Изобретение относится к области космонавтики, а именно к технике выполнения траекторных измерений и определения параметров орбиты космического аппарата (КА), и может быть использовано на наземных и бортовых комплексах управления полетом КА для точного определения текущих параметров движения КА.
Известен способ определения координат КА [1]. Для реализации данного способа последовательно выполняют следующие действия:
размещают на позициях с известными координатами приемную радиотехническую станцию (ПРТС) и не менее трех приемных опорных реперных станций (ПОРС);
принимают и записывают радиосигналы КА совместно с метками времени с помощью ПРТС и указанных ПОРС в момент времени t0;
передают из каждой ПОРС в ПРТС записанные радиосигналы КА совместно с метками времени;
с помощью корреляционной обработки измеряют значения взаимных временных задержек между радиосигналами, записанными ПРТС, и каждой из
вычисляют координаты КА, используя указанные разности дальностей.
К недостатку способа [1] относят относительно невысокую точность определения координат К А, обусловленную необходимостью синхронной записи радиосигналов К А с помощью HP ГС и не менее трех ПОРС.
Известен способ определения координат КА [2]. Для реализации данного способа последовательно выполняют следующие действия:
размещают на позициях с известными координатами приемопередающую радиотехническую станцию (ППРТС) и не мене двух излучающих опорных реперных станций (ИОРС);
в момент времени t0 синхронно излучают тестовые радиосигналы с помощью ППРТС и указанных ИОРС;
принимают и записывают тестовые радиосигналы после их ретрансляции КА с помощью ППРТС и указанных ИОРС;
с помощью корреляционной обработки измеряют значения взаимных временных задержек между переданными и принятыми радиосигналами для ППРТС и каждой из ИОРС;
рассчитывают дальности от КА до ППРТС и каждой из ИОРС;
передают из каждой ИОРС в ППРТС рассчитанное значение дальности;
вычисляют координаты КА, используя рассчитанные дальности.
К недостатку способа [2] относят относительно-невысокую точность определения координат КА, обусловленную необходимостью синхронной излучения и записи тестовых радиосигналов КА с помощью ППРТС и не менее двух ИОРС.
Из известных способов наиболее близким аналогом (прототипом) предлагаемого способа по технической сущности является способ определения координат двух космических аппаратов с использованием земных станций и излучающей опорной реперной станции [3]. Для реализации данного способа последовательно выполняют следующие действия:
размещают ПРТС К на позиции с известными координатами,
выбирают основной космический аппарат (ОКА) и смежный космический аппарат (СКА) с неизвестными координатами;
устанавливают на земной поверхности ИОРС на позиции с известными координатами хН, yН, zH,
излучают в момент времени t0 тестовый радиосигнал с помощью ИОРС;
принимают реализации тестового радиосигнала с помощью ПРТС после его ретрансляции ОКА и СКА; измеряют в ПРТС с использованием корреляционной обработки радиосигналов значения временных задержек ΔtH1 иΔtH2 между переданным тестовым радиосигналом и его принятыми реализациями после ретрансляции ОКА и СКА;
принимают в момент времени to с помощью ПРТС радиосигналы, переданные выбранными земными станциями (ЗС) In размещенными на позициях с известными координатами xIn, yIn, zIn, где n=1…N - номер ЗС, N≥4;
для каждой n-й ЗС In измеряют в НРТС значения временных задержек между принятыми радиосигналами после их ретрансляции от ОКА и СКА соответственно;
на основе временных задержек радиосигналов системы вычисляют координаты ОКА и СКА.
Недостатком способа прототипа [3] является относительно-невысокая точность определения координат двух КА, обусловленная отсутствием возможности выбора нужного количества ЗС с требуемой топологией (максимальными взаимными удалениями).
Техническим результатом при использовании заявленного способа является повышение точности определения координат ОКА и СКА за счет совместного использования ППРТС, земных станций и ИОРС.
Указанный технический результат достигается тем, что в известном способе определения координат двух космических аппаратов с использованием земных станций и излучающей опорной реперной станции (по патенту №2787890) включающим: размещение радиотехнической станции (РТС) и ИОРС на позициях с известными координатами xK, yK, zK и xH, yH, zH соответственно, выбор начальных значений параметров орбит ОКА и СКА, имеющих общий участок диапазона частот линии "вверх" и пересекающиеся зоны покрытия, выбор земных станций, значения номиналов излучаемых частот которых входят в диапазоны частот линии”вверх” ОКА и СКА и каждая из ЗС находится одновременно в зонах покрытия ОКА и СКА, излучение в момент времени to тестового радиосигнала ИОРС со значением номинала частоты ƒH, прием реализаций тестового радиосигнала с помощью РТС после его ретрансляции ОКА и СКА, измерение в РТС с использованием корреляционной обработки радиосигналов значений временных задержек ΔtH1, и ΔtH2 между переданным тестовым радиосигналом и его принятыми реализациями после ретрансляции ОКА и СКА, прием в момент времени t0 с помощью РТС радиосигналов, переданных земными станциями и ретранслированных ОКА и СКА, на основе временных задержек радиосигналов системы, а также известных координат РТС, ЗС и ИОРС вычисление координат ОКА x1, y1, z1 и СКА х2, у2, z2 в момент времени t0, в качестве РТС используют приемно-передающую радиотехническую станцию (ППРТС).
Выбирают ЗС, размещают ППРТС и ОИРС так, чтобы взаимные расстояния между ними были максимальными, а их позиции одновременно находились бы в зонах покрытия ОКА и СКА в момент времени t0.
Излучают в момент времени t0 тестовый радиосигнал ППРТС со значением номинала частоты ƒK. Принимают реализации тестового радиосигнала с помощью ППРТС после его ретрансляции ОКА и СКА. Измеряют в ППРТС с использованием корреляционной обработки радиосигналов значения временных задержек ΔtK1, и ΔtK2 между переданным тестовым радиосигналом и его принятыми реализациями после ретрансляции ОКА и СКА. Рассчитывают длины траектории ОКА - ППРТС и СКА - ППРТС используя значение измеренных временных задержек , ΔtK1 и ΔtK2.
Рассчитывают длины траектории ИОРС - ОКА и ИОРС - СКА используя значение измеренных временных задержек ΔtH1, ΔtH2 и рассчитанных длин траекторий ОКА - ППРТС и СКА - ППРТС.
