Область техники
Изобретение относится к сетям беспроводной связи (H04W) разнесенных систем (H04B 7/02) аэродромного (B64F 1/00) наблюдения, конкретно к сети беспроводной связи для аэродромной многопозиционной системы наблюдения (АМПСН) центра обслуживания воздушного движения (ЦОВД).
Уровень техники
Известны сети беспроводной связи (Сергей Сергеев, Святослав Скварник «О беспроводном широкополосном доступе», журнал «Воздушно-космическая оборона», 17.09.2014; Леонид Невдяев «CDMA: Гибридные технологии доступа», «Технология», 16.07.2000, osp.ru; ПАО «НПО «Алмаз» /Konkursnaya-rabota-AMPSN-Tetra.pdf, 2020, www.aviationunion.ru/; «МПСН. Назначение, основные сведения, размещение на а/д. Типы. Характеристики», МПСН «Мера», ВНИИРА, studfile.net; «InfiMAN 2x2 - Продукция - Infinet Wireless», infinet.ru; RU 2633380; RU 2634502; RU 2697504; RU 2710983; CN 115379483; EP 4092926; US 2022376849; AU 2019275577).
Известные сети беспроводной связи (СБС) выполнены по топологии «точка-многоточка» с возможностью беспроводной передачи в цифровом формате данных от средств разнесенного наблюдения АМПСН. Для этого СБС АМПСН содержит приемо-передающую базовую станцию (БС), установленную в центре сети, а на концах её – оконечные приемо-передающие абонентские станции (АС), разнесенные по территории аэродрома и соединенные с БС радиолиниями связи беспроводного широкополосного доступа (БШД) для передачи в цифровом формате данных средств разнесенного наблюдения на ЦОВД АМПСН.
В известных технических решениях СБС для АМСН не решена проблема достаточной точности синхронизации работы БС и АС в аэродромной БШД. Это связано с естественной нестабильностью моментов излучений радиосигналов, а также наличием повышенного уровня радио и взаимных помех в аэродромной БШД. Такая нестабильность аэродромной БШД приводит к потерям временных кадров, несущих информацию наблюдения от АС к БС. Потеря информационных кадров, в свою очередь, приводит к необходимости их переповтора и увеличению задержки приёма и передачи информации от приёмных станций (ПРС) АМПСН к серверам обработки. Однако увеличение задержки приёма и передачи информации приводит к увеличению времени обработки сигналов на серверах АМПСН и снижению точности измерения координат воздушного судна (ВС), поскольку за время обработки сигналов реальное местонахождение ВС не будет совпадать с расчетным значением. Кроме того, в известных СБС для АМПСН не учитывается геометрия комплексного размещения базовых станций СБС по секторам на командном диспетчерском пункте в совокупности с устройством синхронизации. Что дополнительно приводит к задержке измерений, снижению точности измерения координат воздушных судов (ВС) АМПСН, и в итоге к возможности столкновений ВС на аэродроме и в воздухе.
Желательно решение указанной проблемы и создание СБС для АМПСН, лишенной указанных выше недостатков.
В настоящее время таких СБС для АМПСН в известном уровне техники не выявлено.
Постановка задачи изобретения
Задачей изобретения является решение проблемы сокращения времени доставки достоверной информации к серверам обработки не хуже времени и качества доставки по волоконно-оптическим линиям связи (ВОЛС).
Технический результат – создание СБС, обеспечивающей снижение вероятности столкновений на аэродроме и в воздухе воздушных судов (ВС), и расширение арсенала СБС для АМПСН.
Сущность изобретения
Решение поставленной задачи и достижение заявленного технического результата обеспечивается тем, что сеть беспроводной связи (СБС) для аэродромной многопозиционной системы наблюдения (АМПСН) содержит не менее четырёх приемо-передающих базовых станций БС с общим азимутальным полем обзора 360°, а в угломестной плоскости от 8° до 10°, при этом в поле видимости каждого сектора БС размещено от четырех до восьми приемопередающих абонентских станций АС. БС и соответствующие АС соединены между собой по информационным сигналам линиями беспроводного широкополосного доступа (БШД). При этом БС по тактовым опорным сигналам соединены с синхронизатором, а по управляющим и сигнальным входам/выходам - через коммутатор связи с персональным компьютером (ПК) настройки сети и с электрической шиной подключения оборудования командно-диспетчерского пункта (КДП) центра обслуживания воздушного движения (ЦОВД). Все БС установлены на мачтовой площадке, расположенной на крыше КДП или на выносной башне, а АС установлены на отдельных мачтах, разнесенных и топографически привязанных к территории аэродрома вне его посадочных полос, и снабжены интерфейсными шинами для подключения соответствующих средств аэродромной многопозиционной системы наблюдения (АМПСН). Линии БШД между БС и АС выполнены в виде радиолиний связи с цифровой модуляцией связных радиосигналов по технологии ортогонального частотного разделения с мультиплексированием (ОЧРМ), и объединены в единую сеть СБС «точка-многоточка» на программируемых логических интегральных схемах (ПЛИС) связи. Для соединения с приёмными станциями (ПРС) АМПСН оконечные станции АС СБС оснащены портом модуля Ethernet и соединительным кабелем проводной связи, типа витая пара категории 5e. Для соединения базовых станции (БС) с командно-диспетчерским пунктом (КДП) центра обслуживания воздушного движения (ЦОВД) предлагаемая СБС АМПСН оснащена портом модуля Ethernet и соединительным кабелем проводной связи, типа витая пара категории 5e, оптическим портом (ОП), соединительным кабелем типа одномодовое оптоволокно и коммутатором. Соединение выполнено через коммутатор к шине подключения сетевого оборудования КДП ЦОВД. Устройство синхронизации (УС) СБС выполнено с возможностью синхронизации единого времени для всех базовых станций и находящихся в каждом их секторе абонентских станций, с возможностью двойного сокращения радиочастотных линий связи и с возможностью позиционирования устройства и базовых станций. Для этого УС содержит установленные на интерфейсной шине сопряжения генератор тактовых импульсов, плату синхронизации и приемник глобальных навигационных спутниковых систем (ГНСС). Причем выходы тактового генератора и приемника ГНСС через электронный коммутатор соединены с шиной подключения приемо-передающих устройств БС.
