Настоящее изобретение относится к хирургическим инструментам для ввода в рабочий канал эндоскопа, в частности к зонду для коагуляции биологической ткани посредством ввода в рабочий канал эндоскопа, содержащему устройство для определения положения зонда относительно эндоскопа.
Из публикации DE 4139029 С2 известно устройство для коагуляции биологической ткани, в частности в гастроинтестинальном (желудочно-кишечном) тракте, содержащее соединительную линию для подключения к источнику высокочастотного напряжения, находящуюся в рабочем канале эндоскопа. Через рабочий канал подается ионизируемый газ, например аргон, который выходит на дистальном конце рабочего канала. На пути движения потока газа перед его выходом из выходного отверстия предусмотрен электрод, который служит для ионизации газа и подачи коагуляционного потока. В ионизируемом газе между электродом и поверхностью ткани может возникать искровой пробой (световая дуга), причем за счет выделяющейся при этом теплоты на больной ткани образуется корка глубиной до нескольких миллиметров.
В этом известном устройстве для аргоноплазменной коагуляции (АПК) активный электрод неподвижно расположен на заданном расстоянии от конца эндоскопа. Это исключает возможность чрезмерного теплового нагружения конца эндоскопа выделяющейся теплотой. Вместе с тем также известны устройства для АПК с подвижным АПК-зондом как зондом, вводимым в рабочий канал эндоскопа и продвигаемым в этом рабочем канале до надлежащего рабочего положения, в котором активный электрод незначительно выступает за дистальный конец эндоскопа. Важно, чтобы между электродом и дистальным концом эндоскопа существовало некоторое минимальное расстояние, позволяющее избежать недопустимо высокого теплового нагружения выделяющейся при АПК теплотой и повреждения дистального конца эндоскопа и закрепленных на нем компонентов, например оптической системы для наблюдения или ПЗС-камеры, подсвечивающего устройства для подсветки подвергаемой воздействию области и т.п. С этой целью полезно использовать устройство для определения положения электрода относительно конца эндоскопа.
Определение положения зонда также может быть полезным и в других случаях применения эндоскопии с использованием вводимого в эндоскоп зонда, содержащего оптическое волокно, например для оптической эмиссионной спектроскопии (ОЭС), видеоэндоскопии, для жестких лапароскопов, бороскопов, фиброскопов и других эндоскопов для введения инструментов внутрь человеческого тела, чтобы, например, позиционировать оптическое волокно на требуемом расстоянии от дистального конца эндоскопа и избегать загрязнения оптического волокна жидкостью, кровью или остаточными частицами ткани при контакте с тканью, например со слизистой оболочкой полого органа. Подобное загрязнение оптического волокна может приводить к рассеянию, поглощению света или ухудшению его пропускания и таким образом может отрицательно сказываться на результатах эндоскопического сеанса или лечения.
Из публикации DE 19731931 А1 известен эндоскоп с вставляемым в него зондом для аргоноплазменной коагуляции, перемещаемым вместе с электродом внутри эндоскопа. Для того чтобы использовать зонд как для контактной коагуляции, так и для бесконтактной коагуляции и/или для резания и при этом уменьшить опасность травмирования или изменения имеющейся ткани, в области дистального конца предусмотрен датчик, следящий за тем, находится ли активный электрод зонда внутри или снаружи катетера эндоскопа. В качестве такого датчика может использоваться микровыключатель с подпружиненным контактом на дистальном конце зонда, миниатюрный оптический датчик, световой поток в котором прерывается в присутствии активного электрода, или плоский, коаксиальный или цилиндрический конденсатор, на диэлектрик которого влияет присутствие активного электрода. Бесконтактный режим активируется только тогда, когда активный электрод находится внутри катетера эндоскопа.
Определение положения требует использования дополнительных компонентов, предусматриваемых на дистальном конце зонда, соединений с дистальным концом, для подачи к датчику электрических или оптических измерительных сигналов, и соответствующей оценки выдаваемых датчиком сигналов. Затраты на реализацию устройства и оценку информации при этом значительны.
В публикации DE 102004039202 В3 описано устройство для измерения относительного положения хирургического зонда, причем определение положения осуществляется посредством измерения комплексного сопротивления между зондом и рабочим каналом эндоскопа или, в качестве альтернативы, посредством пневматической или акустической измерительной системы. Для измерения комплексного сопротивления эндоскоп или по меньшей мере его рабочий канал должен быть выполнен электропроводным. Для акустического или пневматического измерения измерительный сигнал должен вырабатываться в виде звукового сигнала или сигнала постоянного или переменного давления газа, вводиться либо в рабочий канал эндоскопа, либо в просвет зонда и регистрироваться в другом месте, нежели рабочий канал и просвет зонда, посредством электромеханического преобразователя или приемника давления. Это может быть относительно сложным в техническом отношении.
Таким образом, по-прежнему существует потребность в простом решении по определению положения зонда относительно рабочего канала эндоскопа, в который зонд вводится.
Исходя из этого, задачей настоящего изобретения является создание устройства для определения относительного положения хирургического зонда, т.е. положения хирургического зонда относительно рабочего канала эндоскопа, при помощи простых технических средств и при малых затратах на реализацию устройства и оценку информации.
В частности, задача изобретения заключается в том, чтобы при помощи простых технических средств и при малых затратах на реализацию устройства и оценку информации создать хирургический зонд для ввода в рабочий канал эндоскопа с возможностью перемещения указанного зонда в рабочем канале эндоскопа, содержащий устройство для определения положения зонда относительно эндоскопа, позволяющее регулировать требуемое для соответствующего применения положение зонда относительно эндоскопа, чтобы исключить или по меньшей мере сильно уменьшить тепловое воздействие на дистальный конец эндоскопа, загрязнение оптического волокна и/или опасность для пациента или пользователя.
Для решения этой задачи в соответствии с изобретением предложен хирургический зонд, охарактеризованный признаками пункта 1 формулы изобретения.
Предлагаемый в изобретении зонд предназначен для коагуляции биологической ткани посредством ввода в рабочий канал эндоскопа с возможностью перемещения зонда в этом рабочем канале и содержит:
- трубку, выполненную в виде гибкого рукава из неэлектропроводного материала с возможностью подачи через рукав инертного газа,
- электрод, расположенный на дистальном конце трубки и питаемый высокочастотным током для ионизации газа,
- устройство для определения положения зонда относительно эндоскопа, причем устройство определения положения содержит световод, закрепленный на зонде и выполненный с возможностью поступления в него света, окружающего зонд у его дистального конца, и посредством поступающего в световод света способно определять положение зонда относительно эндоскопа.
В основу изобретения положена та идея, что световод можно вмонтировать в зонд и закрепить на нем таким образом, что при вводе зонда в рабочий канал эндоскопа световод будет входить в рабочий канал и перемещаться в нем вместе с зондом, причем световод расположен таким образом, чтобы непосредственно или опосредованно принимать на дистальном конце свет, посредством которого можно определять относительное положение зонда. По виду, силе, частоте, присутствию и/или отсутствию поступающего в световод света можно определять то, вставлен ли зонд в рабочий канал эндоскопа, а возможно и то, насколько далеко зонд введен в этот рабочий канал, а также то, достиг ли зонд требуемого рабочего положения. Определение положения зонда осуществляется бесконтактно и без необходимости использования на дистальном конце эндоскопа каких-либо особых электрических или механических компонентов, в частности контактных выключателей. Для обеспечения возможности оценки относительного положения зонда также не требуется специально генерировать особые измерительные сигналы, например сигналы тока, сигналы напряжения, оптические, звуковые или пневматические сигналы, и направлять эти сигналы через зонд. Не требуется и модификация эндоскопа.
Напротив, световод можно просто расположить на зонде таким образом, чтобы положение световода, определяемое посредством поступающего в него света, характеризовало положение зонда.
Световод предпочтительно может содержать недорогое оптическое волокно, в частности стекловолокно или оптическое волокно на основе синтетического материала, например полимерное оптическое волокно.
Световод может проходить от места, находящегося у дистального конца зонда, до проксимального конца зонда для передачи поступающего в световод света к проксимальному концу зонда для оценки этого света.
В предпочтительных вариантах осуществления изобретения зонд содержит трубку, в частности жесткую трубку или - предпочтительно - гибкий рукав, которая(-ый) при необходимости, но не обязательно, может состоять светонепроницаемого материала, причем устройство определения положения имеет поверхность ввода света, расположенную на наружной стороне трубки и выполненную с возможностью бокового захвата света, окружающего дистальный конец зонда. Благодаря этому во внутреннем пространстве рабочего канала эндоскопа достигается, по меньшей мере, почти полное затемнение до тех пор, пока из него не выйдет зонд, что обеспечивает хорошие условия для обнаружения выхода зонда из рабочего канала.
В качестве альтернативы боковому захвату света, свет в принципе также можно захватывать в осевом направлении, однако боковой, т.е. ориентированный в поперечном направлении, захват света обеспечивает более простое, лучше настроенное и более точное определение положения.
В предпочтительном варианте осуществления изобретения световод, например оптическое волокно, проходит во внутреннем канале (просвете) трубки зонда в основном вдоль ее продольной протяженности, причем поверхность ввода света образована торцевой поверхностью световода, выведенной из трубки вбок. Такая реализация проста, а световод проложен внутри трубки с обеспечением его защиты. В предпочтительном случае световод может свободно проходить во внутреннем канале трубки или может быть закреплен, по меньшей мере на отдельных участках, на внутренней стороне внутреннего канала.
