Уровень техники
[0001] Внутрискважинные акустические обследования типично проводятся в нефтегазовой отрасли с целью определения скорости распространения продольной волны и скорости звука при сдвиге пласта, окружающего буровую скважину, как функции положения вдоль ствола буровой скважины и направления распространения. Следовательно, традиционные инструментальные средства внутрискважинного акустического обследования обычно оптимизируются для определения скорости распространения продольной волны и скорости звука при сдвиге пласта. Однако, внутрискважинные акустические инструментальные средства иногда проводятся для другой цели, а именно, формирующие изображения звуковые отражатели, расположенные в диапазоне от нескольких футов до нескольких десятков футов от буровой скважины. Эти звуковые отражатели могут быть литологическими границами, границами порового флюида и трещинами и разломами.
[0002] Хотя внутрискважинные звуковые обследования, предназначенные для изображения звуковых отражателей, могут проводиться с помощью традиционных инструментальных средств внутрискважинного звукового обследования, эти инструментальные средства не являются оптимизированными для выполнения этих обследований. В частности, они имеют ограниченную апертуру датчика и разнесение датчиков, которое может не быть оптимизировано для задачи формирования изображения звуковых отражателей, расположенных на расстояниях в несколько десятков футов от буровой скважины. По этой причине, устройство, и способ использования, оптимизированное для сопровождения звуковых отражателей для изображения, является давно назревшей необходимостью в нефтегазовой отрасли.
Сущность изобретения
[0003] Эта сущность предоставляется для введения выбора идей, которые далее описываются ниже в подробном описании. Эта сущность не предназначена, ни чтобы идентифицировать ключевые или неотъемлемые признаки заявленного предмета изобретения, ни чтобы использоваться как помощь в ограничении рамок заявленного предмета изобретения.
[0004] В общем, в одном аспекте, варианты осуществления относятся к системе, включающей в себя источник звука, развернутый в первой буровой скважине, и волоконно-оптический распределенный датчик, развернутый во второй буровой скважине, обе буровые скважины проходят от поверхности земли внутрь пласта месторождения. Оптическое волокно конфигурируется, чтобы реагировать по своей длине на падающие звуковые волны, формируемые источником звука и распространяющиеся через первую буровую скважину, через пласт месторождения и через вторую буровую скважину. Система дополнительно включает в себя оптический источник, чтобы направлять оптические импульсы внутрь волоконно-оптического распределенного датчика, в то время как звуковые волны падают на волоконно-оптический распределенный датчик. Система также включает в себя систему сбора данных, присоединенную к волоконно-оптическому распределенному датчику, чтобы обнаруживать временные изменения в когерентном рэлеевском шуме (CRN), создаваемом в волоконно-оптическом распределенном датчике в ответ на оптические импульсы и падающие звуковые волны; и компьютерную систему, сконфигурированную, чтобы принимать данные от системы сбора данных.
[0005] В общем, в одном аспекте, варианты осуществления относятся к развертыванию источника звука в первой буровой скважине, проходящей от поверхности внутрь пласта месторождения, и развертыванию волоконно-оптического распределенного датчика во второй буровой скважине, проходящей от поверхности земли внутрь пласта месторождения. Волоконно-оптический распределенный датчик конфигурируется, чтобы реагировать по своей длине на падающие звуковые волны, формируемые источником звука и распространяющиеся через первую буровую скважину, через пласт месторождения и через вторую буровую скважину. Способ дополнительно включает в себя направление, из оптического источника, оптических импульсов внутрь волоконно-оптического распределенного датчика, в то время как звуковые волны падают на волоконно-оптический распределенный датчик, и получение данных с помощью системы сбора данных, соединенной с волоконно-оптическим распределенным датчиком, чтобы обнаруживать временные изменения в когерентном рэлеевском шуме, формируемом в волоконно-оптическом распределенном датчике в ответ на оптические импульсы и падающие звуковые волны. Кроме того, способ включает в себя прием данных от системы сбора данных, при этом принятые данные используются посредством долговременного компьютерно-читаемого носителя, содержащего инструкции для выполнения инверсии принятых данных, чтобы определять звуковую характеристику пласта месторождения поблизости от источника звука и волоконно-оптического распределенного датчика.
[0006] Другие аспекты и преимущества заявленного предмета изобретения будут очевидны из последующего описания и прилагаемой формулы изобретения.
Краткое описание чертежей
[0007] Конкретные варианты осуществления раскрытой технологии будут сейчас описаны подробно со ссылкой на сопровождающие чертежи. Аналогичные элементы на различных чертежах обозначаются аналогичными номерами ссылок для согласованности.
[0008] Фиг. 1 показывает пример, в соответствии с одним или более вариантами осуществления.
[0009] Фиг. 2 показывает пример, в соответствии с одним или более вариантами осуществления.
[0010] Фиг. 3 показывает пример, в соответствии с одним или более вариантами осуществления.
[0011] Фиг. 4 показывает пример, в соответствии с одним или более вариантами осуществления.
[0012] Фиг. 5 показывает блок-схему последовательности операций, в соответствии с одним или более вариантами осуществления.
[0013] Фиг. 6 показывает блок-схему последовательности операций, иллюстрирующую полноволновую инверсию, в соответствии с одним или более вариантами осуществления.
[0014] Фиг. 7 показывает блок-схему последовательности операций, иллюстрирующую обратную временную миграцию, в соответствии с одним или более вариантами осуществления.
Подробное описание изобретения
[0015] В последующем подробном описании вариантов осуществления открытия, многочисленные конкретные детали излагаются для того, чтобы обеспечивать более полное понимание открытия. Однако, обычному специалисту в области техники будет понятно, что открытие может быть применено на практике без этих конкретных деталей. В других случаях, хорошо известные отличительные признаки не были описаны подробно, чтобы избегать ненужного усложнения описания.
[0016] На протяжении всей заявки, порядковые номера (например, первый, второй, третий и т.д.) могут быть использованы как прилагательное для элемента (т.е., любого существительного в заявке). Использование порядковых номеров не должно ни подразумевать или создавать какое-либо конкретное упорядочивание элементов, ни ограничивать какой-либо элемент только единственным элементом, пока явно не раскрыто, как, например, использование терминов "перед", "после", "единственный" и другая такая терминология. Скорее, использование порядковых номеров существует для различения между элементами. В качестве примера, первый элемент является отдельным от второго элемента, и первый элемент может охватывать более одного элемента и следовать за (или предшествовать) второму элементу в упорядоченном расположении элементов.
[0017] Варианты осуществления, раскрытые в данном документе, относятся к формированию изображения с высоким разрешением (несколько метров и менее), глубоким проникновением (несколько десятков футов и более) структуры пласта месторождения и определению ее количественных характеристик. Такое формирование изображения и определение характеристик может предоставлять возможность открытия запасов нефти (выклинивание), помогать в оптимизации создания и лучшем планировании и конструировании буровой скважины. Существующие инструментальные средства для формирования изображения пласта месторождения с помощью звуковых частот основываются на традиционных тросовых инструментальных средствах. Такие инструментальные средства проектируются с первичной целью измерения характеристик пласта месторождения, таких как его модули упругости, анизотропия, напряжение и т.д. Следовательно, разработка инструментальных средств, специально предназначенных и оптимизированных для глубоких звуковых измерений пласта месторождения является желательной.
