Изобретение относится к приборам, используемым в информационно-измерительных системах ориентации вращающихся объектов и управления их движением.
Для формирования управляющих команд рулевого привода в опорной системе координат, связанной с вращением объекта, возникает задача определения текущего угла крена (значений синуса и косинуса данного угла). Для решения этой задачи можно использовать датчики угла крена на механических гироскопах [патент РФ на изобретение № 2184921, МПК F41G 7/00, опубл. 10.07.2002, бюл. № 19]. Устройство согласно изобретению содержит формирователи сигналов управления в вертикальной и горизонтальной плоскостях, выходы которых соединены соответственно с первыми входами первого и второго модуляторов, суммирующий усилитель, первый и второй входы которого соединены соответственно с выходами первого и второго модуляторов. Устройство также содержит гироскопический датчик угла крена подвижного объекта, первый выход которого соединен со вторым входом первого модулятора, а второй выход соединен со вторым входом второго модулятора, причем сигналы с первого и второго выходов гироскопического датчика угла крена являются релейными трехпозиционными, сдвинутыми относительно друг друга на угол π/2. В устройство введены формирователь сигнала линеаризации, вход которого соединен со вторым выходом гироскопического датчика угла крена, логическое устройство, вход которого соединен со вторым выходом гироскопического датчика угла крена, третий модулятор, первый вход которого соединен с выходом формирователя сигнала линеаризации, второй вход соединен с выходом логического устройства, а выход соединен с третьим входом суммирующего усилителя, а также двухпозиционный релейный элемент (компаратор), вход которого соединен с выходом суммирующего усилителя. Недостатком таких систем является невысокая точность определения угла крена подвижного объекта.
Наиболее близким по техническому решению является датчик крена и оборотов быстровращающегося управляемого снаряда [патент РФ на изобретение № 143669, МПК G01C 21/00, опубл. 27.07.2014], содержащий измеритель параметров снаряда, выполненный в виде двух акселерометров, жестко связанных с объектом так, что их оси чувствительности взаимно ортогональны и перпендикулярны продольной оси быстрого вращения снаряда, и вычислитель параметров снаряда, выполненный в виде микроконтроллера, причем выходы акселерометров подключены к двум информационным входам микроконтроллера, и в состав измерителя параметров снаряда дополнительно введены последовательно соединенные измеритель угловой скорости вращения снаряда и интегратор, а также двухосный датчик магнитного поля Земли, причем выходы интегратора и датчика магнитного поля Земли подключены к третьему, четвертому и пятому информационным входам микроконтроллера. Измеритель угловой скорости вращения снаряда содержит две пары одноосных акселерометров, расположенных равноудаленно от центра оси вращения снаряда под углом 90° друг относительно друга, или четыре одноосных микроэлектромеханических датчика угловой скорости, расположенных на боковых торцах основания в виде правильной четырехгранной усеченной пирамиды. Значительный фазовый сдвиг, на частоте возмущения, приводит к снижению точности определения угла крена, что является существенным недостатком.
Технической задачей настоящего изобретения является повышение точности измерения угла крена для вращающегося объекта.
Это достигается тем, что в датчик угла крена для вращающегося объекта, содержащий устройства для измерения ускорений, оси чувствительности которых взаимно ортогональны и перпендикулярны продольной оси вращения объекта, датчик угловой скорости, введены два канала и две перекрестные связи, причем первый канал реализован от первого цифрового устройства для измерения ускорений к первому преобразователю цифровой информации в прямой код через последовательно соединенные по информационным входам первый двоичный умножитель, первый реверсивный двоичный счетчик, итоговый регистр первого реверсивного двоичного счетчика, второй канал реализован от второго цифрового устройства для измерения ускорений к второму преобразователю цифровой информации в прямой код через последовательно соединенные по информационным входам шестой двоичный умножитель, второй реверсивный двоичный счетчик, итоговый регистр второго реверсивного двоичного счетчика. Кроме того, одна перекрестная связь реализована с выхода первого реверсивного двоичного счетчика на вход второго реверсивного двоичного счетчика второго канала через второй и третий двоичные умножители, вторая перекрестная связь реализована с выхода второго реверсивного двоичного счетчика на вход первого реверсивного двоичного счетчика первого канала через четвертый и пятый двоичные умножители, причем третий и пятый двоичные умножители соединены с цифровым устройством для измерения угловой скорости. Дополнительные входы первого, второго, четвертого, шестого двоичных умножителей соединены с выходом генератора вспомогательной частоты. Кроме того, выход первого преобразователя цифровой информации в прямой код соединен с одним из входов первого двоичного умножителя, выход второго преобразователя цифровой информации в прямой код соединен с одним из входов шестого двоичного умножителя, и выходы с первого и второго реверсивных двоичных счетчиков являются дискретными выходами датчика угла крена.