Обоснование новых признаков (новелл) и свойств заявленной СБС с техническим результатом
Новелла 1. Снабжение сети беспроводной связи (СБС) не менее, чем четырьмя приемо-передающими базовыми станциями (БС), установленными на мачте в геометрии комплексного размещения по секторам, с общим азимутальным полем обзора 360°, а в угловой плоскости - от 8° до 10°, а также установка в каждом секторе БС от четырех до восьми приемопередающих абонентских станций (АС), соединенных с соответствующими ПРС АМПСН, позволяют создать сплошное поле наблюдения и, как следствие, снизить вероятность столкновений на аэродроме и в воздухе воздушных судов (ВС).
Новелла 2. Топографическая привязка и территориальное разнесение АС совместно с ПРС по аэродрому в оптимальной геометрии учтённых расстояний (Дас) каждой АС от соответствующей БС, позволило рассчитывать суммарную временную задержку (Т зад) в каждой радиолинии СБС АМПСН из условия (1):
Тзад = Тпвс + Тпер + Тск),
Тпер = Дас / С, тогда,
Тзад = Тпвс + (Дас / С) + Тск), (1),
где:
Тпвс - время передачи принятого ПРС сигнала воздушного судна (ВС);
Тпер - время передачи этого сигнала от АС на БС;
Тск - время передачи сигнала от БС на сервер концентратор АМПСН;
Дас – дальность от АС до БС;
С - скорость распространения радиоволн в воздушном пространстве, 3*108 м/с.
В свою очередь, знание величины Т зад в СБС АМПСН позволило использовать её в качестве эталонного значения для оценки достоверности пакетов информации, поступивших от АС к БС и отбраковывать пакеты сигнальной информации, не совпадающие с эталонным значением задержки. Такая фильтрация впервые позволила исключить радио и взаимные помехи и создать в радиодиапазоне СБС, которая по достоверности и качеству доставки пакетов информации от АС к БС не хуже волоконно-оптическим линиям связи (ВОЛС).
Новелла 3. Увеличение количества АС совместно с ПРС позволяет создать множество измерительных баз и повысить надёжность СБС, достоверность доставки данных, точность измерения разностно-дальномерным методом не только текущего местоположения воздушных судов, но и направление их движения, скорости и ускорения перемещения во время полета, при взлете и посадке, во время руления и стоянки. Повышение точности измерений в, свою очередь, позволило безопасно контролировать перемещение транспортных средств, находящихся на взлётно-посадочной полосе, рулежных дорожках, стоянках и перроне, оборудованных ответчиками вторичной радиолокации и аппаратурой автоматического зависимого наблюдения вещательного (АЗН-В) в режиме 1090 ЕS.
Новелла 4. Одновременно выполнение линий БШД между БС и АС в виде радиолиний связи с цифровой модуляцией связных радиосигналов по технологии ортогонального частотного разделения с мультиплексированием (ОЧРМ) и объединение их в единую сеть БШД на аппаратной платформе связи «точка-многоточка» типа программируемая логическая интегральная схема (ПЛИС), с её подключением к АМПСН по кабелю типа витая пара категории 5e, через модуль типа Ethernet и/или по кабелю типа одномодовое оптоволокно через модуль типа оптический порт (ОП), позволили обеспечить требуемую точность и скорость передачи данных для реализации радиоприёма с разнесённых позиций и, тем самым, повысить надежность связи в СБС АМПСН.
Новелла 5. Снабжение базовых станций (БС) соединительным кабелем проводной связи, типа витая пара с модулем Ethernet порта и соединительным кабелем волоконно-оптической связи (ВОЛС) с модулем оптического порта (ОП), а абонентских станций (АС) соединительным кабелем проводной связи, типа витая пара с модулем Ethernet порта, позволило организовать радиолинии между БС и АС, и использовать приемные станции (ПРС), другие стандартные средства для аэродромного наблюдения в АМПСН, что в свою очередь решило проблему согласования и привязки предложенной СБС к существующим АМПСН без доработки их средств наблюдения.
Новелла 6. Введение устройства синхронизации (УС) и установка на его интерфейсной шине сопряжения генератора тактовых импульсов, платы синхронизации, и приемника глобальных навигационных спутниковых систем (ГНСС), соединение тактового генератора и приемника ГНСС через электронный коммутатор с шиной подключения приемо-передающих устройств БС позволило синхронизировать в масштабе единого времени работу всех базовых станций и находящихся в каждом их секторе абонентских станций. Одновременно соединение УС с управляющим компьютером через порт синхронизации (ПС) БС, и далее через коммутатор СБС, обеспечило возможность управления двойным сокращением радиочастотных линий связи и позиционирования БС и АС. Синхронизация БС и АС позволила уменьшить ошибки передачи данных средств разнесенного наблюдения АМПСН на КДП ЦОВД, включая сигналы ответчиков вторичной радиолокации (ВРЛ) летательных аппаратов, а также сигналы передвижных радиомаяков, работающих в системе автоматического зависимого наблюдения вещательного (АЗН-В) в режиме 1090 ЕS и устанавливаемых на транспортные средства и стационарные объекты аэродрома.
Новелла 7. Позиционирование БС и АС с помощью устройства синхронизации и персонального компьютера решило проблему независимой оперативной топографической привязки АС и БС к местности в зоне ответственности АМПСН.
В целом указанные технические преимущества позволили создать СБС для АМПСН и решить проблему снижения времени доставки достоверной информации наблюдения, живучести и оперативного развертывания её на аэродромах. При этом расширяется арсенал СБС для АМПСН и достигается заявленный технический результат.
Сущность изобретения поясняется чертежами, представленными на фиг. 1 – фиг. 10.