[0018] В частности, традиционные тросовые инструментальные средства имеют ограниченное максимальное расстояние от источника до датчика типично примерно 15 футов или менее. Кроме того, традиционные тросовые инструментальные средства имеют ограниченную апертуру массива звуковых датчиков, определенную как расстояние между самым дальним датчиком от источника и датчиком, ближайшим к источнику. Типично, апертура массива звуковых датчиков может быть 6 футов или менее.
[0019] Максимальное расстояние приемника источника является важным, так как оно регулирует соответствующие времена приема отражений от структур пласта месторождения и формы волны, распространяющейся в буровой скважине. Часто, наибольший сигнал, регистрируемый в акустическом каротаже, является модой Стоунли, которая распространяется по буровой скважине со скоростью, VST, аналогичной скорости звука в скважинном флюиде. Звуковые отражения от структур пласта месторождения обычно являются значительно меньшими по сравнению с модой Стоунли, и может быть трудно обнаружить, прибывают ли они в одно и то же время, или позже, по сравнению с модой Стоунли. Следовательно, является очень желательным иметь расстояние от источника звука до звукового датчика таким, что интересующее звуковое отражение прибывает в звуковой датчик прежде моды Стоунли, когда оно более легко обнаруживается. Например, для звукового отражателя, параллельного буровой скважине, ортогональное расстояние отражателя от буровой скважины, d, при котором звуковое отражение и мода Стоунли прибывают одновременно, может быть получено посредством:

где L является расстоянием между источником звука и звуковым датчиком, а V является скоростью распространения звуковой волны в пласте месторождения. Ясно, что d увеличивается линейно с l, расстоянием от источника звука до звукового датчика, и, таким образом, большое значение l облегчает обнаружение звуковых отражателей на больших глубинах проникновения, d.
[0020] Апертура массива звуковых датчиков может влиять на качество измерения звукового обследования и глубину проникновения двумя способами. Во-первых, более значительная апертура облегчает разделение, посредством обработки сигнала, звуковых волн, пересекающих массив с различными скоростями. Обычный специалист в области техники знает ряд способов для осуществления такого разделения звуковых волн, пересекающих массив с различными скоростями. Во-вторых, более значительная апертура увеличивает число раз, которое отдельный фрагмент звукового отражателя подвергается выборке, когда инструментальное средство звукового обследования перемещается по буровой скважине рядом с отражателем. Эта увеличенная выборка, известная обычному специалисту в области техники как "кратность", увеличивает соотношение сигнал-шум, так как образцы выборки могут быть объединены или "уложены друг на друга", чтобы улучшать соотношение сигнал-шум.
[0021] В отличие от традиционных тросовых инструментальных средств, волоконно-оптический распределенный датчик может обнаруживать звуковые волны, падающие на него во всех точках по его длине. Такой волоконно-оптический распределенный датчик может протягиваться от поверхности земли до нижней части буровой скважины, расстояние часто выше 10000 футов или 2 миль. Таким образом, эффективная апертура волоконно-оптического распределенного датчика может значительно превышать эффективную апертуру типичного традиционного тросового инструментального средства, равную 6 футам или менее.
[0022] В общем, внутрискважинные звуковые исследования выполняются посредством регистрации звуковых волн с помощью единственного датчика или массива датчиков, расположенных в инструментальном средстве для каротажа скважины, развернутом в буровой скважине, которая протягивается от поверхности земли в подповерхностный пласт месторождения. В зависимости от конкретного варианта применения, звуковые волны могут быть сформированы одним или более сейсмическими источниками, расположенными в инструментальном средстве каротажа скважины, в буровой скважине, в которой звуковые волны обнаруживаются, и/или в соседней буровой скважине. Широкое множество источников звука могут быть использованы для формирования звуковых волн. Например, широко известные скважинные источники звука могут включать в себя пьезоэлектрические датчики импульсов, орбитальные, вертикальные и радиальные вибраторы, молотки и электроискровые источники, имплозивные контейнеры.
[0023] Звуковая энергия, сформированная как результат источника звука, может быть зарегистрирована посредством какого-либо из множества типов звуковых датчиков, таких как гидрофоны, геофоны, акселерометры или их сочетание. В типичных скважинных вариантах применения эти типы датчиков соединяются с электрическими компонентами в скважине, которые усиливают, предварительно обрабатывают (например, по полосе пропускания частот) и оцифровывают электрические сигналы, сформированные датчиками в ответ на обнаружение сейсмического события. Оцифрованные сигналы могут затем быть переданы (например, через электрическую проводную линию связи, телеметрию по гидроимпульсному каналу связи, оптическое волокно и т.д.) на поверхность, где они регистрируются. В других вариантах осуществления, они могут быть временно сохранены в скважинном запоминающем устройстве, таком как твердотельная память, и затем позднее извлечены. В той или другой конфигурации, необходимость во внутрискважинной электронике добавляется к физическому размеру, стоимости и сложности инструментального средства для каротажа скважины. Кроме того, внутрискважинная электроника должна быть способна выдерживать, или быть защищенной от, повышенных температур и давлений среды в скважине в течение продолжительных периодов времени.
[0024] Эти ограничения, когда объединяются с ограничениями по величине мощности, которая может быть доставлена в скважину, и объему данных, который может быть либо сохранен в скважине, либо передан на поверхность, также имеют ограниченное число датчиков, которые могут быть использованы в звуковом инструментальном средстве для каротажа скважины. Несмотря на современные технологические достижения, последние инструментальные средства для звукового обследования типично применяют немного более сотни датчиков и двенадцать или меньше звуковых источников.
[0025] Ограничение по размеру также является серьезным ограничением, так как сейсмическое инструментальное средство применяется в ограниченном местоположении (т.е., в буровой скважине). Например, текущие звуковые инструментальные средства для каротажа скважины типично имеют диаметр в два или более дюйма. Этот размер ограничивает способ, которым инструментальное средство для обследования может быть применено, так как его относительно большой диаметр может заранее исключать работу инструментального средства либо с бурильной колонной, либо внутри эксплуатационной насосно-компрессионной колонны (НКТ) (если она установлена) или в кольцевом пространстве между обсадной колонной и НКТ или бурильной колонной. В результате, либо бурильная колонна, либо эксплуатационная НКТ часто должна быть удалена из ствола скважины, прежде чем звуковое инструментальное средство каротажа может быть введено и обследование проведено. Так как удаление НКТ или бурильной колонны является времязатратной и дорогостоящей процедурой, выполнение обследования таким способом является нежелательным.