Для каждой ЗС с известными координатами x1n, y1n, z1n, где n=X…N - номер ЗС, N≥2, измеряют в ППРТС с использованием корреляционной обработки радиосигналов значения временной задержки Δtn между принятыми радиосигналами после их ретрансляции ОКА и СКАсоответственно. Для каждой ЗС рассчитывают разницу длин ΔRn траекторий n-я ЗС - ОКА и n-я ЗС - СКА на основе измеренных временных задержек Δtn.
Используя рассчитанные длины траекторий ОКА - ППРТС и СКА -ППРТС, рассчитанные длины траекторий ИОРС - ОКА и ИОРС - СКА, рассчитанные разницы длин ΔRn траекторий n-я ЗС - ОКА и n-я ЗС - СКА, известные координаты ППРТС xK, yK, zK, ЗС xH, yH, zH, и ИОРС xH, yH, zH, вычисляют координаты ОКА х1,у1, z1 и СКА х2, у2, z2.
Значения номиналов излучаемых частот ƒH и ƒк и тестовых радиосигналов входят в диапазоны частот на линии “вверх” для ОКА и СКА.
Благодаря перечисленной новой совокупности существенных признаков, за счет использования ППРТС на позиции с известными координатами xK, yK, zK, ИОРС на позиции с известными координатами xH, yH, zH, а также ЗС In размещенных на земной поверхности на позициях с известными координатами xIn, yIn, zIn, где n=1…N - номер ЗС, N≥2 достигается цель изобретения: повышение точности определения координат двух КА - ОКА и СКА.
Заявленные изобретения поясняются чертежами, на которых показаны:
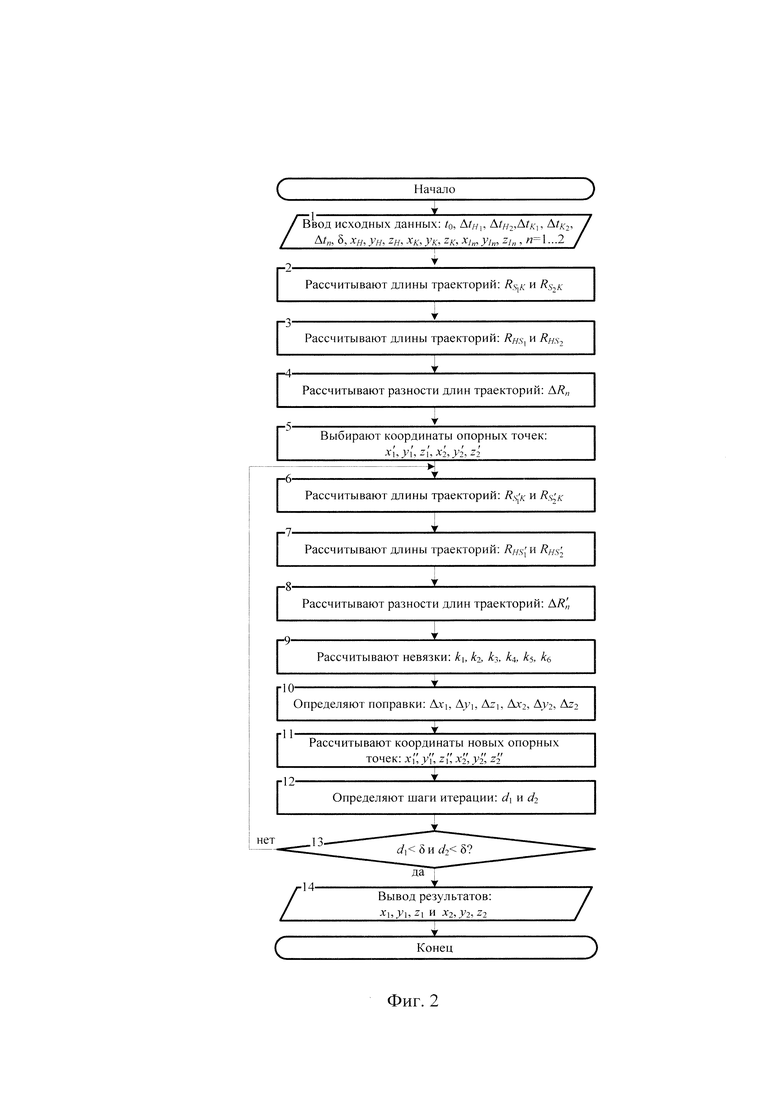
на фиг. 1 - структурная схема системы определения координат двух К А - ОКА и СКА с использованием ППРТС, двух ЗС и ИОРС;