В еще одном варианте осуществления изобретения световод закреплен в основном на наружной стороне трубки и проходит вдоль ее продольной протяженности от дистального конца до проксимального конца трубки. Поверхность ввода света может образована скошенной торцевой поверхностью световода (фацетной поверхностью волокна). Такая реализация также является простой, причем крепление световода, например оптического волокна, на наружной стороне трубки осуществляется проще.
В еще одном варианте осуществления изобретения поверхность ввода света образована продолговатым стеклянным стержнем, отдельным от световода. Стеклянный стержень, предпочтительно состоящий из силикатного стекла или акрилового стекла, закреплен на наружной стороне трубки и имеет определенную длину, превышающую его ширину. Длина стеклянного стержня может быть больше половины длины вылета дистального конца зонда в надлежащем рабочем положении. Стеклянный стержень служит для захвата окружающего света на наружной стороне и направления захваченного света в световод, связанный с концом стеклянного стержня, обращенным от дистального конца зонда, для приема и передачи света.
Благодаря увеличенному удлинению стеклянного стержня в продольном направлении трубки можно захватывать окружающий свет в различных количествах или с различной интенсивностью в зависимости от того, как далеко стеклянный стержень выступает наружу за дистальный конец эндоскопа и насколько он таким образом экспонирован для света, т.е. освещается светом. Это делает возможным точное определение положений зонда.
В каждом из вариантов осуществления изобретения световод еще при экструзии ПТФЭ-рукава зонда может быть заделан в этот рукав по выбору на внутренней и наружной стороне рукава или может быть внедрен в стенку рукава.
Независимо от того или иного варианта осуществления изобретения предлагаемое в изобретении устройство определения положения, за исключением световода, а возможно также отдельного от него светозахватывающего элемента, такого, например, как стеклянный стержень, не содержит линз, зеркал или прочих оптических элементов для перенаправления луча света, захваченного радиально или поперек (сбоку) относительно продольной оси зонда, в проходящий вдоль зонда световод. Таким образом, устройство определения положения может быть реализовано малыми средствами, относительно простыми и недорогими, что делает его пригодным и для рабочих инструментов, таких, например, как эндоскопические зонды, рассчитанных на однократное применение и подлежащих утилизации после использования.
Хирургический зонд также может содержать устройство обработки данных, подключаемое или подключенное к проксимальному концу зонда и выполненное с возможностью приема и оценки поступающего в световод и направляемого по нему света для определения относительного положения зонда.
В предпочтительных вариантах осуществления изобретения устройство обработки данных может содержать оптический спектрометрический узел, выполненный с возможностью разделения поступающего света на его спектральные составляющие, чтобы обеспечить возможность определения спектра входящего света, т.е. интенсивности света в определенном диапазоне световых частот или на определенных дискретных частотах. Спектрометрический узел может быть построен, например, на базе светопреломляющей призмы или дифракционной решетки. Устройство обработки данных также может содержать электрооптический преобразователь, матрицу фотодиодов или иной подходящий прибор для преобразования света, разделенного на спектральные составляющие, в соответствующие электрические сигналы, поддающиеся оценке или анализу, чтобы определить частотный спектр поступающего светового сигнала. Анализ частотного спектра также может осуществляться, например, при помощи анализа Фурье. Можно получать непрерывный частотный спектр по существу для всей области частот поступающего света, только в отдельных полосах частот или же только на заданных дискретных частотах.
Устройство обработки данных также может содержать узел анализа спектра, выполненный таким образом, чтобы сравнивать интенсивность света, полученную в определенном диапазоне световых частот или на определенных дискретных частотах, с хранящимися в памяти значениями интенсивности эталонных спектров и на основании этого сравнения классифицировать или идентифицировать поступающий в световод свет.В частности, можно предварительно сохранять в памяти эталонный спектр подсвечивающего света эндоскопа, например источника холодного света, чтобы использовать его при оценке, выполняемой узлом анализа спектра. Кроме того, может быть задан и сохранен в памяти по меньшей мере один общий эталонный спектр для окружающего света в лечебном помещении, в котором используется эндоскоп с хирургическим зондом. Кроме того, при первоначальном включении, калибровке или обслуживании хирургического устройства существует возможность регистрации фактического окружающего света в лечебном помещении, преобразования его в соответствующий эталонный спектр и сохранения в памяти для последующих сеансов анализа устройством обработки данных. В любом случае можно определять соотношения интенсивностей поступающего в световод света в различных характерных частотных областях, в частотных полосах или на различных частотных линиях в сравнении с заданными сохраненными в памяти эталонными спектрами.
В этом случае узел анализа спектра может быть выполнен с возможностью проведения различия по меньшей мере между окружающим светом в лечебном помещении, регистрируемым при нахождении хирургического зонда вне эндоскопа, по меньшей мере почти полной темнотой, регистрируемой после ввода хирургического зонда в рабочий канал эндоскопа, но до выдвижения хирургического зонда своим дистальным концом из рабочего канала эндоскопа, и рабочим или операционным светом из эндоскопа, регистрируемым тогда, когда дистальный конец зонда выступает из рабочего канала эндоскопа в подвергаемую воздействию область организма пациента на столько, что через поверхность ввода света и световод поступает и регистрируется исходящий от эндоскопа рабочий или операционный свет.
Таким образом, узел анализа спектра может быть выполнен с возможностью проведения различия между несколькими источниками света, в частности источником холодного света эндоскопа, окружающим светом, а при необходимости - и светом, излучаемым плазмой при коагуляции. Если длины волн окружающего света находятся в видимой области, т.е. примерно между 400 и 800 нм, то рабочий свет от источника холодного света эндоскопа в общем случае будет иметь характерный спектр в области 400-700 нм, тогда как излучаемый плазмой свет имеет характерные спектральные составляющие между 200 и 400 нм, но также и составляющие в видимой области частот. Различия в специфических спектральных характеристиках, спектральных составляющих или спектральных линиях обеспечивают надежное различение узлом анализа спектра регистрируемых видов света.
Устройство обработки данных также может содержать детекторный узел, выполненный таким образом, чтобы при вводе зонда в рабочий канал эндоскопа распознавать ситуации, когда поверхность ввода света, относящаяся к устройству определения положения, обращена в окружающее пространство лечебного помещения, когда она входит из окружающего пространства в проксимальный конец рабочего канала или когда она выходит из рабочего канала в подвергаемую воздействию область организма, и на основании результатов этого распознавания генерировать соответствующие сигналы определения положения. Эти сигналы определения положения затем могут передаваться для дальнейшей обработки в устройство управления более высокого уровня, используемое для управления хирургическим зондом и/или эндоскопом.
В особенно предпочтительном варианте осуществления изобретения, характеризующемся очень низкой сложностью, устройство обработки данных содержит детекторное устройство, выполненное таким образом, чтобы определять, поступает ли или не поступает в световод свет минимальной интенсивности, и на этом основании генерировать соответствующие сигналы определения положения, которые могут свидетельствовать о том, что дистальный конец зонда находится снаружи или внутри рабочего канала эндоскопа. Для этого устройство обработки данных может содержать средство для преобразования поступающего светового сигнала в электрический сигнал, например фотодиод, и детекторный узел (детектор освещенности или темноты), способный сравнивать силу электрического сигнала, например, с заданным порогом для определения того, характеризует ли этот сигнал освещенность или темноту. Регистрироваться может смена освещенности на темноту или наоборот. Это позволяет устройству управления более высокого уровня или пользователю на основании своих знаний о мгновенном состоянии рабочего процесса констатировать, что зонд находится в окружающем пространстве лечебного помещения, в рабочем канале эндоскопа или в надлежащем рабочем положении. При помощи датчика освещенности или темноты можно очень просто автоматизировать определенные функции зонда, например, включать подачу слабого потока инертного газа (например аргона) во время введения зонда в эндоскоп с целью поддержания чистоты или блокировать подачу высокочастотных сигналов до тех пор, пока зонд не окажется в правильном положении. Анализ спектра и определение положения с повышенной точностью для этого не требуются.
В особенно предпочтительных частных вариантах осуществления изобретения устройство обработки данных, построенное на основе датчика освещенности или темноты, может быть встроено в интегральный соединитель, штепсель или штепсельное гнездо, расположенный(-ое) на проксимальном конце зонда и предусмотренный(-ое) для подключения к внешнему блоку управления, и может непосредственно выдавать в такой блок управления электрические сигналы, которые могут использоваться для автоматизированного управления. Этот вариант осуществления изобретения хорошо подходит, в частности, для одноразовых зондов, поскольку устройство обработки данных может быть реализовано с очень небольшими затратами и может утилизироваться вместе с зондом после однократного использования.
Если устройство обработки данных имеет более сложное исполнение и содержит спектрометрический узел и узел анализа спектра, оно также может быть реализовано на базе процессора. При этом некоторые функциональные части устройства обработки данных, такие, например, как детекторный узел, могут быть смонтированы в соединителе хирургического зонда, который служит интерфейсом между хирургическим зондом и блоком управления более высокого уровня, тогда как другие функциональные части, касающиеся, например, сохранения и оценки данных или сигналов, могут быть встроены во внешний блок управления.
