ОБЛАСТЬ ТЕХНИКИ
Техническое решение относится к области информационно-измерительной техники, а именно к автоматизированным системам управления и контроля. Способ относится к системам управления и контроля пилотируемыми и беспилотными авиационными системами для обеспечения безопасности их полета в общем воздушном пространстве, но может быть применен и на других транспортных средствах.
УРОВЕНЬ ТЕХНИКИ
В настоящее время широкое распространение получают различные системы и способы доставки товаров и грузов с помощью БАС (беспилотные авиационные системы).
Известна система навигации БАС, описанная в патенте США №8626361, опубликованном 25.11.2008. В известной системе первый БАС содержит данные, представляющие собой маршрут полета первого БАС и наземную станцию. Наземная станция принимает данные с БАС, представляющие собой, маршрут полета первого БАС, рассчитывает маршрут полета для второго БАС, таким образом, чтобы траектории полета первого БАС и второго БАС не пересекались, и передает рассчитанный маршрут полета на второй БАС.
Известна система учета положения БАС, описанная в патенте США №8386175, опубликованном 18.03.2010. Известная система включает в себя систему отчетности управления воздушным движением (УВД) в сочетании с наземной станции управления (НСУ), УВД включает в себя систему автоматической трансляции наблюдения за БАС и информации о трафике услуг вещания, приемопередатчик и один или более телекоммуникационных модемов. НСУ выполнена с возможностью приема данных о позиции БАС в воздушном пространстве и сообщает позицию БАС в воздушном пространстве оператору УВД или в коммуникационный центр через приемопередатчик. УВД также может быть выполнен с возможностью отображения положения БАС в воздушном пространстве, на одном или более экранах.
Известна система управления БЛА, описанная в патенте США №8521339, опубликованном 08.04.2010. В известной системе организована удаленная связь между БАС и базовой станцией. БАС передает на базовую станцию свои координаты с привязкой к карте, базовая станция определяет вектора скорости для БАС и направляет БАС в соответствии с определенным вектором скорости до тех пор, пока БАС не достигнет цели.
Известна система безопасности полетов БАС в гражданском воздушном пространстве, описанная в патенте США №8838289, опубликованном 07.02.2008. Известная система включает в себя: наземную станция оснащенную системой технического зрения; БАС; удаленный оператор, управляющий наземной станцией; канал связи между БАС и наземной станцией; систему на борту БАС для обнаружения присутствия и положение вблизи воздушных судов и передачи этой информации удаленному оператору; Из предшествующего уровня техники известен способ управления беспилотным летательным аппаратом и устройство для его реализации (см. патент RU №2390815, опубл. 27.05.2010 г.), характеризующий управление одним или несколькими беспилотными летательными аппаратами, каждый из которых оборудован бортовой автоматической системой управления, спутниковой навигационной системой, высокоточными синхронизированными часами, а также бортовым вычислителем и приемо-передающей радиостанцией, с помощью которой осуществляется цифровая радиосвязь с базовой радиостанцией, со стационарным или подвижным пунктом управления, который оборудован автоматизированным рабочим местом оператора, при этом передача команд управления движением беспилотного летательного аппарата, передача данных о координатах и параметрах его движения, а также передача идентификационных номеров и данных о координатах и параметрах движения других подвижных объектов, оборудованных приемопередающими радиостанциями и находящихся в пределах радиовидимости, производится в один или несколько общих радиоканалов, причем трансляция сообщений каждой передающей радиостанцией производится в заранее заданный отрезок дискретной шкалы единого времени с временным упреждением, которого достаточно для компенсации запаздывания в получении и исполнении указанных команд.
Недостатком известных способов управления беспилотным летательным аппаратом является то, что управление и контроль БВС осуществляется с наземного пункта управления в пределах радиовидимости, что затрудняет поддержание безотказного состояния оборудования БВС при эксплуатации, а также осуществление контроля за выполнением санкционированного трафика полета БВС, а это снижает уровень безопасности полетов, а по существу делает невозможным обеспечение интеграции беспилотных авиационных систем в общее воздушное пространство.
Существующие правила управления воздушным движением (УВД) сформировались, когда масштабы БАС по существу ограничивались авиамодельным спортом.
Воздушное пространство пронизано специальными путями, которые переходят из одной контролируемой зоны в другую. Точное число летательных аппаратов сказать довольно сложно, поскольку оно измеряется уже тысячами самолетов, число которых из года в год только растет.