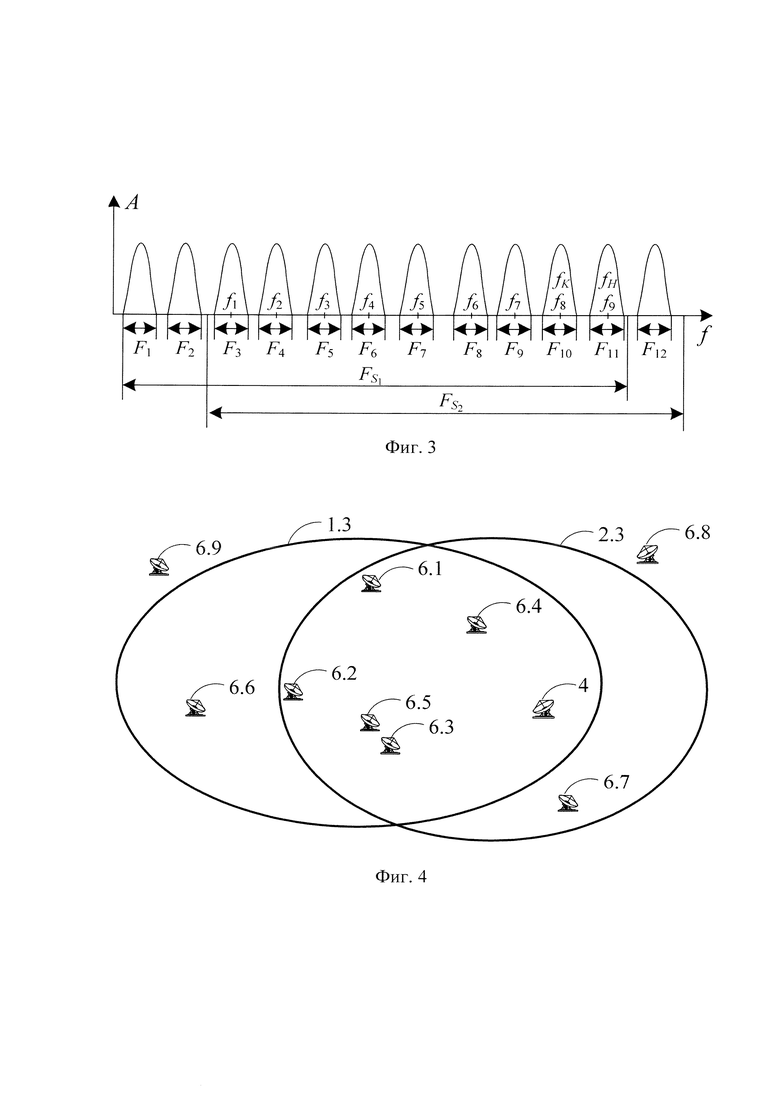
на фиг. 2 - схема алгоритма расчета координат ОКА и СКА с использованием ППРТС, двух ЗС и ИОРС;
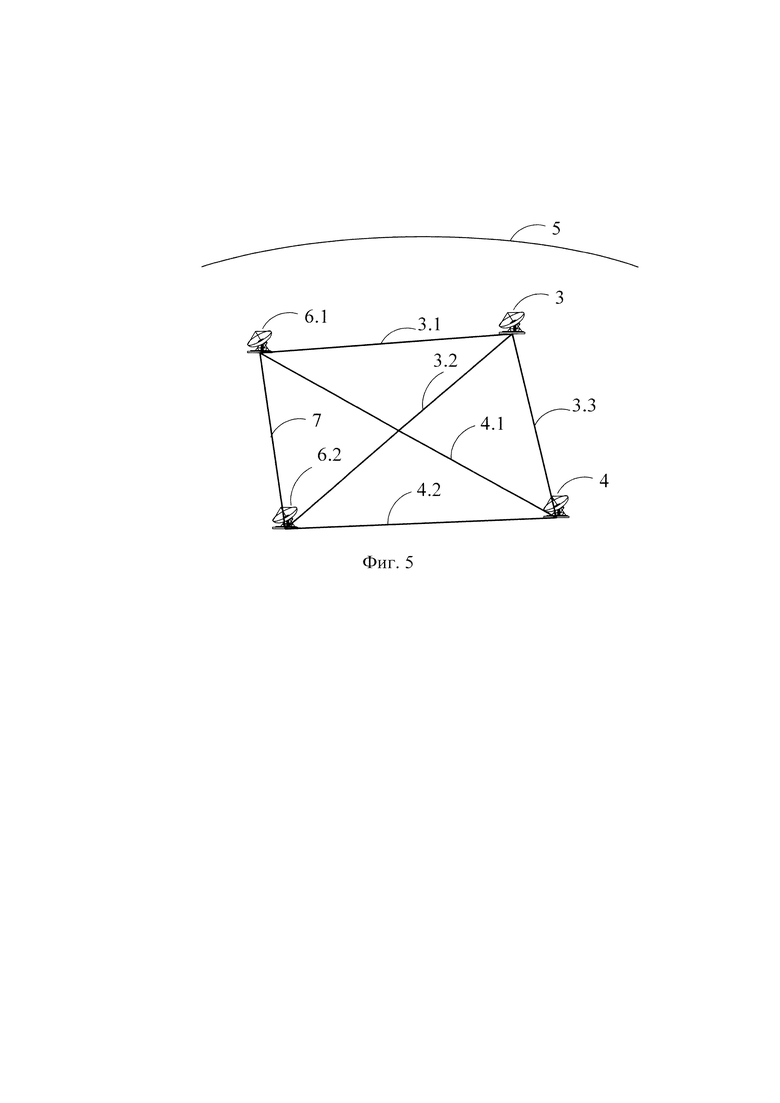
на фиг. 3 - схема выбора ЗС и выбора значений номиналов частот тестовых радиосигналов ППРТС и ИОРС с учетом диапазонов частот линии "вверх" ОКА и СКА и номиналов излучаемых частот ЗС;
на фиг. 4 - схема выбора ЗС и выбора района установки ИОРС с учетом зон покрытия ОКА и СКА;
на фиг. 5 - пример схемы топологии размещения ППРТС, двух ЗС и ИОРС.
Основополагающей предпосылкой настоящего изобретения является наличие помимо ОКА S\, через который организуется канал связи междуземными станциями, СКА S2, который способен ретранслировать те же самые радиоизлучения что и ОКА, но с большим ослаблением и другой частотой переноса. Таким образом, возможно получение за счет корреляционной обработки радиосигналов значения временных задержек Δtn [4] между радиосигналами принятыми от ОКА S\ и СКА S2, принятых радиосигналов после их ретрансляции ОКА S1 и СКА S2 соответственно для каждой из выбранных ЗС In. Кроме того, в настоящем изобретении используют значения временных задержек ΔtK1 и ΔtK2 между излученным и принятыми тестовыми радиосигналами ППРТС после ретрансляции ОКА и СКА соответственно и временных задержек , ΔtH1 и ΔtH2 между излученным и принятыми тестовыми радиосигналами ИОРС после ретрансляции ОКА и СКА соответственно.
