Изобретение относится к электротехнике, а именно к релейной защите и автоматике, и может применяться в измерительных органах различных защит и противоаварийной автоматики.
Известен способ определения частоты электрической величины асинхронного режима, реализованный в устройстве (SU 840922 А1, опубликовано 23.06.1981), согласно которому электрическую величину преобразуют в цифровой сигнал путем измерения в равномерно фиксированные моменты времени и выделяют ортогональные составляющие гармоники электрической величины посредством фильтра Фурье, настроенного на промышленную частоту. Этот фильтр обычно применяется для оценки усредненной частоты асинхронного режима, и он в принципе не может определить частоты слагаемых цифрового сигнала асинхронного режима.
От этого недостатка свободен способ разделения слагаемых электрической величины, реализованный в устройстве (RU 2012086 С1, опубликовано 30.04.1994), в котором электрическую величину преобразуют в цифровой сигнал путем его измерения в равномерно фиксированные моменты времени, настраивают адаптивный фильтр на полное подавление цифрового сигнала и по корням характеристического уравнения фильтра определяют оценки частот слагаемых цифрового сигнала.
Фильтр способен оценивать частоты только тех слагаемых цифрового сигнала, частоты которых существенно различаются. Поэтому при близких частотах слагаемых эффективность распознавания структуры сигнала снижается; при этом даже увеличение порядка фильтра не обеспечивает необходимой разрешающей способности фильтра.
Этот способ является наиболее близким к заявленному изобретению и принят в качестве прототипа.
Техническим результатом предлагаемого изобретения является повышение разрешающей способности способа при определении частот слагаемых электрической величины асинхронного режима благодаря применению в адаптивном фильтре внутримодельной децимации с настраиваемым шагом децимации.
С этой целью в известном способе разделения слагаемых электрической величины, согласно которому электрическую величину преобразуют в цифровой сигнал путем измерения в равномерно фиксированные моменты времени, настраивают адаптивный фильтр на полное подавление цифрового сигнала и по корням характеристического уравнения фильтра в блоке определения частот определяют оценки частот слагаемых цифрового сигнала, с целью повышения разрешающей способности способа адаптивный фильтр выполняется с внутримодельной децимацией отсчетов цифрового сигнала с настраиваемым шагом децимации. Для этого в блоке выявления частот асинхронного режима из совокупности оценок частот цифрового сигнала выделяют оценки частот, принадлежащие диапазону заданной величины с центром в точке, соответствующей номинальной частоте. В блоке частоты скольжения формируют сигнал частоты скольжения, пропорциональный разности этих оценок частот, и в схеме настройки децимации контролируют его уровень компаратором частоты. Блок выбора децимации задает величину шага децимации для следующего этапа настройки адаптивного фильтра в зависимости от состояния компаратора. При срабатывании компаратора шаг децимации принимается равным заданному значению, а иначе - значению на выходе определителя шага децимации, в котором шаг децимации выбирается исходя из условия обеспечения выше заданной уставки значения коэффициента передачи канонического фильтра гармоники номинальной частоты на частоте, отличающейся от номинальной на частоту скольжения.
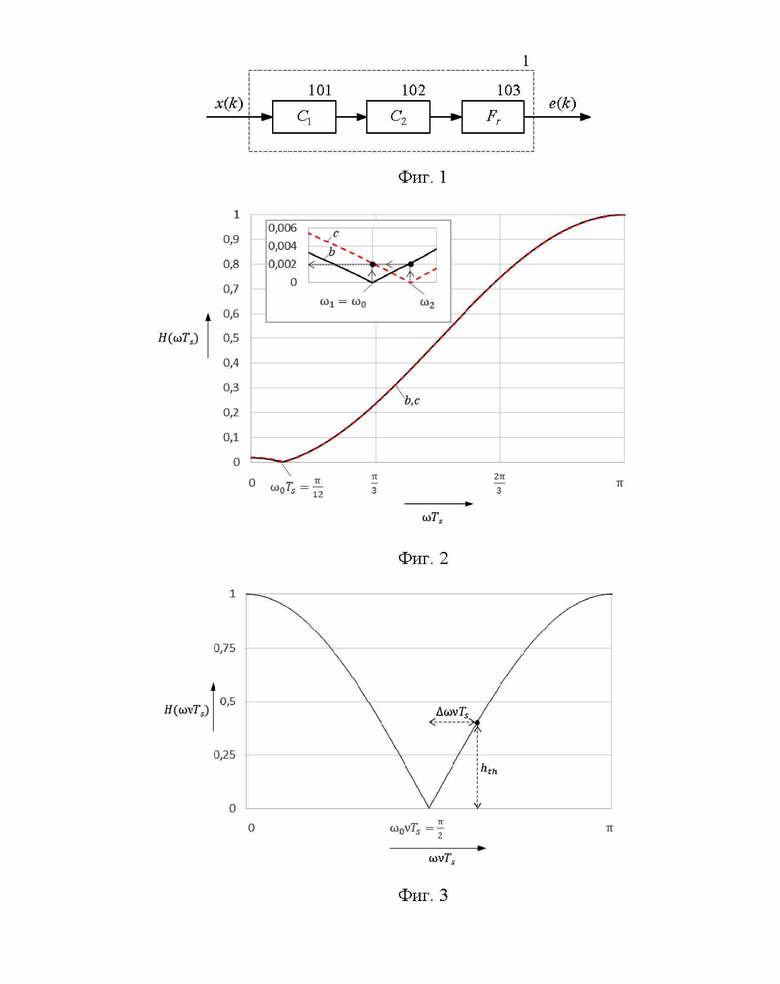
На фиг. 1 приведена условная блок-схема адаптивного фильтра 1, настроенного на заграждение сигнала х(k). Она включает в себя канонические фильтры 101 и 102 слагаемых цифрового сигнала асинхронного режима частот ω1 и ω2 и фильтр шума 103. Такое представление фильтра носит чисто методический характер и возможно только после полной настройки фильтра 1.
