Область техники, к которой относится изобретение
Изобретение относится к области медицины, в частности к нейрофизиологии, и может быть использовано в неврологии, травматологии и ортопедии при реабилитации больных после заболеваний и/или травматических повреждений головного мозга и/или спинного мозга, следствием которых является нарушение функции ходьбы.
Предпосылки изобретения
Известны инвазивные способы стимуляции спинного мозга обезьян с плегией задней конечности (MarcoCapogrossoetal. A brain-spine interface alleviating gait deficits after spinal cord injury in primates. Nature, volume 539, pages 284-288 (2016)) и крыс с параплегией задних конечностей (Parag Gadetal. Forelimb EMG-based trigger to control an electronic spinal bridge to enable hindlimb stepping after a complete spinal cord lesion in rats. JournalofNeuroEngineeringandRehabilitation (2012)). У обезьян с односторонней перерезкой (гемисекцией) спинного мозга ритмическую электрическую стимуляцию двигательных ядер мышц-сгибателей и мышц-разгибателей задних конечностей запускали сигналами коры головного мозга, детектирующими фазы шагательного цикла.
На крысах с полностью перерезанным спинным мозгом в грудном отделе движения парализованных задних конечностей инициировали электрической стимуляцией поясничного отдела спинного мозга сигналами от мышц передних конечностей, передвигающихся по беговой дорожке (тредбану). При этом движения передних и задних конечностей крысы в результате стимуляции спинного мозга оказались некоординированы. В обоих случаях, решалась проблема передачи команды от вышележащих отделов нервной системы к нижележащим отделам в обход разделяющего эти места повреждения спинного мозга. Функция ходьбы осуществляется в процессе стимуляции спинного мозга ниже уровня поражения.
Оба описанных выше способа являются инвазивными способами стимуляции, связанными с проведением хирургической операции на головном и спинном мозге (MarcoCapogrossoetal.) или на спинном мозге и на мышцах передних конечностей животных (ParagGadetal.). Инвазивный способ стимуляции связан с необходимостью послеоперационного ухода, с риском воспалительных реакций и вероятностью отторжения имплантированных устройств. Более того, в обоих случаях ходьба реализуется только в процессе стимуляции спинного мозга, что свидетельствует о протезировании функции ходьбы, а не о восстановлении этой функции.
Известна неинвазивная магнитная стимуляция спинного мозга пациента, при которой параметры воздействия магнитного поля на спинной мозг на уровне локомоторных центров зависят от электрической активности мышц верхних конечностей (ритмические движения рук запускают ритмическую электромагнитную стимуляцию спинного мозга) (SyusakuSasadaetal. Volitional Walking via Upper Limb Muscle-Controlled Stimulation of the Lumbar Locomotor Center in Man. JournalofNeuroscience,13 August 2014, 34 (33)).
Магнитная стимуляция имеет меньшую точность (адресность) по сравнению с электрической стимуляцией. Магнитная катушка, которая генерирует магнитное поле для воздействия на спинной мозг, имеет значительную массу и сложную форму. Поэтому для ее фиксации рядом со спинным мозгом необходимо либо дополнительное фиксирующее устройство, либо ассистент, который держит эту катушку. Поэтому магнитная стимуляция не может обеспечивать самостоятельную ходьбу пациента по ровной поверхности. Также, по сравнению с электрической стимуляцией, при магнитной стимуляции спинного мозга на протяжении даже короткого времени локомоторной активности (время локомоторной активности совпадает с длительностью работы магнитного стимулятор) используется большая мощность сигнала, требующая аккумуляторов гигантской емкости.
Наиболее близким аналогом предлагаемого изобретения является электрическая эпидуральная стимуляция спинного мозга, которая позволяет контролировать ходьбу у людей, которые перенесли травму спинного мозга более четырех лет назад и имеют постоянный двигательный дефицит или полный паралич, несмотря на интенсивную реабилитацию (Fabien В. Wagner et al. Targeted neurotechnology restores walking in humans with spinal cord injury. Nature, volume 563, pages 65-71 (2018)). Стимуляцию спинного мозга осуществляли с помощью имплантированного генератора импульсов с возможностью запуска стимуляции в режиме реального времени и матрицы электродов, помещенной на заднюю поверхность спинного мозга в области поясничного утолщения. В режиме реального времени обрабатывали информацию о кинематике ходьбы пациентов, в том числе снимали показатели электрической активности мышц ног (электромиография, ЭМГ).
Для активации двигательных ядер мышц-сгибателей и мышц-разгибателей в необходимые для ходьбы промежутки времени осуществляли пространственно-временную избирательную стимуляцию задних корешков спинного мозга, синхронизированную с определенной фазой (опора, или перенос конечности) шагательного цикла. Характеристики ходьбы улучшились в процессе реабилитации. Через несколько месяцев пациенты с неполным поражением спинного мозга восстановили произвольный контроль над ранее парализованными мышцами без стимуляции; пациенты смогли ходить или ездить на велосипеде вне помещения лаборатории при осуществлении стимуляции спинного мозга.
Применение такой стимуляции ограничено числом пациентов, которым не противопоказана нейрохирургическая операция по имплантации эпидуральныхэлектродов. Любая хирургическая операция связана с рисками самой операции, с рисками послеоперационных осложнений, с риском отторжения имплантируемых устройств, с необходимостью послеоперационного ухода, длительность которого зависит от большого числа факторов. Более того, вышеописанная стимуляция не решает проблемы передачи команды на запуск и контроль ходьбы от вышележащих отделов нервной системы нижележащим отделам в обход разделяющего эти места повреждения спинного мозга. Вследствие невозможности контроля вызванной стимуляцией ходьбы вышележащими отделами нервной системы эта ходьба является «механической», не адаптирующейся к условиям окружающей среды.
Раскрытие сущности изобретения
Целью настоящего изобретения является улучшение неврологического восстановления двигательной активности и улучшение качества жизни пациентов с заболеваниями и травматическими повреждениями головного мозга и/или спинного мозга, следствием которых является нарушение функции ходьбы; а также повышение эффективности и сокращение сроков реабилитации, обеспечение возможности независимой (самостоятельной) ходьбы пациентов вне условий стационара.
Техническим результатом, достигаемым при осуществлении изобретения, является разработка способа неинвазивной (не требующей оперативного вмешательства) пространственно-временной электрической стимуляции спинного мозга:
- который позволяет использовать естественные синергии движений верхних и нижних конечностей для реализации функции ходьбы у пациентов с нарушениями этой функции;
- в котором реализована передача команды на запуск спинальной стимуляции, инициирующей ходьбу, от движений вышележащих частей тела (рук, головы, туловища) и контроль вызванной электрической стимуляцией ходьбы от вышележащих отделов нервной системы нижележащим отделам);
- в котором реализована возможность одновременной стимуляции спинного мозга в нескольких разных отделах по различным выбранным алгоритмам, что позволяет использовать одновременную стимуляцию различных отделов спинного мозга (например, в области шейного утолщения - для обеспечения увеличения активности рук; в области поясничного утолщения - для увеличения его возбудимости);
- который позволяет облегчить произвольную ходьбу, а также восстановить и обеспечить самостоятельное передвижение пациентов с нарушениями функции ходьбы, вызванными заболеваниями и/или травматическими повреждениями головного мозга и/или спинного мозга, и позволяет восстановить двигательные функции верхних и нижних конечностей пациентов.
Еще одним техническим результатом, достигаемым при осуществлении изобретения, является разработка устройства для осуществления вышеуказанного способа.
Технический результат изобретения достигается за счет того, что способ облегчения произвольной ходьбы у пациентов с травматическими повреждениями и/или заболеваниями спинного и/или головного мозга с использованием чрескожной электрической стимуляции спинного мозга включает одновременную непрерывную стимуляцию спинного мозга по меньшей мере на уровне позвонков Т11-Т12 и пространственно-временную и пространственно-избирательную стимуляцию корешков спинного мозга на уровне позвонков Т11 и L1.
При этом запуск и прекращение чрескожной электрической стимуляции спинного мозга осуществляется за счет внешнего управления.
В некоторых вариантах осуществления изобретения в качестве внешнего управления может быть выбрано одно из: движение по меньшей мере одной непораженной верхней или нижней конечностью, движение головы, подъем плеча, движение туловища, - осуществляемое для взаимодействия со средством запуска или прекращения стимуляции.
Причем включение пространственно-временной и пространственно-избирательной стимуляции корешков спинного мозга на уровне позвонков Т11 и L1 осуществляют за счет движения непораженной верхней или нижней конечности.
Интенсивность тока при чрескожной электрической стимуляции подбирается индивидуально в зависимости от возбудимости и порога двигательного ответа и болевой чувствительности пациента.
В некоторых вариантах изобретения для чрескожной электрической стимуляции спинного мозга используют монополярные прямоугольные импульсы или биполярные прямоугольные импульсы с частотой модуляции в диапазоне от 5 кГц до 10 кГц, при этом частоту стимуляции для непрерывной стимуляции спинного мозга по меньшей мере на уровне позвонков Т11-Т12 выбирают в диапазоне от 30 Гц до 45 Гц, частоту стимуляции для стимуляции корешков спинного мозга на уровне позвонка L1 выбирают в диапазоне от 10 Гц до 30 Гц, частоту стимуляции для стимуляции корешков спинного мозга на уровне позвонка Т11 выбирают в диапазоне от 30 Гц до 50 Гц. Индифферентные электроды (аноды) располагаются на коже над гребнями подвздошных костей или на животе. При стимуляции шейного отдела спинного мозга аноды располагаются симметрично в области левой и правой ключицы, или на гребнях подвздошных костей.
В частных вариантах реализации изобретения стимулирующие воздействия осуществляются у пациентов с гемипарезом. При этом пациент во время непрерывной стимуляции спинного мозга и пространственно-временной и пространственно-избирательной стимуляции корешков спинного мозга осуществляет ходьбу по неподвижной или движущейся поверхности с опорой непораженной верхней конечности на неподвижную опору или с частичной компенсацией веса тела с помощью подвесной системы.
В частных вариантах осуществления изобретения способ включает следующие этапы: 1) запуск и включение непрерывной стимуляции по меньшей мере на уровне позвонков Т11-Т12 и запуск пространственно-временной и пространственно-избирательной стимуляции корешков спинного мозга на уровне позвонков Т11 и L1 за счет внешнего управления, инициирующего начало стимуляции;
2) включение стимуляции корешков спинного мозга на стороне поражения на уровне позвонка L1 в момент отрыва непораженной нижней конечности от поверхности и переноса ее вперед;
3) выключение стимуляции корешков спинного мозга на стороне поражения на уровне позвонка L1 с одновременным включением стимуляции корешков спинного мозга на стороне поражения на уровне позвонка Т11 в момент постановки непораженной нижней конечности на поверхность;
4) стимуляция корешков спинного мозга на стороне поражения на уровне позвонка Т11, когда паретичная нижняя конечность отрывается от поверхности и переносится вперед;
5) выключение стимуляции корешков спинного мозга на стороне поражения на уровне позвонка Т11 в момент постановки паретичной нижней конечности на поверхность;
6) повторение этапов 2)-5) произвольное количество раз;
7) прекращение и выключение непрерывной стимуляции спинного мозга по меньшей мере на уровне позвонков Т11-Т12 и прекращение пространственно-временной и пространственно-избирательной стимуляции корешков спинного мозга на уровне позвонков Т11 и L1 за счет внешнего управления, прекращающего стимуляцию.
Причем при осуществлении описанных выше этапов способа непрерывную стимуляцию спинного мозга могут дополнительно осуществлять на уровне позвонков С5-С6.