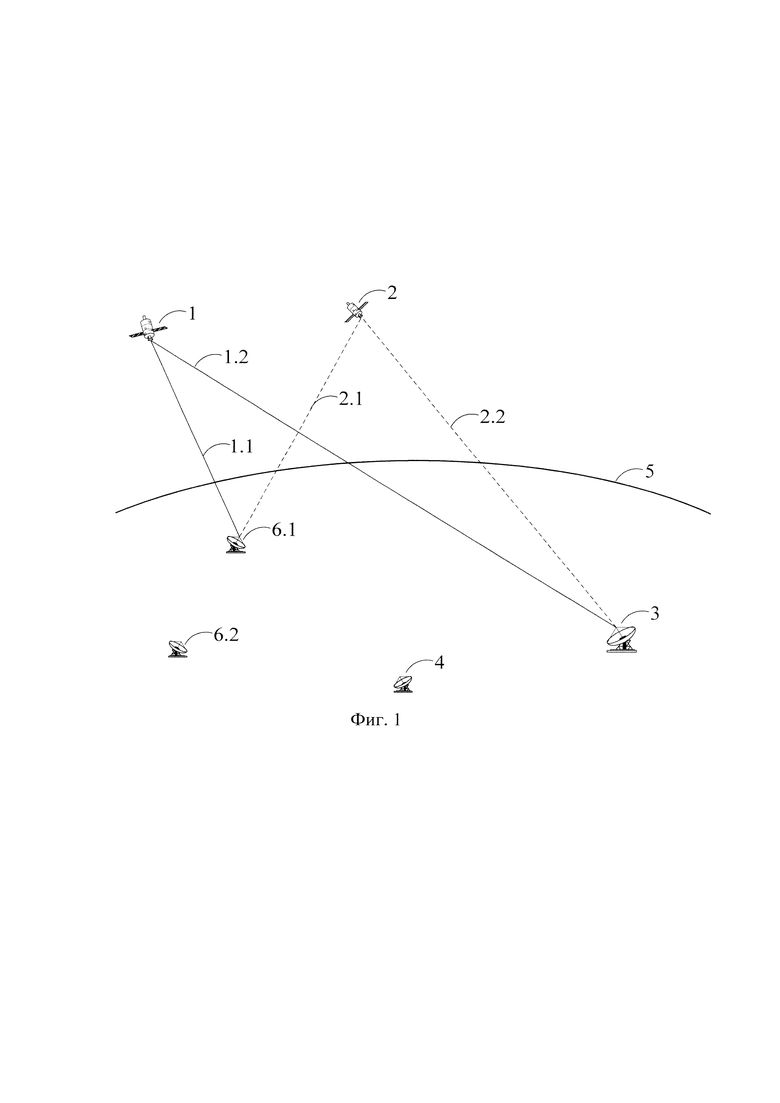
Система определения координат ОКА x1,y1,z1 и СКА х2, y2, z2 в момент времени t0 содержит: ППРТС К с известными координатами xK, yK, zK, ИОРС Н с известными координатами xH, yH, zH, а также N≥2 выбранных ЗС In n=1…N (см. фиг. 1) на позициях с известными координатами xIn, yIn, zIn, излучающие радиосигналы в направлениях на ОКА и СКА.
На фиг. 1 цифрами обозначены: 1 - ОКА; 1.1 - расстояние Rs1I1 между ОКА и первой ЗС; 1.2 - расстояние RS1K между ОКА и ППРТС; 2 - СКА; 2.1 - расстояние между СКА и первой ЗС Rs2I{, 2.2 - расстояние Rs2k между СКА и ППРТС; 3 - ППРТС К; 4 - ИОРС Я; 5 - линия горизонта; 6.1 - первая ЗCI1 6.2 - вторая ЗС I2.
Для каждой n-й ЗС возможно ввести обозначения: Rs1In - расстояния между ОКА S1 и n-й ЗС In; Rs2In - расстояния между СКА S2 и n-й ЗС In. Для ИОРС возможно ввести обозначения: Rs1H - расстояния между ОКА S1 и ИОРС Н; Rs2H - расстояния между СКА S2 и ИОРС Н.
На фиг. 1 помимо ИОРС Н представлено две ЗС, как минимально необходимое количество ЗС для однозначного одномоментного определения координат ОКА x1,y1,z1 и СКА х2,y2, z2 по предлагаемому способу.
Заявленный способ определения координат ОКА х1, у1, z1 и СКА х2, y2, z2 включает: измерение в ППРТС за счет корреляционной обработки радиосигналов значения временных задержек ΔtK1 и ΔtK2 между переданным ППРТС тестовым радиосигналом и его принятыми реализациями после ретрансляции ОКА и СКА; измерение в ППРТС за счет корреляционной обработки радиосигналов значения временных задержек ΔtH1 и ΔtH2 между переданным ИОРС тестовым радиосигналом и его принятыми реализациями после ретрансляции ОКА и СКА; измерение в ППРТС за счет корреляционной обработки радиосигналов для каждой n-й ЗС значений временных задержек Δtn, между принятыми радиосигналами после их ретрансляции ОКА и СКА соответственно; расчет координат ОКА х1, у1, z1 и СКА х2, y2, z2 на основе указанных временных задержек радиосигналов системы.
Для одномоментного и однозначного определения координат ОКА и СКА по заявляемому способу необходимо использование ППРТС, двух ЗС и ИОРС. Дальнейшее увеличение количества ЗС будет приводить к повышению точности определения координат ОКА и СКА без изменения сущности заявляемого способа.
В качестве примера в приложении А представлен алгоритм определения координат ОКА и СКА с использованием ППРТС К, двух ЗС In и ИОРС Н. Выходными результатами представленного алгоритма выступают координаты ОКА x1,y1,z1 и СКА х2, у2, z2 в момент времени to.
На фиг. 3 в качестве примера представлена схема выбора ЗС, а также номиналов частот излучения тестовых радиосигналов ППРТС /к и ИОРС /н с учетом диапазонов частот линии “вверх” ОКА Fs1 и СКА Fs2, а также диапазонов частот ЗС F1…F12, расположенных в районах зон покрытия ОКА FS1 и СКА Fs2. По оси абсцисс на фиг. 5 отложены частоты ƒ, по оси ординат - амплитуды А.
Анализ схемы (фиг. 3) показывает, что в диапазон частот линии “вверх” ОКА Fs1 входят диапазоны частот ЗС F1…F11. а в диапазон частот линии "вверх" СКА Fs2 входят диапазоны частот F3…F12 ЗС. Таким образом, одновременно в диапазоны частот линии “вверх” ОКА Fs1 и СКА Fs2, входят диапазоны частот ЗС F3…F11. На схеме (фиг. 3) введены обозначения номиналов излучаемых частот -ƒ1…ƒ9 указанных ЗС F3…F11.
В качестве номинала частоты излучения тестового радиосигнала ППРТС ƒK выбрана средняя частота диапазона F10, поскольку она входит в диапазоны частот линий “вверх” и для ОКА, и для СКА.