В любом случае для зонда и/или эндоскопа может быть предусмотрено дополнительное устройство управления, связанное или связываемое с устройством обработки данных и выполненное таким образом, чтобы на основании передаваемых детекторным узлом сигналов определения положения (в простейшем случае - сигналов датчика освещенности или темноты) автоматически реализовывать определенные меры. Например, при приеме первого сигнала определения положения, характеризующего начало ввода зонда в эндоскоп, такое устройство управления может разрешать подачу инертного газа, например аргона, к зонду для поддержания его чистоты, если это является желательным или необходимым. Кроме того, на этой стадии может выполняться предварительная активация, при которой хирургический аппарат параметризуется для последующих операций. Например, при использовании хирургического зонда для коагуляции могут заранее выбираться требуемое высокочастотное напряжение и коагуляционный ток, а у эндоскопа может включаться используемая для лечения или операции подсветка. Предпочтительно задействуется блокировка активации, предотвращающая ненамеренное зажигание плазменного разряда для ионизации газовой струи, а значит препятствующая ненамеренное возникновение электрического пробоя, до тех пор, пока хирургический зонд не окажется в надлежащем рабочем положении относительно эндоскопа. Это позволяет исключить ситуацию, когда из-за непосредственной близости конца эндоскопа к поверхности подвергаемой воздействию ткани электрический пробой происходит еще при нахождении электрода зонда внутри рабочего канала эндоскопа или при лишь небольшом выступании из него, поскольку выделяющаяся при этом теплота может повредить корпус и другие компоненты эндоскопа, такие, например, как устройства наблюдения и подсветки.
Если устройство управления примет от детекторного узла еще один сигнал определения положения, указывающий, что дистальный конец зонда, например с электродом, достиг надлежащего рабочего положения, т.е. выдвинулся на требуемое для воздействия расстояние относительно дистального конца эндоскопа, устройство управления может автоматически снять блокировку активации и затем обеспечить приложение к электроду необходимого высокочастотного напряжения и подачу необходимого коагуляционного тока, подачу инертного газа под необходимым давлением, если этого еще не произошло, регулирование расхода среды или управление иными параметрами работы зонда и/или эндоскопа.
В предпочтительном варианте применения предлагаемый в изобретении зонд представляет собой зонд для аргоноплазменной коагуляции (АПК), используемый для высокочастотной коагуляции биологической ткани посредством гибкого эндоскопа. В этом случае зонд содержит трубку, выполненную в виде гибкого рукава из неэлектропроводного материала, например из политетрафторэтилена (ПТФЭ), с возможностью подачи через рукав инертного газа, в частности аргона, и расположенный на дистальном конце трубки электрод, питаемый для ионизации газа высокочастотным коагуляционным током, подаваемым по соединительной линии, проходящей во внутреннем канале трубки.
Хирургический зонд может быть выполнен с возможностью его применения и по другим связанным с эндоскопией назначениям, например диагностическим назначениям, для видеоскопов, эндоскопов, гастроскопов, бронхоскопов, колоноскопов, гистероскопов, цистоскопов, артроскопов, сердечных катетеров, бороскопов, фиброскопов, лапароскопов и т.п., а также для гипертермических применений и т.д., причем устройство определения положения всегда позволяет позиционировать головку на дистальном конце зонда во время лечения, операции или сеанса в надлежащем положении относительно эндоскопа.
Также может быть предусмотрено устройство индикации, выполненное таким образом, чтобы оптическим, акустическим, тактильным или иным образом выводить оператору выдаваемые детекторным узлом сигналы определения положения, чтобы показывать оператору соответствующее положение зонда. В этом случае оператор может вручную принимать меры, необходимые для управления работой зонда или эндоскопа.
