ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к определению положения источников звука и предлагает способ и систему для определения положения источников звука;
в способе и системе несколько акустических датчиков распределены в пространстве, и акустические сигналы, принятые этими несколькими акустическими датчиками, обрабатываются с целью определения положения источника звука. В одном из конкретных вариантов осуществления эти несколько акустических датчиков реализованы в распределенном оптоволоконном датчике.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
На практике часто требуется точно определить положение источника звука. Так, например, при разрыве пластов нефтеносных или газоносных сланцев закачиванием воды и химикатов под высоким давлением (гидравлический разрыв, или «фрекинг») рождается звуковая волна и желательно знать, где произошли эти акустические явления.
Традиционные системы датчиков содержат акустические группы гидрофонов или сейсмоприемников, которые обычно называют «пассивными сейсмоприемниками» или «микросейсмоприемниками» и, как правило, располагают либо линейно, вставив в скважину на расстоянии нескольких сот метров от места закачивания жидкости для гидроразрыва, либо в виде двумерной сетки на поверхности или непосредственно под поверхностью возле нагнетательной скважины. Эти известные технологические решения имеют тот недостаток, что количество датчиков, которые могут быть размещены, ограничено в типовом случае числом менее ста, и их пространственные положения либо постоянны, либо могут быть изменены только путем трудоемкого и затратного по времени нового размещения группы датчиков.
Другой важной областью применения является сфера обеспечения безопасности, например, обнаружение вторжения. Желательно обнаруживать нарушения огражденного периметра, диверсии или несанкционированные врезания в нефте- и газопроводы. Каждое такое действие вызывает появление акустического сигнала, обнаружение которого позволит поднять тревогу. В этом случае при обнаружении акустического явления желательно также знать место его появления. Однако интенсивность источника звука, как правило, неизвестна, поэтому интенсивность сигнала, обнаруженного акустическим датчиком, не является надежным индикатором расстояния между источником и датчиком, и, соответственно, положения источника.
Таким образом, задача, по меньшей мере, одного из вариантов осуществления настоящего изобретения заключается в том, чтобы предложить способ определения положения источника звука, позволяющий преодолеть или ослабить влияние одного или нескольких вышеуказанных недостатков известных технических решений.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно первому варианту настоящего изобретения предлагается способ определения положения источника звука, содержащий следующие шаги:
обеспечивают несколько акустических датчиков;
с помощью этих нескольких акустических датчиков принимают акустический сигнал от источника звука и
обрабатывают принятые акустические сигналы с целью определения положения источника звука относительно, по меньшей мере, одного из акустических датчиков.
В настоящем изобретении предлагается способ измерений с целью определения положения источника звука в зоне вблизи нескольких акустических датчиков. Специалисту будет также понятно, что настоящее изобретение позволяет одновременно определять положение нескольких источников звука посредством измерения нескольких акустических сигналов несколькими акустическими датчиками.
Наиболее предпочтительно обеспечить несколько акустических датчиков с помощью распределенного оптоволоконного датчика. Распределенный оптоволоконный датчик работает как связка отдельных акустических датчиков и обеспечивает ряд преимуществ, в частности, когерентность отдельных акустических измерений. Наиболее предпочтительно использовать в распределенном оптоволоконном датчике интерферометрическое устройство, например, такое как раскрыто подробнее ниже. Предусматривается также возможность применения распределенных оптоволоконных датчиков, использующих когерентный шум Релея. Предусматривается также возможность осуществления изобретения с использованием нескольких независимых синхронизированных точечных датчиков.
В одном из предпочтительных вариантов осуществления настоящего изобретения частью процесса обработки принятых акустических сигналов является определение нескольких наборов данных местоположения, причем в каждый набор данных местоположения входят положение соответствующего акустического датчика и время прихода акустического сигнала на соответствующий акустический датчик, а также определение положения источника звука путем определения соответствия данных местоположения и заранее определенного соотношения между положением источника и данными местоположения.
В одном из альтернативных предпочтительных вариантов осуществления настоящего изобретения частью процесса обработки принятых акустических сигналов является оценка нескольких функций стоимости путем взаимной корреляции принятых акустических сигналов с одним или несколькими принятыми акустическими сигналами, задержанными по заранее определенному соотношению между положением источника и положением акустического датчика, и выделения из этих нескольких функций стоимости максимальной.
Наиболее предпочтительно, чтобы в процесс обработки принятых акустических сигналов входило определение задержки между приходом акустических сигналов, принятых двумя различными акустическими датчиками. Факультативно в процесс обработки принятых акустических сигналов входит определение сдвига фаз между акустическими сигналами, принятыми двумя различными акустическими датчиками. Предпочтительно определяют несколько задержек для соответствующих нескольких пар акустических датчиков. Исходя из известных положений акустических датчиков, положение источника звука может быть определено на основе определения, по меньшей мере, одной задержки.
Далее, способ предпочтительно содержит идентификацию акустического датчика, являющегося ближайшим к источнику звука. Факультативно акустический датчик, ближайший к источнику звука, определяют сравнением нескольких задержек.
В следующем альтернативном варианте осуществления способ содержит выполнение корреляции принятых акустических сигналов соседних акустических датчиков. Предпочтительно акустический датчик, ближайший к источнику звука, идентифицируют путем определения минимальной корреляции принятых акустических сигналов соседних акустических датчиков.
Предпочтительно способ содержит определение расстояния между источником звука и акустическим датчиком, ближайшим к источнику звука. Альтернативно, это расстояние определяют сравнением задержки между акустическим сигналом, принятым акустическим датчиком, ближайшим к источнику звука, и акустическим сигналом, принятым одним или несколькими другими акустическими датчиками. Факультативно расстояние определяют путем определения первого расстояния, относящегося к акустическим датчикам с первой стороны от акустического датчика, ближайшего к источнику звука, определения второго расстояния по акустическим датчикам со второй стороны от акустического датчика, ближайшего к источнику звука, и вычисления среднего значения расстояния. Это среднее значение может быть взвешенным.
