Предлагаемое изобретение относится к области измерительной техники и может быть использовано для определения угловых координат (угла рассогласования и угла фазирования) излучающих точечных объектов.
Известны устройства для определения координат точечных целей /1, 2/, основанные на принципах непрерывной и импульсной модуляции оптического излучения целей, в которых в качестве анализатора изображения цели используются различные модулирующие диски, растры, служащие для анализа картинной плоскости (плоскости изображений) и определения координат изображения цели.
Однако указанные устройства имеют ряд недостатков. В координаторе с частичной модуляцией недостатком является то, что он фиксирует наличие только угла рассогласования, так как реагирует на смещение изображения цели вдоль одной из координатных осей. Для того, чтобы координатор реагировал на изменение составляющих угла рассогласования в двух плоскостях управления, необходимо при одном приемнике излучения - два модулирующих диска, а это увеличивает размеры всей системы, делает конструкцию громоздкой.
В координаторах цели, основанных на амплитудно-фазовом принципе /1, 2/, недостатком является то, что с увеличением угла рассогласования цели появляется вариация несущей частоты, которая используется для введения автоматического регулирования усилителя системы.
Координаторы цели, основанные на фазовом принципе модуляции /1, 2/ также имеют существенный недостаток - сигналы, поступающие на приемник излучения, зависят только от направления рассогласования и не зависят от величины рассогласования, причем необходимо применение в конструкции сложной электронной схемы обработки выходного сигнала.
Кроме того, известно устройство /3/, являющееся прототипом предлагаемого изобретения, основанное на амплитудно-фазовом принципе определения координат точечной цели. В координаторе цели, основанном на данном принципе используется фазовый детектор и анализатор изображений (модулирующий диск), выполненный из оптического материала, прозрачность которого изменяется по линейному закону вдоль линии, проходящей через центр диска. Для этого его покрывают пленкой, имеющей различную прозрачность или придают сечению диска форму клина. Кроме того, на диске, вращающемся со скоростью n, имеется k прозрачных и непрозрачных секторов. При расположении цели на оси координата (угол рассогласования равен нулю) изображение цели находится в центре модулирующего диска и модуляция отсутствует. Если изображение цели смещается от центра, поток оптического излучения модулируется с частотой Fнес = k • n. Кроме того, благодаря неравномерной прозрачности диска поток дополнительного модулируется с частотой fогиб = n. Модулированный поток оптического излучения попадает на приемник излучения, сигнал с которого попадает на вход резонансного усилителя, настроенного на несущую частоту fнес, а мгновенное значение сигнала U определяется зависимостью:
где m = (Umax - Umin)/Umax - глубина модуляции сигнала, определяемая положением изображения цели в фокальной плоскости объектива координатора (углом рассогласования);
ω = 2πfнес;
Ω = 2πfогиб.
Сигнал U детектируется и из него выделяется сгибающая частота fогиб, амплитуда Uc которого пропорциональна углу рассогласования, а фаза - углу фазирования.
Однако в указанном устройстве имеется существенный недостаток - небольшое число анализируемых параметров цели, необходимых для ее идентификации в условиях наличия ложных целей, угловые размеры, спектр и уровень оптического излучения которых соизмеримы с таковыми для реальных целей.
Задачей предлагаемого изобретения является увеличение числа определяемых информативных параметров точечных объектов.
Поставленная задача достигается за счет того, что в известном устройстве (см. /3/), содержащем объектив и окуляр телескопической системы, анализатор изображений, конденсор, приемник излучения и электронную схему обработки сигналов согласно изобретению анализатор изображений выполнен в виде 2-х линейных поляризаторов, причем 1-й поляризатор выполнен в виде 3-х полосок поляризационной пленки, нанесенных на вращающуюся клиновую пластину вдоль ее радиуса через 45o, а 2-й поляризатор установлен неподвижно.
Ширина каждой из 3-х полосок поляризационной пленки определяется диаметром аберрационного пятна рассеяния объектива координатора.
В предлагаемом устройстве проявляется новое техническое свойство, заключающееся в том, что угловые координаты цели (углы рассогласования и фазирования) определяются с использованием только анализатора изображений, что обуславливает положительный эффект, состоящий в определении угловых координат точечных целей без фазового детектора.
