Область техники
Изобретение относится к системам автоматического магнитного управления положением, формой и током плазмы в токамаке с диверторной конфигурацией и может быть использовано в устройствах типа токамак, реализующих управляемый термоядерный синтез.
Уровень техники
Проблема управляемого термоядерного синтеза (УТС), исследования по которой были начаты в начале 50-х годов прошлого столетия, является одной из центральных в науке и технике. Решение данной проблемы откроет новый, безопасный, практически неисчерпаемый источник энергии от синтеза ядер легких элементов, что позволит значительно уменьшить выбросы в атмосферу углекислого газа от сжигания ископаемых видов топлива, замедлит неблагоприятные и опасные для человечества изменение климата на Земле.
Наиболее перспективным направлением УТС являются установки типа токамак с D образным сечением (диверторная конфигурация), на основе которых планируется создавать термоядерные источники нейтронов, гибридные термоядерные реакторы и термоядерные энергетические реакторы. Нагрев и удержание плазмы в токамаке для обеспечения самоподдерживающейся термоядерной реакции обеспечивают системы магнитного и кинетического управления плазмой с обратной связью от данных физических диагностик. На данный момент не решена одна из основных проблем УТС - продолжительное удержание плазмы с заданными параметрами и предотвращение срывов.
Конфигурация электромагнитной системы (ЭМС) токамака обусловлена особенностями метода получения и удержания плазмы:
• Генерация и поддержание тока в плазме осуществляется с помощью обмотки индуктора (ОИ) при изменении тока в котором на тороидальной оси создается ЭДС ε=-dψ/dt, где ψ - магнитный поток внутри плазменного кольца с током.
Магнитная термоизоляция плазмы от стенок вакуумной камеры обеспечивается сильным тороидальным магнитным полем, которое вместе с полоидальным полем тока плазмы Iр создает винтовую конфигурацию магнитных силовых линий, необходимую для подавления тороидального дрейфа плазмы и сохранения устойчивости шнура. Тороидальное поле создается соединенными последовательно катушками обмотки тороидального магнитного поля (ОТП).
• Форма и положение плазменного шнура обеспечивается полоидальными полями, создаваемыми с помощью системы обмоток управления (ОУ) полоидального поля.
• Предотвращение срывов плазмы по вертикали осуществляется с помощью обмотки горизонтального управляющего поля (ОГУП).
Для ввода тока в обмотки ОИ, ОТП и ОУ используются источники питания на базе тиристорных выпрямителей, а для ввода тока в обмотки ОГУП - быстродействующие инверторы напряжения на основе IGBT-транзисторов.
Изобретение заключается в создании системы магнитного управления положением, формой и током плазмы в токамаке с диверторной конфигурацией в соответствии со сценарием эксперимента и с обратной связью в контурах управления по токам обмоток магнитного управления, току плазмы и данным электромагнитной диагностики.
Сценарий эксперимента, разработанный с помощью плазмофизических кодов, включает программы (уставки) токов в обмотках и тока плазмы IР (с учетом их взаимного влияния), геометрических параметров плазмы. Функцией восстановительного кода является восстановление геометрических параметров плазмы (положения и формы) для реализации в системы магнитного управления плазмой (СУП).
Для решения задачи управления формой плазмы необходимо в реальном времени знать текущие значения управляемых параметров, которые невозможно получить прямым измерением. Поэтому применяются косвенные методы восстановления параметров формы по измерениям датчиков электромагнитной диагностики (ЭМД).
Известны различные подходы к управлению формой плазмы на современных установках типа токамак с вертикально вытянутой магнитной конфигурацией:
1. Управление формой по значениям зазоров между сепаратрисой и первой стенкой (gap control). Данный подход используется на установках: JET (Англия), ASDEX Upgrade (Германия). Данный подход имеет прямой физический смысл - контролируются параметры безопасного расстояния между поверхностью плазмы и первой стенкой. К недостаткам данного подхода относится вычислительная сложность алгоритмов восстановления и трудность их реализации в режиме реального времени.
2. Управление формой по значениям магнитного потока в точках на сепаратрисе (isoflux control) используется на установках: DIII-D (США), EAST (Китай), KSTAR (Южная Корея). Данный подход позволяет уменьшить вычислительную нагрузку относительно предыдущего, поскольку использует управление по косвенным параметрам и не требует полного восстановления формы плазмы.
Недостатком существующих вариантов восстановительного кода является невозможность их использования в режиме реального времени без внесения изменений в контурах системы управления, поскольку код имеет недостаточное быстродействие. Задействованный в данном изобретении код, основанный на методе управление формой по значениям зазоров между сепаратрисой и первой стенкой (развитие gap control), должен быть линеаризован для увеличения скорости расчетов и использования в контуре управления в режиме реального времени.
