Изобретение относится к радиопеленгации и может быть использовано, в том числе, для выявление беспилотных летательных аппаратов (БПЛА) в автоматическом режиме с небольшой вероятностью допущения ошибок.
Известен способ поиска, обнаружения и автоматического сопровождения воздушных объектов, который предполагает использование оптического кругового локатора, включающего, в свою очередь, сканирующее устройство в виде полого цилиндра, являющегося ротором электродвигателя, с отверстиями на обоих торцах и оптическим люком на образующей этого цилиндра, оптические элементы, которые встроены внутри цилиндра: канал для приема излучения от объекта, имеющего температурный контраст, канал телевизионный ночного видения, приемопередающий канал, для замера дальности и распознавания объекта с помощью подсветки наблюдаемого объекта (пат. RU 2352957, опубл. 20.04.2009. Бюл. №11).
К недостаткам известного решения относится высокая сложность используемого устройства и потенциальные риски, связанные с его использованием в полевых условиях персоналом, не имеющим высокого уровня специальной подготовки. Наличие высокоточных опто-механических элементов -зеркал, частей передачи к ним движения и т.д. - требует специальных условий транспортировки и эксплуатации. Кроме того, в некоторых условиях, вероятных на практике, например, в условиях плотной облачности эффективность известного решения может быть снижена.
Известен способ автоматизированного определения координат беспилотных летательных аппаратов, включающий использование приемных устройств для наблюдения в определенном диапазоне электромагнитных волн, причем приемные устройства расположены заданным образом (пат. RU 2523446, опубл. 20.07.2014. Бюл. №20). По известному решению, в качестве приемных устройств используются камеры кругового обзора, заданное расположение состоит в симметричном размещении упомянутых камер и их направлении в разные стороны, заданный диапазон электромагнитных волн представляет собой оптический диапазон. Кроме того, известный способ включает использование лазерной подсветки пеленгуемого объекта.
К недостаткам известного решения относится ограниченность его применения в некоторых опасных метеорологических условиях, например, при плохой видимости, низкой облачности, ливневых осадках, больших отложениях изморози на объективах видеокамер. Кроме того, насколько можно судить из иллюстрации к известному решению, оно фактически, основано на применении однопозиционной системы (фиг. 1 к описанию известного решения): приемные устройства изображены на общей платформе. В тоже время известно, что «однопозиционные радионавигационные системы имеют также существенный недостаток - у них низкая точность пеленгования. Это происходит из-за низкой точности определения координат цели в поперечном направлении. Одним из наиболее эффективных способов избежания этого недостатка является использование многопозиционной системы пеленгования» (Воробьева Д.Н., Морозов О.А. Исследование алгоритма местоопределения источника радиоизлучения много позиционной пассивной системой пеленгования. [Электронный ресурс]. URL: http://smu.unn.ru/files/n2/pS9-62.pdf (дата обращения: 12.11.2021)).
Наиболее близким по совокупности существенных признаков - прототипом заявляемого изобретения - является способ обнаружения и нейтрализации БПЛА, включающий прием, запись и анализ радиосигналов в заданных частотных диапазонах ([Электронный ресурс]. URL: https://antidron.pro/katalog/sfericheskaja-zashhita-ot-bespilotnikov-kupol/strizh (дата обращения: 12.11.2021)). Известное решение предполагает использование так называемого антидронового комплекса типа «Стриж», который может быть размещен на мачте или крыше высотного здания.
К недостаткам известного решения относится возможность неточной идентификации сигнала от БПЛА из-за того, что данное техническое средство не сможет «различать» сигналы, пришедшие «сверху» и с земли, либо такое Соответственно, блокирование осуществляется всех радиосигналов в заданном диапазоне, в независимости излучаются ли они источниками с земли или «сверху». Также данный радиосигнал может быть не только с борта БПЛА, но и с борта ЛА на больших высотах (например, ИСЗ). Очевидно, что такая система блокирования не рациональна, так как часть ресурса излучающей мощности блокиратора тратится на блокирование частот, излучаемых с земли или с очень высотных объектов (например, ИСЗ).
Технической задачей, на решение которой направлено предлагаемое изобретение, является устранение недостатков прототипа: снижение зависимости эффективности способа обнаружения летательных аппаратов от метеорологических условий при одновременном повышении точности обнаружения и более эффективного способа блокирования (блокироваться будут только частоты воздушного объекта, находящемся на определенном эшелоне высот), а также с достаточно большой вероятностью отличие источника наземного радиоизлучения от источника радиоизлучения, находящемся на определенной высоте (диапазоне высот, эшелоне), кроме того будет достигнута большая вероятность по отличию источника радиоизлучения на заданной высоте (эшелоне, диапазоне высот) от более высотного источника радиоизлучения.