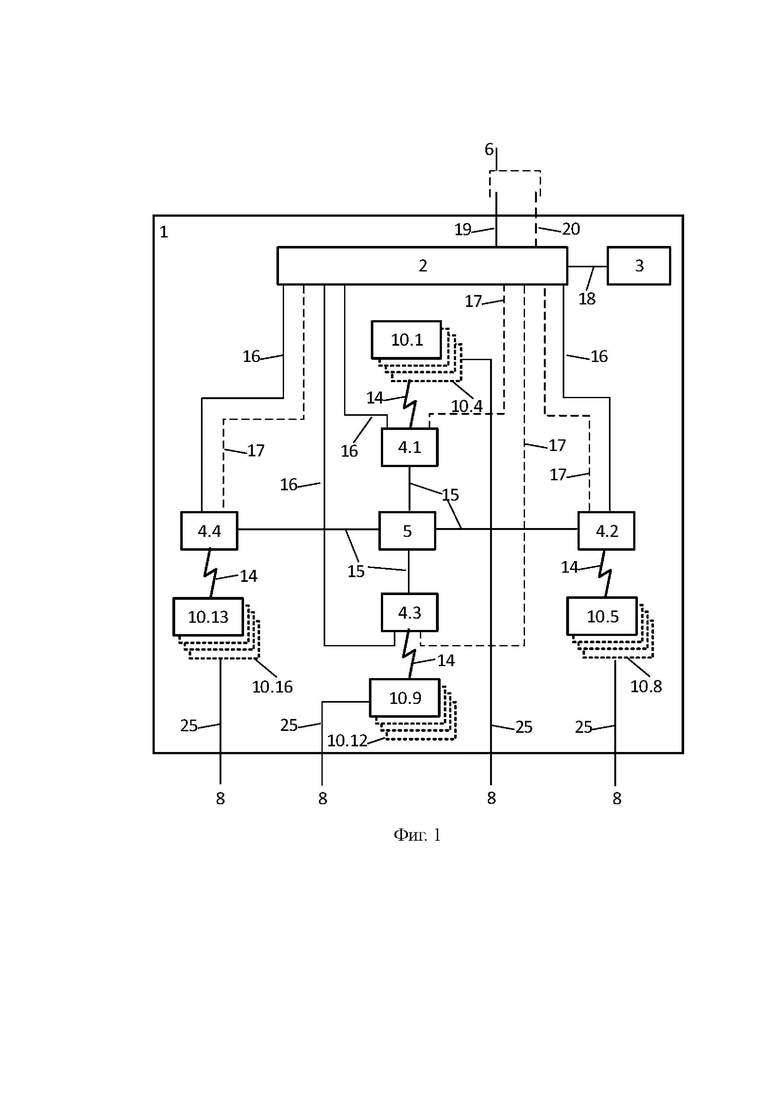
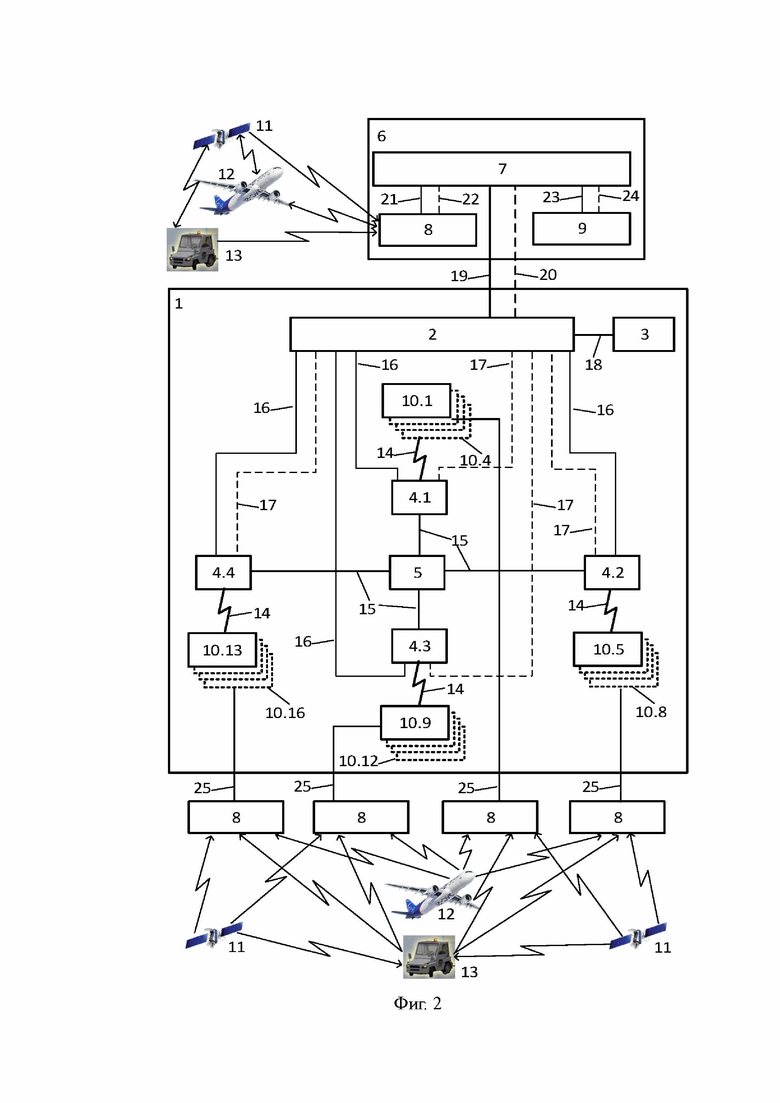
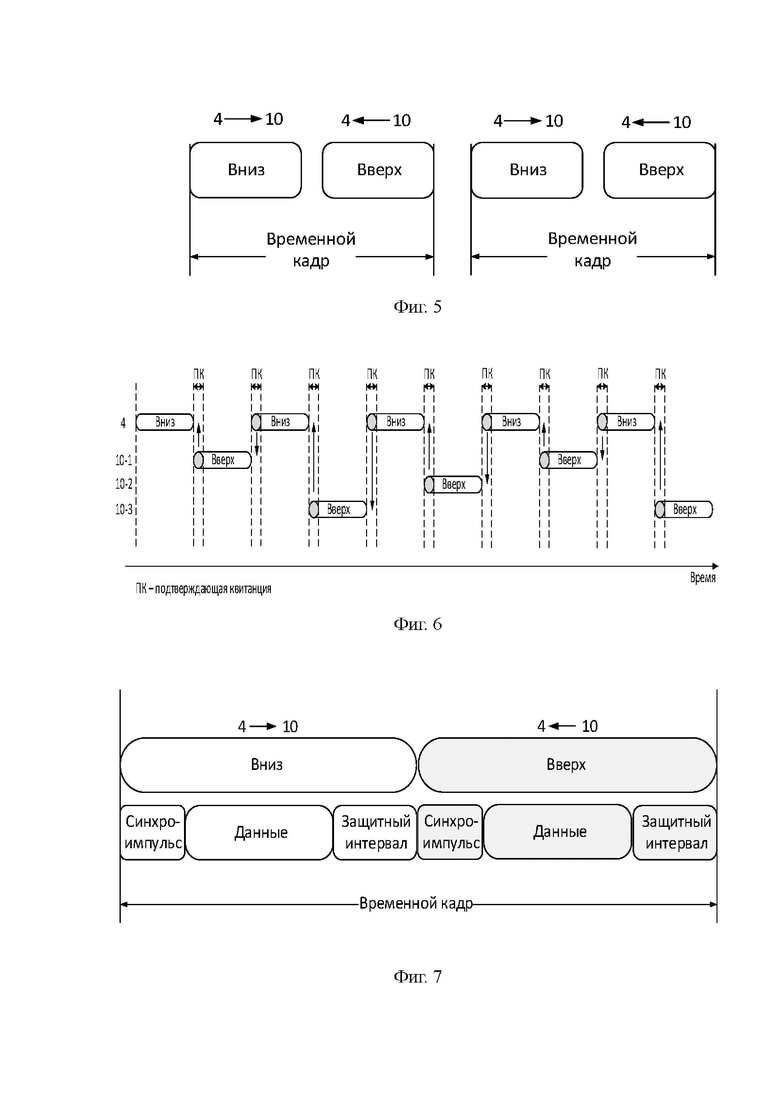
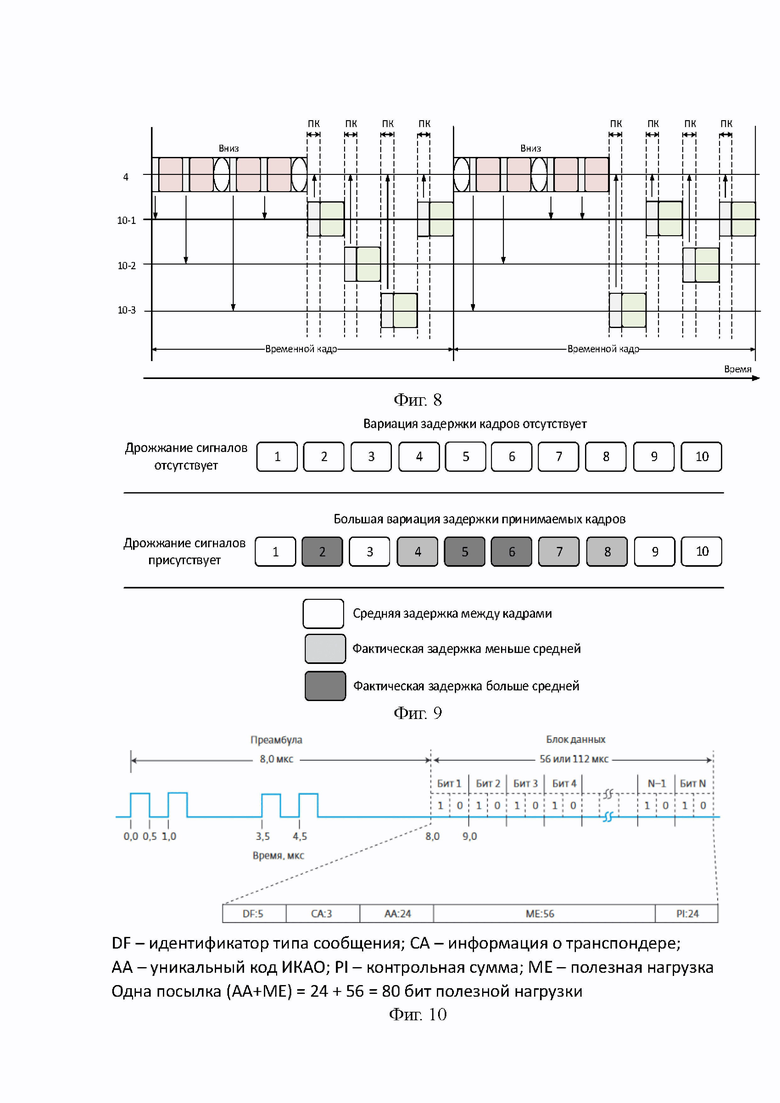
На фиг. 1 представлена функциональная схема СБС для АМПСН, на фиг. 2 – рисунок, поясняющий конструктивное расположение СБС в АМПСН, на фиг. 3 – функциональная схема синхронизатора СБС, на фиг. 4 – рисунок, поясняющий принцип разностно-дальномерного способа измерения координат воздушных судов и наземного транспорта в заявленной СБС, на фиг. 5 – рисунок, поясняющий принцип передачи данных на основе временного разделения несущей частоты на временные интервалы «слоты», на фиг 6 – рисунок, поясняющий принцип временного разделения несущих слотов для трех АС, на фиг. 7 – рисунок, поясняющий структуру временного кадра пакета данных, на фиг. 8 – рисунок, поясняющий принцип передачи данных в секторе БС с временным разделением несущих слотов (вниз) для 3-х АС и несущих слотов в обратном направлении от 3-х АС к БС (вверх), помещённых в одном временном кадре, на фиг. 9 – рисунок, поясняющий фазовое дрожание цифрового сигнала данных при тестировании скорости передачи данных с временным разделением частот, на фиг. 10 – пример цифровых данных передаваемых в СБС с ПРС АМПСН от одного объекта.
На фиг. 1-10 цифрами обозначены:
1 – сеть беспроводной связи (СБС) для аэродромной многопозиционной системы наблюдения (АМПСН 8) центра обслуживания воздушного движения (ЦОВД);
2 – коммутатор СБС 1;
3 – персональный компьютер СБС 1;
4 – базовые станции (БС) СБС 1:
4.1, 4.2, 4,3, 4.4 – первая, вторая, третья и четвертая БС соответственно