Известен «Способ формирования модели магнитного управления формой и током плазмы с обратной связью в токамаке» (патент на изобретение RU 2702137 C1). Изобретение относится к способу формирования систем магнитного управления формой и током плазмы с обратной связью в токамаках и может быть применено для стабилизации положения сепаратрисы плазмы при отражении действия возмущений типа малого срыва в токамаках. При формировании обратной связи используют переменные входные и выходные параметры плазмы в токамаке. Входными параметрами являются значения векторов напряжения на обмотках полоидального поля и центрального соленоида токамака, обеспечивающих магнитную связь с плазмой. Выходные параметры в каждый момент времени представляют собой одномерный массив значений изменения векторов тока плазмы, токов в обмотках полоидального поля и центрального соленоида, сигналы на магнитных петлях и зондах, сигналы, пропорциональные вертикальному и горизонтальному смещению магнитной оси плазмы или центра тока плазменного шнура.
В отличие от этого способа, заявляемое изобретение вместо векторов напряжения задействует в обратной связи для управления параметрами плазмы значения токов обмоток. Для увеличения точности и скорости регулирования контур восстановительного кода содержит расчет не только координат R и Z для х-точки, но и значения зазоров между плазмой и избранными точками тороидального сечения магнитной камеры, что повышает точность управления положением и формой плазмы. Помимо этого, при формировании обратных связей между входными и выходными параметрами плазмы для управления параметрами плазмы выделены несколько контуров расчетных кодов и регуляторов, которые могут работать асинхронно и параллельно, что повышает быстродействие и устойчивость системы управления за счет асинхронного и последовательно-параллельного выполнения.
Технической проблемой, на решение которой направлено заявляемое изобретение является создание системы автоматического магнитного управления плазмой, обеспечивающей возможность управления током, формой и положением плазмы с предотвращением их отклонений от заданных параметров.
Раскрытие сущности изобретения
Техническим результатом является повышение продолжительности и стабильности плазменного разряда в токамаке с диверторной конфигурацией в соответствии с заданным сценарием разряда.
Для достижения технического результата предложена система автоматического магнитного управления положением, формой и током плазмы в токамаке с диверторной конфигурацией состоящая из блока линеаризованного кода восстановления формы плазмы в реальном времени, соединенного каналом передачи рассчитанных геометрических параметров плазмы для отработки вертикальных неустойчивостей с блоком регулятора источника питания ОГУП и каналом передачи рассчитанных геометрических параметров плазмы для кода восстановления параметров плазмы с блоком кода восстановления параметров плазмы, который каналом передачи рассчитанных геометрических параметров плазмы для кода восстановления параметров плазмы соединен с блоком регулятора источников питания ОИ и ОУ, блока данных сценария разряда, соединенного каналами передачи референсного значения тока с блоком регулятора источников питания ОИ и ОУ, блоком регулятора источника питания ОТП и блоком регулятора источника питания ОГУП, блока датчиков ЭМД, который каналом передачи сигналов, необходимых для расчета геометрических параметры плазмы соединен с блоком линеаризованного кода восстановления формы плазмы в реальном времени, каналом передачи сигналов для расчета тока плазмы соединен с блоком регулятора источников питания ОИ и ОУ, а каналом передачи данных о величинах магнитных полей с блоком преобразователей ЭМД, который каналом передачи сигналов, необходимых для обнаружения и предотвращения срывов и отработки сценария регулятора ОГУП соединен с блоком регулятора источника питания ОГУП, блока управления источником питания ОИ, который каналом передачи электрического угла управления соединен с блоком источников питания ОИ, который каналом передачи напряжения соединен с блоком ОИ, который по каналу передачи индукции магнитного поля обмоток соединен с плазмой, соединенной по каналу регистрации данных о величинах магнитных полей с блоком датчиков ЭМД а по каналу регистрации действующего значения тока соединен с блоком датчиков тока в ОУ и ОИ, соединенным по каналу передачи действующего значения тока с блоком регулятора источников питания ОИ и ОУ, соединенным по каналу передачи управляющего воздействия с блоком управления источником питания ОИ, блока управления источником питания ОТП, который по каналу передачи электрического угла управления соединен с блоком источника питания ОТП, который по каналу передачи напряжения соединен с блоком ОТП, соединенным по каналу передачи индукции магнитного поля обмоток с плазмой, а по каналу регистрации действующего значения тока с блоком датчиков тока в ОТП и ОГУП, соединенным по каналам передачи действующего значения тока с блоком регулятора источника питания ОТП и блоком регулятора источника питания ОГУП, который по каналу передачи уставки соединен с блоком управления источником питания ОГУП по каналу передачи управляющего воздействия соединенным с блоком источника питания ОГУП по каналу передачи напряжения соединенным с блоком ОГУП, который по каналу регистрации данных о величинах магнитных полей соединен с плазмой, а по каналу регистрации действующего значения тока соединен с блоком датчиков тока в ОТП и ОГУП, а также из блока управления источником питания ОУ, который каналом передачи управляющего воздействия соединен с блок регулятора источников питания ОИ и ОУ, а по каналу передачи электрического угла управления с блоком источников питания ОУ, который по каналу передачи напряжения соединен с блоком ОУ, соединенным с плазмой по каналу передачи индукции магнитного поля обмоток, а с блоком датчиков тока в ОУ и ОИ по каналу регистрации действующего значения тока.
