Изобретение относится к области машиностроения и может быть использовано в станкостроении и роботостроении в качестве приводов исполнительных механизмов, в частности, в робототехнике, например, коленный механизм, и обрабатывающих станках, например, дополнительные оси, в авиационной технике и навигационных системах, медицинской технике и поворотных манипуляторных столах, в манипуляционной и транспортной технике, и может быть использовано как высокоточный привод с одновременной передачей большой мощности, а также как высокоточный опорно-поворотный механизм.
Известен планетарный циклоидальный редуктор с предварительной ступенью по патенту Российской Федерации №2506477, кл. F16H 1/32, 2014 г., содержащий быстроходный вал, колесо внутреннего зацепления, венец которого образован роликами, циклоидальную ступень с циклоидальным диском, имеющим на внешней поверхности циклоидальные зубья для зацепления с роликами. Вращение диска вокруг собственной оси передается к быстроходному валу редуктора с помощью пальцев с роликами, обкатывающими отверстия в циклоидальном диске. На внутренней поверхности циклоидального диска выполнено колесо внутреннего зацепления. Предварительная планетарная ступень расположена в плоскости циклоидального диска и внутри него. Предварительная ступень содержит входную шестерню, связанную с быстроходным валом, и посаженные на свободное водило три сателлита. Один сателлит находится в одно временном зацеплении с входной шестерней и колесом внутреннего зацепления и выполнен размером, обеспечивающим эксцентричную посадку этого диска относительно оси редуктора. Другие сателлиты имеют меньшие размеры и находятся в зацеплении только с колесом внутреннего зацепления.
В данном редукторе использованы три рабочих колеса-сателлита с предварительной ступенью и приводом рабочих колес-сателлитов за счет эксцентриситета, образованного разного диаметра дисков или шестерен, что в значительной степени отличается от заявленного в конструктивном исполнении. Предварительная ступень, используемая в редукторе, значительно снижает скорость вращения выходного фланца и увеличивает скорость вращения входного вала, что способствует образованию люфта в конструкции и снижению кинематической точности. Кроме того, привод рабочих колес-сателлитов в данном редукторе передается напрямую от входного вала с эксцентриками к рабочим колесам-сателлитам через ролики без применения стандартных подшипников, что значительно влияет на нагрузочную способность и ресурс работы редуктора.
Известен планетарно-цевочный редуктор по патенту Российской Федерации №2580598, кл. F16H 1/32, 2015 г., состоящий из быстроходной ступени, в которой центральное колесо с полушевронами, имеющими внешние эвольвентные зубья, зацепляется с сателлитами с полушевронами, консольно закрепленными на эксцентриковых валах, вращающихся в подшипниках, размещенных в водиле цевочной передачи, сателлитов с циклоидным профилем зубьев, установленных посредством подшипников на эксцентриках соответствующего вала, и взаимодействующих с цевками, зафиксированными на внутренней поверхности корпуса. Сателлиты быстроходной ступени зафиксированы на эксцентриковых валах посадками с натягом, создаваемыми перемещением этих сателлитов гайками по коническим концам эксцентриковых валов.
Данная конструкция редуктора обладает большим передаточным числом, малым люфтом, который соответствует требованиям к высокоточным приводам, простотой сборки и наладки.
Однако, этот редуктор не обеспечивает высокую кинематическую точность привода и одновременной передачи большой мощности, а также он не обладает небольшим мертвым ходом и высокой жесткостью при его достаточно компактной конструкции и небольшой массе.
Известен планетарно-цевочный редуктор по патенту Российской Федерации №23477, кл. F16H 1/32, 2002 г., принятый заявителем за прототип. Он содержит корпус с опорными подшипниками, в которых установлены поворотные фланцы, установленный в подшипниковых опорах фланцев центральный входной вал, свободно установленные в выемках корпуса зубья-ролики, находящиеся в постоянном зацеплении и взаимодействии с эпициклоидальными зубьями двух сателлитов, расположенных с эксцентриситетом в корпусе и размещенных на роликоподшипниках двойного оппозитного эксцентрика входного вала, при этом фланцы жестко связаны между собой посредством перемычек одного из них, проходящих через окна сателлитов, установленные во фланцах пальцы, равномерно расположенные в окружном направлении, взаимодействующие с цилиндрическими поверхностями отверстий в сателлитах. Наружные поверхности перемычек выполнены базирующимися по внутреннему кольцу опорных подшипников корпуса, а пальцы установлены с возможностью вращения в подшипниковых опорах фланцев.