На фиг. 2 изображены амплитудно-частотные характеристики канонических фильтров 101 и 102 слагаемых цифрового сигнала асинхронного режима без внутримодельной децимации: кривые b и с представляют собой характеристики канонических фильтров слагаемых сигнала частот ω1 и ω2 соответственно. Характеристики приведены к одному базису относительно коэффициента передачи фильтра 101 на нормированной частоте ωTs=π, где Ts - период дискретизации сигнала x(t). В принятом масштабе характеристики b и с неотличимы на общем графике.
На фиг. 3 изображена амплитудно-частотная характеристика канонического фильтра гармоники номинальной частоты ω0 с внутримодельной децимацией с шагом ν. Характеристика нормирована относительно его коэффициента передачи на частоте ωνTs=π.
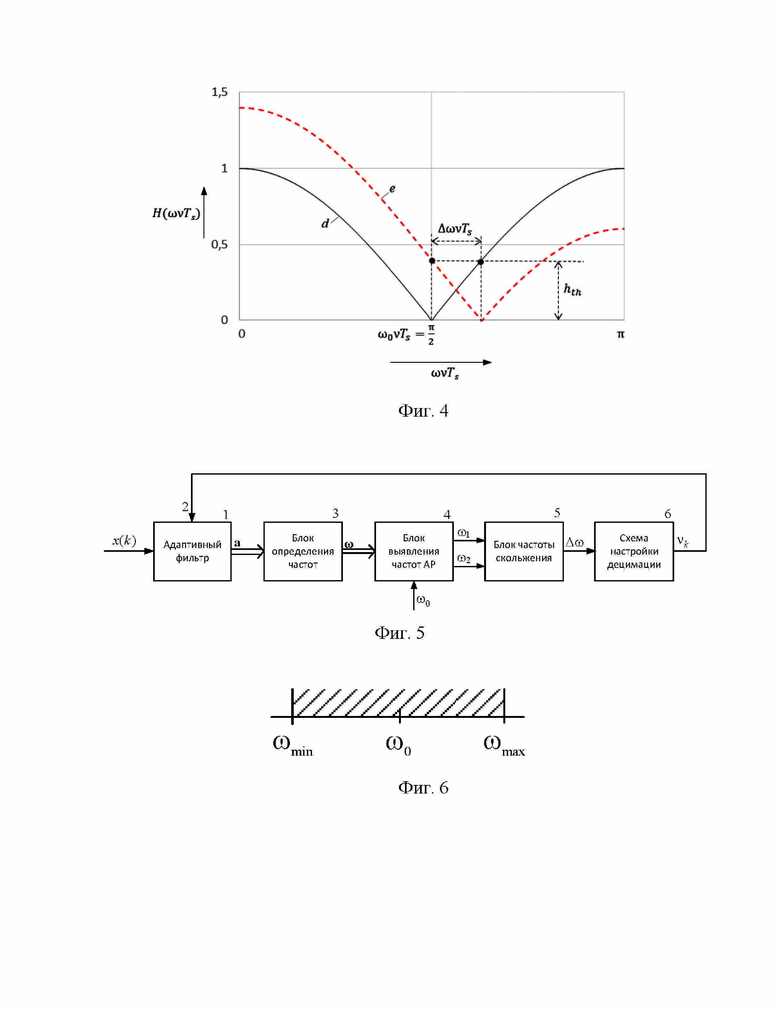
На фиг. 4 изображены амплитудно-частотные характеристики d и e канонических фильтров 101 и 102 (фиг. 1) слагаемых цифрового сигнала асинхронного режима частот ω0 и ω0+Δω при внутримодельной децимации с шагом ν=78. Характеристики нормированы относительно коэффициента передачи канонического фильтра слагаемой номинальной частоты ω0 на частоте ωνTs=π.