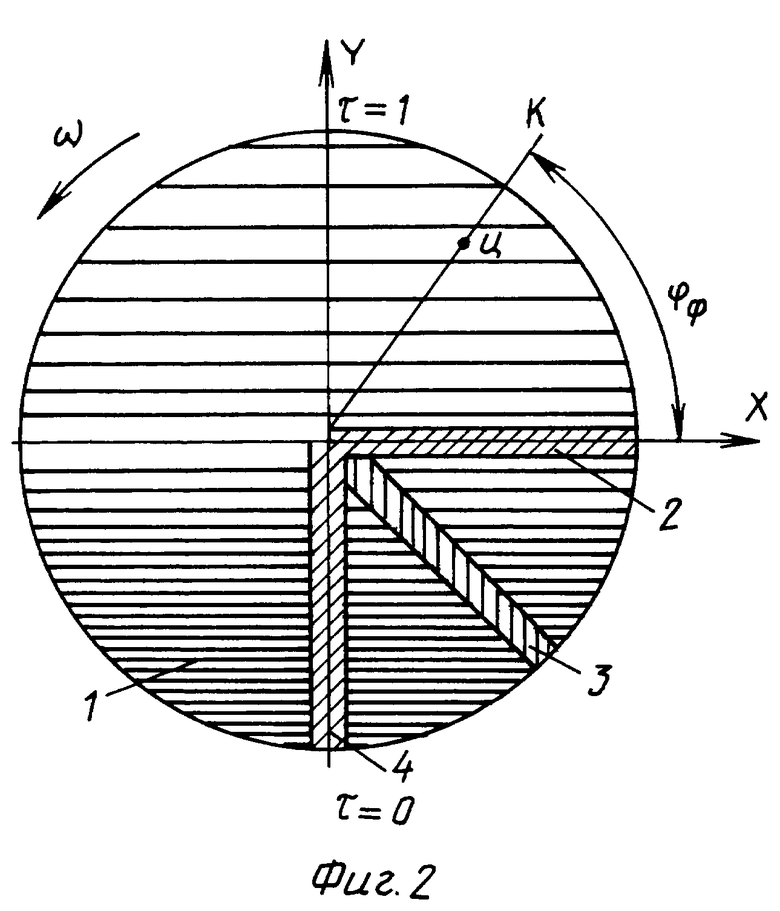
На фиг. 1 приведена схема оптико-электронного координатора, где приняты следующие обозначения: 1 - обтекатель; 2 - объектив телескопической системы; 3 - отражатель; 4 - 1-ый поляризатор с клиновой пластиной; 5 - окуляр телескопической системы; 6 - 2-ой поляризатор; 7 - конденсор; 8 - приемник оптического излучения. Элементы 4 и 6 составляют поляризационный анализатор изображений.
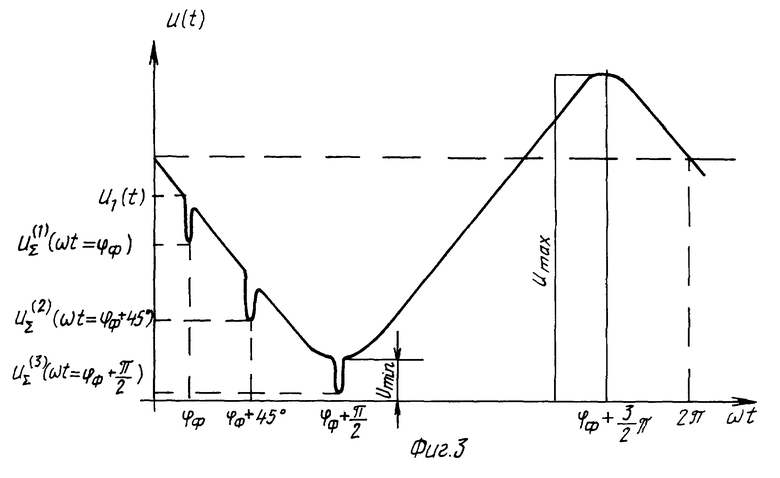
На фиг. 2 приведена конструкция 1-го поляризатора, состоящего из 3-х полосок поляризационной пленки, нанесенных на клиновую пластину вдоль ее радиуса через 45o.
На фиг. 3 приведена форма выходного сигнала приемника излучения за один полный оборот клиновой пластины.
Согласно фиг. 2 поляризационные полоски ориентированы следующим образом: 1-я, 2-я и 3-я поляризационные полоски составляют соответственно углы 90o, 135o, 180o с вектором градиента оптической плотности клиновой пластины (ось OY на фиг. 2). При этом азимуты поляризации 1-й, 2-й и 3-ей полосок также составляют соответственно угол 90o, 135o, 180o с вектором градиента оптической плотности клиновой пластины.
Формирование рабочих сигналов осуществляется следующим образом (см. фиг. 1). Оптическое излучение от объекта, пройдя обтекатель 1, попадает на объектив 2 и направляется на отражатель 3. От отражателя излучение проходит вращающийся поляризатор 4 с клиновой пластиной, затем окуляр 5, который формирует параллельный пучок. В этом пучке находится 2-ой поляризатор 6. После него излучение конденсором 7 собирается на приемнике излучения 8, где преобразуется в электрический сигнал.