Факультативно обеспечение нескольких акустических датчиков содержит расположение этих акустических датчиков вдоль одной или нескольких прямых линий. Альтернативно и предпочтительно обеспечение нескольких акустических датчиков содержит расположение этих акустических датчиков в двумерной расстановке. К примеру, по кругу, квадратом, сеткой, треугольником, змейкой или в другой нелинейной расстановке. Наиболее предпочтительно, чтобы акустические датчики располагались вокруг источника или отслеживаемого объекта.
В одном из вариантов осуществления выполняемая обработка содержит разделение принятых акустических сигналов на их частотные компоненты и определение положения источника исходя из, по меньшей мере, одного (или нескольких) частотных компонентов и известной скорости звука этой частоты в окружающей среде. Это дает то преимущество, что позволяет учитывать местные характеристики дисперсии в отслеживаемой зоне, не требуя длительной и трудоемкой калибровки системы после ее установки. Вместо этого используется частота, на которой скорость звука известна из предшествующих дисперсионных измерений.
В вышеуказанном варианте осуществления обработка, далее, содержит оценку нескольких функций стоимости, связывающих положение акустического датчика с положением источника звука в зависимости от времен задержки соответствующих частотных компонентов принятого акустического сигнала; и определение функции стоимости, указывающей на расстояние до места расположения источника. Таким образом, становится возможным определить расстояние до источника по ряду частот, с учетом условий местной дисперсии, что должно повысить точность определения.
Согласно второму варианту настоящего изобретения предлагается способ мониторинга процесса гидравлического разрыва, содержащий способ согласно первого варианта.
Факультативно способ содержит размещение распределенного оптоволоконного датчика вблизи от нефтеносного или газоносного сланцевого пласта, подвергаемого гидравлическому разрыву.
Факультативно способ содержит закачивание воды и/или химикатов в нефтеносный или газоносный сланцевый пласт и определение положения, по меньшей мере, одного возникшего в результате акустического явления.
Варианты осуществления этого варианта настоящего изобретения могут содержать предпочтительные и факультативные признаки других особенностей настоящего изобретения - и наоборот.
Согласно третьей особенности настоящего изобретения предлагается способ обследования, содержащий способ согласно первого варианта. Предлагаемый способ может быть использован для мониторинга активов, например, нефте- и газопроводов.
Факультативно способ содержит размещение распределенного оптоволоконного датчика вблизи от актива или места, подлежащего мониторингу.
Факультативно распределенный оптоволоконный датчик размещают на активе или вдоль него, или вокруг места, подлежащего мониторингу.
Предпочтительно способ содержит заглубление распределенного оптоволоконного датчика. Альтернативно или предпочтительно распределенный оптоволоконный датчик размещают в заранее заданной геометрической конфигурации.
Факультативно способ содержит корреляцию определяемого положения источника звука с одним или несколькими наборами данных, связанных с положением источника. Например, положение источника звука может быть нанесено на соответствующую карту зоны мониторинга.
Природа источника звука может быть определена в зависимости от длительности соответствующего акустического явления, частоты акустического сигнала и/или амплитуды сигнала акустического явления.
Факультативно способ содержит подачу звукового предупреждающего сигнала или сигнала тревоги, в зависимости от одной или нескольких измеренных характеристик акустического сигнала. Так, например, может быть использован замер положения источника звука относительно акустического датчика с целью определения пространственного соотношения положения источника и защищаемого актива для подачи предупреждающего сигнала или сигнала тревоги в случае определения того, что это пространственное соотношение соответствует угрозе (или воспринимается как угроза) активу.
Варианты осуществления этого варианта настоящего изобретения могут содержать предпочтительные и факультативные признаки других особенностей настоящего изобретения - и наоборот.
Согласно четвертому варианту настоящего изобретения предлагается машиночитаемый носитель, содержащий машинный код, который, при отработке компьютером, осуществляет компьютерную реализацию способа согласно любой из предшествующих особенностей.
Машиночитаемый носитель может быть энергозависимым или энергонезависимым, может содержаться в Оперативном Запоминающем Устройстве, ОЗУ (RAM), Постоянном Запоминающем Устройстве, ПЗУ (ROM), в программно-аппаратных средствах или иных местах, и данную четвертую особенность следует понимать как распространяющуюся на рабочие копии упомянутого машинного кода.
Согласно пятому варианту настоящего изобретения предлагается устройство для определения положения источника звука, содержащее:
несколько акустических датчиков, расположенных для приема акустического сигнала от источника звука, и
средства обработки, сконфигурированные для обработки принятых акустических сигналов с целью определения положения источника звука относительно, по меньшей мере, одного из акустических датчиков.
Наиболее предпочтительно несколько акустических датчиков содержат, по меньшей мере, один распределенный оптоволоконный датчик. Распределенный оптоволоконный датчик работает как связка отдельных акустических датчиков и обеспечивает ряд преимуществ, в частности, когерентность отдельных акустических измерений. Наиболее предпочтительно использовать в распределенном оптоволоконном датчике интерферометрическое устройство, например, такое, как раскрыто подробнее ниже. Предусматривается также возможность применения распределенных оптоволоконных датчиков, использующих когерентный шум Релея. Предусматривается также возможность осуществления изобретения с использованием нескольких независимых синхронизированных точечных датчиков.
Наиболее предпочтительно, чтобы средства обработки были сконфигурированы для определения задержки между приходом акустических сигналов, принятых двумя различными акустическими датчиками. Факультативно средства обработки могут быть сконфигурированы для определения сдвига фаз между акустическими сигналами, принятыми двумя различными акустическими датчиками. Предпочтительно средства обработки сконфигурированы с целью определения нескольких задержек для соответствующих нескольких пар акустических датчиков.
Предпочтительно средства обработки сконфигурированы для определения акустического датчика, ближайшего к источнику звука.