На фиг. 5 представлена блок-схема, реализующая способ. Она включает в себя адаптивный фильтр 1, к входу которого подводят цифровой сигнал х(k), полученный путем измерения электрической величины x(t) в равномерно фиксированные моменты времени с периодом дискретизации Ts. Электрической величиной x(t) может быть любой из фазных напряжений или токов трехфазной электрической сети. Адаптивный фильтр выполняется с внутримодельной децимацией с шагом νk. Сигнал, пропорциональный шагу децимации νk, поступает на его дополнительный вход 2. Многоканальный сигнал а, объединяющий в себе сигналы, пропорциональные коэффициентам адаптивного фильтра, подается на вход блока определения частот 3. Последний решает характеристическое уравнение и определяет оценки частот слагаемых цифрового сигнала, формируя совокупность оценок  . В блоке выявления частот асинхронного режима 4 из совокупности оценок частот
. В блоке выявления частот асинхронного режима 4 из совокупности оценок частот  отбираются частоты
отбираются частоты  и
и  , принадлежащие диапазону заданной величины с центром в точке, соответствующей номинальной частоте ω0. Это положение иллюстрируется фиг. 6. В блоке частоты скольжения 5 определяется частота скольжения как разность оценок и :
, принадлежащие диапазону заданной величины с центром в точке, соответствующей номинальной частоте ω0. Это положение иллюстрируется фиг. 6. В блоке частоты скольжения 5 определяется частота скольжения как разность оценок и :

Величина частоты скольжения  напрямую влияет на выбор шага децимации νk для следующего этапа настройки адаптивного фильтра 1; сам шаг децимации определяется схемой настройки децимации 6.
напрямую влияет на выбор шага децимации νk для следующего этапа настройки адаптивного фильтра 1; сам шаг децимации определяется схемой настройки децимации 6.
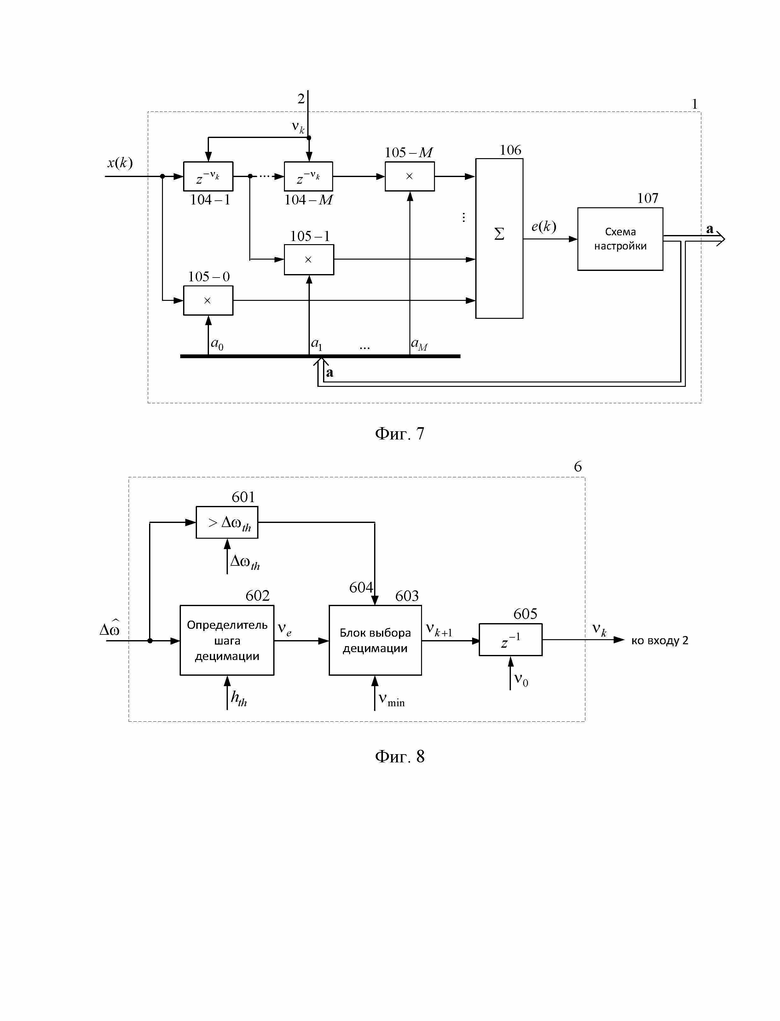
На фиг. 7 приведена возможная блок-схема адаптивного фильтра 1. Внутримодельную децимацию отсчетов входного сигнала выполняют с помощью блоков задержки 104-(1-М), каждый из которых задерживает отсчет сигнала на νk периодов дискретизации; М - порядок фильтра. Невязку адаптивного фильтра е(k) формируют путем взвешивания отсчетов на выходе блоков задержки 104-(1-М) с весами, равными коэффициентам фильтра а=[a0, а1, …,аM] предыдущего этапа настройки. Сигнал невязки появляется на выходе сумматора 106, как сумма сигналов с выхода умножителей 105-(0-М). Коэффициенты а подбираются схемой настройки 107 одним из методов оптимизации, например, методом наименьших квадратов. Один из коэффициентов, например a0=1, фиксируют во избежание тривиального решения.
