Изобретение относится к способам магнитного управления плазмой в токамаках (тороидальных камерах с магнитными катушками) с обратной связью. При этом магнитному управлению подвергаются положение, ток и форма плазмы с алгоритмом восстановления равновесия плазмы в обратной связи и может быть применено для стабилизации положения сепаратрисы плазмы на диверторной фазе разрядов при отражении действия возмущений типа малого срыва в токамаках.
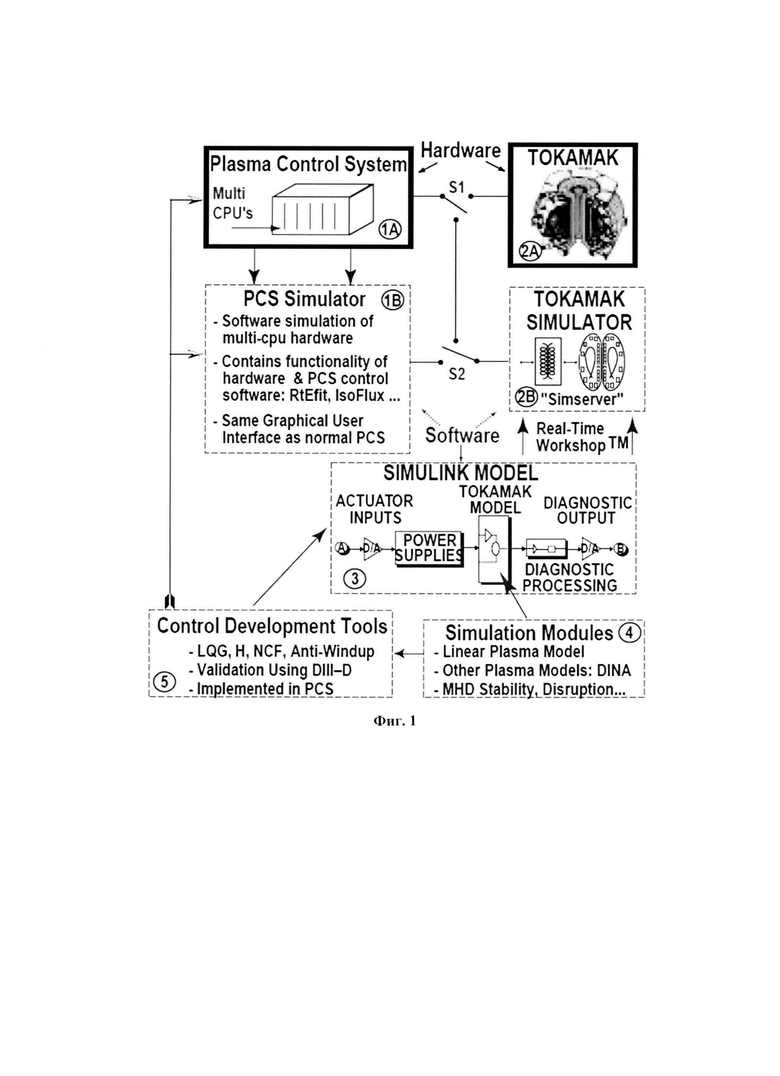
Известен способ и устройство магнитного управления плазмой в токамаке, в котором используются цифровая система управления плазмой, симулятор системы управления плазмой (модель системы управления), симулятор (модель) самого токамака, которые работают в реальном времени (фиг. 1) (R.D. Deranian, J.R. Ferron, D.A. Humphreys, R.D. Johnson et al. Integrated Plasma Control in Next-Generation Devices. Using DIII-D Modeling and Simulation Approaches. General Atomics Report GA-A24818. 2004). Такой набор составляющих способа управления может применяться в различных сочетаниях: (1А2А) экспериментальное управление токамаком, (1А2В) моделирование "аппаратного контура" (hardware-in-the-loop simulations) и (1В2В) полное программное моделирование системы замкнутого контура. Но такой способ управления плазмой имеет недостаток, заключающийся в том, что система управления не содержит внутренней модели объекта управления, что не позволят предварительно настроить систему на внутренней модели, а затем переключить на внешнюю модель для отработки полного контура управления объектом в реальном времени. Это нужно, чтобы после отработки полного контура управления переключить систему управления на сам объект управления для гарантированного обеспечения работоспособности всей системы управления в целом и достижения необходимых характеристик системы управления: запасов устойчивости, быстродействия и точности.