В частных вариантах осуществления изобретения, когда у пациента наблюдается гемипарез, пациент во время непрерывной стимуляции спинного мозга и пространственно-временной и пространственно-избирательной стимуляции корешков спинного мозга осуществляет ходьбу по неподвижной или подвижной поверхности со средством опоры, на которую опирается непораженная верхняя конечность пациента.
В некоторых вариантах осуществления изобретения средство опоры выбрано из: палка, трость, костыль.
В некоторых вариантах осуществления изобретения пациент осуществляет ходьбу с использованием подвесной системы.
В частных вариантах осуществления изобретения способ включает следующие этапы: 1) запуск и включение непрерывной стимуляции по меньшей мере на уровне позвонков Т11-Т12, запуск пространственно-временной и пространственно-избирательной стимуляции корешков спинного мозга на уровне позвонков Т11 и L1 за счет внешнего управления, инициирующего начало стимуляции;
2) включение стимуляции корешков спинного мозга на стороне поражения на уровне позвонка L1 в момент отрыва непораженной нижней конечности от поверхности и переноса ее вперед;
3) выключение стимуляции корешков спинного мозга на стороне поражения на уровне позвонка L1 в момент постановки непораженной нижней конечности на поверхность;
4) включение стимуляции корешков спинного мозга на стороне поражения на уровне позвонка Т11 в момент отрыва средства опоры от поверхности и пронос средства опоры за счет движения непораженной верхней конечности вперед, постановка средства опоры на поверхность;
5) стимуляция корешков спинного мозга на стороне поражения на уровне позвонка Т11, когда паретичная нижняя конечность отрывается от поверхности и переносится вперед;
6) выключение стимуляции корешков спинного мозга на стороне поражения на уровне позвонка Т11 в момент постановки паретичной нижней конечности на поверхность,
7) повторение этапов 2)-6) произвольное количество раз;
8) прекращение и выключение непрерывной стимуляции спинного мозга на уровне позвонков Т11-Т12 и на уровне позвонков С5-С6 и прекращение пространственно-временной и пространственно-избирательной стимуляции корешков спинного мозга на уровне позвонков Т11 и L1 происходит за счет внешнего управления, прекращающего стимуляцию.
Причем непрерывную стимуляцию спинного мозга могут дополнительно осуществлять на уровне позвонков С5-С6. В этом варианте осуществления изобретения сначала осуществляют запуск и включение непрерывной стимуляции на уровне позвонков Т11-Т12, и затем на уровне позвонков С5-С6. При этом чрескожную электрическую стимуляцию осуществляют с использованием многоканального стимулятора.
В некоторых вариантах осуществления изобретения используется по меньшей мере одно средство регистрации для обнаружения:
- соприкосновения с поверхностью нижней конечности или средства опоры, на которую опирается непораженная верхняя конечность;
- отрыва от поверхности нижней конечности или средства опоры, на которую опирается непораженная верхняя конечность,
причем по меньшей мере одно средство регистрации выполнено с возможностью передачи управляющего сигнала на стимулятор при обнаружении указанных выше событий.
В некоторых вариантах осуществления изобретения стимулятор содержит по меньшей мере одно устройство хранения данных и одну или более программ, загружаемых по крайней мере в одно вышеупомянутое устройство хранения данных, при этом одна или более программ содержит инструкции для: запуска и прекращения стимуляции в зависимости от получаемого управляющего сигнала от средства запуска или прекращения стимуляции при осуществлении внешнего управления; включения и выключения непрерывной стимуляции путем регулирования подачи электрического тока на соответствующие электроды в зависимости от получаемого управляющего сигнала от средства запуска или прекращения стимуляции при осуществлении внешнего управления; включения и выключения пространственно-временной и пространственно-избирательной стимуляции корешков спинного мозга путем регулирования подачи электрического тока на соответствующие электроды в зависимости от получаемого управляющего сигнала по меньшей мере от одного средства регистрации обнаружения соприкосновения и/или отрыва непораженной и/или паретичной нижней конечности и/или средства опоры, на которую опирается непораженная верхняя конечность.
Технический результат также достигается за счет того, что спинальный нейропротез для облегчения произвольной ходьбы у пациентов с травматическими повреждениями и/или заболеваниями спинного или головного мозга включает многоканальный стимулятор для чрескожной электрической стимуляции спинного мозга, который включает по меньшей мере одно устройство хранения данных и одну или более программ, загружаемых по крайней мере в одно устройство хранения данных, при этом одна или более программ содержит инструкции для выполнения вышеописанных вариантов осуществления способа, электроды, подключаемые к указанному стимулятору, по меньшей мере одно средство регистрации для обнаружения соприкосновения и/или отрыва непораженной и/или паретичной нижней конечности и/или средства опоры, на которую опирается непораженная верхняя конечность от поверхности при осуществлении ходьбы, средство запуска или прекращения стимуляции.
Кроме того, по меньшей мере одно средство регистрации выбрано из: датчик контакта с поверхностью, датчик контакта средства опоры с поверхностью.
Кроме того, средство запуска или прекращения стимуляции выполнено в виде электромеханического переключателя или радиочастотного переключателя.
Кроме того, спинальный нейропротез дополнительно включает датчик ускорения и/или датчик угловой скорости и/или датчик изменения угла в суставе.
Краткое описание чертежей
Признаки изобретения станут более очевидными на основе последующего подробного описания, в котором сделана ссылка на прилагаемые чертежи, на которых представлена:
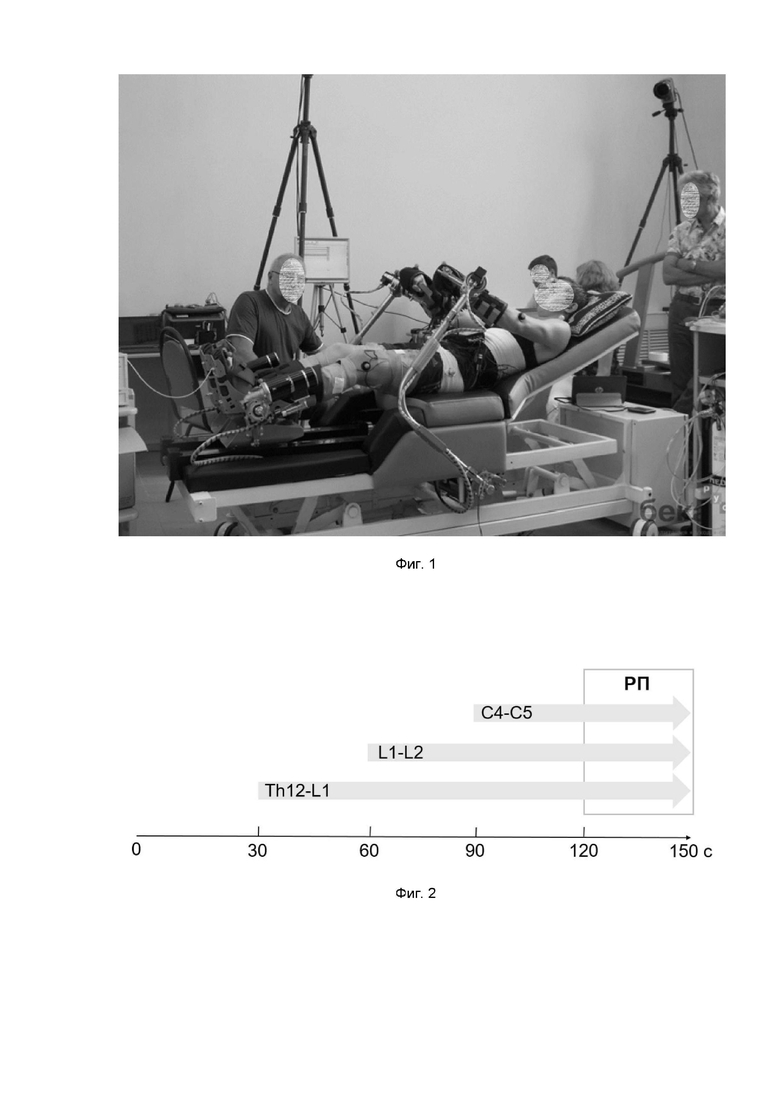
На фиг. 1 изображено положение испытуемого в биомеханическом тренажере для нейрореабилитации двигательных и висцеральных функций Биокин-ЭС ® во время исследования того, как произвольные движения рук влияют на характеристики непроизвольных движений ног, вызванных электрической чрескожной стимуляцией спинного мозга (ЧССМ).
На фиг. 2 изображена схема проведения исследования того, как произвольные движения рук влияют на характеристики непроизвольных движений ног, вызванных ЧССМ. На временной шкале 0 соответствует началу регистрации движений. T12-L1, L1-L2, С4-С5 - моменты начала ЧССМ на каждом из указанных уровней. РП - произвольные движения рук.
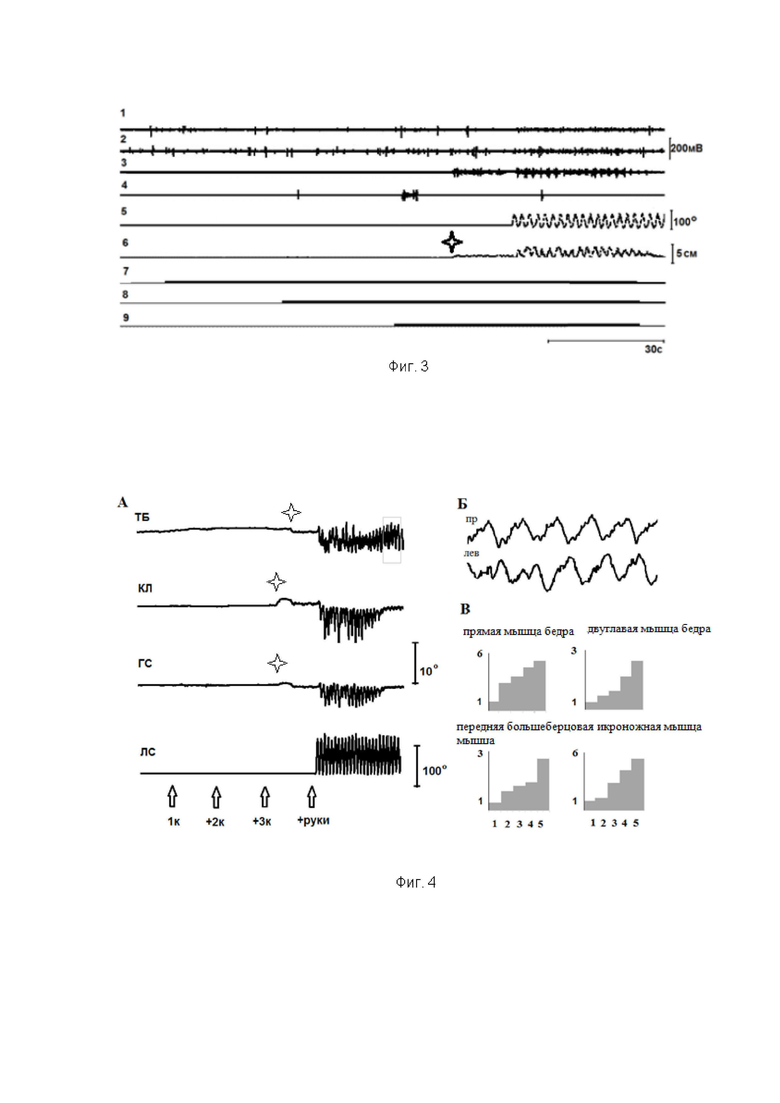
На фиг. 3 показаны оригинальные записи результатов исследования того, как движения рук влияют на характеристики непроизвольных движений ног, вызванных ЧССМ, полученные с испытуемым Б.А. 1-4 - ЭМГ мышц правой ноги: передняя большеберцовая мышца (1) (лат.m. tibialisanterior), икроножная мышца (2) (лат. m. gastrocnemius), двуглавая мышца бедра (3) (лат. m. bicepsfemoris) и прямая мышца бедра (4) (лат. m. rectusfemoris). 5 - изменения угла в правом локтевом суставе. 6 - изменения положения большого пальца правой ноги. 7, 8 и 9 - отметки активности каналов стимуляции на уровне позвонков T12-L1, L1-L2 и С5, соответственно. Звездочка над линией 6 указывает на инициацию движений правой ноги.