На фиг. 8 изображена схема настройки децимации 6. Ее входным сигналом является сигнал частоты скольжения  . Уровень входного сигнала одновременно контролируется компаратором частоты 601 с порогом Δωth и определителем шага децимации 602 с уставкой hth- Свой выходной сигнал νk+1 блок выбора децимации 603 формирует в зависимости от состояния компаратора частоты 601. При поступлении сигнала срабатывания компаратора частоты 601 на вход 604 выходной сигнал блока выбора децимации 603 принимает заранее определенное значение νmin, иначе - значение νe, равное сигналу на выходе блока 602. Блок задержки 605 обеспечивает доставку сигнала схемы настройки децимации 6 к дополнительному входу 2 адаптивного фильтра 1 на следующем этапе настройки. На начальном этапе настройки адаптивного фильтра выходной сигнал блока задержки 605 соответствует значению шага децимации ν0.
. Уровень входного сигнала одновременно контролируется компаратором частоты 601 с порогом Δωth и определителем шага децимации 602 с уставкой hth- Свой выходной сигнал νk+1 блок выбора децимации 603 формирует в зависимости от состояния компаратора частоты 601. При поступлении сигнала срабатывания компаратора частоты 601 на вход 604 выходной сигнал блока выбора децимации 603 принимает заранее определенное значение νmin, иначе - значение νe, равное сигналу на выходе блока 602. Блок задержки 605 обеспечивает доставку сигнала схемы настройки децимации 6 к дополнительному входу 2 адаптивного фильтра 1 на следующем этапе настройки. На начальном этапе настройки адаптивного фильтра выходной сигнал блока задержки 605 соответствует значению шага децимации ν0.
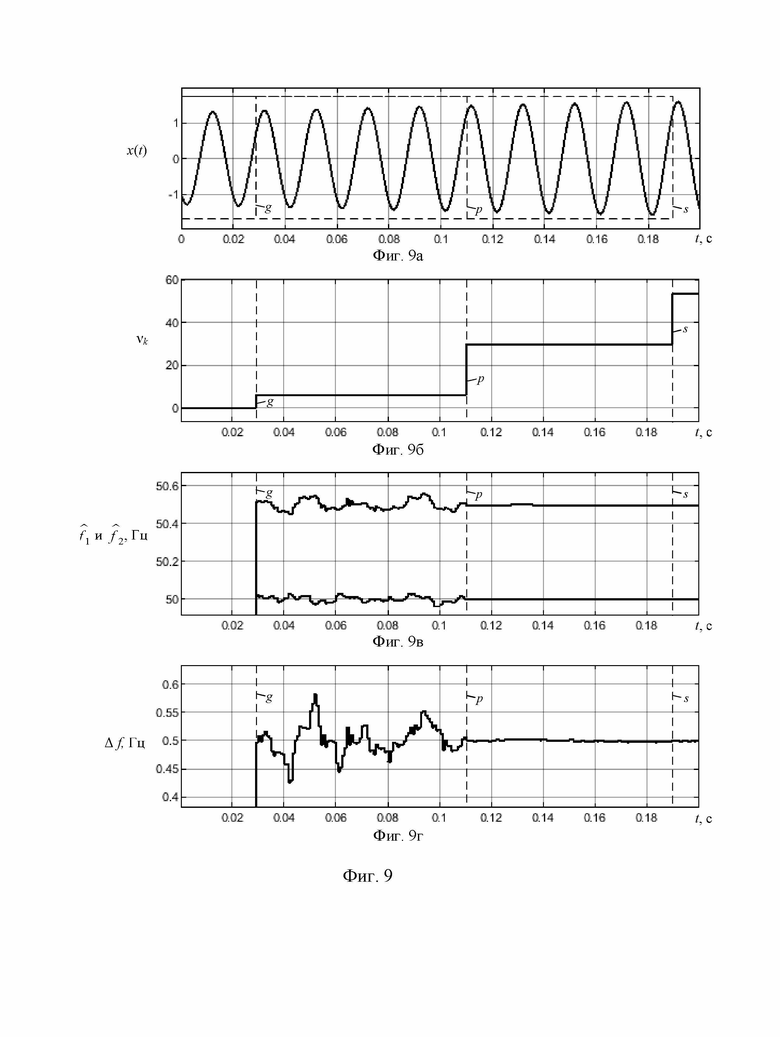
На фиг. 9 изображены осциллограммы: фиг. 9а - сигнал x(t) асинхронного режима с частой скольжения 0,5 Гц, фиг. 9б - сигнал на выходе схемы настройки децимации 6 (шаг внутримодельной децимации νk), фиг. 9в - изменения оценок частот асинхронного режима  и
и  , фиг. 9г - изменение частоты скольжения Δƒ. На осциллограммах показаны окна g, р и s, на границах которых способ меняет шаг децимации νk адаптивного фильтра.