Краткое описание чертежей
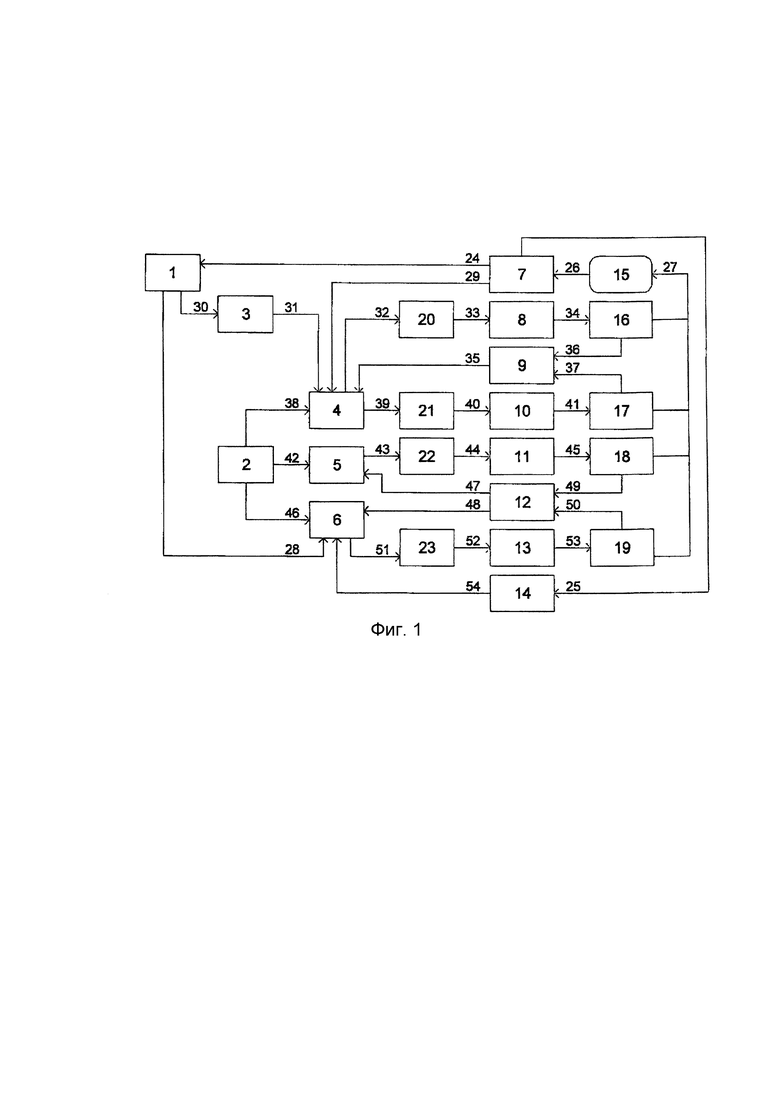
На фиг. 1 показана структурная схема системы автоматического магнитного управления положением, формой и током плазмы в токамаке с диверторной конфигурацией, где:
1 - блок линеаризованного кода восстановления формы плазмы в реальном времени;
2 - блок данных сценария разряда;
3 - блок регулятора источников питания ОИ и ОУ;
4 - блок регулятора источника питания ОТП;
5 - блок регулятора источника питания ОГУП;
6 - блок датчиков ЭМД;
7 - блок источников питания ОУ;
8 - блок датчиков тока в ОУ и ОИ;
9 - блок источников питания ОИ;
10 - блок источника питания ОТП;
11 - блок датчиков тока в ОТП и ОГУП;
12 - блок источника питания ОГУП;
13 - блок преобразователей ЭМД;
14-плазма;
15- блок ОУ;
16- блок ОИ;
17- блок ОТП;
18- блок ОГУП;
19 - блок управления источником питания ОУ;
20 - блок управления источником питания ОИ;
21 - блок управления источником питания ОТП;
22 - блок управления источником питания ОГУП;
23 - канал передачи сигналов, необходимых для расчета геометрических параметры плазмы (смещения R и Z, зазоры);