На фиг. 4 показаны оригинальные записи и результаты анализа влияния движений рук на характеристики движений, вызванных ЧССМ. А. - изменения углов в правых тазобедренном (ТБ), коленном (КП), голеностопном (ГС) и локтевом (ЛС) суставах при включении ЧССМ в области позвонков T12-L1 (1к), L1-L2 (2к) и С4-С5 (3к), а также при произвольных движениях рук; звездочки показывают на инициацию движений в суставах испытуемый Б.А. Б. - реципрокность движений в тазобедренных суставах правой и левой ног, соответствует временному интервалу, выделенному квадратиком в части А. В. - изменения интегральной характеристики ЭМГ активности мышц ног; по оси абсцисс -последовательность режимов: 1 - состояние покоя, 2, 3, 4 - подключение ЧЭССМ по 1-ому (в области позвонков T12-L1), 2-ому (L1-L2) и 3-ему (С4-С5) каналам, соответственно, 5 - выполнение произвольных движений рук. По оси ординат - интегральные характеристики ЭМГ за 30 с, отнесенные к их значению в состоянии покоя, средние значения для всех испытуемых, относительные величины.
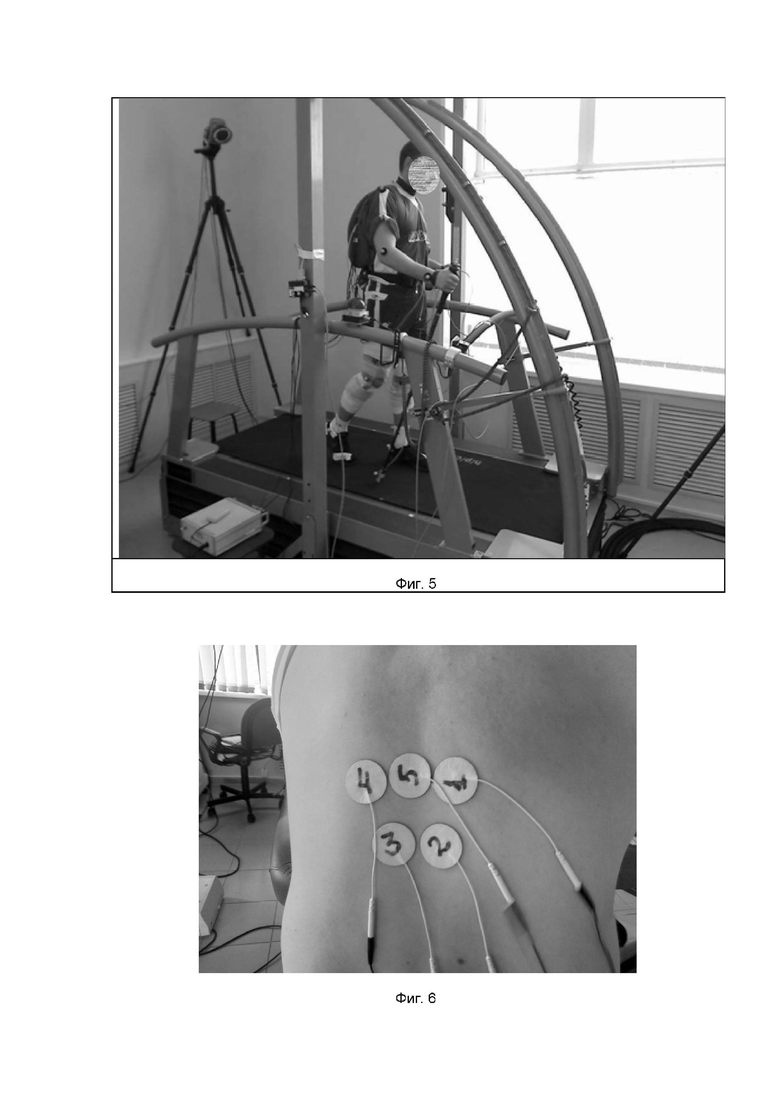
На фиг. 5 показано положение испытуемого во время исследования того, как периодическая ЧССМ, прилагаемая к разным корешкам спинного мозга в разные фазы шага (пространственно-временная ЧССМ), модулирует характеристики шаговых движений человека.
На фиг. 6 показано расположение катодов в проекции спинного мозга и корешков спинного мозга во время исследований влияния пространственно-временной электрической чрескожной стимуляции спинного мозга на характеристики шаговых движений человека. Номера на электродах соответствуют каналам стимуляции во время исследования.
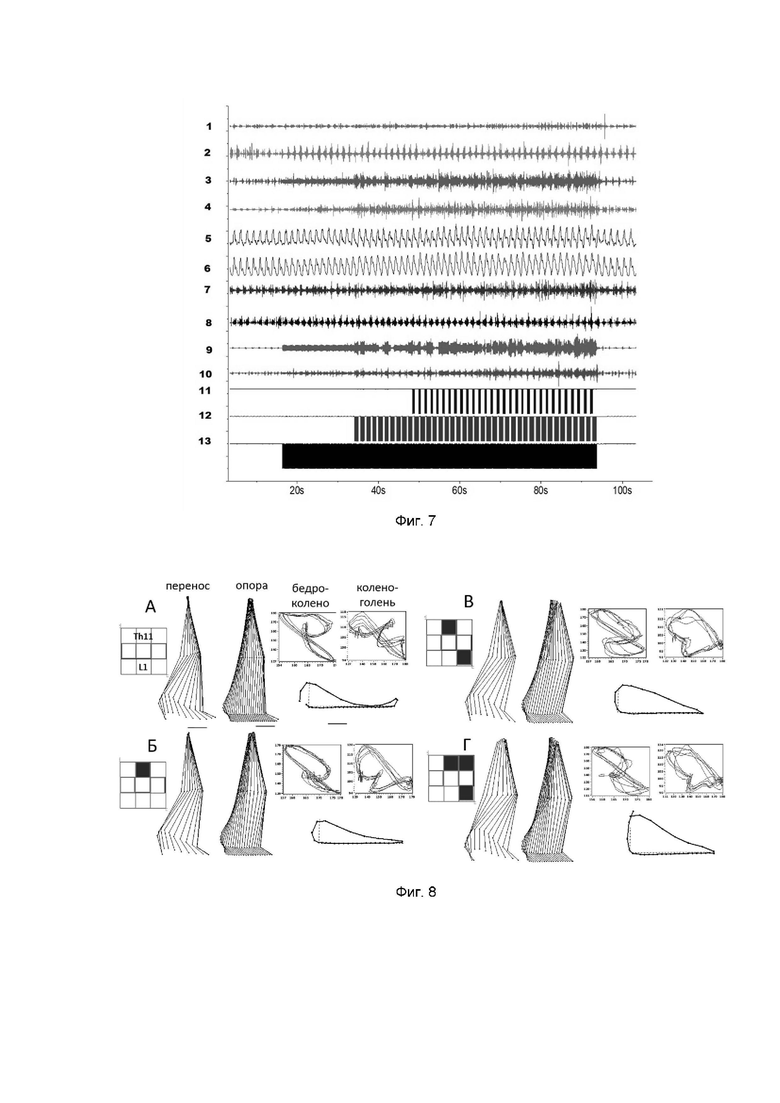
На фиг. 7 представлено изменение электрической активности мышц ног и углов в коленном суставе во время ходьбы испытуемого Д.Г. по беговой дорожке со скоростью 2 км/ч и периодической стимуляцией корешков спинного мозга в соответствии с протоколом исследования. Линии 1-4 - ЭМГ мышц справа: передняя большеберцовая мышца (1) (лат. m. tibialis), икроножная мышца (2) (лат. m. gastrocnemius), двуглавая мышца бедра (3) (лат. m. rectuslat), прямая мышца бедра (4) (лат. m. biceps). Линии 5 и 6 - показания двухосевого гониометра, зафиксированного на правом колене. Линии 7-10 - ЭМГмышцслева: передняя большеберцовая мышца (7) (лат. m. tibialis), икроножная мышца (8) (лат. m. gastrocnemius), двуглавая мышца бедра (9) (лат. m. rectuslat.), прямая мышца бедра (10) (лат. m. biceps). Линии 11, 12 и 13 - отметки стимуляции на электродах 1, 2 и 5 по фиг. 6, соответственно.
На фиг. 8 показаны траектории движений ног при ходьбе по беговой дорожке без стимуляции и с непрерывной и периодической ЧССМ на разных уровнях. А - ходьба по беговой дорожке без ЧССМ. Б - ходьба по беговой дорожке на фоне непрерывной стимуляции на уровне позвонка Т11. В - ходьба по беговой дорожке на фоне непрерывной стимуляции на уровне позвонка Т11, периодической стимуляции правого корешка L1. Г - ходьба по беговой дорожке на фоне непрерывной стимуляции на уровне позвонка Т11, периодической стимуляции правых корешков L1 и Т11. В пределах каждой части рисунка правее схемы расположения активных катодов представлена стик-диаграмма, реконструирующая фазы опоры и переноса, еще правее показаны координация углов в бедренном и коленных суставах и в коленном суставе и в голеностопе, под ними - траектория движения большого пальца ноги в сагиттальной плоскости; в траекторию вписан пунктирный прямой угол, в котором горизонтальная линия равна длине траектории большого пальца во время фазы опоры при ходьбе без ЧССМ, а вертикальная линия - максимальный подъем большого пальца при ходьбе без ЧССМ.
Термины и определения
Определения некоторых терминов, используемых в данном описании, приведены ниже. Если не определено отдельно, технические и научные термины в данной заявке имеют стандартные значения, общепринятые в научной и технической литературе.
В настоящем описании и в формуле изобретения термины «включает», «включающий» и «включает в себя», «имеющий», «снабженный», «содержащий» и другие их грамматические формы не предназначены для истолкования в исключительном смысле, а, напротив, используются в неисключительном смысле (т.е. в смысле «имеющий в своем составе»). В качестве исчерпывающего перечня следует рассматривать только выражения типа «состоящий из».
Под «регуляцией ходьбы», «контролем ходьбы» понимается управление характеристиками ходьбы в целом (скорость, амплитуда шага, длительность), и ее составляющими, например, фазами шагательного цикла (перенос, опора).
Под «облегчением ходьбы» понимается частный случай регуляции ходьбы, когда управление характеристиками ходьбы приводит к улучшению координации, увеличению устойчивости походки и скорости ходьбы.
Термин «стимуляция» относится к электрическому воздействию переменным током, при этом под «непрерывной стимуляцией» понимается стимуляция, начало и конец которой не зависят от ритмических движений неповрежденных (не затронутых патологическим процессом, ставшим причиной гемиплегии) рук и ног; под «прерывистой (ритмической) стимуляций» понимается стимуляция, начало и конец которой синхронизированы с ритмическими движениями неповрежденных рук и ног, при этом под «пространственно-избирательной стимуляцией» понимается прерывистая (ритмическая) стимуляция, при которой уровень стимуляции и латерализация (справа или слева) стимуляции зависят от фазы движений неповрежденных рук и ног, под «пространственно-временной стимуляцией» подразумевают пространственно-избирательную стимуляцию, при которой начало и конец этой стимуляции зависит от фазы движений неповрежденных рук и ног.