В качестве номинала частоты излучения тестового радиосигнала ИОРС ƒH выбрана средняя частота диапазона F11, поскольку она входит в диапазоны частот линий “вверх” и для ОКА, и для СКА.
На фиг. 4 в качестве примера представлена схема выбора ЗС с учетом зон покрытия ОКА Ω1 и СКА Ω2
На фиг. 4 цифрами обозначены: 1.3 - зона покрытия ОКА Ω1; 2.3 - зона покрытия ОКА Ω2, 4 - ИОРС H; 6.1 - первая ЗС I1; 6.2 - вторая ЗС I2; 6.3 -третья ЗС I3; 6.4 - четвертая ЗС I4; 6.5 - пятая ЗС I5; 6.6 - шестая ЗС I6; 6.7 -седьмая ЗС I7, 6.8 - восьмая ЗС I8; 6.9 - девятая ЗС I9.
Анализ схемы (фиг. 4) показывает, что в зоне покрытия ОКА Ω1 находятся ЗС I1, I2 I3 I4 I5 I6 и ИОРС H, а в зоне покрытия СКА Ω2 находятся ЗС I1, I2 I3 I4 I5 I6 I7 и ИОРС H. Таким образом, одновременно в зонах покрытия ОКА Ω1 и СКА Ω2 находятся ЗС I1, I2 I3 I4 I5 и ИОРС Я.
При выборе ЗС учитывают топологию размещения всех ЗС In и ИОРС H от которой зависит точность определения координат ОКА x1,y1,z1 и СКА х2, y2, z2. Под топологией размещения ЗС In и ИОРС понимают их взаимное расположение на поверхности Земли. При этом в качестве важных показателей при выборе ЗС выступают взаимные расстояния RInIm между n-й и m-й ЗС, где m=1…N, m≠n, расстояния RInK между n-й ЗС и ППРТС, расстояния RInH между n-й ЗС и ИОРС, расстояние RKH между ППРТС и ИОРС, которые должны быть максимальными.
На фиг. 5 в качестве примера представлена схемы топологии размещения ППРТС К, двух ЗС I1, I2 и ИОРС H для определения координат ОКА х1, у1, z1 и СКА Х2, у% z2. Указанные ЗС выбирались исходя из сопоставления позиционных районов ЗС и ИОРС отображенных на фиг. 4 и фиг. 5, так, что бы взаимные расстояния RI1K, RI2K, RI1H, RI2H, RI1I2, RKH были максимальными.
На фиг. 5 цифрами обозначены: 3 - ППРТС К; 4 - ИОРС H; 5 - линия горизонта; 6.1 - первая ЗС I1; 6.2 - вторая ЗС I2; 3.1 - расстояние между ППРТС и первой ЗС RI1K; 3.2 - расстояние между ППРТС и второй ЗС RI2K; 3.3 - расстояние между ППРТС и ИОРС и третьей ЗС RKH; 4.1 - расстояние между ИОРС и первой расстояние между ИОРС и второй ЗС RI2H; 7 - расстояние между первой и второй ЗС RI1I2.
Имитационное моделирование на основе программ для ЭВМ [5, 6] заявленных способов показало возможность повышения точности определения координат ОКА х1, у1, z1 и СКА х2, y2, z2 по сравнению со способом прототипом на 10…15% (в зависимости от топологии сравниваемых систем).
Источники информации
1. Агиевич С.Н., Беспалов В.Л., Дедовская Э.Г., Матюхин А.С., Подъячев П.А., Севидов В.В. Способ определения параметров орбиты искусственного спутника Земли с использованием приемных опорных реперных станций. Патент №2702098 МПК G01S 5/00 (2006.01). Бюл. №28 от 04.10.19. Заявка №2018127491 от 25.07.18.
2. Агиевич С.Н., Ватутин В.М., Матюхин А.С., Модин М.И., Севидов В.В. Способ определения параметров орбиты искусственного спутника Земли с использованием приемо-передающих опорных реперныхстанций. Патент №2708883. МПК G01S 5/00 (2006.01). Бюл. №35 от 12.12.19. Заявка №2018134855 от 01.10.18.
3. Агиевич С.Н., Андросов В.В., Жбанов И.Л., Журавлев Д.А., Калуцкий Р.П., Севидов В.В., Селезнев А.В., Фокин Г.А., Харченко В.Е. Способ определения координат двух космических аппаратов с использованием земных станций (ЗС) и излучающей опорной реперной станции (ИОРС). Патент №2787890. МПК G01S 5/00 (2022.08). Бюл. №2 от 13.01.23. Заявка №2022109073 от 05.04.22.
4. Волков Р.В., Саяпин В.Н., Севидов В.В. Модель измерения временной задержки и частотного сдвига радиосигнала, принятого от спутника-ретранслятора при определении местоположения земной станции // T-Comm: Телекоммуникации и транспорт.2016. Том 10. №9. С. 14-18.
5. Волков Р.В., Саяпин В.Н., Севидов В.В. Модель движения искусственного спутника Земли // Программы для ЭВМ №2016611148. Опубл. 27.01.2016. Бюл. №2. Заявка №2015661948 от 08.12.2015.
6. Севидов В.В. Определение координат и параметров движения источника радиоизлучения на основе разностно-временных и разностно-доплеровских измерений // Программы для ЭВМ №2015661288. Опубл. 20.11.2015. Бюл. №11. Заявка №2015618595 от 08.09.2015.
Приложение А
Алгоритм определения координат ОКА и СКА с использованием двух ППРТС, двух ЗС и ИОРС
Алгоритм определения координат ОКА х1, у1, z1 и СКА х2, у2, z2 с использованием ППРТС К, размещенной на позиции с известными координатами xK,yK, zK, ЗС In, где n=1…N- номер ЗС, N≥2, размещенных на позициях с известными координатами xIn, yIn, zIn и ИОРС Н размещенной на позиции с известными координатами хН, yH, zH, основан на том, что временным задержкам ΔtK1 и ΔtK2 соответствуют длины Rs1K и Rs2K траекторий S1K и S2K, временным задержкам ΔtH1, и ΔtH2 соответствуют длины RHS1K и RHS2K траекторий HS1K и HS2K соответственно, а каждой из временных задержек Δtn соответствует разности ΔRn длин RIns1 и RIns2 траекторий InS1 и InS2.