Можно представить, что будет в воздушном пространстве, когда число увеличится на порядки. И здесь без автоматизированного управления эксплуатацией беспилотного воздушного судна при полетах в общем воздушном пространстве не обойтись, причем автоматически должен формироваться и контролироваться не только трафик полета, но также остаточный ресурс и предотказное состояние на всех этапах жизненного цикла, а также выявление случаев несанкционированного изменения трафика полета БВС.
Типовая структура системы управления для БАС состоит из различных источников данных. Полученные данные попадают в блок бортовой системы управления (БАСУ), где производится оценка параметров движения объекта и выработка управляющих воздействий на исполнительные механизмы объекта. В качестве входных данных блок системы управления также может принимать внешние управляющие воздействия. Выработанные значения сигналов управления подаются на органы управления полетом БАС. В памяти БАСУ хранятся программы выполнения полета и конфигурации блока управления, изменяющиеся под воздействием определенных событий, происходящих на БАС в полете.
В настоящее время традиционные средства управления воздушным движением пилотируемой гражданской авиации меняются на многопозиционные системы наблюдения (МПСН), основанные на многопозиционных технологиях АЗН-В, активно используются в качестве высокоточного источника информации о воздушной обстановке в аэропортовых, аэродромных и трассовых зонах УВД. Наземная станция аэродромной многопозиционной системы наблюдения (МПСН-А) предназначена для определения местоположения и управления движением воздушных судов, спецавтотранспортом, техническими средствами и другими объектами, оборудованных ответчиками, находящихся на посадочной прямой и рабочей площади аэродрома (площади маневрирования и перроне, на взлетно-посадочной полосе, рулежных дорожках и местах стоянок воздушных судов). Московский аэропорт Домодедово первым в России устанавливает аэродромную многопозиционную систему наблюдения. Установка АМПСН и ее интеграция в уже работающую в Домодедово систему A-SMGCS (Усовершенствованная система управления наземным движением и контроля за ним) является наилучшим решением обеспечения контроля за наземным движением на аэродроме. Объединенные функции двух систем обеспечат наиболее полное и точное отображение на мониторах диспетчеров вышки УВД местоположения и передвижения самолетов и транспортных средств на взлетно-посадочных полосах, рулежных дорожках и перронах аэропорта. В основе новой системы лежит развертывание сети наземных станций системы АМПСН, рассредоточенных по всему аэродрому, стойки центральной обработки информации и 150 маяков (передающих устройств), установленных на спецтранспорт.
Однако МПСН имеет существенный недостаток:
- является системой высокоточного источника информации о воздушной обстановке в аэропортовых, аэродромных и трассовых зонах УВД и не учитывает необходимость обеспечения совместных полетов в общем воздушном пространстве, так как оснащение всего пространства территории Российской Федерации будет очень дорогой и практически не реализуемой задачей.
СУЩНОСТЬ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Предлагаемое техническое решение направлено на устранение недостатков, присущих существующим аналогам. Задачей заявляемого способа самоорганизующейся многопозиционной системы наблюдения, контроля и управления над полетами пилотируемых и беспилотных авиационных систем в общем воздушном пространстве, что повысит уровень обеспечения безопасности полетов на всех участках полета БАС.
Технический результат от использования данного технического решения заключается в обеспечении безопасных полетов пилотируемой и беспилотной авиации в общем воздушном пространстве.
Такой технический результат заявляемого способа обеспечивается за счет того, что наряду с наземными многопозиционными системами наблюдения, которые размещаются в первую очередь в районе аэропортов, совмещенные со службой управления воздушным движением, формируется воздушная многопозиционная система наблюдения, используя сами летательные аппараты, которые используются, как подвижные элементы системы многопозиционного наблюдения.