Под «синергиями», «двигательными синергиями», «синергиями движений» понимается согласованное координированное сокращение и расслабление мышц рук и ног при осуществлении шагательных движений. Доказанным является то, что управление движением человека и животных реализуется не как управление отдельными мышцами, а как управление синергиями движений (Александров и др. Устойчивое управление позой и движениями стоящего гуманоида по принципу естественных синергий у человека. Российский журнал биомеханики. 2013. Т. 17, №1 (59): 94-109).
Под «активацией двигательных синергий» понимают согласованное координированное сокращение и расслабление групп мышц ног при выполнении движений руками и другими подвижными частями тела. Преимущество активации синергий - облегчение вызванных чрескожной стимуляцией спинного мозга (ЧССМ) движений, активация врожденных механизмов управления движениями.
Примерами заболеваний головного мозга и/или спинного мозга, следствием которых является нарушение функции ходьбы являются инсульт головного или спинного мозга, дегенеративные и воспалительные заболевания головного или спинного мозга, ятрогенные заболевания.
Примерами повреждений головного мозга и/или спинного мозга являются сотрясение головного мозга, сдавление головного мозга, ушиб головного мозга, кровоизлияние головного мозга вследствие удара по голове, сотрясение спинного мозга, ушиб спинного мозга, сдавление спинного мозга, анатомический разрыв спинного мозга, гематомиелия спинного мозга, гематораксис спинного мозга, повреждение магистрального сосуда спинного мозга, повреждения корешков спинномозговых нервов.
Кроме того, термины «первый», «второй», «третий» и т.д. используются просто как условные маркеры, не накладывая каких-либо численных или иных ограничений на перечисляемые объекты.
Термин «соединенный» означает функционально соединенный, при этом может быть использовано любое количество или комбинация промежуточных элементов между соединяемыми компонентами (включая отсутствие промежуточных элементов).
Подробное описание изобретения
Ходьба вовлекает координированные движения всех четырех конечностей. При этом нейронные сети, управляющие движениями верхних конечностей, тесно взаимодействуют с нейронными сетями, управляющими локомоторными синергиями нижних конечностей (Zehr Е.Р., Duysens J. Regulationofarmandlegmovementduringhumanlocomotion // Neuroscientist. 2004. V. 10. №4. P. 347; Селионов В.А. и др. МЕЖКОНЕЧНОСТНЫЕ ВЗАИМОВЛИЯНИЯ ПРИ ЦИКЛИЧЕСКИХ СИНФАЗНЫХ И ПРОТИВОФАЗНЫХ ДВИЖЕНИЯХ РУК И НОГ И ИХ ЗАВИСИМОСТЬ ОТ АФФЕРЕНТНЫХ ВОЗДЕЙСТВИЙ // Физиология человека. - 2014. - Т. 40. - №. 4. - С. 65-65.).
Несмотря на то, что для человека, в отличие от большинства других млекопитающих, характерна двуногая ходьба, движения рук оказывают модулирующее влияние на движения ног во время ходьбы. Когда испытуемых, идущих по беговой дорожке, просили совершать движения руками в ритме шагания, достоверно менялись параметры рефлексов мышц ног, регистрируемые в этих условиях. На значения измеряемых характеристик этих рефлексов оказывали влияние фазы и скорости движений рук, а также другие характеристики движений рук (Zehr ЕР, Chua R. 2000. Modulation of human cutaneous reflexes during rhythmic cyclical arm movement. Exp Brain Res 135:241-50; Zehr ЕР, Kido A. 2001. Neural control of rhythmic, cyclical human arm movement: task dependency, nerve specificity and phase modulation of cutaneous reflexes. J Physiol (Lond) 537:1033-45; Zehr EP, Collins DF, Frigon A, Hoogenboom N. 2003. Neural control of rhythmic human arm movement: phase dependence and task modulation of Hoffmann reflexes in forearm muscles. J Neurophysiol 89:12-21.).
В исследованиях на здоровых добровольцах показано, что движения руками во время ходьбы по беговой дорожке со скоростями 1-7 км/ч увеличивали устойчивость, но только в том случае, если правая и левая руки интенсивно двигались в противофазе с одноименными ногами, и не влияли на устойчивость, если не двигались во время ходьбы или двигались синфазно с одноименными ногами (Punt М. et al. Effect of arm swing strategy on local dynamic stability of human gait //Gait & posture. - 2015. - T. 41. - №. 2. - C. 504-509).
Также бы проведены исследования, в результате которых было доказано, что пространственная организация движений конечностей человека является существенным фактором, определяющим активность мышц (Селионов В. А. и др. МЕЖКОНЕЧНОСТНЫЕ ВЗАИМОВЛИЯНИЯ ПРИ ЦИКЛИЧЕСКИХ СИНФАЗНЫХ И ПРОТИВОФАЗНЫХ ДВИЖЕНИЯХ РУК И НОГ И ИХ ЗАВИСИМОСТЬ ОТ АФФЕРЕНТНЫХ ВОЗДЕЙСТВИЙ // Физиология человека. - 2014. - Т. 40. - №. 4. - С. 65-65). У 10 здоровых испытуемых в положении лежа регистрировали активность мышц верхних и нижних конечностей при совершении раздельных и совместных циклических движений рук и ног с различными фазовыми соотношениями между движениями конечностей. Противофазные активные движения рук характеризовались большей активностью мышц, чем синфазные. Во время двигательной задачи, реализующей совместные противофазные движения как верхних, так и нижних конечностей, по сравнению с двигательной задачей, реализующей их совместные синфазные движения, наблюдалось существенное увеличение активности в двуглавой мышце плеча, передней болыиеберцовой мышце и двуглавой мышце бедра.
Было доказано, что в процессе двигательной реабилитации пациентов, перенесших инсульт, тренировка рук влияет на качество ходьбы из-за активации межнейрональных связей (Каирр С, Pearcey G.E, Klarner Т, Sun Y, Cullen Н, Barss T.S, Zehr E.P. Rhythmic arm cycling training improves walking and neurophysiological integrity in chronic stroke: the arms can give legs a helping hand in rehabilitation. J Neurophysiol 119:1095-1112, 2018). Циклические движения рук у этих пациентов модулировали величину рефлекторных двигательных ответов мышц ног, увеличивали силу мышц ног, координацию мышечной активности во время ходьбы, координацию между руками и ногами во время ходьбы. Следовательно, руки помогают в реабилитации ходьбы после инсульта.
Настоящее изобретение направлено на разработку способа регуляции и восстановления самостоятельной ходьбы у пациентов с двигательной патологией различного генеза путем использования мультисегментарной электрической чрескожной стимуляции спинного мозга (ЧССМ) и активации врожденных межконечностных двигательных синергий.
Метод чрескожной электрической стимуляции позволяет воздействовать на спинной мозг в нескольких сегментах одновременно. Поэтому появляется возможность одновременной прямой и опосредованной активации спинальных структур, регулирующих локомоцию. Прямая стимуляция связана с направленной активацией моторных пулов тех или иных групп мышц, задействованных в разные фазы шага. Опосредованное воздействие адресуется к нейронной локомоторной сети, которая генерирует локомоторный паттерн, то есть, задает ритм и определяет структуру движения. Таким образом, при движениях непораженных верхних и/или нижних конечностей (руки или ноги), которые облегчены посредством стимуляции, происходит согласованное координированное сокращение и расслабление групп мышц, пораженных нижних и/или верхних конечностей, что включает врожденные механизмы управления движением.
Стимуляция состоит из непрерывной стимуляции и прерывистой (ритмической) стимуляции.
Непрерывную стимуляцию осуществляют для облегчения движений непораженных конечностей. Непрерывную стимуляцию поясничного утолщения спинного мозга используют на уровне позвонков Т11-Т12, чтобы облегчить движения ног. При необходимости дополнительно осуществляют непрерывную стимуляцию шейного отдела спинного мозга (шейного утолщения) на уровне позвонков С5-С6 для увеличения активности рук. Также дополнительную непрерывную стимуляцию могут применять в области грудного и/или крестцового отделов спинного мозга.
На фоне непрерывной стимуляции по меньшей мере одно из перечисленных отделов спинного мозга происходит прерывистая (ритмическая) стимуляция корешков спиннрго мозга на уровне позвонков Т11 и L1 для реализации определенного типа или фазы движения, которое синхронизировано с ритмическими движениями неповрежденных верхних и/или нижних конечностей (рук и ног).
Режимы прерывистой или непрерывной стимуляции назначаются специалистом/врачом и определены патологией и характеристиками движений непораженных частей тела.
Режим стимуляции в общем, как и шаг, состоит из нескольких фаз, характеризующих процесс шагания. Шаг состоит из фазы проталкивания/отталкивания, фазы переноса, фазы опоры (по кинематике движений ног). Информация об указанных фазах шага детектируется. При этом пространственно-избирательная ритмическая стимуляции локусов спинного мозга синхронизирована с типом движений, которые осуществляются в данный период времени. А начало и конец этой стимуляции определяет фаза движений неповрежденных рук и ног (пространственно-временная ритмическая стимуляция).
Информация о фазах шага требуется для включения стимуляции спинного мозга в нужном месте в нужный момент времени: мышцы разгибатели нужно активировать во время фазы опоры, мышцы сгибатели - во время фазы переноса. Так, для активации мышц-сгибателей во время детектируемых фаз проталкивания и переноса осуществляют ритмическую стимуляцию корешков верхних сегментов поясничного утолщения спинного мозга для того, чтобы активировать мышцы-сгибатели ног. В детектируемой фазе опоры стимулируют корешки нижних сегментов поясничного утолщения спинного мозга, чтобы активировать мышцы-разгибатели ног. Для регуляции движений правой ноги осуществляют стимулирование корешков спинного мозга справа, для регуляции движений левой ноги - корешков спинного мозга слева. Точность чрескожной стимуляции «до корешка» позволяет вызывать активность мышц адресно: активность мышц справа или слева, активность мышц сгибателей и разгибателей.
Длительности отдельных фаз прерывистой стимуляции определяются особенностями походки и движений неповрежденных верхних и/или нижних конечностях пациента, в частности, зависят от фазы и скорости движения верхних и/или нижних конечностях пациента.
Чрескожная электрическая стимуляция спинного мозга реализуется с применением монополярных прямоугольных импульсов или биполярных прямоугольных импульсов с амплитудой тока от 1 до 200 мА и частотой модуляции в диапазоне от 5 кГц до 10 кГц.
В предпочтительных вариантах осуществления изобретения амплитуда тока не превышает 100 мА, так как предполагается использовать стимуляцию спинного мозга и на пациентах с сохранной чувствительностью.
Интенсивность тока при стимуляции назначается специалистом/врачом, но может корректироваться пациентом в ограниченном диапазоне. Интенсивность тока подбирается индивидуально в зависимости от возбудимости, индивидуальной величины порога двигательного ответа и болевой чувствительности пациента.
Частота чрескожной электрической стимуляции лежит в диапазоне 1-99 Гц. В некоторых вариантах осуществления изобретения частоту непрерывной стимуляции спинного мозга по меньшей мере на уровне позвонков Т11-Т12 выбирают в диапазоне от 30 Гц до 45 Гц. При необходимости одновременной непрерывной стимуляции спинного мозга на уровне позвонков С5-С6 и Т11-Т12 в некоторых вариантах осуществления изобретения частоту стимуляции выбирают в диапазоне от 30 Гц до 45 Гц. В частных случаях воплощения изобретения частоту ритмической стимуляции корешков спинного мозга на уровне позвонка L1 выбирают в диапазоне от 10 Гц до 30 Гц. В частных случаях воплощения изобретения частоту ритмической стимуляции корешков спинного мозга на уровне позвонка Т11 выбирают в диапазоне от 30 Гц до 50 Гц.