24 - канал передачи данных о величинах магнитных полей;
25 - канал передачи действующих значений индукции магнитного поля плазмы;
26 - канал передачи индукции магнитного поля обмоток;
27 - канал передачи рассчитанных геометрических параметров плазмы для отработки вертикальных неустойчивостей;
28 - канал передачи сигналов для расчета тока плазмы;
39 - канал передачи рассчитанных геометрических параметров плазмы для расчета уставки управляющей величины;
30 - канал передачи управляющего воздействия;
31 - канал передачи электрического угла управления;
32 - канал передачи напряжения;
33 - канал передачи действующего значения тока;
34 - канал регистрации действующего значения тока;
35 - канал регистрации действующего значения тока;
36 - канал передачи референсного значения тока;
37 - канал передачи управляющего воздействия;
38 - канал передачи электрического угла управления;
39 - канал передачи напряжения;
40 - канал передачи референсного значения тока;
41 - канал передачи управляющего воздействия;
42 - канал передачи электрического угла управления;
43 - канал передачи напряжения;
44 - канал передачи референсного значения тока;
45 - канал передачи действующего значения тока;
46 - канал передачи действующего значения тока;
47 - канал регистрации действующего значения тока;
48 - канал регистрации действующего значения тока;
49 - канал передачи уставки;
50 - канал передачи управляющего воздействия;
51 - канал передачи напряжения;
52 - канал передачи сигналов, необходимых для обнаружения и предотвращения срывов и отработки сценария регулятора ОГУП.
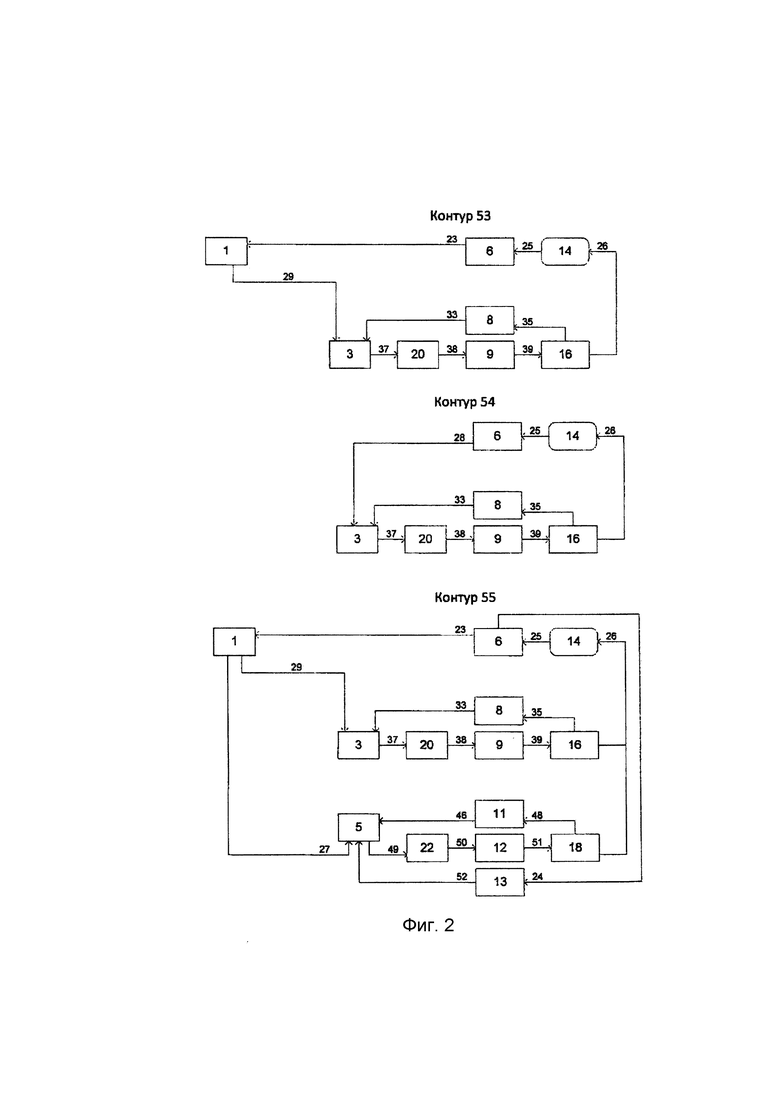
На фиг. 2 структурно показаны 6 контуров управления плазмой, где;
53 - контур с линеаризованным кодом восстановления формы плазмы в реальном времени по значениям зазоров между сепаратрисой и первой стенкой;
54 - контур управления током плазмы;
55 - контур управления формой и положением плазмы;
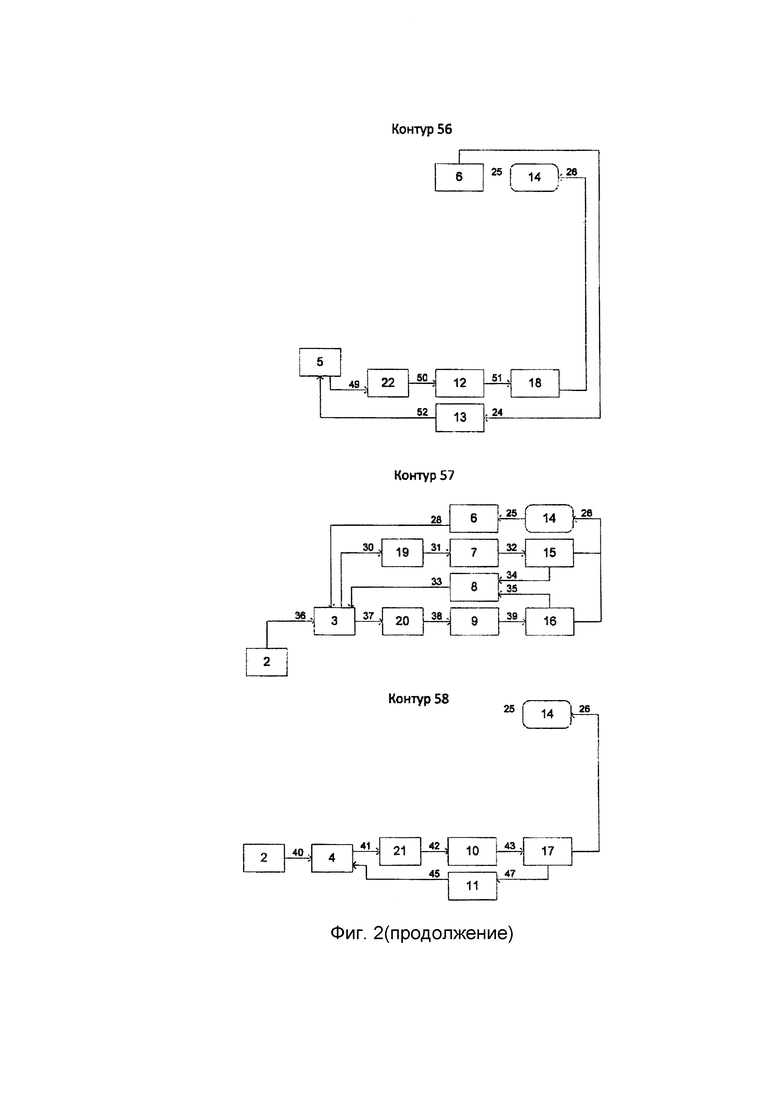
56 - контур управления горизонтальным полем для предотвращения срывов плазмы;
57 - контур управления токами в обмотках индуктора и полоидальных полей с учетом заданного сценария и коррекции с учетом текущих параметров плазмы;
58 - контур управления током в обмотке тороидального магнитного поля.
