Изобретение относится к области радиотехники и может быть использовано для противодействия беспилотным летательным аппаратам, в том числе при разработке средств подавления приемных устройств каналов управления, телеметрии, передачи данных и спутниковой навигации беспилотных летательных аппаратов.
В контексте настоящей заявки будут использованы следующие термины и сокращения:
БПЛА, беспилотник, дрон - беспилотный летательный аппарат,
ЛА - летательный аппарат,
пункт управления БПЛА - место нахождения сил и средств, обеспечивающих выполнение программы полета БПЛА
РЭБ - радиоэлектронная борьба,
целевая зона - область нахождения объектов (целей) подавления в рамках РЭБ.
Известно, что БПЛА широко применяются не только в гражданских целях - например, для контроля дорожной ситуации, в пожарной охране, для аэрофотосъемки. Результаты традиционных наземных наблюдений по многим параметрам уступают данным аэрофотосъемки, полученным с беспилотника: скорость получения, точность, стоимость (URL: https://docs.geoscan.aero/ru/master/database/base-module/sphere/sphere.html (опубл.: 28.08.2020)). Это является дополнительным стимулом для использования БПЛА в военных целях, в частности, для визуального (оптического) наблюдения. Дроны все чаще используют для ведения наблюдения за определенными объектами; они полезны для сбора и передачи информации (чаще всего визуальной) в реальном времени о различных объектах. (URL: https://cyberleninka.ru/article/n/metody-protivodeystviya-razvedke-s-ispolzovaniem-malogabaritnyh-bespilotnyh-letatelnyh-apparatov (дата опубл.: 21.04.2022)).
Известно, что одним из наиболее эффективных и скрытных методов противодействия БПЛА является применение средств радиоэлектронной борьбы с целью перехвата управления БПЛА, постановки помех в работе бортовой электроники и манипулирование протоколами связи БПЛА. Особенность состоит в том, что оператор должен проводить семантический многофакторный анализ условий обстановки и иметь широкий спектр программных инструментов по длительному противоборству БПЛА. Манипулирование протоколами связи БПЛА (спуфинг) представляет собой разновидность РЭБ и подразумевает ряд способов воздействия на систему управления БПЛА. К ним относится получение доступа к управлению за счет взлома шифрованного канала связи или подмены данных авторизации, переполнение интерфейса и канала данных для внедрения в тракт управления стороннего кода. В ряде стран внесение изменений в код управления БПЛА приравнивается к взлому компьютера и наказывается законодательно. Таким образом, бесконтактные методы представляют собой высокотехнологичные комплексы, которые требуют подготовки оператора. Аудио- и лазерные системы не универсальны, поэтому их применение затруднительно. Эксплуатация систем РЭБ подразумевает наличие сложного программно-аппаратного комплекса, что обусловлено высокими затратами. (Скиба В., Кузьмин А. Методы противодействия БПЛА // Арсенал Отечества. - 2021. - №6 (56)).
Актуальной является задача создания способа противодействия беспилотным летательным аппаратам, совершающих передачу информации на наземный пункт приема, который не требует для осуществления специальной подготовки операторов и наличия сложного программно-аппаратного комплекса.
Известен способ противодействия выполнению задач беспилотным летательным аппаратом, включающий выстраивание вдоль границы контролируемой территории линии из множества поднятых в воздух аэростатов, прикрепленных тросами к земной поверхности (пат.RU 2497063, опубл. 27.10.2013. Бюл. №30). По известному решению, под аэростатами закрепляют специальные каркасы, между которыми натягивают проволочные заграждения из тонкой стальной прочной упругой запутанной проволоки, именуемые путанками, занимающими по высоте область порядка 10-20 метров. Тросы аэростатов закрепляют на земле с помощью контейнеров с редукторами, позволяющими по сигналам из пункта обработки информации и управления изменять высоту подъема аэростата путем наматывания-разматывания троса, заблаговременно располагают в подвесных контейнерах аэростатов средства радиолокационного и оптического обзора пространства. Высоту подъема аэростатов устанавливают таким образом, чтобы проволочные заграждения перекрывали высоту полета беспилотного летательного аппарата-нарушителя, с периодичностью порядка суток или по команде оператора системы противодействия выполнению задач беспилотного летательного аппарата опускают аэростаты на землю и проверяют заграждения для изъятия захваченных запутавшихся беспилотных летательных аппаратов-нарушителей.