[0026] Фиг. 1 показывает один примерный вариант осуществления звукового источника (110), развернутого посредством троса (112) звукового источника в первой буровой скважине (116), и волоконно-оптического распределенного датчика (102), развернутого во второй буровой скважине (118). Первая буровая скважина и вторая буровая скважина пересекают пласт (121) месторождения под поверхностью (114) земли. На поверхности (114) земли трос (112) источника звука присоединяется к контроллеру (117) источника звука. Контроллер (117) источника звука возбуждает источник (110) звука, чтобы издавать исходящие из одной точки звуковые волны (12 0) в моменты времени, определенные контроллером (117) источника звука. Источник (110) звука может испускать монопольную диаграмму излучения, или дипольную диаграмму излучения или квадрупольную диаграмму излучения, или мультипольную диаграмму излучения от азимутальной фазированной решетки. Контроллер (117) источника звука может дополнительно быть подключен к системе (104) возбудителя оптических импульсов и сбора данных, таким способом, что параметры возбуждения источника (110) звука, включающие в себя, без ограничения, время возбуждения, форму возбуждающего колебания и диаграмму возбуждающего излучения, могут быть зарегистрированы системой (104) возбудителя оптических импульсов и сбора данных.
[0027] В других вариантах осуществления, источник (110) звука может быть развернут на бурильной колонне и активизирован, управляемым образом, в желаемое время. В этих вариантах осуществления, синхронизация по времени между временами активизации источника (100) звука и системой (104) возбудителя оптических импульсов и сбора данных выполняется с помощью проводной телеметрии в бурильной трубе, или с помощью телеметрии по гидроимпульсному каналу связи, или посредством высокоточных скважинных генераторов синхронизирующих импульсов.
[0028] В других вариантах осуществления, источник (110) звука может быть бурильной головкой, которая формирует звуковую энергию в качестве побочного результата во время своей обычной операции бурения. В этих вариантах осуществления, синхронизация по времени между звуковыми волнами, издаваемыми бурильной головкой, и системой (104) возбудителя оптических импульсов и сбора данных, может быть осуществлена с помощью проводной телеметрии в бурильной трубе, или с помощью телеметрии по гидроимпульсному каналу связи, или с помощью электромагнитной телеметрии, или посредством высокоточных скважинных генераторов тактовых импульсов. Синхронизация по времени может дополнительно использовать звуковой датчик, присоединенный к бурильной колонне в непосредственной близости от бурильной головки. Этот звуковой датчик может обнаруживать и регистрировать излучаемые звуковые волны в непосредственной близости от их источника.
[0029] В еще одних дополнительных вариантах осуществления, источник (110) звука может быть автономным источником звука, свободным для перемещения вверх и вниз по скважине под действием сил плавучести и тяжести, или самодвижущимся посредством присоединенного или интегрированного блока продвижения. В этих вариантах осуществления, синхронизация по времени между звуковыми волнами, издаваемыми бурильной головкой, и системой (104) возбудителя оптических импульсов и сбора данных, может быть осуществлена с помощью высокоточных скважинных генераторов синхронизирующих импульсов, присоединенных с возможностью связи к автономному источнику звука.
[0030] Излучаемые звуковые волны (130) могут распространяться непосредственно во вторую буровую скважину (118). Кроме того, излучаемые звуковые волны (130) могут взаимодействовать со звуковым отражателем (122), тем самым, формируя отраженные звуковые волны (134). Излучаемые звуковые волны (130) и отраженные звуковые волны (134) могут распространяться во вторую буровую скважину (118), где они могут падать на волоконно-оптический распределенный датчик (102).
[0031] В соответствии с одним или более вариантами осуществления, волоконно-оптический распределенный датчик (102) может быть присоединен к системе (104) возбудителя оптических импульсов и сбора данных. Система (104) возбудителя оптических импульсов и сбора данных включают в себя оптический источник, который формирует оптический сигнал, такой как оптический импульс, для опрашивания волоконно-оптического распределенного датчика (102), который развернут во второй буровой скважине (118). В некоторых вариантах осуществления, оптический источник может содержать узкополосный лазер (например, волоконный распределенный лазер с обратной связью) и модулятор, который отбирает короткие импульсы из выходного сигнала лазера. Необязательно, оптический усилитель может быть использован для усиления пиковой мощности импульсов. В некоторых вариантах осуществления, этот усилитель может быть размещен после модулятора. За усилителем может также следовать фильтр для фильтрации в частотной области (посредством полосного фильтра) и/или во временной области (посредством дополнительного модулятора).
[0 032] Импульсы, испускаемые из оптического источника, могут быть запущены в волоконно-оптический распределенный датчик через направленный соединитель, который разделяет исходящие и возвращающиеся сигналы и направляет последние к оптическому приемнику. Оптический приемник может быть объединен в систему (104) возбудителя оптических импульсов и сбора данных, как показано, или может быть отдельным блоком. Направленный соединитель может быть в объемной оптической форме, использующей расщепитель луча, или он может содержать волоконно-оптический соединитель, циркулятор или быстрый переключатель (например, электро-оптический или опто-акустический переключатель). Обратнорассеянный оптический сигнал, возвращаемый от волоконно-оптического распределенного датчика (102) в ответ на опрашивающие оптические импульсы, может быть обнаружен и преобразован в электрический сигнал в оптическом приемнике. Система (104) возбудителя оптических импульсов и сбора данных может получать этот оптический сигнал.
[0033] В некоторых вариантах осуществления, система (104) возбудителя оптических импульсов и сбора данных анализирует принятые возвратные сигналы, чтобы определять местоположения вдоль волоконно-оптического распределенного датчика (102), где сигнал изменяется в ответ на падающую звуковую волну. Кроме того, система (104) возбудителя оптических импульсов и сбора данных может интерпретировать это изменение с точки зрения звуковых волн, модулирующих обратнорассеянный возвратный сигнал волоконно-оптического распределенного датчика (102). Программный код или инструкции для выполнения анализа и интерпретации могут быть сохранены в памяти, включенной в систему (104) возбудителя оптических импулвсов и сбора данных.
[0034] Более конкретно, возвратный сигнал, обработанный в ответ на опрашивающий оптический импульс, направляется в систему (104) возбудителя оптических импульсов и сбора данных. В любое заданное время, Т, соответствующее конкретному расстоянию вдоль волоконно-оптического распределенного датчика (102), оптическое поле, прибывающее в приемник, является векторной суммой всех оптических полей, сформированных всеми оптическими рассеивателями в пределах длины волоконно-оптического распределенного датчика (102), которая была занята возбужденным оптическим импульсом во время Т/2. Относительная фаза этих оптических рассеивателей, зависящая от длины волны лазера и распределения оптических рассеивателей, определяет, действительно ли сигналы от этих оптических рассеивателей суммируются до большого абсолютного значения (конструктивная интерференция) или практически нейтрализуют друг друга (деструктивная интерференция).
[0035] Когда излучаемые звуковые волны (130), и отраженные звуковые волны (124) падают на, и связываются с, волоконно-оптическим распределенным датчиком (102), падающие звуковые волны (120, 124) подвергают механическому напряжению волоконно-оптический распределенный датчик (102). Механическое напряжение на волоконно-оптическом распределенном датчике (102) изменяет относительное положение между рассеивающими центрами посредством простого растяжения волокна. Механическое напряжение также изменяет локальный коэффициент преломления стекла волоконно-оптического распределенного датчика (102). Оба этих эффекта изменяют относительную фазу света, рассеиваемого от каждого рассеивающего центра. В результате, сигнал интерференции в нарушенном фрагменте волоконно-оптического распределенного датчика (102) варьируется посредством модуляции длины волоконно-оптического распределенного датчика (102), так как сигнал интерференции, который может быть конструктивным (т.е., рассеяние от каждого центра было приблизительно синфазным, их электрические поля суммируются в большое значение), теперь является деструктивным (т.е., относительная фаза рассеянных сигналов от каждого отражателя суммируется в небольшую амплитуду электрического поля).