Предпочтительно средства обработки сконфигурированы для определения расстояния между источником звука и акустическим датчиком, ближайшим к источнику звука.
Факультативно несколько акустических датчиков располагают вдоль одной или нескольких прямых линий. Альтернативно и предпочтительно эти акустические датчики располагаются в двумерной расстановке. К примеру, по кругу, квадратом, сеткой, треугольником, змейкой или в другой нелинейной расстановке. Наиболее предпочтительно, чтобы акустические датчики располагались вокруг источника или отслеживаемого объекта. Может также применяться трехмерная геометрия расстановки.
Варианты осуществления этого варианта настоящего изобретения могут содержать предпочтительные и факультативные признаки других особенностей настоящего изобретения - и наоборот.
Согласно шестому варианту настоящего изобретения предлагается скважинное устройство мониторинга, содержащее устройство согласно пятому варианту.
Факультативно устройство содержит распределенный оптоволоконный датчик, размещенный вблизи от нефтеносного или газоносного сланцевого пласта, подвергаемого гидравлическому разрыву.
Варианты осуществления этого варианта настоящего изобретения могут содержать предпочтительные и факультативные признаки других особенностей настоящего изобретения - и наоборот.
Согласно седьмому варианту настоящего изобретения предлагается устройство для обследования, содержащее устройство согласно пятому варианту. Предлагаемое устройство может быть использовано для мониторинга активов, например, нефте- и газопроводов.
Факультативно устройство содержит распределенный оптоволоконный датчик, размещенный вблизи от актива или места, подлежащего мониторингу. Факультативно распределенный оптоволоконный датчик размещают на активе или вдоль него, или вокруг места, подлежащего мониторингу.