Изобретение позволяет простым образом, при невысокой конструктивной и вычислительной сложности определять положение хирургического зонда относительно эндоскопа, чтобы, например, избегать повреждений эндоскопа во время коагуляции, соблюдать допустимые термические нагрузки на дистальном конце как зонда, так и эндоскопа и/или избегать контакта с подвергаемой воздействию тканью с загрязнением оптического волокна. Благодаря направлению света по световоду и относительно быстрой оценке сигналов времена запаздывания весьма невелики. Применяются недорогие компоненты, которые, в частности при использовании смонтированного в соединителе детекторе освещенности или темноты, особенно подходят и для одноразовых зондов. Для осуществления изобретения не требуется использовать контактные выключатели, оптические датчики, прочие средства, к которым нужно целенаправленно подавать измерительные сигналы, и шунтовые сопротивления в измерительной схеме.
Другие предпочтительные частные варианты осуществления изобретения описаны в зависимых пунктах формулы изобретения, на чертежах, а также в соответствующем разделе описания. Далее изобретение подробнее описывается со ссылкой на чертежи, показывающие примеры осуществления изобретения, ни в коем случае не ограничивающие возможностей осуществления изобретения, причем на всех чертежах для обозначения одинаковых элементов используются одинаковые ссылочные номера. На чертежах показано:
на фиг. 1 перспективное изображение медицинского аппарата, содержащего эндоскоп и введенный в него предлагаемый в изобретении зонд в сильно схематизированном представлении;
на фиг. 2 - перспективное изображение отдельно взятого зонда, показанного на фиг. 1, в сильно схематизированном представлении;
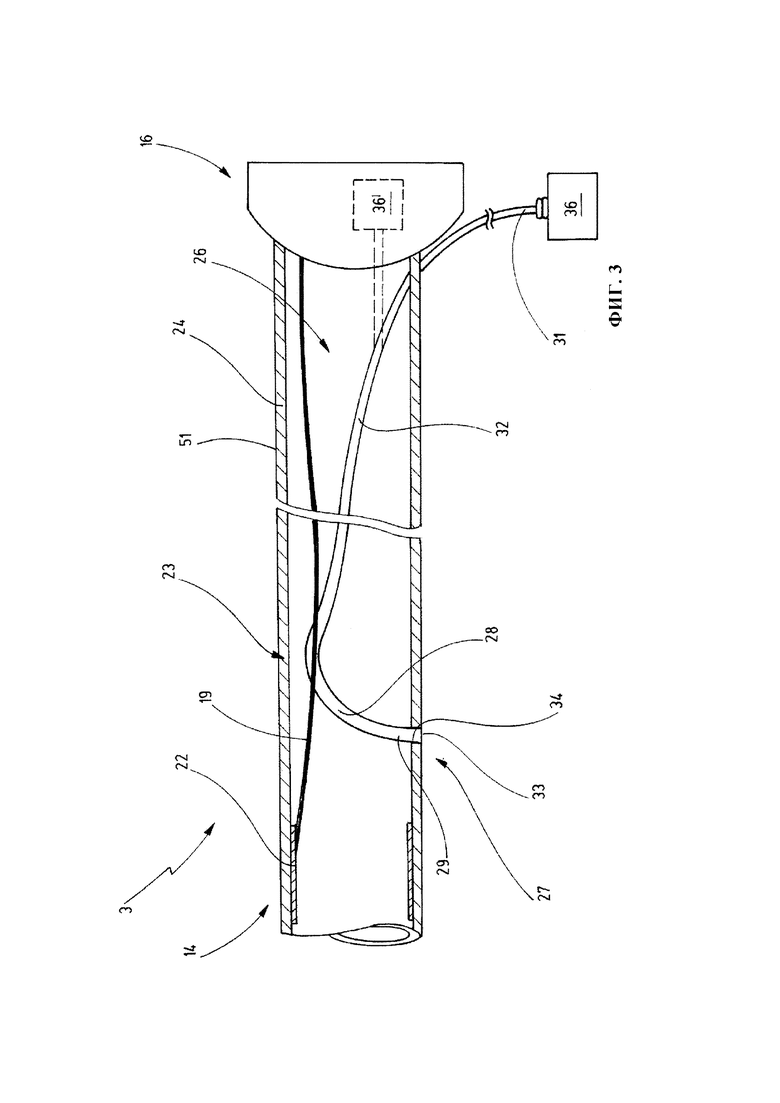
на фиг. 3 упрощенный вид зонда, показанного на фиг. 1 и 2, в продольном разрезе;
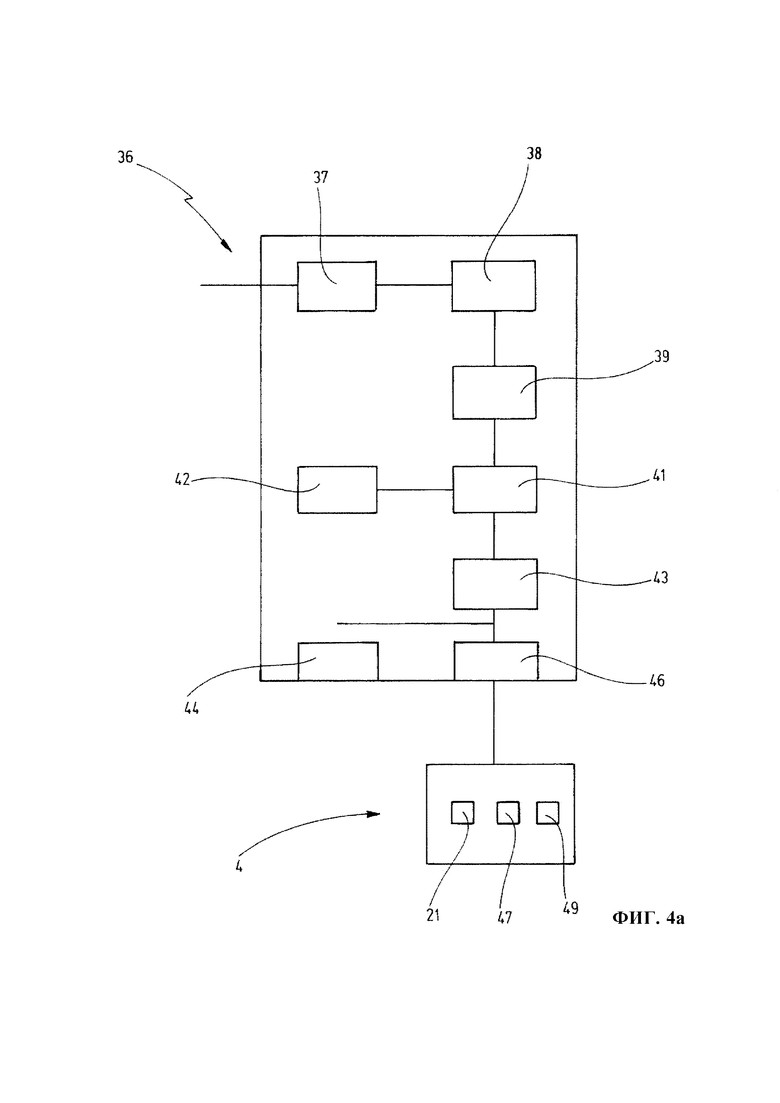
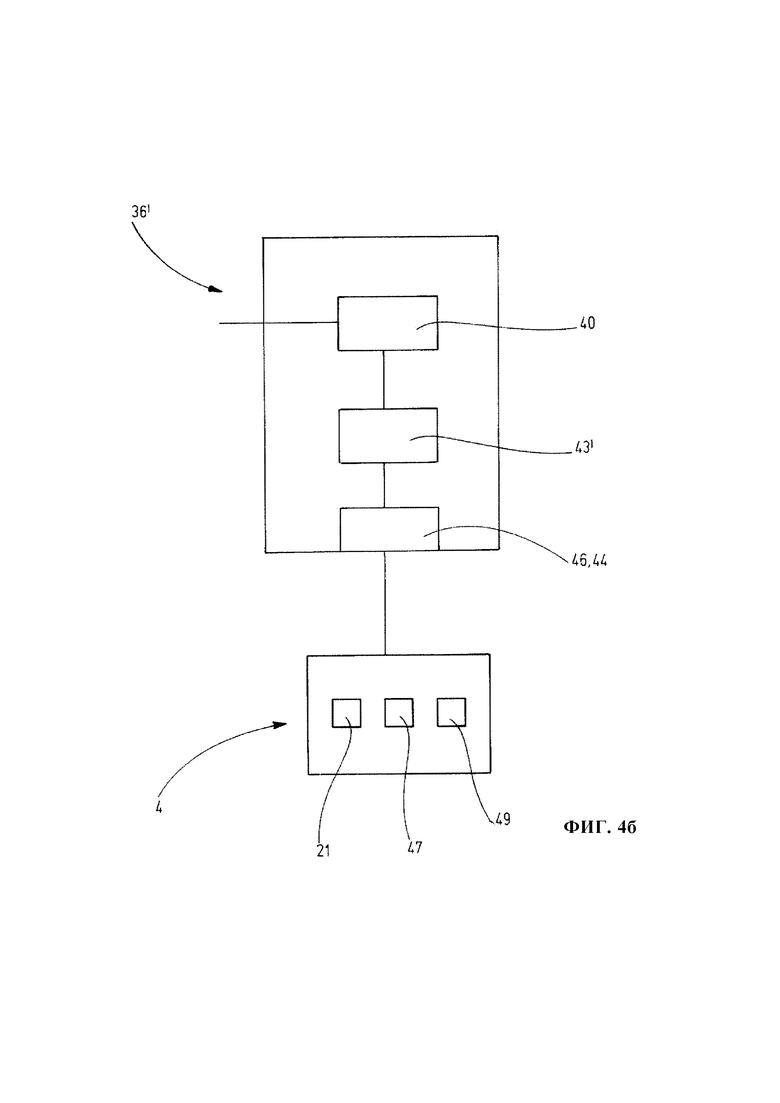
на фиг. 4а и 4б - упрощенные структурные схемы вариантов выполнения устройства обработки данных для зонда, показанного на фиг. 1-3;
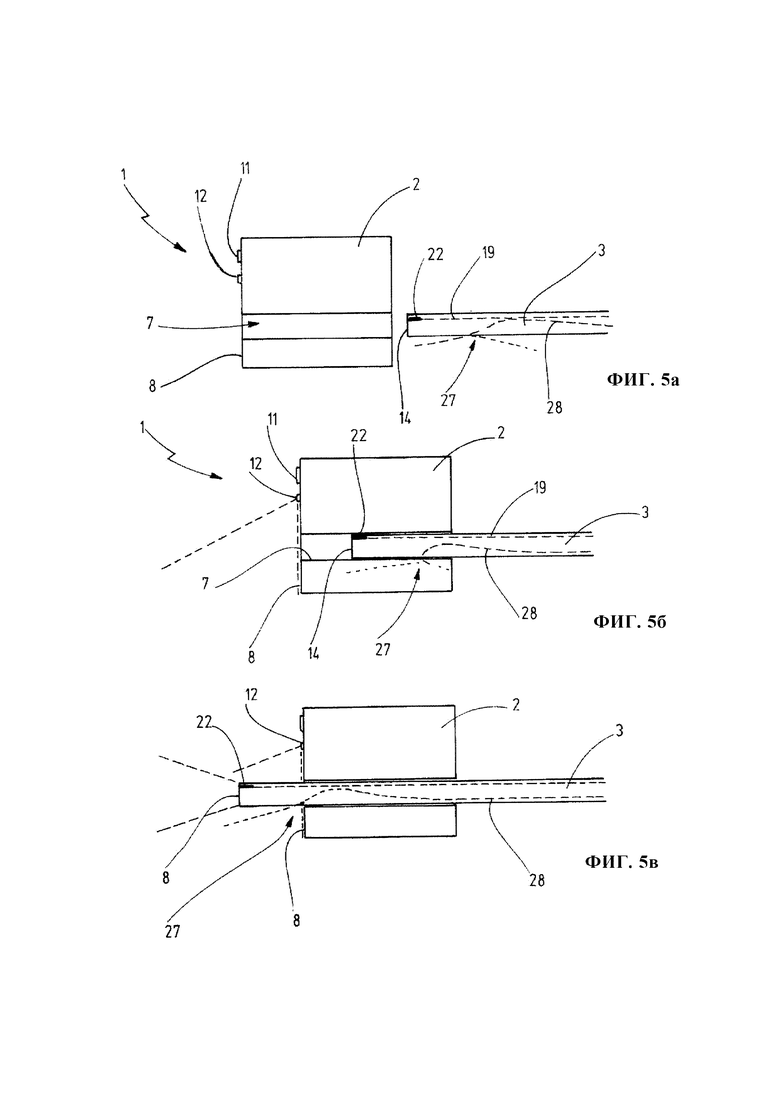
на фиг. 5а-5в упрощенные схематические изображения эндоскопа и зонда, находящихся в различных взаимных положениях, т.е. положениях относительно друг друга, для иллюстрации принципа работы;
на фиг. 6 еще один вариант выполнения предлагаемого в изобретении зонда в сильно схематизированном продольном разрезе; и
на фиг. 7а и 7б - еще один вариант выполнения предлагаемого в изобретении зонда в сильно схематизированных продольных разрезах и в различных положениях относительно эндоскопа.
На фиг. 1 в сильно схематизированном представлении показана эндоскопическая система 1 в одном варианте осуществления изобретения, содержащая гибкий эндоскоп 2, вставленный в эндоскоп 2 зонд 3 и блок 4 управления. В рассматриваемом примере эндоскопическая система 1 предусмотрена для проведения аргоноплазменной коагуляции (АПК) с целью остановки кровотечений из пораженных участков (повреждений) ткани, в частности желудочно-кишечного тракта, но вместе с тем изобретение может найти применение и в других медицинско-эндоскопических системах. Если, например, в данном случае показан гибкий эндоскоп 2, в других случаях применения может использоваться и жесткий эндоскоп 2. Предлагаемая в изобретении эндоскопическая система может использоваться для множества других видов лечения или операций, например для десикации поверхности ткани, для эрадикации остатков после полипэктомии, для отделения струпьев опухоли или для термической маркировки тканей.
Эндоскоп 2 в данном случае содержит продолговатую поддающуюся изгибу трубку или гибкий рукав 6 из подходящего биосовместимого гибкого материала, в частности из полимерного материала, такого, например, как политетрафторэтилен (ПТФЭ), пригодного для использования внутри организма человека. Рукав 6 образует рабочий канал 7, в который могут вводиться различные зонды. Например, в данном случае в рабочем канале 7 эндоскопа 1 помещается с возможностью перемещения хирургический зонд 3, который выступает из рабочего канала 7, выдаваясь наружу из дистального конца 8 эндоскопа 2, предназначенного для введения в тело пациента. На дистальном конце 8 также выведен еще один, опциональный, рабочий канал 9, который при необходимости может использоваться для других зондов.
