Изобретение относится к области космонавтики, а именно к технике выполнения траекторных измерений и определения параметров орбиты космического аппарата (КА), и могут быть использованы на наземных и бортовых комплексах управления полетом КА для точного определения текущих параметров движения КА.
Известен способ определения координат КА [1]. Для реализации данного способа последовательно выполняют следующие действия:
размещают на позициях с известными координатами приемную радиотехническую станцию (ПРТС) и не менее трех приемных опорных реперных станций (ПОРС);
принимают и записывают радиосигналы КА совместно с метками времени с помощью ПРТС и указанных ПОРС в момент времени t0;
передают из каждой ПОРС в ПРТС записанные радиосигналы КА совместно с метками времени;
с помощью корреляционной обработки измеряют значения взаимных временных задержек между радиосигналами, записанными ПРТС и каждой из ПОРС;
вычисляют координаты КА, используя указанные разности дальностей.
К недостатку способа [1] относят относительно-невысокую точность определения координат КА, обусловленную необходимостью синхронной записи радиосигналов КА с помощью НРТС и не менее трех ПОРС.
Известен способ определения координат КА [2]. Для реализации данного способа последовательно выполняют следующие действия:
размещают на позициях с известными координатами приемопередающую радиотехническую станцию (ППРТС) и не мене двух излучающих опорных реперных станций (ИОРС);
в момент времени t0 синхронно излучают тестовые радиосигналы с помощью ППРТС и указанных ИОРС;
принимают и записывают тестовые радиосигналы после их ретрансляции КА с помощью ППРТС и указанных ИОРС;
с помощью корреляционной обработки измеряют значения взаимных временных задержек между переданными и принятыми радиосигналами для ППРТС и каждой из ИОРС;
рассчитывают дальности от КА до ППРТС и каждой из ИОРС;
передают из каждой ИОРС в ППРТС рассчитанное значение дальности;
вычисляют координаты КА, используя рассчитанные дальности.
К недостатку способа [2] относят относительно-невысокую точность определения координат КА, обусловленную необходимостью синхронной излучения и записи тестовых радиосигналов КА с помощью ППРТС и не менее двух ИОРС.
Из известных способов наиболее близким аналогом (прототипом) предлагаемого способа по технической сущности является способ определения координат основного космический аппарат (ОКА) [3]. Для реализации данного способа последовательно выполняют следующие действия:
размещают на позиции с известными координатами ПРТС;
выбирают смежный космический аппарат (СКА) с известными значениями координат;
выбирают земные станции (ЗС), размещенные на земной поверхности на позициях с известными координатами;
принимают и записывают с помощью НРТС радиосигналы ЗС после их ретрансляции ОКА и СКА;
измеряют значения взаимных временных задержек радиосигналов ЗС после их ретрансляции ОКА и СКА;
вычисляют координаты ОКА на основе указанных измеренных значений взаимных временных задержек.
Недостатком способа прототипа [3] является относительно-невысокая точность определения координат ОКА, обусловленная отсутствием возможности выбора нужного количества ЗС с максимальными взаимными удалениями.
Техническим результатом при использовании заявленного способа является повышение точности определения координат ОКА за счет совместного использования земных станций и ИОРС.
Указанный технический результат достигается тем, что в известном способе определения координат ОКА (по патенту №2750753) включающим: размещение ПРТС на позиции с известными координатами xK, yK, zK, выбор начальных значений параметров орбиты ОКА, координаты которого необходимо определить, выбор СКА с известными координатами х2, y2, z2, имеющий общий участок диапазона частот на линии “вверх” с ОКА и общую зоны покрытия с зоной покрытия ОКА, выбор земных станций, значения номиналов излучаемых частот которых входят в диапазоны частот на линии "вверх" ОКА и СКА и из ЗС находится в зонах покрытия ОКА и СКА, прием в момент времени t0 с помощью ПРТС радиосигналов, переданных земными станциями и ретранслированных ОКА и СКА, вычисление на основе временных задержек радиосигналов системы координат ОКА х1, у1, z1 в момент времени t0, дополнительно устанавливают на земной поверхности ИОРС на позиции с известными координатами xH, yH, zH, принадлежащими одновременно зонам покрытия ОКА и СКА в момент времени t0.
Излучают в момент времени t0 тестовый радиосигнал ИОРС со значением номинала частоты ƒH. Принимают тестовый радиосигнал с помощью ПРТС после его ретрансляции ОКА. Измеряют в ПРТС с использованием корреляционной обработки радиосигналов значение временной задержки ΔtH между излученным и принятым тестовым радиосигналом. Рассчитывают длину траектории ИОРС - ОКА - ПРТС, используя значение временной задержки ΔtH.
Для каждой n-й ЗС с известными координатами xIn, yIn, zIn, где n=1…N - номер ЗС, N≥2, измеряют в ПРТС с использованием корреляционной обработки радиосигналов значения временной задержки Δtn между принятыми радиосигналами после их ретрансляции ОКА и СКА соответственно.
Рассчитывают N значений длин траекторий ЗС-СКА-ПРТС на основе известных координат каждой из ЗС xIn, yIn, zIn, СКА х2, y2, z2 и ПРТС xK, yK, zK.
Определяют N значений длин траекторий ЗС-ОКА-ПРТС для каждой ЗС, используя длины траекторий ЗС-СКА-ПРТС, а также измеренные временных задержек Δtn,
Вычисляют координаты ОКА х1, у1, z1 с использованием рассчитанных длин траекторий ЗС-ОКА-ПРТС, длины ИОРС-ОКА-ПРТС, известных координат ПРТС xK, yK, zK, ЗС xIn, yIn, zIn и ИОРС xH, yH, zH.
Выбирают земные станции и устанавливают ИОРС так, чтобы взаимные расстояния между n-й и m-й ЗС, где m=1…N, m≠n и расстояния между n-й ЗС и ИОРС были максимальными.
Значение номинала излучаемой частоты ƒH тестового радиосигнала входит в диапазоны частот на линии "вверх" для ОКА и СКА.
Благодаря перечисленной новой совокупности существенных признаков, за счет использования ПРТС на позиции с известными координатами xK, yK, zK, ИОРС на позиции с известными координатами xH, yH, zH, СКА с известными координатами х2, y2, z2 в момент времени t0, а также ЗС In, размещенных на земной поверхности на позициях с известными координатами xIn, yIn, zIn, где n=1…N - номер ЗС, N≥2 достигается цель изобретения: повышение точности определения координат КА.