Предпочтительно устройство содержит заглубленный распределенный оптоволоконный датчик. Альтернативно или предпочтительно распределенный оптоволоконный датчик размещается в заранее заданной геометрической конфигурации.
Факультативно устройство сконфигурировано для показа положения источника звука, нанесенного на соответствующую карту зоны мониторинга. Факультативно устройство сконфигурировано для подачи сигнала тревоги, в зависимости от одной или нескольких измеренных характеристик акустического сигнала.
Варианты осуществления этого варианта настоящего изобретения могут содержать предпочтительные и факультативные признаки других особенностей настоящего изобретения - и наоборот.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Настоящее изобретение раскрывается ниже на примере со ссылками на сопроводительные чертежи, на которых:
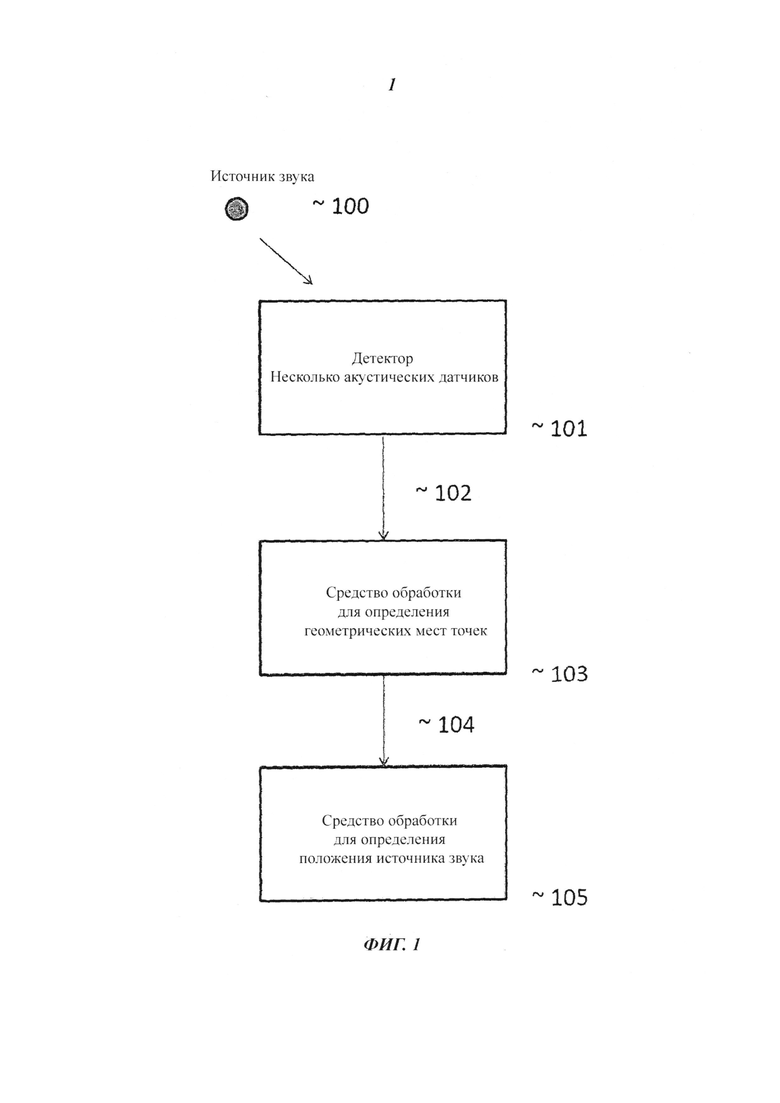
На ФИГ.1 кратко представлены различные компоненты настоящего изобретения,
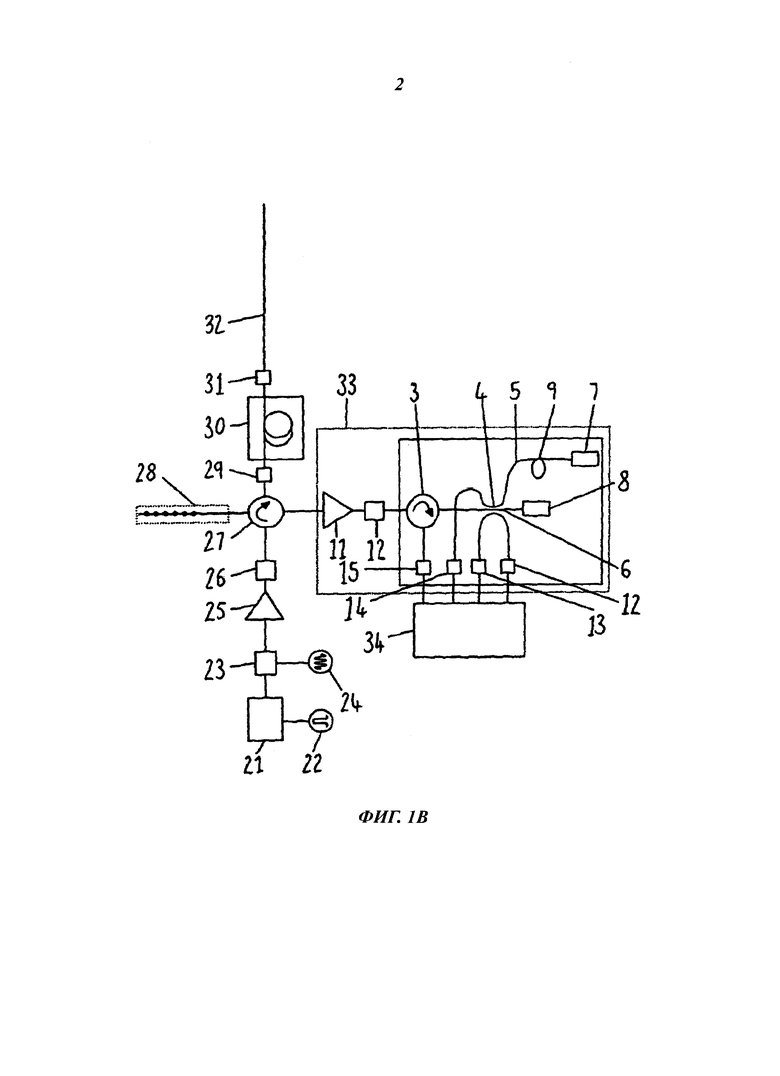
На ФИГ.1b схематически показан интерферометр для измерения оптической амплитуды, фазы и частоты оптического сигнала, из которых могут быть получены акустические амплитуда, фаза и частота; интерферометр может входить в детектор согласно одному из вариантов осуществления настоящего изобретения,
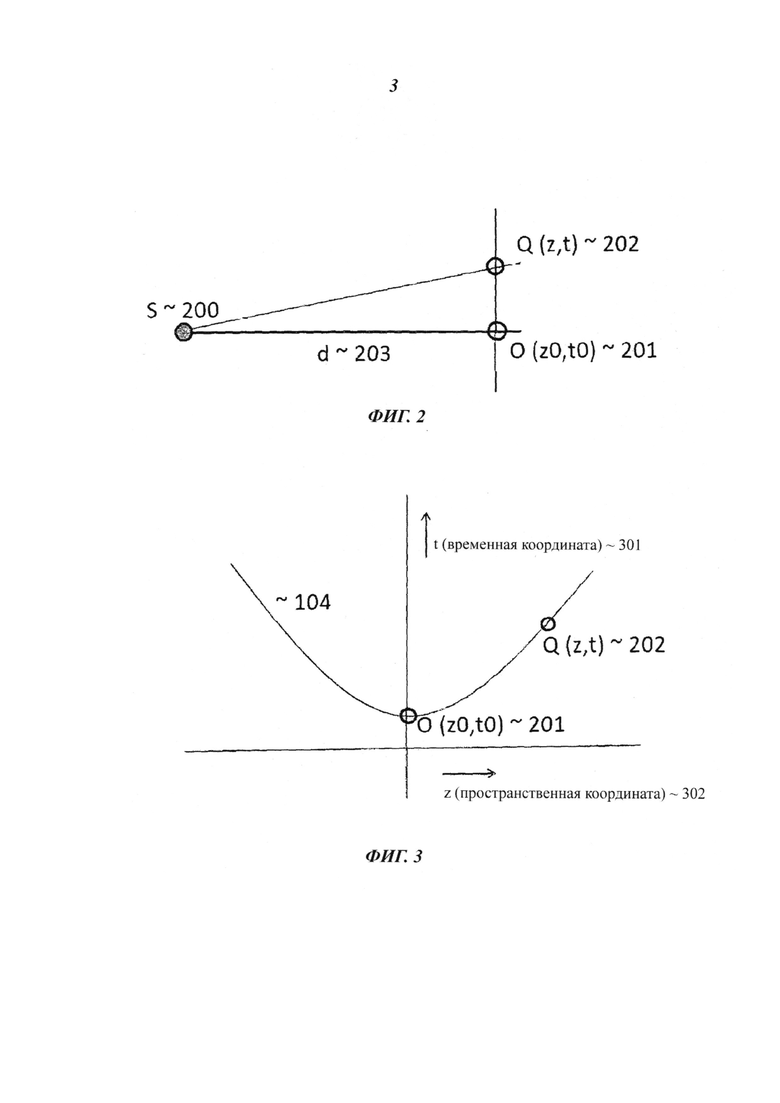
На ФИГ.2 показана связь источника звука и положений обнаружения детекторами,
На ФИГ.3 показано геометрическое место точек, образованное положениями обнаружения источника звука детекторами,
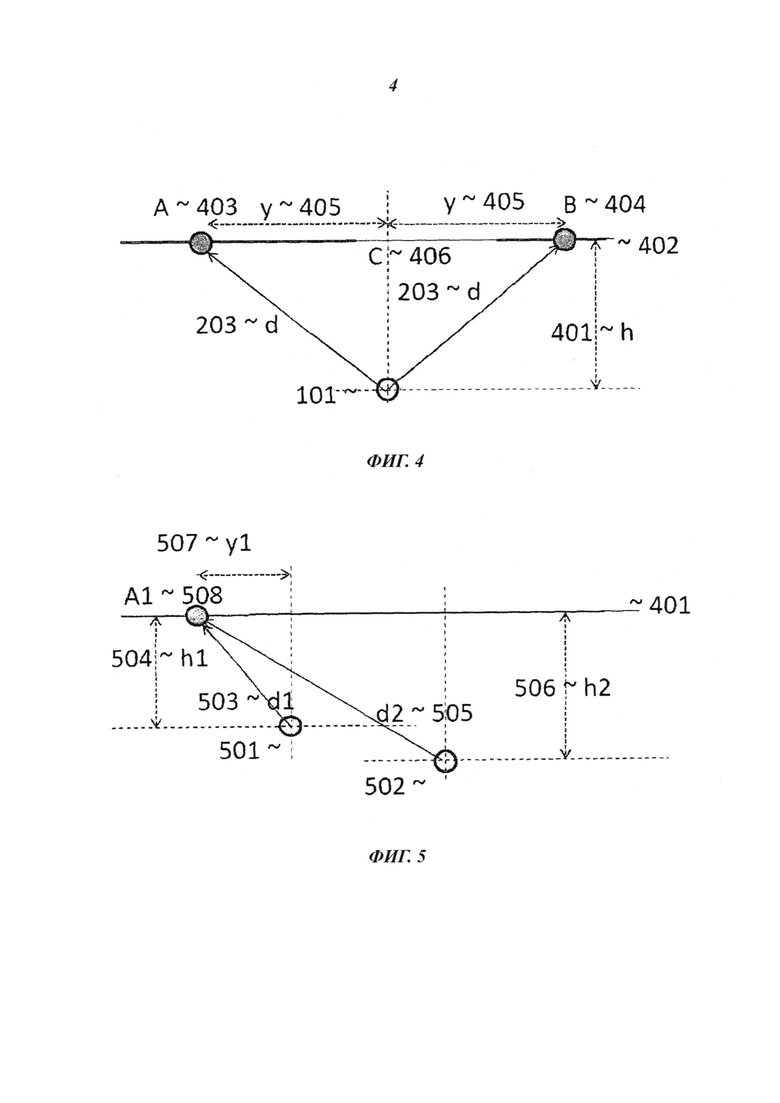