Для определения угла рассогласования ϕ воспользуемся результатами работы /4/, согласно которой поток излучения, прошедший через вращающуюся клиновую пластину имеет вид:
Φ(t) = 0,5Φo[1-(ρ/R)sin(ωt-ϕф)], (1)
где Фо - энергетический поток излучения от цели;
ρ - координата цели, характеризующая угол рассогласования;
R - радиус клиновой пластины;
ϕф - угол фазирования цели.
В момент времени, когда 1-я полоска поляризатора находится вне линии ОК (см. фиг. 2), соединяющий центр поля зрения с изображением цели, то сигнал имеет вид:
где τo - коэффициент пропускания оптических элементов координатора;
τa - тоже для слоя атмосферы между объектом и координатором;
P и δ - соответственно степень и азимут поляризации излучения цели;
τп - коэффициент пропускания поляризатора 6;
S - чувствительность приемника излучения.
Из выражения (2) максимальный сигнал равен:
При этом учли, что
(ωt-ϕф) = 3π/2.
Соответственно минимальный сигнал без поляризатора 4 равен
учитывая, что (ωt-ϕф) = π/2,
а также тот факт, что линия OK находится вблизи, но вне 3-й полоски поляризатора 4, то есть выполняется условие
ωt ≈ ϕф+π/2.
Глубина модуляции определяется по следующей формуле:
m = (Umax - Umin)/(Umax + Umin).
Подставив в формулу (5) выражения (3) и (4), получим значение величины
ρ = mR, (6)
которая определяет угол рассогласования.
Для определения угла фазирования рассмотрим суммарное действие поляризационного анализатора и оптической системы, в результате которого получаем сигнал с приемника излучения, показанный на фиг. 3.
В момент времени, когда 1-я полоска поляризатора 4 находится вне линии ОК (см. фиг.2), сигнал имеет вид:
а в момент времени tc1 совпадения с линией OK 1-ой полоски поляризатора 4 суммарный сигнал равен:
Аналогично в моменты времени tc2 и tc2 совпадения с линией OK соответственно 2-ой и 3-ей полосок поляризатора 4 суммарные сигналы соответственно будут равны:
Исходя из фиг. 2 и 3 приведенных в описании заявки на предлагаемое изобретение, моменты времени tc1, tc2 и tc3, когда следует производить измерение соответственно сигналов U
tc1 = tmax + T/4; (11)
tc2 = tmax + 3T/8; (12)
tc3 = tmax + T/2, (13)
где T - период вращения клиновой пластины;
tmax - момент времени появления максимального сигнала Umax.
Решением системы 3-х уравнений (8-10), где неизвестными являются P, δ и ϕф определяется угол фазирования, как 2-ая координата, а также степень P и азимут δ поляризации излучения цели как дополнительная информация:
Так как получена информация о степени P и азимуте δ излучения цели, то эта дополнительная информация позволяет идентифицировать истинные цели от ложных, чем и обуславливается повышение информативных параметров точечных целей.
Таким образом поставленная задача для устройства выполняется за счет нового признака: анализатор изображений выполняется в виде 2-х линейных поляризаторов, причем 1-ый поляризатор выполнен в виде 3-х полосок поляризационной пленки, нанесенных на вращающуюся клиновую пластину вдоль ее радиуса через 45o, а второй поляризатор установлен неподвижно.
Источники информации, принятые во внимание при экспертизе
1. Инфракрасные и световые приборы самонаведения летательных аппаратов. Изд. 2-е Лазарев Л.П., М., "Машиностроение", 1970 г., с. 391...445. - аналог.
2. Инфракрасные системы обнаружения, пеленгации и автоматического сопровождения движущихся объектов. Криксунов Л.З., Усольцев И.Ф., М., "Советское радио", 1968 г., с. 157...239. - аналог.
3. Инфракрасные системы обнаружения, пеленгации и автоматического сопровождения движущихся объектов. Криксунов Л.З., Усольцев И.Ф., М., "Советское радио", 1968 г., с. 176...179. - прототип.