5 – устройство синхронизации (УС) СБС 1;
6 - командно-диспетчерский пункт центра обслуживания воздушного движения (КДП ЦОВД);
7 – сетевое оборудование ЦОВД;
8 – аэродромная многопозиционная система наблюдения (АМПСН);
9 – комплекс средств автоматизации управления воздушным движением (КСА УВД);
10 – абонентские станции (АС) СБС 1;
10.1, 10.2, …, 10.16 – первая, вторая, …, и шестнадцатая АС соответственно;
11 – глобальная навигационная спутниковая система (ГНСС)
12 – воздушное судно (ВС);
13 – транспортные средства и стационарные объекты аэродрома (ТС и СО), с установленными на них радиомаяками, работающими в системе автоматического зависимого наблюдения вещательного (АЗН-В) в режиме 1090 ЕS;
14 –– радиолинии связи между БС 4 и АС 10 СБС 1;
15 – кабели проводной связи между УС 5 и БС 4;
16 – кабели проводной связи между БС 4 и коммутатором 2 СБС 1;
17 – кабели оптико-волоконной связи между БС 4 и коммутатором 2 СБС 1;
18 – кабель проводной связи между ПК 3 и коммутатором 2 СБС 1;
19 – кабели проводной связи между коммутатором 2 СБС 1 и сетевым оборудованием ЦОВД 7;
20 – кабели оптико-волоконной связи между коммутатором 2 СБС 1 и сетевым оборудованием ЦОВД 7;
21 – кабели проводной связи между АМПСН 8 и сетевым оборудованием ЦОВД;
22 – кабели оптико-волоконной связи между коммутатором 2 СБС 1 и сетевым оборудованием ЦОВД 7;
23 – кабели проводной связи между сетевым оборудованием ЦОВД 7 и КСА УВД;
24 – кабели оптико-волоконной связи между сетевым оборудованием ЦОВД 7 и КСА УВД 9;
25 – кабели проводной связи между АМПСН 8 и разнесёнными АС 10 СБС 1;
26 – выносная башня с антенной площадкой для установки БС 4.