Мультисегментарноестимуляционное воздействие на структуры спинного мозга осуществляется через отдельные электроды или электродную матрицу, закрепленную в области позвоночника пациента. Электродная матрица для чрескожной стимуляции спинного мозга может размещаться на коже над позвоночником на уровне грудного, а также шейного, и/или поясничного, крестцового отделов позвоночника в проекции соответствующих нейронов и нейронных сетей спинного мозга.
Запуск и прекращение стимуляции может осуществляться от средства запуска или прекращения стимуляции, на которое поступают сигналы, характеризующие какое-либо внешнее управление. В качестве внешнего управления может быть выбрано движение по меньшей мере одной из непораженных верхних/нижних конечностей, движения головы, подъем плеча, движения туловища и любое другое движение.
Например, в качестве внешнего управления может выступать движение в плечевом суставе, которое детектируется при опоре на средство опоры (палка, трость, костыль и так далее), которую держит соответствующая рука пациента. Данное движение в плечевом суставе пациента запускает стимуляцию, вызывающую отрыв от опоры контралатеральной ноги.
Например, в качестве внешнего управления может выступать движение непораженной верхней конечности (руки) в тех случаях, когда хотя бы одна рука может двигаться во время ходьбы. В этом случае движение по меньшей мере одной руки запускает стимуляцию и вызывает отрыв от опоры контралатеральной ноги.
В некоторых случаях, когда патология повреждения такова, что пациент может стоять и немного идти, но руки не двигаются или ампутированы, то несмотря на то, что нельзя воспользоваться межконечностной синергией, возможно запустить пространственно-временную стимуляцию спинного мозга любым доступным для пациента способом, например, поворотом головы или подъемом плеча.
Настоящее изобретение также направлено на разработку спинального нейропротеза, с помощью которого осуществляется чрескожная электрическая стимуляция спинного мозга и который обеспечивает регуляцию и восстановление самостоятельной ходьбы у пациентов с двигательной патологией различного генеза. Спинальный нейропротез является средством передвижения и средством реабилитации, а его использование приводит не только к восстановлению естественной ходьбы, но и к восстановлению подвижности паретичной руки у пациентов, перенесших инсульт.
Спинальный нейропротез представляет собой комплекс из многоканального стимулятора для чрескожной электрической стимуляции спинного мозга и подключенных к стимулятору электродов или электродной матриц, закрепленных на коже над позвоночником пациента. Электроды или электродная матрица предназначены для многократного использования и обладают высокой токопроводимостью. Также спинальный протез включает по меньшей мере одно средство регистрации для обнаружения определенной фазы, характеризующей процесс шагания, и средство запуска или прекращения стимуляции.
Средство регистрации предназначено для обнаружения соприкосновения с поверхностью нижних конечностей или средства опоры, на которую опирается непораженная верхняя конечность, и отрыва от поверхности нижних конечностей или средства опоры, на которую опирается непораженная верхняя конечность. При этом средство регистрации выполнено с возможностью передачи управляющего сигнала на стимулятор при обнаружении указанных выше событий.
Средства передачи данных выбираются из устройств, предназначенных для реализации процесса коммуникации между различными устройствами посредством проводной и/или беспроводной связи, в частности, такими устройствами могут быть: GPS модем, BLE модуль или Bluetooth, Wi-Fi приемопередачик и т.п.
Стимулятор обеспечивает подачу на соответствующие электроды электрического тока определенной формы по заданным алгоритмам на основе полученных от средства регистрации управляющих сигналов. Программы с необходимыми инструкциями для выполнения способа регуляции и восстановления самостоятельной ходьбы в зависимости от патологии двигательной активности пациента содержатся в, по меньшей мере, одном средстве хранения данных стимулятора.
Средство хранения данных может представлять собой жесткий диск (HDD), твердотельный накопитель (SSD), флэш-память (NAND-flash, EEPROM, DataFlash и т.п.), мини диск или их совокупности.
Основную вычислительную работу для реализации алгоритма подачи электрического тока на электроды в зависимости от получаемых данных выполняет микроконтроллер. Все компоненты стимулятора соединены между собой посредством шины передачи данных.
Микроконтроллер стимулятора обеспечивает запуск и прекращение стимуляции в зависимости от получаемого управляющего сигнала от средства запуска или прекращения стимуляции при осуществлении внешнего управления. В частности, микроконтроллер обеспечивает подачу на тот или иной канал стимулятора, а, следовательно, и на соответствующий электрод, подключенный к нему, подачу электрического тока заданной формы и частоты.
Микроконтроллер стимулятора обеспечивает включение и выключение непрерывной стимуляции путем регулирования подачи электрического тока на соответствующие электроды в зависимости от получаемого управляющего сигнала от средства запуска или прекращения стимуляции при осуществлении внешнего управления.
Средство запуска или прекращения стимуляции может быть реализовано с помощью кнопки для нажатия подбородком или плечом, средства опоры, миограммы подвижной части тела пациента и любым другим способом. Средство запуска или прекращения стимуляции может быть выполнено в виде электромеханического переключателя или радиочастотного переключателя.
Микроконтроллер стимулятора обеспечивает включения и выключения прерывистой (ритмической) стимуляции корешков спинного мозга путем регулирования подачи электрического тока на соответствующие электроды в зависимости от получаемого управляющего сигнала от средства регистрации обнаружения соприкосновения и/или отрыва непораженной и/или паретичной нижней конечности и/или средства опоры, на которую опирается непораженная верхняя конечность.
Средство регистрации может быть выполнено в виде датчика контакта с поверхностью или датчика контакта средства опоры с поверхностью.
В комплект спинального нейропротеза также могут быть включены датчик ускорения и/или датчик угловой скорости и/или датчик изменения угла в суставе, которые посредством средства передачи данных соединены с микроконтроллером.
Далее этапы способа регуляции и восстановления самостоятельной ходьбы у пациентов более подробно приведены на примере гемипареза. Гемипарез может возникать как самостоятельный феномен, либо является стадией развития гемиплегии или обнаруживается при восстановлении функции конечностей после гемиплегии.
При тренировке пациент может осуществлять ходьбу по неподвижной или движущейся поверхности с опорой непораженной верхней конечности на неподвижную опору. Например, пациент может находится на беговой дорожке, или в параллельных брусьях, когда здоровая рука держится за брусья на тренажере, или на полу, кода здоровая рука опирается на поручень.
В одном из альтернативных вариантов осуществления изобретения, когда пациент плохо координирован, он может тренировать самостоятельную ходьбу с частичной компенсацией веса тела с помощью подвесной системы. Также этот вариант тренировки может быть использован пациентами с верхним парапарезом, кода поражены обе руки. Например, пациента могут закрепить ремнями в области таза и подвесить в вертикальном положении таким образом, чтобы нижние конечности были свободны, но в тоже время опирались на опору. Тело пациента находится в состоянии маятника.
В другом альтернативном варианте осуществления изобретения пациент может осуществлять ходьбу во время тренировки по неподвижной опоре или по подвижной опоре со средством опоры, на которую опирается условно здоровая рука. В качестве средства опоры могут быть использованы скандинавские палки, шведские костыли, ортопедические трости и т.п.
Перед началом тренировки проводят подготовительный этап. Накожно, над позвоночником на уровне определенных отделов спинного мозга размещают матрицу электродов, электроды которой в пределах матрицы могут быть использованы независимо, или размещать отдельные электроды для чрескожной стимуляции спинного мозга (ЧССМ).
Более подробно, катоды располагают и закрепляют по средней линии между позвонками Т11-Т12 и латерально, отступя 1-3 см от средней линии, над корешками спинного мозга с пораженной стороны на уровне позвонка Т11 и позвонка L1. Для всех этих катодов общие аноды располагаются над гребнями подвздошных костей только на стороне расположения катода или с обеих сторон.
Дополнительно для стимуляции шейного утолщения катоды располагают и закрепляют по средней линии между позвонками С5-С6, аноды - над гребнями подвздошных костей. В частном случае (для более селективной стимуляции шейного утолщения) аноды располагаются над ключицами.
После установки электродов или матрицы электродов их подсоединяют к многоканальному стимулятору для чрескожкой электрической стимуляции.
Подбор интенсивности стимуляции осуществляется специалистом/врачом и пациентом. Для стимуляции с использованием центральных катодов, устанавливаемых по средней линии между позвонками С5-С6 и между позвонками Т11-Т12, интенсивность тока при непрерывной ритмической стимуляции (30-40 Гц) должна быть на уровне парастезии (ощущение покалываний, жжения, легкая болезненность, тяжесть в области катода) или на 5-10% меньше этой интенсивности, не вызывать неприятных или болезненных ощущений.
Для стимуляции с использованием латеральных катодов (Т11 и L1) интенсивность тока такая, которая вызывает сокращения мышц ног на одиночную стимуляцию пачкой импульсов (1 мс) длительностью 1 сек с частотой 10-50 Гц. Впоследствии токи такой интенсивности используются для ходьбы, но эта интенсивность также не должна вызывать неприятные ощущения. В ином случае интенсивность следует уменьшить.
Подбор тока происходит однократно, не перед каждым использованием спинального нейропротеза. Если произошла смена электродов (катоды/аноды), если нейропротез долго не использовался (от недели и дольше), тогда подбор тока повторяется. Значения подобранных интенсивностей электрического сохраняются в устройстве хранения данных многоканального стимулятора для ЧССМ, включенного в состав спинального нейропротеза. Запуск стимуляции осуществляется в положении стоя или сидя. Запуск произвольный за счет внешнего управления, инициирующего стимуляцию, с помощью средств запуска и прекращения стимуляции, описанных выше. Последовательно включаются каналы стимулятора для ЧССМ, подающие электрический ток на катоды, расположенные на уровне позвонков Т11-Т12, С5-С6. Стимуляция по этим катодам начинается и прекращается только после произвольного включения и выключения, соответственно. Далее последовательно запускают каналы стимулятора, подающие электрический ток на латеральные катоды, расположенные над корешками спинного мозга с пораженной стороны на уровне позвонков Т11 и L1.
Интенсивность электрического тока на латеральных катодах в начальный момент времени равна нулю. При движениях непораженных верхних и/или нижних частей тела (условно здоровых рук и ног) каналы стимулятора, подключенные к латеральным электродам, включаются, и на электроды, расположенные над корешками спинного мозга с пораженной стороны на уровне позвонков Т11 и L1, подают модулированные монополярные или биполярные импульсы электрического тока прямоугольной формы. Таким образом, произвольный запуск стимуляции по латеральным катодам - это фактически разрешение на стимуляцию по этим катодам.
В то же время, непрерывная стимуляция на уровне позвонков Т11-Т12, С5-С6 осуществляется в течение всей тренировки. В одном из вариантов осуществления изобретения осуществляют запуск и включение непрерывной стимуляции только на уровне позвонков Т11-Т12 для активации нейронных локомоторных сетей спинного мозга на уровне поясничного утолщения. В одном из вариантов осуществления изобретения запуск и включение непрерывной стимуляции производится на уровне позвонков Т11-Т12 и С5-С6 для одновременной активации нейронных локомоторных сетей, регулирующих движение ног и рук, соответственно.