Также на дистальном конце 8 эндоскопа 2 расположен объектив (линза) или наблюдательное устройство 11, которое может содержать камеру на приборах с зарядовой связью (ПЗС-камеру) или может быть связано посредством стекловолоконного жгута с не показанным на чертежах окулярным устройством.
Кроме того, эндоскоп 2 содержит подсвечивающее устройство 12, содержащее осветительные средства, выдающиеся наружу на дистальном конце 8 эндоскопа 1 и связанные посредством световода с источником света, предпочтительно с источником холодного света, чтобы во время работы принимать свет высокой интенсивности в видимой области спектра и направлять этот свет в не показанную на чертежах область воздействия или операции внутри организма пациента. Это позволяет наблюдать за областью воздействия или операции посредством наблюдательного устройства 11, в том числе снимать изображения ПЗС-камерой, в то время как использование холодного света позволяет избежать выделения теплоты, как это происходит при использовании обычных источников света.
Зонд 3 можно вводить в проксимальный конец 13 эндоскопа 2 до тех пор, пока зонд, как показано на фиг. 1, не выйдет из дистального конца 8 рабочего канала 7. В этом положении дистальный конец 14 зонда 3 находится в поле зрения наблюдательного устройства 11 эндоскопа 2, освещаемом подсвечивающим устройством 12.
Проксимальный конец 16 зонда 3 посредством соединителя или штепселя 15 подключен к блоку 4 управления. Соединитель 15 содержит линию 17 подачи газа, сообщающую зонд 3 с устройством 18 снабжения газом, входящим в состав блока 4 управления. Устройство 18 снабжения газом связано с источником газа, например с содержащим аргон газовым баллоном, и выполнено таким образом, чтобы подавать к зонду 3 газ, например аргон, с заданным давлением, подходящим для соответствующего воздействия (лечения).
Соединитель 15 также содержит электрическую соединительную линию 19, посредством которой зонд 3 электрически связан с высокочастотным генераторным устройством 21 блока 4 управления для получения от этого генераторного устройства высокочастотного напряжения, необходимого для зажигания плазменного разряда с целью ионизации инертного газа, например аргона, для подачи в ткань коагуляционного тока. Для этого на дистальном конце 14 зонда 3 предусмотрен электрод 22, подключенный к соединительной линии 19. Электрод 22 в данном случае представлен в виде стержневидного или трубчатого поджигающего электрода, но может принимать любые формы, например форму пластинчатого поджигающего электрода. Электрод 22 также может быть расположен в насадке или головке зонда 3, на чертежах не показанной, которая может быть выполнена, например, из керамики, чтобы во время работы противостоять тепловому воздействию от зажженного плазменного разряда.
На фиг. 2 приведено перспективное изображение отдельно взятого хирургического зонда 3 в упрощенном представлении, а на фиг. 3 зонд показан в схематизированном продольном разрезе. Как видно на этих чертежах, зонд 3, также называемый зондом, содержит трубку 23, которая в данном случае выполнена в виде гибкого рукава из соответствующего биосовместимого материала, пригодного для рассматриваемых в данном описании применений, в частности из ПТФЭ. В случае жесткого эндоскопа может использоваться и жесткая трубка 23. Трубка 23 имеет стенку 24, образующую по существу цилиндрический внутренний канал 26, также называемый просветом, через который к дистальному концу 14 зонда 3 подается газ, например аргон. Во внутреннем канале 26 также проложена соединительная линия 19, проходящая от проксимального конца 16 зонда 3 до его дистального конца 14 и там соединенная с электродом 22.
При проведении аргоноплазменной коагуляции важно позиционировать электрод 22 используемого зонда 3 в надлежащем положении относительно эндоскопа 2. В частности, электрод 22 должен располагаться на некотором минимальном расстоянии от дистального конца 8 эндоскопа 2, чтобы после зажигания плазменного разряда, когда ионизированный газ служит проводником для подачи коагуляционного тока, выделяющаяся при этом теплота не повреждала эндоскоп 2. Например, зонд 3 может быть рассчитан на однократное применение, вследствие чего он является относительно недорогим в производстве и после эндоскопического лечения или эндоскопической операции выбрасывается. Эндоскоп же со своими компонентами является относительно дорогостоящим и рассчитан на многократное применение. Поэтому компоненты, расположенные, в частности, на дистальном конце 8 эндоскопа 2, такие, например, как наблюдательное устройство 11, подсвечивающее устройство 12 и т.п., должны быть защищены от повреждения выделяющейся во время работы теплотой. Для этого, например, в случае АПК-зонда 3 с наружным диаметром около 2-5 мм необходимо выдерживать минимальное расстояние между рабочим концом АПК-зонда с электродом 22 и дистальным концом 14 эндоскопа 2, составляющее по меньшей мере около 10 мм.
И наоборот, электрод 22 не должен выдаваться из рабочего канала 7 эндоскопа 2 слишком далеко, чтобы во время работы электрод находился в поле подсветки подсвечивающего устройства 12 и в поле зрения наблюдательного устройства 11, а также чтобы исключить возможность нежелательных прикосновений электрода 22 к поверхности подвергаемой воздействию ткани с соответствующим риск травмирования ткани.
Есть и другие варианты применения, в которых рабочий конец зонда нужно надлежащим образом позиционировать относительно конца эндоскопа, чтобы, например, обеспечить эффективность проведения эндоскопического лечения или сеанса или избегать нежелательного контакта оптики или зонда на рабочем конце зонда с тканью.
Для обеспечения возможности надлежащего позиционирования зонда 3 относительно эндоскопа 2 и контроля положения активного электрода 22 предусмотрено устройство 27 определения положения. Если снова обратиться к фиг. 2 и 3, устройство 27 определения положения содержит световод 28, закрепленный на зонде 3 и выполненный с возможностью поступления в него света, окружающего зонд 3 у его дистального конца 14, и посредством поступающего в световод 28 света способно определять положение зонда 3 относительно эндоскопа 2.
Световод 28 неподвижно закреплен на зонде 3 таким образом, что он вместе с зондом 3 может вводиться в рабочий канал 7 эндоскопа 1 с возможностью перемещения в нем. При этом световод может проходить от места, находящегося у дистального конца 14 зонда 3, до проксимального конца 16 для направления поступающего из окружающего пространства света к проксимальному концу зонда 3 для оценки этого света. Световод 28 может содержать любое оптическое волокно, например стекловолокно или, предпочтительно, полимерное оптическое волокно. На рынке доступны относительно недорогие оптические волокна, пригодные для выполнения рассматриваемой функции определения положения зонда, для реализации которой не требуется захватывать и передавать свет с наивысшим качеством и абсолютно без потерь.
Если снова обратиться к фиг. 2 и 3, световод 28 в представленном варианте осуществления изобретения размещен в значительной мере во внутреннем канале 26 зонда 3. Световод 28 имеет первый конец 29, прикрепленный к трубке 23 зонда 3, второй конец 31, выведенный за проксимальный конец 16 трубки 23, и проходящий между ними средний участок 32 световода, размещенный в основном во внутреннем канале 26. Первый конец 29 световода 28 проходит насквозь через стенку 24 трубки 23 и имеет торцевую поверхность 33, обращенную наружу радиально или вбок (поперек) относительно не показанной на чертежах продольной оси зонда 3. Торцевая поверхность 33 образует поверхность ввода света для захвата наружного света на наружной стороне трубки 23 и направления этого света в световод 28. Захватываемый таким образом свет передается по среднему участку 32 световода ко второму концу 31 световода 28.
Первый конец 29 световода 28 плотно посажен в отверстие 34, выполненное в гибкой трубке 23, и может быть дополнительно зафиксирован в этом отверстии, например при помощи клея. Торцевая поверхность 33 световода 28, служащая поверхностью ввода света, предпочтительно расположена по существу заподлицо с наружной стороной трубки 23. Сама трубка 23 состоит из непрозрачного материала.
Второй конец 31 световода 28 связан с устройством 36 обработки данных, подключаемым или подключенным к проксимальному концу 16 зонда 3 и выполненным с возможностью приема поступающего в световод 28 света и его оценки для определения относительного положения зонда 3. Варианты выполнения устройства 36 обработки данных представлены на упрощенных структурных схемах, приведенных на фиг. 4а и 4б.
Как показано на фиг. 4а, в первом варианте своего выполнения устройство обработки данных может содержать спектрометрический узел 37, электрооптический преобразователь 38, узел 39 формирования сигналов, узел 41 анализа спектра, запоминающее устройство 42, детекторный узел 43, устройство 44 вывода и интерфейс 46. Хотя узлы 37-46 представлены на схеме в виде отдельных блоков, они представляют собой лишь функциональные узлы, которые могут содержаться в одном или нескольких физических блоках, могут быть распределены по различным блокам, могут быть реализованы аппаратными и/или программными средствами и по меньшей мере частично могут быть воплощены в логике, которая может быть реализована в виде кода, выполняемого в не показанном на чертежах процессоре, для выполнения функции устройства 36 обработки данных по оценке принимаемого световодом 28 света и определению положения зонда 3.
Спектрометрический узел 37 связан со световодом 28 для приема поступающего из него света и делит свет по спектру на отдельные частотные составляющие. Спектрометрический узел 37 может содержать, например, светопреломляющую призму или дифракционную решетку. Получаемый в результате свет перед его подачей в электрооптический преобразователь 38 при необходимости можно пропускать через фильтр. Электрооптический преобразователь 38, который также может представлять собой фотодиодную матрицу, преобразует спектрально разделенный свет в соответствующие электрические сигналы для последующей оценки и анализа, чтобы определить частотный спектр поступающего светового сигнала. Полученные электрические сигналы можно усиливать в узле 39 формирования сигналов, отфильтровывать от помеховых сигналов, например, пропускать через фильтр нижних частот или полосовой фильтр, и формировать иным образом для дальнейшей обработки.
