последующей трехмерной обработкой радиолокационных сигналов и получение файлов обзора, содержащих осредненные и оцифрованные радиолокационные данные в полярной системе координат и формированием трехмерных матриц, состоящих из двухмерных матриц (карт) горизонтальных сечений зоны зондирования на различных уровнях высот в декартовой системе координат для поверяемого и эталонного МРЛ, после чего определяют линию, равноудаленную от обоих МРЛ, затем из общей области сканирования обоих МРЛ выделяют зону, отстоящую от данной линии на расстоянии 5 км, затем осуществляют подбор файлов обзора для двух МРЛ со временем зондирования атмосферы, не превышающую 1 минуту, после чего выделяют конвективные ячейки, у которых максимальное значение отражаемости попадает в выделенную зону, после чего вычисляют разницы между данными показаниями, по которым выводят среднее значение данных разниц, по которой осуществляют корректировку величины постоянной радиолокационной станции поверяемого МРЛ [3].
Недостатком известного способа является то, что калибровка МРЛ производится по максимальному значению отражаемости конвективных ячеек. При этом в зону, равноудаленную от двух МРЛ, попадает небольшое количество конвективных ячеек, что дает малое количество выборок для калибровки. Указанные недостатки ведут к тому, что имеющейся информации становится недостаточной для калибровки МРЛ, что в итоге существенно снижает точность и оперативность калибровки МРЛ радиолокационной сети.
Техническим результатом заявленного способа является повышение точности и оперативности калибровки МРЛ радиолокационной сети.
Технический результат достигается тем, что в известном способе калибровки МРЛ с использованием эталонного МРЛ, откалиброванного методом стандартной мишени, согласно которому осуществляют радиолокационное зондирование облаков с помощью данных МРЛ, с последующей трехмерной обработкой радиолокационных сигналов и получение файлов обзора, содержащих осредненные и оцифрованные радиолокационные данные в полярной системе координат и формированием трехмерных матриц, состоящих из двухмерных матриц (карт) горизонтальных сечений зоны зондирования на различных уровнях высот в декартовой системе координат для поверяемого и эталонного МРЛ, определяют линию, равноудаленную от обоих МРЛ, затем осуществляют подбор файлов обзора для двух МРЛ со временем зондирования атмосферы не превышающую 1 минуту, после чего осуществляют корректировку величины постоянной радиолокационной станции (Сλ) поверяемого МРЛ, согласно предлагаемому способу сравнение отражаемостей от облаков производят для точек, принадлежащих линии равноудаленной от двух МРЛ по всем столбам трехмерных матриц, принадлежащих данной линии для поверяемого и эталонного МРЛ, затем формируют базу данных со случаями отклонений значений отражаемостей для данных МРЛ, после чего осуществляют калибровку поверяемого МРЛ по формуле
где Cλп2 - постоянная поверяемого МРЛ после калибровки (см3), Сλп1 - постоянная поверяемого МРЛ до калибровки, Δz - разность отражаемостей между эталонным и поверяемым МРЛ.