Способ самоорганизующегося многопозиционного наблюдения, контроля и управления над полетами пилотируемых и беспилотных авиационных систем в общем воздушном пространстве, который включает наземную структуру многопозиционной системы наблюдения, контроля и управления, пилотируемыми и беспилотными аппаратами, а каждый летательный аппарат оборудован бортовой автоматической системой управления, спутниковой навигационной системой, высокоточными синхронизированными часами, а также бортовым вычислителем и приемо-передающей радиостанцией, с помощью которой осуществляется цифровая радиосвязь с базовой радиостанцией, со стационарным или подвижным пунктами управления, которые оборудованы автоматизированным рабочим местом оператора, отличающийся тем, что наряду с наземными многопозиционными системами наблюдения, которые размещаются в первую очередь в районе аэропортов, совмещенные со службой управления воздушным движением, формируется воздушная многопозиционная система наблюдения, используя сами летательные аппараты, которые используются, как подвижные маяки, которым присваиваются идентификационные номера, передаваемыми с командами управления движением беспилотного летательного аппарата и данные о координатах и параметрах его движения, а также блок приема информации с других летательных аппаратов, находящихся в ближайшем пространстве о трафиках их полета, причем, радиосигнал дополнительно обрабатывается, например, используя принцип Доплера, для уточнения реальных координат других летательных аппаратов, а в блоке обработки полученная информация о трафиках взаимного полета, а также аэронавигационные данные и пилотажно-навигационные характеристики, включая команды наземной службы контроля и управления за полетом летательных аппаратов, преобразуются в команды управления трафиком полета, обеспечивая безопасный совместный полет, исключающий столкновение, а также передаются идентификационные номера и данные о координатах и параметрах движения других летательных аппаратов, оборудованных приемопередающими радиостанциями и находящихся в пределах радиовидимости наземной многопозиционной системы наблюдения и службы управления воздушным движением, образуя единую самоорганизующуюся сеть многопозиционного наблюдения, контроля и управления над полетами пилотируемых и беспилотных летательных аппаратов в общем воздушном пространстве, включающую наземную структуру и сеть летательных аппаратов, причем в передаваемом сообщении с летательных аппаратов, указывается идентификационный номер наземной станции, которая осуществляет контроль и управление за его полетом, который свидетельствует о необходимости ретрансляции, полученного сообщения, по этому адресу, а сформированный трафик связи служит каналом управления и контроля за полетом летательных аппаратов, причем, когда трафик контроля и управления невозможно организовать, то летательный аппарат переходит в режим автономного полета, осуществляя прием сигналов оповещения от приближающихся летательных аппаратов, обеспечивая безопасность полета, а в случае выявления получения недостоверной информации о трафике полета с летательного аппарата, который отклоняется от санкционированного трафика полета, корректируют трафики полетов таких летательных аппаратов, передавая через систему ретрансляции сигналы управления, а в случае невозможности корректировки полета летательного аппарата, например, когда недостоверная информация с летательного аппарата передается умышленно, то информация о времени потери управления с таким летательным аппаратом и параметрах его движения, планируемом трафике полета, а также технические данные в режиме онлайн передаются в службу пресечения несанкционированного полета беспилотного летательного аппарата.
Это позволит эффективным путем решить проблему совместных полетов пилотируемой и беспилотной авиации в общем воздушном пространстве.