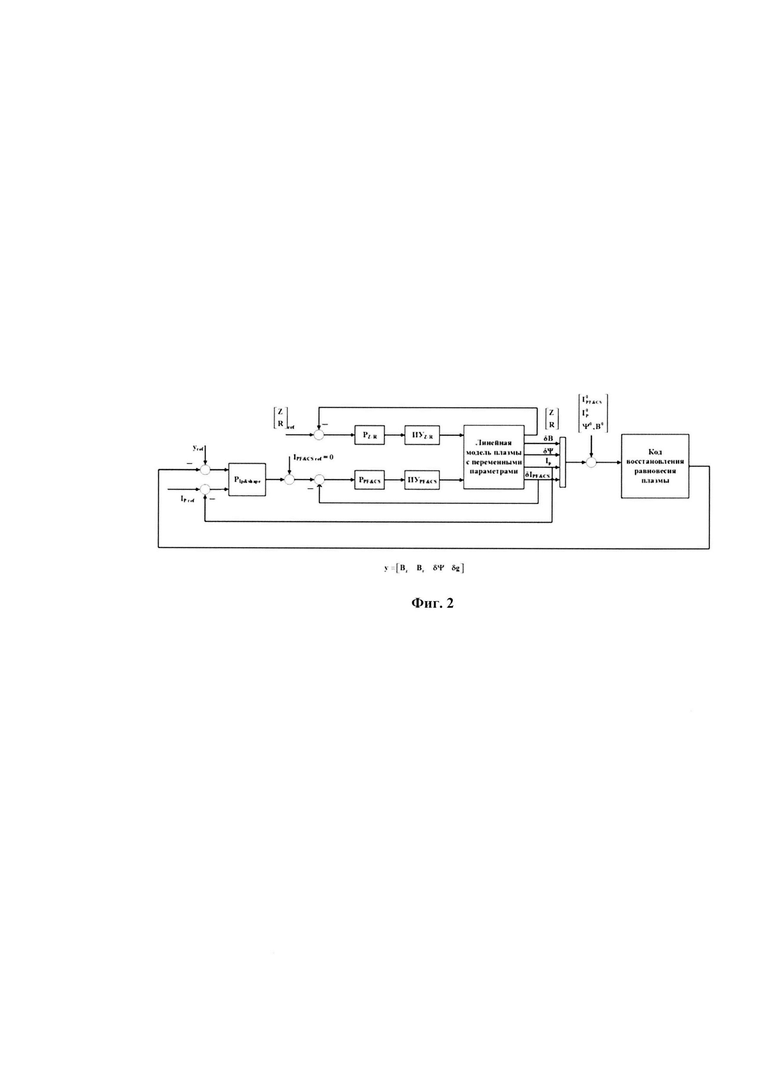
Наиболее близким к изобретению по технической сущности является способ и устройство управления плазмой, в котором при моделировании в реальном времени в замкнутом контуре управления положением, током и формой плазмы используется код (алгоритм) восстановления равновесия плазмы по измерениям вне плазмы (фиг. 2) (RU 2702137 C1, 04.10.2019). Эта идея прототипа расширяется в предлагаемом изобретении, когда создается конфигурация из трех промышленных компьютеров, дающая возможность моделировать в реальном времени замкнутую систему управления плазмой в токамаке с подключением управляющего компьютера на токамак для непосредственного управления плазмой. Недостатком прототипа является отсутствие такой конфигурации, что не позволяет отрабатывать алгоритмы управления в реальном времени с максимальным приближением к реальным условиям работы системы управления с плазмой токамака с последующим применением отработанных алгоритмов реального времени непосредственно для управления плазмой на токамаке.