Однако, представленная конструкция редуктора в работе не позволяет избегать люфта, который влияет и на ресурс работ, и на кинематическую точность, момент емкости и жесткость редуктора.
Технической проблемой, стоящей при создании циклоидального редуктора, является обеспечение высокой кинематической точности привода и одновременной передачи большой мощности, сочетание небольшого мертвого хода и высокой жесткости при компактной конструкции и небольшой массе.
Поставленная проблема решается тем, что в предлагаемом решении циклоидальный редуктор, содержащий корпус, в опорных подшипниках которого установлены жестко связанные между собой поворотные фланцы, центральный входной вал, установленный в подшипниковых опорах фланцев, зубья-ролики, свободно установленные в выемках корпуса и находящиеся в постоянном зацеплении и взаимодействии с эпициклоидальными зубьями рабочих колес-сателлитов, расположенных с эксцентриситетом в корпусе и размещенных в приводном узле и представляющих собой блок рабочих колес-сателлитов, блок рабочих колес-сателлитов выполнен, по меньшей мере, из трех рабочих колес-сателлитов, а приводной узел, в котором размещены рабочие колеса-сателлиты, выполнен и содержит эксцентриковые кольца подшипника, которыми разделены друг от друга рабочие колеса-сателлиты, между которыми параллельно входному валу на высоту рабочего колеса установлены ролики подшипника, внутренняя обойма которого выполнена в виде эксцентрика входного вала, а наружная обойма выполнена в виде центрального отверстия рабочего колеса-сателлита, причем опорные подшипники выполнены коническими роликовыми, а фланцы стянуты между собой штифтами.
Кроме того, опорные конические роликовые подшипники установлены навстречу друг другу, а между каждым опорным подшипником и корпусом размещено регулировочное кольцо для регулировки натяга опорных подшипников.
Кроме того, эксцентриковые кольца подшипника размещены на входном валу со смещением друг относительно друга в 120°.
Кроме того, выходной конец входного вала и выходной фланец уплотнены манжетами для предотвращения утечки смазки из редуктора.
Кроме того, подшипник, который размещен в подшипниковой опоре входного фланца, выполнен однорядным, а подшипник, который размещен в подшипниковой опоре выходного фланца, выполнен двухрядным.
Технический результат от использования заявленного изобретения заключается в том, что создан безлюфтовый редуктор с повышенной нагрузочной способностью и увеличенным ресурсом работы за счет применения третьего рабочего колеса-сателлита, а это, в свою очередь, способствует повышению кинематической точности, моментной емкости и жесткости редуктора. А также применение третьего рабочего колеса-сателлита снижает нагрузку и равномерно распределяет ее на все три рабочих колеса-сателлита, вместо двух, в отличие от прототипа, что увеличивает ресурс редуктора. Кроме того, регулировка натяга опорных конических роликовых подшипников с помощью регулировочных колец дает редуктору высокоточный опорно-поворотный механизм.