В качестве примера в настоящем приложении представлен вариант с ППРТС, двумя ЗС (N=2) и ИОРС как минимально необходимого состава для однозначного одномоментного определения координат ОКА х1, у1, z1 и СКА х2, y2, z2 по заявляемому способу.
Для длин Rs1K и Rs2K траекторий S1K и S2K справедливы уравнения:


где с=3×108 м/с - скорость света в вакууме.
Для длин RHS12 и RHS2 траекторий HS1 и HS2 справедливы уравнения: 

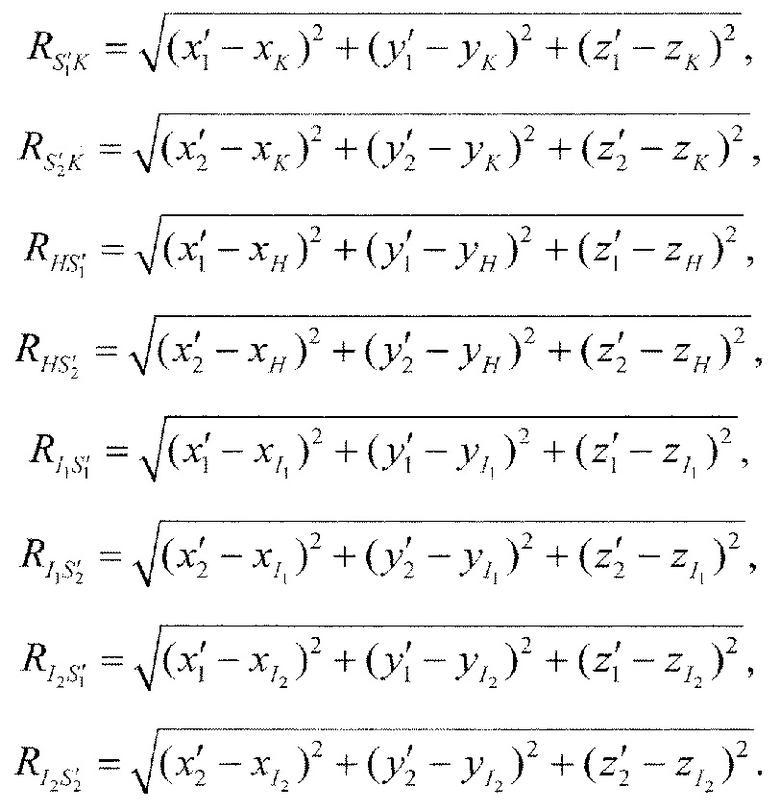
Выражения для длин RInS1K и RInS1K траекторий InS1K и InS2K возможно записать в виде:


Для разностей расстояний от ОКА и СКА ΔRn до n-й ЗС справедливо:

Составляют систему из шести уравнений (уравнения (АЛ), (А.2), (А.3) и (А.4) и два уравнения (А.7) для n=1 и n=2):
V. 
Решением системы уравнений (А. 8), является шесть корней -координаты ОКА x\,y\,z1 и СКА х2, у2, z2 в момент времени t0.
Для расчета координат ОКА х1, у1, z1 и СКА х2, у2, z2 в момент времени t0 с использованием двух ЗС и ИОРС разработан алгоритм, схема которого представлена на фиг. 2.
На этапе 1 производят ввод исходных данных, в качестве которых выступают: момент времени измерения to; координаты ППРТС xK, yK, zK, координаты двух ЗС xIn, yIn, zIn; координаты ИОРС xH, yH, zH; временные задержки ΔtK1, и ΔtK2 между излученным и принятым тестовымрадиосигналом ППРТС после его ретрансляции ОКА и СКА соответственно; временные задержки ΔtH1 и ΔtH2 между излученным и принятым тестовым радиосигналом ИОРС после его ретрансляции ОКА и СКА соответственно; временные задержки между радиосигналами принятыми от ОКА и СКА для каждой из выбранных ЗС Δtn; порог точности 6 расчета координат ОКА и СКА.
На этапе 2 рассчитывают длины Rs1K и Rs2K траекторий S1K и S2K по формулам (А.1), (А.2):

На этапе 3 рассчитывают длины RHS1u RHS2 траекторий HS1 и HS2 по формулам (А.3), (А.4):

На этапе 4 рассчитывают разности расстояний от ОКА и СКА ΔRn, до n-й ЗС по формулам

На этапе 5 выбирают, на основе элементов Кеплеровой орбиты ОКА и СКА, координаты опорных точек  как первых приближений к координатам ОКА и СКА соответственно.
как первых приближений к координатам ОКА и СКА соответственно.
На этапе 6 рассчитывают длины Rs'1K и Rs'2K траекторий S'1K и S'2K при условии равенства координат ОКА и СКА координатам опорных точек
 по формулам:
по формулам:
На этапе 7 рассчитывают длины RHS'1 и RHS'1 траекторий HS'1 и HS'2 при условии равенства координат ОКА и СКА координатам опорных точек
 по формулам:
по формулам:
На этапе 8 рассчитывают разности расстояний от ОКА и СКА ΔR'n до n-й ЗС при условии равенства координат ОКА и СКА координатам опорных точек  по формулам:
по формулам:
На этапе 9 рассчитывают невязки k1, k2, k3, k4, k5 и k6. Невязки k1 и k2 рассчитывают как разницы между определенными на этапе 6 длинами  траекторий S'1K и S'2K, а также длинами RS1K и RS2K траекторий S'1K и S'2K, определенными на этапе 2 соответственно:
траекторий S'1K и S'2K, а также длинами RS1K и RS2K траекторий S'1K и S'2K, определенными на этапе 2 соответственно:

Невязки k3 и k4 рассчитывают как разницы между определенными на этапе 7 длинами  траекторий HS'1 и HS'2, а также длинами Rs1K uRs2K траекторий S1K и S2K, определенными на этапе 3 соответственно:
траекторий HS'1 и HS'2, а также длинами Rs1K uRs2K траекторий S1K и S2K, определенными на этапе 3 соответственно:

Невязки k5 и k6 рассчитывают как разницы между определенными на этапе 8 разностями длин ΔR'n, и разностями длин ΔRn, определенными на этапе 4 соответственно:

На этапе 10 определяют поправки к координатам ОКА Δx1, Δу2, Δz1 и СКА Δх2, Δу2, Δz2.