Заявленные изобретения поясняются чертежами, на которых показаны:
на фиг. 1 - структурная схема системы определения координат ОКА с использованием двух ЗС и ИОРС;
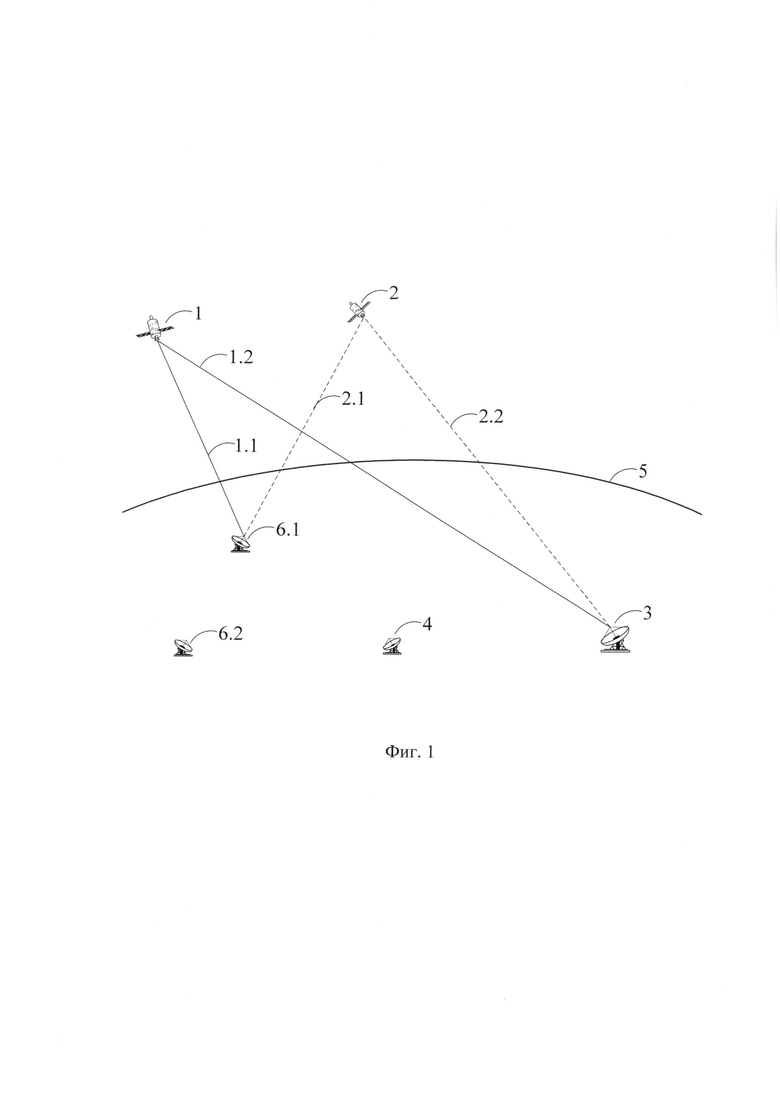
на фиг. 2 - схема алгоритма расчета координат ОКА с использованием двух ЗС и ИОРС;
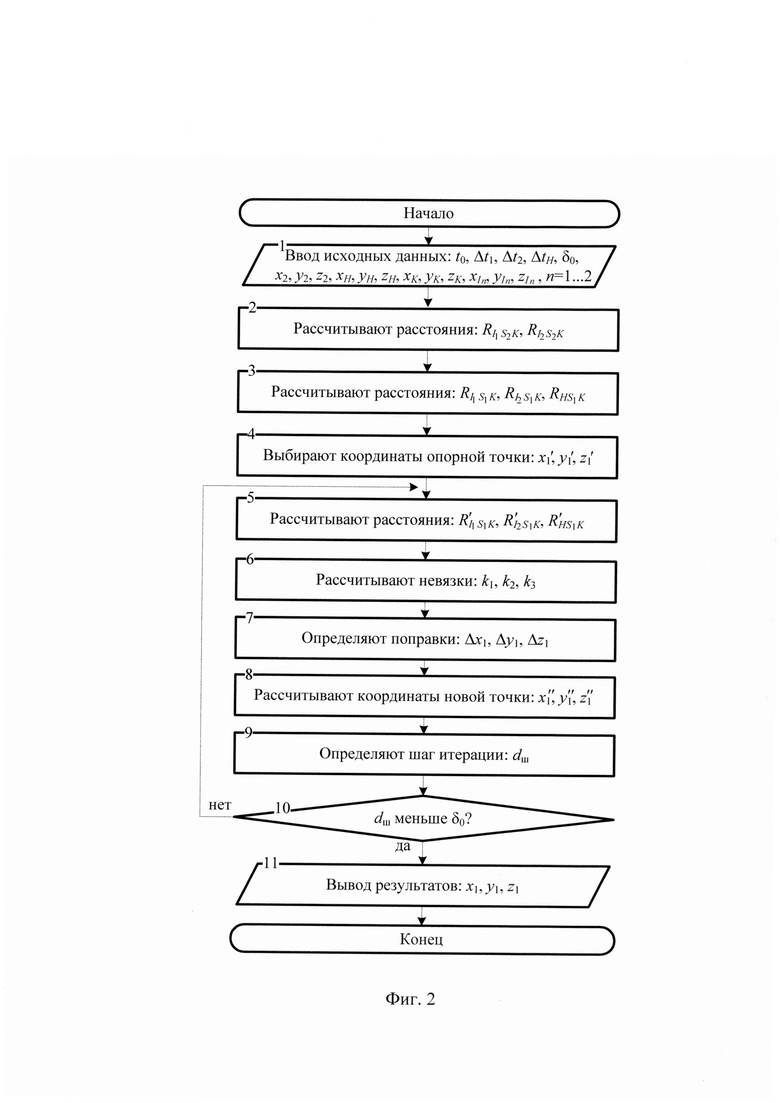
на фиг. 3 - схема выбора ЗС, выбора значения номинала частоты тестового радиосигнала ИОРС с учетом диапазонов частот на линии “вверх” ОКА и СКА, а также номиналов излучаемых частот ЗС;
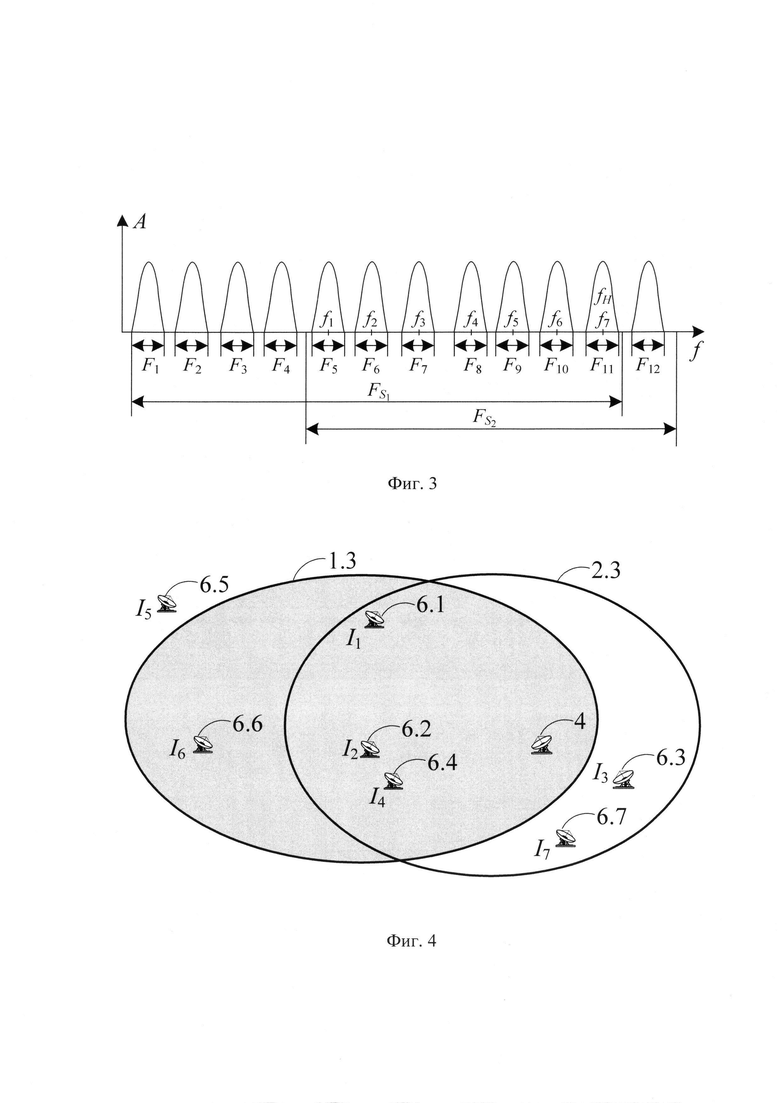
на фиг. 4 - схема выбора ЗС и выбора района установки ИОРС с учетом зон покрытия ОКА и СКА;