Поставленная техническая задача решается за счет использование системы обработки полученных данных (далее - СОПД), которая сравнивает как минимум два выявленных сигнала на одной частоте (в одно и тоже время) в диапазоне, в котором наиболее вероятно работа излучающих устройств с борта беспилотного летательного аппарата (далее - БПЛА), при этом один из радиосигналов получается от приемника, который находится на земной поверхности в локальном районе, второй же радиосигнал получается от приемника, который установлен на воздушном объекте, который находится на определенной высоте над локальным районом, при превышении уровня радиосигнала, выявленным приемником, находящемся на воздушном объекте над уровнем радиосигнала, выявленным на земной поверхности, делается вывод о том, что выявленный радиосигнал излучается с борта БПЛА.
При этом возможны варианты реализации, когда выбранные алгоритмом как частоты, излучаемые «сверху» сразу же блокируются по средством блокиратора, установленного также на воздушном объекте. Очевидно, что для этого необходимо установка блокиратора частот на воздушном объекте.
Также предпочтительнее, чтобы воздушный объект с приемной антенной был расположен вертикально над наземной приемной антенной, расположенной в локальном районе (на одной линии два приемника). При несоблюдении этого условия (если угол между воображаемой линией, которая соединяет два приемника и горизонтальной поверхностью не будет равняться 90 градусов), существует некая (небольшая) вероятность, что уровень радиосигнала от БПЛА будет больше на приемнике, расположенном на земной поверхности, чем на воздушном объекте (исходя из области знания геометрии).
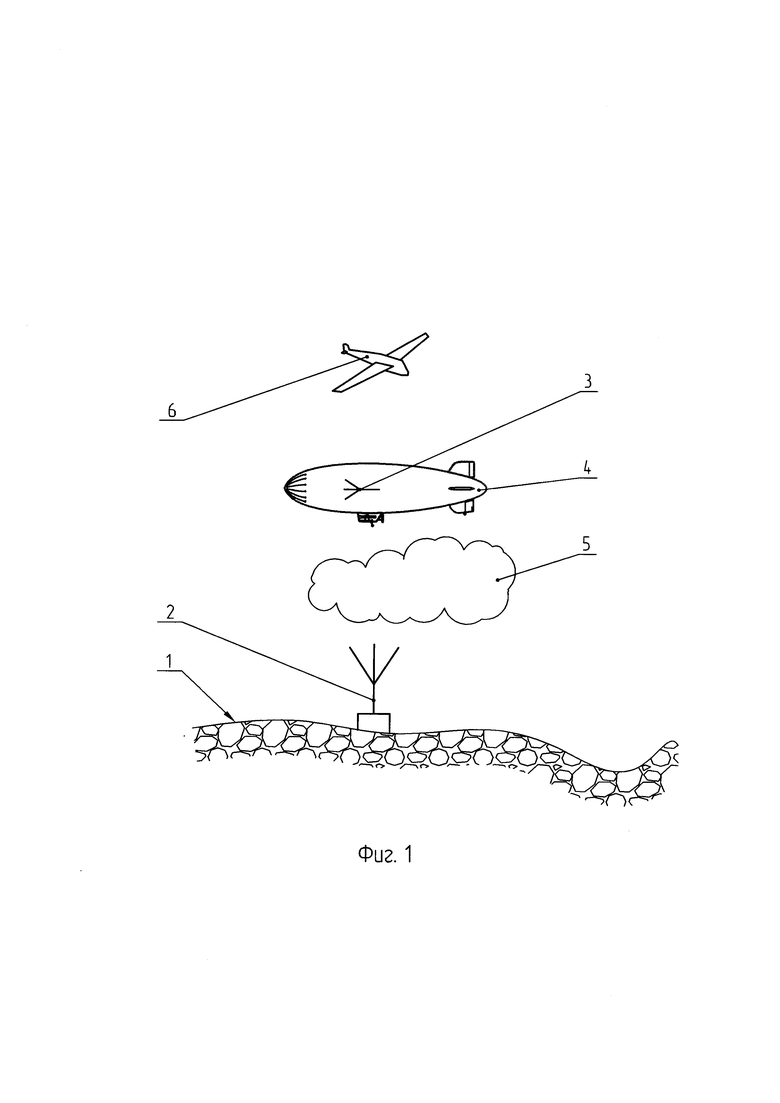
Предлагаемый в качестве настоящего изобретения способ поясняется чертежом (фиг. 1). На земной поверхности 1 размещено первое приемное устройство 2. Второе приемное устройство размещено на воздушном объекте. На фиг. 1 в качестве примера, не исключающего другие варианты осуществления предлагаемого способа, показано размещение второго приемного устройства на борту аэростата 4. Пред почтительнее, чтобы высота, на которой должно быть размещено второе приемное устройство 3 над поверхностью земли составляет не менее 50 м, 5 - облака, 6 - выявляемый БПЛА.