Для определения поправок к координатам ОКА Δх1, Δу1, Δz1 и СКА Δх2, Δу2, Δх2 предварительно формируют систему линейных уравнений приразложении в ряд Тейлора функций _ с точностью до первых членов:
с точностью до первых членов:
где частные производные рассчитывают согласно выражениям 
с
а расстояния  в свою очередь рассчитывают по формулам
в свою очередь рассчитывают по формулам
Решая систему линейных уравнений (А.9) одним из известных методов, например, методом Крамера, получают поправки к координатам ОКА Δx1 Δy1, Δz1 и СКА КА Δх2, Δу2, Δz2.
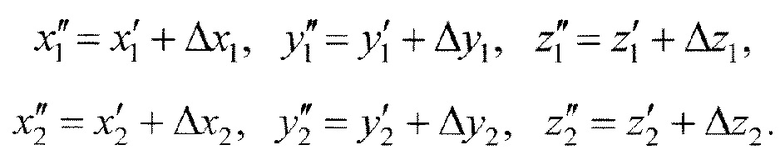
На этапе 11 рассчитывают координаты новых опорных точек

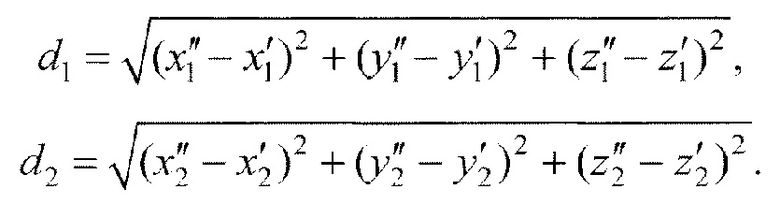
Этапы 5-11 в совокупности составляют первую итерацию. Далее итерации повторяют, используя каждый раз новые опорные точки, полученные на предыдущей итерации. Количество необходимых итераций зависит требуемой точности определения координат ОКА и СКА. С точностью определения координат ОКА и СКА напрямую связаны шаги итерации d1 и d2 соответственно.
На этапе 12 определяют шаги итерации d1 и d2 как расстояния между текущими и предыдущими опорными точками:
На этапе 13 сравнивают d1 и d2 с порогом 8, задаваемым на этапе 1.
Необходимое число итераций, как правило, составляет 2…4. В качестве координат ОКА х1, у1, z1 и СКА х2, у2, z2 выбирают значения координат опорных точек на последней итерации, вывод которых осуществляют на этапе 14.
В общем случае, когда количество ЗС N≥2, алгоритм определения координат ОКА и СКА остается прежним, с той лишь разницей, что система уравнений (А.8) будет содержать N+4 уравнений. Тогда такую систему уравнений решают, например, методом наименьших квадратов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат космического аппарата с использованием земных станций и излучающей опорной реперной станции | 2023 |
|
RU2803662C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ И ИЗЛУЧАЮЩЕЙ ОПОРНОЙ РЕПЕРНОЙ СТАНЦИИ | 2022 |
|
RU2787890C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ И ИЗЛУЧАЮЩЕЙ ОПОРНОЙ РЕПЕРНОЙ СТАНЦИИ | 2023 |
|
RU2805667C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ВЕКТОРОВ СКОРОСТИ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ И ИЗЛУЧАЮЩЕЙ ОПОРНОЙ РЕПЕРНОЙ СТАНЦИИ | 2023 |
|
RU2822690C1 |
| Способ определения ортогональных составляющих вектора скорости космического аппарата с использованием земной станции и излучающей опорной реперной станции | 2023 |
|
RU2801257C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ВЕКТОРОВ СКОРОСТИ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ И ИЗЛУЧАЮЩЕЙ ОПОРНОЙ РЕПЕРНОЙ СТАНЦИИ | 2022 |
|
RU2791153C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ И ИЗЛУЧАЮЩЕЙ ОПОРНОЙ РЕПЕРНОЙ СТАНЦИИ | 2021 |
|
RU2788518C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ | 2020 |
|
RU2750753C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ВЕКТОРОВ СКОРОСТЕЙ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ | 2020 |
|
RU2750983C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ВЕКТОРОВ СКОРОСТЕЙ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ | 2020 |
|
RU2749878C1 |
Изобретение относится к технике выполнения траекторных измерений, определения координат космических аппаратов (КА) и может быть использовано на наземных и бортовых комплексах управления полетом КА для точного определения текущих параметров движения КА. Техническим результатом изобретения является повышение точности определения координат КА за счет передачи и приема тестовых радиосигналов приемно-передающей радиотехнической станцией (ППРТС), выбора земных станций (ЗС) и размещения ППРТС, излучающей опорной реперной станции (ИОРС) так, чтобы взаимные расстояния между ними были максимальными, а их координаты одновременно находились бы в зонах покрытия ОКА и СКА в момент времени t0. Способ определения координат ОКА х1,y1и z1 и СКА х2, y2, z2 включает: измерение в ППРТС за счет корреляционной обработки радиосигналов значения временных задержек ΔtK1 и ΔtK2 между переданным тестовым радиосигналом ППРТС и его принятыми реализациями после ретрансляции ОКА и СКА; измерение в ППРТС за счет корреляционной обработки радиосигналов значения временных задержек ΔtH1 и ΔtH2 между переданным тестовым радиосигналом ИОРС и его принятыми реализациями после ретрансляции ОКА и СКА; измерение в ППРТС за счет корреляционной обработки радиосигналов для каждой n-й ЗС значений временных задержек Δtn между принятыми радиосигналами после их ретрансляции ОКА и СКА соответственно; расчет координат ОКА х1, у1, z1 и СКА х2, y2, z2 на основе указанных временных задержек радиосигналов системы. 1 з.п. ф-лы, 5 ил.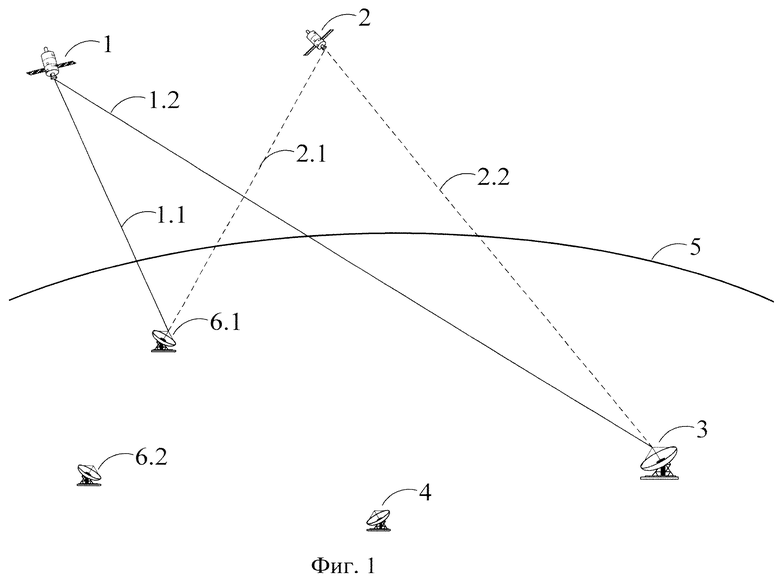