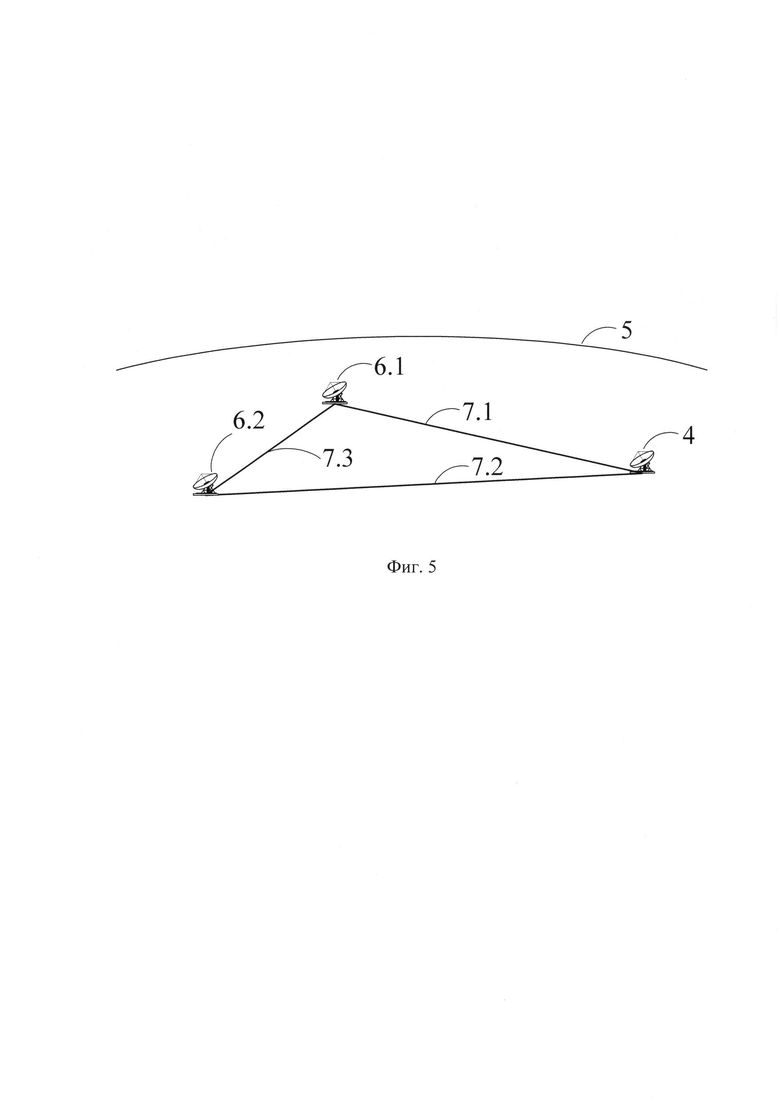
на фиг. 5 - пример схемы топологии размещения двух ЗС и ИОРС.
Теория полета КА, или, как ее еще называют, астродинамика, небесная механика, космическая баллистика, основана на законах И. Кеплера и законе всемирного тяготения И. Ньютона.
В первом приближении движение КА представляется как невозмущенное - такое движение, которое происходило бы только под влиянием силы притяжения Земли по закону Ньютона, т.е. точно соответствует задаче двух тел (Земля - КА) в небесной механике. Это движение называется движением по Кеплеровой орбите, так как подчиняется трем законам Кеплера [4].