Осуществление изобретения
Система автоматического магнитного управления положением, формой и током плазмы в токамаке с диверторной конфигурацией, показанная на фиг. 1 состоит из блока линеаризованного кода восстановления формы плазмы в реальном времени 1, соединенного каналом передачи рассчитанных геометрических параметров плазмы для отработки вертикальных неустойчивостей 27 с блоком регулятора источника питания ОГУП 5 и каналом передачи рассчитанных геометрических параметров плазмы для расчета уставки управляющей величины 29 с блоком регулятора источников питания ОИ и ОУ 3, блока данных сценария разряда 2, соединенного каналами передачи референсного значения тока с блоком регулятора источников питания ОИ и ОУ 36, блоком регулятора источника питания ОТП 40 и блоком регулятора источника питания ОГУП 44, блока датчиков ЭМД 6, который каналом передачи сигналов, необходимых для расчета геометрических параметры плазмы 23 соединен с блоком линеаризованного кода восстановления формы плазмы в реальном времени 1, каналом передачи сигналов для расчета тока плазмы 28 соединен с блоком регулятора источников питания ОИ и ОУ 3, а каналом передачи данных о величинах магнитных полей 24 с блоком преобразователей ЭМД 13, который каналом передачи сигналов, необходимых для обнаружения и предотвращения срывов и отработки сценария регулятора ОГУП 52 соединен с блоком регулятора источника питания ОГУП 5, блока управления источником питания ОИ 20, который каналом передачи электрического угла управления 38 соединен с блоком источников питания ОИ 9, который каналом передачи напряжения соединен с блоком ОИ 16, который по каналу передачи индукции магнитного поля обмоток 26 соединен с плазмой 14, соединенной по каналу регистрации данных о величинах магнитных полей с блоком датчиков ЭМД 25, а по каналу регистрации действующего значения тока 35 соединен с блоком датчиков тока в ОУ и ОИ 8, соединенным по каналу передачи действующего значения тока 33 с блоком регулятора источников питания ОИ и ОУ 3, соединенным по каналу передачи управляющего воздействия 37 с блоком управления источником питания ОИ 20, блока управления источником питания ОТП 21, который по каналу передачи электрического угла управления 42 соединен с блоком источника питания ОТП 10, который по каналу передачи напряжения 43 соединен с блоком ОТП 17, соединенным по каналу передачи индукции магнитного поля обмоток 26 с плазмой, а по каналу регистрации действующего значения тока 47 с блоком датчиков тока в ОТП и ОГУП 11, соединенным по каналам передачи действующего значения тока с блоком регулятора источника питания ОТП 45 и блоком регулятора источника питания ОГУП 46, который по каналу передачи уставки 49 соединен с блоком управления источником питания ОГУП 22 по каналу передачи управляющего воздействия 50 соединенным с блоком источника питания ОГУП 12 по каналу передачи напряжения 51 соединенным с блоком ОГУП 18, который по каналу регистрации данных о величинах магнитных полей обмоток 26 соединен с плазмой 14, а по каналу регистрации действующего значения тока 48 соединен с блоком датчиков тока в ОТП и ОГУП 11, а также из блока управления источником питания ОУ 19, который каналом передачи управляющего воздействия 30 соединен с блоком регулятора источников питания ОИ и ОУ 3, а по каналу передачи электрического угла управления 31 с блоком источников питания ОУ 7, который по каналу передачи напряжения 32 соединен с блоком ОУ 15, соединенным с плазмой 14 по каналу передачи индукции магнитного поля обмоток 26, а с блоком датчиков тока в ОУ и ОИ 8 по каналу регистрации действующего значения тока 34.
Система управления плазмой (СУП) делится на шесть частично асинхронных контуров (см. фиг. 2):
1) контур с линеаризованным кодом восстановления формы плазмы в реальном времени по значениям зазоров между сепаратрисой и первой стенкой 53;
2) контур управления током плазмы 54;
3) контур управления формой и положением плазмы 55;
4) контур управления горизонтальным полем для предотвращения срывов плазмы 56;
5) контур управления токами в обмотках шздуктора и полоидальных полей с учетом заданного сценария и коррекции с учетом текущих параметров плазмы 57;
6) контур управления током в обмотке тороидального магнитного поля 58.
Эти контуры включают в себя децентрализованные, частично связанные и асинхронные специализированные регуляторы и блоки восстановительного кода, работающие последовательно-параллельно, входными параметрами для которых являются данные сценария плазменного разряда, в состав которого входят рассчитанные с применением плазмофизических кодов с учетом заданных параметров плазмы и характеристик токамака, программные сценарии для токов обмоток, тока плазмы, геометрических параметров плазмы и программы управления электронной плотностью плазмы и дополнительным нагревом плазмы, сигналы для обратных связей от датчиков (магнитных зондов) формы внешней магнитной поверхности (ДФМП), равномерно расположенных по обходу в полоидальном сечении установки и сигналы тороидальных магнитных петель - датчиков напряжения обхода (ДНО), использующихся для измерения распределения полоидального магнитного потока, от поясов Роговского, позволяющих определить ток плазмы, ток по вакуумной камере и токи в витках пассивной стабилизации плазмы; от датчиков Холла, измеряющих токи в обмотках индуктора, тороидального, полоидальных и горизонтального полей.
Выходными данными регуляторов системы магнитного управления плазмой являются значения электрических углов управления для тиристорных выпрямителей источников питания индуктора, тороидального и полоидальных полей, а также уставки для инвертора напряжения обмотки горизонтального поля.
Исходными параметрами при разработке сценария плазменного разряда являются:
1. Сценарий для тока плазмы: значение тока на стадии плато, длительность стадий ввода и вывода тока плазмы с ограничениями на скорость ввода max(dlp/dt).