Технической проблемой заявленного изобретения является преодоление технических недостатков, присущих аналогам, что ведет к необходимости создания способа магнитного управления плазмой в токамаке в реальном времени с расширенными возможностями настройки системы управления плазмой в реальном времени с последующим переключением на объект управления.
Техническим результатом заявленного изобретения по способу и устройству является существенное расширение возможностей настройки системы магнитного управления плазмой в токамаках с максимальным приближением систем управления к реальному эксперименту.
Технический результат по способу достигается тем, что способ магнитного управления плазмой в токамаках в реальном времени включает имитацию плазмы в токамаке в реальном времени с диагностикой, исполнительными устройствами, контурами управления горизонтальным и вертикальным положением плазмы и токами в обмотках полоидального поля как модель объекта управления на трех промышленным компьютерах с устройствами связи с объектом управления,
на первом промышленном компьютере имитируют модель объекта управления, а на двух других промышленных компьютерах имитируют модель объекта управления и регулятор тока и формы плазмы, соединенных между собой в контур внутренней обратной связи с алгоритмом восстановления равновесия на входе регулятора,
при этом во втором и третьем промышленных компьютерах применяют по два многомерных переключателя, посредством которых переключают на втором компьютере регулятор с внутренней модели на внешнюю модель объекта и обратно для настройки системы управления на внутренней модели объекта и отработки ее на внешней модели объекта, которая моделируется на первом промышленном компьютере, и позволяет имитировать вместе с подключенным к ней регулятором второго компьютера реальный физический эксперимент на токамаке,
к каждому из трех промышленных компьютеров подключают автоматизированное рабочее место, состоящее из персонального компьютера для разработки и моделирования систем управления плазмой в компьютерном времени с дисплеем для визуализации моделирования процессов управления плазмой, осуществляют загрузку из персональных компьютеров разработанных регуляторов и моделей плазмы в промышленные компьютеры, а также к трем промышленным компьютерам подключают дисплеи для визуализации внутренних процессов управления в реальном времени,
к каждому из трех персональных компьютеров подключают сервер базы данных, посредством которого для всех автоматизированных рабочих мест загружают данные для разработки систем управления плазмой в компьютерном времени с дальнейшей загрузкой в промышленные компьютеры для целей моделирования систем управления плазмой в реальном времени и управления плазмой в реальном времени,
третий промышленный компьютер с автоматизированным рабочим местом и дисплеем устанавливают и подключают непосредственно к токамаку, настраивают регулятор с алгоритмом восстановления равновесия плазмы на его входе на внутренней модели объекта в реальном времени, переключают его на токамак и управляют током и формой плазмой в реальном времени в течении плазменных разрядов,
для развития систем управления плазмой посредством удаленного доступа изменяют регулятор в третьем промышленном компьютере на новый регулятор, настраивают его на внутренней модели объекта и переключают на управление плазмой в токамаке в реальном времени посредством двух многомерных переключателей.
Технический результат по устройству достигается тем, что устройство магнитного управления плазмой в токамаках в реальном времени содержит токамак в виде тороидальной камеры с магнитными катушками, диагностикой, исполнительными устройствами, контурами управления горизонтальным и вертикальным положением плазмы и токами в обмотках полоидального поля как объект управления, *при этом управляющее устройство состоит из трех промышленных компьютеров, на первом промышленном компьютере в реальном времени моделируется внешняя модель объекта управления, вход которой соединен через первый многомерный переключатель с выходом регулятора второго промышленного компьютера, а выход соединен с отрицательным входом первого сумматора через второй многомерный переключатель второго промышленного компьютера, выход регулятора подключен через первый многомерный переключатель со входом внутренней модели, выход которой соединен через второй многомерный переключатель со отрицательным входом сумматора, положительный вход сумматора соединен с генератором задающее воздействие внутри второго промышленного компьютера, выход первого сумматора подключен ко входу регулятора, вход первого промышленного компьютера соединен с выходом первого автоматизированного рабочего места, а первый выход с первым дисплеем, второй выход первого промышленного компьютера соединен со входом сервера, первый выход которого подключен ко входу второго автоматизированного рабочего места, выход этого автоматизированного рабочего места соединен со вторым дисплеем, причем другой выход соединен со вторым входом внешней модели,
причем второй выход сервера дистанционно подключен к первому входу третьего автоматизированного рабочего места, выход которого подключен ко входу третьего промышленного компьютера, соединенного своим выходом с четвертым дисплеем, вход токамака через третий многомерный переключатель соединен с выходом регулятора, который через тот же многомерный переключатель подключен ко входу второй внутренней модели объекта управления, а выход этой модели через четвертый многомерный переключатель соединен с отрицательным входом второго сумматора, другой положительный вход сумматора соединен с генератором задающего воздействия внутри третьего промышленного компьютера, а выход соединен со входом второго регулятора, другой выход третьего автоматизированного рабочего места соединен с пятым дисплеем.