Достоинством Кеплеровой орбиты является простота вычисления координат и вектора скорости КА в прогнозируемый момент времени. Это предопределило широкое использование элементов Кеплеровой орбиты. В настоящем изобретении элементы Кеплеровой орбиты КА выступают в качестве априорных данных об КА. С помощью этих элементов ориентируют приемные антенны НРСТ на КА. Кроме того элементы Кеплеровой орбиты КА служат для устранения двузначности определения координат КА.
Недостатком Кеплеровой орбиты является относительно низкая точность определения координат и вектора скорости КА, которая недостаточна для выполнения ряда прикладных задач, например, для корректировки движения КА.
Более точно движение КА описывается с помощью возмущенной орбиты [4, 5], которая задается:
каноническими параметрами КА, включающими координаты КА х1, у1, z1 и ортогональные составляющие вектора его скорости  в начальный момент времени t0,
в начальный момент времени t0,
факторами, приводящими к отклонениям КА от идеальной (Кеплеровой) орбиты и называемыми возмущающими факторами.
Например, для геостационарного КА достаточно учитывать только три фактора, приводящих к отклонениям КА от идеальной (Кеплеровой) орбиты - влияние Солнца, Луны и нецентральности гравитационного поля Земли.
При прогнозе координат КА размещенных на других (не геостационарных) орбитах дополнительно учитывают ряд факторов, приводящих к отклонениям КА от идеальной (Кеплеровой) орбиты. В качестве таких факторов, например, для КА на низких орбитах выступают: влияние сопротивления атмосферы Земли, светового давления, притяжения планет и др.
Таким образом, определение координат КА х1, у1, z1 в начальный момент времени t0 с высокой точностью является важной задачей, которая решена в заявленных технических решениях.
На фиг. 1 цифрами обозначены: 1 - ОКА; 1.1 - расстояние между ОКА и первой ЗС  ; 1.2 - расстояние между ОКА и ПРСТ
; 1.2 - расстояние между ОКА и ПРСТ  ; 2 - СКА; 2.1 - расстояние между СКА и первой ЗС
; 2 - СКА; 2.1 - расстояние между СКА и первой ЗС  ; 2.2 - расстояние между СКА и ПРСТ
; 2.2 - расстояние между СКА и ПРСТ  ; 3 - ПРСТ K; 4 - ИОРС H; 5 - линия горизонта; 6.1 - первая ЗС I1; 6.2 - вторая ЗС I2.
; 3 - ПРСТ K; 4 - ИОРС H; 5 - линия горизонта; 6.1 - первая ЗС I1; 6.2 - вторая ЗС I2.
Система определения координат ОКА  в момент времени t0 содержит: ПРТС K с известными координатами xK, yK, zK, ИОРС Н с известными координатами xH, yH, zH, СКА S2 с известными координатами x2, y2, z2 в момент времени t0, а также N≥2 выбранных ЗС In, n=1…N (см. фиг. 1) на позициях с известными координатами xIn, yIn, zIn, излучающие радиосигналы в направлениях на ОКА и СКА.
в момент времени t0 содержит: ПРТС K с известными координатами xK, yK, zK, ИОРС Н с известными координатами xH, yH, zH, СКА S2 с известными координатами x2, y2, z2 в момент времени t0, а также N≥2 выбранных ЗС In, n=1…N (см. фиг. 1) на позициях с известными координатами xIn, yIn, zIn, излучающие радиосигналы в направлениях на ОКА и СКА.
Для каждой n-й ЗС возможно ввести обозначения:  - расстояния между ОКА S1 и n-й ЗС In;
- расстояния между ОКА S1 и n-й ЗС In;  - расстояния между СКА S2 и n-й ЗС In.
- расстояния между СКА S2 и n-й ЗС In.
На фиг. 1 помимо ИОРС Н представлено две ЗС, как минимально необходимое количество ЗС для однозначного одномоментного определения ортогональных составляющих вектора скорости ОКА  по предлагаемому способу.
по предлагаемому способу.
Основополагающей предпосылкой настоящего изобретения является наличие помимо ОКА S1, через который организуется канал связи между земными станциями, СКА S2, который способен ретранслировать те же самые радиоизлучения что и ОКА, но с большим ослаблением и другой частотой переноса. Таким образом, возможно получение за счет корреляционной обработки радиосигналов значения временных задержек Δtn между радиосигналами принятыми от ОКА S1 и СКА S2, принятых радиосигналов после их ретрансляции ОКА S1 и СКА S2 соответственно для каждой из выбранных ЗС In. Кроме того, в настоящем изобретении используют значение временной задержки ΔtH между излученным ИОРС Н и принятым ПРТС K тестовым радиосигналом.
Для определения координат ОКА х1, у1, z1 в момент времени t0 используют значения временных задержек Δtn, обусловленные разностью длин  и
и  траекторий InS1K и InS2K [6] для каждой n-й ЗС, а также значение временной задержки ΔtH обусловленной длиной
траекторий InS1K и InS2K [6] для каждой n-й ЗС, а также значение временной задержки ΔtH обусловленной длиной  траектории HS1K.
траектории HS1K.
На основе измеренных временных задержек Δtn, ΔtH и вычисленных длин  траекторий InS2K рассчитывают длины
траекторий InS2K рассчитывают длины  траекторий InS1K, а также длину
траекторий InS1K, а также длину  траектории HS1K.
траектории HS1K.
Каждой из длин  траекторий InS1K ставят в соответствие поверхность положения (ПП) которая является поверхностью второго порядка - эллипсоидом вращения с фокусами, совпадающими с НРТС K и ЗС In соответственно. Длине
траекторий InS1K ставят в соответствие поверхность положения (ПП) которая является поверхностью второго порядка - эллипсоидом вращения с фокусами, совпадающими с НРТС K и ЗС In соответственно. Длине  траектории HS1K ставят в соответствие ПП которая является поверхностью второго порядка - эллипсоидом вращения с фокусами, совпадающими с НРТС K и ИОРС Н соответственно.
траектории HS1K ставят в соответствие ПП которая является поверхностью второго порядка - эллипсоидом вращения с фокусами, совпадающими с НРТС K и ИОРС Н соответственно.
Координаты точки пересечения не менее трех ПП соответствуют искомым координатам КА х1, у1, z1 в момент времени t0. Таким образом, для одномоментного и однозначного определения координат ОКА необходимо использование ИОРС и двух ЗС. Дальнейшее увеличение количества ЗС будет приводить к повышению точности определения координат ОКА.
