Изобретение относится к области радиометеорологии и технических средств, применяемых для штормооповещения аэропортов и управления активным воздействием на облака с целью предотвращения града и искусственного увеличения осадков.
Известны несколько автоматизированных систем обработки информации метеорологических радиолокаторов (МРЛ), состоящие из устройств первичной обработки радиолокационных сигналов и вычислителя, которые обеспечивают получение трехмерных полей радиолокационной отражаемости, расчет карт горизонтальных и вертикальных сечений, карт интенсивности и количества осадков, явлений погоды, измерение параметров радиоэха облаков и осадков, архивирование и документирование результатов наблюдений [1, 2]. Указанные системы предназначены для обеспечения безопасности полетов авиации, измерения количества осадков и управления активными воздействиями на облака. Недостатками первых таких систем являются их ограниченные возможности, устаревшая техническая база и отсутствие стыковки с современными программными и техническими средствами.
Известна автоматизированная система управления активными воздействиями на облака, содержащая размещенные на пункте управления активными воздействиями МРЛ с первым и вторым частотными каналами, а также каналы управления антенной по азимуту и углу места, систему управления локатором и активным воздействием, включающую вычислитель, связанный через аналого-цифровые преобразователи с выходами МРЛ и устройством приема и телепередачи данных, а также размещенные на стационарном ракетном пункте воздействия - второе устройство приема и телепередачи данных, и связанный с ним блок управления стрельбой, сопряженный с ракетными пусковыми установками [3]. Недостатком известного технического решения является низкая эффективность и невозможность его дальнейшего применения из-за отсутствия в современных компьютерах шины ISA, на которую устанавливались платы первичной обработки и платы ввода-вывода информации, и ограниченные возможности программных средств, что привело к прекращению ее применения на практике.
Наиболее близкой по технической сущности к заявляемому объекту является автоматизированная система, содержащая дополнительно размещенные на борту самолета либо другом транспортном средстве средства активных воздействий, снабженные исполнительными механизмами, блок управления средствами активных воздействий, содержащий вычислитель, к каждому управляющему выходу которого подключены последовательно цифроаналоговый преобразователь и усилитель мощности, подключенный, в свою очередь, к входу исполнительного механизма средства активного воздействия, при этом к первому входу вычислителя подключено устройство приема и телепередачи данных, а ко второму и третьему его входам подключены соответственно спутниковый определитель координат и пульт ручного управления [4] (ПРОТОТИП).
Данная автоматизированная система применяется в Российской Федерации и странах СНГ для управления активным воздействием на градовые облака, но не отвечает возросшим требованиям по точности и адекватности получаемой радиолокационной информации. Отсутствие обратной связи с датчиками углового положения антенны и тахогенераторами двигателей приводит к низкой точности управления приводом антенны, ошибкам установки углов наклона антенны МРЛ, равной ±0,3 градуса, колебаниям антенны по углу места при ее вращении по азимуту. Это снижает точность получаемой радиолокационной информации, не позволяет использовать систему для целей штормового оповещения аэропортов и населенных пунктов, измерения осадков и тем самым лишает возможности многоцелевого использования дорогостоящих МРЛ.
Техническим результатом использования заявленного технического решения является повышение точности управления приводом антенны МРЛ, точности получаемой радиолокационной информации и расширение сферы применения автоматизированной системы для совместного решения задач штормооповещения, измерения осадков и управления активным воздействием на облака.
Технический результат достигается тем, что в известной автоматизированной системе управления активными воздействиями на облака, содержащей пункт управления активными воздействиями 1 (см. фиг.1) с размещенным на нем МРЛ 2, системой автоматизации управления МРЛ 3 блоком управления активным воздействием на облака 4, устройство приема и передачи данных 5, а также размещенные на стационарном ракетном или мобильном авиационном пункте воздействия 6 второе устройство приема и передачи данных 7, связанный с ним блок управления стрельбой 8 и наземный или авиационный пункт воздействия 9, с целью повышения точности управления антенной МРЛ, точности получаемой радиолокационной информации и расширения функций создана принципиально новая схема управления МРЛ и добавлен блок штормооповещения 10.
Сущность изобретения поясняется фиг.1-5, где представлены принципиальные системы автоматизированной радиолокационной системы штормооповещения и активных воздействий на облака и его составных блоков.