, фиг. 9г - изменение частоты скольжения Δƒ. На осциллограммах показаны окна g, р и s, на границах которых способ меняет шаг децимации νk адаптивного фильтра.
Поясним суть изобретения.
В случае двухчастотного асинхронного режима электрической сети сигнал х(k) содержит две гармонические слагаемые частоты ω1 и ω2:

где k - текущий отсчет, А1, ϕ1 и А2, ϕ2 - амплитуды и начальные фазы гармонических сигналов частот ω1 и ω2 соответственно, Ts - период дискретизации сигнала, w(k) - шум.
Обычно для определения частот используют адаптивный фильтр, настраиваемый на подавление (заграждения) сигнала. Поскольку цифровой сигнал асинхронного режима (2) содержит шум, то настраиваемый на него адаптивный фильтр часть своего ресурса отводит на ослабление шума. Поэтому настроенный на сигнал адаптивный фильтр 1 в своей структуре (фиг. 1) будет содержать - наряду с каскадом последовательно соединенных фильтров гармонических слагаемых 101 и 102 - и фильтр шума 103 [Антонов, В.И. Адаптивный структурный анализ электрических сигналов: теория и ее приложения в интеллектуальной электроэнергетике / В.И. Антонов. - Чебоксары: Чувашский государственный университет имени И.Н. Ульянова, 2018. - 334 с.]. Как известно, фильтр шума улучшает работу канонических фильтров, избирательно усиливая компоненты, распознаваемые ими.
В идеальном случае шум w(k) отсутствует. Тогда каждая слагаемая сигнала теоретически может быть заграждена своим каноническим фильтром
 ,
,
где коэффициент фильтра определяется по формуле
 ,
,
где ωi - угловая частота слагаемой,  - номер слагаемой. Отсюда следует, что сигнал асинхронного режима в идеальном случае может быть полностью подавлен каскадом последовательно соединенных двух канонических фильтров слагаемых частот ω1 и ω2. Как правило, в асинхронном режиме частота одной слагаемой цифрового сигнала (2) близка к номинальной частоте ω0 (согласно ГОСТ Р 59371-2021 устройство автоматики ликвидации асинхронного режима должно выявлять асинхронный режим с частотой скольжения до 5 Гц).
- номер слагаемой. Отсюда следует, что сигнал асинхронного режима в идеальном случае может быть полностью подавлен каскадом последовательно соединенных двух канонических фильтров слагаемых частот ω1 и ω2. Как правило, в асинхронном режиме частота одной слагаемой цифрового сигнала (2) близка к номинальной частоте ω0 (согласно ГОСТ Р 59371-2021 устройство автоматики ликвидации асинхронного режима должно выявлять асинхронный режим с частотой скольжения до 5 Гц).
При отсутствии внутримодельной децимации частоты заграждения канонических фильтров слагаемых на амплитудно-частотной характеристики будут «прижаты» к началу координат (фиг. 2). При этом каждый из канонических фильтров значительно ослабляет другую слагаемую сигнала (это хорошо видно из характеристик, представленных в увеличенном масштабе на вкладке фиг. 2). Другими словами, из-за близкого расположения частот заграждения канонические фильтры слагаемых вступают во внутреннюю конкуренцию, каждый из которых ослабляет чужую слагаемую и ухудшает работу другого фильтра. Именно это обстоятельство ограничивает распознающую способность прототипа.
С целью повышения разрешающей способности способа в предлагаемом изобретении адаптивный фильтр выполняют с внутримодельной децимацией с настраиваемым шагом децимации отсчетов ν в зависимости от частоты скольжения Δω.
Очевидно, что шаг децимации сказывается на вычислении невязки канонического фильтра слагаемой частоты ωi:
 ,
,
где коэффициент фильтра aν определяется по формуле

Внутримодельная децимация искусственно увеличивает период дискретизации сигнала внутри адаптивного фильтра в ν раз, т.е. уменьшает частоту дискретизации цифрового сигнала. С ростом частоты скольжения шаг децимации ν будет уменьшаться.