На ФИГ.4 показан разрез через источник звука на поверхности земли и детектор, заглубленный под поверхность,
На ФИГ.5 показан разрез через источник звука на поверхности земли и два детектора, заглубленные под поверхность,
На ФИГ.6 показана карта поверхности с источником звука на поверхности земли и двумя детекторами, заглубленными под поверхность,
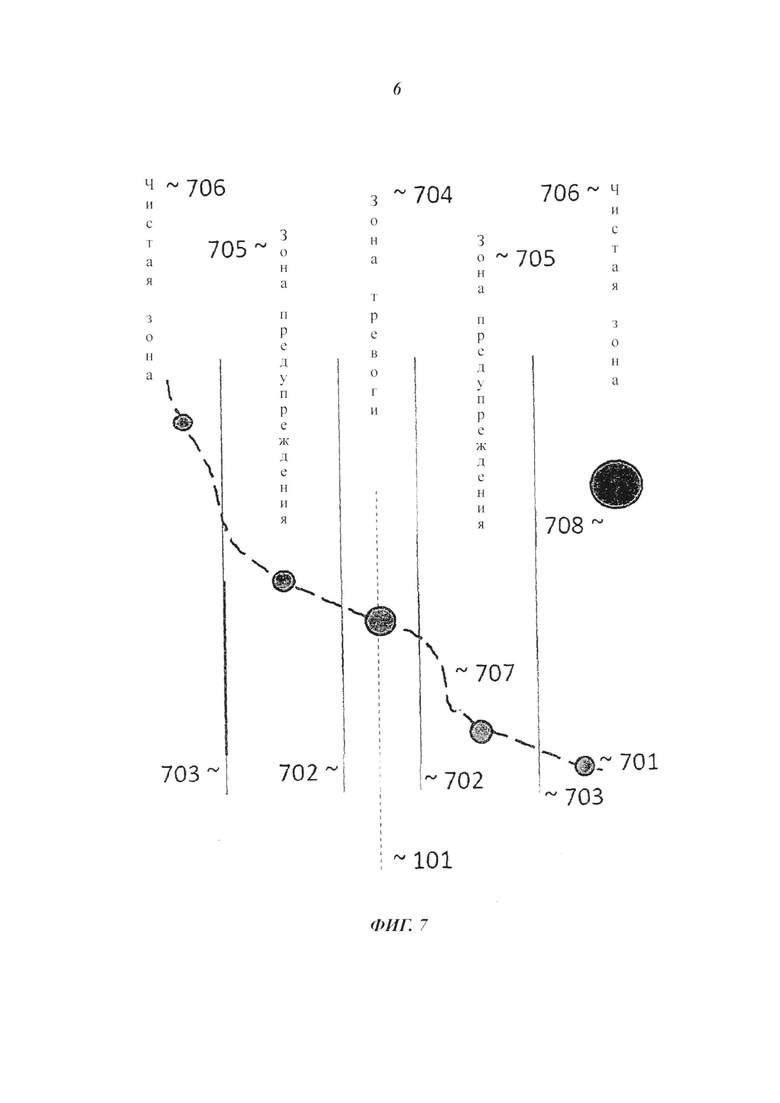
На ФИГ.7 показана карта поверхности с источником звука на поверхности земли и детектором, заглубленным под поверхность; на карте показаны также различные зоны поверхности,
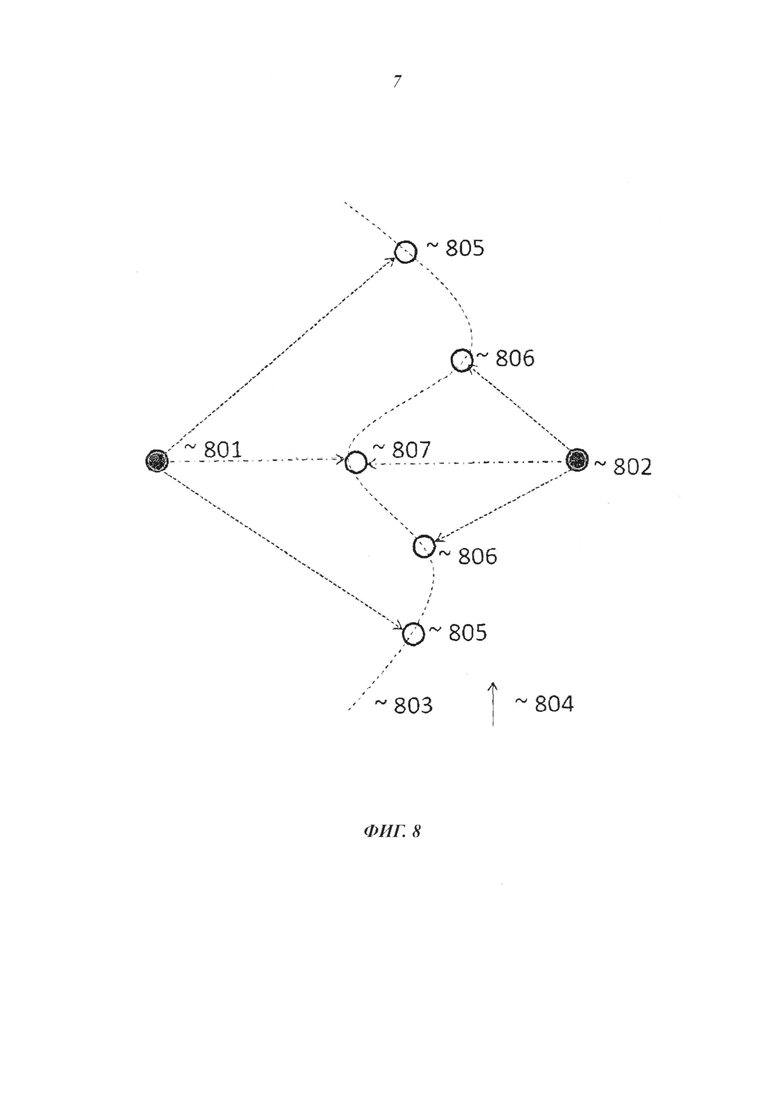
На ФИГ.8 показана карта поверхности, на которой детекторы не расположены вдоль прямой линии,
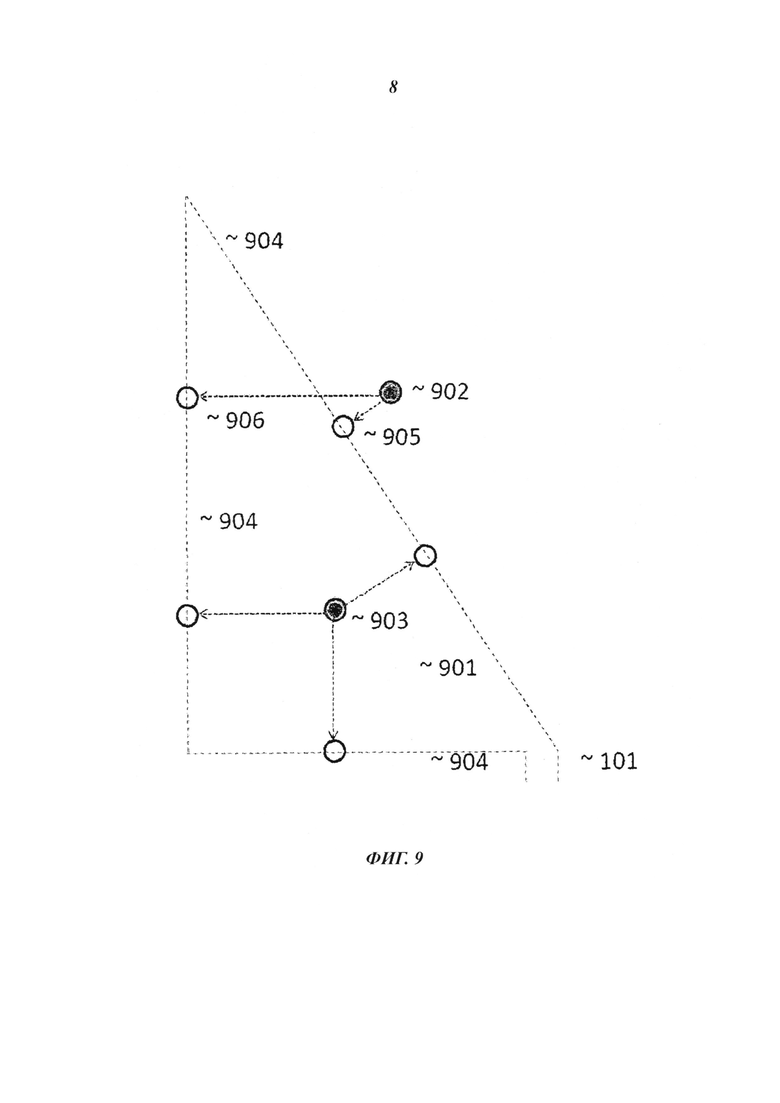
На ФИГ.9 показана карта поверхности, на которой детекторы охватывают некоторую область,
На ФИГ.10 показан пример дисперсионной кривой из уровня техники и
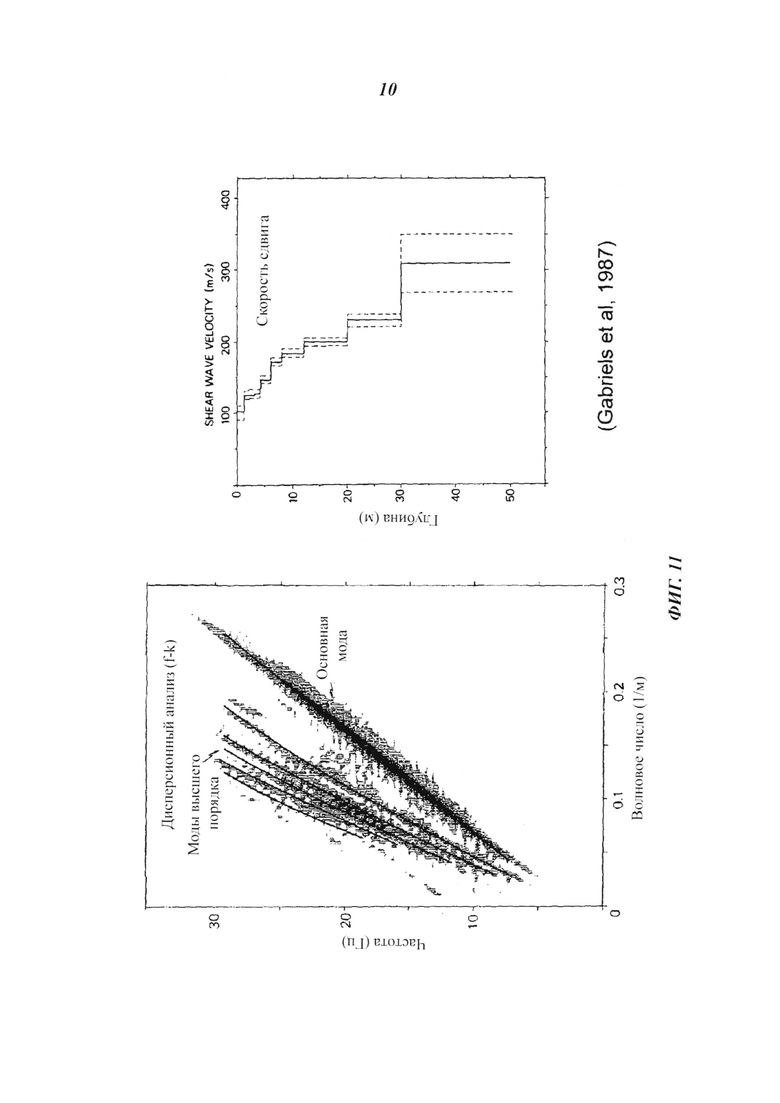
На ФИГ.11 показан пример дисперсионного анализа и профиля сдвиговой волны для известного из уровня техники решения.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Как показано на ФИГ.1, объект настоящего изобретения состоит из одного или нескольких детекторов, причем каждый из них состоит из нескольких акустических датчиков (101), от которых могут быть получены один или несколько сигналов (102), зависящих от расстояния и времени и являющихся результатом излучения одним или несколькими оптическими источниками (100) звуковой волны, уловленной детекторами (101); средств обработки (103), извлекающих из сигнала (102) одно или несколько геометрических мест точек (104), и средств обработки (105), получающих из одного или нескольких геометрических мест точек (104) положение одного или нескольких источников (100) звука. В предпочтительных вариантах осуществления настоящего изобретения количество акустических датчиков велико, они расположены тесно и, предпочтительно, реализованы в виде распределенного акустического датчика; более предпочтительно - в виде распределенного оптоволоконного акустического датчика и еще более предпочтительно - в виде датчика, регистрирующего как акустическую амплитуду, так и фазу. Пример такого предпочтительного детектора раскрыт в патентных заявках WO 2010/136809 A2 и WO 2010/136810 A2 и будет раскрыт подробнее ниже при обсуждении ФИГ.1b.
Время первого поступления акустической волны от источника (100) звука, определенное в сигнале (102), может быть использовано средством обработки (103) для получения требуемого геометрического места точек (104), но достичь более высокого отношения сигнал/шум и, в целом, более эффективной работы при получении геометрического места точек (104) можно в условиях значительной длительности поступления энергии звуковой волны. Это требует когерентности обнаружения звуковой волны детекторами (101) и предпочтительно достигается выполнением детекторов (101) в виде оптоволоконного акустического датчика, регистрирующего как акустическую амплитуду, так и фазу.
Геометрические места точек (104) состоят из наборов временных и пространственных координат точек, в которых в сигнале (102), выданном детекторами (101), обнаруживаются характеристики, общие для сигналов, зарегистрированных несколькими акустическими датчиками детекторов (101). Средство обработки (103) может использовать любые параметры звуковой волны, обнаруженной детекторами (101), для получения требуемых геометрических