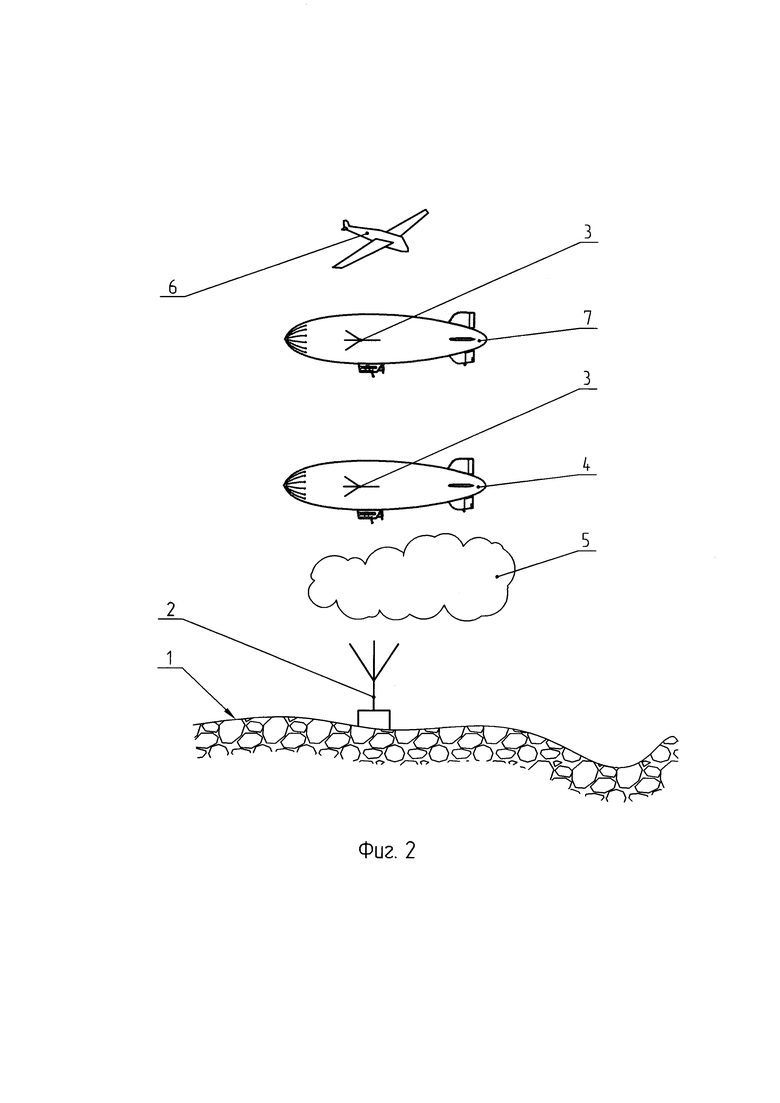
Приемные устройства могут быть размещенными на нескольких воздушных объектах, поднятых на разные высоты (эшелоны) над земной поверхностью 1. Так, на пример, на фиг. 2 представлены 2 воздушных объекта, на которых размещены 2 приемника (на фиг.2 обозначены 4 и 7 воздушные объекты, на которых размещены приемники, 6 - БПЛА, 5 - облака, 1 - земная поверхность, 2 - наземный приемник).
Выбранная схема размещения (воображаемая линия, проходящая через приемники на воздушных объектах и на земле, перпендикулярна земной поверхности).
При использовании нескольких приемников, находящихся на разных высотах и/или под разными углами между воображаемой линией, которая соединяет два приемника и горизонтальной поверхностью, можно уменьшить вероятность ошибки выявления радиосигнала не с БПЛА, а с земной поверхности, кроме того, зная местоположение приемников и уровень прихода сигнала, можно с помощью различных методов, рассчитать примерное местоположение БПЛА по его приходу радиосигнала. Например, использовать, подобие триангуляции.
Сигнал с частотной модуляцией, в рамках необходимой точности можно считать его мощность не изменяющейся со временем. Мощность сигнала принимаю обратно пропорциональной квадрату расстояния от источника, поглощением среды и преградами пренебрегаем. Любые угломерные и фазовые методы отпадают, т.к. невозможно определить направление на источник. Антенна как у источника, так и у приемника всенаправленная. Разностно-дальномерный метод использовать невозможно, т.к. замеры делались одним приемником в разное время (в пределах часа).