Повышение разрешающей способности адаптивного фильтра достигается ослаблением внутренней конкуренции канонических фильтров слагаемых. Это обеспечивается разнесением частот заграждения друг от друга на оси нормированных частот ωνTs таким образом, чтобы расстояние между ними обеспечивало хотя бы минимально необходимый заданный уровень hth усиления каноническим фильтром слагаемой одной частоты, например ω1, на частоте другой слагаемой ω2. Наилучшие условия для выполнения этого условия складываются, если частоты заграждения канонических фильтров расположить в средней части оси нормированных частот ωνTs. Поскольку в асинхронном режиме одна из частот слагаемых цифрового сигнала близка к номинальной ω0, то положение частоты среза ω0νTs его канонического фильтра всегда выбирается в центре оси нормированных частот ωνTs (фиг. 3). Иными словами, шаг внутримодельной децимации адаптивного фильтра 1 выбирается из расчета

При этом коэффициент фильтра, как следует из (3),

Как уже отмечалось, величину шага децимации ν выбирают исходя из условия обеспечения значения коэффициента передачи канонического фильтра слагаемой одной частоты на частоте другой слагаемой асинхронного режима выше уставки hth. Это означает, что коэффициенты передачи канонических фильтров должны удовлетворять условиям
и
Из выражения амплитудно-частотной характеристики канонического фильтра с частотой заграждения ωi

следует, что коэффициенты передачи канонических фильтров на чужой частоте заграждения равны (фиг. 4), т.е.

Важно, что для одной и той же частоты скольжения это соотношение выполняется при любых частотах слагаемых асинхронного режима. Значит, правило выбора шага внутримодельной децимации адаптивного фильтра 1 можно сформулировать при номинальной частоте ω0 одного из слагаемых, а затем распространить его и на другие частоты.
Сформулируем это правило. Для канонического фильтра слагаемой номинальной частоты ω0 из выражения (5) при выполнении условия (4) следует, что коэффициент передачи канонического фильтра на частоте чужой слагаемой ω=ω0+Δω равен значению

Следовательно, шаг внутримодельной децимации ν должен удовлетворять условию

Ограничиваясь первым членом разложения в ряд sin(ΔωνTs)≈ΔωνTs, получаем упрощенное условие выбора шага децимации

Одновременно с этим шаг децимации νe должен обеспечивать выполнение условия (4); поэтому он выбирается из ряда оптимальных значений

с учетом условия (6), где n - натуральное число, учитывающее периодичность тригонометрической функции (для интервала дискретизации Ts=1/1200 с ряд νe=6, 30, 54, 78, …).
Минимальный допустимый шаг децимации определяется при n=0:

При этом пороговое значение правой части условия (6) должно быть не ниже минимального значения νmin. Следовательно, величина порога частоты скольжения Δωth должна выбираться из условий (6) и (7) при νe=νmin и Δω=Δωth:
При частоте скольжения Δω>Δωth гарантируется, что коэффициент передачи канонического фильтра на чужой частоте будет выше заданной уставки hth.
Рассмотрим работу предлагаемого способа. При ее изложении будем пользоваться блок-схемой, приведенной на фиг. 5. Техническое совершенство предлагаемого способа достигается в результате выполнения следующих операций:
1. Адаптивный фильтр 1 распознает сигнал асинхронного режима х(k) формируя в своей структуре заграждающие фильтры гармонических слагаемых частот ω1 и ω2 (фиг. 1). Его коэффициенты а=[a0, a1, …, aM] подбираются схемой настройки 107 (фиг. 7) одним из методов оптимизации, например методом наименьших квадратов
 ,
,
где L - количество невязок адаптивного фильтра;
невязка адаптивного фильтра
 ,
,
где νk - величина шага внутримодельной децимации на текущем этапе настройки адаптивного фильтра.
2. В блоке определения частот 3 решают характеристическое уравнение
и определяют оценки частот слагаемых цифрового сигнала, формируя совокупность оценок  . Здесь R - число колебательных составляющих или гармоник.
. Здесь R - число колебательных составляющих или гармоник.
3. Блоком выявления частот асинхронного режима 4 из совокупности оценок частот  отбирают частоты, принадлежащие диапазону заданной величины [ωmin, ωmax] с центром в точке, соответствующей номинальной частоте ω0 (фиг. 6). Для удобства изложения принимаем, что в этот диапазон попадают оценки
отбирают частоты, принадлежащие диапазону заданной величины [ωmin, ωmax] с центром в точке, соответствующей номинальной частоте ω0 (фиг. 6). Для удобства изложения принимаем, что в этот диапазон попадают оценки  и
и  .
.
4. В блоке частоты скольжения 5 определяют оценку частоты скольжения  по формуле (1).
по формуле (1).