мест точек (102) взаимной корреляцией, если звуковая волна передается от источников (100) звука к детекторам (101) изотропно с малой дисперсией, так что сигналы, полученные всеми акустическими датчиками (101), имеют существенно одинаковую форму. Однако в одном из предпочтительных вариантов осуществления настоящего изобретения средство обработки (103) получает фазу или фазы одного или нескольких существенно несмешанных частотных компонентов акустического спектра сигнала каждого акустического датчика детектора (101). Таким образом, может быть снижено влияние дисперсии. Специалистам в области обработки сигналов известны способы, применяемые для получения фаз, например, такие, как узкополосный фильтр и преобразования Фурье, поэтому соответствующие подробности здесь не приводятся.
Пространственное расположение акустических датчиков в детекторах (101) может иметь различные формы, которые могут учитываться средством обработки (105) при определении геометрических мест точек (104). Однако в одном из вариантов осуществления настоящего изобретения детектор (101) таков, что несколько акустических датчиков располагаются вдоль одной или нескольких существенно прямых линий в пространстве, что упрощает обработку, выполняемую средством обработки (105).
В одном из конкретных вариантов осуществления настоящего изобретения, раскрытом здесь в качестве примера предпочтительной реализации изобретения, несколько акустических датчиков, как предлагалось выше, реализованы в виде распределенного оптоволоконного датчика, содержащего оптоволокно некоторой длины, размещенное в зоне мониторинга или в ее окружении и соединенное с интерферометром, например, таким, какой показан на ФИГ.1b.