Узел 41 анализа спектра выполнен таким образом, чтобы оценивать электрические сигналы, представляющие спектрально разделенные составляющие света, для определения спектральных составляющих света, или интенсивностей света, в различных диапазонах частот света или на определенных дискретных частотах и их сравнения с хранящимися в памяти эталонными спектрами, чтобы на основании этого сравнения классифицировать или идентифицировать поступающий в световод свет. Эталонные спектры можно заранее определять и сохранять в запоминающем устройстве 42. В памяти может быть сохранен эталонный спектр для холодного света эндоскопа 3, для окружающего света в рабочем помещении, а также для света плазмы, возникающего от искрового разряда при АПК-коагуляции. Все эти источники света имеют характерные спектры, отчетливо различающиеся в отношении соответствующего частотного диапазона и значений интенсивности в нем. Например окружающий свет в рабочем помещении будет иметь длины волн в области 300-1100 нм с характерным первым распределением интенсивности, тогда как рабочий свет от источника холодного света эндоскопа в общем случае находится в диапазоне длин волн 400-700 нм или в содержащемся в нем поддиапазоне и имеет второе характерное распределение интенсивности, а свет, излучаемый плазмой, имеет характерные составляющие как в видимом диапазоне длин волн, так и в диапазоне 200-400 нм с другим, третьим распределением интенсивности.
Один или несколько этих видов света, а именно окружающего света, холодного света эндоскопа и/или излучаемого плазмой света, также можно регистрировать экспериментально, чтобы на этом основании определять и сохранять в памяти соответствующие эталонные спектры. В качестве альтернативы такому подходу в качестве эталонных спектров также можно использовать репрезентативные частотные спектры, получаемые производителями соответствующих осветительных приборов или устройств, или смоделированные спектры света. В любом случае узел 41 анализа спектра способен путем сравнения значений интенсивности определенных дискретных частотных линий или частотных диапазонов в различных полосах частот определять, поступил ли свет через световод 28, и если да, то идет ли при этом речь о холодном свете подсвечивающего устройства 12 эндоскопа 2, об окружающем свете смотрового или лечебного помещения или о световом сигнале, обусловленном искровым разрядом.
Детекторный узел 43 контролирует вид света, идентифицированный узлом анализа спектра, и выполнен таким образом, чтобы при вводе зонда 3 в рабочий канал 7 эндоскопа 2 определять ситуации, когда поверхность ввода света, в частности торцевая поверхность 33 световода 28, обращена в окружающее пространство лечебного помещения, когда она входит из окружающего пространства в проксимальный конец 13 рабочего канала 7 или когда она выходит из рабочего канала 7 в подвергаемую воздействию область организма. На основании результата этого определения детекторный узел 43 генерирует соответствующие сигналы определения положения, которые, например, характеризуют начало ввода зонда 3 в рабочий канал 7 или указывают, что дистальный конец 14 зонда 3 выступает за дистальный конец 8 эндоскопа 2 на требуемое расстояние, которое соответствует расстоянию между дистальным концом 14 зонда 3 и поверхностью 33 ввода света.
Опциональное устройство 44 вывода может быть связано с детекторным узлом 43 для приема от него сигналов определения положения и их преобразования в сигналы оптической, звуковой или тактильной индикации, которые могут восприниматься оператором хирургического зонда 3. Таким образом оператор может узнать, когда зонд 3 окажется в надлежащем рабочем положении относительно эндоскопа 2.
В качестве альтернативы или дополнения детекторный узел 43 может быть связан посредством интерфейса 46 с блоком 4 управления эндоскопической системы 1, который может принимать от детекторного узла 43 сигналы определения положения и на их основании автоматически инициировать принятие соответствующих мер, например осуществлять блокировку активации, предварительную активацию, параметризацию и/или управление работой зонда 3 и/или эндоскопа 2.
На фиг. 4б показан еще один, особенно предпочтительный, вариант выполнения устройства 36` обработки данных, реализованный на очень малом уровне сложности с возможностью сильно упрощенной оценки поступающего в световод 28 света для грубого определения положения. В частности, устройство 36` обработки данных может обеспечивать лишь возможность определения присутствия и отсутствия поступающего света, т.е. проведения различия между освещенностью и темнотой. Как видно на фиг. 4б, в этом случае устройство 36` обработки данных может содержать средство 40 преобразования поступающего светового сигнала в электрический сигнал, в частности фотодиод, и детекторный узел 43`, представляющий собой детектор освещенности или темноты. Детекторный узел 43` предпочтительно может сравнивать силу электрического сигнала, генерируемого фотодиодом или иным аналогичным средством, с заданным порогом, для определения того, имеет ли свет, поступающий в световод 28, минимальную интенсивность, и на основании этого сравнения может генерировать сигналы определения положения, свидетельствующие о том, что дистальный конец 14 зонда 3 освещается светом (состояние освещенности) или нет (состояние темноты), т.е. о том, находится ли он вне или внутри рабочего канала 7 эндоскопа 2. Таким образом можно также регистрировать переходы от освещенности к темноте или от темноты к освещенности. В этом случае оператор или устройство управления более высокого уровня, реализованное во внешнем блоке 4 управления, может по этому мгновенному рабочему состоянию определять, в каком приблизительном относительном положении находится зонд 3. Дифференциация различных видов света и более точное определение положения в данном случае не требуются. Соответственно в данном случае функциональные узлы 37-41 для определения и анализа частотного спектра могут отсутствовать. Интерфейс 44, 46, дополнительно представленный на фиг. 4б, в простейшем случае может представлять собой соединительную линию, штепсельный штифт или штепсельное гнездо.
Принцип работы описанной эндоскопической системы 1 предлагаемой в настоящем изобретении, рассматривается ниже с дополнительной ссылкой на фиг. 5а-5в, на которых отдельно показаны рабочие процессы при соответствующих положениях зонда 3 относительно эндоскопа 2. Эндоскопическая система 1 функционирует следующим образом:
Если необходимо провести аргоноплазменную коагуляцию, оператор может посредством блока 4 управления выбрать нужный режим, в результате чего могут активироваться компоненты эндоскопической системы 1, в том числе устройство 27 определения положения. Устройство 27 определения положения на основании поступающего в световод 28 света после его оценки устройством 36, 36` обработки данных определяет, что зонд 3 еще находится вне эндоскопа 2, как это показано на фиг. 5а, и освещается окружающим светом в лечебном помещении. Детекторный узел 43 определяет, например, что полученный частотный спектр поступающего в световод света по меньшей мере на определенных дискретных частотах совпадает с эталонным спектром окружающего света, но в любом случае явно отличается от эталонных спектров источника холодного света эндоскопа 2 и излучаемого плазмой светового сигнала, и отправляет через интерфейс 44, 46 соответствующий сигнал положения. В качестве альтернативы детекторный узел 43`, предусмотренный для определения состоянии освещенности и темноты, отправляет сигнал освещенности. Когда речь идет о сигналах положения, к таким сигналам также следует относить сигналы освещенности или темноты, генерируемые детекторным устройством 40, 43`, предусмотренным для определения состояний освещенности или темноты.
Когда оператор затем вводит зонд 3 в проксимальный конец 13 эндоскопа 2, и торцевая поверхность 33 световода 28 входит в рабочий канал 7, как это показано на фиг. 5б, интенсивность поступающего в световод 28 света довольно резко снижается. Внутри рабочего канала 7 господствует практически абсолютная темнота. Прекращение поступления светового сигнала может быть быстро и надежно распознано устройством 36, 36` обработки данных, после чего детекторный узел 43, 43` может выдать в устройство 44 вывода и/или в блок 4 управления соответствующий сигнал темноты. Затем блок 4 управления может произвести - если этого еще не произошло - предварительную активацию эндоскопической системы 1, включая параметризацию высокочастотного генераторного устройства 21, включение подсвечивающего устройства 12 и предварительную настройку управляющих клапанов для подачи газа. В некоторых вариантах применения подача инертного газа может начинаться еще при обнаружении ввода зонда 3 в рабочий канал 7, чтобы в процессе этого ввода сохранять зонд 3 в чистоте.
Как только дистальный конец 14 зонда 3 выйдет из дистального конца 8 эндоскопа 2 на столько, что торцевая поверхность 33 световода 28 покинет рабочий канал 7, как это показано на фиг. 5в, торцевая поверхность 33 захватит рабочий свет, излучаемый подсвечивающим устройством 12 на дистальном конце 8 эндоскопа 2 для освещения подвергаемой воздействию или оперируемой области. Этот свет подводится от соответствующего источника 47 холодного света, который, например, может быть встроен в блок 4 управления или же может быть внешним источником света. Устройство 36, 36` обработки данных, входящее в состав устройства 27 определения положения, принимает по световоду 28 световой сигнал и обнаруживает резкую смену отсутствия светового сигнала его присутствием. Например, детектор 43` освещенности или темноты обнаруживает переход из темноты в освещенность и снова сообщает о поступлении сигнала освещенности. В качестве альтернативы, узел 41 анализа спектра, входящий в состав устройства 36 обработки данных, может определять частотный спектр поступающего света и путем обращения к хранящимся в запоминающем устройстве 42 эталонным спектрам устанавливать, что поступающим в световод светом является рабочий свет, т.е. холодный свет эндоскопа 2. Тогда детекторный узел 43, 43` посредством устройства 44 вывода может выдать соответствующий сигнал определения положения оператору, который таким образом может узнать, что рабочий конец зонда с электродом 22 достиг надлежащего заданного положения, и продвигать зонд 3 дальше уже не нужно.
