Изобретение относится к вибросейсмической технике, а именно к устройствам питания и управления электромагнитным молотом двойного действия, входящим в состав виброисточника.
Методы вибросейсмического воздействия на призабойные зоны скважин известны уже более 30 лет, широко распространены и положительно себя зарекомендовали.
Вибровоздействие осуществляют при помощи наземных виброплатформ, скважинных виброизлучателей длительного действия, главным образом механических, пневматических или гидравлических.
Известна система питания и управления скважинного сейсмического источника, содержащего силовой элемент в виде гидроцилиндра с изменяемым диаметром, снабженного плунжером, взаимодействующим с механизмом его возвратно-поступательного перемещения вдоль оси гидроцилиндра (патент РФ №2452853, МПК Е21В 43/25, опубл. 10.06.2012 г., бюл. №16).
Известное устройство, в составе подвижной части механизма возвратно-поступательного перемещения, каната, груза с плунжером гидроцилиндра с изменяемым диаметром является сложной многомассовой системой с упруго-диссипативными связями в виде каната, упругой подвески и рабочей жидкости внутри гидроцилиндра.
К недостаткам данного устройства следует отнести сложность настройки на оптимально необходимый режим колебаний.
Наиболее близким к предлагаемому изобретению является блок питания и управления сейсмоисточника по патенту РФ №2642199 (МПК Е21В 43/25, опубл. 24.01.2018, бюл. №3) включающий тиристорный коммутатор с тиристорами, в цепи которого включены электромагнитные катушки прямого и обратного хода бойка. Коммутатор включает узел гашения, состоящий из резистора, емкости, диодов и коммутирующей емкости.
К недостаткам данного устройства следует отнести то, что по сигналу с датчика нижнего положения бойка включается катушка обратного хода и выключается катушка прямого хода. По сигналу с датчика верхнего положения бойка включается катушка прямого хода и выключается катушка обратного хода. Так осуществляется управление работой молота виброисточника в прототипе.
Данная схема управления является очень устойчивой и широко применяется в электромагнитных молотах, работающих на поверхности. Однако она требует дополнительного кабеля управления, соединяющего систему питания и управления (СПУ) с индуктивными датчиками положения бойка. Это имеет большой недостаток при работе в нефтяной скважине, поскольку сильно увеличивает длительность и трудоемкость спуско-подъемных операций и стоимость работ из-за существенной стоимости кабеля управления большой длины, которая должна быть не менее глубины залегания пласта и входить в состав стоимости виброисточника.
Задача (технический результат) предлагаемого изобретения заключается в снижении стоимости виброисточника и трудоемкости, а значит и стоимости выполняемых работ.
Поставленная задача решается тем, что система питания и управления электромагнитным молотом двойного действия, входящим в состав виброисточника, включает управляемый выпрямитель (УВ), подключенный к трехфазной сети переменного тока, к выходу УВ подключен тиристорный коммутатор, в состав которого входит узел гашения, состоящий из резистора, емкости и диодов, коммутирующую емкость и блок управления. Согласно предлагаемому изобретению блок управления представляет собой блок анализа токов (БА), выполненный в виде двух каналов управления коммутирующими элементами коммутатора, каждый из которых включает в себя последовательно соединенные корректирующее устройство (КУ), микроконтроллер (МК), компаратор (К), инвертор (И) и усилитель (У). Выходы каждого из каналов соединены с управляющими электродами тиристоров VT1 и VT2 коммутатора, в плечи которого последовательно с катушками Lпх прямого и Lox обратного хода электромагнитного молота включены датчики тока соответственно ДТ1 и ДТ2, формирующие сигналы, пропорциональные величине тока в катушках Lпx, Lox; сигналы от датчиков тока ДТ1 и ДТ2 поступают на вход БА.
Предлагаемая совокупность существенных признаков позволит для переключения катушек электромагнитного молота использовать импульсы производной тока в катушке при подходе бойка к полюсу. При этом не требуется дополнительный кабель управления, соединяющий систему питания и управления с индуктивными датчиками положения бойка.
Предлагаемое изобретение поясняется фигурами, где на фиг. 1 представлен скважинный сейсмоисточник с заявляемой системой питания и управления в разрезе; на фиг. 2 - схема заявляемой системы питания и управления; на фиг. 3 - кривая тока в одной из катушек электромагнитного молота во время рабочего цикла; на фиг. 4 представлены кривые токов катушек электромагнитного молота, регистрируемые датчиками тока; на фиг. 5 - фотография испытаний в стендовой скважине.