5. В схеме настройки шага децимации 6 выбирают шаг децимации для следующего этапа настройки фильтра по величине частоты скольжения (фиг. 8). Если частота скольжения  , то шаг внутримодельной децимации νk+1 равен минимальному допустимому шагу децимации νmin (8), иначе - νe. Шаг децимации νe определяют определителем шага децимации 602 в зависимости от частоты скольжения
, то шаг внутримодельной децимации νk+1 равен минимальному допустимому шагу децимации νmin (8), иначе - νe. Шаг децимации νe определяют определителем шага децимации 602 в зависимости от частоты скольжения  и с учетом условия (6) по выражению (7). Блок задержки 605 обеспечивает доставку сигнала схемы настройки децимации 6 к дополнительному входу 2 адаптивного фильтра 1 на следующем этапе настройки. При этом на начальном этапе настройки адаптивного фильтра выходной сигнал блока задержки 605 соответствует минимальному значению шага децимации ν0 из ряда (7).
и с учетом условия (6) по выражению (7). Блок задержки 605 обеспечивает доставку сигнала схемы настройки децимации 6 к дополнительному входу 2 адаптивного фильтра 1 на следующем этапе настройки. При этом на начальном этапе настройки адаптивного фильтра выходной сигнал блока задержки 605 соответствует минимальному значению шага децимации ν0 из ряда (7).
Проиллюстрируем работу способа в случае асинхронного режима с частотой скольжения 0,5 Гц (фиг. 9) со следующими уставками способа:

В начале своей работы способ принимает размер окна необходимых отсчетов минимальным, в этом случае начальное значение шага децимации ν0=6 задается блоком задержки 605. Этому окну на фиг. 9 соответствует окно g. На границе этого окна способ уже имеет оценки частот асинхронного режима  и
и  и в блоке 5 определяет частоту скольжения Δƒ, а затем на основе формул (6) и (7) в блоке 602 определяет оптимальный шаг децимации. В данном случае он равен 54, т.е. νe=54. Однако условие для работы способа с оптимальным шагом децимации создается лишь в конце окна s, когда окно накапливает достаточное для работы способа число отсчетов входного сигнала х(k). Поэтому способ продолжает работать с начальным шагом децимации νk=6 до наступления границы окна р, когда число отсчетов цифрового сигнала становится достаточным для повышения шага децимации до промежуточного значения из ряда, определенного формулой (7). Как видно из фиг. 9б способ работает в окне от р до s с промежуточным шагом децимации νk=30. При достижении границы окна s количество отсчетов цифрового сигнала становится достаточным для перехода на оптимальный шаг децимации νk=54.
и в блоке 5 определяет частоту скольжения Δƒ, а затем на основе формул (6) и (7) в блоке 602 определяет оптимальный шаг децимации. В данном случае он равен 54, т.е. νe=54. Однако условие для работы способа с оптимальным шагом децимации создается лишь в конце окна s, когда окно накапливает достаточное для работы способа число отсчетов входного сигнала х(k). Поэтому способ продолжает работать с начальным шагом децимации νk=6 до наступления границы окна р, когда число отсчетов цифрового сигнала становится достаточным для повышения шага децимации до промежуточного значения из ряда, определенного формулой (7). Как видно из фиг. 9б способ работает в окне от р до s с промежуточным шагом децимации νk=30. При достижении границы окна s количество отсчетов цифрового сигнала становится достаточным для перехода на оптимальный шаг децимации νk=54.
Предусмотренный в способе механизм изменения шага децимации, согласно которому переключения на расчетный шаг децимации происходит ступенчато, - восходя к расчетному по промежуточным значениям из ряда (7), - позволяет улучшить разрешающую способность способа уже на промежуточных шагах децимации. Это хорошо видно из фиг. 9в; повышение точности оценок частот  и
и  обеспечивается способом уже при промежуточном значении шага децимации νk=30.
обеспечивается способом уже при промежуточном значении шага децимации νk=30.