На фиг. 1 - схема компонентов моделирования и управления плазмой в токамаке - аналог.
На фиг. 2 - схема моделирования системы управления положением, током и формой плазмы с алгоритмом восстановления равновесия плазмы в обратной связи - прототип.
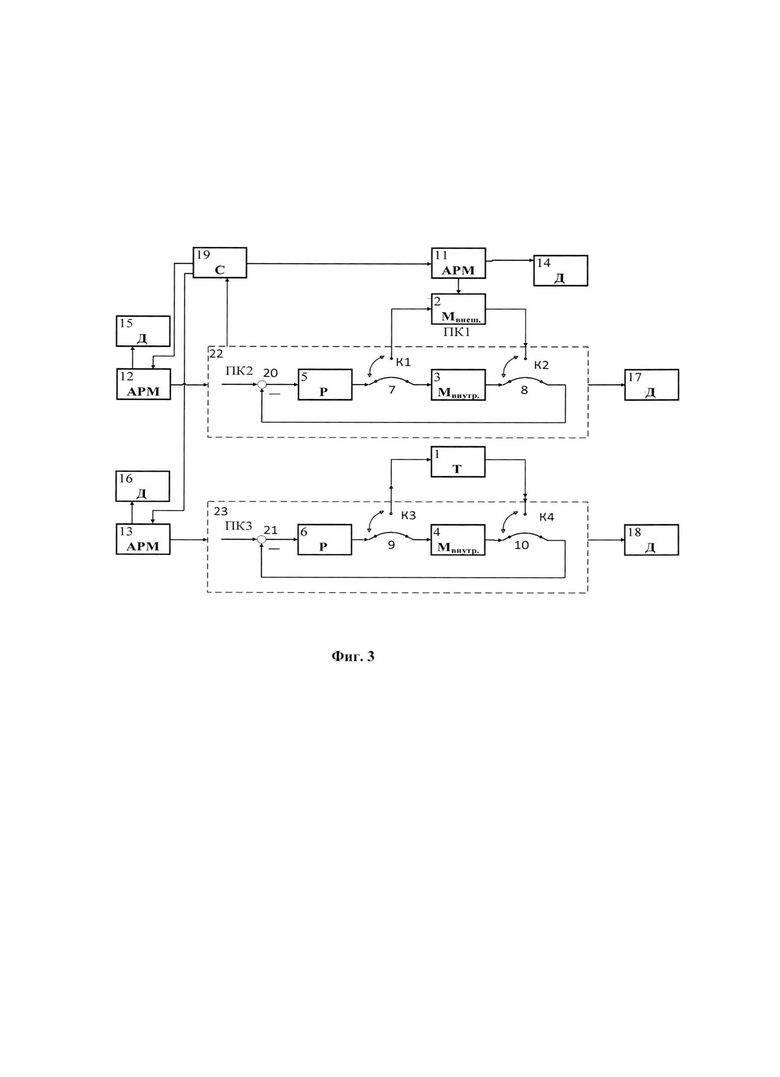
На фиг. 3 - общая схема заявляемого устройства.