К недостаткам известного решения относится его низкая эффективность в отношении противодействия разведывательным БПЛА (который снимает и передает информацию на наземный пункт приема): известно, что дрон, летящий на высоте 500 м, имеет радиус видимости около 80 км (URL: https://cyberleninka.ru/article/n/metody-protivodeystviya-razvedke-s-ispolzovaniem-malogabaritnyh-bespilotnyh-letatelnyh-apparatov (дата опубл.: 21.04.2022)). Это означает, что БПЛА не обязательно преодолевать искусственный заградительный барьер, созданный, по известному решению, с использованием аэростатов для того, чтобы выполнить, например, аэрофотосъемку территории, по границе которой этот барьер установлен.
Наиболее близким по совокупности существенных признаков - прототипом заявляемого изобретения - является способ противодействия БПЛА, осуществляемый с помощью комплекса радиоэлектронной борьбы с беспилотными летательными аппаратами и включающий измерение пространственных координат БПЛА и направленное излучение помех в целевой зоне (пат. RU 2685509, опубл. 19.04.2019. Бюл. №11). По известному решению, целевой зоной является область пространства, в которой находится группа (в терминологии авторов известного решения - рой) малогабаритных беспилотных летательных аппаратов, то есть РЭБ ведут непосредственно с БПЛА Формирование пространственных диаграмм излучения помех выполняют в соответствии с размером целевой зоны. Передающая антенна для осуществления известного способа выполнена многолучевой, состоящей из излучающей части и диаграммообразующего устройства с N входами, при этом N=A/Δβ, где А - телесный угол, перекрывающий целевую зону на минимальной дальности радиоэлектронного подавления, Δβ - ширина луча, перекрывающего целевую зон на максимальной дальности радиоэлектронного подавления.
К недостаткам известного решения относится его неэффективность, связанная с существующими рисками несвоевременного обнаружения всех дронов, находящихся в заданном воздушном пространстве, управляемых с общего пункта управления и выполняющих различные маневры в рамках общей боевой задачи. На практике весьма вероятна ситуация, когда над охраняемым объектом будут запущены несколько групп (роев) БПЛА, из которых одна или несколько групп будут выполнять отвлекающий маневр в отношении комплекса РЭБ, а другие беспрепятственно выполнять боевую, в частности, разведывательную задачу. Кроме того, блокирование подвижного средства, такого как БПЛА, достаточно сложная задача, так как необходимо постоянно отслеживать перемещение движущегося БПЛА и направлять антенну, исходя из этого перемещения. При этом при использовании при налете нескольких БПЛА, такая задача усложняется многократно.
Технической задачей, на решение которой направлено предлагаемое изобретение, является создание способа противодействия беспилотным летательным аппаратам, совершающих передачу информации на наземный-пункт приема вне зависимости от того, сколько групп (роев) БПЛА противника находится в воздухе, и какую тактику они используют.
Техническим результатом осуществления предлагаемого изобретения является повышение защищенности охраняемых объектов и/или охраняемых зон от БПЛА, управляемых по радиоканалу.
Достижение заявленного технического результата достигается за счет направленного излучения помех аппаратурой комплекса РЭБ в целевой зоне, которой, в отличие от технического решения, принятого за прототип, является не текущая зона нахождения БПЛА, а возможная зона наземных пунктов управления БПЛА, при этом аппаратный комплекс РЭБ размещен на летательном аппарате легче воздуха на высоте более 1000 метров над уровнем моря.
В отличие от технического решения, принятого за прототип, в предлагаемом техническом решении целевой зоной является не текущая зона нахождения БПЛА, а зона расположения пунктов управления БПЛА.
Размещение аппаратного комплекса РЭБ на высоте от 1000 над уровнем моря позволяет уменьшить зависимость эффективности РЭБ от рельефа местности между аппаратным комплексом РЭБ и пунктом съема информации от БПЛА, кроме того, очевидно, что чем больше высота подъема, тем больше по площади можно обеспечить «пятно блокирования» на земле.
В качестве носителя аппаратного комплекса РЭБ для осуществления предлагаемого изобретения может быть использован любой обитаемый или необитаемый летательный аппарат легче воздуха (далее - летательный аппарат, ЛА).
Аппаратный комплекс РЭБ, необходимый для осуществления предлагаемого изобретения, имеет конструкцию, известную из уровня техники, включает, по меньшей мере, приемную антенну, формирователь помех и передающую антенну и не является предметом охраны по настоящей заявке.