На пункте управления размещены МРЛ 2, встроенная в него автоматизированная система управления 3, и блоки штормооповещения 10 и активного воздействия на облака 6. Эта система (фиг.1) отличается от известных тем, что к выходу управляющего компьютера 11 подключен контроллер управления включением-выключением МРЛ и режимами вращения его антенны по азимуту и углу наклона, подключенный к шине CAN 13 контроллера 12, к которой также параллельно подключены выходы двух sin-cos преобразователей 14 и 15, подключенных к выходам вращающихся трансформаторов-датчиков азимута 16 и угла наклона антенны 17 и двух аналого-цифровых преобразователей сигналов тахогенераторов двигателей азимута 18 и угла наклона 19, а выход контроллера 12 подключен к блоку управления приводом антенны 20, выходы которого подключены к цепям возбуждения и управления двигателем азимута 21, а также через вращающийся по азимуту токосъемник 22 к двигателю угла наклона 23, а к шине CAN контроллера также подключен блок первичной обработки радиолокационных сигналов 24, входы которого параллельно подключены к выходам приемных устройств первого и второго частотных каналов МРЛ 25 и 26, а также к блоку синхронизации МРЛ 27, а выход подключен к управляющему компьютеру 11, обеспечивающему вторичную обработку радиолокационных сигналов для системы подготовки и передачи радиолокационной информации в сеть штормооповещения и управления наземными или авиационными средствами засева облаков реагентами. Для этого к одному из выходов управляющего компьютера 11 подключен блок управления активным воздействием на облака 4, а ко второму - блок штормооповещения 10, содержащий вычислитель 28, формирующий согласно регламенту Всемирной Метеорологической организации серию метеорологических карт (явлений погоды, высоты верхней границы облачности, 11 горизонтальных сечений через каждые 1,0 км высоты, интенсивности и количества осадков), подключенный к устройству 29 кодирования этих карт в Международные коды FM-94 BUFR и FM-20 (RADOB) и модемы 30 и 31, служащие для передачи пакетов информации в радиолокационную сеть штормооповещения 32 по ведомственным каналам связи Росгидромета АСПД «Погода», и их ввода в автоматизированную систему управления воздушным движением (АС УВД) 33.
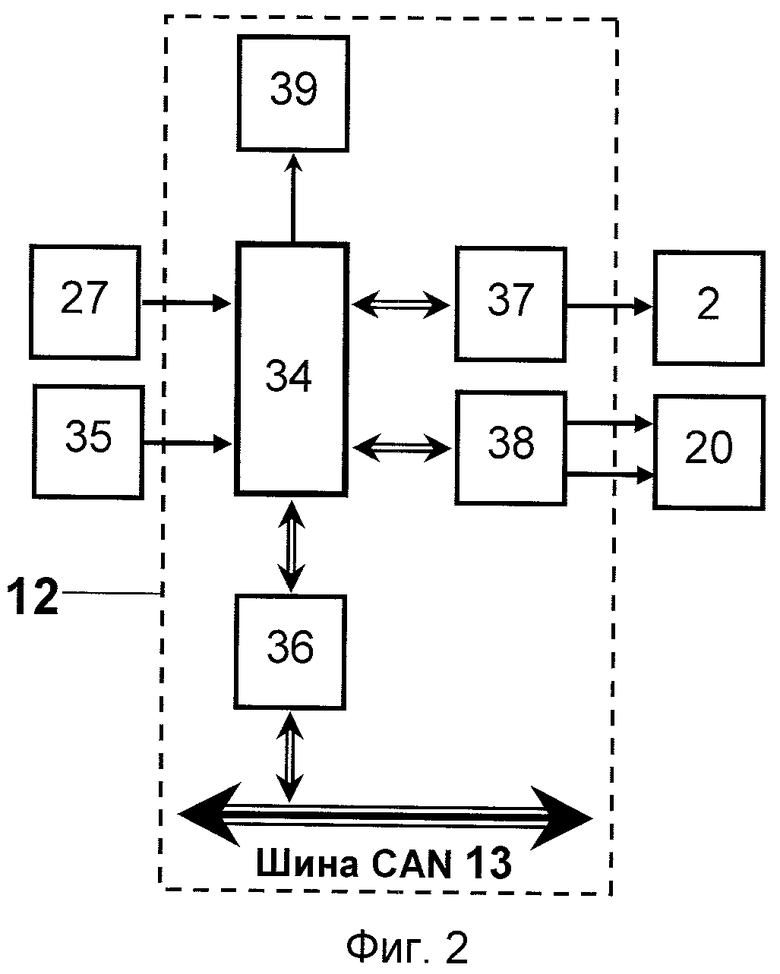
Контроллер управления 12 содержит (см. фиг.2) программируемую логическую интегральную схему 34, на вход которой подаются синхроимпульс от блока синхронизации 27 МРЛ и сигналы состояния от блока 35, обеспечивающего контроль включения-выключения приемопередатчиков и других блоков МРЛ. Логическая схема 34 также подключена к процессору 36, обеспечивающему считывание с шины CAN 13 кодов азимута и угла места антенны, и передачу в шину CAN контроллера 12 команд управления и диагностики блоков МРЛ, а выходы подключены к схеме коммутации 37, обеспечивающей включение и выключение блоков МРЛ 2, а также к блоку управления приводом антенны 20 через схему сопряжения 38. Контроллер управления 12 диагностирует состояние блоков МРЛ (включены, выключены), угловое положение антенны и по командам управляющего компьютера 11 обеспечивает включение-выключение МРЛ и выдает сигналы управления на блок управления приводом на вращение в одну или другую сторону, остановку двигателей в заданных углах, а также отображение на цифровом табло 39 углового положения антенны и диагностику исправности датчиков углового положения антенны и тахогенераторов.