[0036] Система (104) возбудителя оптических импульсов и сбора данных может быть соединена с компьютерной системой (140), которая содержит инструкции для обработки полученных записей о звуковых волнах. Иллюстрированный компьютер (14 0) предполагает охватывать любое вычислительное устройство, такое как высокопроизводительное вычислительное (НРС) устройство, сервер, настольный компьютер, портативный компьютер, ноутбук, порт беспроводной передачи данных, смартфон, персональный цифровой помощник (PDA), планшетное вычислительное устройство, один или более процессоров в этих устройствах или любое другое подходящее устройство обработки, включающее в себя физические или виртуальные экземпляры (или те и другие) вычислительного устройства. Дополнительно, компьютер (140) может включать в себя компьютер, который включает в себя устройство ввода, такое как кнопочная панель, клавиатура, сенсорный экран, или другое устройство, которое может принимать пользовательскую информацию, и устройство вывода, которое передает информацию, ассоциированную с работой компьютера (140), включающую в себя цифровые данные, визуальную или аудиоинформацию (или комбинацию информации), или GUI.
[0037] В соответствии с одним или более вариантами осуществления, компьютерная система (140) может быть расположена на или рядом с первой буровой (116) скважиной или второй буровой скважиной (118). Альтернативно, компьютерная система (140) может быть расположена удаленно в местном, региональном или центральном вычислительном центре. В некоторых реализациях, один или более компонентов компьютерной системы (140) могут быть сконфигурированы, чтобы работать в окружениях, включающих в себя облачное вычислительное, локальное, глобальное или другое окружение (или сочетание окружений).
[0038] Фиг. 2 показывает примерный вариант осуществления, в котором первая буровая скважина и вторая буровая скважина расположены совместно, и существует только единственная буровая скважина (216), в которой развертываются источник (210) звука и волоконно-оптический распределенный датчик (202). В соответствии с одним или более вариантами осуществления, трос (212) источника звука и волоконно-оптический распределенный датчик (202) объединяются в единый трос, предоставляющий сигналы питания и управления источнику (210) звука, а также обнаруживающий звуковые волны, падающие на него по его длине. В одном или более вариантах осуществления, источник (210) звука может быть прикреплен к низу объединенного троса. В других вариантах осуществления, источник (210) звука может быть расположен в промежуточном местоположении по длине объединенного троса, таким образом, звуковые волны могут падать на волоконно-оптический распределенный датчик как выше, так и ниже источника (210) звука.
[0039] В соответствии с одним или более вариантами осуществления, волоконно-оптический распределенный датчик (202) и трос (212) источника звука могут быть развернуты независимо в буровой скважине (216). Эти независимые развертывания могут предоставлять возможность тросу (212) источника звука и прикрепленному источнику (210) звука подниматься и опускаться в буровой скважине (216) независимо от волоконно-оптического распределенного датчика (202), который может оставаться неподвижным во время перемещения источника (210) звука.
[004 0] В соответствии с одним или более вариантами осуществления, источник (210) звука, иллюстрированный на фиг. 2, может быть возбужден контроллером (217) источника звука, чтобы издавать излучаемые звуковые волны (230). Источник (210) звука может издавать монопольную диаграмму излучения или дипольную диаграмму излучения или квадрупольную диаграмму излучения. Кроме того, источник (210) звука может быть источником в виде фазированной решетки. Источник в виде фазированной решетки может содержать множество элементов, каждый из которых может быть активизирован в регулируемый момент времени. Источник в виде фазированной решетки может издавать мультипольную диаграмму излучения, определенную различиями в регулируемом времени активизации, в которое каждый из множества элементов активизируется. Источник (210) звука может издавать диаграмму излучения, содержащую какое-либо сочетание монопольной, дипольной и квадрупольной диаграммы излучения. Контроллер (117) источника звука может дополнительно быть подключен к возбудителю оптических импульсов и системе (204) сбора данных, таким способом, что параметры возбуждения источника (210) звука, включающие в себя, без ограничения, время возбуждения, форму возбуждающего колебания и диаграмму возбуждающего излучения, могут быть зарегистрированы системой (104) возбудителя оптических импульсов и сбора данных. Излучаемые звуковые волны (230) могут затем падать на звуковой отражатель (222) и, тем самым, создавать отраженные звуковые волны (214). Звуковой отражатель может быть, без ограничения, границей между различными типами горных пород, границей пластов месторождения, границей между различными типами порового флюида, границей между различными насыщениями поровых флюидов, разломом, трещиной и группой трещин. Часть отраженных звуковых волн (214) может затем распространяться обратно в буровую скважину (216), где они могут падать на волоконно-оптический распределенный датчик (202).
[0041] Когда излучаемые звуковые волны (230), и отраженные звуковые волны (224) падают на, и связываются с, и оказывают механическое напряжение на волоконно-оптическом распределенном датчике (202). Механическое напряжение на волоконно-оптическом распределенном датчике (102) может изменять относительную фазу возвратных оптических сигналов, которые могут быть зарегистрированы системой (204) возбудителя оптических импульсов и сбора данных в качестве зарегистрированных данных. Эти зарегистрированные данные могут затем быть сообщены компьютерной системе (240).
[0042] В соответствии с одним или более вариантами осуществления, компьютерная система (240) может выполнять инверсию принятых данных, чтобы определять звуковую характеристику пласта месторождения (221) поблизости от источника (210) звука и волоконно-оптического распределенного датчика (202). Эта инверсия может содержать полноволновую инверсию, основанную, по меньшей мере, частично, на единице данных в данных для определения карты скорости распространения звуковой волны поблизости от источника (210) звука и волоконно-оптического распределенного датчика (202). Эта инверсия может содержать обратную временную миграцию, основанную, по меньшей мере, частично, на единице данных в наборе данных для определения изображения одного или более звуковых отражателей (222) звуковых волн поблизости от источника (210) звука и волоконного-оптического распределенного датчика (202).