Заявляемая система питания и управления (СПУ) электромагнитным молотом двойного действия, входящим в состав виброисточника, включает управляемый выпрямитель (УВ) 1, подключенный к трехфазной сети переменного тока, позволяющий изменять величину напряжения, подаваемого на каждую катушку виброисточника углами регулирования выходного напряжения УВ 1, подаваемого на катушки прямого и обратного хода соответственно αnx, αox; выход УВ 1 подключен к коммутатору, в каждом из двух плеч которого последовательно включены датчики тока (ДТ) и управляющие тиристоры (VT), соответственно 2, 3 и 4, 5, причем входы ДТ 2 и 4 подключены к положительному выходу УВ 1, а катоды тиристоров 3 и 5 подключены к отрицательному выходу УВ 1. Узел гашения, состоит из резистора 6, емкости 7 и диодов 8, 9. Узел коммутации 10 включен между управляющими тиристорами 3 и 5. Узел гашения включен между анодами управляющих тиристоров 3 и 5 и положительным выходом УВ 1. Блок анализа токов (БА) выполнен в виде двух каналов управления коммутирующими элементами коммутатора, каждый из которых включает в себя последовательно соединенные корректирующее устройство (11 и 12), микроконтроллер (13 и 14), компаратор (15 и 16), инвертор (17 и 18) и усилитель (19 и 20). На входы каждого из каналов БА поступают сигналы от датчиков тока соответственно 2 и 4, пропорциональные величине тока в катушках соответственно прямого 21, и обратного 22 хода. Выходы каждого из каналов соединены с управляющими электродами тиристоров 3 и 5 коммутатора.
Все элементы заявляемой СПУ известны и широко используются. Так, например, МК могут быть выполнены в виде микропроцессоров STM32F429ZIT6 или STM32F746ZGT6.
Предлагаемая система работает следующим образом.
Подключают силовой кабель 23 к катушкам 21 и 22 электромагнитного молота и опускают виброисточник в скважину. На поверхности устанавливают заявляемую СПУ и подключают посредством силового кабеля 23 катушки электромагнитного молота прямого 21 и обратного 22 хода к СПУ так, чтобы катушки были последовательно соединены с датчиками тока соответственно 2 и 4. Подают питание на УВ 1 и включают в работу электромагнитный молот.
Под действием переключающихся катушек боек 24 совершает возвратно-поступательное движение, нанося своими торцами удары по плунжерам силовых элементов 25, 26. При этом кривые токов катушек, регистрируемые датчиками токов 2, 4, имеют форму, представленную на фиг. 3. На ней можно видеть следующие характерные зоны:
- зона молчания, когда катушка отключена и ток в ней не протекает;
- зона нарастания тока при включении, она характеризуется высоким значением производной от тока (скорости изменения тока во времени) в катушках di/dt>2100 А/с;
- рабочая зона, ток в этой зоне либо падающий, либо близок к постоянному;
- зона подхода бойка к полюсу и удара по плунжеру силового элемента, когда ток, если катушка не отключена, начинает нарастать, стремясь к Iycт=U/Rкат, где Iуст - установившийся ток, U - напряжение, подаваемое на катушку, Rкат - активное сопротивление катушки, как показано пунктирной линией на кривой фиг. 3. Это зона с низким значением di/dt<110 А/с. Задача предлагаемого технического решения - выявление начала нарастания тока катушки электромагнитного молота на ранней стадии и выполнение ее переключения;
- зона гашения, когда катушка отключается и переходит в зону молчания.
Сигналы с датчиков тока поступают через корректирующее устройство 11 или 12 на МК соответственно 13 или 14, который выделяет в них зоны нарастания. На выходе с МК 13 или 14 сигнал поступает на корректирующее устройство КУ соответственно 15 или 16.
Рассмотрим более подробно работу устройства во временном интервале на границе между зонами 3 и 4, выделенными на фиг. 3, которая соответствует моменту удару бойка 24 по плунжеру 25 или 26. Зона 4 описывает процесс вдавливания плунжера 25 или 26 в камеру силового элемента 27 или 28. Следовательно, именно в этот промежуток времени должно происходить срабатывание имитаторов датчиков положения бойка 24. Для выявления этого момента, предлагается использовать цифровой анализ кривой тока. На фиг.2 показан общий вид системы питания и управления скважинным виброисточником, включающей блок анализа токов БА. Его работа происходит следующим образом.