Остается только некоторое подобие триангуляции. Фактически единственная имеющаяся информация - это мощность сигнала. В сети была обнаружена следующая идея: строятся окружности с центрами в точках, где был приемник, радиусом обратно пропорциональным квадрату мощности. Место пересечения этих окружностей будет районом нахождения источника сигнала. (https://fortim.cxem.net/index.php7/topic/153501-%Р0%ВЕ%Р0%ВЕ%Р1%80%Р0%В5%Р0%В4%Р0%В5%1^УоВВ%Р0%В5%Р0%В1ЖР0%В8%Р0%В5-%Р0%ВА %Р0%ВЕ%Р0%ВЕ%Р1%80%Р0%В4%Р0%В8%Р0%ВР%Р0%В0%Р 1%82-%Р0%В8%Р1%81%Р1%82%Р0%ВЕ%Р1%87%Р0%ВР%Р0%В8%Р0%ВА%Р0%В0-%Р1%80%Р0%В0%Р0%В4%Р0%В8%Р0%ВЕ%Р1%81%Р0%В8%Р0%ВЗ%Р0%ВР%Р0%В0% Р0%ВВ%Р0%В0-%Р0%ВЖР0%ВЕ-%Р0%ВС%Р0%ВЕ%Р1%89%Р0%ВР%Р0%ВЕ%Р1%81%Р1%82%Р0%В8/)
При использовании направленных антенн или антенн, специально предназначенных для радиопеленгации (такие антенны можно использовать как для приемника, расположенного на земной поверхности так и на приемнике (ах), расположенных на воздушном объекте (объектах)), точность таких расчетов увеличится. При этом очевидно, что антенны должны быть направлены вверх.
Например, подойдут пеленгационные антенны, использующие фазовый метод. Существуют разные подмножества фазовых методов, рассмотрим для примера принцип квази-допплеровского пеленгатора. Представим сигнал, идущий с определенного направления, и антенну, вращающуюся в горизонтальной плоскости.
Очевидно, что благодаря эффекту Допплера, во время движения антенны в сторону источника, частота будет выше, в обратную сторону, соответственно ниже. Анализируя максимум и минимум колебаний частоты, можно легко определить направление. Разумеется, в реале антенну никто не вращает - используется стационарная решетка из антенн (примерно как на фото), переключение сигнала с которых выполняется электронной коммутацией. Сравнивая фазы сигналов, можно определить направление на источник излучения.
Впрочем, вернемся к пеленгаторам стационарным. Наверное основной вопрос, который интересует пользователей - это точность и частотный диапазон пеленгации. Для примера можно рассмотреть Стационарный пеленгатор «АРК-СП», описание которого есть на сайте bnti.ru:
- Рабочий диапазон частот: 20-3000 МГц
- Чувствительность по полю в диапазоне 20-1000 МГц: не более 12 мкВ/м
- Инструментальная точность (СКО), не более: 2° (20-1000 МГц)
- Минимальная длительность пеленгуемого сигнала, однократного при полосе обработки 5 МГц: 30 мс
- Непрерывная запись радиосигналов в полосе: до 24 МГц, скорость потока данных при непрерывной записи радиосигнала в полосе 24 МГц: 102,4 МБайт/с
Из этого описания можно выделить ряд полезных фактов:
- Рабочий диапазон частот простирается до 3ГГц, что покрывает все практически возможные источники сигналов.
- Для пеленга действительно достаточно очень короткого сигнала.
- Максимальная полоса записываемого сигнала 24МГц, это связано с максимальной частотой дискретизации доступных АЦП. Описание на сайте датируется 2012 м годом, учитывая некий прогресс, можно предположить что сейчас доступны АЦП на 60 или даже на 100МГц. Но больше вряд ли, и однозначно можно сказать, что весь радиоэфир никто не пишет, это слишком сложно и дорого. Таким образом, пеленгация сигнала «задним числом» по записи практически невозможна, разве что сигнал попал в запись случайно.
- Заявленная точность не более 2°, что с одной стороны, весьма неплохо, с другой стороны, явно недостаточно для поиска с точностью «до квартиры». Более того, как следует из принципа действия, в вертикальной плоскости сигнал не пеленгуется вообще, так что узнать высоту источника (или этаж) тоже невозможно, (https./fhabr. com/ru/post/397175/)
Воздушными устройствами, на которых может быть размещено второе приемное устройство, могут быть БПЛА, дирижабль или иной воздушный объект.
Отлично подойдет дирижабль МД-900 (https://www.cnews.m/articles/letayushchie_tankery_i_vozdushnye_aviano Данное техническое средство имеет следующие характеристики.
Масса полезной нагрузки 3170 кг
Максимальная масса специализированного модуля 2500 кг
Максимальный допустимый взлетный вес 8630 кг
Объем оболочки 9050 м3
Диаметр оболочки 17,1 м
Длина оболочки 60 м
Площадь оперения 130 м2
Масса конструкции дирижабля 4680 кг
Минимальная скорость управления 0 км/ч
Крейсерская скорость 100 км/ч
Максимальная скорость 130 км/ч
Время кругового разворота в режиме зависания не более 100 с
Мощность маршевого турбо-дизеля 2x3 75 л.с.