В одном из вариантов осуществления изобретения, в случае, когда пациент находится, например, на неподвижной поверхности с опорой непораженной верхней конечностью, способ регуляции и восстановления самостоятельной ходьбы у пациента осуществляют следующим образом.
После подготовительного этапа и произвольного запуска стимуляции включается непрерывная стимуляция по меньшей мере на уровне позвонков Т11-Т12 и запускается пространственно-временная и пространственно-избирательная стимуляции корешков спинного мозга на уровне позвонков Т11 и L1. Пациент опирается непораженной верхней конечностью на неподвижную опору и встает, на неподвижную поверхность. Начало ходьбы осуществляется из положения стоя.
Пациент делает движение непораженной нижней конечностью такое же, как при ходьбе, не отпуская неподвижную опору, и переносит ее вперед, осуществляя тем самым перенос веса тела на непораженную сторону. В момент отрыва непораженной нижней конечности от поверхности включается стимуляция корешков спинного мозга на стороне поражения на уровне позвонка L1. Длительность указанной стимуляции обусловлена временем от момента отрыва непораженной нижней конечности от поверхности до ее постановки на поверхность. В результате непораженная нижняя конечность (условно здоровая нога) вынесена перед паретичной нижней конечностью.
После постановки непораженной нижней конечности на поверхность одновременно с выключением стимуляции корешков спинного мозга на стороне поражения на уровне позвонка L1 включается и длится стимуляция по латеральному катоду Т11, расположенному над корешками спинного мозга на стороне поражения на уровне позвонка Т11. Указанная стимуляция вызывает движение контралатеральной паретичной нижней конечности, которая отрывается от поверхности и переносится вперед до позиции непораженной нижней конечности, перенося вес тела. Стимуляция корешков спинного мозга на стороне поражения на уровне позвонка Т11 выключается, когда паретичная нижняя конечность касается поверхности.
После этого цикл повторяется произвольное количество раз. Прекращение стимуляции осуществляется произвольно за счет внешнего управления посредством средства запуска и прекращения стимуляции. При окончании ходьбы пациент садится и отсоединяет спинальный нейропротез.
В одном из вариантов осуществления изобретения, в случае, когда пациент находится, например, на неподвижной поверхности со средством опоры, на которое опирается непораженная верхняя конечность пациента, способ регуляции и восстановления самостоятельной ходьбы у пациента осуществляют следующим образом.
После подготовительного этапа и произвольного запуска стимуляции включается непрерывная стимуляция на уровне позвонков Т11-Т12 и затем, при необходимости, на уровне позвонков С5-С6 и запускается пространственно-временная и пространственно-избирательная стимуляции корешков спинного мозга на уровне позвонков Т11 и L1. Пациент опирается непораженной верхней конечностью на средство опоры и встает на неподвижную поверхность. На средство опоры (палка, трость, костыль) опирается непораженная верхняя конечность с условно здоровой стороны тела пациента. Средство опоры стоит на неподвижной поверхности и вынесено немного вперед относительно нижних конечности пациента для устойчивости. Начало ходьбы осуществляется из положения стоя.
Пациент делает движение непораженной верхней конечностью такое же, как при ходьбе, не отпуская при этом средство опоры, и переносит ее вперед, осуществляя тем самым перенос веса тела на непораженную сторону тела пациента. В момент отрыва непораженной нижней конечности от поверхности включается стимуляция корешков спинного мозга на стороне поражения на уровне позвонка L1. Длительность указанной стимуляции обусловлена временем от момента отрыва непораженной нижней конечности от поверхности до ее постановки на поверхность. После постановки непораженной нижней конечности на поверхность стимуляции корешков спинного мозга на стороне поражения на уровне позвонка L1 прекращается. В результате непораженная нижняя конечность (условно здоровая нога) вынесена перед паретичной нижней конечностью и средством опоры.
Далее, непораженная верхняя конечность, которая опирается на средство опоры, отрывает средство опоры от поверхности и переносит его несколько вперед относительно непораженной нижней конечности. В момент отрыва средства опоры от поверхности включается стимуляция по латеральному катоду Т11, расположенному над корешками спинного мозга на стороне поражения на уровне позвонка Т11. Указанная стимуляция вызывает движение контралатеральной паретичной нижней конечности, которая отрывается от поверхности и переносится вперед до позиции непораженной нижней конечности, перенося вес тела. Стимуляция корешков спинного мозга на стороне поражения на уровне позвонка Т11 выключается, когда паретичная нижняя конечность касается поверхности.
После этого цикл повторяется произвольное количество раз. Прекращение стимуляции осуществляется произвольно за счет внешнего управления посредством средства запуска и прекращения стимуляции. При окончании ходьбы спинальный нейропротез отсоединяют.
Описанный выше метод также возможно распространить на парезы нижних конечностей при сохраненной функции поддержки веса тела, в том числе, со средствами опоры (травма спинного мозга со степенью тяжести D, Е по шкале ASIA, ДЦП со степенью тяжести 1-3 по шкале GMFCS, травмы головного мозга, демиелинезирующие заболевания и т.п. с аналогичными двигательными нарушениями).
Стимуляция в этом случае будет также пространственно-временная. Запуск стимуляции может происходить от непораженных верхних конечностей (рук). Например, правая рука запускает стимуляцию мышц, обеспечивающих фазу опоры и фазу переноса левой ноги, и симметрично - левая рука запускает стимуляцию мышц, обеспечивающих фазу опоры и фазу переноса правой ноги. Также можно будет применять указанный метод и при тетрапарезах в случаях, если пациент имеет возможность стоять со средствами опоры или без них. Активность рук при этом увеличивается применением стимуляции шейного отдела
Важным является тот факт, что для регуляции межконечностныхсинергий осуществляется мультисегментарнаянеинвазивная стимуляция шейного и поясничного отделов спинного мозга. Поэтому наряду с обеспечением межконечностной координации, стимуляция шейного отдела будет также восстанавливать двигательные функции паретичной руки. Доказано, что ЧССМ шейного отдела приводит к восстановлению функций верхних конечностей у парализованных пациентов (Inanici F. etal. Transcutaneous Electrical Spinal Stimulation Promotes Long-term Recovery of Upper Extremity Function in Chronic Tetraplegia //IEEE Transactions on Neural Systems and Rehabilitation Engineering. - 2018; Gad P. et al. Noninvasive activation of cervical spinal networks after severe paralysis // Journal of neurotrauma. - 2018. - №. ja.).
Возможность объективного проявления технического результата при использовании изобретения подтверждена достоверными данными, приведенными в примерах, содержащих сведения экспериментального характера. Следует понимать, что эти и все приведенные в материалах заявки примеры не являются ограничивающими и приведены только для иллюстрации настоящего изобретения.
Все исследования проведены на здоровых добровольцах.
Пример 1. Произвольные движения рук увеличивают амплитуду непроизвольных движений ног, вызванных чрескожной электрической стимуляцией спинного мозга.
Исследование проведено для того, чтобы продемонстрировать, как ритмические движения рук облегчают двигательные эффекты, вызываемые ЧССМ. Методы
Исследования выполнены на базе Великолукской академии физической культуры и спорта (ВЛГАФК). В исследованиях принимали участие здоровые добровольцы -молодые мужчины, сотрудники и студенты ВЛГАФК (N=11, 20-35 лет). В соответствии с принципами Хельсинкской декларации было получено информированное письменное согласие испытуемых на участие в исследованиях.
Испытуемые находились в положения полулежа (фиг. 1) в биомеханическом тренажере для нейрореабилитации двигательных и висцеральных функций Биокин-ЭС ®. Тренажер обеспечивает произвольные или принудительные движения ног и/или рук. Движения ног осуществляются в тазобедренном, коленном и голеностопном суставах, имитируя ходьбу на месте. Движения рук - в плечевом, локтевом и лучезапястном суставах, приводя к плечу и отталкивая от себя рычаги в сагиттальной плоскости. Испытуемым проводили чрескожную стимуляцию спинного мозга (ЧССМ) на трех уровнях: между позвонками T12-L1, L1-L2, С4-С5. Метод ЧССМ детально был описан ранее [Gerasimenko Y. etal. Initiation and modulation of locomotor circuitry output with multisite transcutaneous electrical stimulation of the spinal cord in noninjured humans // Journal of neurophysiology. - 2014. - T. 113. - №. 3. - C. 834-842.]. Для ЧССМ использовали пятиканальный программируемый нейростимулятор Биостим-5 (ТМ), который может быть использован как для диагностических, так и для лечебных процедур с применением метода неинвазивной электрической стимуляции спинного мозга. Применяли прямоугольные монополярные импульсы, модулированные частотой 5 кГц, длительностью 1 мс.Частота следования импульсов 30 Гц. Интенсивность стимуляции подбирали индивидуально, постепенно увеличивая амплитуду импульсов от 5 мА, добиваясь двигательного ответа во всех регистрируемых мышцах ног при стимуляции на поясничном уровне, ориентируясь на ощущения испытуемого при стимуляции на шейном уровне. Максимальная интенсивность тока составила 70 мА при стимуляции на поясничном уровне и 30 мА на шейном уровне. Регистрировали электрическую активность мышц (ЭМГ) бедра, m. bicepsfemoris, m. rectusfemoris, и мышц голени, m. gastrocnemius, m. tibialisanterior, обеих ног с использованием накожных электродов из токопроводящего пластика с адгезивной поверхностью (Kendal). Для регистрации движений рук применяли локтевые гониометры. Для регистрации ЭМГ и движений конечностей был использован аппаратно-программный комплекс Mega (Finland). Также вели видеорегистрацию с использованием системы видеозахвата компании Qualisys Medical, маркеры-отражатели прикреплялись к телу испытуемых с обеих сторон в точках сгиба плечевого, тазобедренного, коленного и голеностопного сустава, а также на больших пальцах ног.
Испытуемый находился в тренажере в состоянии покоя (фиг. 2), через 30 с начинали ЧССМ на уровне позвонков T12-L1, еще через 30 с подключали стимуляцию на уровне позвонков L1-L2, еще через 30 с - на уровне позвонков С4-С5 стимуляция продолжали ЧССМ на трех уровнях, еще через 30 с по команде экспериментатора испытуемый начинал выполнять произвольные движения рук.
Анализировали влияние характера движений и условий ЧССМ на кинематические параметры движений ног и активность мышц ног. Кинематические характеристики рассчитывались на основе видеозаписи, по координатам маркеров, расположенных на суставах, амплитуда и скорость шага по координатам движений большого пальца. Мышечную активность оценивали по интегральной характеристике ЭМГ для каждого из режимов стимуляции, для чего ЭМГ запись фильтровали, чтобы избавиться от артефактов ЧССМ, инвертировали в область положительных значений и определяли площадь под кривой за 30 с. Изменения интегральной характеристики в каждом из режимов оценивали по ее отношению к значению в начальном условии (т.е. за первые 30 с исследования). Рассчитанные относительные величины усреднялись для всех испытуемых, учитывали результаты двух ног. Математическая обработка данных выполнена с помощью оригинальных программ и электронных таблиц MicrosoftExcel.
Результаты
Ни у одного из испытуемых ЧССМ на уровне поясничного отдела спинного мозга (электроды на позвонках T12-L1, L1-L2) не вызывала движений ног (фиг. 3, 4), но увеличивала мышечную активность (фиг. 4В). Отсутствие движений на фоне увеличивающейся активности мышц связано с недостаточностью мощности вызванной мышечной активности для сдвига тяжелой каретки тренажера. Дополнительная стимуляция на шейном уровне у части испытуемых вызывала малоамплитудные движения ног (фиг. 4А), амплитуда движений маркеров на больших пальцах ног составляла до 4-5 см при неподвижной каретке тренажера, (фиг. 3).