Проведенный анализ технических решений позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют в известных носителях информации, что указывает на соответствие заявленного способа условию патентоспособности "новизна".
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками, показали, что они не следуют явным образом из уровня техники.
Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности "изобретательский уровень".
Это позволит эффективным путем решить проблемы информативности средств наблюдения за воздушной обстановкой, а также применение эффективных способов управления БАС.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
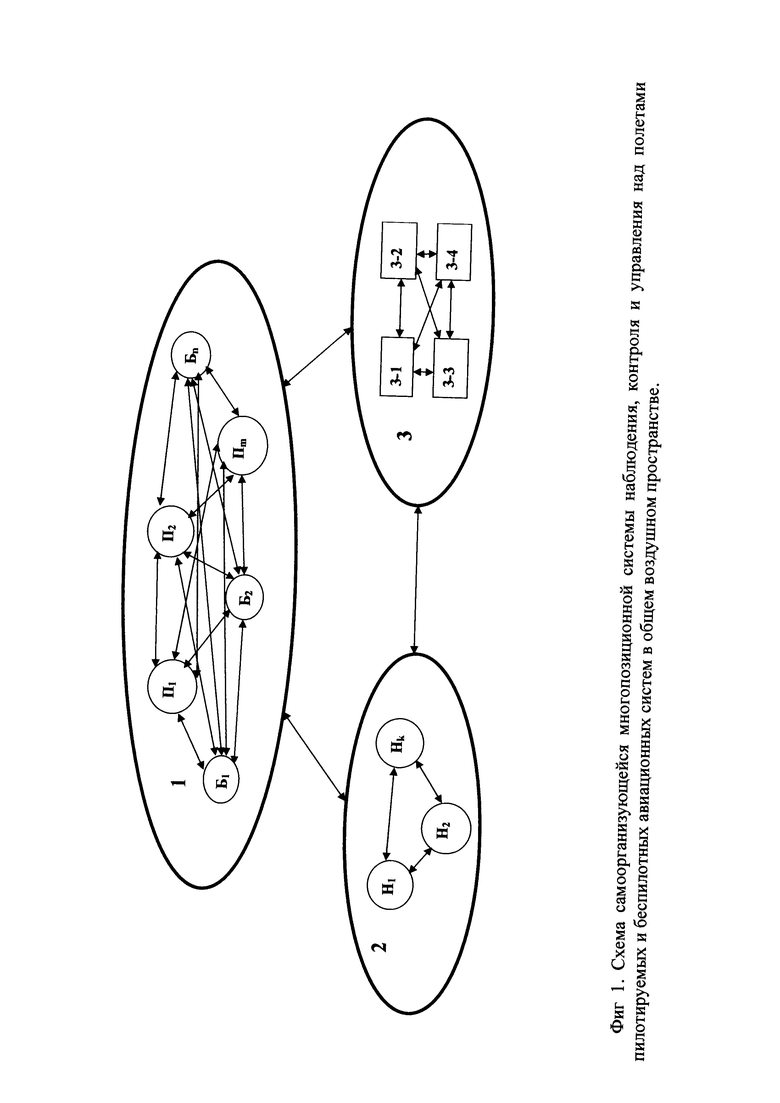
Заявленный способ реализуется по блок-схеме, представленной на Фиг. 1, которая состоит из следующих основных блоков:
1 - воздушная многопозиционная система наблюдения, использующая летательные аппараты, включающая сеть пилотируемых летательных аппаратов П1, П1, …, Пm и беспилотных летательных аппаратов Б1, Б2, …, Бn;
2 - наземными многопозиционными системами наблюдения, использующая распределенные наземные маяки Н1, Н2, …, Нk;
3 - служба управления воздушным движением, использующая центр контроля и управления 3-1, центр анализа и обработки информации 3-2, центр приема и передачи информации 3-3; портал базы данных 3-4.
ПОДРОБНОЕ ОПИСАНИЕ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Изобретение относится к области информационно-измерительной техники, а именно к автоматизированным системам управления и контроля. Способ относится к пилотируемым и беспилотным авиационным системам для обеспечения безопасности их полета в общем воздушном пространстве, но может быть применен и на других транспортных средствах.
Данное техническое решение направлено на устранение недостатков, присущих существующим аналогам. Задачей заявляемого способа самоорганизующейся многопозиционной системы наблюдения, контроля и управления над полетами пилотируемых и беспилотных авиационных систем в общем воздушном пространстве, что повысит уровень обеспечение безопасности полетов на всех участках их полета.
Технический результат от использования данного технического решения заключается в обеспечении безопасных полетов пилотируемой и беспилотной авиации в общем воздушном пространстве.
Такой технический результат заявляемого способа обеспечивается за счет того, что наряду с наземными многопозиционными системами наблюдения, которые размещаются в первую очередь в районе аэропортов, совмещенные со службой управления воздушным движением, формируется воздушная многопозиционная система наблюдения, используя сами летательные аппараты, которые используются, как подвижные элементы многопозиционная системы наблюдения.
Заявленный способ поясняется схемой, на которой показано осуществление контроля и управления летательными аппаратами, реализующий заявленный способ.
Для осуществления полетов БАС необходимо зарегистрировать в базе данных с присвоением регистрационного номера и последующими изменениями, отражающими техническое состояние БАС в процессе всего жизненного цикла, как при техническом обслуживании и ремонте, так и в процессе полета. Эта информация используется для осуществления контроля за полетом БАС, с целью обеспечения безопасного полета.
Для выполнения конкретного полета, с использованием зарегистрированного БВС, подается заявка, которая анализируется на предмет возможности ее выполнения, корректируется при необходимости и выдается разрешение на выполнение согласованного полета в заданном воздушном пространстве.
Каждый зарегистрированный БАС должен иметь лицензионный информационный блок, который не допускает несанкционированного вскрытия и перенастройки, включающий следующую базовую комплектацию - блок навигации БАС, блок передачи данных БАС, блок приема данных БАС, блок формирования команд управления БАС, блок ретрансляции БАС (допускается упрощенная комплектация).