Раскрытие сущности изобретения
Сущность изобретения раскрыта на примере конструкции СБС 1, представленной на фиг. 1. Согласно фиг. 1 СБС 1 для АМПСН 8 содержит четыре приемо-передающие базовые станции (БС) 4, установленные на крыше КДП ЦОВД 6 или на отдельной выносной башне с антенной площадкой 26, образуя общее круговое поле СБС 1, состоящее из четырех секторов для обеспечения АМПСН 8. Каждый сектор БС 4 в азимутальной плоскости имеет размеры не менее 90°, а в вертикальной плоскости не менее 8°. В зависимости от количества ПРС АМПСН 8, определяемое размерами лётного поля, в том числе длиной посадочных полос аэродрома, и в соответствующей геометрии размещения, определяются направления сектора каждой БС 4 с таким расчётом, чтобы в секторе находилось не менее 4-х ПРС АМПСН 8 совместно с 4-мя приемопередающими абонентскими станциями (АС) 10. Для обеспечения видимости АС 10 установлены на мачтах соответствующей высоты. Мачты с ПРС АМПСН 8, совместно с АС 10, разнесенные по территории аэродрома, образуют измерительную базу (фиг. 3) для определения разностно-дальномерным методом текущих координат воздушных судов, а также транспортных средств и стационарных объектов аэродрома (ТС и СО), с установленными на них радиомаяками, работающими в системе автоматического зависимого наблюдения вещательного (АЗН-В) в режиме 1090 ЕS 13. Под текущими координатами в данном изобретении понимаются пространственное положение объектов аэродромного наблюдения, направления их движения, скорости и ускорения перемещения, в том числе во время полета, при взлете и посадке, во время руления и стоянки воздушных судов.
АС 10 каждого сектора СБС 1 соединены по информационным сигналам радиолиниями связи 14 беспроводного широкополосного доступа (БШД) с соответствующей БС 4. Каждая БС 4 по тактовым опорным сигналам соединена с устройством синхронизации 5 по кабелю проводной связи 15 равной длины, а по управляющим и сигнальным входам/выходам по кабелю проводной связи 16 и/или кабелю оптико-волоконной связи 17, с коммутатором 2, далее по кабелю проводной связи 18 с персональным компьютером (ПК) 3 настройки сети, и через коммутатор 2 по кабелю проводной связи 19 и/или кабелю оптико-волоконной связи 20 с сетевым оборудованием ЦОВД 7 подключения оборудования КДП ЦОВД 6, далее по кабелю проводной связи 21 и/или кабелю оптико-волоконной связи 22 с АМПСН . Линии 14 БШД между БС 4 и АС 10 выполнены в виде радиолиний связи с цифровой модуляцией связных радиосигналов по технологии ортогонального частотного разделения с мультиплексированием (ОЧРМ), и объединены в единую сеть БШД на аппаратной платформе связи «точка-многоточка» типа программируемая логическая интегральная схема (ПЛИС). Каждая ПЛИС сети БШД подключена к соответствующему АМПСН 8 по кабелю типа витая пара категории 5e, через модуль типа Ethernet и/или по кабелю типа одномодовое оптоволокно через модуль типа оптический порт (ОП). Абонентские станции 10 БШД выполнены на аппаратной платформе связи «точка-многоточка» типа ПЛИС с её подключением к соответствующему АМПСН 8 по кабелю типа витая пара категории 5e, через модуль типа Ethernet. Устройство синхронизации (УС) 5 выполнено с возможностью синхронизации единого времени для всех базовых станций 4 и, находящихся в каждом их секторе абонентских станций 10, с возможностью оперативного управления количеством радиолиний 14 связи и с возможностью позиционирования базовых 4 и абонентских станций 10 СБС 1. Для этого УС 5 содержит установленные на интерфейсной шине сопряжения генератор 5.1 тактовых импульсов, приемник 5.2 глобальных навигационных спутниковых систем (ГНСС) и плату 5.3 синхронизации. Выходы тактового генератора 5.1 и приемника 5.2 ГНСС через электронный коммутатор 5.4 соединены с шиной подключения приемо-передающих устройств БС 4, и далее кабелем проводной связи 15, типа витая пара через порт синхронизации (ПС) к БС 4.
Каждая приёмо-передающая БС 4 выполнена на аппаратной платформе типа ПЛИС и имеет в составе программируемый логический контроллер (на фигурах не показан) с программным разделением несущей частоты на временные интервалы «слоты» (фиг. 5) постоянной длительности по технологии (фиг. 6-10) множественного доступа с временным разделением (МДВР). Вводно-выводное устройство контроллера содержит три интерфейсных порта - модульные компактные приёмопередатчики (трансиверы), включая оптический порт (ОП), для подключения кабеля типа одномодовое оптоволокно 17 к аналогичному ОП коммутатора, порт синхронизации (ПС) для подключения проводного кабеля 15 типа витая пара категории 5e к устройству синхронизации и порт Ethernet (ПЕ) для подключения проводного кабеля 16, типа витая пара категории 5e к аналогичному порту коммутатора 2 СБС 1.
Все приёмо-передающие абонентские станции 10 выполнены на аппаратной платформе типа ПЛИС и имеют в составе программируемый логический контроллер с программным разделением несущей частоты на временные интервалы «слоты» постоянной длительности по технологии МДВР (фиг.6 -10). Вводно-выводное устройство контроллера содержит один интерфейсный порт Ethernet (ПЕ) для подключения проводного кабеля 25, типа витая пара категории 5e к аналогичному порту АМПСН 8.