В качестве примера в приложении Б представлен алгоритм определения координат ОКА х1, у1, z1 с использованием двух ЗС In и ИОРС Н. Выходными результатами представленного алгоритма выступают координаты ОКА х1, у1, z1 в момент времени t0.
На фиг. 3 в качестве примера представлена схема выбора ЗС, а также номинала частоты излучения тестового радиосигнала ИОРС ƒH с учетом диапазонов частот на линии “вверх” ОКА  и СКА
и СКА  , а также диапазонов частот ЗС F1…F12, расположенных в районах зон покрытия ОКА
, а также диапазонов частот ЗС F1…F12, расположенных в районах зон покрытия ОКА  и СКА
и СКА  . По оси абсцисс на фиг. 5 отложены частоты ƒ, по оси ординат - амплитуды А.
. По оси абсцисс на фиг. 5 отложены частоты ƒ, по оси ординат - амплитуды А.
Анализ схемы (фиг. 3) показывает, что в диапазон частот на линии “вверх” ОКА  входят диапазоны частот ЗС F1…F11, а в диапазон частот на линии “вверх” СКА
входят диапазоны частот ЗС F1…F11, а в диапазон частот на линии “вверх” СКА  входят диапазоны частот F5…F12 ЗС. Таким образом, одновременно в диапазоны частот на линии "вверх" ОКА и СКА , входят диапазоны частот ЗС F5…F11. На схеме (фиг. 5) введены обозначения указанных ЗС - I1…I7, а также значений номиналов их излучаемых частот - ƒ1…ƒ7.
входят диапазоны частот F5…F12 ЗС. Таким образом, одновременно в диапазоны частот на линии "вверх" ОКА и СКА , входят диапазоны частот ЗС F5…F11. На схеме (фиг. 5) введены обозначения указанных ЗС - I1…I7, а также значений номиналов их излучаемых частот - ƒ1…ƒ7.
На фиг. 4 цифрами обозначены: 1.3 - зона покрытия ОКА Ω1; 2.3 - зона покрытия ОКА Ω2; 4 - ИОРС H; 6.1 - первая ЗС I1; 6.2 - вторая ЗС I2; 6.3 -первая ЗС I3; 6.4 - вторая ЗС I4; 6.5 - первая ЗС I5; 6.6 - вторая ЗС I6; 6.7 - вторая ЗС I7.
На фиг. 4 в качестве примера представлена схема выбора ЗС с учетом зон покрытия ОКА Ω1 и СКА Ω2.
Анализ схемы (фиг. 4) показывает, что в зоне покрытия ОКА Ω1 находятся ЗС I1, I2, I4, I6 и ИОРС H, а в зоне покрытия СКА Ω2 находятся ЗС I1, I2, I3, I4, I7 и ИОРС H. Таким образом, одновременно в зонах покрытия ОКА Ω1 и СКА Ω2 находятся ЗС I1, I2, I4 и ИОРС H.
При выборе ЗС учитывают топологию размещения всех ЗС In и ИОРС H от которой зависит точность определения координат ОКА х1, у1, z1. Под топологией размещения ЗС In и ИОРС понимают их взаимное расположение на поверхности Земли. При этом в качестве важных показателей при выборе ЗС выступают взаимные расстояния  между n-й и m-й ЗС, где m=1…N, m≠n и расстояния
между n-й и m-й ЗС, где m=1…N, m≠n и расстояния  между n-й ЗС и ИОРС, которые должны быть максимальными.
между n-й ЗС и ИОРС, которые должны быть максимальными.
Сопоставляя фиг. 3 и фиг. 4 для определения ортогональных составляющих вектора скорости КА  выбирают ЗС I1 и I2. В качестве номинала частоты излучения тестового радиосигнала ИОРС ƒH выбрана средняя частота диапазона F12, поскольку, как видно на фиг. 4 ЗС I7, невозможно выбрать для реализации заявленного способа.
выбирают ЗС I1 и I2. В качестве номинала частоты излучения тестового радиосигнала ИОРС ƒH выбрана средняя частота диапазона F12, поскольку, как видно на фиг. 4 ЗС I7, невозможно выбрать для реализации заявленного способа.
На фиг. 5 цифрами обозначены: 4 - ИОРС H; 5 - линия горизонта; 6.1 - первая ЗС I1; 6.2 - вторая ЗС I2; 7.1 - расстояние между ИОРС и первой ЗС  ; 7.2 - расстояние между ИОРС и второй ЗС
; 7.2 - расстояние между ИОРС и второй ЗС  ; 7.3 - расстояние между первой и второй ЗС
; 7.3 - расстояние между первой и второй ЗС  .
.
На фиг. 5 в качестве примера представлена схемы топологии размещения двух ЗС I1, I2 и ИОРС H. Указанные ЗС выбирались так, что бы взаимные расстояния  были максимальными.
были максимальными.
Имитационное моделирование на основе программ для ЭВМ [7, 8] заявленных способов показало возможность повышения точности определения координат КА х1, у1, z1. по сравнению со способом прототипом на 10…15%.
Источники информации
1. Агиевич С.Н., Беспалов В.Л., Дедовская Э.Г., Матюхин А.С., Подъячев П.А., Севидов В.В. Способ определения параметров орбиты искусственного спутника Земли с использованием приемных опорных реперных станций. Патент №2702098 МПК G01S 5/00 (2006.01). Бюл. №28 от 04.10.19. Заявка №2018127491 от 25.07.18.
2. Агиевич С.Н., Ватутин В.М., Матюхин А.С., Модин М.И., Севидов В.В. Способ определения параметров орбиты искусственного спутника Земли с использованием приемо-передающих опорных реперных станций. Патент №2708883. МПК G01S 5/00 (2006.01). Бюл. №35 от 12.12.19. Заявка №2018134855 от 01.10.18.
3. Агиевич С.Н., Андросов В.В., Калуцкий Р.П., Коновалов В.Е., Луценко С.А., Севидов В.В., Харченко В.Е. Способ определения ортогональных составляющих вектора скорости и способ определения координат космического аппарата с использованием земных станций. Патент на изобретение №2750753, опубл. 02.07.2021. Бюл. №19.