2. Задание эволюции параметров (формы и положения) плазмы или задание конфигурации плазменного шнура в ключевые моменты развития сценария, и, если необходимо, положение «усов» сепаратрисы.
3. Уставки по допустимым значениям токов и напряжений в обмотках ЭМС.
4. Сценарии дополнительного нагрева плазмы и сценарий токов увлечения.
5. Настройка дополнительных параметров: профиль плотности плазмы, скейлинги, изотопный состав примесей и др.
Расчет сценария выполняется с использованием плазмофизического кода ДИНА. В результате моделирования создается набор файлов сценария разряда, необходимых для проведения эксперимента, в части магнитного управления это:
1. Сценарий токов в обмотках индуктора, тороидального и полоидальных полей.
2. Сценарий тока плазмы.
3. Сценарий положения магнитной оси.
4. Сценарии зазоров между крайней замкнутой магнитной поверхностью плазмы и заданными точками на первой стенке.
СУП токамака должна отработать этот сценарий разряда, выдавая скорректированные в реальном времени эксперимента уставки токов в управляющие обмотки, с учетом меняющихся параметров плазмы и ограничений системы управления.
Для кода восстановления входными данными служат значения сигналов электромагнитной диагностики (магнитных зондов, магнитных петель, поясов Роговского) и токи в обмотках управления. Выходными сигналами с контура восстановления являются рассчитанные геометрические параметры плазмы (смещения R и Z, зазоры), которые позволяют регулятору отрабатывать изменение положения плазмы и предотвращать развитие малых неустойчивостей.
В качестве выходных данных СУП для блоков управления системы импульсного электропитания (СИЭП) обмоток токамака используется массив значений электрических углов управления для тиристорных выпрямителей источников питания ОИ, ОТП и ОУ, уставки для инвертора напряжения ОГУП.
Совокупность описанных особенностей архитектуры системы управления и конфигурации ЭМС токамака позволяют обеспечить управление током плазмы, ее положением и формой.
Основными преимуществами предлагаемой системы являются:
1. Децентрализация системы автоматического управления, достигаемая за счет декомпозиции контуров управления, регуляторов и восстановительного кода, а также введения промежуточных блоков СИЭП для приведения токов в обмотках магнитного управления в соответствие с уставками, полученными от СУП. Такая архитектура системы управления обеспечивает возможность выполнения асинхронных кодов и регуляторов СУП на различных вычислительных средствах, а также упрощает реализацию программно-аппаратного моделирования СУП при отладке и подготовке к плазменному разряду.
2. Распределенность системы управления, необходима в условиях размещения оборудования токамака на большой территории.
3. Унификация выдаваемых СУП сигналов упрощает процессы отладки и введения в эксплуатацию предложенной системы управления.
4. Блоки СИЭП управления обмотками позволяют реализовать на их базе системы быстрых противоаварийных защит, помимо функций установки заданного электрическими углами тока в обмотках.
Изобретение относится к системе автоматического магнитного управления положением, формой и током плазмы в токамаке с диверторной конфигурацией. Система состоит из блока линеаризованного кода восстановления формы плазмы в реальном времени, соединенного каналом передачи рассчитанных геометрических параметров плазмы для отработки вертикальных неустойчивостей с блоком регулятора источника питания обмотки горизонтального управляющего поля (ОГУП) и каналом передачи рассчитанных геометрических параметров плазмы для расчета уставки управляющей величины с блоком регулятора источников питания обмотки индуктора (ОИ) и обмоток управления (ОУ), блока данных сценария разряда, соединенного каналами передачи референсного значения тока с блоком регулятора источников питания ОИ и ОУ, блоком регулятора источника питания обмотки тороидального магнитного поля и блоком регулятора источника питания ОГУП, блока датчиков электромагнитной диагностики (ЭМД), который каналом передачи сигналов, необходимых для расчета геометрических параметров плазмы, соединен с блоком линеаризованного кода восстановления формы плазмы в реальном времени. Для решения задачи управления формой плазмы применяются косвенные методы восстановления параметров формы по измерениям датчиков электромагнитной диагностики (ЭМД) для определения текущих значений управляемых параметров в реальном времени. Техническим результатом является повышение продолжительности и стабильности плазменного разряда в токамаке с диверторной конфигурацией в соответствии с заданным сценарием разряда. 2 ил.