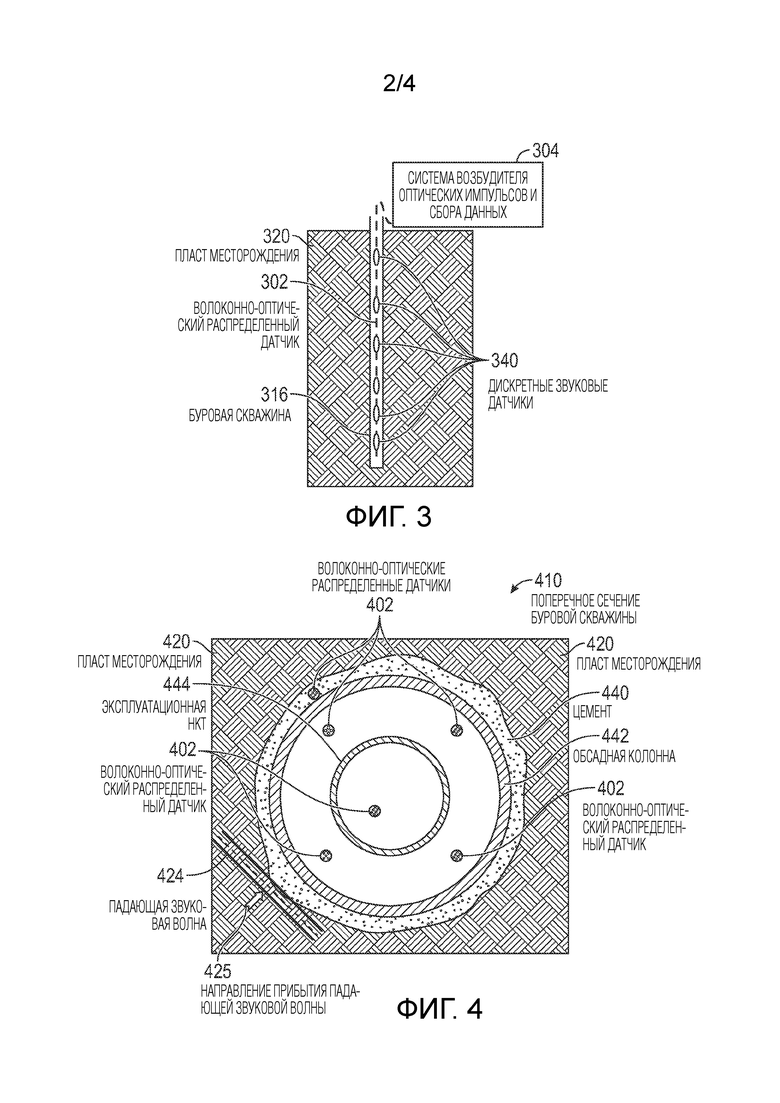
[0043] Фиг. 3 показывает волоконно-оптический распределенный датчик (302), дополненный одним или более дискретными звуковыми датчиками (340), расположенными в точках по длине волоконно-оптического распределенного датчика (302) и развернутыми в буровой скважине (316). В соответствии с одним или более вариантами осуществления, множество дискретных звуковых датчиков (340) могут быть расположены с регулярными интервалами по длине волоконно-оптического распределенного датчика (302), или множество дискретных звуковых датчиков (340) могут быть расположены с нерегулярными интервалами по длине волоконно-оптического распределенного датчика (302). Волоконно-оптический распределенный датчик (302) и дискретные звуковые датчики (340), все могут быть сконфигурированы таким образом, что они все могут сообщать данные системе (304) возбудителя оптических импульсов и сбора данных.
[0044] В соответствии с одним или более вариантами осуществления, дискретные звуковые датчики (340) могут быть гидрофонами (которые измеряют колебания давления), или геофонами (которые измеряют скорость частиц), или акселерометрами (которые измеряют ускорение частиц), и могут быть дискретными оптическими датчиками. Гидрофоны могут быть пьезоэлектрическими гидрофонами, выполненными частично из пьезоэлектрических материалов, или гидрофоны могут быть магнитострикционными гидрофонами и выполнены частично из магнитострикционных материалов. Пьезоэлектрические гидрофоны и магнитострикционные гидрофоны испускают электрический сигнал в ответ на приложенное давление. Геофоны типично содержат подпружиненную проволочную катушку, перемещающуюся в поле постоянного магнита. Акселерометры могут также быть основаны на конструкции подпружиненной движущейся катушки или могут быть пьезорестриктивными или пьезоемкостными конструкциями. В соответствии с другими вариантами осуществления, дискретные оптические датчики (340) могут использовать волоконные брэгговские решетки или могут использовать принцип интерферометрии Фабри-Пейрота. Альтернативно, дискретные оптические датчики (340) могут быть сформированы посредством наматывания волоконно-оптического кабеля в компактную спираль, чтобы формировать намотанный волоконный датчик. Компактная спираль может быть обмотана вокруг трубчатого элемента. Альтернативно, дискретные оптические датчики (340) могут быть волоконно-оптическими датчиками давления и волоконно-оптическими гидрофонами.
[0045] Фиг. 4 показывает поперечное сечение буровой скважины (410), проникающей в пласт (420) месторождения, в соответствии с одним или более вариантами осуществления. Небольшой диаметр волоконно-оптического распределенного датчика (402), например, Ч дюйма или менее, предоставляет возможность развертывания волоконно-оптического распределенного датчика (402) либо внутри, либо позади эксплуатационной НКТ (444) или бурильной колонны (не показана), или цементирования на постоянной основе снаружи обсадной колонны (442) в цементе (440), таким образом, устраняя необходимость либо запирания в скважине, и/либо удаления эксплуатационной НКТ (444) или бурильной колонны перед проведением звукового обследования. Дополнительно, волоконно-оптический кабель, который формирует внутрискважинный компонент для системы волоконно-оптического распределенного датчика (102), является относительно недорогим и, благодаря своей нетоксичной природе, может быть брошен или оставлен неактивным в буровой скважине (410) после использования. Таким образом, одноразовая природа оптического волокна делает возможным развертывание волоконно-оптического распределенного датчика (444) снаружи обсадной трубы и в цементе.
[0046] Кроме того, фиг. 4 показывает множество волоконно-оптических распределенных датчиков (402), распределенных во множестве радиусов и азимутов в буровой скважине (410), в соответствии с одним или более вариантами осуществления. Конфигурация, показанная на фиг. 4, может быть использована для определения направления (425) прибытия падающей звуковой волны (424). Волоконно-оптический распределенный датчик (402), размещенный на первой стороне буровой скважины (410), может обнаруживать падающую звуковую волну (424) в более ранний момент времени по сравнению с волоконно-оптическим распределенным датчиком (402), расположенным на противоположной стороне буровой скважины (410), если первая сторона буровой скважины (410) находится ближе к прибывающей звуковой волне (424). Аналогично, первый волоконно-оптический распределенный датчик (402), расположенный рядом с окружностью буровой скважины (410), может обнаруживать падающую звуковую волну (424) раньше по сравнению со вторым волоконно-оптическим распределенным датчиком (402), расположенным ближе к оси буровой скважины (410), если первый волоконно-оптический датчик находится в направлении прибытия звуковой волны (425).
[0047] Позиционирование волоконно-оптического распределенного датчика (402) во множестве мест в поперечном сечении буровой скважины (410) может быть осуществлено посредством развертывания множества волоконно-оптических распределенных датчиков (402) в буровой скважине (410). Однако, альтернативный способ для осуществления множества местоположений в поперечном сечении буровой скважины (410) может быть осуществлен посредством наматывания волоконно-оптического распределенного датчика (402) по окружности буровой скважины, или вокруг структуры в буровой скважине (410), такой как обсадная колонна (442), или эксплуатационная НКТ (444), спиралевидным образом. Хотя спираль может проходить только через поперечное сечение буровой скважины (410) в единственной точке, она может занимать множество различных позиций в поперечном сечении буровой скважины (410) в пределах короткого осевого расстояния. Таким образом, с высоким уровнем приближения можно выполнять измерение, эквивалентное измерению, выполняемому посредством множества волоконно-оптических распределенных датчиков (402) во множестве мест в поперечном сечении буровой скважины (410).