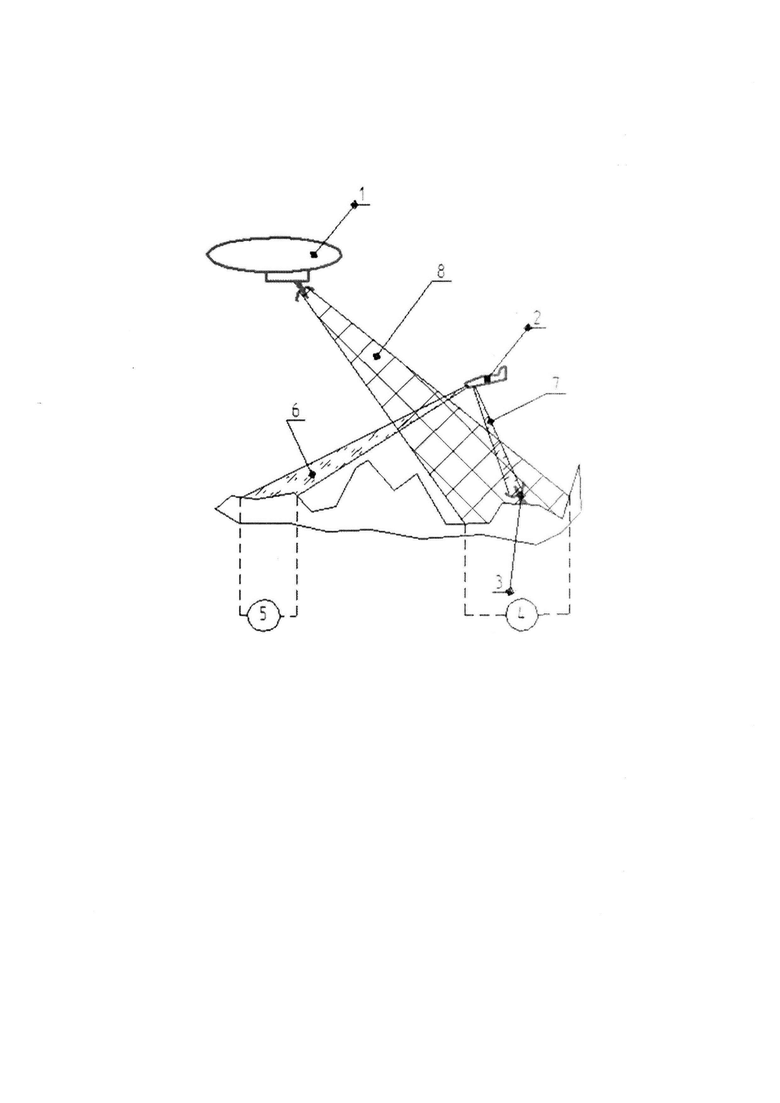
На чертеже условно показана съема осуществления предлагаемого способа. Позициями обозначены:
1 - ЛА,
2 - БПЛА,
3 - пункт управления БПЛА,
4 - целевая зона,
5 - участок охраняемой территория, сканируемый аппаратурой БПЛА в ходе визуальной разведки,
6 - сектор визуального контроля БПЛА
7 - поток информации, передаваемой с борта БПЛА на приемник пункта съема информации от БПЛА,
8 - поток излучения помех аппаратным комплексом РЭБ.
В качестве примера, не исключающего другие варианты носителя аппаратного комплекса РЭБ (на чертеже позицией не выделен), на чертеже показан вариант с установкой аппаратного комплекса на дирижабль. При этом исключительно для упрощения изображения, показан единственный БПЛА однако, надо понимать, что дронов может быть несколько так же, как может быть несколько групп беспилотников. Рельеф местности между пунктом 3 съема информации и участком 5 охраняемой территории показан гипертрофированно гористым для лучшего понимания того обстоятельства, что эффективность предлагаемого способа в значительной мере зависит от месторасположения аппаратного комплекса РЭБ: если бы упомянутый комплекс был бы расположен непосредственно на поверхности участка 5 охраняемой территории, подавление приемников в пункте 3 съема информации БПЛА 2 было бы или невозможным, или, по крайней мере, не столь эффективным.
Предлагаемый способ осуществляется следующим образом в качестве примера.
ЛА 1 с размещенным на нем аппаратным комплексом РЭБ находится на боевом дежурстве в заданном районе.