4. Машбиц Л.М. Компьютерная картография и зоны спутниковой связи, - 2-е изд., перераб и доп.- М.: Горячая линия - Телеком, 2009. - 236 с.
5. Волков Р.В., Малышев С.Р., Симонов А.Н., Севидов В.В. Определение канонических параметров спутников-ретрансляторов по радиосигналам опорных реперных станций // Труды Военно-космической академии им. А.Ф. Можайского. 2016. Вып. 655. С. 88-92.
6. Волков Р.В., Саяпин В.Н., Севидов В.В. Модель измерения временной задержки и частотного сдвига радиосигнала, принятого от спутника-ретранслятора при определении местоположения земной станции // T-Comm: Телекоммуникации и транспорт. 2016. Том 10. №9. С. 14-18.
7. Волков Р.В., Саяпин В.Н., Севидов В.В. Модель движения искусственного спутника Земли // Программы для ЭВМ. Базы данных. Топологии интегральных микросхем. 2016. №2. С. 112.
8. Севидов В.В. Определение координат и параметров движения источника радиоизлучения на основе разностно-временных и разностно-доплеровских измерений // Программы для ЭВМ. Базы данных. Топологии интегральных микросхем. 2015. №11. С. 2.
Приложение А
Алгоритм определения координат ОКА с использованием двух ЗС и ИОРС
Алгоритм определения координат ОКА х1, у1, z1 с использованием ЗС In, где n=1…N - номер ЗС, N≥2 размещенных на позициях с известными координатами  и ИОРС размещенной на позиции с известными координатами xH, yH, zH, основан на том, что каждой из временных задержек Δtn соответствует разности длин
и ИОРС размещенной на позиции с известными координатами xH, yH, zH, основан на том, что каждой из временных задержек Δtn соответствует разности длин  и
и  траекторий InS1K и InS2K, а временной задержке ΔtH соответствует длина
траекторий InS1K и InS2K, а временной задержке ΔtH соответствует длина  траектории HS1K.
траектории HS1K.
В качестве примера в настоящем приложении представлен вариант с двумя ЗС (n=1…2) и ИОРС как минимально необходимого состава для однозначного одномоментного определения координат ОКА х1, у1, z1 по заявляемому способу.
Длины  траекторий InS2K вычисляют по формулам:
траекторий InS2K вычисляют по формулам:

Используя длины  траекторий InS2K, а также измеренные временные задержки Δtn рассчитывают длины
траекторий InS2K, а также измеренные временные задержки Δtn рассчитывают длины  траекторий InS1K:
траекторий InS1K:

где с=3×108 м/с - скорость света в вакууме.
Длину  траектории HS1K вычисляют по формуле:
траектории HS1K вычисляют по формуле:

Каждой из длин  траекторий InS1K ставят в соответствие поверхность положения (ПП) основного КА S1, которая является поверхностью второго порядка - эллипсоидом вращения с фокусами, совпадающими с ПРТС K и ЗС In соответственно.
траекторий InS1K ставят в соответствие поверхность положения (ПП) основного КА S1, которая является поверхностью второго порядка - эллипсоидом вращения с фокусами, совпадающими с ПРТС K и ЗС In соответственно.
Длине  траектории HS1K ставят в соответствие ПП ОКА S1, которая является поверхностью второго порядка - эллипсоидом вращения с фокусами, совпадающими с ПРТС K и ИОРС Н соответственно.
траектории HS1K ставят в соответствие ПП ОКА S1, которая является поверхностью второго порядка - эллипсоидом вращения с фокусами, совпадающими с ПРТС K и ИОРС Н соответственно.
Координаты точки пересечения трех ПП соответствуют искомым координатам ОКА х1, у1, z1 в момент времени t0. Таким образом, для однозначного одномоментного определения координат ОКА х1, у1, z1 необходимо наличие не менее двух ЗС и ИОРС.
Для расчета координат КА х1, у1, z1 с использованием двух ЗС и ИОРС разработан алгоритм, схема которого представлена на фиг. 2.
На этапе 1 производят ввод исходных данных, в качестве которых выступают: момент времени измерения t0, координаты ПРТС xK, yK, zK, координаты СКА х2, y2, z2, координаты двух ЗС  ; координаты ИОРС xH, yH, zH; временные задержки между радиосигналами принятыми от ОКА и СКА для каждой из выбранных ЗС Δt1, и Δt2; временная задержка между излученным и принятым тестовым радиосигналом ИОРС после его ретрансляции основным КА ΔtH; порог точности δ0 расчета координат ОКА.
; координаты ИОРС xH, yH, zH; временные задержки между радиосигналами принятыми от ОКА и СКА для каждой из выбранных ЗС Δt1, и Δt2; временная задержка между излученным и принятым тестовым радиосигналом ИОРС после его ретрансляции основным КА ΔtH; порог точности δ0 расчета координат ОКА.
На этапе 2 рассчитывают длины  траекторий InS1K по формулам (А.1).
траекторий InS1K по формулам (А.1).
На этапе 3 рассчитывают длины  траекторий InS1K по формулам (А.2) и длину
траекторий InS1K по формулам (А.2) и длину  траектории HS1K по формуле (А.3).
траектории HS1K по формуле (А.3).
На этапе 4 выбирают, на основе элементов Кеплеровой орбиты ОКА, координаты опорной точки S'1(х'1, у'1, z'1), как первое приближение к координатам ОКА.
На этапе 5 рассчитывают длины  траекторий InS'1K, и длину
траекторий InS'1K, и длину  траекторий HS'1K при условии равенства координат ОКА координатам опорной точки S'1(х'1, у'1, z'1) по формулам:
траекторий HS'1K при условии равенства координат ОКА координатам опорной точки S'1(х'1, у'1, z'1) по формулам:
где  - расстояния от опорной точки S'1 до n-й ЗС In,
- расстояния от опорной точки S'1 до n-й ЗС In,  - расстояния от опорной точки S'1 до ИОРС Н,
- расстояния от опорной точки S'1 до ИОРС Н,  - расстояние от опорной точки S'1 до ПРТС K.
- расстояние от опорной точки S'1 до ПРТС K.