Мощность рулевого двигателя 50 л.с.
Продолжительность полета при максимальной скорости 20 ч
Продолжительность полета при крейсерской скорости 50 ч
Дальность полета с крейсерской скоростью 3000 км
Перегоночная дальность полета 4250 км
Практический потолок 2000 м
Рабочая высота полета 1000 м
При этом приемную антенну (и/или пеленгационную) желательно разместить сверху (например, на оболочку).
Желательно, чтобы выявляемый БПЛА оказался над воздушным объектом (для того, чтобы уровень сигнала от БПЛА всегда был выше приемной антенной, установленной на воздушном объекте, если же БПЛА окажется между наземной антенной и антенной на воздушном объекте, то существует вероятность того, что сигнал, фиксируемый наземной антенной будет больше, а, следовательно, система, обрабатывающая полученные от антенн данных, может сделать вывод, что источник радиосигнала находится на земной поверхности).
Учитывая, что все профессиональные БПЛА (и большинство бытовых) производят полеты на высоте от 150 м до 6000 м (https://mssiandrone.ru/news/kak_vysoko_mozhet_letat_dron/), то предпочтительнее, чтобы воздушный объект находился на высоте не выше 150 м!
При этом, чем меньше высота воздушного объекта, тем более одинаковые значения будут фиксироваться приемниками с земли и на воздушном объекте. Практические испытания показывают, что желательно, чтобы высота воздушного объекта была не менее 50 метров.
Также необходимо, чтобы и приемники и их антенны, находящиеся на воздушном объекте и на земле, показывали одинаковый уровень сигнала на одинаковом расстоянии в заданном диапазоне частот (чувствительность антенн и приемников были примерно одинаковы). Предварительно желательно произвести настройку приемников в диапазоне где наиболее вероятно выявление радиосигналов от БПЛА (в случае, если у выявится некая погрешность), необходимо ее учесть при принятии решения СОПД (инструментальная погрешность). Также очевидно, что СОПД должна получать данные от наземного и приемника (ов), расположенного на воздушном объекте. Такое получение данных может быть получено за счет соединения СОПД с приемниками с помощью проводных или беспроводных технологий. В качестве СОПДа можно использовать ПЭВМ.
Предлагаемый способ обнаружения летательных аппаратов осуществляется следующим образом.
БПЛА 6, появление которого в заданном районе необходимо обнаружить, может появиться в этом районе в разных метеорологических условиях, например, при наличии облаков 5. Облачность может быть настолько плотной, что обнаружение БПЛА 6 с помощью оптических средств окажется невозможным. При этом на земной поверхности 1 в зоне наблюдения могут одновременно находиться многочисленные источники радиоволн (на фиг. 1 не показаны), которые будут вносить погрешность при использовании низко расположенных пеленгаторных устройств, подобных применяемым, например, в известном решении, принятом за прототип. Если заранее известна наиболее вероятная высота полета БПЛА, который нужно обнаружить, второе приемное устройство (расположено на воздушном объекте) поднимают на расстояние от земной поверхности 1, превышающее ожидаемую высоту полета БПЛА на 50-100 м.
БПЛА содержит источник радиоволн, поскольку обменивается сигналами с пунктом управления полетом, а также возможно, что БПЛА может иметь функцию сброса зафиксированных данных наземному объекту данных (фото, видео), которое также будут сбрасываться по средством радиоканала. Первое и второе приемные устройства фиксируют источник радиоволн. СОПД (на фиг. 1 не показан) сравнивает уровень получаемых сигналов в заданном диапазоне (где наиболее вероятна работа сигналов от БПЛА). В том случае, если сигнал, зафиксированный вторым приемным (расположен на воздушном объекте), оказывается более мощным, чем на первом приемном устройстве 2 принимается решение об обнаружении БПЛА 6.
При наличии аппаратуры по блокированию на борту воздушного объекта и/или на земле, производится блокирование выявленных частот (сверху).
Наличие второго приемного устройства позволяет повысить точность обнаружения за счет исключения сигналов от наземных радиотехнических устройств.
В качестве блокиратора может быть использован тех комплекс «Штора-2», предназначенный для блокирование БПЛА (http://kobra.su/catalog/statcionarnye/item/shtora-2/)
Обеспечивает эффективное блокирование частот, используемых для организации каналов управления летательными аппаратами, а также блокирование работы устройств, использующих спутниковые навигационные системы.
Наличие направленных антенн обеспечивает увеличение дистанции действия изделия.