Произвольные ритмические движения рук в сагиттальной плоскости на фоне ЧССМ поясничного и шейного отделов у всех испытуемых вызывали ритмические движения в суставах ног (фиг. 4А), причем движения в суставах правой и левой ног были реципрокны (фиг. 4Б), то есть по характеристикам вызванные движения были похожи на шагательные движения. Активность мышц была максимальной во время произвольных движений рук (фиг. 4.В).
Заключение
Произвольные движения рук в ритме шага увеличивают суммарную активность мышц ног и способствуют вызову ритмических шагоподобных движений ног в ответ на многоуровневую ЧССМ.
Пример 2. Пространственно-временная электрическая чрескожная стимуляция спинного мозга модулирует характеристики шаговых движений человека.
Исследование проведено для того, чтобы продемонстрировать, что периодически, привязавшись к фазе шага, стимулируя корешки спинного мозга на уровне Т11 позвонков можно модулировать фазу переноса в шагательном цикле (флексию), а также, что периодически, привязавшись к фазе шага, стимулируя на уровне L1 позвонков, можно модулировать фазу опоры (экстензию).
Методы
Исследования выполнены на базе ВЛГАФК. В исследованиях принимали участие здоровые добровольцы - молодые мужчины, сотрудники и студенты ВЛГАФК (N=9, 20-35 лет). В соответствии с принципами Хельсинкской декларации было получено информированное письменное согласие испытуемых на участие в исследованиях.
Испытуемые шли с использованием скандинавских палок для ходьбы по беговой дорожке тренажера (фиг. 5). Скорость дорожки подбирали индивидуально, комфортная для всех испытуемых скорость находилась в диапазоне 1,8-2,0 км/ч. В опорные концы скандинавских палок вмонтированы микропереключатели, которые замыкаются при опоре на палку, синхросигнал от замыкания подается на коммутатор, который запускает каналы программируемого электростимулятора Биостим-5 (ТМ), который разрабатывает и производит ООО «Косима».
Метод ЧССМ, алгоритм подбора интенсивности стимуляции, характеристики импульсов те же, что и в Примере 1. Отличия перечислены ниже.
Все стимулирующие электроды, 5 катодов, фиксировали в области поясничного отдела позвоночника (фиг. 6). Один катод располагался по центру позвоночника, над проекцией позвонка Т11, остальные катоды фиксировали над корешками Т11, над корешками L1 слева и справа. Аноды - над гребнями подвздошных костей, пара анодов общая для всех катодов.
Стимуляция по электроду 1 периодическая, включение стимуляции при опоре на контралатеральную (левую) палку, выключение при отрыве контралатеральной (левой) палки.
Стимуляция по электроду 2 периодическая, включение стимуляции при отрыве контралатеральной (левой) палки, выключение при опоре на контралатеральную (левую) палку.
Стимуляция по электроду 3 периодическая, включение стимуляции при отрыве контралатеральной (правой) палки, выключение при опоре на контралатеральную (правую) палку.
Стимуляция по электроду 4 периодическая, включение стимуляции при опоре на контралатеральную (правую) палку, выключение при отрыве контралатеральной (правой) палки.
Стимуляция по электроду 5 непрерывная.
Процедура стимуляции:
1. испытуемый шел по беговой дорожке 15 сек;
2. непрерывно 15 сек стимулировали на уровне позвонка Т11 (электрод 5 на фиг. 6) на фоне ходьбы;
3. периодическая стимуляция 15 сек корешка L1 справа (электрод 1 на фиг. 6), на фоне ходьбы и непрерывной стимуляции на уровне позвонка Т11;
4. периодическая стимуляция 15 сек правого корешка Т11 (электрод 2 на фиг. 6), на фоне ходьбы и непрерывной стимуляции на уровне позвонка Т11, периодической стимуляции правого корешка L1;
5. периодическая стимуляция 15 сек левого корешка L1 (электрод 3 на фиг. 6), на фоне ходьбы и непрерывной стимуляции на уровне позвонка Т11, периодической стимуляции правых корешков L1, Т11;
6. периодическая стимуляция 15 сек левого корешка Т11 (электрод 4 на фиг. 6), на фоне ходьбы и непрерывной стимуляции на уровне позвонка Т11, периодической стимуляции правых корешков L1, Т11, левого корешка L1,'
7. ходьба 15 сек без стимуляции по беговой дорожке.
Регистрация электрической мышечной активности и кинематики движений с помощью видеоанализа такая же, как в Примере 1. Результаты
Фиг. 7 демонстрирует прирост суммарной активности мышц (линии 1-4 и 7-10) в ответ на подключение каждого уровня стимуляции. Хорошо заметно увеличение угла правого колена (линии 5 и 6) при периодической стимуляции на электрод 1 (линия 11), активирующий экстензоры, обеспечивающие фазу опоры при ходьбе.
Результаты анализа кинематики ходьбы показаны на фиг. 8. При ходьбе здорового человека по беговой дорожке с постоянной скоростью эффект непрерывной ЧССМ на уровне позвонка Т11 (фиг. 8Б) практически не отражается.
При периодической (соответствующей фазе опоры) стимуляции правого корешка спинного мозга на уровне L1 изменения в кинематике фазы опоры, на первый взгляд, не очевидны и это связано с тем, что ритм ходьбы задает бегущая дорожка. Но и в таких условиях эффект можно увидеть.
Крайние значения и диапазон изменений углов в правых тазобедренном, коленном и голеностопном суставах при условиях А-Г на фиг. 8 приведены в таблице 1 (в угл. град.).

Диапазон изменений угла колена (фиг. 8, А-В) при нормальной ходьбе составлял 127-180 угл. град, при стимуляции непрерывной ЧССМ на уровне Т11 - 129-179 угд. град., при стимуляции корешка L1 - 122-180 угл. град., то есть зарегистрировано увеличение диапазона изменения угла в коленном суставе при активации экстензоров в фазе опоры, увеличение диапазона происходит за счет большего сгибания в коленном суставе. Диапазон изменений угла голеностопа также увеличился (фиг. 8, А-В) при нормальной ходьбе составлял 94-118 угл. град, при стимуляции непрерывной ЧССМ на уровне Т11 -94-120 угд. град., при стимуляции корешка L1 - 91-121 угл. град., то есть зарегистрировано увеличение диапазона изменения угла в коленном суставе при активации экстензоров в фазе опоры, увеличение диапазона происходит за счет увеличения тыльного сгибания стопы. Внешне ходьба при стимуляции корешка L1 справа выглядела как будто испытуемые приседали на стимулированную правую сторону.
При периодической (соответствующей фазе переноса) стимуляции правого корешка спинного мозга на уровне Т11 заметно увеличился подъем стопы над опорой: контур, описывающий траекторию движения большого пальца правой ноги поднимается значительно выше, чем при всех других вариантах стимуляции (см. пунктирный треугольник, соответствующий параметрам фазы опоры и фазы переноса при ходьбе без стимуляции). Это демонстрирует работу сгибателей (экстензеров), чья активация необходима во время фазы переноса. Еще больше, чем при стимуляции корешка L1 увеличился диапазон изменений в коленном уставе (111-180 угл. град.) и также увеличился диапазон в голеностопном суставе (90-124 угл. град.) (фиг. 8). Увеличилось сгибание в колене и разгибание в голеностопном суставе, внешне такая ходьба смотрелась как акцентированный подъем правого колена при ходьбе.
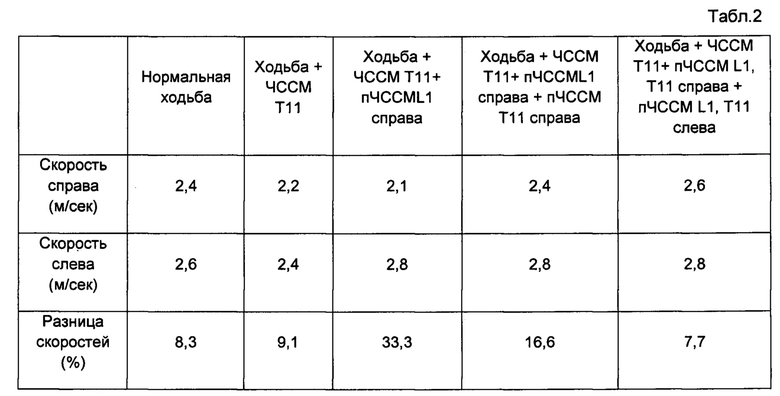
При стимуляции правых корешков выявилась существенная асимметрия динамических характеристик ходьбы. Изменения максимальной мгновенной скорости шага при ходьбе по беговой дорожке со скоростью 2 км/ч для правой и левой ноги приведены в таблице 2.
Измерения по маркеру на большом пальце ноги. Усредненные по всем шагательным циклам за 15 сек. пЧССМ - периодическая, привязанная к фазе шага, чрескожная стимуляция спинного мозга.
Максимальная мгновенная скорость шага справа отличалась от этого показателя слева на 17-33% при асимметричной стимуляции и на 8-9% при симметричной ЧССМ или в отсутствии стимуляции.
Заключение
Показано, что ЧССМ, приложенная над корешками спинного мозга, активирующими мышцы-экстензоры и мышцы-флексоры в шаговую фазу опоры и шаговую фазу переноса, соответственно, модулирует кинематические и динамические характеристики шага и, следовательно, может применяться для управления походкой человека.
Несмотря на то, что изобретение описано со ссылкой на раскрываемые варианты воплощения, для специалистов в данной области должно быть очевидно, что конкретные подробно описанные исследования приведены лишь в целях иллюстрирования настоящего изобретения, и их не следует рассматривать как каким-либо образом ограничивающие объем изобретения. Должно быть понятно, что возможно осуществление различных модификаций без отступления от сути настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕИНВАЗИВНАЯ ЭЛЕКТРОДНАЯ МАТРИЦА СПИНАЛЬНОГО НЕЙРОПРОТЕЗА И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2021 |
|
RU2778009C1 |
| УСТРОЙСТВО ДЛЯ НЕИНВАЗИВНОЙ ЭЛЕКТРИЧЕСКОЙ СТИМУЛЯЦИИ СПИННОГО МОЗГА | 2015 |
|
RU2627359C2 |
| Способ и устройство контроля положения головы пациента и его коррекции путем неинвазивной нейростимуляции | 2022 |
|
RU2822711C2 |
| СПОСОБ НАКОЖНОЙ ЭЛЕКТРОСТИМУЛЯЦИИ СПИННОГО МОЗГА | 2012 |
|
RU2529471C2 |
| СПОСОБ ЭЛЕКТРИЧЕСКОЙ СТИМУЛЯЦИИ СПИННОГО МОЗГА | 2011 |
|
RU2471518C2 |
| Способ коррекции локомоторных функций человека после нарушения церебрального кровообращения ишемического генеза | 2020 |
|
RU2743222C1 |
| СПОСОБ РЕГУЛЯЦИИ ВИСЦЕРАЛЬНЫХ ФУНКЦИЙ ПАЦИЕНТА ПУТЕМ НЕИНВАЗИВНОЙ СТИМУЛЯЦИИ СПИННОГО МОЗГА | 2016 |
|
RU2642384C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФУНКЦИИ НЕРВОВ | 2017 |
|
RU2662657C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ДВИЖЕНИЙ РУК У БОЛЬНЫХ С ВЕРХНИМИ ПАРАЛИЧАМИ И ПАРЕЗАМИ | 2011 |
|
RU2475283C2 |
| СПОСОБ СТИМУЛЯЦИИ СПИННОГО МОЗГА | 2008 |
|
RU2393885C1 |
Группа изобретений относится к области медицины, в частности к нейрофизиологии, и может быть использовано для регуляции и восстановления самостоятельной ходьбы у пациентов с травматическими повреждениями и/или заболеваниями спинного и/или головного мозга с использованием чрескожной электрической стимуляции спинного мозга. Способ включает одновременную непрерывную стимуляцию спинного мозга по меньшей мере на уровне позвонков Т11-Т12 и ритмическую стимуляцию корешков спинного мозга на уровне позвонков Т11 и L1, при которой уровень стимуляции и латерализации стимуляции зависит от фазы и скорости движения непораженной верхней и/или нижней конечности. При этом включение ритмической стимуляции корешков спинного мозга осуществляется за счет движения непораженной верхней и/или нижней конечности. Спинальный нейропротез включает многоканальный стимулятор для чрескожной электрической стимуляции спинного мозга, который включает по меньшей мере одно устройство хранения данных и одну или более программ, загружаемых в по крайней мере одно устройство хранения данных, при этом одна или более программ содержит инструкции для выполнения способа по любому из пунктов 1-14, электроды или матрицу электродов, подключаемые к указанному стимулятору, по меньшей мере одно средство регистрации для обнаружения соприкосновения и/или отрыва непораженной и/или паретичной нижней конечности и/или средства опоры, на которую опирается непораженная верхняя конечность от поверхности при осуществлении ходьбы, средство запуска или прекращения стимуляции. Группа изобретений обеспечивает улучшение неврологического восстановления двигательной активности, повышение эффективности реабилитации за счет использования чрескожной электрической стимуляции спинного мозга с одновременной непрерывной стимуляции спинного мозга по меньшей мере на уровне позвонков Т11-Т12 и ритмической стимуляции корешков спинного мозга на уровне позвонков Т11 и L1. 2 н. и 19 з.п. ф-лы, 2 табл., 8 ил., 2 пр.