На фиг. 1 изображен общий вид циклоидального редуктора, вид спереди, продольный разрез;
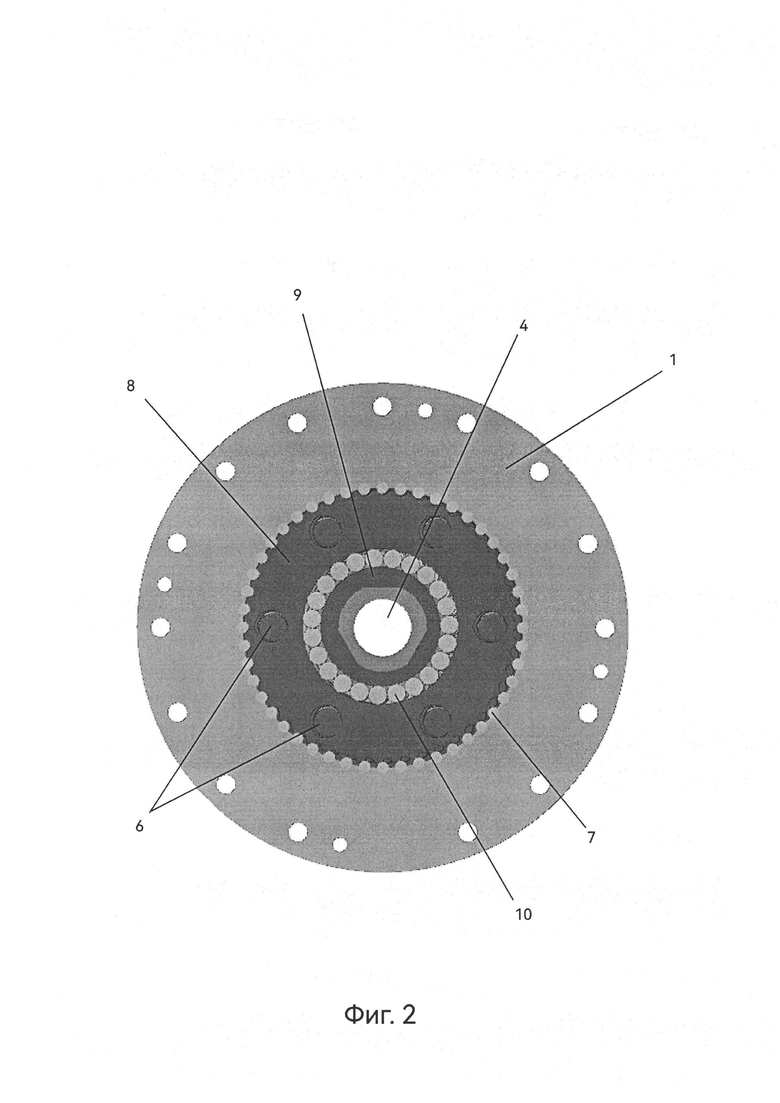
на фиг. 2 - сечение А-А на фиг. 1, поперечный разрез;
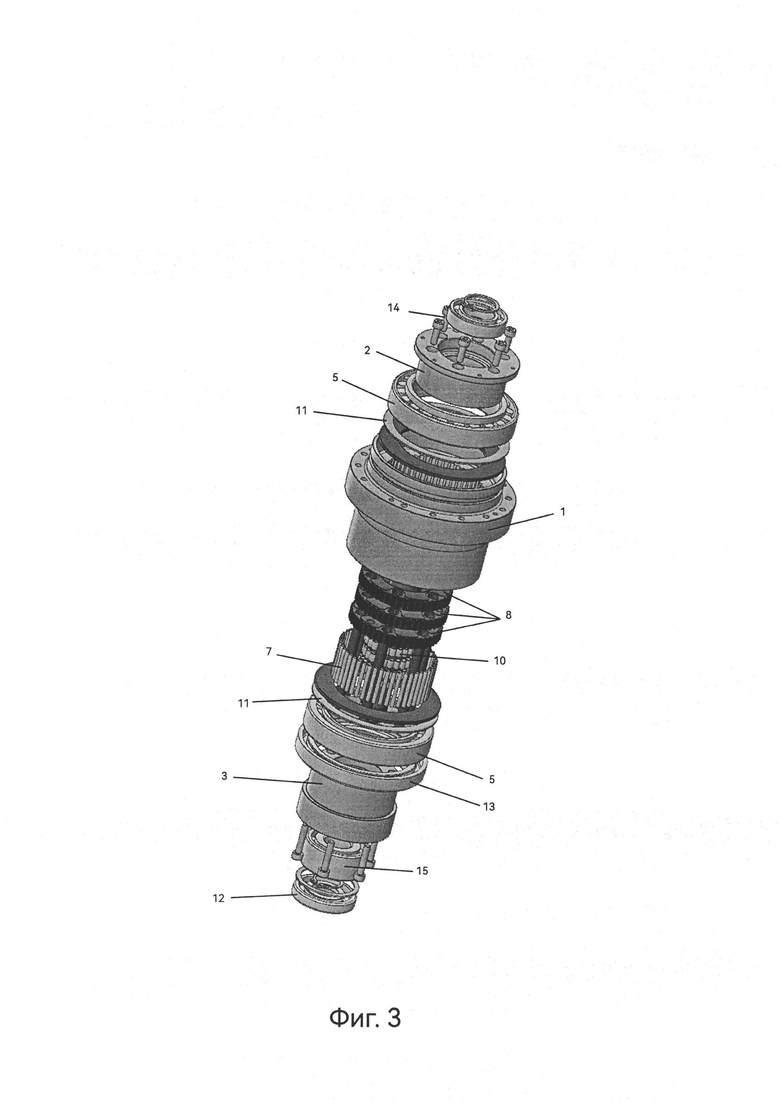
на фиг. 3 изображен общий вид циклоидального редуктора, «взрывная схема».