Конструктив изделия позволяет производить быструю замену уже имеющихся модулей подавления, что позволяет облегчить использование, модернизацию и обслуживание изделия.
В изделии реализована возможность доукомплектования его модулями подавления различных диапазонов частот отличных от поставляемых в комлекте с комплексом по индивидуальному заказу не прибегая к доработке изделия.
Наличие возможности подключения внешней аккумуляторной батареи позволяет обеспечить бесперебойную работу изделия при потере питания от внешнего источника.
Наличие пульта дистанционного управления.
Питание
Питание осуществляется от внешней сети переменного тока с напряжением 220 В или от Кейса-АКБ.
Комплектация
В комплект изделия входят передатчик, комплект антенн, пульт дистанционного управления, Кейс-АКБ (по требованию заказчика), эксплуатационная документация. * Суммарные выходные мощности и потребляемые мощности изделия приведены при комплектации передатчика устройствами формирования сигналов с рабочими частотами указанными выше. При комплектации передатчика другими устройствами формирования сигналов по требованиям заказчика значения выходных и потребляемых мощностей изделия рассчитываются как сумма значений выходных мощностей и потребляемых мощностей соответственно применяемых устройств формирования сигналов. Диапазон подавляемых частот 400-470МГц
860-930 МГц
2400-2483,5 МГц
5150-5945 МГц
1176-1228 МГц
1242-1279 МГц
1575,32-1575,52МГц
1598-1606 МГц
Время работы от Кейса-АКБ не менее 1 часа
от сети 220 В не менее 8 часов
Выходная мощность не менее 160 Вт
Напряжение питания 220 (+22; -33) В
Потребляемая мощность не более 1200 Вт
Документы для скачивания
Презентация ШТОРА-2
В качестве приемников может использоваться, например, AOR AR-6000 Широкополосный сканирующий приемник (https://alpha-com.ru/product/aor_ar6000/)
OR AR-6000D Ультра-широкополосный сканирующий приемник
Приемник AR6000 был представлен компанией AOR своим придирчивым потребителям в июле 2013 года, ключевыми отличиями нового приемника от модели AR5001D стали крайне высокая верхняя граница рабочего диапазона и расширенная функциональность приемника вобравшая в себя весь арсенал разработок компании в области приема сигналов свыше 2.4 ГГц в новых стандартах MLS, STL и FPU. Ранее прием этих новых сигналов используемых в сетях ISM, WiMAX и так называемых С и S-диапазонах был недоступен с широкополосных сканирующих приемников, не смотря на то, что сегодня во всем мире полосы частот свыше 2.5 ГГц используются для новых цифровых сетей связи, таких как LTE-Advanced, TD-SCDMA и WCDMA/HSPA.
На всех частотах AOR AR6000 обеспечивает отличные характеристики приема и может быть использован для анализа сигналов и последующей оценки его характеристик. Обратите внимание, что AR6000 не декодирует и не расшифровывает эти сигналы, основным назначением приемника является аппаратное обнаружение, захват и вывода данных о принятых сигналах (IF & I/Q) для их дальнейшей обработки и анализа.
Краткие технические характеристики приемника AOR AR6000:
Диапазон частот на прием: 9 кГц-6000 МГц
Скорость сканирования, каналов / сек: ~100
Виды модуляции: NFM WFMAM USB LSB CWSFMNAM WAMAPCO Р25 опционально
Шаг подстройки частоты: от 1 Гц в диапазоне до 3.15 ГГц, 2 Гц выше 3.15 ГГц
Антенные разъемы на приемнике: 2 х N-type-мама, 25 МГц-6 ГГц, 9 кГц-3.15 ГГц
Диапазон рабочих температур, °С: -0…+50
Комплект поставки стационарного сканирующего приемника AOR 6000:
Приемник AOR AR6000
АА8600 Малошумящий сетевой адаптер, 220 В
Карта памяти SD на 2 GB
Перечень команд управления приемником
Инструкция по эксплуатации
Антенны для профессионального сканирующего приемника AOR AR-6000:
SA7000 Широкополосная антенная система, 30 кГц-2 ГГц (оптимальный выбор)
DA753G Компактная широкополосная дискоконусная антенна, 75 МГц-3 ГГц
DA5000 Компактная широкополосная дискоконусная антенна, 30 МГц-2 ГГц, до 2.5 дБ
LA400 Активная широкополосная антенна, петлевой вибратор, 10 кГц-500 МГц, 20 дБ
LA800 Внешняя активная широкополосная антенна, петлевой вибратор, 10 кГц-500 МГц, 20 дБ
МА500 Широкополосная автомобильная антенна с магнитным основанием, 25-1300 МГц, 2.5 д
Техническим результатом осуществления предлагаемого способа обнаружения летательных аппаратов на заданных эшелонах (диапазонов высот) является повышение точности обнаружения в любых метеорологических условиях.