Таким образом, благодаря изменению шага децимации адаптивного фильтра в зависимости от частоты скольжения асинхронного режима достигается повышение разрешающей способности способа при определении частот слагаемых электрической величины асинхронного режима.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ выделения слагаемых электрической величины по измерениям различных устройств | 2023 |
|
RU2801742C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ГАРМОНИКИ ПЕРИОДИЧЕСКОЙ ЭЛЕКТРИЧЕСКОЙ ВЕЛИЧИНЫ | 2014 |
|
RU2556864C1 |
| Способ разделения слагаемых электрической величины | 2022 |
|
RU2784370C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ ЭЛЕКТРИЧЕСКОЙ СЕТИ | 1993 |
|
RU2107302C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНТЕРВАЛОВ ОДНОРОДНОСТИ ЭЛЕКТРИЧЕСКОЙ ВЕЛИЧИНЫ | 2013 |
|
RU2540267C1 |
| СПОСОБ ВЫДЕЛЕНИЯ АВАРИЙНОЙ СЛАГАЕМОЙ ТОКА КОРОТКОГО ЗАМЫКАНИЯ | 1992 |
|
RU2035815C1 |
| СПОСОБ ВЫДЕЛЕНИЯ СЛАГАЕМОЙ ЭЛЕКТРИЧЕСКОЙ ВЕЛИЧИНЫ | 2013 |
|
RU2536857C1 |
| Способ разделения слагаемых трехфазной электрической величины | 2024 |
|
RU2828446C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ ЭЛЕКТРИЧЕСКОЙ СЕТИ | 1995 |
|
RU2110804C1 |
| Способ определения поврежденных фаз и вида повреждения линии электропередачи | 1992 |
|
SU1820974A3 |
Изобретение относится к электротехнике, а именно к релейной защите и автоматике. Согласно способу электрическую величину преобразуют в цифровой сигнал, настраивают адаптивный фильтр на полное подавление цифрового сигнала, по корням характеристического уравнения фильтра в блоке определения частот определяют оценки частот слагаемых цифрового сигнала. Адаптивный фильтр выполняется с внутримодельной децимацией отсчетов цифрового сигнала с настраиваемым шагом децимации. Для этого в блоке выявления частот асинхронного режима из совокупности оценок частот цифрового сигнала, выделяют оценки частот, принадлежащие диапазону заданной величины с центром в точке, соответствующей номинальной частоте. В блоке частоты скольжения формируют сигнал частоты скольжения, пропорциональный разности этих оценок частот. В схеме настройки децимации контролируют уровень сигнала частоты скольжения компаратором частоты, задается шаг децимации для следующего этапа настройки адаптивного фильтра. При срабатывании компаратора шаг децимации принимается равным заданному значению, а иначе – значению на выходе определителя шага децимации. Технический результат - повышение разрешающей способности способа при определении частот слагаемых электрической величины асинхронного режима. 9 ил.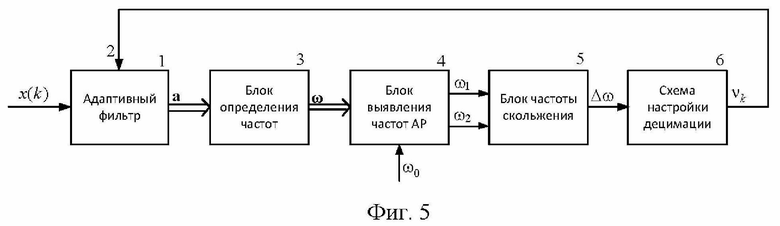
Способ определения частот слагаемых электрической величины асинхронного режима, согласно которому электрическую величину преобразуют в цифровой сигнал путем измерения в равномерно фиксированные моменты времени, настраивают адаптивный фильтр на полное подавление цифрового сигнала и по корням характеристического уравнения фильтра в блоке определения частот определяют оценки частот слагаемых цифрового сигнала, отличающийся тем, что с целью повышения разрешающей способности адаптивный фильтр выполняется с внутримодельной децимацией отсчетов цифрового сигнала с настраиваемым шагом децимации, для этого в блоке выявления частот асинхронного режима из совокупности оценок частот цифрового сигнала, полученных блоком определения частот, выделяют оценки частот, принадлежащие диапазону заданной величины с центром в точке, соответствующей номинальной частоте, и в блоке частоты скольжения формируют сигнал частоты скольжения, пропорциональный разности этих оценок частот, в схеме настройки децимации контролируют уровень сигнала частоты скольжения компаратором частоты, и в зависимости от его состояния блоком выбора децимации задается шаг децимации для следующего этапа настройки адаптивного фильтра, причем при срабатывании компаратора шаг децимации принимается равным заданному значению, а иначе – значению на выходе определителя шага децимации, в котором значение шага децимации определяется исходя из условия обеспечения выше заданной уставки значения коэффициента передачи канонического фильтра гармоники номинальной частоты на частоте, отличающейся от номинальной на частоту скольжения.
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ СОСТАВЛЯЮЩИХ ТОКА КОРОТКОГО ЗАМЫКАНИЯ | 1991 |
|
RU2012086C1 |
| Устройство для цифровой фильтрацииНА OCHOBE диСКРЕТНОгО пРЕОбРАзОВА-Ния фуРьЕ | 1979 |
|
SU840922A1 |
| Многофункциональное устройство для релейной защиты электроустановки | 1989 |
|
SU1705941A1 |
| МНОГОКАНАЛЬНЫЙ ПЕРЕПРОГРАММИРУЕМЫЙ ЦИФРОВОЙ ПРИЕМНЫЙ ТРАКТ | 2004 |
|
RU2289202C2 |
| US 5875348 A1, 23.02.1999. | |||