Работа СБС
Перед началом работы СБС 1 (фиг. 1) в составе АМПСН 8 (фиг. 2) производят её развертывание и настройку. Для этого на крыше КДП ЦОВД 6 или на выносной башне с антенной площадкой 26 устанавливают четыре базовые станции БС 4 и ориентируют их в соответствующем секторе обзора, формируя круговое поле СБС 1 для АМПСН 8. Одновременно на территории аэродрома на вышках устанавливают абонентские станции АС 10.1, …, АС 10.16, например, по четыре штуки в каждом секторе обзора соответствующих БС 4. Далее БС 4.1, …, БС4.4 проводными каналами связи связывают с аппаратурой КДП ЦОВД 6, в том числе с АМПСН 8, а разнесённые АС 10.1, …, АС 10.16 – с соответствующими конечными средствами наблюдения АМПСН 8 по кабелям проводной связи 23. После этого проводят настройку СБС 1. Для этого дежурный диспетчер АМПСН 8 включает электропитание СБС 1 и с помощью персонального компьютера (ПК) 3 включает функциональный контроль и тестирование оборудования СБС 1. При этом производится проверка, внесённых в память ПК 3, БС 4, АС 10, установленных данных геофизического положения БС 4.1, …, БС4.4, разнесенных АС 10.1, …, АС 10.16, и расстояний между ними (Д ас) – база измерений задержки прохождения радиосигналов от АС 10 до БС 4. Далее диспетчер назначает с помощью ПК 3 каждой БС 4.1, …, БС4.4 рабочие частоты или две частоты на противоположные сектора БС 4 и включает тестовый контроль СБС 1. Сначала проверяется целостность всех линий связи внутри СБС 1 и внешних соединений с АМПСН 8 по линиям связи 18, 17, 16, 14, 25 и 18, 19, 20, 21, 22 путём подачи тестовой команды и получения ответа на ПК 3, далее работа устройства синхронизации 5 методом получения тестового сообщения на ПК 3 через БС 4 по линиям связи 15, 16, 17, 18, о работе тактового генератора, и приёмного тракта модуля ГНСС 11. Далее ПК 3 формирует контрольные пакеты данных, представленные на фиг. 6 - 10, выполняет их обмен по линиям связи 18, 14, 16, 17, 19, 20, 21, 22, 25 и результаты обмена сравнивает с их контрольными значениями. Каждый сеанс передачи данных по технологии МДВР исполнительная программа делит на два потока временных кадров от одного устройства, например, от БС 4 к АС 10, и в обратном направлении (фиг. 5). Каждый временной кадр имеет одинаковый размер, который определяется временем передачи (например, 10 мс), а также зависит от ширины канала, схемы модуляции и других параметров. Периодически, по определённому алгоритму, каждому устройству выделяется один временной кадр для передачи данных. Передача начинается в выделенный момент и осуществляется в течение разрешенного фиксированного отрезка времени. Это правило действует и для служебной информации, квитанций, повторных передач.
Каждый временной кадр (фиг. 5) при настройке БС 4 и АС 10, с ПК 3 ещё разделяется на отдельные временные слоты (вниз – с БС 4 на АС 10) и (вверх с АС 10 на БС 4), в соответствии с заданным в конфигурации соотношением.
При передаче данных, устройство синхронизации (УС) 5 синхронизирует потоки данных с точностью до микросекунды. Затем каждый сеанс связи с БС 4 на АС 10 и обратно с АС 10 на БС 4 происходит в течение временных кадров фиксированной длительности (фиг. 6). Соответственно, каждая АС 10 будет передавать данные БС 4 только во время своего, отведенного базовой станцией, временного кадра. При этом образуется непрерывный байтовый поток данных, который "нарезается" (фиг. 7) на порции подходящего размера по времени, а не по длине – временные кадры. Размер временного кадра фиксирован.
При положительном результате функционального контроля – целостность линий связи подтверждена, отсутствие «дрожания сигналов» и ошибок измерений временных задержек передачи данных, диспетчер включает СБС 1 в режим «Работа».
В режиме «Работа» УС 5 принимает сигналы единого времени от ГНСС 11, синхронизирует внутреннее время со шкалой времени ГНСС 11 (UTC), и одновременно выдаёт опорный синхронизирующий сигнал на все БС4 по проводному кабелю 15. Далее выполняется синхронизация всех АС 10, посредством приёма сигнала синхронизации от своей БС 4 по радиолинии 14. Синхроимпульс содержится во временном кадре (фиг. 7). УС 5 позволяет работать СБС и без использования ГНСС, в этом случае синхроимпульс выдаёт собственный тактовый генератор. При выборе настроек в АМПСН 8 и в СБС 1 используют одинаковую ГНСС этим достигается синхронность всей системы в целом, поэтому информация от ПРС АМПСН 8 (координаты, высота, служебная информация) поступают в СБС 1 с высокой стабильностью по времени UTC. Благодаря этому АС 10 СБС 1 передают данные от ПРС АМПСН 8 на сервера АМПСН 8 практически исключая потери и переповторы информации, что значительно минимизирует задержки, в итоге повышается точность определения текущих координат ВС и наземного транспорта аэродрома. Высокая пропускная способность СБС до 200 мбит/с при 4-х АС в секторе соответствующей БС, минимизация коллизий от взаимных помех БС 4, позволяет подбирать оптимальные временные кадры в пределах от 2 мс до 5 мс, что приблизительно в 10 раз уменьшает задержки по времени передачи данных, заявленных в сертификационных требованиях к АМПСН (100 мс).
Согласно дейтаграмме принимаемая посылка ПРС АМПСН 8 от определяемых объектов составляет по времени 64 мкс или 120 мкс (фиг.10) на скорости 1 бит за 1 мкс. Пропускная способность БС 4 в секторе = 400 мбит/с. При установке в секторе 4-х АС 10 пропускная способность БС 4 (вниз) распределится по 100 мбит/с на каждую АС 10. При этом АС 10 имеет пропускную способность (вверх) 300 мбит/с, учитывая, что в секторе БС 4 есть ещё 3 АС 10, следовательно, пропускная способность (вверх) каждой АС 10 не может превысить те же 100 мбит/с. Таким образом при скорости 100 мбит/с СБС 1 способна только за 1 мкс передать 100 бит, и соответственно 100 бит *120 = 12000 бит = 1500 байт = 1,45 килобайт = 0,0014 мегабайт трафика за 120 мкс, что в 100 раз превышает потребность в передаче сигнала дейтаграммы 120 бит длительностью 120 мкс. С учётом избыточности пропускной способности передачи информации в СБС 1, обработки сигнала и его формирования в дейтаграмму рекомендуется уменьшить временной кадр до 3-5 мс. Уменьшение временного кадра прямо пропорционально уменьшает задержку передачи информации в СБС. Кроме того, избыточность пропускной способности передачи информации в СБС 1, оптимального количества АС в секторе (от 4-х до 8) позволяет для всех АС 10 в секторе БС 4 использовать один временной кадр, т.е. одновременно отправлять и получать данные от всех АС 10 сектора (фиг 8), что значительно снижает задержку передачи информации в СБС 1, при этом средняя задержка составит:
Tзад.ср. = Nас * T вк * 2,5, где:
Nас – количество АС 10 в секторе;
Tвк – размер временного кадра;
2,5 – коэффициент обработки временного кадра.