Расстояния  в свою очередь рассчитываются по формулам:
в свою очередь рассчитываются по формулам:
На этапе 6 рассчитывают невязки k1, k2, и k3 как разницы между определенными на этапе 5 длинами  и длинами
и длинами  , определенными на этапе 3 соответственно:
, определенными на этапе 3 соответственно:
На этапе 7 определяют поправки к координатам ОКА Δх1, Δу1, Δz1.
Для определения поправок к координатам ОКА Δх1, Δу1, Δz1 предварительно формируют систему линейных уравнений при разложении в ряд Тейлора функций  , с точностью до первых членов:
, с точностью до первых членов:
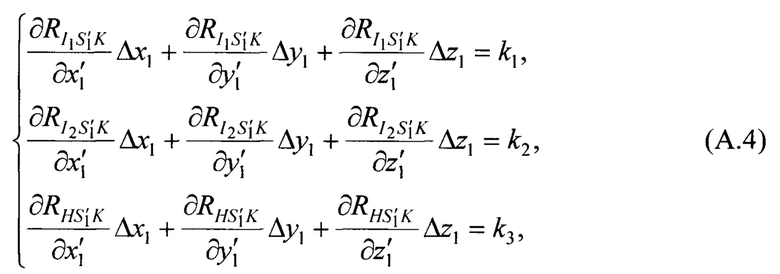
где частные производные рассчитываются согласно выражениям
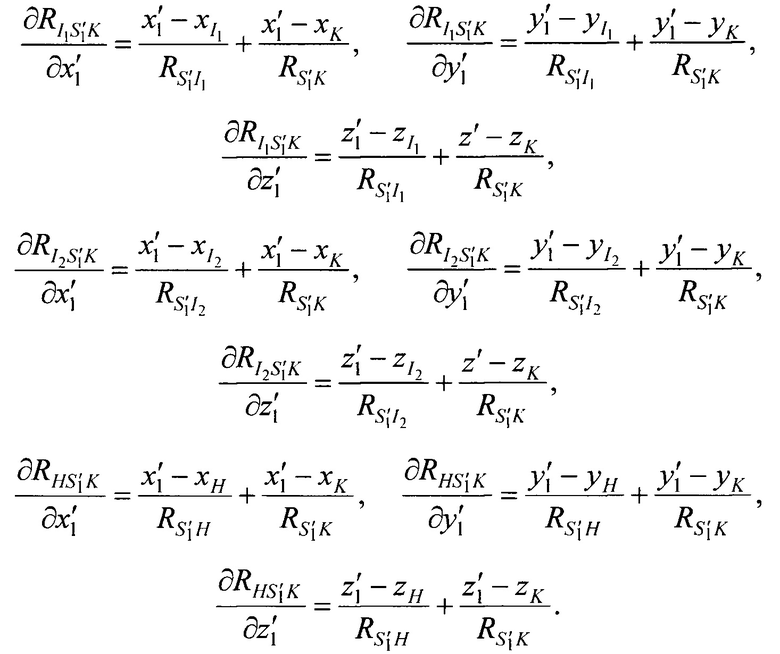
Решая систему линейных уравнений (А.4) одним из известных методов, например, методом Крамера, получают поправки к координатам ОКА Δх1, Δу1, Δz1.
На этапе 8 рассчитывают координаты новой опорной точки 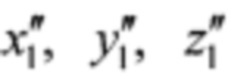 :
:
 .
.
Этапы 5-8 в совокупности составляют первую итерацию. Далее итерации повторяют, используя каждый раз новую опорную точку, полученную на предыдущей итерации. Количество необходимых итераций зависит требуемой точности определения координат ОКА. С точностью определения координат ОКА напрямую связан шаг итерации dш.
На этапе 9 определяют шаг итерации dш как расстояние между текущей и предыдущей опорными точками:

На этапе 10 сравнивают dш с порогом δ0, задаваемом на этапе 1.
Необходимое число итераций, как правило, составляет 2…4. В качестве координат ОКА х1, у1, z1 выбирают значения координат опорной точки на последней итерации, вывод которых осуществляют на этапе 11.
В общем случае, когда количество ЗС N>2, алгоритм определения координат ОКА остается прежним, с той лишь разницей, что система уравнений (А.4) будет содержать более трех уравнений. Тогда такую систему уравнений решают, например, методом наименьших квадратов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат космического аппарата с использованием земных станций и излучающей опорной реперной станции | 2023 |
|
RU2803662C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ И ИЗЛУЧАЮЩЕЙ ОПОРНОЙ РЕПЕРНОЙ СТАНЦИИ | 2022 |
|
RU2787890C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ И ИЗЛУЧАЮЩЕЙ ОПОРНОЙ РЕПЕРНОЙ СТАНЦИИ | 2023 |
|
RU2822687C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ВЕКТОРОВ СКОРОСТИ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ И ИЗЛУЧАЮЩЕЙ ОПОРНОЙ РЕПЕРНОЙ СТАНЦИИ | 2022 |
|
RU2791153C1 |
| Способ определения ортогональных составляющих вектора скорости космического аппарата с использованием земной станции и излучающей опорной реперной станции | 2023 |
|
RU2801257C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ И ИЗЛУЧАЮЩЕЙ ОПОРНОЙ РЕПЕРНОЙ СТАНЦИИ | 2021 |
|
RU2788518C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ВЕКТОРОВ СКОРОСТИ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ И ИЗЛУЧАЮЩЕЙ ОПОРНОЙ РЕПЕРНОЙ СТАНЦИИ | 2023 |
|
RU2822690C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ВЕКТОРОВ СКОРОСТЕЙ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ | 2020 |
|
RU2749878C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ | 2020 |
|
RU2750228C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ВЕКТОРОВ СКОРОСТЕЙ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ | 2020 |
|
RU2750983C1 |
Изобретение относится к области космонавтики, а именно к технике выполнения траекторных измерений, определения координат космического аппарата (КА), и может быть использовано на наземных и бортовых комплексах управления полетом КА для точного определения текущих параметров движения КА. Техническим результатом является повышение точности определения координат КА за счет выбора земных станций (ЗС) и установки излучающей опорной реперной станции (ИОРС) так, чтобы взаимные расстояния между ЗС, а также расстояния между ЗС и ИОРС были максимальными. Способ определения координат основного КА х1, у1, z1 включает измерение в приемной радиотехнической станции (ПРТС) за счет корреляционной обработки радиосигналов значения временной задержки ΔtH между излученным и принятым тестовым радиосигналом излучающей опорной реперной станции (ИОРС) после его ретрансляции основным КА, измерение в ПРТС за счет корреляционной обработки радиосигналов для каждой n-й земной станции (ЗС) значений временных задержек Δtn между принятыми радиосигналами после их ретрансляции основным и смежным КА соответственно, расчет координат основного КА х1, у1, z1 на основе указанных временных задержек радиосигналов системы. 2 з.п. ф-лы, 5 ил., 1 прил.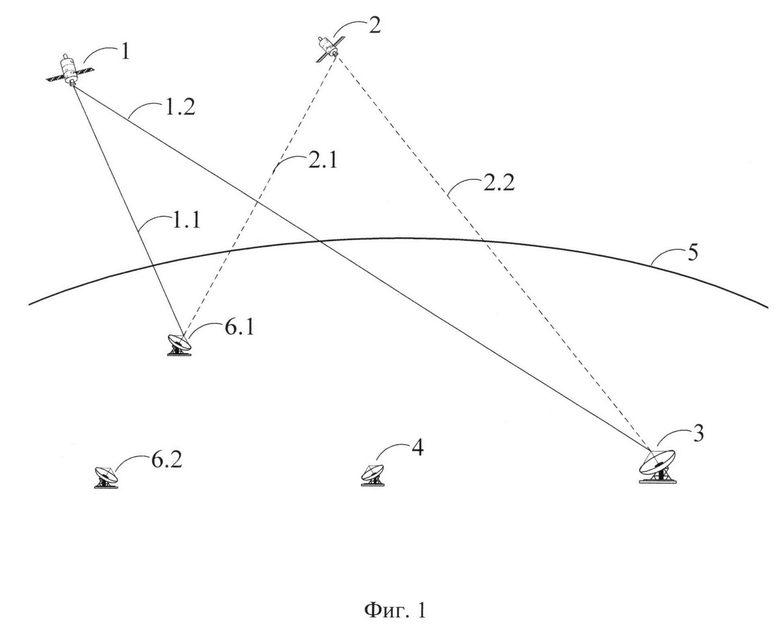