Введение в устройство для измерения угла крена вращающегося объекта прямых каналов и перекрестных связей между ними, итоговых регистров, двоичных умножителей, двоичных реверсивных счетчиков и преобразователей цифровой информации в прямой код позволяет повысить точность измерения.
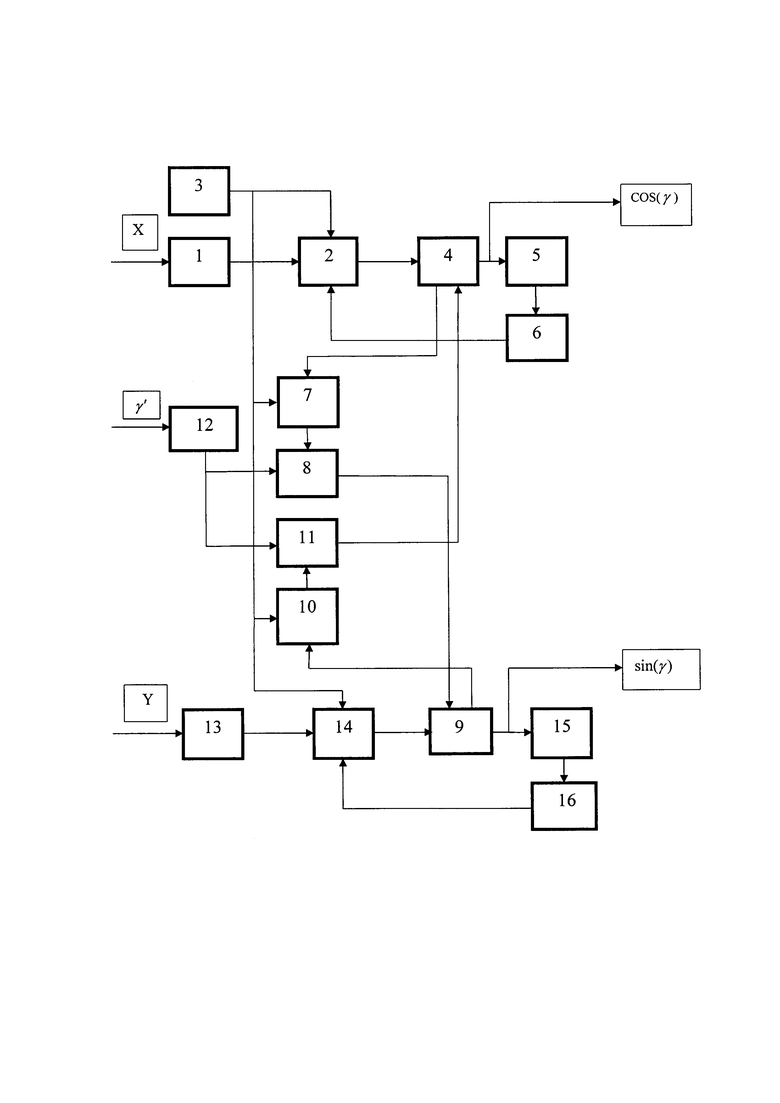
На чертеже изображена функциональная схема датчика угла крена для вращающегося объекта.