При 4-х АС в секторе и размере временного кадра 2 мс
Tзад.ср. = 4 * 2 * 2.5 = 20 мс,
т.е. доставка информация при 4-х секторах, с общим количеством АС = 4*4=16, составит не более 20 мс, что в 5 раз менее сертификационных требований.
Принятая, декодированная и сформированная посылка информации, соответствующей ПРС АМПСН 8, поступает в АС 10 СБС 1 по проводной линии 23, далее по радиолинии 14 на соответствующую БС 4, откуда по проводным линиям 16 и/или 17 на коммутатор 2, откуда по проводным линиям 19 и/или 20 на сетевое оборудование КДП ЦОВД 7, откуда по проводным линиям 21 и/или 22 на сервер обработки АМПСН 8, и после обработки через сетевое оборудование КДП ЦОВД 7 в комплекс средств автоматизации управления воздушным движением (КСА УВД) 9. Полученные параметры наблюдения отображаются на встроенных в КСА УВД 9 мониторах.
Представленная конструкция СБС 1 не ограничивается представленным примером его осуществления. В рамках данного изобретения возможны и другие варианты исполнения, не выходящие за пределы первичных материалов заявки. Например, для оперативного развертывания АС 10 и БС 4 СБС 1 на аэродромах, могут быть выполнены в мобильном исполнении и снабжены выдвижными мачтами.
Промышленная применимость
Изобретение разработано на уровне математической модели четырехсекторной СБС 1. Испытание модели СБС 1 показали достижимость заявленного технического результата, заключающегося в создании СБС 1, пригодной для использования в АМПСН 8 типовых аэродромов, и расширение арсенала СБС для АМПСН 8 при одновременном увеличении живучести СБС, надежности работы и повышенной точности измерения координат объектов аэродромного наблюдения.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС СРЕДСТВ УПРАВЛЕНИЯ И СВЯЗИ ДЛЯ АВТОМАТИЗИРОВАННОЙ ПЕРЕДВИЖНОЙ ЕДИНИЦЫ | 2023 |
|
RU2822692C1 |
| СИСТЕМА И СПОСОБ ВЫПОЛНЕНИЯ ОПЕРАЦИИ ПЕРЕДАЧИ ОБСЛУЖИВАНИЯ В СИСТЕМЕ СВЯЗИ ШИРОКОПОЛОСНОГО БЕСПРОВОДНОГО ДОСТУПА | 2004 |
|
RU2305900C2 |
| ПОДВИЖНАЯ АВТОМАТИЗИРОВАННАЯ МАШИНА СВЯЗИ И УПРАВЛЕНИЯ РОБОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2021 |
|
RU2762624C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ КОМАНДНО-ШТАБНАЯ МАШИНА | 2022 |
|
RU2788156C1 |
| ПЕРЕНОСНОЙ МНОГОФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС СВЯЗИ | 2017 |
|
RU2649414C1 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ ПЕРЕДАЧИ ОБСЛУЖИВАНИЯ В ЗАПРОСЕ БАЗОВОЙ СТАНЦИИ В СИСТЕМЕ СВЯЗИ ШИРОКОПОЛОСНОГО БЕСПРОВОДНОГО ДОСТУПА | 2004 |
|
RU2305902C2 |
| МОБИЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС СВЯЗИ | 2020 |
|
RU2749879C1 |
| УСТРОЙСТВО ДЛЯ РАДИОСВЯЗИ | 1993 |
|
RU2146850C1 |
| МОБИЛЬНЫЙ УЗЕЛ СПУТНИКОВОЙ СВЯЗИ | 2007 |
|
RU2342787C1 |
| СИСТЕМА И СПОСОБ ДЛЯ МАССОВОЙ ШИРОКОПОЛОСНОЙ СВЯЗИ | 2002 |
|
RU2305373C2 |

Изобретение относится к области беспроводной связи. Техническим результатом является создание сети беспроводной связи (СБС), обеспечивающей снижение вероятности столкновений на аэродроме и в воздухе воздушных судов (ВС), и расширение арсенала СБС для аэродромной многопозиционной системы наблюдения (АМПСН). Технический результат достигается тем, что СБС выполнена по схеме «точка-многоточка» с рациональным соотношением архитектуры сети, используемых частот и количества базовых (БС) и абонентских (АС) станций, БС ориентированы по секторам, в каждом секторе БС установлено не менее 4 АС, выполняющих радиопередачу данных от приёмных станций (ПРС) АМПСН и разнесенных между собой для измерения координат воздушных судов (ВС) разностно-дальномерным способом; БС соединены с соответствующими АС радиолиниями связи с цифровой модуляцией связных радиосигналов по технологии ортогонального частотного их разделения с мультиплексированием (ОЧРМ); синхронизация пакетов радиообмена данными между АС и БС выполнена в масштабе единого времени как от приемника глобальных навигационных спутниковых систем (ГНСС), так и от собственного тактового генератора при пропадании сигналов ГНСС. 2 з.п. ф-лы, 10 ил.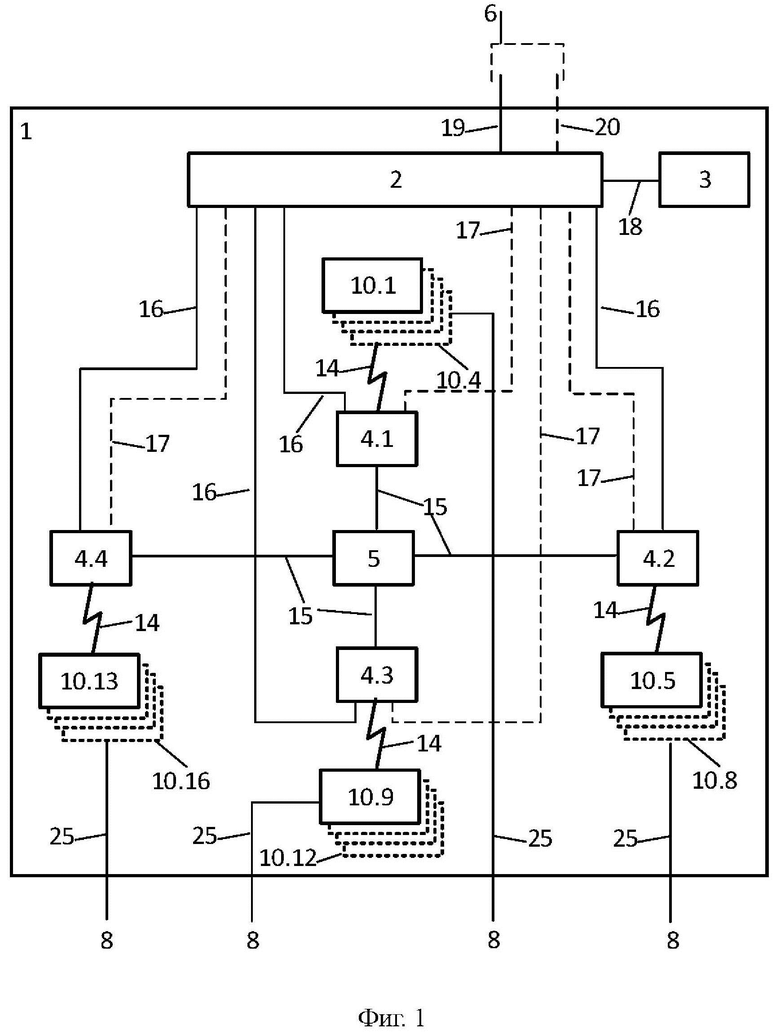