Устройство содержит токамак 1, внешнюю модель объекта управления (первый промышленный компьютер) 2, первую 3 и вторую 4 внутренние модели объекта управления, пятый 5 и шестой 6 регуляторы, седьмой 7, восьмой 8, девятый 9 и десятый 10 многомерные переключатели, одиннадцатое 11, двенадцатое 12, тринадцатое 13 автоматизированные рабочие места, четырнадцатый 14, пятнадцатый 15, шестнадцатый 16, семнадцатый 17 и восемнадцатый 18 дисплеи, девятнадцатый 19 сервер, двадцатый 20 и двадцать первый 21 сумматоры, двадцать второй 22 и двадцать третий 23 промышленные компьютеры.
На фиг. 3 показано: С - сервер, АРМ - автоматизированное рабочее место, Д - дисплей, ПК - промышленный компьютер, Р - регулятор, Мвнутр. - внутренняя модель объекта, Мвнеш. - внешняя модель объекта, К1, К2, К3, К4 - многомерные переключатели.
Способ магнитного управления плазмой в токамаках в реальном времени включает имитацию плазмы в токамаке 1 в реальном времени с диагностикой, исполнительными устройствами, контурами управления горизонтальным и вертикальным положением плазмы и токами в обмотках полоидального поля как модель объекта управления на трех промышленным компьютерах 2, 22 и 23 с устройствами связи с объектом управления.
На первом промышленном компьютере 2 имитируют модель объекта управления, а на двух других промышленных компьютерах 22 и 23 имитируют модели объекта управления 3 и 4 и регуляторы тока и формы плазмы 5 и 6, соединенных между собой в контур внутренней обратной связи с алгоритмом восстановления равновесия на входе регулятора, а во втором 22 и третьем 23 промышленных компьютерах применяют по два многомерных переключателя 7, 8 и 9, 10, посредством которых переключают на втором компьютере 22 регулятор 5 с внутренней модели 3 на внешнюю модель объекта 2 и обратно для настройки системы управления на внутренней модели объекта 3 и отработки ее на внешней модели объекта 2, которая моделируется на первом промышленном компьютере 2, и позволяет имитировать вместе с подключенным к ней регулятором 5 второго компьютера 22 реальный физический эксперимент на токамаке 1.
К каждому из трех промышленных компьютеров 2, 22 и 23 подключают автоматизированное рабочее место 11, 12 и 13, состоящее из персонального компьютера для разработки и моделирования систем управления плазмой в компьютерном времени с одним из дисплеев 14, 15 и 16 для визуализации моделирования процессов управления плазмой, осуществляют загрузку из персональных компьютеров автоматизированных рабочих мест 12 и 13 разработанных регуляторов 5 и 6 и моделей плазмы 3 и 4 в промышленные компьютеры 22 и 23, а также к трем промышленным компьютерам 2, 22 и 23 подключают дисплеи 14, 17 и 18 для визуализации внутренних процессов управления в реальном времени.
При этом к каждому из трех персональных компьютеров автоматизированных рабочих мест 11, 12 и 13 подключают сервер базы данных 19, посредством которого для всех автоматизированных рабочих мест 11, 12 и 13 загружают данные для разработки систем управления плазмой в компьютерном времени с дальнейшей загрузкой в промышленные компьютеры 2, 22 м 23 для целей моделирования систем управления плазмой в реальном времени и управления плазмой в реальном времени.
Для осуществления управления плазмой в токамаке 1 третий промышленный компьютер 23 с автоматизированным рабочим местом 13 и дисплеем 18 устанавливают и подключают непосредственно к токамаку, настраивают регулятор 6 с алгоритмом восстановления равновесия плазмы на его входе на внутренней модели объекта 4 в реальном времени, переключают его на токамак 1 посредством переключателей 9 и 10 и управляют током и формой плазмой в реальном времени в течении плазменных разрядов.