Датчик угла крена для вращающегося объекта содержит первое цифровое устройство для измерения ускорений 1, выход которого соединен с одним из входов первого двоичного умножителя 2, другой вход которого соединен с выходом генератора вспомогательной частоты 3. Выход первого двоичного умножителя 2 соединен с первым реверсивным двоичным счетчиком 4, выход которого соединен с первым итоговым регистром 5, выход которого соединен с первым преобразователем цифровой информации в прямой код 6. Выход первого преобразователя цифровой информации в прямой код 6 соединен с одним из входов первого двоичного умножителя 2. Выход первого реверсивного двоичного счетчика 4 соединен с входом второго двоичного умножителя 7, выход которого соединен с входом третьего двоичного умножителя 8, выход которого соединен с входом второго реверсивного двоичного счетчика 9. Выход второго реверсивного двоичного счетчика 9 соединен с входом первого реверсивного двоичного счетчика 4, через последовательно соединенные по информационным входам четвертым двоичным умножителем 10 и пятым двоичным умножителем 11. Входы двоичных умножителей 8 и 11 соединены с выходом цифрового устройства для измерения угловой скорости 12. Второе цифровое устройство для измерения ускорения 13 соединено с входом шестого двоичного умножителя 14, выход которого соединен с одним из входов второго реверсивного двоичного счетчика 9. Дополнительные входы двоичных умножителей 7, 10 и 14 соединены с выходом генератора вспомогательной частоты 3. Оси чувствительности цифровых устройств для измерения ускорений 1 и 13 взаимно ортогональны и перпендикулярны продольной оси вращения объекта. Выход второго реверсивного двоичного счетчика 9 соединен с входом второго итогового регистра 15, выход которого соединен с входом второго преобразователя цифровой информации в прямой код 16 Выход второго преобразователя цифровой информации в прямой код 16 соединен с одним из входов шестого двоичного умножителя 14. Выходы первого реверсивного двоичного счетчика 4 (cos(γ)) и второго реверсивного двоичного счетчика 9 (sm(γ)) являются дискретными выходами датчика угла.
Внутреннее содержание блоков, реализующих датчик угла крена описаны в книгах: Майоров С.А., Новиков Г.И. “Принцип организации цифровых машин”, Л.: Машиностроение, 1974, 432 с.; Хоровиц П., Хилл У. “Искусство схемотехники”. М.: Мир, т.1-3, 1993. Цифровые устройства для измерения ускорений и угловой скорости могут быть реализованы по одному из патентов: RU 2226695 С1, кл. G01P 15/13, опубл. 10.04.2004, Бюл. №10; RU 2190858 С1, кл. G01P 15/13, опубл. 10.10.02, Бюл. № 28, которые обеспечивают выдачу информации в 16-ти разрядном цифровом коде.
Работа датчика угла крена для вращающегося объекта осуществляется следующим образом.
Первое цифровое устройство для измерения ускорений 1 выдает информацию о линейном ускорении вдоль продольной оси в виде цифрового двоичного кода, который поступает на вход первого двоичного умножителя 2. Первый двоичный умножитель 2 выдает на выходе импульсы, число которых пропорционально двоичному коду с первого цифрового устройства для измерения ускорений 1. Если сигнал с выхода первого цифрового устройства для измерения ускорений 1 принять за X, то на выходе первого двоичного умножителя 2 имеем сигнал равный  (f - частота генератора вспомогательной частоты 3, n - разрядность первого двоичного умножителя 2). Для разделения во времени поступления сигналов с двоичных умножителей прямых каналов и перекрестных связей, генератор вспомогательной частоты 3 вырабатывает две серии тактирующих импульсов, которые поступают на вход синхронизации первого двоичного умножителя 2. Выходной сигнал с первого двоичного умножителя 2 поступает на один из входов первого реверсивного двоичного счетчика 4, который осуществляет подсчет импульсов с первого двоичного умножителя 2 (т.е. интегрирование). Выходной сигнал с первого реверсивного двоичного счетчика 4 поступает на вход первого итогового регистра 5, выход которого соединен с входом первого преобразователя цифровой информации в прямой код 6. Сигнал с выхода первого преобразователя цифровой информации в прямой код 6 поступает на один из входов первого двоичного умножителя 2. В реверсивном двоичном счетчике 4 формируется цифровой опрашиваемый сигнал. Аналогичным образом работает второй прямой канал при действии линейного ускорения вдоль поперечной оси Y, состоящий из второго цифрового устройства для измерения ускорений 13, шестого двоичного умножителя 14, второго реверсивного двоичного счетчика 9 и второго итогового регистра 15, выход которого