1. Способ определения координат космического аппарата с использованием земных станций (ЗС) и излучающей опорной реперной станции (ИОРС), заключающийся в том, что размещают приемную радиотехническую станцию (ПРТС) на позиции с известными координатами xK, yK, zK, выбирают начальные значения параметров орбиты основного космического аппарата (ОКА), координаты которого необходимо определить, выбирают смежный космический аппарат (СКА) с известными координатами х2, y2, z2, имеющий общий участок диапазона частот на линии "вверх" с ОКА и общую зоны покрытия с зоной покрытия ОКА, выбирают земные станции, значения номиналов излучаемых частот которых входят в диапазоны частот на линии “вверх” ОКА и СКА и каждая из ЗС находится в зонах покрытия ОКА и СКА, принимают в момент времени t0 с помощью ПРТС радиосигналы, переданные земными станциями и ретранслированные ОКА и СКА, на основе временных задержек радиосигналов системы вычисляют координаты ОКА х1, у1, z1 в момент времени t0, отличающийся тем, что дополнительно устанавливают на земной поверхности ИОРС на позиции с известными координатами xH, yH, zH, принадлежащими одновременно зонам покрытия ОКА и СКА в момент времени t0, излучают в момент времени t0 тестовый радиосигнал ИОРС со значением номинала частоты ƒH, принимают тестовый радиосигнал с помощью ПРТС после его ретрансляции ОКА, измеряют в ПРТС с использованием корреляционной обработки радиосигналов значение временной задержки ΔtH между излученным и принятым тестовым радиосигналом, рассчитывают длину траектории ИОРС-ОКА-ПРТС, используя значение временной задержки ΔtH, для каждой n-й ЗС с известными координатами xIn, yIn, zIn, где n=1…N - номер ЗС, N≥2, измеряют в ПРТС с использованием корреляционной обработки радиосигналов значения временной задержки Δtn, между принятыми радиосигналами после их ретрансляции ОКА и СКА соответственно, рассчитывают N значений длин траекторий ЗС-СКА-ПРТС на основе известных координат каждой из ЗС xIn, yIn, zIn, СКА х2, y2, z2 и ПРТС xK, yK, zK, определяют N значений длин траекторий ЗС-ОКА-ПРТС, для каждой ЗС, используя длины траекторий ЗС-СКА-ПРТС, а также измеренные временные задержки Δtn, вычисляют координаты ОКА х1, у1, z1 с использованием рассчитанных длин траекторий ЗС-ОКА-ПРТС, длины ИОРС-ОКА-ПРТС, известных координат ПРТС xK, yK, zK, ЗС xIn, yIn, zIn, и ИОРС xH, yH, zH.
2. Способ по п. 1, отличающийся тем, что выбирают земные станции и устанавливают ИОРС так, чтобы взаимные расстояния между n-й и m-й ЗС, где m=1…N, m≠n и расстояния между n-й ЗС и ИОРС были максимальными.
3. Способ по п. 1, отличающийся тем, что значение номинала излучаемой частоты ƒH тестового радиосигнала входит в диапазоны частот на линии "вверх" для ОКА и СКА.
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ | 2020 |
|
RU2750753C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ С ИСПОЛЬЗОВАНИЕМ ПРИЕМО-ПЕРЕДАЮЩИХ ОПОРНЫХ РЕПЕРНЫХ СТАНЦИЙ | 2018 |
|
RU2708883C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ С ИСПОЛЬЗОВАНИЕМ ПРИЕМНЫХ ОПОРНЫХ РЕПЕРНЫХ СТАНЦИЙ | 2018 |
|
RU2702098C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2020 |
|
RU2749456C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ И НАЗЕМНО-КОСМИЧЕСКАЯ СИСТЕМА ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПО СИГНАЛАМ РАДИОИЗЛУЧЕНИЯ ИХ БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ | 2015 |
|
RU2599984C1 |
| Способ определения местоположения земной станции спутниковой связи | 2017 |
|
RU2640395C1 |
| ВОЛКОВ Р.В., МАЛЫШЕВ С.Р., СИМОНОВ А.Н., СЕВИДОВ В.В | |||
| Определение канонических параметров спутников-ретрансляторов по радиосигналам опорных реперных станций // Труды Военно-космической | |||