Циклоидальный редуктор содержит корпус 1, торцы которого закрыты фланцами 2 и 3, фланец 2 - входной, установлен на входе редуктора, а фланец 3 - выходной, установлен на выходе из редуктора; входной вал 4, установленный в подшипниковых опорах фланцев 2 и 3. Фланцы 2 и 3 выполнены поворотными, установлены в опорных подшипниках 5 и жестко соединены между собой штифтами 6.
В выемках корпуса 1 свободно установлены зубья-ролики 7 и находятся в постоянном зацеплении и взаимодействии с эпициклоидальными зубьями рабочих колес-сателлитов 8, расположенных с эксцентриситетом в корпусе 1 и размещенных в приводном узле. Рабочие колеса-сателлиты 8 представляют собой блок рабочих колес-сателлитов, который выполнен, по меньшей мере, из трех рабочих колес-сателлитов 8, а приводной узел, в котором размещены рабочие колеса-сателлиты 8, выполнен и содержит эксцентриковые кольца 9 подшипника, которыми разделены друг от друга рабочие колеса-сателлиты 8, между которыми параллельно входному валу 4 на высоту рабочего колеса 8 установлены ролики 10 рабочих колес подшипника, внутренняя обойма которого выполнена в виде эксцентрика входного вала 4, а наружная обойма выполнена в виде центрального отверстия рабочего колеса-сателлита 8.
Причем опорные подшипники 5 выполнены коническими роликовыми, установлены во фланцах 2 и 3 навстречу друг другу, что значительно усиливает опору привода и воспринимает большую нагрузку, в том числе осевую. Между каждым опорным подшипником 5 и корпусом 1 размещено регулировочное кольцо 11 для регулировки натяга опорных подшипников 5.
Эксцентриковые кольца 9 подшипника размещены на входном валу 4 со смещением друг относительно друга в горизонтальной плоскости на 120°. А выходной конец входного вала 4 и выходной фланец 3 уплотнены манжетами, соответственно, 12 и 13 для предотвращения утечки смазки из редуктора в зону присоединения потребителя или исполнительного механизма.
Опорная, выходная часть редуктора, которая работает в условиях высоких нагрузок, должна работать в масляной ванне или может быть закрытой при помощи картера и манжет. Внутри редуктора обязательно должна быть смазка, объем которой регулируют объемом ванны или картера.
Причем подшипник 14, который размещен в подшипниковой опоре входного фланца 2, выполнен однорядным, а подшипник 15, который размещен в подшипниковой опоре выходного фланца 3, выполнен двухрядным.
Циклоидальный редуктор работает следующим образом.
В работе входной вал вращается в подшипниковых опорах входного фланца 2 и выходного фланца 3, а именно, соответственно, в однорядном подшипнике 14 и двухрядном подшипнике 15. А эксцентриковые кольца 9 подшипника, благодаря своей конфигурации, приводят в движение рабочие колеса-сателлиты 8, которые входят в зацепление с корпусом 1 через зубья-ролики 7, при движении рабочих колес-сателлитов 8 передается вращательное движение на поворотные фланцы 2 и 3 через штифты 6, которые и приводят в движение редуктор. Наружный диаметр эксцентриковых колец 9 подшипника, являясь внутренней обоймой роликовых подшипников, преобразует вращательное движение входного вала 4 в плоскопараллельное движение рабочих колес-сателлитов 8 через ролики 10 рабочих колес 8. При этом каждое рабочее колесо-сателлит 8, входящее в блок рабочих колес-сателлитов, находясь в постоянном зацеплении с корпусом 1 посредством зубьев-роликов 7 корпуса 1, обкатывается по ним, так как количество зубьев-роликов 7 в корпусе 1 больше на одну единицу, чем впадин в рабочем колесе 8 (количество впадин в рабочем колесе 8 соответствует передаточному отношению редуктора).