[0048] Фиг. 5 показывает блок-схему последовательности операций, показывающую примерный вариант осуществления звукового обследования с помощью волоконно-оптического распределенного датчика, в соответствии с одним или более вариантами осуществления. На этапе 502 источник (110, 210) звука может быть развернут в первой буровой скважине (116, 216). На этапе 504 первый волоконно-оптический распределенный датчик (102, 202, 302, 402) может быть развернут во второй буровой скважине (218). В соответствии с некоторыми вариантами осуществления, первая буровая скважина (416) и вторая буровая скважина (418) могут быть одной и той же буровой скважиной или соседними буровыми скважинами. На этапе 506 источник (110, 210) звука может быть возбужден посредством системы (104, 204) возбудителя оптических импульсов и сбора данных и издавать излучаемые звуковые волны (120, 220).
[004 9] На этапе 510 часть этих звуковых волн может падать на волоконно-оптический распределенный датчик (102, 202, 302), и волоконно-оптический распределенный датчик (102, 202, 302) может обнаруживать изменения в когерентном рэлеевском шуме (CRN), создаваемом в волоконно-оптическом кабеле в ответ на оптические импульсы и излучаемые и отраженные звуковые волны, падающие на волоконно-оптический распределенный датчик. Дополнительно, система (104, 204) возбудителя оптических импульсов и сбора данных может регистрировать результирующие данные.
[0050] На этапе 510 инверсия данных выполняется, чтобы определить звуковую характеристику пласта месторождения поблизости от источника звука и волоконно-оптического распределенного датчика. В соответствии с одним или более вариантами осуществления, выполнение инверсии может включать в себя выполнение полноволновой инверсии (FWI). В соответствии с одним или более вариантами осуществления, выполнение инверсии может включать в себя выполнение обратной временной миграции (RTM). В соответствии с одним или более вариантами осуществления, выполнение инверсии может включать в себя как FWI, так и RTM.
[0051] Скорость распространения звуковой волны может изменяться с пространственным положением в интересующей подземной области. Скорость распространения звуковой волны может быть использована для определения изменений в свойствах горной породы, такой как плотность, пористость или состав порового флюида. Скорость распространения звуковой волны может быть использована для моделирования распространения звуковой волны. Скорость распространения звуковой волны может быть использована для изображения границ пласта, или трещины или группы трещин, или изменения содержимого порового флюида в интересующей области.
[0052] Фиг. 6 показывает блок-схему последовательности операций, описывающую примерный вариант осуществления FWI. FWI является способом инвертирования измеренных звуковых данных, чтобы формировать многомерную карту для карты скорости распространения звука интересующей области. Многомерная карта может быть трехмерной, или двухмерной, или одномерной, в зависимости от варианта применения и распределения измерения.
[0053] На этапе 602 FWI получает первоначальную оценку карты скорости распространения звуковой волны для интересующей области, окружающей источник (110, 210) звука и волоконно-оптический распределенный датчик (102, 202, 302, 402). Карта может изменяться как функция пространственного положения.
[0054] На этапе 604 первоначальная карта скорости распространения звуковой волны сначала назначается в качестве текущей карты скорости распространения звуковой волны. Позже в последовательности операций, текущая карта скорости распространения звуковой волны будет обновляться итеративно как часть инверсии.
[0055] На этапе 606 FWI использует волновое уравнение упругих волн, или упрощенную версию волнового уравнения упругих волн, такую как волновое уравнение акустических волн или волновое уравнение волн Гельмгольца, чтобы моделировать распространение звуковых волн в интересующей подземной области и имитировать звуковые волны, измеренные посредством волоконно-оптического распределенного датчика и дискретных звуковых датчиков, по меньшей мере, частично на основе текущей карты скорости распространения звуковой волны. В соответствии с одним или более вариантами осуществления, это моделирование или распространение звуковой волны и имитация звуковых волн, измеренных посредством волоконно-оптического распределенного датчика и дискретных звуковых датчиков, могут быть выполнены посредством компьютерной системы (140, 240).
[0056] На этапе 608 измеренные звуковые волны получаются от волоконно-оптических распределенных датчиков, согласно одному или более вариантам осуществления.
[0057] На этапе 610 смоделированные звуковые волны и измеренные звуковые волны могут затем быть сравнены, и функция, обозначенная как "целевая функция", может быть вычислена путем количественного определения разницы между смоделированными и измеренными звуковыми волнами. В соответствии с одним или более вариантами осуществления, целевая функция может быть квадратом разницы между измеренными звуковыми волнами и смоделированными звуковыми волнами, суммированными по временным выборкам, звуковым датчикам и возбуждениям источника звука.
[0058] На этапе 612, в соответствии с одним или более вариантами осуществления, целевая функция может быть минимизирована посредством вычисления обновления в текущей карте скорости распространения звуковой волны в интересующей области.
[0059] На этапе 614 FWI может быть проверена на предмет сходимости. В соответствии с одним или более вариантами осуществления, проверка на сходимость может содержать оценку целевой функции и определение того, находится ли значение целевой функции ниже предварительно выбранного значения, когда предварительно выбранное значение определяет количественно удовлетворительную степень сходства между смоделированными звуковыми волнами и измеренными звуковыми волнами. Если FWI сошлась, текущая карта скорости распространения звуковой волны может быть обозначена как конечная карта скорости распространения звуковой волны, на этапе 616, и процесс FWI завершается. Если FWI не сошлась, тогда обновление в текущей карте скорости распространения звуковой волны может быть добавлено к текущей карте скорости распространения звуковой волны, чтобы формировать новую карту скорости распространения звуковой волны на этапе 604, и этапы 606, 608, 610, 612 и 614 повторяются итеративно.
[0060] Фиг. 7 показывает блок-схему последовательности операций, иллюстрирующую примерный вариант осуществления обратной временной миграции (RTM). RTM является способом обработки измеренных данных отражения звука, чтобы формировать изображения звуковых отражателей в интересующей области. Эти звуковые отражатели могут быть границей между двумя слоями породы, или они могут быть разломом или трещиной или группой трещин в слое породы, или они могут быть границей между двумя различными флюидами в порах породы, или они могут быть границей между слоем флюида и слоем породы. Сильное отражение звука создается, когда существует большой контраст звукового импеданса между средой на различных сторонах от границы. RTM может быть реализована с помощью компьютерной системы (140, 240).
[0061] На этапе 702, в соответствии с одним или более вариантами осуществления, RTM получает измеренные звуковые волны. Измеренные звуковые волны могут быть получены от волоконно-оптического распределенного датчика (102, 202, 302, 402) и могут быть получены от дискретных звуковых датчиков.
[0062] На этапе 704 RTM может получать, в соответствии с одним или более вариантами осуществления, карту скорости распространения звуковой волны. Эта карта скорости
распространения звуковой волны может быть получена посредством выполнения FWI, или из множества других способов, знакомых обычному специалисту в области техники.