Региональный центр контроля за полетом БАС принимает информацию, характеризующую текущее техническое состояние и трафик полета БАС, происходит сравнение с согласованными параметрами полета, выявляет отклонения от санкционированного и по результатам анализа принимается решение. Причем такой контроль осуществляется над всеми БАС, которые находятся в зоне контроля данного регионального центра, используя либо линии передачи информации непосредственно с БАС, либо за счет ретрансляции через другие БАС.
Дополнительно, осуществляется вычисление по доплеровским измерениям текущих параметров трафика полета других БАС, которые ретранслируются по каналам связи наземным службам управления воздушным движением.
В случае перехода БАС из одного регионального центра в другой в соответствие с запланированным санкционированным трафиком полета, то дальнейший контроль переходит к этому центру.
В случае отсутствия прямой радиовидимости информация ретранслируется через другие БАС наземным службам управления воздушным движением.
Пакет информации для ретрансляции дополняется пакетами с информацией, поступившей для ретрансляции с других БАС и направляется наземным службам управления воздушным движением (ретрансляция может осуществляться через спутниковые каналы связи).
В случае отклонения от санкционированного трафика полета служба управления воздушным движением подает команды на возвращение к санкционированному трафику полета и автоматически эта информация поступает в службу пресечения несанкционированного полета беспилотного воздушного судна.
В случае возвращения БВС к санкционированному трафику полета продолжается штатный режим работы службы управления воздушным движением, а если принятые меры не дали положительного результата, то служба пресечения несанкционированного полета беспилотного воздушного судна принимает меры по пресечению такого полета, используя информацию о характеристиках БВС, времени и месте начала несанкционированного полета.
Поставленная цель достигается тем, что в известном способе самоорганизующегося многопозиционного наблюдения, контроля и управления над полетами пилотируемых и беспилотных авиационных систем в общем воздушном пространстве, который включает наземную структуру многопозиционной системы наблюдения, контроля и управления, пилотируемыми и беспилотными аппаратами, а каждый летательный аппарат оборудован бортовой автоматической системой управления, спутниковой навигационной системой, высокоточными синхронизированными часами, а также бортовым вычислителем и приемо-передающей радиостанцией, с помощью которой осуществляется цифровая радиосвязь с базовой радиостанцией, со стационарным или подвижным пунктами управления, которые оборудованы автоматизированным рабочим местом оператора, при этом, наряду с наземными многопозиционными системами наблюдения, которые размещаются в первую очередь в районе аэропортов, совмещенные со службой управления воздушным движением, формируется воздушная многопозиционная система наблюдения, используя сами летательные аппараты, которые используются, как подвижные маяки, которым присваиваются идентификационные номера, передаваемыми с командами управления движением беспилотного летательного аппарата и данные о координатах и параметрах его движения, а также блок приема информации с других летательных аппаратов, находящихся в ближайшем пространстве о трафиках их полета, причем, радиосигнал дополнительно обрабатывается, например, используя принцип Доплера, для уточнения реальных координат других летательных аппаратов, а в блоке обработки полученная информация о трафиках взаимного полета, а также аэронавигационные данные и пилотажно-навигационные характеристики, включая команды наземной службы контроля и управления за полетом летательных аппаратов, преобразуются в команды управления трафиком полета, обеспечивая безопасный совместный полет, исключающий столкновение, а также передаются идентификационные номера и данные о координатах и параметрах движения других летательных аппаратов, оборудованных приемопередающими радиостанциями и находящихся в пределах радиовидимости наземной многопозиционной системы наблюдения и службы управления воздушным движением, образуя единую самоорганизующуюся сеть многопозиционного наблюдения, контроля и управления над полетами пилотируемых и беспилотных летательных аппаратов в общем воздушном пространстве, включающую наземную структуру и сеть летательных аппаратов, причем в передаваемом сообщении с летательных аппаратов, указывается идентификационный номер наземной станции, которая осуществляет контроль и управление за его полетом, который свидетельствует о необходимости ретрансляции, полученного сообщения, по этому адресу, а сформированный трафик связи служит каналом управления и контроля за полетом летательных аппаратов, причем, когда трафик контроля и управления невозможно организовать, то летательный аппарат переходит в режим автономного полета, осуществляя прием сигналов оповещения от приближающихся летательных аппаратов, обеспечивая безопасность полета, а в случае выявления получения недостоверной информации о трафике полета с летательного аппарата, который отклоняется от санкционированного трафика полета, корректируют трафики полетов таких летательных аппаратов, передавая через систему ретрансляции сигналы управления, а в случае невозможности корректировки полета летательного аппарата, например, когда недостоверная информация с летательного аппарата передается умышленно, то информация о времени потери управления с таким летательным аппаратом и параметрах его движения, планируемом трафике полета, а также технические данные в режиме онлайн передаются в службу пресечения несанкционированного полета беспилотного летательного аппарата. Это позволит эффективным путем решить проблемы информативности средств наблюдения за воздушной обстановкой, а также применение эффективных способов управления БАС.