1. Способ определения координат двух космических аппаратов с использованием земных станций (ЗС) и излучающей опорной реперной станции (ИОРС), заключающийся в том, что размещают радиотехническую станцию (РТС) и ИОРС на позициях с известными координатами xK, yK, zK и xH, yH, zH соответственно, выбирают начальные значения параметров орбит основного космического аппарата (ОКА) и смежного космического аппарата (СКА), имеющих общий участок диапазона частот линии “вверх” и пересекающиеся зоны покрытия, выбирают земные станции, значения номиналов излучаемых частот которых входят в диапазоны частот линий “вверх” ОКА и СКА, и каждая из ЗС находится одновременно в зонах покрытия ОКА и СКА, излучают в момент времени t0 тестовый радиосигнал ИОРС со значением номинала частоты ƒH, принимают реализации тестового радиосигнала с помощью РТС после его ретрансляции ОКА и СКА, измеряют в РТС с использованием корреляционной обработки радиосигналов значения временных задержек ΔtH1 и ΔtH2 между переданным тестовым радиосигналом и его принятыми реализациями после ретрансляции ОКА и СКА, принимают в момент времени t0 с помощью РТС радиосигналы, переданные земными станциями и ретранслирванные ОКА и СКА, на основе временных задержек радиосигналов системы, а также известных координат РТС, ЗС и ИОРС вычисляют координаты ОКА х1, у1, z1 и СКА х2, у2, z2 в момент времени t0, отличающийся тем, что в качестве РТС используют приемно-передающую радиотехническую станцию (ППРТС), выбирают ЗС, размещают ППРТС и ОИРС так, чтобы взаимные расстояния между ними были максимальными, а их позиции одновременно находились бы в зонах покрытия ОКА и СКА в момент времени t0, излучают в момент времени t0 тестовый радиосигнал ППРТС со значением номинала частоты ƒK, принимают реализации тестового радиосигнала с помощью ППРТС после его ретрансляции ОКА и СКА, измеряют в ППРТС с использованием корреляционной обработки радиосигналов значения временных задержек ΔtK1 и ΔtK2 между переданным тестовым радиосигналом и его принятыми реализациями после ретрансляции ОКА и СКА, рассчитывают длины траектории ОКА - ППРТС и СКА – ППРТС, используя значения измеренных временных задержек ΔtK1 и ΔtK2, рассчитывают длины траектории ИОРС - ОКА и ИОРС – СКА, используя значение измеренных временных задержек ΔtH1 и ΔtH2 и рассчитанных длин траекторий ОКА - ППРТС и СКА - ППРТС, для каждой ЗС с известными координатами где n=1…N - номер ЗС, N≥2, измеряют в ППРТС с использованием корреляционной обработки радиосигналов значения временной задержки Δtn между принятыми радиосигналами после их ретрансляции ОКА и СКА соответственно, для каждой ЗС рассчитывают разницу длин ΔRn траекторий n-я ЗС - ОКА и n-я ЗС - СКА на основе измеренных временных задержек Δtn, используя рассчитанные длины траекторий ОКА - ППРТС и СКА - ППРТС, рассчитанные длины траекторий ИОРС - ОКА и ИОРС - СКА, рассчитанные разницы длин AR траекторий n-я ЗС - ОКА и n-я ЗС - СКА, известные координаты ППРТС xK, yK, zK, ЗС
где n=1…N - номер ЗС, N≥2, измеряют в ППРТС с использованием корреляционной обработки радиосигналов значения временной задержки Δtn между принятыми радиосигналами после их ретрансляции ОКА и СКА соответственно, для каждой ЗС рассчитывают разницу длин ΔRn траекторий n-я ЗС - ОКА и n-я ЗС - СКА на основе измеренных временных задержек Δtn, используя рассчитанные длины траекторий ОКА - ППРТС и СКА - ППРТС, рассчитанные длины траекторий ИОРС - ОКА и ИОРС - СКА, рассчитанные разницы длин AR траекторий n-я ЗС - ОКА и n-я ЗС - СКА, известные координаты ППРТС xK, yK, zK, ЗС  и ИОРС xH, yH, zH, вычисляют координаты ОКА x1,y1,z1 и СКА х2, y2, z2.
и ИОРС xH, yH, zH, вычисляют координаты ОКА x1,y1,z1 и СКА х2, y2, z2.
2. Способ по п. 1, отличающийся тем, что значения номиналов излучаемых частот ƒH и ƒK и тестовых радиосигналов входят в диапазоны частот на линии “вверх” для ОКА и СКА.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ И ИЗЛУЧАЮЩЕЙ ОПОРНОЙ РЕПЕРНОЙ СТАНЦИИ | 2022 |
|
RU2787890C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ВЕКТОРОВ СКОРОСТЕЙ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ | 2020 |
|
RU2749878C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2017 |
|
RU2652603C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ВЕКТОРОВ СКОРОСТЕЙ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ | 2020 |
|
RU2750983C1 |
| US 20190210746 A1, 11.07.2019 | |||
| CN 108427130 A, 21.08.2018 | |||
| JP 61169784 A, 31.07.1986. | |||