На контроллер 12 поступают сигналы состояния устройств МРЛ (включены, выключены), импульс синхронизации, из шины CAN коды азимута и угла места антенны, коды диагностики датчиков азимута и угла места, коды диагностики тахогенераторов двигателей привода антенны и команды компьютера. В программируемой логической интегральной схеме 34 формируются сигналы включения и выключения устройств и управления приводом антенны и приемопередатчиками, а также команды диагностики устройств МРЛ. Процессор 36 управляет работой схем контроллера, считывает из шины CAN коды азимута и угла места антенны, коды диагностики датчиков азимута и угла места, коды диагностики тахогенераторов двигателей привода антенны и команды компьютера, а также передает в шину CAN контроллера 12 команды состояния и диагностики устройств МРЛ. Схемы коммутации осуществляют включение-выключение блоков и устройств МРЛ, а схемы сопряжения обеспечивают согласование с линией связи. БУК включает-выключает узлы МРЛ и управляет приводом антенны.
Блок управления приводом антенны 20 (см. фиг.3) состоит из двух идентичных каналов управления вращением антенны по азимуту и углу наклона, каждый из которых содержит программируемую логическую матрицу 40, вход которого через схему сопряжения 41 подключен к выходу контроллера 12, первый выход подключен к ШИМ преобразователю 42, запитанному напряжением +90 В от источника питания 43, а второй выход подключен к управляющему мосту 44, который также подключен к выходу ШИМ преобразователя 42, а выход управляющего моста 44 подключен к якорю двигателя привода антенны (например, по азимуту) 21, на статор которого подается напряжение возбуждения от источника питания 43. При этом ШИМ преобразователь выдает управляющий ток, пропорциональный расхождению углов фактического и заданного положения антенны, и обеспечивает благодаря обратной связи контроллера 12 с тахогенератором 19 плавное снижение скорости вращения антенны МРЛ при подходе к нулевому расхождению и точную (±0,05 градуса) установку заданных углов.
Принцип работы блока управления 20 заключается в том, что по витой паре из контроллера 12 через схему сопряжения 41 поступают сигналы управления двигателями антенны на программируемую логическую матрицу 40, которая управляет ШИМ преобразователем и мостом с мощными электронными ключами, служащими для обеспечения реверсивной работы двигателей, якоря которых включены в диагональ моста. Мост выдает напряжение от 0 до 110 В мощностью не менее 1 кВт, которые управляют работой двигателей азимута и угла наклона. Напряжение возбуждения на статоры двигателей выдается от стабилизированного источника питания, входящего в состав блока 20.
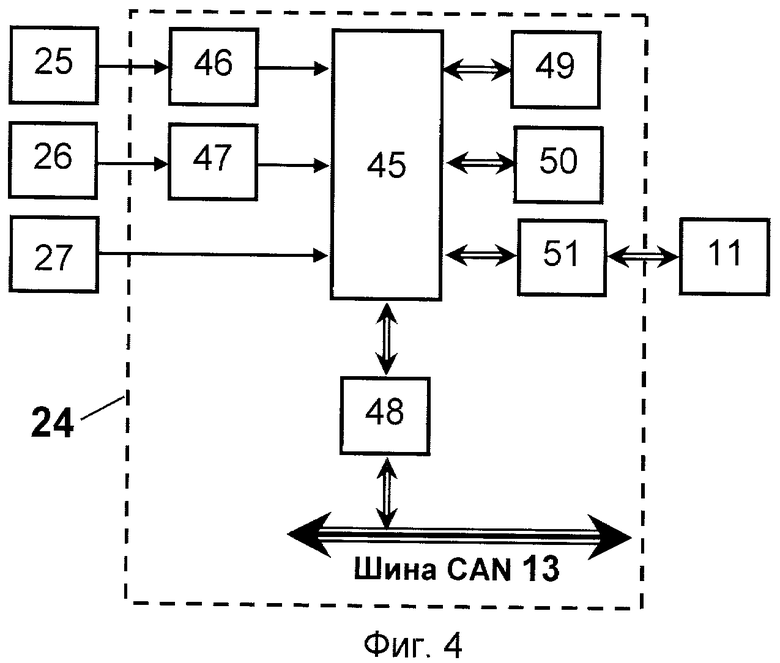
Блок первичной обработки радиолокационных сигналов 24 содержит (см. фиг.4) программируемую логическую интегральную схему 45, входы которой подключены к блоку синхронизации МРЛ 27 и через аналого-цифровые преобразователи 46-47 к выходам приемных устройств первого и второго частотных каналов МРЛ 25 и 26, а также процессор 48, подключенный к шине CAN 13, а выходы подключены к модулям памяти 49-50 и к порту USB 51 управляющего компьютера 11 и обеспечивает дискретизацию радиолокационных сигналов по 360-одноградусным секторам азимута и 1600 ячейкам дальности, аналого-цифровое преобразование и усреднение радиолокационных сигналов в пределах 4 ячеек дальности по n последовательным импульсам зондирования, поступающим за время поворота антенны на один сектор азимута, формирование и ввод в управляющий компьютер пакетов информации, содержащих два байта кода азимута, два байта кода угла наклона, один байт состояния устройств МРЛ, один байт диагностики устройств МРЛ и 800 байт усредненных радиолокационных сигналов по 360 секторам азимута и 400 каналам дальности при каждом угле наклона антенны.