Датчики тока 2, 4 имеют внутреннюю усилительную схему. Поэтому, если подать сигнал с датчика тока катушки непосредственно на вход АЦП микроконтроллера МК 13, 14, то он может выйти из строя. Для защиты АЦП применяется аналоговое корректирующее устройство (КУ) 11, 12 на базе операционного усилителя, вычитающее из сигнала датчика тока некоторое постоянное напряжение. В результате, форма сигнала не искажается, а амплитуда значительно снижается. Результат обработки сигнала с датчика тока 2, 4 корректирующим устройством КУ 11, 12 поступает на один из каналов АЦП микроконтроллера МК 13, 14.
Цифровое дифференцирование сигналов с датчиков токов 2, 4 после их обработки в блоке КУ 11, 12 осуществляется МК 13, 14 с определением знака и величины производной по времени. Участок постоянного тока или спадания тока в каждом импульсе тока (участок 3, согласно фиг. 3) всего один, он исключается из анализа микроконтроллером МК. Участков нарастания тока в каждом импульсе всего два (участки 2, 4, согласно фиг. 3). Результаты дифференцирования поступают на соответствующие входы компараторов 15 и 16. Компараторы 15, 16 сравнивают полученные величины производных от изменения токов катушек с эталонной величиной di/dt|t0, характерной только для рабочего интервала t0 (участок 4, фиг. 3). Физика работы компаратора такова, что он выдает сигнал логической единицы при обнаружении сигнала с большей производной по времени, чем эталон. Поэтому, сигналы с выходов компараторов поступают на логические инверторы 17 и 18. Инверторы 17, 18 инвертируют сигналы компараторов таким образом, что схема БА в целом выдает импульсы в момент совпадения производной сигнала с датчика тока эталону di/dt|t0 зоны 4, то есть в моменты удара бойка по плунжеру. Полученные импульсы поступают на усилители 19 и 20. С усилителей 19 и 20 управляющие импульсы Р1, Р2 поступают на тиристоры коммутатора 3 и 5, которые переключают катушки 21, 22 электромагнитного молота в моменты подхода торцев бойка 24 к полюсам 29, 30 и ударов по плунжерам соответственно 25, 26. Токи катушек iох, inр и импульсы датчиков Р1, Р2 показаны на фиг. 4. При этом боек 24 молота совершает возвратно-поступательное движение, нанося удары по плунжерам 25, 26 силовых элементов 27, 28. Через обсадную колонну в пласт излучается сейсмический сигнал. Таким образом осуществляется управление электромагнитным молотом виброисточника от его собственных электромагнитных катушек вместо датчиков положения. Питание виброисточника при этом осуществляется только от одного трехжильного силового кабеля, кабель управления отсутствует. За счет этого обеспечивается существенная экономия при работе виброисточника на скважине.
Промышленная применимость предлагаемого изобретения подтверждается стендовыми испытаниями, которые показали надежность работы виброисточника в стендовой скважине при использовании предлагаемой СПУ за счет питания и управления электромагнитным молотом только по силовому кабелю, без использования датчиков положения молота.