Для развития систем управления плазмой посредством удаленного доступа изменяют регулятор 6 в третьем промышленном компьютере 23 на новый регулятор 6, настраивают его на внутренней модели объекта 4 и переключают на управление плазмой в токамаке 1 в реальном времени посредством двух многомерных переключателей 9 и 10.
Заявляемый способ может быть применен для стабилизации положения сепаратрисы плазмы в вытянутых по вертикали токамаках при отражении действия возмущений типа малого срыва, а также заданию траектории движения сепаратрисы плазмы в течение диверторной фазы разряда.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ МОДЕЛИ МАГНИТНОГО УПРАВЛЕНИЯ ФОРМОЙ И ТОКОМ ПЛАЗМЫ С ОБРАТНОЙ СВЯЗЬЮ В ТОКАМАКЕ | 2018 |
|
RU2702137C1 |
| СПОСОБ ИМПУЛЬСНОГО ЦИФРОВОГО КАСКАДНОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ПЛАЗМЫ В D-ОБРАЗНОМ ТОКАМАКЕ | 2022 |
|
RU2788188C1 |
| СИСТЕМА УПРАВЛЕНИЯ НЕУСТОЙЧИВОСТЬЮ ВНУТРЕННЕГО СРЫВА ПЛАЗМЫ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ В УСТАНОВКАХ ТИПА ТОКАМАК | 2017 |
|
RU2668231C1 |
| Устройство для отладки программ цифровых процессоров обработки аналоговых сигналов | 1988 |
|
SU1640696A1 |
| ТРЕНАЖЕР ОПЕРАТОРА СИСТЕМ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ | 1991 |
|
RU2012065C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОННОЙ ПЛОТНОСТЬЮ ПЛАЗМЫ НА УСТАНОВКАХ ТИПА ТОКАМАК | 2017 |
|
RU2654518C1 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ОРБИТАЛЬНОГО УЗЛОВОГО МОДУЛЯ РОССИЙСКОГО СЕГМЕНТА МЕЖДУНАРОДНОЙ КОСМИЧЕСКОЙ СТАНЦИИ | 2012 |
|
RU2506647C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ИДЕНТИФИКАЦИИ ОБЪЕКТА И РЕГИСТРАЦИИ ЕГО СОСТОЯНИЯ | 2011 |
|
RU2444055C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА С НЕЙРО-НЕЧЕТКОЙ СЕТЬЮ ДЛЯ КОМПЛЕКСНОЙ ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ И УПРАВЛЕНИЯ СУДОВОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2020 |
|
RU2737457C1 |
| Система автоматического управления напуском рабочих и технологических газов в различных режимах работы установки типа токамак | 2023 |
|
RU2799504C1 |
Изобретение относится к способу магнитного управления формой и током плазмы с обратной связью в вытянутых по вертикали токамаках. Способ состоит в выполнении двух взаимодействующих промышленных компьютеров в виде соединения обратной связью (цифрового двойника системы управления) и удаленно связанного с третьим промышленным компьютером, соединенным непосредственно обратной связью с объектом управления - токамаком с высокотемпературной плазмой. Один компьютер в обратной связи цифрового двойника выполняет роль объекта управления, т.е. является внешней моделью объекта управления, а второй компьютер - роль регулятора (управляющего устройства с алгоритмом восстановления равновесия плазмы на входе и имеющего внутреннюю модель). Регуляторы внешней модели и токамака настраиваются на своих внутренних моделях с наибольшим приближением к реальному токамаку с плазмой, чтобы при переключении на внешнюю модель и токамак обеспечить гарантированную работоспособность системы управления с наибольшими запасами устойчивости, с предельно возможными точностью и быстродействием. Отработанные алгоритмы управления на цифровом двойнике передаются по удаленной связи на регулятор токамака. Техническим результатом является расширение возможностей настройки системы магнитного управления плазмой в токамаках с максимальным приближением систем управления к реальному эксперименту с оптимизацией их параметров и характеристик, с возможностью стабилизации положения сепаратрисы плазмы при отражении действия возмущений типа малого срыва, и задания траектории движения сепаратрисы плазмы в течение диверторной фазы разряда. 2 н.п. ф-лы, 3 ил.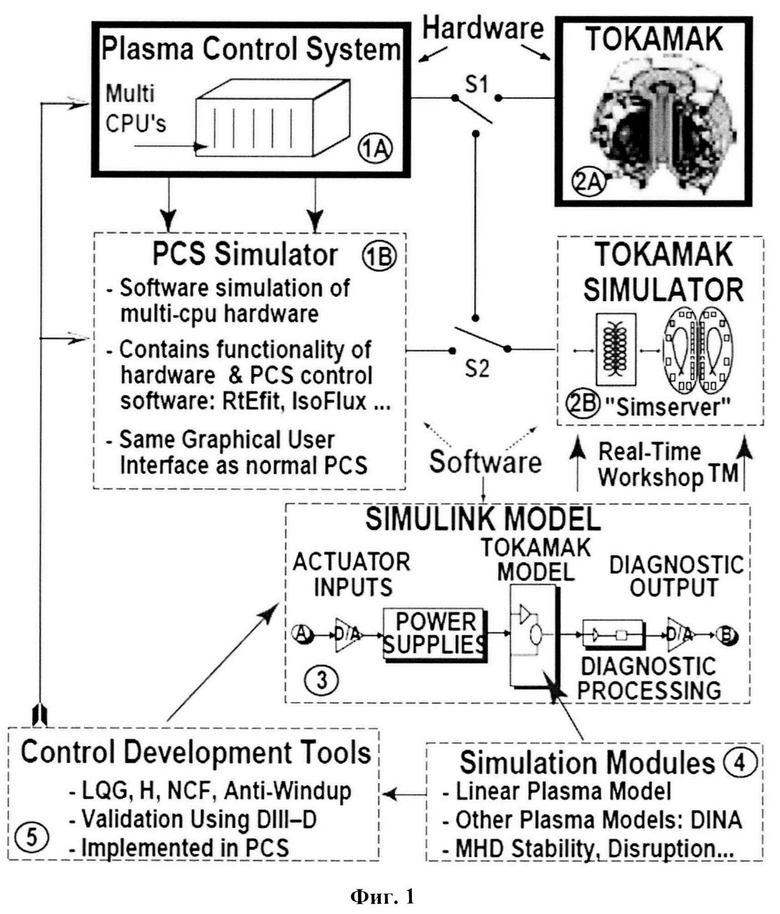