После получения информации о появлении вблизи зоны ответственности данного ЛА 1 одного или нескольких БПЛА 2, аппаратный комплекс РЭБ ЛА 1 определяет текущие координаты пункта управления (пульта управления) БПЛА 2 и/или координаты пульта управления БПЛА могут быть получены техническими средствами, находящимися на земле и далее переданы на ЛА для доворота антенны и блокирования района управления БПЛА, при этом подобные комплексы могут находиться как на борту ЛА, так и вне его, а информация о местоположении БПЛА передается любым возможным способом на борт ЛА1) и рассчитывает, исходя из них, вероятные координаты пунктов управления 3 БПЛА 2. Границы целевой зоны 4 должны быть расположены так, чтобы вероятные координаты пунктов управления информации 3 БПЛА 2 находились внутри них. Определив месторасположения целевой зоны 4, аппаратный комплекс РЭБ ЛА 1 начинает постановку помех 8 в целевой зоне 4 (для повышения эффективности блокирования, антенна может быть переориентирована/повернута и/или использовано несколько передающих антенн), препятствуя приемом пунктом 3 радиосигналов от БПЛА.
Кроме того, в случае выявления частот управления и ширины полосы канала управления, это информация передается на комплекс РЭБ, расположенной на ЛА. Тогда эффективность применения средств РЭБ на борту ЛА многократно увеличивается, так как блокирование осуществляется не всего диапазона, а лишь конкретного участка диапазона.
В качестве комплекса приема сигнала передачи от БПЛА может использоваться модуль обнаружения сигналов каналов управления и передачи данных БПЛА «Контур 02М»1 (1 https://antidrontech.ru).
- Диапазон раб частот 390 МГц до 5950 МГц
- Автоматический режим поиска и обнаружения радиосигналов
- Идентификация сигналов каналов управления и передачи с БПЛА
- Радиус обнаружения 4000 м
Кроме того, для увеличения эффективности блокирования приемника наземного пункта управления, может использоваться не заградительная помеха, а адаптивная (например, когда для более эффективного блокирования на вход приемника подается практически идентичный сигнал с передатчика БПЛА, немного измененный, например, сдвинутый по фазе и/или амплитуде и/или по времени и др.).
Расчеты автора подтвердили, что эффективное блокирование может быть осуществлено с применением даже одной и/или нескольких узконаправленных антенн. Так из открытых источников известно, что максимальная дальность управления бытовыми БПЛА составляет порядка 5-7 км (при этом у каждой модели своя максимальная дальность, которую можно найти в открытых источниках2 (2 Htpps://profpv.ru/top-10-semochnyh-kvadrokopterov-s-bolshoj-dalnostyu-poleta/), очевидно, что в случае идентификации модели БПЛА нарушителя можно выяснить максимальную зону такой передачи для конкретной модели).
Кроме того, дальность возможного нахождения пункта съема, можно определить исходя из высоты конкретного БПЛА (чем выше высота подъема, тем больше дальность возможного съема).
Таким образом, в случае если неизвестно где точно находится пункт съема информации, необходимо заблокировать зону площадью около 100 квадратных километров.
Расчеты показывают, что при использовании узконаправленной антенны, например DS120000-25 с коэффициентом усиления 25 дБ и диаграммой направленности 9 градусов3, при подъеме на высоту ЛА (например, аэростата) на 7500 км, задачу по эффективному блокированию такой большой площади, можно решить с использованием нескольких подобных антенн.
Для вычисления местоположения пульта управления, могут использоваться различные технические средства, например, пеленгаторы радиосигнала (которые могут находиться как на борту ЛА, так и на земле, очевидно, что чем больше высота подъема такого технического средства, тем на больших расстояниях можно осуществлять такую пеленгацю).
Также локализацию пульта управления можно осуществлять с помощью других технических средств, таких как АЭРОСКОП.
Так, например, комплекс АЭРОСКОП-14 может обнаруживать и локализовывать с точностью до нескольких метров пульт управления БПЛА. Также он имеет след характеристики:
- определение и идентификация БПЛА на расстояниях до 10 км
- позиционирование БПЛА
- позиционирование пилота
- идентификация БПЛА - тревога о вторжении
Данный комплекс может быть установлен как на ЛА, так и на земле и тогда местоположение пульта передается на ЛА, исходя из информации о местоположении, антенна на ЛА доворачивается (вручную или с помощью специального привода) так, чтобы «пятно блокирования» накрыло район местоположения пульта и соответственно, с большой долей вероятности накрыло и место приема информации с БПЛА.