Также с помощью предложенного способа будет решаться задача (дополнительный технический результат) по отличию сигнала от объектов на больших высотах (например, ближнего космоса от 100 км и выше - ИСЗ) от объектах, находящихся ниже определенных значений высот (выявление источника радиоизлучения на борту Л А на определенных эшелонах). Так, учитывая примерно одинаковый диапазон частот БПЛА и ИСЗ автору представляется значимой задача по различию радиосигнала «сверху» от ИСЗ и от БПЛА. Ведь если не различать данные сигналы, будет повышена вероятность «ложных срабатываний» всей системы (с учетом большого распространения спутников).
Предлагается соответствующая настройка СОПД. Очевидно, что разница ослабевающего сигнала на приемниках расположенных на высоте 100-200 метров друг от друга на небольшой высоте (от нескольких сотен метров до 5-6 километров соответствует БПЛА) и разница ослабевающего сигнала на высоте от 1000 км и выше, будет существенна.
Для доказательства данного утверждения используем формулу, рекомендованную Международным союзом электросвязи ITU-R Р. 525-2. (http s: //r1ban.ru/calc/loss-calc.htm)
Ассамблея радиосвязи МСЭ, учитывая,
а) что распространение радиоволн в свободном пространстве является эталонным понятием в радиотехнике, рекомендует,
1. чтобы для расчета ослабления в свободном пространстве использовались методы, изложенные в приложении 1.
Приложение 1
<…>
2.2 Линии связи пункта с пунктом
Для линии связи пункта с пунктом ослабление в свободном пространстве между изотропными антеннами, называемое также основными потерями передачи в свободном пространстве (обозначения: Lbf или А0), целесообразно рассчитывать следующим образом:
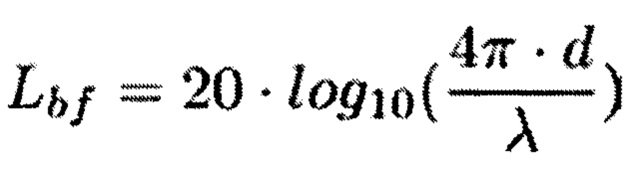
Уравнение также можно записать, используя вместо длины волны частоту:
Lbf=32,4+201g(f)+201g(d)
Найдем разницу ослабленного сигнала между приемниками один из которых находится на земле, а второй на высоте 200 метров. При этом предположим, что БПЛА будет находиться на высоте километра. Используя формулу выясним, что ослабевание сигнала на частоте 900 МГц (часто используется в БПЛА - https://www.podavitel.ru/na-kakikh-chastotakh-rabotayut-kvadrokoptery-i-drony.html) на наземном приемнике составит 91,48 Дб. Ослабевание, которое зафиксирует приемник на воздушном объекте, находящемся на высоте 200 метров от земли (800 метров от БПЛА) составит 89,55 дБ. Таким образом радиосигнал, зафиксированный наземным приемником будет более чем на 2% ослаблен, чем радиосигнал, зафиксированный воздушным объектом (что непременно будет выражено в уровне выявляемого сигнала).
Если же посчитать разницу между ослабленным сигналом на наземном приемнике и на воздушном объекте, сохраняя все условия, поставленные выше, но заменив высоту прихода сигнала с 1 км на 1000 км (предполагая, что ИСЗ находится примерно на такой высоте), посчитаем, что разница между сигналами на наземном приемнике и на приемнике, размещенном на воздушном объекте на высоте 200 м, практически будет отсутствовать (не превышать 0,05%).
Учитывая вышесказанное СОПД можно настроить таким образом (предпочтительнее с использованием искусственного интеллекта и самообучающихся систем), что, анализируя разницу уровней сигналов между наземным приемником и приемником, находящемся на воздушном объекте (чем больше будет приемников на воздушных объектов, тем предпочтительнее), СОПД будет делать вывод не только о нахождении источника радиоизлучения на земле или в воздухе, но в случае нахождения источника радиоизлучения в воздухе, сможет сделать вывод на какой примерно высоте находится данный источник.