1. Сеть беспроводной связи для аэродромной многопозиционной системы наблюдения, характеризующаяся тем, что она содержит не менее четырёх приемо-передающих базовых станций (БС) с общим полем обзора 360° в азимутальной плоскости, а в угломестной - от 8° до 10°, при этом в поле видимости каждого сектора БС размещено от четырех до восьми приемопередающих абонентских станций (АС), АС и соответствующие БС соединены между собой по информационным сигналам линиями беспроводного широкополосного доступа (БШД), БС по тактовым опорным сигналам соединены с устройством синхронизации (УС), а по управляющим и сигнальным входам/выходам - через коммутатор связи с персональным компьютером (ПК) настройки сети и с шиной подключения сетевого оборудования командно-диспетчерского пункта (КДП) центра обслуживания воздушного движения (ЦОВД), все БС установлены на мачтовой площадке, расположенной на крыше КДП или на выносной башне, а АС установлены на отдельных мачтах, разнесенных и топографически привязанных к территории аэродрома вне его посадочных полос, и снабжены проводными линиями связи для соединения с соответствующими средствами наблюдения (СН) аэродромной многопозиционной системы наблюдения (АМПСН), при этом линии БШД между БС и АС выполнены в виде радиолиний связи с цифровой модуляцией связных радиосигналов по технологии ортогонального частотного разделения с мультиплексированием (ОЧРМ) и объединены в единую сеть беспроводной связи (СБС) «точка-многоточка» с возможностью её подключения к средствам наблюдения (СН) и к КДП ЦОВД АМПСН проводными линиями связи, устройство синхронизации (УС) СБС выполнено с возможностью синхронизации единого времени для всех БС и находящихся в каждом их секторе АС, с возможностью управления количеством радиолиний связи и с возможностью позиционирования АС и БС, для этого УС содержит установленные на интерфейсной шине сопряжения генератор тактовых импульсов, плату синхронизации и приемник глобальных навигационных спутниковых систем (ГНСС), выходы тактового генератора и приемника ГНСС через электронный коммутатор УС соединены с тактовыми входами приемопередающих устройств БС проводными линиями связи равной длинны, причем проводные линии связи СБС выполнены в виде электрического кабеля, содержащего пары витых проводов, электропроводной линии связи (ЭПЛС) и/или в виде оптического кабеля волоконно-оптической линии связи (ВОЛС) и снабжены соответствующими портами для подключения к СН и КДП ЦОВД АМПСН.
2. Сеть по п. 1, отличающаяся тем, что каждая приёмопередающая БС имеет в своем составе программируемый логический контроллер с вводно-выводным устройством (ВВУ) и программным разделением несущей частоты на временные интервалы постоянной длительности по технологии множественного доступа с временным разделением (МДВР), причем ВВУ контроллера БС содержит три интерфейсных порта - модульные компактные приёмопередатчики, включая оптический порт (ОП), для подключения кабеля ВОЛС к аналогичному ОП коммутатора, порт синхронизации (ПС) для подключения кабеля ЭПС к аналогичному порту ПС устройства синхронизации (УС) и порт Ethernet (ПЕ) для подключения кабеля ЭПЛС к аналогичному порту коммутатора СБС.
3. Сеть по п. 1, отличающаяся тем, что приёмопередающие АС имеют в своем составе программируемый логический контроллер с вводно-выводным устройством (ВВУ) и с программным разделением несущей частоты на временные интервалы постоянной длительности по технологии множественного доступа с временным разделением (МДВР), причем ВВУ контроллера АС содержит интерфейсный порт Ethernet (ПЕ) для подключения кабеля ЭПЛС к аналогичному порту средств наблюдения (СН) аэродромной многопозиционной системы наблюдения (АМПСН).
| СПОСОБ МНОГОПОЗИЦИОННОГО НАБЛЮДЕНИЯ, КОНТРОЛЯ И УПРАВЛЕНИЯ НАД ПОЛЕТАМИ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ АВИАЦИОННЫХ СИСТЕМ В ОБЩЕМ ВОЗДУШНОМ ПРОСТРАНСТВЕ | 2019 |
|
RU2710983C1 |
| Многопозиционная система посадки воздушных судов | 2015 |
|
RU2608183C1 |
| Способ получения синтетического клея | 1958 |
|
SU118092A1 |
| US 20220376849 A1, 24.11.2022 | |||
| WO 2022170401 А1, 18.08.2022 | |||
| WO 2022217618 A1, 20.10.2022 | |||
| M | |||
| Borden, S | |||
| DeHart and J | |||
| Budinger, "Leveraging 802.16e in airport surface communications networks," 2009 Integrated Communications, Navigation and Surveillance Conference, | |||