1. Способ регуляции и восстановления самостоятельной ходьбы у пациентов с травматическими повреждениями и/или заболеваниями спинного и/или головного мозга с использованием чрескожной электрической стимуляции спинного мозга, включающий одновременную
- непрерывную стимуляцию спинного мозга по меньшей мере на уровне позвонков Т11-Т12
- и ритмическую стимуляцию корешков спинного мозга на уровне позвонков Т11 и L1, при которой уровень стимуляции и латерализации стимуляции зависит от фазы и скорости движения непораженной верхней и/или нижней конечности,
при этом включение ритмической стимуляции корешков спинного мозга осуществляется за счет движения непораженной верхней и/или нижней конечности.
2. Способ по п. 1, в котором запуск и прекращение чрескожной электрической стимуляции спинного мозга осуществляется за счет внешнего управления.
3. Способ по п. 2, в котором в качестве внешнего управления может быть выбрано одно из: движение по меньшей мере одной непораженной верхней или нижней конечности, движение головы, подъем плеча, движение туловища, - осуществляемое для взаимодействия со средством запуска или прекращения стимуляции.
4. Способ по п. 1, в котором интенсивность тока при чрескожной электрической стимуляции подбирается индивидуально в зависимости от возбудимости и порога двигательного ответа и болевой чувствительности пациента.
5. Способ по п. 4, в котором для чрескожной электрической стимуляции спинного мозга используют монополярные прямоугольные импульсы или биполярные прямоугольные импульсы с частотой модуляции в диапазоне от 5 кГц до 10 кГц, при этом частоту стимуляции для непрерывной стимуляции спинного мозга по меньшей мере на уровне позвонков Т11-Т12 выбирают в диапазоне от 30 Гц до 45 Гц, частоту стимуляции для стимуляции корешков спинного мозга на уровне позвонка L1 выбирают в диапазоне от 10 Гц до 30 Гц, частоту стимуляции для стимуляции корешков спинного мозга на уровне позвонка Т11 выбирают в диапазоне от 30 Гц до 50 Гц.
6. Способ по п. 1, в котором у пациента наблюдается гемипарез.
7. Способ по п. 6, в котором пациент во время непрерывной стимуляции спинного мозга и ритмической стимуляции корешков спинного мозга осуществляет ходьбу по неподвижной или движущейся поверхности с опорой непораженной верхней конечности на неподвижную опору или с частичной компенсацией веса тела с помощью подвесной системы.
8. Способ по п. 7, включающий следующие последовательные этапы:
1) запуск и включение непрерывной стимуляции по меньшей мере на уровне позвонков Т11-Т12 и запуск ритмической стимуляции корешков спинного мозга на уровне позвонков Т11 и L1 за счет внешнего управления, инициирующего начало стимуляции,
2) включение стимуляции корешков спинного мозга на стороне поражения на уровне позвонка L1 в момент отрыва непораженной нижней конечности от поверхности и переноса ее вперед,
3) выключение стимуляции корешков спинного мозга на стороне поражения на уровне позвонка L1 с одновременным включением стимуляции корешков спинного мозга на стороне поражения на уровне позвонка Т11 в момент постановки непораженной нижней конечности на поверхность,
4) стимуляция корешков спинного мозга на стороне поражения на уровне позвонка Т11, когда паретичная нижняя конечность отрывается от поверхности и переносится вперед,
5) выключение стимуляции корешков спинного мозга на стороне поражения на уровне позвонка Т11 в момент постановки паретичной нижней конечности на поверхность,
6) повторение этапов 2) – 5) произвольное количество раз,
7) прекращение и выключение непрерывной стимуляции спинного мозга по меньшей мере на уровне позвонков Т11-Т12 и прекращение ритмической стимуляции корешков спинного мозга на уровне позвонков Т11 и L1 за счет внешнего управления, прекращающего стимуляцию.
9. Способ по п. 8, в котором непрерывную стимуляцию спинного мозга дополнительно осуществляют на уровне позвонков С5-С6.
10. Способ по п. 6, в котором пациент во время непрерывной стимуляции спинного мозга и ритмической стимуляции корешков спинного мозга осуществляет ходьбу по неподвижной или подвижной поверхности со средством опоры, на которую опирается непораженная верхняя конечность пациента.
11. Способ по п. 10, в котором средство опоры выбрано из: палка, трость, костыль.
12. Способ по п. 10, в котором пациент осуществляет ходьбу с использованием подвесной системы.
13. Способ по п. 10, включающий следующие последовательные этапы:
1) запуск и включение непрерывной стимуляции по меньшей мере на уровне позвонков Т11-Т12, запуск ритмической стимуляции корешков спинного мозга на уровне позвонков Т11 и L1 за счет внешнего управления, инициирующего начало стимуляции,
2) включение стимуляции корешков спинного мозга на стороне поражения на уровне позвонка L1 в момент отрыва непораженной нижней конечности от поверхности и переноса ее вперед,
3) выключение стимуляции корешков спинного мозга на стороне поражения на уровне позвонка L1 в момент постановки непораженной нижней конечности на поверхность,
4) включение стимуляции корешков спинного мозга на стороне поражения на уровне позвонка Т11 в момент отрыва средства опоры от поверхности и пронос средства опоры за счет движения непораженной верхней конечности вперед, постановка средства опоры на поверхность,
5) стимуляция корешков спинного мозга на стороне поражения на уровне позвонка Т11, когда паретичная нижняя конечность отрывается от поверхности и переносится вперед,
6) выключение стимуляции корешков спинного мозга на стороне поражения на уровне позвонка Т11 в момент постановки паретичной нижней конечности на поверхность,
7) повторение этапов 2) – 6) произвольное количество раз,
8) прекращение и выключение непрерывной стимуляции спинного мозга по меньшей мере на уровне позвонков Т11-Т12 и прекращение ритмической стимуляции корешков спинного мозга на уровне позвонков Т11 и L1 за счет внешнего управления, прекращающего стимуляцию.
14. Способ по п. 13, в котором непрерывную стимуляцию спинного мозга дополнительно осуществляют на уровне позвонков С5-С6.
15. Способ по п. 1, в котором чрескожную электрическую стимуляцию осуществляют с использованием многоканального стимулятора.
16. Способ по п. 15, в котором используется по меньшей мере одно средство регистрации для обнаружения:
- соприкосновения с поверхностью нижней конечности или средства опоры, на которую опирается непораженная верхняя конечность,
- отрыва от поверхности нижней конечности или средства опоры, на которую опирается непораженная верхняя конечность, причем по меньшей мере одно средство регистрации выполнено с возможностью передачи управляющего сигнала на стимулятор при обнаружении указанных выше событий.
17. Способ по п. 16, в котором стимулятор содержит
- по меньшей мере одно устройство хранения данных
- и одну или более программ, загружаемых в по крайней мере одно вышеупомянутое устройство хранения данных, при этом одна или более программ содержит инструкции для:
- запуска и прекращения стимуляции в зависимости от получаемого управляющего сигнала от средства запуска или прекращения стимуляции при осуществлении внешнего управления;
- включения и выключения непрерывной стимуляции путем регулирования подачи электрического тока на соответствующие электроды в зависимости от получаемого управляющего сигнала от средства запуска или прекращения стимуляции при осуществлении внешнего управления;
- включения и выключения ритмической стимуляции корешков спинного мозга путем регулирования подачи электрического тока на соответствующие электроды в зависимости от получаемого управляющего сигнала от по меньшей мере одного средства регистрации обнаружения соприкосновения и/или отрыва непораженной и/или паретичной нижней конечности и/или средства опоры, на которую опирается непораженная верхняя конечность.
18. Спинальный нейропротез для регуляции и восстановления самостоятельной ходьбы у пациентов с травматическими повреждениями и/или заболеваниями спинного или головного мозга, включающий
- многоканальный стимулятор для чрескожной электрической стимуляции спинного мозга, который включает по меньшей мере одно устройство хранения данных и одну или более программ, загружаемых в по крайней мере одно устройство хранения данных, при этом одна или более программ содержит инструкции для выполнения способа по любому из пп. 1-14,
- электроды или матрицу электродов, подключаемые к указанному стимулятору,
- по меньшей мере одно средство регистрации для обнаружения соприкосновения и/или отрыва непораженной и/или паретичной нижней конечности и/или средства опоры, на которую опирается непораженная верхняя конечность от поверхности при осуществлении ходьбы,
- средство запуска или прекращения стимуляции.
19. Спинальный нейропротез по п. 18, в котором по меньшей мере одно средство регистрации выбрано из: датчик контакта с поверхностью, датчик контакта средства опоры с поверхностью.
20. Спинальный нейропротез по п. 18, в котором средство запуска или прекращения стимуляции выполнено в виде электромеханического переключателя или радиочастотного переключателя.
21. Спинальный нейропротез по. п. 18, дополнительно включающий датчик ускорения и/или датчик угловой скорости и/или датчик изменения угла в суставе.
| СПОСОБ НАКОЖНОЙ ЭЛЕКТРОСТИМУЛЯЦИИ СПИННОГО МОЗГА | 2012 |
|
RU2529471C2 |
| УСТРОЙСТВО ДЛЯ НЕИНВАЗИВНОЙ ЭЛЕКТРИЧЕСКОЙ СТИМУЛЯЦИИ СПИННОГО МОЗГА | 2015 |
|
RU2627359C2 |
| КОСТЮМ ДЛЯ НЕЙРОМЫШЕЧНОЙ И СПИНАЛЬНОЙ ЭЛЕКТРИЧЕСКОЙ СТИМУЛЯЦИИ | 2017 |
|
RU2654285C1 |
| US 20180071528 A1, 15.03.2018 | |||
| WO 2009075625 A1, 18.06.2009 | |||
| WO 2012064968 A1, 18.05.2012 | |||
| WO 2017123529 A1, 20.07.2017. | |||