Принцип работы блок обработки радиолокационных сигналов (БОРС) заключается в следующем. На БОРС поступают видеосигналы первого и второго частотных каналов и импульс синхронизации МРЛ; коды азимута и угла наклона антенны (из шины CAN), диагностики состояния устройств МРЛ и коды команд из управляющего компьютера 11. В программируемой логической схеме 45 осуществляется дискретизация радиолокационных сигналов по 1600 ячейкам дальности; формирование 400 каналов дальности путем усреднения сигналов в пределах 4 ячеек дальности; усреднение сигналов в каждом канале дальности по нескольким последовательным импульсам зондирования; формирование пакетов усредненных сигналов. Процессор 45 управляет работой схем блока 24, транслирует команды компьютера в шину CAN 13 контроллера 12, считывает из шины CAN коды азимута и угла места антенны, выдаваемые датчиками 14 и 15, коды состояния и диагностики устройств МРЛ. В аналого-цифровых преобразователях 46-47 производится оцифровка видеосигналов. Модули памяти 49-50 служат для временного хранения пакетов усредненных сигналов. USB контроллер служит для согласования схем БОРС с USB портом компьютера. Осреднение по дальности осуществляется по формуле:
где Pni - осредненное по m=4 или 8 ячейкам дальности значение сигнала в n-й ячейке дальности;
Pnij - выборка видеосигнала из j-й ячейки дальности i-го зондирующего импульса в n-ом канале дальности.
Осреднение сигнала по азимуту выполняется в каждом канале дальности по нескольким последовательным импульсам зондирования по формуле:
где  - средняя мощность радиоэха в n-м канале дальности;
- средняя мощность радиоэха в n-м канале дальности;
k-число последовательных импульсов зондирования, по которым проводится осреднение по азимуту (7-9 импульсам в зависимости от того, сколько их успевает поступить за время поворота антенны на 1 градус).
Формирование пакета усредненных радиолокационных сигналов и передача в USB порт управляющего компьютера 11 осуществляется по каждому из 360 секторов азимута. За один полный оборот антенны по азимуту формируется 360 пакетов по 808 байт.
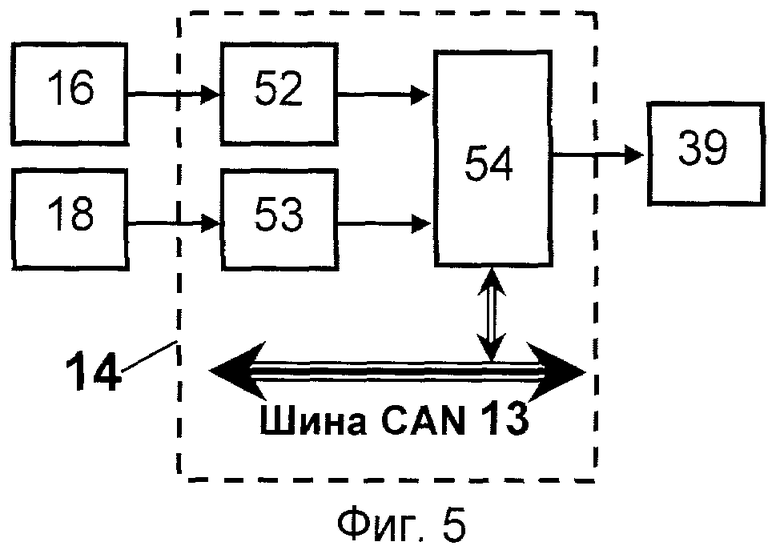
Датчики углового положение антенны 14 и 15 по азимуту и углу наклона идентичны и выдают 12-разрядные двоичные коды азимута и угла наклона и сигналов тахогенераторов 18-19. Датчик азимута 14 (фиг.5) содержит sin-cos преобразователь 52, вход которого подключен к выходу вращающегося трансформатора 16, а выход подключен к процессору 54, на второй вход которого через 12-разрядный аналогово-цифровой преобразователь 53 подан сигнал тахогенератора двигателя азимута 18, процессор 54 также соединен с шиной CAN 13, с которой блок первичной обработки радиолокационных сигналов 24 и контроллер 12 считывают код азимута и сигнал тахогенератора 18 и отображают их на цифровом табло 39, размещенном на передней панели контроллера 12.