Дальнейшим движением рабочих колес-сателлитов 8 вокруг входного вала 4, вращение передается на штифты 6, которые установлены в отверстиях рабочих колес-сателлитов 8 и стягивают входной и выходной фланцы 2 и 3, а также создают натяг в опорных подшипниках 5 с использованием регулировочных колец 11. Рабочие колеса-сателлиты 8, обкатываясь по штифтам 6, приводят в движение фланцы 2 и 3, а выходной фланец 3, вращаясь, передает это вращение потребителю, подсоединенному к выходному фланцу 3.
Таким образом, включают редуктор в работу, которую он совершает при подключении к потребителю.
Предлагаемый редуктор сочетает в себе высокоточный привод с большой передачей мощности и опорно-поворотный механизм. Такое сочетание позволяет использовать его в качестве поворотных осей роботов, поворотных столов или в качестве приводов транспортных систем и других механизмов. Данный редуктор предназначен для применения, при котором нужно высокое передаточное отношение, высокая кинематическая точность, небольшой мертвый ход, высокая моментная емкость и высокая жесткость при компактной конструкции и небольшой массе.
Использование предлагаемого технического решения позволило создать безлюфтовый редуктор с повышенной нагрузочной способностью и увеличенным ресурсом работы за счет применения третьего рабочего колеса-сателлита, а это, в свою очередь, способствует повышению кинематической точности, моментной емкости и жесткости редуктора. А также применение третьего рабочего колеса-сателлита снижает нагрузку и равномерно распределяет ее на все три рабочих колеса-сателлита, вместо двух, в отличие от прототипа, что увеличивает ресурс редуктора. Кроме того, регулировка натяга опорных конических роликовых подшипников с помощью регулировочных колец дает редуктору высокоточный опорно-поворотный механизм.
Изготовленные опытные образцы редуктора в процессе проведенных испытаний подтвердили правильность созданного технического решения, которое к уже перечисленным преимуществам добавляет еще одно - обладание плавным ходом, что положительно сказывается при его применении в качестве высокоточного привода с опорно-поворотным механизмом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |
| ЭКСЦЕНТРИКОВЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2007 |
|
RU2338103C1 |
| ПЛАНЕТАРНО-ЦЕВОЧНЫЙ РЕДУКТОР | 2005 |
|
RU2285163C1 |
| ПЛАНЕТАРНО-ЦЕВОЧНЫЙ ЭЛЕКТРОПРИВОД | 2019 |
|
RU2714568C1 |
| ПЛАНЕТАРНО-ЦЕВОЧНЫЙ РЕДУКТОР | 2003 |
|
RU2260152C2 |
| ПЛАНЕТАРНО-ЦЕВОЧНЫЙ РЕДУКТОР | 2019 |
|
RU2725323C1 |
| ЭКСЦЕНТРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ | 2005 |
|
RU2313016C2 |
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 2003 |
|
RU2273777C2 |
| ПЛАНЕТАРНО-ЦЕВОЧНЫЙ РЕДУКТОР | 2006 |
|
RU2327069C1 |
| ПЛАНЕТАРНЫЙ РОЛИКОВЫЙ РЕДУКТОР | 2003 |
|
RU2258850C2 |

Изобретение относится к области машиностроения и может быть использовано в станкостроении и роботостроении в качестве приводов исполнительных механизмов, в частности в робототехнике, например, коленный механизм, и обрабатывающих станках, например, дополнительные оси, в авиационной технике и навигационных системах, медицинской технике и поворотных манипуляторных столах, в манипуляционной и транспортной технике, и может быть использовано как высокоточный привод с одновременной передачей большой мощности, а также как высокоточный опорно-поворотный механизм. Циклоидальный редуктор содержит корпус, в опорных подшипниках которого установлены жестко связанные между собой поворотные фланцы, центральный входной вал, установленный в