1. Способ магнитного управления плазмой в токамаках в реальном времени, характеризующийся тем, что включает имитацию плазмы в токамаке в реальном времени с диагностикой, исполнительными устройствами, контурами управления горизонтальным и вертикальным положением плазмы и токами в обмотках полоидального поля как модель объекта управления на трех промышленных компьютерах с устройствами связи с объектом управления,
при этом на первом промышленном компьютере имитируют модель объекта управления, а на двух других промышленных компьютерах имитируют модель объекта управления и регулятор тока и формы плазмы, соединенных между собой в контур внутренней обратной связи с алгоритмом восстановления равновесия на входе регулятора,
а во втором и третьем промышленных компьютерах применяют по два многомерных переключателя, посредством которых переключают на втором компьютере регулятор с внутренней модели на внешнюю модель объекта и обратно для настройки системы управления на внутренней модели объекта и отработки ее на внешней модели объекта, которая моделируется на первом промышленном компьютере, и позволяет имитировать вместе с подключенным к ней регулятором второго компьютера реальный физический эксперимент на токамаке,
причем к каждому из трех промышленных компьютеров подключают автоматизированное рабочее место, состоящее из персонального компьютера для разработки и моделирования систем управления плазмой в компьютерном времени с дисплеем для визуализации моделирования процессов управления плазмой, осуществляют загрузку из персональных компьютеров разработанных регуляторов и моделей плазмы в промышленные компьютеры, а также к трем промышленным компьютерам подключают дисплеи для визуализации внутренних процессов управления в реальном времени,
к каждому из трех персональных компьютеров подключают сервер базы данных, посредством которого для всех автоматизированных рабочих мест загружают данные для разработки систем управления плазмой в компьютерном времени с дальнейшей загрузкой в промышленные компьютеры для целей моделирования систем управления плазмой в реальном времени и управления плазмой в реальном времени,
третий промышленный компьютер с автоматизированным рабочим местом и дисплеем устанавливают и подключают непосредственно к токамаку, настраивают регулятор с алгоритмом восстановления равновесия плазмы на его входе на внутренней модели объекта в реальном времени, переключают его на токамак и управляют током и формой плазмы в реальном времени в течении плазменных разрядов,
для развития систем управления плазмой посредством удаленного доступа изменяют регулятор в третьем промышленном компьютере на новый регулятор, настраивают его на внутренней модели объекта и переключают на управление плазмой в токамаке в реальном времени посредством двух многомерных переключателей.