[0063] На этапе 706, в соответствии с одним или более вариантами осуществления, RTM может использовать волновое уравнение упругих волн, или упрощенную версию волнового уравнения упругих волн, такую как волновое уравнение звуковых волн или волновое уравнение волн Гельмгольца, чтобы моделировать распространение звуковых волн от волоконно-оптического распределенного датчика (102, 202, 302, 402) и местоположения дискретных звуковых датчиков (340) назад во времени, или в "обратном времени", в пласте месторождения (121, 221, 320), окружающем звуковые датчики.
[0064] Кроме того, на этапе 708 в соответствии с одним или более вариантами осуществления, RTM использует волновое уравнение упругих волн, или упрощенную версию волнового уравнения упругих волн, чтобы моделировать распространение звуковых волн вперед во времени от местоположений источника (110, 210) звука в пласт месторождения (121, 221, 320).
[0065] На этапе 710, в соответствии с одним или более вариантами осуществления, RTM может использовать условие формирования изображения, которое применяет принцип, что смоделированные назад во времени звуковые волны от волоконно-оптического распределенного датчика (102, 202, 302, 402) и дискретных звуковых датчиков (340), и смоделированные вперед во времени волны от источника (110, 210) звука располагаются рядом в пласте месторождения только в пространственном местоположении, где распространяющиеся вперед во времени волны сформировали отраженные звуковые волны. Этот принцип совместного расположения может быть реализован приблизительно как кросс-корреляция с нулевой задержкой, или как свертка, объединенная с этапом компенсации освещения, или как операция, обратная свертке. Джонс, "Tutorial: migration imaging conditions", First Break, том 32, cc 45-55, декабрь 2014, предоставляет дополнительную информацию и примеры условий формирования изображения.
[0066] Наконец, на этапе 712, в соответствии с одним или более вариантами осуществления, значение амплитуды отражения, определенное по условию формирования изображения, может быть суммировано по всему источнику, и всем местоположениям датчиков, чтобы создавать RTM-изображение звуковых отражателей для звуковых волн поблизости от источника (110, 210) звука и волоконно-оптического распределенного датчика (102, 202, 302, 402).
[0067] В то время как открытие было описано относительно ограниченного числа вариантов осуществления, специалисты в области техники, имеющие пользу от этого открытия, поймут, что другие варианты осуществления могут быть придуманы, которые не отступают от рамок настоящего открытия, которые описаны в данном документе. Соответственно, рамки открытия должны быть ограничены только прилагаемой формулой изобретения.
[0068] Хотя лишь несколько примерных вариантов осуществления было описано подробно выше, специалисты в области техники легко поймут, что множество модификаций являются возможными в примерных вариантах осуществления без существенного отступления от этого изобретения. Соответственно, все такие модификации предполагают включение в рамки этого раскрытия, которые определены в последующей формуле изобретения. В формуле изобретения, какие-либо пункты типа средство-плюс-функция предназначаются, чтобы охватывать структуры, описанные в данном документе, как выполняющие перечисленные функцию(и), и эквиваленты таких структур. Аналогично, какие-либо пункты типа этап-плюс-функция в формуле изобретения предназначаются, чтобы охватывать действия, описываемые здесь как выполняющие перечисленные функцию(и), и эквиваленты таких действий. Явным намерением заявителя является не применять 35 U.S.С §112(f) для каких-либо ограничений каких-либо пунктов формулы в данном документе за исключением тех, в которых формула изобретения явно использует слова "средство для" или "этап для" вместе с ассоциированной функцией.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПЛОТНОСТИ БЕЗ ИСТОЧНИКА, СПОСОБЫ И СИСТЕМЫ | 2012 |
|
RU2608636C1 |
| МОНИТОРИНГ ГИДРАВЛИЧЕСКОГО РАЗРЫВА ПЛАСТА | 2010 |
|
RU2648743C2 |
| МОНИТОРИНГ СКВАЖИНЫ С ПОМОЩЬЮ СРЕДСТВА РАСПРЕДЕЛЕННОГО ИЗМЕРЕНИЯ | 2010 |
|
RU2568652C2 |
| МОНИТОРИНГ ГИДРАВЛИЧЕСКОГО РАЗРЫВА ПЛАСТА | 2010 |
|
RU2537419C2 |
| ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ ФЛЮИДА ПО ДАННЫМ АКУСТИЧЕСКОГО КАРОТАЖА | 2008 |
|
RU2477369C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ИСТОЧНИКА ЗВУКА | 2012 |
|
RU2593620C2 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ СКВАЖИННАЯ СЕЙСМИЧЕСКАЯ СИСТЕМА ИЗМЕРЕНИЯ НА ОСНОВЕ РЭЛЕЕВСКОГО ОБРАТНОГО РАССЕЯНИЯ | 2012 |
|
RU2561009C2 |
| ГЕОНАВИГАЦИЯ ПРИ БУРЕНИИ СКВАЖИН С ИСПОЛЬЗОВАНИЕМ РАСПРЕДЕЛЕННОГО АКУСТИЧЕСКОГО ЗОНДИРОВАНИЯ | 2014 |
|
RU2684267C1 |
| ОБНАРУЖЕНИЕ ПРИТОКА ГАЗА В СТВОЛЕ СКВАЖИНЫ | 2012 |
|
RU2570211C2 |
| РАСПРЕДЕЛЕННОЕ АКУСТИЧЕСКОЕ ИЗМЕРЕНИЕ ДЛЯ ПАССИВНОЙ ДАЛЬНОМЕТРИИ | 2013 |
|
RU2661747C2 |



Изобретение относится к области геофизики и может быть использовано при внутрискважинных акустических обследованиях в нефтегазовой отрасли. Предложена система определения характеристик подповерхностного месторождения, включающая в себя источник (110) звука, развернутый в первой буровой скважине (116), и волоконно-оптический распределенный датчик (102), развернутый во второй буровой скважине (118). Обе буровые скважины проходят от поверхности (122) земли в пласт месторождения (120). Оптическое волокно (102) конфигурируется, чтобы реагировать по своей длине на падающие звуковые волны (130), формируемые источником (110) звука и распространяющиеся через первую буровую скважину (116), через пласт месторождения (120) и через вторую буровую скважину (118). Система дополнительно включает в себя оптический источник (104), чтобы выпускать оптические импульсы внутрь волоконно-оптического распределенного датчика (102), в то время как звуковые волны (130) падают на волоконно-оптический распределенный датчик (102). Система также включает в себя систему (103) сбора данных, присоединенную к волоконно-оптическому распределенному датчику (102), чтобы обнаруживать временные изменения в когерентном релеевском шуме (CRN), формируемом в волоконно-оптическом распределенном датчике (102) в ответ на оптические импульсы и падающие звуковые волны (130); и компьютерную систему (140), сконфигурированную, чтобы принимать данные от системы (104) сбора данных. Технический результат – повышение точности и информативности получаемых данных. 2 н. и 12 з.п. ф-лы, 7 ил.