Изобретение относится к радиопеленгации и может быть использовано, в том числе, для выявления беспилотных летательных аппаратов (БПЛА) в автоматическом режиме. Техническим результатом является повышение точности обнаружения летательных аппаратов на заданных эшелонах (диапазонах высот) в любых метеорологических условиях. Заявленный способ включает сравнение как минимум двух выявленных сигналов на одной частоте в диапазоне, в котором наиболее вероятна работа излучающих устройств с БПЛА. При этом один из радиосигналов получают от приемника, находящегося на земной поверхности в локальном районе, второй – от приемника, установленного на воздушном объекте, который находится на высоте не менее 50 м над локальным районом. При превышении уровня радиосигнала, выявленного приемником на воздушном объекте, над уровнем радиосигнала, выявленным на земной поверхности, делается вывод о том, что радиосигнал излучается с борта БПЛА. 5 з.п. ф-лы, 2 ил.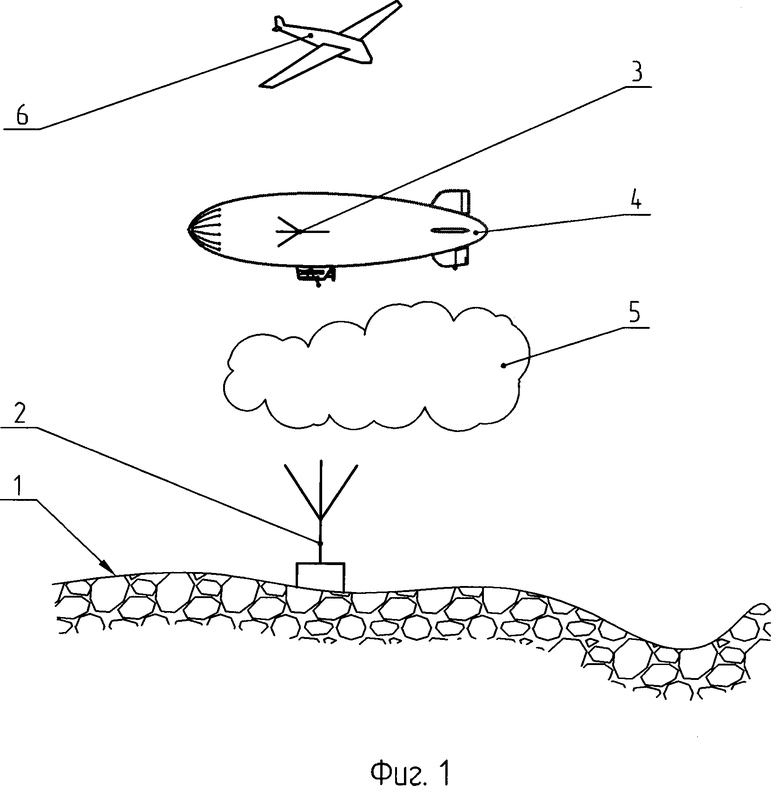
1. Способ обнаружения летательных аппаратов в локальном районе, включающий использование системы обработки полученных данных, посредством которой сравнивают два выявленных сигнала на одной частоте в диапазоне, в котором наиболее вероятна работа излучающих устройств с борта беспилотного летательного аппарата (БПЛА), при этом один из радиосигналов получают от приемного устройства, находящегося на земной поверхности в локальном районе, второй радиосигнал получают от приемного устройства, установленного на воздушном объекте, находящемся на высоте не менее 50 м над локальным районом, при превышении уровня радиосигнала, выявленного приемным устройством, находящимся на воздушном объекте, над уровнем радиосигнала, выявленного на земной поверхности, делают вывод о том, что выявленный радиосигнал излучается с борта БПЛА.
2. Способ по п. 1, отличающийся тем, что в качестве воздушного объекта для размещения приемного устройства используют аэростат или дирижабль.
3. Способ по любому из предшествующих пунктов, отличающийся тем, что на борту воздушного объекта и/или на земле устанавливают устройство для блокирования БПЛА, посредством которого производят блокирование выявленных частот, используемых для организации каналов управления летательными аппаратами.
4. Способ по любому из предшествующих пунктов, отличающийся тем, что посредством системы обработки полученных данных анализируют разницу уровней сигналов между наземным приемным устройством и приемным устройством, находящимся на воздушном объекте, при этом в случае нахождения источника радиоизлучения в воздухе делают вывод о примерной высоте выявленного источника.
5. Способ по любому из предшествующих пунктов, отличающийся тем, что для приемных устройств, находящихся на земле и на воздушном объекте, используют направленные антенны.
6. Способ по любому из пп. 1-4, отличающийся тем, что для приемных устройств, находящихся на земле и на воздушном объекте, используют пеленгационные антенны.
| CN 110658494 A, 07.01.2020 | |||
| US 2020062392 A1, 27.02.2020 | |||
| US 2021120514 A1, 22.04.2021 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ | 2017 |
|
RU2643360C1 |
| WO 2019073230 A1, 18.04.2019 | |||
| МАКУШИН М | |||
| Системы обнаружения радиоуправляемых БПЛА // Журнал "Электроника: Наука, Технология, Бизнес", 2017 г., N 6 (166), сс.82-88, DOI: 10.22184/1992-4178.2017.166.6.82.88 | |||
| ДАЛЬНОМЕРНЫЙ СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2506605C2 |