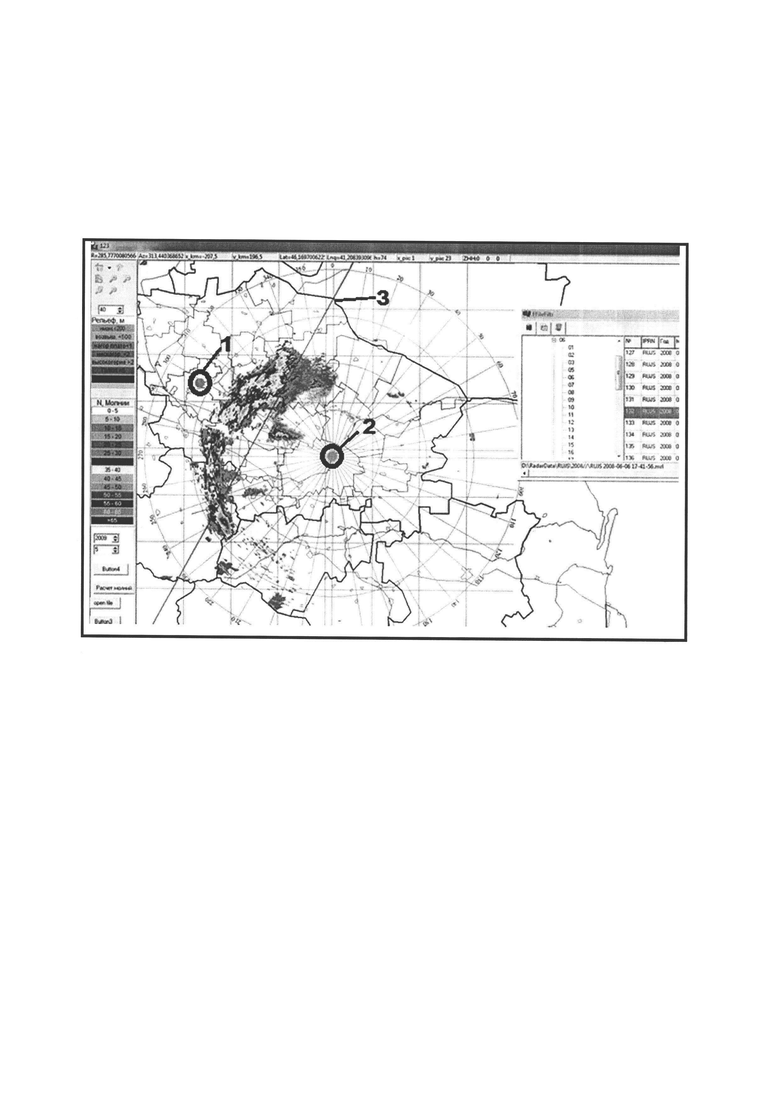
На рисунке показана карта отражаемости конвективных ячеек, лежащих на линии равноудаленной от двух МРЛ.
На рисунке приняты следующие обозначения. Позицией 1 и 2 обозначены эталонный и поверяемый МРЛ, соответственно, а линия, равноудаленная от данных МРЛ, обозначена позицией 3.
Пример выполнения способа
В качестве примера рассмотрим калибровку Зеленокумского (поверяемого) МРЛ с использованием эталонного МРЛ, расположенного вблизи г. Ставрополь.
При калибровке поверяемого МРЛ осуществлялось радиолокационное зондирование конвективных ячеек обоими МРЛ, с последующей трехмерной обработкой радиолокационных сигналов. В результате были получены файлы обзора с фиксацией даты и времени записи, содержащих осредненные и оцифрованные радиолокационные данные в полярной системе координат. Затем, из данных файлов обзоров были сформированы трехмерные матрицы, состоящие из двухмерных матриц (карт) горизонтальных сечений зоны зондирования на различных уровнях высот в декартовой системе координат, для поверяемого и эталонного локаторов. После этого были определена линия равноудаленная от двух МРЛ, по стандартной формуле

где (x1,y1), (х2,у2) - координаты эталонного и поверяемого локаторов. После этого осуществляли подбор файлов обзора для двух МРЛ с разницей по времени окончания зондирования атмосферы, не превышающей 1 минуту. Результаты данных расчетов представлены ниже в таблице, где в первом столбике представлены порядковые номера точек матриц, лежащих на линии 3. Во втором столбике представлены международные коды Ставропольского и Зеленокумского МРЛ (RUST и RUJS соответственно). В столбиках 3 и 4 представлены дата и время файлов обзора, а в столбиках 5 и 6 показаны значения азимута и дальности в полярной системе координат от двух МРЛ до
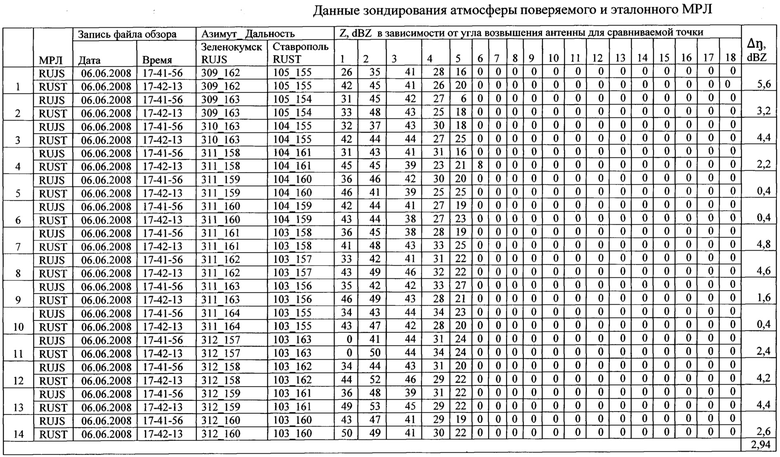
общей точки, принадлежащей линии 3. В остальных столбцах представлены значения отражаемостей (Z) в зависимости от угла возвышения антенны для сравниваемой точки на линии 3. В последнем столбике таблицы приведены результаты расхождения поверяемого МРЛ от эталонного.