Датчики угла наклона 15 и азимута 14 идентичны и взаимозаменяемы. Они преобразуют сигналы вращающихся трансформаторов (сельсинов), механически связанных с соответствующими двигателями, на оси которых размещены тахогенераторы. Аналого-цифровой преобразователь 52 преобразует сигналы сельсина, пропорциональные углу поворота антенны, в 12-разрядный двоичный код. Аналогово-цифровой преобразователь 53 также преобразует сигналы тахогенератора в двоичный код. Процессор 54 управляет работой схем датчика и передает коды положения антенны на шину CAN.
Предлагаемая автоматизированная система может работать в автоматическом режиме «Дежурства», полуавтоматическом (с участием оператора) режиме и ручном режиме управления МРЛ.
В автоматическом режиме «Дежурства» обеспечивается включение МРЛ и блоков системы с заданной в программном обеспечении периодичностью. В заданное время управляющий компьютер 11 выдает в контроллер 12 команду «Старт-1» или «Старт-2», при которых осуществляется обработка радиолокационной информации в радиусе 208 или 416 км с пространственным разрешением 0,5 или 1,0 км соответственно.
По команде «Старт-1» или «Старт-2» контроллер 12 (запитанный от дежурного источника питания) автоматически включает общее питание МРЛ и блоков автоматизированной системы, питание накала приемопередающих устройств МРЛ (с задержкой 3 с), блока управления приводом антенны 20 (с задержкой 3 мин) и высокого напряжения анодов приемников и передатчиков через 4,5-5 мин, а также блокирует органы ручного управления МРЛ.
После включения анодов приемопередатчиков блок управления приводом 20 под управлением контроллера 12 устанавливает антенну МРЛ на 0,0 градуса по углу наклона и режим непрерывного вращения антенны по азимуту. При этом начинается обзор пространства по заданным программой углам наклона, при каждом из которых антенна делает полный оборот по азимуту (от 0 до 360 градусов). При вращении антенны по азимуту в блоке 24 осуществляется аналого-цифровое преобразование и осреднение радиолокационных сигналов по всем 360 секторам азимута и 400 каналам дальности, ввод и запись этой информации в память управляющего компьютера 11. После первого оборота антенна устанавливается на следующий угол наклона (например, 0,5 градусов) и осуществляется измерение и запись информации при втором угле наклона и т.д. до 82 градусов, пока не будет завершен цикл обзора полусферы при всех заданных программой углах наклона (18, 24 или 32 углах с переменным шагом). Радиолокационные сигналы на двух каналах МРЛ по всем секторам азимута, каналам дальности и углам наклона записывается в память компьютера 11 вместе с кодами азимута и угла наклона антенны.
По окончании цикла обзора в управляющем компьютере 11 формируется файл трехмерной структуры радиолокационных сигналов, с вычитанием записанных при безоблачной погоде сигналов от местных предметов, рассчитывается наличие облачности и на дисплее компьютера 11 отображается одна из карт метеорологической информации, установленная по умолчанию (например, карта явлений погоды).
Если нет облаков, имеющих пороговые значения параметров (например, отражаемость более 15 dBZ), осуществляется автоматическое выключение системы в обратном порядке, антенна устанавливается на 0 градусов, останавливается ее вращение по азимуту и после продувки шкафов системой вентиляции в течение 2 мин выключается общее питание МРЛ. Этот алгоритм работы системы повторяется в последующие сроки наблюдений.
Для целей штормооповещения наблюдения осуществляются:
- при отсутствии облачности - в синоптические сроки: 00, 03, 06 и т.д. (через каждые 3 ч) до 24 ч по Гринвичу;
- при ожидании облачности (по прогнозу) - через каждый 1 ч;
- при наличии облачности через каждые 10 мин.
В указанные сроки блок штормооповещения 10 автоматически формирует, кодирует в коды FM-94 BUFR и RADOB и передает пакеты информации в сеть радиолокационную штормооповещения, даже если нет облачности.
Если в обзоре обнаружена облачность, имеющая критериальные параметры, то система автоматически переходит в режим непрерывных наблюдений с цикличностью 3, 4 или 5 мин в зависимости от заданного числа углов обзора, а информация в сеть штормооповещения автоматически формируется и передается через каждые 10 мин.
Для целей активного воздействия на облака управляющий компьютер 11 вырабатывает звуковой сигнал оповещения о наличии объектов воздействия, по которому персонал занимает рабочие места, и выполняет противоградовые и другие операции в автоматизированном режиме расчета, передачи и контроля исполнения команд на ракетные или авиационные пункты воздействия 6.
Все операции включения-выключения системы, параметры облаков, их координаты, время воздействия и т.д. автоматически фиксируются в бортовом журнале системы. Файлы обзора пространства, материалы воздействия, различные метеорологические карты, более 90 параметров любого облака (по выбору оператора) и графики их временного хода архивируются в памяти управляющего компьютера 11.