В качестве альтернативы или дополнения, сигнал определения положения может быть передан посредством интерфейса 46 в блок 4 управления, который в ответ на это может снять блокировку активации для высокочастотного электрического сигнала, а также может автоматически приступить к управлению работой зонда 3. Например, если этого еще не произошло, может автоматически инициироваться подача к зонду 3 ионизируемого газа, например аргона, и разблокироваться зажигание плазменного разряда электродом 22. Таким образом, высокочастотное генераторное устройство 21 может подавать по соединительной линии 19 к электроду 22 сигнал высокочастотного напряжения, необходимый для зажигания плазменного разряда и ионизации газа, после чего образовавшаяся аргоновая плазма используется в качестве проводника для передачи коагуляционного тока на подвергаемую воздействию ткань. Посредством оптической системы 11, например ПЗС-камеры, подвергаемую воздействию область можно снимать, передавая сигналы изображения по световоду 48 в узел 49 обработки изображений, входящий в состав блока 4 управления, чтобы выводить их для оператора на дисплей, на чертежах не показанный.
Если оператор случайно или специально втянет зонд 3 обратно на столько, что торцевая поверхность 33 световода 28 окажется в рабочем канале 7, это будет распознано узлом 36, 36` обработки данных, входящим в состав устройства 27 определения положения. Тогда блок 4 управления может автоматически остановить работу зонда 3 и включить блокировку активации, чтобы прервать подачу газа и/или высокочастотного напряжения, что позволяет погасить искровой разряд и предотвратить повреждение эндоскопа 2.
Неоднократное втягивание зонда 3 в рабочий канал 7 и выдвижение зонда 3 из рабочего канала 7 также может выполняться оператором целенаправленно для точного нахождения места, в котором зонд 3 занимает надлежащее рабочее положение. В этой ситуации активацию или снятие блокировки активации можно задержать на время, пока оператор выполняет регулировку.
Изобретение может быть реализовано во множестве модификаций. Так, устройство 36, 36` обработки данных может быть размещено в отдельном от зонда 3 блоке, например в блоке 4 управления. В качестве альтернативы такому расположению, одни части устройства 36, 36` обработки данных, например части, реализуемые аппаратными средствами, могут быть размещены в соединителе 15, образующем интерфейс сопряжения с внешним блоком 4 управления, тогда как другие части устройства 36, 36` обработки данных, например части, реализуемые программно-аппаратными или программными средствами, могут быть реализованы, например, в блоке 4 управления или в другом внешнем устройстве.
В особенно предпочтительном варианте осуществления изобретения, представленном на фиг. 3 прерывистыми линиями, устройство 36` обработки данных, показанное фиг. 4б, с детекторным устройством, образованным фотодиодом 40 и детектором 43` освещенности или темноты, полностью размещено в соединителе 15, который расположен на проксимальном конце 16 зонда 3 и служит для подключения к блоку 4 управления. Это позволяет создать довольно компактный, практически автономный блок, состоящий из зонда 3 и относящегося к нему устройства 27 определения положения и хорошо подходящий для применения в качестве одноразового зонда, поскольку несложное и относительно недорогое детекторное устройство 40, 43` можно утилизировать после однократного использования вместе с зондом.
В еще одной модификации встроенное в соединитель 15 детекторное устройство для распознавания освещенности или темноты, входящее в состав показанного на фиг. 4б устройства 36` обработки данных, может содержать только фотодиод 40 или иное средство для преобразования поступающего света в электрический сигнал. Тогда электрический сигнал можно передавать посредством интерфейса 46 во внешний блок 4 управления для пороговой фильтрации и/или оценки. Функциональность показанного на фиг.46 детекторного узла 43` для распознавания освещенности или темноты можно переместить в блок 4 управления, что дополнительно упрощает и удешевляет смонтированное в соединителе 15 устройство 36` обработки данных.
Другие варианты выполнения предлагаемого в изобретении устройства 27 определения положения показаны на фиг.6, 7а и 7б. В части, касающейся совпадения этих вариантов с рассмотренными выше в отношении конструкции и/или принципа работы, можно сослаться на приведенное выше описание с учетом идентичности ссылочных обозначений, относящихся к одинаковым элементам.
На фиг. 6 показан вариант, в котором световод 28 расположен не во внутреннем канале 26 трубки 23 зонда 3, а на наружной стороне 51 стенки 24. Световод 28 может иметь скошенную торцевую поверхность или фацетную поверхность 52 волокна, служащую поверхностью ввода света, для захвата окружающего света на дистальном конце 14 зонда 3 и его ввода в средний участок 32 световода, передающий свет для его оценки далее к проксимальному концу 16 зонда 3. Скошенная торцевая поверхность 52 обращена как радиально или вбок наружу, так и в продольном направлении зонда 3, предпочтительно - к его дистальному концу 14. Средний участок 32 световода 28 проходит от косой торцевой поверхности 52 по существу прямолинейно вдоль трубки 23 по ее наружной стороне 51 и может быть закреплен на этой наружной стороне 51, например при помощи клея. В принципе световод 28 также можно расположить по существу заподлицо с наружной стороной 51 трубки 23, внедрив оптическое волокно в рукав 23 зонда 3 еще при его экструзии. Независимо от того, как именно световод 28 крепится на наружной стороне стенки 24 рукава 23, такое крепление на наружной стороне проще по сравнению с размещением во внутреннем канале 26 зонда 3. Принцип работы устройства 27 определения положения в показанном на фиг.6 варианте соответствует принципу работы, описанному выше со ссылкой на фиг. 1-5.
На фиг. 7а и 7б показан еще один вариант выполнения предлагаемого в изобретении устройства 27 определения положения, причем в данном случае поверхность ввода света для захвата света, окружающего зонд 3, образована отдельным световводящим элементом, а именно - в рассматриваемом примере -продолговатым стеклянным стержнем 53. Стеклянный стержень 53, который может быть выполнен из силикатного стекла или акрилового стекла, расположен на наружной стороне 51 трубки 23 и прикреплен к ней и/или внедрен в нее. В любом случае продолговатый стеклянный стержень 53 имеет длину, превышающую его ширину и ориентированную вдоль продольной протяженности зонда 3. Длина стеклянного стержня 53 может быть любой, предпочтительно - большей половины длины вылета дистального конца 14 зонда 3 в надлежащем рабочем положении или большей расстояния между дистальным концом 14 зонда 3 и дистальным концом стеклянного стержня 53. Наружная поверхность 54 стеклянного стержня 53, обращенная радиально или вбок наружу, служит поверхностью ввода света. Торец 56 стеклянного стержня 53, обращенный от дистального конца 14 зонда 3, т.е. противоположный ему, связан с торцом 57 световода 28, вследствие чего свет, поступающий в стеклянный стержень 53, направляется в световод 28 и передается по нему далее к проксимальному концу 16 зонда 3.
Принцип работы зонда 3 и устройства 27 определения положения в показанном на фиг. 7а, 7б варианте осуществления изобретения практически соответствует принципу работы описанных выше вариантов осуществления изобретения, но в данном случае обеспечивается более точное определение положения зонда 3 относительно эндоскопа 2. Например, на фиг. 7а показано состояние надлежащего позиционирования зонда 3, в котором дистальный конец 14 зонда 3 вышел из рабочего канала 7 на столько, что электрод 22 находится на требуемом расстоянии от дистального конца 8 эндоскопа 2. В этом случае стеклянный стержень 53 также полностью выдвинут из рабочего канала 7, в результате чего в световод 28 поступает световой сигнал высокой интенсивности, направляемый в устройство 27 определения положения. Устройство 36, 36` обработки данных распознает этот световой сигнал максимальной интенсивности, например по максимальному из нескольких порогов, и в ответ на это генерирует сигнал определения положения, указывающий на то, что зонд 3 находится теперь в надлежащем рабочем положении.
На фиг. 7б показано состояние, в котором расстояние от дистального конца 14, или от электрода 22, зонда 3 до дистального конца 8 эндоскопа 2 меньше надлежащего расстояния. Это состояние может иметь место либо при вводе зонда 3 в рабочий канал 7 при подготовке к АПК-коагуляции или иному эндоскопическому воздействию или исследованию, либо во время работы, если оператор, например по недосмотру, по меньшей мере частично втянул зонд 3 обратно в рабочий канал 7. В этом случае трубка 6 эндоскопа 2 закрывает по меньшей мере один участок наружной поверхности 54 стеклянного стержня 53, в результате чего стеклянным стержнем 53 захватывается и вводится в световод 28 меньшее количество света. Устройство 36, 36` обработки данных распознает уменьшенную интенсивность поступающего света и в этом случае может, например, инициировать или сохранить блокировку активации во избежание повреждения эндоскопа 2 или его компонентов при зажигании плазменного разряда ввиду близости электрода 22 к концу эндоскопа.