Изобретение относится к способу самоорганизующегося многопозиционного наблюдения, контроля и управления полетами пилотируемых и беспилотных авиационных систем. Для реализации способа используют наземную службу контроля и управления за полетом летательных аппаратов, куда передают информацию о трафиках взаимного полета, аэронавигационные данные, пилотажно-навигационные характеристики каждого из летательных аппаратов, их идентификационные номера и координаты и параметры движения, вырабатывают команды управления трафиком полета. При потере связи с наземными службами летательный аппарат переходит в режим автономного полета, осуществляя связь с другими летательными аппаратами для корректировки полета. В случае потери управления летательным аппаратом технические данные передаются в службу пресечения несанкционированного полета. Обеспечивается повышение управляемости летательных аппаратов и безопасности их полетов. 1 ил.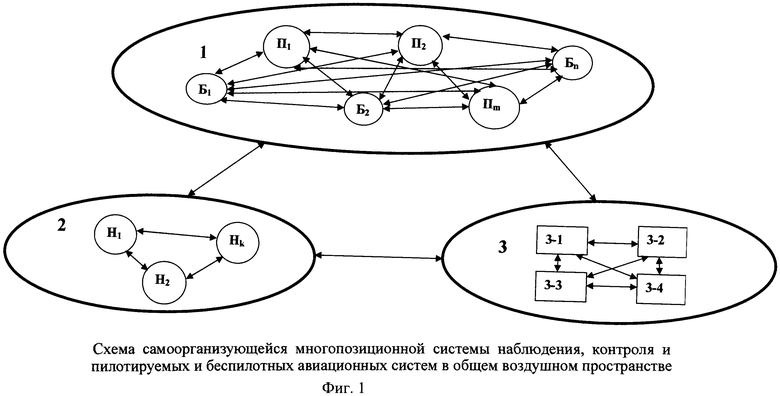
Способ многопозиционного наблюдения, контроля и управления полетами пилотируемых и беспилотных авиационных систем, заключающийся в том, что в наземную службу контроля и управления за полетом летательных аппаратов соответствующего регионального центра каждый летательный аппарат передает заявку на выполнение полета в заданном воздушном пространстве, где анализируется информация о трафиках взаимного полета аэронавигационные данные и пилотажно-навигационные характеристики каждого из летательных аппаратов, их идентификационные номера, непрерывно анализируются координаты и параметры движения летательных аппаратов в полете, получая информацию с летательных аппаратов, например используя АЗН-В, формируют наземно-воздушную сеть многопозиционного наблюдения, контроля и управления полетами пилотируемых и беспилотных летательных аппаратов в общем воздушном пространстве, вырабатывают команды управления трафиком полета, при потере связи с наземными службами летательный аппарат переходит в режим автономного полета, принимая попытки связи с другими летательными аппаратами для корректировки полета и ретрансляции данных его полета региональному центру, при этом в случае отклонения от санкционированного трафика полета подается команда на возвращение к санкционированному трафику и автоматически эта информация поступает в службу пресечения несанкционированного полета, которая принимает меры по пресечению полета в случае невозвращения летательного аппарата к санкционированному трафику.
| Дешифратор к буквопечатающему телеграфному приемнику | 1948 |
|
SU82971A2 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ПОЛЕТАМИ БЕСПИЛОТНЫХ АВИАЦИОННЫХ СИСТЕМ В ОБЩЕМ ВОЗДУШНОМ ПРОСТРАНСТВЕ | 2018 |
|
RU2674536C1 |
| СПОСОБ ОРГАНИЗАЦИИ ВОЗДУШНОГО ДВИЖЕНИЯ НА ОСНОВЕ БОРТОВОГО ГЛОНАСС/GPS-ОБОРУДОВАНИЯ И GSM/GPRS СЕТЕЙ В ВОЗДУШНОМ ПРОСТРАНСТВЕ КЛАССОВ C, G | 2015 |
|
RU2609625C2 |
| US 20160275801 A1, 22.09.2016 | |||
| US 9052375 B2, 09.06.2015. | |||