Система автоматического магнитного управления положением, формой и током плазмы в токамаке с диверторной конфигурацией, состоящая из блока линеаризованного кода восстановления формы плазмы в реальном времени, соединенного каналом передачи рассчитанных геометрических параметров плазмы для отработки вертикальных неустойчивостей с блоком регулятора источника питания обмотки горизонтального управляющего поля и каналом передачи рассчитанных геометрических параметров плазмы для расчета уставки управляющей величины с блоком регулятора источников питания обмотки индуктора и обмоток управления, блока данных сценария разряда, соединенного каналами передачи референсного значения тока с блоком регулятора источников питания обмотки индуктора и обмотки управления, блоком регулятора источника питания обмотки тороидального магнитного поля и блоком регулятора источника питания обмотки горизонтального управляющего поля, блока датчиков электромагнитной диагностики, который каналом передачи сигналов, необходимых для расчета геометрических параметры плазмы, соединен с блоком линеаризованного кода восстановления формы плазмы в реальном времени, каналом передачи сигналов для расчета тока плазмы соединен с блоком регулятора источников питания обмотки индуктора и обмоток управления, а каналом передачи данных о величинах магнитных полей с блоком преобразователей датчиков электромагнитной диагностики, который каналом передачи сигналов, необходимых для обнаружения и предотвращения срывов и отработки сценария регулятора обмотки горизонтального управляющего поля, соединен с блоком регулятора источника питания обмотки горизонтального управляющего поля, блока управления источником питания обмотки индуктора, который каналом передачи электрического угла управления соединен с блоком источников питания обмотки индуктора, который каналом передачи напряжения соединен с блоком обмотки индуктора, который по каналу передачи индукции магнитного поля обмоток соединен с плазмой, соединенной по каналу регистрации данных о величинах магнитных полей с блоком датчиков электромагнитной диагностики, а по каналу регистрации действующего значения тока соединен с блоком датчиков тока в обмотке индуктора и обмотке управления, соединенным по каналу передачи действующего значения тока с блоком регулятора источников питания обмотки индуктора и обмотки управления, соединенным по каналу передачи управляющего воздействия с блоком управления источником питания обмотки индуктора, блока управления источником питания обмотки тороидального магнитного поля, который по каналу передачи электрического угла управления соединен с блоком источника питания обмотки тороидального магнитного поля, который по каналу передачи напряжения соединен с блоком обмотки тороидального магнитного поля, соединенным по каналу передачи индукции магнитного поля обмоток с плазмой, а по каналу регистрации действующего значения тока с блоком датчиков тока в обмотке тороидального магнитного поля и обмотке горизонтального управляющего поля, соединенным по каналам передачи действующего значения тока с блоком регулятора источника питания обмотки тороидального магнитного поля и блоком регулятора источника питания обмотки тороидального магнитного поля, который по каналу передачи уставки соединен с блоком управления источником питания обмотки тороидального магнитного поля по каналу передачи управляющего воздействия, соединенным с блоком источника питания обмотки тороидального магнитного поля по каналу передачи напряжения, соединенным с блоком обмотки тороидального магнитного поля, который по каналу регистрации данных о величинах магнитных полей обмоток соединен с плазмой, а по каналу регистрации действующего значения тока соединен с блоком датчиков тока в обмотке тороидального магнитного поля и обмотке горизонтального управляющего поля, а также из блока управления источником питания обмотки управления, который каналом передачи управляющего воздействия соединен с блоком регулятора источников питания обмотки индуктора и обмотки управления, а по каналу передачи электрического угла управления с блоком источников питания обмотки управления, который по каналу передачи напряжения соединен с блоком обмотки управления, соединенным с плазмой по каналу передачи индукции магнитного поля обмоток, а с блоком датчиков тока в обмотке управления и обмотке индуктора по каналу регистрации действующего значения тока.
| СПОСОБ ФОРМИРОВАНИЯ МОДЕЛИ МАГНИТНОГО УПРАВЛЕНИЯ ФОРМОЙ И ТОКОМ ПЛАЗМЫ С ОБРАТНОЙ СВЯЗЬЮ В ТОКАМАКЕ | 2018 |
|
RU2702137C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК СПЕКТРАЛЬНЫХ ЛИНИЙ ПЛАЗМЫ В РЕАКТОРЕ-ТОКАМАКЕ | 2016 |
|
RU2633517C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОННОЙ ПЛОТНОСТЬЮ ПЛАЗМЫ НА УСТАНОВКАХ ТИПА ТОКАМАК | 2017 |
|
RU2654518C1 |
| KR 1020090063595 A, 18.06.2009 | |||
| EP 4000088 A1, 25.05.2022 | |||
| СПОСОБ ФОРМИРОВАНИЯ КОМПАКТНОГО ПЛАЗМОИДА | 2012 |
|
RU2523427C1 |
| ЭЛЕКТРОМАГНИТНАЯ СИСТЕМА ТОКАМАКА | 1996 |
|
RU2107338C1 |