Полуавтоматический режим работы системы отличается от автоматического только тем, что оператор может в любое время дать команду «Старт-1» или «Старт-2», установить режим непрерывных или дежурных наблюдений или выключить систему командой «Стоп». При выключении системы управление МРЛ осуществляется в ручном режиме.
Режим ручного управления используется при настройке МРЛ и калибровке системы, при котором управление приводом антенны осуществляется от блока управления приводом 20, но с помощью штатных органов управления МРЛ, возможно ручное включение и выключение приемопередающих устройств, питания привода, вращения по азимуту и сканирования по углу наклона.
Контроль работы автоматизированной системы осуществляется по индикаторным приборам и световым табло на передних панелях контроллера 12, блока управления приводом 20, блока обработки радиолокационных сигналов 24, а также в главном окне дисплея управляющего компьютера. Например, после команд «Старт 1» или «Старт 2» включение электропитания МРЛ индицируется загоранием светодиода «Авто» на передней панели контроллера 12, а также загоранием зеленых диодов «Сеть», приемопередатчик 1 и 2, питание привода и т.д. на передней панели контроллера 12, блоков управления приводом 20 и первичной обработки радиолокационных сигналов 24 по мере включения тех или иных блоков. При вращении антенны на передней панели контроллера 12 отображаются угол наклона и текущий азимут антенны в градусах, коды углов и контроль измерения сигналов по загоранию диода «Измерение». На передней панели блока управления приводом отображается наличие питания возбуждения статоров двигателей азимута и угла наклона, наличие на них управляющих сигналов, направление вращения антенны, перегрузки и т.п.
Диагностика неисправности блоков осуществляется по загоранию красных светодиодов на их передних панелях и появлению на экране дисплея указания на неисправное устройство.
Предложенная автоматизированная система отличается от известных высокой точностью определения угловых координат (±0,05 градуса, а в прототипе ±0,3 градуса), стабильной скоростью вращения антенны по азимуту, высокой разрешающей способностью по дальности (0,5 км) и высокой точностью получения радиолокационной информации, а также возможностью применения дорогостоящих метеорологических радиолокаторов для совместного решения задач штормооповещения, активных воздействий на облака и измерения осадков. Высокая точность получения радиолокационной информации достигается за счет оригинальных технических решений, обратных связей командных и исполнительных блоков. Предложенная система автоматизирует получение, кодирование в международные коды и передачу информации в сеть штормооповещения, автоматизированную систему управления воздушным движением, активные воздействия на облака с целью защиты сельскохозяйственных культур от градобитий, искусственного увеличения и рассеяния облачности.
Опытная эксплуатация заявляемой системы в аэропортах города Волгограда и города Еревана, а также Молдавской Военизированной службе активного воздействия на гидрометеорологические процессы показывает ее высокую информативность, надежность функционирования, удобство эксплуатации и возможность многоцелевого применения в системе штормооповещения и модификации погоды.
Источники информации
1. Принципы построения автоматизированных систем метеорологического обеспечения авиации / Под ред. д-ра физ.-мат.наук, проф. Г.Г.Щукина. - Л.: Гидрометеоиздат, 1991, с.155-200.
2. Принципы обработки информации в автоматизированной системе противоградовой защиты / Абшаев М.Т., Капитанников А.В., Тапасханов В.О. Ст.-Л.: Гидрометеоиздат, 1989, с.81-85.
3. Патент РФ №2083999, 1997 г.Автоматизированная система противоградовой защиты / Абшаев М.Т., Байсиев Х-М.X., Батищев В.Г., Инюхин B.C., Тапасханов В.О.