соединен с входом второго преобразователя цифровой информации в прямой код 16. Выход второго преобразователя цифровой информации в прямой код 16 соединен с одним из входов шестого двоичного умножителя 14. При отсутствии сигнала с цифрового устройства для измерения угловой скорости 12 на входы первого реверсивного двоичного счетчика 4 и второго реверсивного двоичного счетчика 9 поступают сигналы, пропорциональные интегралу выходных сигналов с первого цифрового устройства для измерения ускорений 1 и второго цифрового устройства для измерения ускорений 13. При наличии угловой скорости движения объекта γ' (измерение угловой скорости осуществляется цифровым устройством для измерения угловой скорости 12) для реализации датчика угла крена необходимо на входы первого реверсивного двоичного счетчика 4 и второго реверсивного двоичного счетчика 9 подать сигналы, пропорциональные X⋅dγ/dt на вход второго реверсивного двоичного счетчика 9 и Y⋅dγ/dt на вход первого реверсивного двоичного счетчика 4. Для реализации произведения X⋅dγ/dt и Y⋅dγ/dt, в систему введены перекрестные связи с выхода первого реверсивного двоичного счетчика 4 на вход второго реверсивного двоичного счетчика 9 через двоичные умножители 7 и 8, и с выхода второго реверсивного двоичного счетчика 9 на вход первого реверсивного двоичного счетчика 4 через двоичные умножители 10 и 11. Управление двоичными умножителями 8 и 11 осуществляется цифровым устройством для измерения угловой скорости 12. Предлагаемый датчик угла крена позволяет подавать на входы реверсивных двоичных счетчиков 4 и 9 интегралы входных сигналов X и Y в подвижной системе координат.
(f - частота генератора вспомогательной частоты 3, n - разрядность первого двоичного умножителя 2). Для разделения во времени поступления сигналов с двоичных умножителей прямых каналов и перекрестных связей, генератор вспомогательной частоты 3 вырабатывает две серии тактирующих импульсов, которые поступают на вход синхронизации первого двоичного умножителя 2. Выходной сигнал с первого двоичного умножителя 2 поступает на один из входов первого реверсивного двоичного счетчика 4, который осуществляет подсчет импульсов с первого двоичного умножителя 2 (т.е. интегрирование). Выходной сигнал с первого реверсивного двоичного счетчика 4 поступает на вход первого итогового регистра 5, выход которого соединен с входом первого преобразователя цифровой информации в прямой код 6. Сигнал с выхода первого преобразователя цифровой информации в прямой код 6 поступает на один из входов первого двоичного умножителя 2. В реверсивном двоичном счетчике 4 формируется цифровой опрашиваемый сигнал. Аналогичным образом работает второй прямой канал при действии линейного ускорения вдоль поперечной оси Y, состоящий из второго цифрового устройства для измерения ускорений 13, шестого двоичного умножителя 14, второго реверсивного двоичного счетчика 9 и второго итогового регистра 15, выход которого соединен с входом второго преобразователя цифровой информации в прямой код 16. Выход второго преобразователя цифровой информации в прямой код 16 соединен с одним из входов шестого двоичного умножителя 14. При отсутствии сигнала с цифрового устройства для измерения угловой скорости 12 на входы первого реверсивного двоичного счетчика 4 и второго реверсивного двоичного счетчика 9 поступают сигналы, пропорциональные интегралу выходных сигналов с первого цифрового устройства для измерения ускорений 1 и второго цифрового устройства для измерения ускорений 13. При наличии угловой скорости движения объекта γ' (измерение угловой скорости осуществляется цифровым устройством для измерения угловой скорости 12) для реализации датчика угла крена необходимо на входы первого реверсивного двоичного счетчика 4 и второго реверсивного двоичного счетчика 9 подать сигналы, пропорциональные X⋅dγ/dt на вход второго реверсивного двоичного счетчика 9 и Y⋅dγ/dt на вход первого реверсивного двоичного счетчика 4. Для реализации произведения X⋅dγ/dt и Y⋅dγ/dt, в систему введены перекрестные связи с выхода первого реверсивного двоичного счетчика 4 на вход второго реверсивного двоичного счетчика 9 через двоичные умножители 7 и 8, и с выхода второго реверсивного двоичного счетчика 9 на вход первого реверсивного двоичного счетчика 4 через двоичные умножители 10 и 11. Управление двоичными умножителями 8 и 11 осуществляется цифровым устройством для измерения угловой скорости 12. Предлагаемый датчик угла крена позволяет подавать на входы реверсивных двоичных счетчиков 4 и 9 интегралы входных сигналов X и Y в подвижной системе координат.