2. Устройство магнитного управления плазмой в токамаках в реальном времени, характеризующееся тем, что содержит токамак в виде тороидальной камеры с магнитными катушками, диагностикой, исполнительными устройствами, контурами управления горизонтальным и вертикальным положением плазмы и токами в обмотках полоидального поля как объект управления,
при этом управляющее устройство состоит из трех промышленных компьютеров, на первом промышленном компьютере в реальном времени моделируется внешняя модель объекта управления, вход которой соединен через первый многомерный переключатель с выходом регулятора второго промышленного компьютера, а выход соединен с отрицательным входом первого сумматора через второй многомерный переключатель второго промышленного компьютера, выход регулятора соединен через первый многомерный переключатель со входом внутренней модели, выход которой соединен через второй многомерный переключатель с отрицательным входом сумматора, положительный вход сумматора соединен с генератором задающего воздействия внутри второго промышленного компьютера, выход первого сумматора подключен ко входу регулятора второго промышленного компьютера, второй вход первого промышленного компьютера соединен с первым выходом первого автоматизированного рабочего места, а второй выход первого автоматизированного рабочего места соединен со входом первого дисплея,
второй выход второго промышленного компьютера соединен со входом сервера, первый выход которого соединен со входом первого автоматизированного рабочего места, а второй выход сервера подключен ко входу второго автоматизированного рабочего места, выход этого автоматизированного рабочего места соединен со вторым дисплеем, причем другой выход соединен со вторым входом второго промышленного компьютера,
причем третий выход сервера дистанционно подключен ко входу третьего автоматизированного рабочего места, один выход которого соединен со входом третьего дисплея, а другой выход подключен ко входу третьего промышленного компьютера, соединенного своим выходом с четвертым дисплеем,
вход токамака через третий многомерный переключатель соединен с выходом второго регулятора, который через тот же многомерный переключатель подключен ко входу второй внутренней модели объекта управления, а выход этой модели через четвертый многомерный переключатель соединен с отрицательным входом второго сумматора, другой положительный вход этого сумматора соединен с генератором задающего воздействия внутри третьего промышленного компьютера, а выход соединен со входом второго регулятора, другой выход третьего автоматизированного рабочего места соединен с пятым дисплеем.
| СПОСОБ ФОРМИРОВАНИЯ МОДЕЛИ МАГНИТНОГО УПРАВЛЕНИЯ ФОРМОЙ И ТОКОМ ПЛАЗМЫ С ОБРАТНОЙ СВЯЗЬЮ В ТОКАМАКЕ | 2018 |
|
RU2702137C1 |
| R.D | |||
| Deranian, J.R | |||
| Ferron, D.A | |||
| Humphreys, R.D | |||
| Johnson et al | |||
| Integrated Plasma Control in Next-Generation Devices | |||
| Using DIII-D Modeling and Simulation Approaches | |||
| Глубокорасположенная оправа для электродов закрытых электрических печей | 1926 |
|
SU24818A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Павлов В.М., Система управления плазмой: учебное пособие,Томск: Изд-во Томского политехнического университета, | |||