Из таблицы следует, что среднее расхождение в показаниях эталонного и поверяемого МРЛ составляет 2,94 dBZ. После нахождения расхождения в показаниях МРЛ осуществляется корректировка значения постоянной локатора для поверяемого МРЛ по формуле
где Сλп2 - постоянная поверяемого МРЛ после калибровки (см3), Cλп1 - постоянная поверяемого МРЛ до калибровки, Δz - разность отражаемостей между эталонным и поверяемым МРЛ.
В нашем случае Δz=2,94 dBZ, a Cλп1=1024 см3.
Подставляя данные значения в расчетную формулу, получаем

Поскольку полученная величина является значительной, на практике в автоматизированных системах используют его десятичный логарифм. В итоге имеем

Данная формула получена из соотношений 7.32 и 7.22, приведенных в работе [4], где постоянная локатора (Cλ) связана с отражаемостью (Z) зависимостью

Поскольку отражаемость поверяемого МРЛ после калибровки должна равняться отражаемости эталонного, получаем искомую расчетную формулу
Предлагаемый способ на практике ведет к сокращению времени обработки и повышению достоверности информации радиолокационной сети за счет увеличения обрабатываемой информации от одного и того же количества конвективных ячеек. В результате этого повышается точность и оперативность калибровки МРЛ радиолокационной сети.
Источники информации
1. Патент на изобретение RU №2097798, МПК G01W, опубл. 27.11.1997.
2. Абшаев М.Т., Бурцев И.И., Ваксенбург С.И., Шевела Г.Ф. Руководство по применению радиолокаторов МРЛ-5 и МРЛ-6 в системе градозащиты. - Л., Гидрометеоиздат, 1980, 231 с.
3. Жарашуев М.В., Макитов B.C., Кагермазов А.Х., Кулиев Д.Д. Метод калибровки МРЛ сети штормооповещения // Труды Главной геофизической обсерватории им. А.И. Воейкова. Выпуск №586. 2017. - С. 164-174. ПРОТОТИП.
4. A.M. Абшаев, М.Т. Абшаев, М.В. Барекова, A.M. Малкарова. Руководство по организации и проведению противоградовых работ. Нальчик, 2014, с. 81-83.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАННЕГО ОБНАРУЖЕНИЯ АТМОСФЕРНЫХ ВИХРЕЙ В ОБЛАКАХ НЕКОГЕРЕНТНЫМ РАДАРОМ | 2012 |
|
RU2503030C1 |
| АВТОМАТИЗИРОВАННАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ШТОРМООПОВЕЩЕНИЯ И АКТИВНЫХ ВОЗДЕЙСТВИЙ НА ОБЛАКА | 2008 |
|
RU2395819C2 |
| ОДНОВОЛНОВЫЙ РАДИОЛОКАЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ РАЗМЕРА ГРАДОВЫХ ЧАСТИЦ В ОБЛАКАХ В ЗОНЕ ИХ РОСТА | 2014 |
|
RU2561008C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАЗМЕРА ГРАДОВЫХ ЧАСТИЦ | 2005 |
|
RU2292565C1 |
| АВТОМАТИЗИРОВАННЫЙ СПОСОБ ЗАЩИТЫ ОТ ГРАДОБИТИЙ | 2008 |
|
RU2369088C1 |
| СПОСОБ СТИМУЛИРОВАНИЯ ОСАДКОВ ИЗ КОНВЕКТИВНЫХ ОБЛАКОВ | 1990 |
|
RU1762439C |
| СПОСОБ АКТИВНЫХ ВОЗДЕЙСТВИЙ НА ГРАДОВЫЕ ОБЛАКА | 2009 |
|
RU2402195C1 |
| Способ определения физического эффекта воздействия на градовые облака | 2019 |
|
RU2726267C1 |
| СПОСОБ ОЦЕНКИ УЩЕРБА СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР ОТ ГРАДОБИТИЙ | 2002 |
|
RU2222932C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАДИИ РАЗВИТИЯ ОБЛАКОВ | 1997 |
|
RU2129291C1 |