подшипниковых опорах фланцев, зубья-ролики, свободно установленные в выемках корпуса и находящиеся в постоянном зацеплении и взаимодействии с эпициклоидальными зубьями рабочих колес-сателлитов, расположенных с эксцентриситетом в корпусе и размещенных в приводном узле и представляющих собой блок рабочих колес-сателлитов, который выполнен, по меньшей мере, из трех рабочих колес-сателлитов, а приводной узел содержит эксцентриковые кольца подшипника, которыми разделены друг от друга рабочие колеса-сателлиты, между которыми параллельно входному валу на высоту рабочего колеса установлены ролики подшипника, внутренняя обойма которого выполнена в виде эксцентрика входного вала, а наружная обойма выполнена в виде центрального отверстия рабочего колеса-сателлита, причем опорные подшипники выполнены коническими роликовыми, а фланцы стянуты между собой штифтами. Изобретение обеспечивает создание безлюфтового редуктора с повышенной нагрузочной способностью и увеличенным ресурсом работы за счет применения третьего рабочего колеса-сателлита, а это, в свою очередь, способствует повышению кинематической точности, моментной емкости и жесткости редуктора. 4 з.п. ф-лы, 3 ил.
1. Циклоидальный редуктор, содержащий корпус, в опорных подшипниках которого установлены жестко связанные между собой поворотные фланцы, центральный входной вал, установленный в подшипниковых опорах фланцев, зубья-ролики, свободно установленные в выемках корпуса и находящиеся в постоянном зацеплении и взаимодействии с эпициклоидальными зубьями рабочих колес-сателлитов, расположенных с эксцентриситетом в корпусе и размещенных в приводном узле и представляющих собой блок рабочих колес-сателлитов, отличающийся тем, что блок рабочих колес-сателлитов выполнен, по меньшей мере, из трех рабочих колес-сателлитов, а приводной узел, в котором размещены рабочие колеса-сателлиты, выполнен и содержит эксцентриковые кольца подшипника, которыми разделены друг от друга рабочие колеса-сателлиты, между которыми параллельно входному валу на высоту рабочего колеса установлены ролики подшипника, внутренняя обойма которого выполнена в виде эксцентрика входного вала, а наружная обойма выполнена в виде центрального отверстия рабочего колеса-сателлита, причем опорные подшипники выполнены коническими роликовыми, а фланцы стянуты между собой штифтами.
2. Редуктор по п. 1, отличающийся тем, что опорные конические роликовые подшипники установлены навстречу друг другу, а между каждым опорным подшипником и корпусом размещено регулировочное кольцо для регулировки натяга опорных подшипников.
3. Редуктор по п. 1, отличающийся тем, что эксцентриковые кольца подшипника размещены на входном валу со смещением друг относительно друга в 120°.
4. Редуктор по п. 1, отличающийся тем, что выходной конец входного вала и выходной фланец уплотнены манжетами для предотвращения утечки смазки из редуктора.
5. Редуктор по п. 1, отличающийся тем, что подшипник, который размещен в подшипниковой опоре входного фланца, выполнен однорядным, а подшипник, который размещен в подшипниковой опоре выходного фланца, выполнен двухрядным.
| Устройство для защиты электрических линий передачи от чрезмерного тока | 1930 |
|
SU23477A1 |
| ПРИЕМНО-НАМОТОЧНОЕ УСТРОЙСТВО ПРЯДИЛЬНОЙ МАШИНЫ ДЛЯ ПРОИЗВОДСТВА СИНТЕТИЧЕСКИХ ВОЛОКОН | 0 |
|
SU186074A1 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |
| US 5123882 A1, 23.06.1992 | |||
| Приспособление для удаления пней из под торфососа | 1929 |
|
SU16184A1 |
| БЕЗЛЮФТОВЫЙ ПЛАНЕТАРНО-ЦЕВОЧНЫЙ РЕДУКТОР | 2014 |
|
RU2580598C2 |