Введение в структуру датчика угла крена двух прямых каналов и двух перекрестных связей между каналами позволяет повысить точность определения угла крена вращающегося объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угла крена для вращающегося объекта | 2023 |
|
RU2811808C1 |
| Устройство для измерения ускорений | 2022 |
|
RU2793846C1 |
| Устройство для измерения ускорений | 2020 |
|
RU2750531C1 |
| Устройство для измерения ускорений | 2020 |
|
RU2740875C1 |
| Компенсационный акселерометр | 2019 |
|
RU2708716C1 |
| Устройство для измерения ускорений | 2022 |
|
RU2783223C1 |
| СИСТЕМА КОРРЕКЦИИ | 2005 |
|
RU2282148C1 |
| Компенсационный акселерометр | 2021 |
|
RU2756937C1 |
| Устройство для измерения ускорений | 2021 |
|
RU2780407C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2005 |
|
RU2279093C1 |
Изобретение предназначено для применения в качестве элемента в системах стабилизации и навигации. Датчик угла крена для вращающегося объекта содержит устройства для измерения ускорений, оси чувствительности которых взаимно ортогональны и перпендикулярны продольной оси вращения объекта, датчик угловой скорости, два канала и две перекрестные связи. Первый канал реализован от первого цифрового устройства для измерения ускорений к первому преобразователю цифровой информации в прямой код через последовательно соединенные по информационным входам первый двоичный умножитель, первый реверсивный двоичный счетчик, итоговый регистр первого реверсивного двоичного счетчика. Второй канал реализован от второго цифрового устройства для измерения ускорений к второму преобразователю цифровой информации в прямой код через последовательно соединенные по информационным входам шестой двоичный умножитель, второй реверсивный двоичный счетчик, итоговый регистр второго реверсивного двоичного счетчика. Кроме того, одна перекрестная связь реализована с выхода первого реверсивного двоичного счетчика на вход второго реверсивного двоичного счетчика второго канала через второй и третий двоичные умножители, вторая перекрестная связь реализована с выхода второго реверсивного двоичного счетчика на вход первого реверсивного двоичного счетчика первого канала через четвертый и пятый двоичные умножители. Технический результат - повышение точности измерения угла крена вращающегося объекта. 1 ил.
Датчик угла крена для вращающегося объекта, содержащий устройства для измерения ускорений, оси чувствительности которых взаимно ортогональны и перпендикулярны продольной оси вращения объекта, датчик угловой скорости, отличающийся тем, что в него введены два канала и две перекрестные связи, причем первый канал реализован от первого цифрового устройства для измерения ускорений к первому преобразователю цифровой информации в прямой код через последовательно соединенные по информационным входам первый двоичный умножитель, первый реверсивный двоичный счетчик, итоговый регистр первого реверсивного двоичного счетчика, второй канал реализован от второго цифрового устройства для измерения ускорений к второму преобразователю цифровой информации в прямой код через последовательно соединенные по информационным входам шестой двоичный умножитель, второй реверсивный двоичный счетчик, итоговый регистр второго реверсивного двоичного счетчика, кроме того, одна перекрестная связь реализована с выхода первого реверсивного двоичного счетчика на вход второго реверсивного двоичного счетчика второго канала через второй и третий двоичные умножители, вторая перекрестная связь реализована с выхода второго реверсивного двоичного счетчика на вход первого реверсивного двоичного счетчика первого канала через четвертый и пятый двоичные умножители, причем третий и пятый двоичные умножители соединены с цифровым устройством для измерения угловой скорости, дополнительные входы первого, второго, четвертого, шестого двоичных умножителей соединены с выходом генератора вспомогательной частоты, кроме того, выход первого преобразователя цифровой информации в прямой код соединен с одним из входов первого двоичного умножителя, выход второго преобразователя цифровой информации в прямой код соединен с одним из входов шестого двоичного умножителя, и выходы с первого и второго реверсивных двоичных счетчиков являются дискретными выходами датчика угла крена.
| СИДЕНЬЕ С ПОВОРОТНОЙ СПИНКОЙ | 0 |
|
SU143669A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КРЕНА ВРАЩАЮЩЕГОСЯ ПО КРЕНУ ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2527369C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |
| US 9040885 B2, 26.05.2015. | |||