4. Теоретические основы оптико-электронных приборов: Учебное пособие для приборостроительных ВУЗов. Мирошников М.М. - 2-е изд., перераб. и допол. - Л., Машиностроение, Ленингр. отд-ние, 1983. - 696 с., ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТЕПЛОВИЗИОННОГО РАСПОЗНАВАНИЯ ФОРМЫ ОБЪЕКТОВ | 1995 |
|
RU2141735C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОРОГА СТЕРЕОСКОПИЧЕСКОГО ЗРЕНИЯ | 1995 |
|
RU2110206C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2011 |
|
RU2469265C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ КООРДИНАТНОЙ И НЕКООРДИНАТНОЙ ИНФОРМАЦИИ О ТОЧЕЧНЫХ ОБЪЕКТАХ | 2007 |
|
RU2373493C2 |
| СПОСОБ ТЕПЛОВИЗИОННОГО РАСПОЗНАВАНИЯ ФОРМЫ ОБЪЕКТОВ | 2010 |
|
RU2431936C1 |
| СПОСОБ ИНТЕРФЕРЕНЦИОННОГО ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ ОПТИЧЕСКИХ ДЕТАЛЕЙ | 1998 |
|
RU2166730C2 |
| УСТРОЙСТВО ДЛЯ ПОВЕРКИ НИВЕЛИРА | 1995 |
|
RU2093794C1 |
| ПИРОМЕТР ИСТИННОЙ ТЕМПЕРАТУРЫ | 2002 |
|
RU2219504C2 |
| СПОСОБ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 2009 |
|
RU2410654C1 |
| ТЕЛЕСКОПИЧЕСКАЯ СИСТЕМА ГАЛИЛЕЯ | 1996 |
|
RU2109312C1 |
Изобретение относится к измерительной технике. Технический результат - увеличение числа определяемых информативных параметров точечных объектов. Оптико-электронный координатор, содержащий объектив и окуляр телескопической системы, анализатор изображений, конденсор и приемник излучения. Новым решением в изобретении является поляризационный анализатор изображений, состоящий из 2 линейных поляризаторов, причем первый поляризатор выполнен в виде 3 полосок поляризационной пленки, нанесенных на вращающуюся клиновую пластину через 45o, а второй поляризатор установлен неподвижно. 3 ил.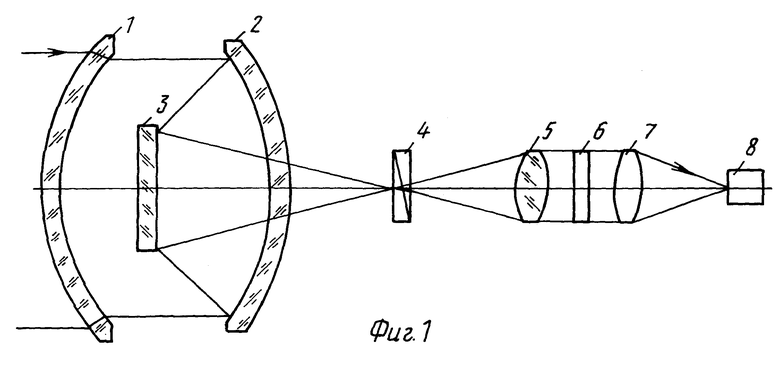
Оптико-электронный координатор, содержащий обтекатель, оптическое излучение после которого проходит объектив и окуляр телескопической системы, анализатор изображений, конденсор и попадает на приемник излучения, отличающийся тем, что анализатор изображений выполнен в виде 2 линейных поляризаторов, причем первый выполнен в виде 3 полосок поляризационной пленки, нанесенных на вращающуюся клиновую пластину вдоль ее радиуса через 45o, а второй поляризатор установлен неподвижно.
| Криксунов Л.З., Усольцев И.Ф | |||
| Инфракрасные системы обнаружения, пеленгации и автоматического сопровождения движущихся объектов | |||
| - М.: Сов.радио, 1968, с.176 - 179 | |||
| DE 3744051 A, 06.07.89 | |||
| СПОСОБ ПОЛУЧЕНИЯ НЕКУРИТЕЛЬНОГО ИЗДЕЛИЯ ИЗ МАХОРКИ | 2010 |
|
RU2433760C1 |
| ПРОТИВОВИРУСНОЕ ОДНОДОМЕННОЕ МИНИ-АНТИТЕЛО, НУКЛЕОТИДНАЯ ПОСЛЕДОВАТЕЛЬНОСТЬ, ЭКСПРЕССИРУЮЩИЙ РЕКОМБИНАНТНЫЙ ВИРУСНЫЙ ВЕКТОР, ФАРМАЦЕВТИЧЕСКАЯ КОМПОЗИЦИЯ И СПОСОБ ПРОФИЛАКТИКИ ИЛИ ТЕРАПИИ ГРИППА ТИПА А | 2013 |
|
RU2536956C1 |
| Шумоизоляционная древесная панель | 2024 |
|
RU2829277C1 |
| Модулирующее устройство для фотоэлектрической следящей системы | 1975 |
|
SU525904A1 |
| Сканирующий растр фотоэлектрического координатора | 1976 |
|
SU561162A1 |