Противодействие беспилотным летательным аппаратам, управляемым по радиоканалу, осуществляют с помощью комплекса радиоэлектронной борьбы и включает локализацию возможного пульта управления беспилотными летательными аппаратами. Целевая зона является зоной расположения пунктов управления беспилотными летательными аппаратами. Постановку помех выполняют с помощью комплекса радиоэлектронной борьбы, размещенного на летательном аппарате легче воздуха на высоте от 1000 м над уровнем моря. Излучение помех осуществляют с помощью направленных антенн в наземную зону нахождения пунктов управления беспилотными летательными аппаратами. Обеспечивается повышение защищенности охраняемых объектов и/или охраняемых зон от БПЛА, управляемых по радиоканалу. 4 з.п. ф-лы, 1 ил.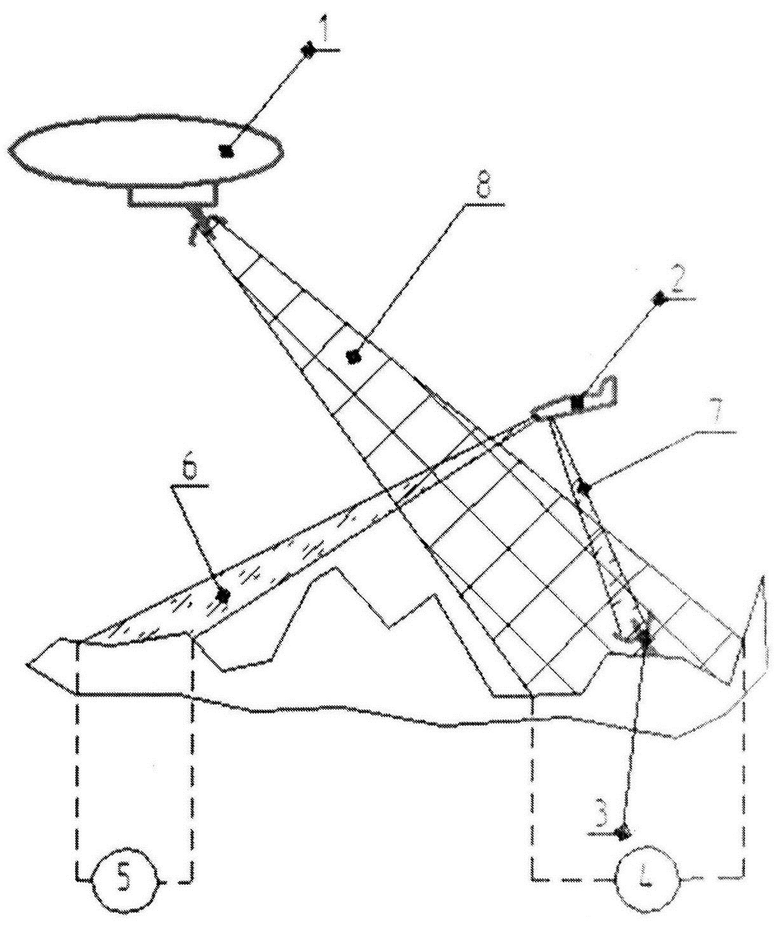
1. Способ противодействия беспилотным летательным аппаратам, управляемым по радиоканалу, осуществляемый с помощью комплекса радиоэлектронной борьбы и включающий локализацию возможного пульта управления беспилотными летательными аппаратами, отличающийся тем, что целевая зона является зоной расположения пунктов управления беспилотными летательными аппаратами, а постановку помех выполняют с помощью комплекса радиоэлектронной борьбы, размещенного на летательном аппарате легче воздуха на высоте от 1000 м над уровнем моря, при этом излучение помех осуществляют с помощью направленных антенн в наземную зону нахождения пунктов управления беспилотными летательными аппаратами.
2. Способ по п. 1, отличающийся тем, что местоположение пункта управления беспилотными летательными аппаратами определяется с помощью дополнительных технических средств на летательном аппарате и/или на земле, далее это местоположение блокируется с помощью комплекса радиоэлектронной борьбы, находящегося на борту летательного аппарата.
3. Способ по п. 1, отличающийся тем, что местоположение пульта управления БПЛА вычисляют с помощью наземных комплексов определения местоположения пульта управления.
4. Способ по п. 1, отличающийся тем, что излучаемая помеха носит адаптивный характер.
5. Способ по п. 1, отличающийся тем, что с помощью наземных приемных устройств и/или приемных устройств, находящихся на борту летательного аппарата, вычисляют частоты и ширину канала управления беспилотными летательными аппаратами и далее производят блокирования выявленных частот и ширины канала с помощью комплекса радиоэлектронной борьбы, находящегося на борту летательного аппарата.
| US 20200062392 A1, 27.02.2020 | |||
| МАКАРЕНКО С.И | |||
| Противодействие беспилотным летательным аппаратам | |||
| Монография | |||
| - СПб.: Наукоемкие технологии, 2020, страницы 116-118, 126-134 | |||
| US 2021033715 A1, 04.02.2021 | |||
| Разработка Ростеха позволит определять местонахождения пункта управления дронами | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