| название | год | авторы | номер документа |
|---|---|---|---|
| Скважинный сейсмоисточник | 2020 |
|
RU2753805C1 |
| СКВАЖИННЫЙ СЕЙСМОИСТОЧНИК | 2017 |
|
RU2642199C1 |
| Линейный электропривод | 1983 |
|
SU1138917A1 |
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2326480C1 |
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ ВРАЩАТЕЛЬНОГО ИЛИ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2011 |
|
RU2460190C1 |
| Устройство управления работой электромагнитного молота | 1985 |
|
SU1390352A1 |
| Электромагнитный молот | 1970 |
|
SU497405A1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 2009 |
|
RU2410813C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО ВЕНТИЛЬНОГО ДВИГАТЕЛЯ НА ОСНОВЕ ЯВНОПОЛЮСНОЙ СИНХРОННОЙ МАШИНЫ | 2010 |
|
RU2435291C1 |
| Способ и устройство для расширения скоростного диапазона и обеспечения живучести трехфазного вентильного электродвигателя | 2022 |
|
RU2790625C1 |
Изобретение относится к вибросейсмической технике. Система питания и управления электромагнитным молотом двойного действия, входящим в состав виброисточника, включает управляемый выпрямитель (УВ), подключенный к трехфазной сети переменного тока, к выходу УВ подключен тиристорный коммутатор, в состав которого входит узел гашения, состоящий из резистора, емкости и диодов, коммутирующую емкость и блок управления. Блок управления представляет собой блок анализа токов (БА), выполненный в виде двух каналов управления коммутирующими элементами коммутатора, каждый из которых включает в себя последовательно соединенные корректирующее устройство (КУ), микроконтроллер (МК), компаратор (К), инвертор (И) и усилитель (У). Выходы каждого из каналов соединены с управляющими электродами тиристоров VT1 и VT2 коммутатора, в плечи которого последовательно с катушками Lпх прямого и Lox обратного хода электромагнитного молота включены датчики тока соответственно ДТ1 и ДТ2, формирующие сигналы, пропорциональные величине тока в катушках Lпx, Lox; сигналы от датчиков тока ДТ1 и ДТ2 поступают на вход БА. 5 ил.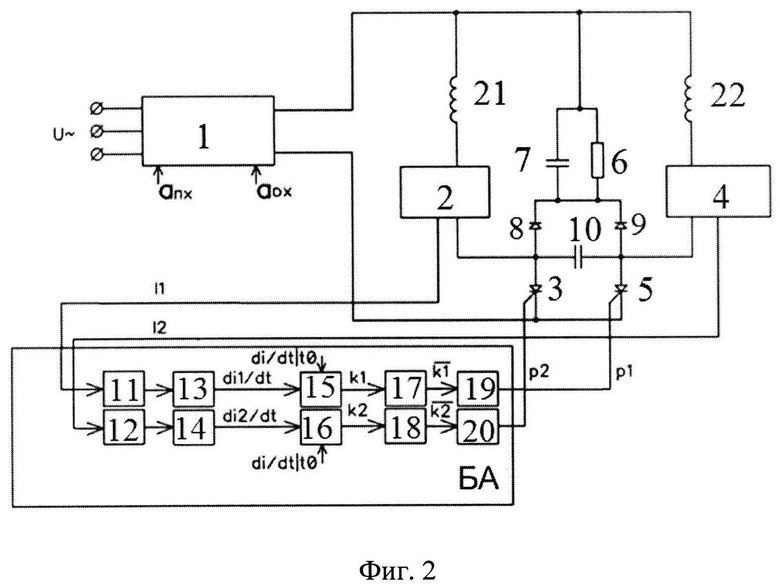
Система питания и управления электромагнитным молотом двойного действия, входящим в состав виброисточника, включающая управляемый выпрямитель (УВ), подключенный к трехфазной сети переменного тока, к выходу УВ подключен тиристорный коммутатор, в состав которого входит узел гашения, состоящий из резистора, емкости и диодов, коммутирующую емкость и блок управления, отличающаяся тем, что блок управления представляет собой блок анализа токов (БА), выполненный в виде двух каналов управления коммутирующими элементами коммутатора, каждый из которых включает в себя последовательно соединенные корректирующее устройство (КУ), микроконтроллер (МК), компаратор (К), инвертор (И) и усилитель (У); выходы каждого из каналов соединены с управляющими тиристорами VT1 и VT2 коммутатора, в плечи которого последовательно с катушками Lпх прямого и Lox обратного хода электромагнитного молота включены датчики тока соответственно ДТ1 и ДТ2, формирующие сигналы, пропорциональные величине тока в катушках Lпх, Lox; сигналы от датчиков тока ДТ1 и ДТ2 поступают на вход БА.
| СКВАЖИННЫЙ СЕЙСМОИСТОЧНИК | 2017 |
|
RU2642199C1 |
| СПОСОБ ВОЛНОВОГО ВОЗДЕЙСТВИЯ НА ЗАЛЕЖЬ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2452853C1 |
| Устройство для коммутации тока | 1979 |
|
SU792591A1 |
| US 3786278 A1, 15.01.1974 | |||
| US 4715470 A1, 29.12.1987 | |||
| US 5836389 A1, 17.11.1998. | |||