1. Система определения характеристик подповерхностного месторождения, содержащая:
источник звука, автономно развернутый в качестве автономного источника звука в первой буровой скважине, проходящей от поверхности в подповерхностный пласт месторождения;
волоконно-оптический распределенный датчик, развернутый во второй буровой скважине, проходящей от поверхности в подповерхностный пласт месторождения, волоконно-оптический распределенный датчик, сконфигурированный, чтобы реагировать по своей длине на падающие звуковые волны, формируемые источником звука и распространяющиеся через первую буровую скважину, через подповерхностный пласт месторождения и через вторую буровую скважину;
оптический источник, чтобы направлять оптические импульсы внутрь волоконно-оптического распределенного датчика, в то время как звуковые волны падают на волоконно-оптический распределенный датчик;
систему сбора данных, присоединенную к волоконно-оптическому распределенному датчику, чтобы обнаруживать временные изменения в когерентном рэлеевском шуме (CRN), создаваемом в волоконно-оптическом распределенном датчике в ответ на оптические импульсы и падающие звуковые волны; и
компьютерную систему, сконфигурированную, чтобы принимать данные от системы сбора данных, компьютерная система содержит долговременный компьютерно-читаемый носитель с инструкциями, чтобы выполнять инверсию принятых данных для определения звуковой характеристики подповерхностного месторождения поблизости от источника звука и волоконно-оптического распределенного датчика.
2. Система по п. 1, при этом:
инструкции для выполнения инверсии данных, определяющих звуковую характеристику подповерхностного месторождения поблизости от источника звука и волоконно-оптического распределенного датчика, содержат инструкции для выполнения полноволновой инверсии, основанной, по меньшей мере частично, на единице данных в данных, чтобы определять карту скорости распространения звуковой волны поблизости от источника звука и волоконно-оптического распределенного датчика.
3. Система по п. 1, при этом:
инструкции для выполнения инверсии данных, определяющих звуковую характеристику подповерхностного месторождения поблизости от источника звука и волоконно-оптического распределенного датчика, содержат инструкции для выполнения обратной временной миграции, основанной, по меньшей мере частично, на единице данных в наборе данных, чтобы определять изображение одного или более звуковых отражателей звуковых волн поблизости от источника звука и волоконно-оптического распределенного датчика.
4. Система по п. 1, дополнительно содержащая:
один или более дискретных звуковых датчиков, распределенных с интервалами вдоль волоконно-оптического распределенного датчика и выбранных из группы, состоящей из пьезоэлектрического гидрофона, волоконной брэгговской решетки, намотанного волоконного датчика, волоконно-оптического датчика давления и волоконно-оптического гидрофона.
5. Система по п. 1,
при этом источник звука конфигурируется, чтобы испускать диаграмму излучения, выбранную из группы, состоящей из монопольной диаграммы излучения, дипольной диаграммы излучения, квадрупольной диаграммы излучения и регулируемой мультипольной диаграммы излучения.
6. Система по п. 1,
при этом источник звука представляет собой автономный источник звука, самодвижущийся посредством присоединенного или интегрированного блока продвижения.
7. Система по п. 1, при этом волоконно-оптический распределенный датчик, размещенный во второй буровой скважине, проходящей от поверхности земли внутрь пласта месторождения, дополнительно содержит:
множество волоконно-оптических распределенных датчиков, размещенных во второй буровой скважине, проходящей от поверхности земли внутрь пласта месторождения, во множестве мест в площади поперечного сечения буровой скважины.
8. Способ определения характеристик подповерхностного месторождения, содержащий этапы, на которых:
автономно развертывают в качестве источника звука автономный источник звука в первой буровой скважине, проходящей от поверхности в подповерхностный пласт месторождения;
развертывают волоконно-оптический распределенный датчик во второй буровой скважине, проходящей от поверхности в подповерхностный пласт месторождения, волоконно-оптический распределенный датчик сконфигурирован, чтобы реагировать по своей длине на падающие звуковые волны, формируемые источником звука и распространяющиеся через первую буровую скважину, через подповерхностный пласт месторождения и через вторую буровую скважину;
направляют, от оптического источника, оптические импульсы внутрь волоконно-оптического распределенного датчика, в то время как звуковые волны падают на волоконно-оптический распределенный датчик;
собирают данные с помощью системы сбора данных, присоединенной к волоконно-оптическому распределенному датчику, чтобы обнаруживать временные изменения в когерентном рэлеевском шуме (CRN), создаваемом в волоконно-оптическом распределенном датчике в ответ на оптические импульсы и падающие звуковые волны; и
принимают данные от системы сбора данных, при этом принятые данные используются посредством долговременного компьютерно-читаемого носителя, содержащего инструкции для выполнения инверсии принятых данных, чтобы определять звуковую характеристику пласта месторождения поблизости от источника звука и волоконно-оптического распределенного датчика.
9. Способ по п. 8, при этом:
выполнение инверсии набора данных, чтобы определять звуковую характеристику пласта месторождения поблизости от источника звука и волоконно-оптического распределенного датчика, содержит этап, на котором выполняют полноволновую инверсию, основанную, по меньшей мере частично, на единице данных в наборе данных, чтобы определять карту скорости распространения звуковой волны поблизости от источника звука и волоконно-оптического распределенного датчика.
10. Способ по п. 8, при этом:
выполнение инверсии набора данных, чтоб определять звуковую характеристику пласта месторождения поблизости от источника звука и волоконно-оптического распределенного датчика, содержит этап, на котором выполняют обратную временную миграцию, основанную, по меньшей мере частично, на единице данных в данных, чтобы определять изображение одного или более звуковых отражателей звуковых волн поблизости от источника звука и волоконно-оптического распределенного датчика.
11. Способ по п. 8, при этом первая буровая скважина и вторая буровая скважина совпадают в пространстве.
12. Способ по п. 8, при этом развертывание волоконно-оптического распределенного датчика дополнительно содержит этап, на котором:
развертывают один или более дискретных звуковых датчиков, распределенных с интервалами вдоль волоконно-оптического распределенного датчика и выбранных из группы, состоящей из пьезоэлектрического гидрофона, волоконной брэгговской решетки, намотанного волоконного датчика, волоконно-оптического датчика давления и волоконно-оптического гидрофона.
13. Способ по п. 8, при этом источник звука конфигурируется, чтобы испускать диаграмму излучения, выбранную из группы, состоящей из монопольной диаграммы излучения, дипольной диаграммы излучения и квадрупольной диаграммы излучения.
14. Способ по п. 8, при этом развертывание волоконно-оптического распределенного датчика во второй буровой скважине, проходящей от поверхности земли внутрь пласта месторождения, дополнительно содержит этап, на котором:
развертывают множество волоконно-оптических распределенных датчиков, размещенных во второй буровой скважине, проходящей от поверхности земли внутрь пласта месторождения, во множестве мест в площади поперечного сечения буровой скважины.
| US 20160259079 A1, 08.09.2016 | |||
| US 20190293814 A1, 26.09.2019 | |||
| US 20130265851 A1, 10.10.2013 | |||
| US 20170038246 A1, 09.02.2017 | |||
| US 20170108605 A1, 20.04.2017 | |||
| US 20160146661 A1, 26.05.2016. |