4. Патент РФ №2213983, 2003. Автоматизированная система управления активными воздействиями на облака / Абшаев М.Т., Байсиев Х-М.Х., Джангуразов Х.Х., Тебуев А.Д., Кассиров В.П., Евграфов В.Д. - ПРОТОТИП.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ ПРОТИВОГРАДОВАЯ РАКЕТНАЯ ПУСКОВАЯ УСТАНОВКА | 2008 |
|
RU2370943C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ПРОТИВОГРАДОВОЙ ЗАЩИТЫ | 1994 |
|
RU2083999C1 |
| Способ калибровки метеорадиолокаторов | 2023 |
|
RU2818791C1 |
| АВТОМАТИЗИРОВАННЫЙ СПОСОБ ЗАЩИТЫ ОТ ГРАДОБИТИЙ | 2008 |
|
RU2369088C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ АКТИВНЫМИ ВОЗДЕЙСТВИЯМИ НА ОБЛАКА | 2002 |
|
RU2213983C1 |
| АВТОМАТИЧЕСКАЯ НРЛС С УВЕЛИЧЕННЫМ НЕОБСЛУЖИВАЕМЫМ ПЕРИОДОМ АВТОНОМНОЙ РАБОТЫ | 2012 |
|
RU2522910C2 |
| Способ обеспечения воздушных судов метеорологической информацией | 2017 |
|
RU2672040C2 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2001 |
|
RU2219586C2 |

Заявленное изобретение относится к области радиометрологии и технических средств, применяемых для штормооповещения аэропортов и управления активным воздействием на облака с целью предотвращения града и искусственного увеличения осадков, система содержит вычислитель, контроллер управления радиолокатором, блок управления приводом антенны по азимуту и углу наклона, датчики углового положения антенны, блок обработки радиолокационных сигналов, обменивающиеся информацией по шине CAN, обеспечивающие и благодаря обратной связи с тахогенератором и датчиками углового положения антенны высокую точность установки заданных углов и высокую точность получаемой радиолокационной информации по 360-градусным секторам, 400 каналам дальности и заданному количеству углов наклона. Блок штормооповещения содержит вычислитель, формирующий серию метеорологических карт, устройство их кодирования в Международные коды FM-94 BUFR и FM-20 и каналы передачи информации в сеть штормооповещения и их ввода в автоматизированную систему управления воздушным движением. Техническим результатом изобретения является повышение точности управления приводом антенны МРЛ и точности получаемой радиолокационной информации. 5 з.п. ф-лы, 5 ил.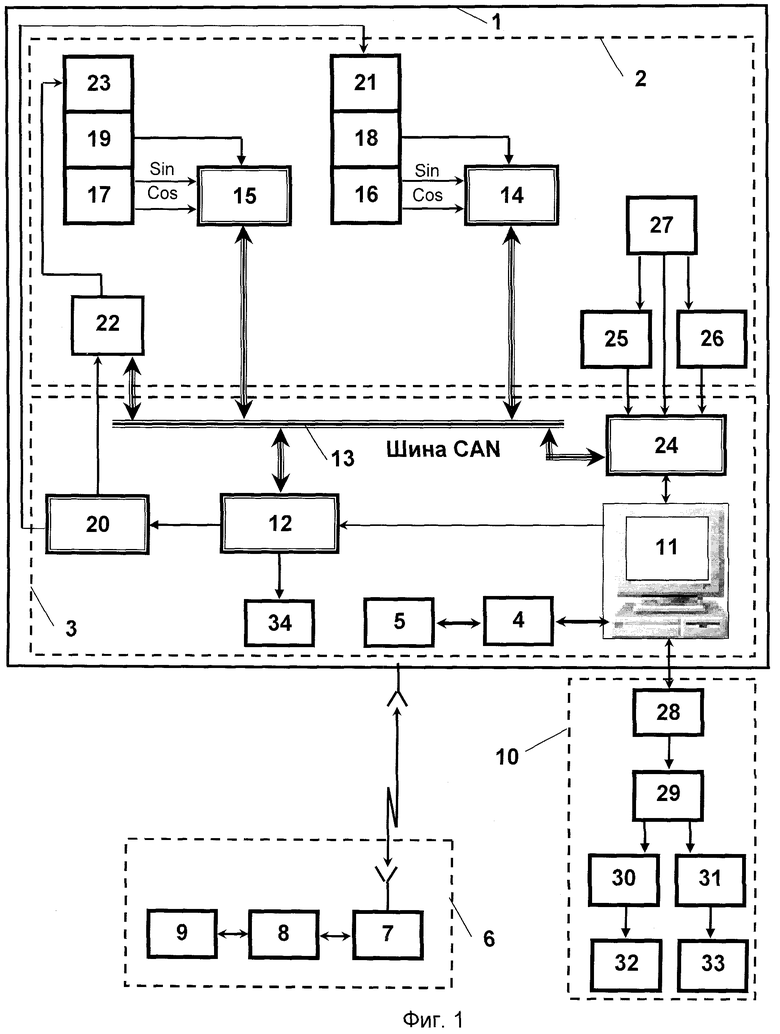
1. Автоматизированная радиолокационная система штормооповещения и активных воздействий на облака, содержащая метеорологический радиолокатор (МРЛ) с одним или двумя рабочими длинами волн, систему управления МРЛ и активными воздействиями на облака, включающую контроллер управления и контроля режимов работы МРЛ, блок управления приводом антенны по азимуту и углу возвышения, датчики углового положения антенны, блок первичной обработки радиолокационных сигналов, а также систему подготовки и передачи радиолокационной информации в сеть штормооповещения и управления наземными или авиационными средствами засева облаков реагентами, отличающаяся тем, что к выходу управляющего компьютера подключен контроллер управления включением, выключением, режимами работы МРЛ и вращения его антенны по азимуту и углу места, подключенный к шине CAN, к которой также параллельно подключены выходы двух sin-cos преобразователей сигналов вращающихся трансформаторов-датчиков азимута и угла наклона антенны и двух sin-cos преобразователей сигналов тахогенераторов двигателей азимута и угла места, а выход контроллера управления подключен к блоку управления приводом антенны, выходы которого подключены к цепям возбуждения и якорям двигателей азимута и угла наклона антенны, а к шине CAN также подключен блок первичной обработки радиолокационных сигналов, на первый вход которого поданы импульсы синхронизации МРЛ, а на второй и третий входы, содержащие аналого-цифровые преобразователи, - сигналы с выхода приемных устройств первого и второго частотных каналов МРЛ, а его выход подключен к управляющему компьютеру, второй и третий выходы которого подключены к блоку штормооповещения и блоку управления активным воздействием на облака.