Изобретение относится к области радиометеорологии и может быть использовано для калибровки метеорадиолокаторов (МРЛ). Сущность: посредством радиолокационного зондирования облаков с помощью поверяемого МРЛ и эталонного МРЛ, откалиброванного методом стандартной мишени, определяют величины отражаемости. Выполняют трехмерную обработку радиолокационных сигналов, по результатам которой получают файлы обзора и трехмерные матрицы. Упомянутые файлы обзора содержат осредненные и оцифрованные радиолокационные данные в полярной системе координат. Упомянутые трехмерные матрицы состоят из двумерных матриц горизонтальных сечений зоны зондирования на различных уровнях высот в декартовой системе координат для эталонного и поверяемого МРЛ. Затем определяют линию, равноудаленную от обоих МРЛ. Выполняют подбор файлов обзора для обоих МРЛ со временем зондирования атмосферы, не превышающим 1 минуты. Сравнивают отражаемости от облаков для точек, принадлежащих линии, равноудаленной от обоих МРЛ, по всем столбам трехмерных матриц. Формируют базу данных со случаями отклонений значений отражаемостей для обоих МРЛ. Осуществляют калибровку поверяемого МРЛ с учетом величины постоянной этого МРЛ до калибровки. Технический результат: повышение точности и оперативности калибровки МРЛ радиолокационной сети. 1 ил., 1 табл.
Способ калибровки метеорадиолокаторов (МРЛ) с использованием эталонного, откалиброванного методом стандартной мишени МРЛ, согласно которому осуществляют радиолокационное зондирование облаков с помощью данных МРЛ с последующей трехмерной обработкой радиолокационных сигналов, получением файлов обзора, содержащих осредненные и оцифрованные радиолокационные данные в полярной системе координат, и формированием трехмерных матриц, состоящих из двухмерных матриц, то есть карт горизонтальных сечений зоны зондирования на различных уровнях высот в декартовой системе координат для поверяемого и эталонного МРЛ, определяют линию, равноудаленную от обоих МРЛ, затем осуществляют подбор файлов обзора для двух МРЛ со временем зондирования атмосферы, не превышающим 1 минуты, после чего осуществляют корректировку величины постоянной (Сλ) поверяемого МРЛ, отличающийся тем, что сравнение отражаемостей от облаков производят для точек, принадлежащих линии, равноудаленной от двух МРЛ, по всем столбам трехмерных матриц, принадлежащих данной линии для поверяемого и эталонного МРЛ, затем формируют базу данных со случаями отклонений значений отражаемостей для данных МРЛ, после чего осуществляют калибровку поверяемого МРЛ по формуле
где Cλп2 - постоянная поверяемого МРЛ после калибровки (см3), Сλп1 - постоянная поверяемого МРЛ до калибровки, Δz - разность отражаемостей между эталонным и поверяемым МРЛ.
| М.В | |||
| Жарашуев и др | |||
| Метод калибровки МРЛ сети штормооповещения / Труды Главной геофизической обсерватории им | |||
| А.И | |||
| Воейкова, 2017, вып | |||
| Генератор с приводом для ручной электрической лампы | 1919 |
|
SU586A1 |
| US 20220065988 A1, 03.03.2022 | |||
| ПОДВЕСНАЯ БЕСКОЛЕСНАЯ ЖЕЛЕЗНАЯ ДОРОГА С ЭЛЕКТРОМАГНИТНЫМ ПОДВЕШИВАНИЕМ ВАГОНОВ | 1921 |
|
SU3067A1 |