Раскрыт хирургический зонд 3, вводимый в рабочий канал 7 эндоскопа 2 и помещающийся в нем с возможностью перемещения. Предложено устройство 27 для определения положения зонда 3 относительно эндоскопа 2, выполненное таким образом, чтобы оптически определять достижение дистального конца 8 рабочего канала 7 дистальным концом 8 зонда 3 оптического определения. Устройство 27 определения положения содержит световод 28, закрепленный на зонде 3 и выполненный с возможностью поступления в него света, окружающего зонд 3 у его дистального конца 14, и посредством поступающего в световод 28 света способно определять положение световода 28, а значит и зонда 3, относительно эндоскопа 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭНДОСКОП С ПОВОРОТНОЙ ПРИЗМОЙ | 2009 |
|
RU2538626C2 |
| УСТРОЙСТВО ДЛЯ ПОИСКА ДЕФЕКТОВ НА ДЕТАЛЯХ ПОСРЕДСТВОМ ЭНДОСКОПИИ | 2012 |
|
RU2598157C2 |
| УСТРОЙСТВО ДЛЯ КОАГУЛЯЦИИ БИОЛОГИЧЕСКОЙ ТКАНИ | 2020 |
|
RU2813711C2 |
| ЭЛЕКТРОХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ ДОСТАВКИ РАДИОЧАСТОТНОЙ (РЧ) И/ИЛИ МИКРОВОЛНОВОЙ ЭНЕРГИИ В БИОЛОГИЧЕСКУЮ ТКАНЬ | 2019 |
|
RU2776771C1 |
| ИНСТРУМЕНТ ДЛЯ ТЕРМИЧЕСКОГО ВОЗДЕЙСТВИЯ НА БИОЛОГИЧЕСКУЮ ТКАНЬ | 2020 |
|
RU2816635C2 |
| КАТЕТЕР ДЛЯ ДЕСТРУКЦИИ С ОПТИЧЕСКИ ПРОЗРАЧНОЙ ЭЛЕКТРОПРОВОДЯЩЕЙ ГОЛОВКОЙ | 2008 |
|
RU2473319C2 |
| УСТРОЙСТВО, СИСТЕМА И СПОСОБ ОБРАБОТКИ ЗУБОВ | 2006 |
|
RU2407478C2 |
| Катетер для абляции биологической ткани | 2019 |
|
RU2816632C2 |
| ВИДЕОЛАПАРОСКОП | 2001 |
|
RU2208375C2 |
| ОПТИЧЕСКАЯ СИСТЕМА ЭНДОСКОПА | 2007 |
|
RU2337606C1 |



Изобретение относится к медицине. Зонд для коагуляции биологической ткани посредством ввода в рабочий канал эндоскопа содержит трубку, выполненную в виде гибкого рукава из неэлектропроводного материала с возможностью подачи через рукав инертного газа, электрод, расположенный на дистальном конце трубки и питаемый высокочастотным током для ионизации газа, устройство для определения положения зонда относительно эндоскопа, причем устройство определения положения содержит световод, закрепленный на зонде и выполненный с возможностью поступления в него света, окружающего зонд у его дистального конца, и посредством поступающего в световод света способно определять положение зонда относительно эндоскопа. Техническим результатом заявленного изобретения является создание хирургического инструмента для ввода в рабочий канал эндоскопа с возможностью перемещения указанного рабочего инструмента в рабочем канале эндоскопа, чтобы исключить или, по меньшей мере, сильно уменьшить тепловое воздействие на дистальный конец эндоскопа, загрязнение оптического волокна и/или опасность для пациента или пользователя. 16 з.п. ф-лы, 7 ил.
1. Зонд (3) для коагуляции биологической ткани посредством ввода в рабочий канал (7) эндоскопа (2), содержащий:
- трубку (23), выполненную в виде гибкого рукава из неэлектропроводного материала с возможностью подачи через рукав инертного газа,
- электрод (22), расположенный на дистальном конце (14) трубки (23) и питаемый высокочастотным током для ионизации газа,
- устройство (27) для определения положения зонда (3) относительно эндоскопа (2), причем устройство (27) определения положения содержит световод (28), закрепленный на зонде (3) и выполненный с возможностью поступления в него света, окружающего зонд (3) у его дистального конца (14), и посредством поступающего в световод (28) света способно определять положение зонда (3) относительно эндоскопа (2).
2. Зонд (3) по п. 1, в котором световод (28) содержит оптическое волокно, в частности стекловолокно или оптическое волокно на основе синтетического материала, закрепленное на зонде (3) таким образом, что при вводе зонда (3) в рабочий канал (7) эндоскопа (2) оно входит в рабочий канал и перемещается в нем вместе с зондом.
3. Зонд (3) по п. 1 или 2, в котором световод (28) проходит от места, находящегося у дистального конца (14) зонда (3), до проксимального конца (16) зонда (3) для передачи поступающего в световод (28) света к проксимальному концу (16) зонда (3) для оценки этого света.
4. Зонд (3) по одному из предыдущих пунктов, содержащий трубку (23), причем устройство (27) определения положения имеет поверхность (33, 52, 54) ввода света, расположенную на наружной стороне трубки (23) и выполненную с возможностью бокового захвата света, окружающего дистальный конец (14) зонда (3).
5. Зонд (3) по п. 4, в котором поверхность ввода света образована торцевой поверхностью (33) световода (28), выведенной из трубки (23) вбок, причем световод (28) проходит в основном внутри трубки (23) вдоль ее продольной протяженности.
6. Зонд (3) по п. 4, в котором поверхность ввода света образована скошенной торцевой поверхностью (52) световода (28), причем световод (28) закреплен на наружной стороне трубки (23) и проходит вдоль ее продольной протяженности.
7. Зонд (3) по п. 4, в котором поверхность ввода света образована наружной поверхностью (54) продолговатого стеклянного стержня (53), расположенного на наружной стороне трубки (23) таким образом, что он своей продольной протяженностью ориентирован в продольном направлении зонда (3), а его торец (56), обращенный от дистального конца (14) зонда (3), связан со световодом (28).
8. Зонд (3) по одному из предыдущих пунктов, также содержащий устройство (36, 36') обработки данных, подключенное к проксимальному концу (13) зонда (3) и выполненное с возможностью приема и оценки поступающего в световод (28) света.
9. Зонд (3) по п. 8, в котором устройство (36) обработки данных содержит оптический спектрометрический узел (37), выполненный с возможностью разделения поступающего света на его спектральные составляющие.
10. Зонд (3) по п. 9, в котором устройство (36) обработки данных содержит узел (41) анализа спектра, выполненный таким образом, чтобы сравнивать интенсивность света, полученную в определенном диапазоне световых частот или на определенных дискретных частотах, с хранящимися в памяти эталонными спектрами и на основании этого сравнения идентифицировать поступающий в световод (28) свет, причем узел (41) анализа спектра предпочтительно выполнен с возможностью проведения различия, по меньшей мере, между окружающим светом в лечебном помещении, темнотой и рабочим светом из эндоскопа (2).
11. Зонд (3) по одному из пп. 8-10, в котором устройство (36) обработки данных содержит детекторный узел (43), выполненный таким образом, чтобы при вводе зонда (3) в рабочий канал (7) распознавать ситуации, когда поверхность (33, 52, 54) ввода света обращена в окружающее пространство лечебного помещения, когда она входит из окружающего пространства в рабочий канал (7) или когда она выходит из рабочего канала (7) в подвергаемую воздействию область организма, и на этом основании генерировать соответствующие сигналы определения положения.
12. Зонд (3) по п. 8, в котором устройство (36') обработки данных содержит детекторное устройство (40, 43'), выполненное таким образом, чтобы определять, поступает ли или не поступает в световод (28) свет минимальной интенсивности, и на этом основании генерировать соответствующие сигналы определения положения.
13. Зонд (3) по п. 11 или 12, в котором устройство (36, 36') обработки данных встроено в соединитель (15), расположенный на проксимальном конце (16) зонда (3) и предусмотренный для подключения к внешнему блоку (4) управления.
14. Зонд (3) по одному из пп. 11-13, в котором устройство (36, 36') обработки данных является соединяемым с устройством (4) управления для зонда (3) и/или эндоскопа (2), выполненным таким образом, чтобы на основании сигналов определения положения автоматически реализовывать по меньшей мере одну из следующих мер: разрешение и блокирование активации подаваемого через зонд (3) электрического сигнала или прохождение через зонд (3) газового потока, параметризация и/или управление работой зонда (3) и/или эндоскопа (2) в рабочем положении.
15. Зонд (3) по одному из предыдущих пунктов, в котором гибкий рукав выполнен из политетрафторэтилена.
16. Зонд (3) по одному из предыдущих пунктов, в котором инертным газом является аргон.
17. Зонд (3) по одному из предыдущих пунктов, в котором для питания высокочастотным током электрод (22) соединен с соединительной линией (19).
| US 2010179417 A1, 15.07.2010 | |||
| КОМПОНОВКА ДАТЧИКА ДЛЯ СИСТЕМЫ ОПРЕДЕЛЕНИЯ АБСОЛЮТНОГО ПОЛОЖЕНИЯ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2014 |
|
RU2684021C2 |
| US 2010152538 A1, 17.06.2010 | |||
| US 2019142523 A1, 16.05.2019 | |||
| DE 19731931 A1, 11.02.1999. | |||