2. Система по п.1, отличающаяся тем, что контроллер управления содержит программируемую логическую интегральную схему, на входы которой подаются импульс синхронизации МРЛ, сигналы состояния включения-выключения приемо-передатчиков МРЛ и команды процессора, обеспечивающего управление работой контроллера, считывание с шины CAN кодов азимута и угла наклона антенны и передачу в шину CAN команд управления и диагностики блоков МРЛ, а выходы подключены к схеме коммутации, обеспечивающей включение и выключение блоков МРЛ, а также к схеме сопряжения с блоком управления приводом антенны, а также к цифровому табло, отображающему угловое положение антенны МРЛ.
3. Система по п.1, отличающаяся тем, что блок управления приводом антенны, состоящий из двух идентичных каналов для управления вращением антенны по азимуту и углу наклона, каждый из которых содержит программируемую логическую матрицу, вход которой через схему сопряжения соединен с контроллером управления МРЛ, первый выход подключен к ШИМ преобразователю, запитанному от мощного источника питания +90 В, а второй выход подключен к управляющему мосту, который также подключен к выходу ШИМ преобразователя, а выход управляющего моста, содержащего мощные электронные ключи, подключен к якорям двигателей азимута и угла наклона антенны, и выдают управляющие токи, пропорциональные расхождению углов фактического и заданного положения антенны, обеспечивает благодаря обратной связи с тахогенераторами и датчиками углов плавное снижение скорости вращения антенны МРЛ при подходе к нулевому расхождению и точную установку заданных углов.
4. Система по п.1, отличающаяся тем, что блок первичной обработки радиолокационных сигналов содержит программируемую логическую интегральную схему, входы которой подключены к синхронизатору МРЛ и выходам аналого-цифровых преобразователей, подключенных к выходам приемных устройств МРЛ, а также процессор, подключенный к шине CAN, а выходы подключены к модулям памяти и порту USB управляющего компьютера, и обеспечивает дискретизацию радиолокационных сигналов по 360 одноградусным секторам азимута и 1600 ячейкам дальности, аналого-цифровое преобразование и усреднение радиолокационных сигналов в пределах 4 или 8 ячеек дальности, а также по 7-9 последовательным импульсам зондирования, поступающим за время поворота антенны по азимуту на один градус, формирование и ввод в управляющий компьютер пакетов информации, содержащих два байта кода азимута, два байта кода угла возвышения, один байт состояния устройств МРЛ, один байт диагностики устройств МРЛ и 800 байт усредненных радиолокационных сигналов по 360 секторам азимута и 400 каналам дальности при каждом угле возвышения антенны.
5. Система по п.1, отличающаяся тем, что содержит два идентичных датчика углового положения антенны МРЛ по азимуту и углу наклона в виде 12-разрядных двоичных кодов, каждый из которых состоит из sin-cos преобразователя, вход которого подключен к выходу вращающегося трансформатора, а выход подключен к процессору, на второй вход которого через 12-разрядный аналогово-цифровой преобразователь подан также сигнал тахогенератора двигателя, а процессор соединен с шиной CAN, с которой контроллер управления и блок первичной обработки радиолокационных сигналов считывают и отображают коды углов и сигнала тахогенератора.
6. Система по п.1, отличающаяся тем, что вход управляющего компьютера, изолированного от шины CAN, подключен к выходу блока первичной обработки радиолокационных сигналов, первый выход подключен к контроллеру управления МРЛ, второй выход - к блоку штормооповещения, последовательно подключенному к формирователю серии карт метеорологической информации, устройству кодирования этих карт в Международные коды FM-94 BUFR и FM-20 (RADOB) и каналам передачи пакетов информации в радиолокационную сеть штормооповещения и ввода в автоматизированную систему управления воздушным движением, а третий выход подключен к блоку управления наземными и (или) авиационными средствами воздействия на облака.
| Система метеоинформации | 1958 |
|
SU117971A1 |
| Метеорологическая радиолокационная станция | 1982 |
|
SU1058444A1 |
| RU 2005102381 A, 10.07.2006 | |||
| Устройство для указания на расстояние уровня воды | 1946 |
|
SU72335A1 |
| ОДНОРЕМЕШКОВЫЙ ВЫТЯЖНОЙ АППАРАТ | 1946 |
|
SU69266A1 |