Свет, излученный лазером (21), модулируется импульсным сигналом (22). Оптический усилитель (25) используется для усиления импульсного лазерного пучка, а далее идет полосовой фильтр (26), чтобы отфильтровать шумы Усиленного Спонтанного Излучения, УСИ (АМЕ) усилителя. Далее оптический сигнал поступает в оптический циркулятор (27). На одном из входов циркулятора (27) может быть подключен дополнительный оптический фильтр (28). Свет направляется в волокно
(32) датчика, которое, например, является одномодовым или многомодовым волокном. Некоторая длина этого волокна может быть изолирована и использована в качестве опорного участка (30), например, для размещения в «тихом» месте или для подачи управляемого опорного сигнала. Этот опорный участок (30) может быть сформирован между отражателями - или сочетанием светоделительных элементов и отражателей (29) и (31). Отраженный и обратно рассеянный свет, возникший вдоль волокна (32) датчика, через циркулятор (27) направляется в интерферометр (33).
Поступивший в интерферометр свет усиливается в оптическом усилителе (1) и подается на оптический фильтр (2). Фильтр (2) отфильтровывает лежащие вне полосы шумы УСИ (АМЕ) усилителя (1). Затем свет поступает в оптический циркулятор (3), соединенный с 3×3 оптроном (4). Часть пучка направляется в фотодетектор (12) для отслеживания интенсивности входного пучка света. Другие части пучка направляются в первый и второй оптические тракты (5) и (6), отличающиеся длиной оптического пути. Зеркала Фарадеевского Вращения, ЗФВ (FRM) (7) и (8) отражают свет назад по первому и второму трактам (5) и (6), соответственно. Зеркала фарадеевского вращения обеспечивают компенсацию самопроизвольной поляризации вдоль оптических трактов (5) и (6), так что два частичных световых пучка эффективно интерферируют на каждом из входов 3×3 оптрона (4). Оптрон (4) вводит сдвиги фаз на 0 градусов, +120 градусов и -120 градусов относительно интерференционного сигнала, таким образом создаются первый, второй и третий компоненты интерференционного сигнала с относительными сдвигами по фазе.
Первый и второй компоненты интерференционного сигнала направляются оптроном (4) на фотодетекторы (13) и (14), а третий компонент интерференционного сигнала, падающий на оптический циркулятор (3), направляется на фотодетектор (15).
Фотодетекторы (12), (13), (14) и (15) преобразуют свет в электрические сигналы. Эти электрические сигналы преобразуются в цифровую форму, и затем быстродействующее устройство (34) обработки рассчитывает относительную модуляцию оптической фазы вдоль опорного участка (30) волокна и вдоль волокна (32) датчика. Это устройство обработки синхронизировано по времени с импульсным сигналом (22). Разница длин оптических путей (5) и (6) определяет пространственное разрешение.
Способы расчета относительных фаз и амплитуд трех сдвинутых по фазе компонентов интерференционного сигнала описаны в литературе. Например, в документах Zhiqiang Zhao et al. ("Improved Demodulation Scheme for Fiber Optic Interferometers Using an Asymmetric 3×3 Coupler", J. Lightwave Technology, Vol.13, No.11, November 1997, pp.2059 - 2068) и Huang et al. (US 5946429) раскрыты методики демодуляции выходов 3×3 оптронов в приложениях с мультиплексированием незатухающих волн.
Данные углового сдвига фазы чувствительны к акустическим возмущениям, имевшим место в волокне датчика. Звуковая волна, проходя по оптическому волокну, вызывает сжатия и растяжения в структуре стекла. Это создает разницу длин оптических путей рассеянного назад света, отраженного от двух мест в волокне (т.е. света, распространяющегося по двум трактам в интерферометре), которая измеряется в интерферометре по относительному изменению фазы. Таким образом, данные углового сдвига оптической фазы могут быть обработаны для измерения акустического сигнала в точке отражения света.
Обратимся к ФИГ.3; средство обработки (103) может осуществлять рисование «от руки» геометрических мест точек (104) на графике интенсивности в координатах времени (301) и пространства (302), что может быть полезно для быстрой оценки конкретного акустического поведения источника (100) звука. Однако в одном из предпочтительных вариантов осуществления настоящего изобретения средство обработки (103) может быть реализовано с помощью компьютера и компьютерных программ, отрабатывающих математические алгоритмы.
Теперь средство обработки (105), используемое для получения расстояния от источника (100) звука до детектора (101), будет раскрыто со ссылкой на описанный выше предпочтительный вариант осуществления, в котором детектор состоит из нескольких акустических датчиков, расположенных вдоль прямой линии на длине, приблизительно соизмеримой с предполагаемым расстоянием до источника.
Как показано на ФИГ.2, источник S (200) звука расположен на ортогональном расстоянии d (203) от точки О (201), обозначенной как положение z0. Звуковая волна, распространяющаяся с постоянной скоростью, выйдя из S (200) в момент времени ts, достигнет точки О (201) в момент t0 - до достижения какой-то другой части детектора в момент t, например, точки Q (202) в положении z. Если средняя скорость распространения звуковой волны обозначить как v, то по теореме Пифагора получим выражение:

связывающее положение и время, в которое произвольная отдельная точка фронта сферической звуковой волны, испущенной источником S (200) звука, достигнет произвольной отдельной точки Q (202), относительно точки первого обнаружения О (201). Но время, за которое звуковая волна достигнет точки первого обнаружения О (201), определяется выражением:

Таким образом, комбинируя выражения 1 и 2, получим:

Хотя при определенных условиях может быть возможно определить величины z0 и t0 или ts независимо, но обычно z0 и t0 в точке О (201) или ts в точке S (200), а также расстояние d (203) и скорость v должны считаться неизвестными, получаемыми в средстве обработки (105). Геометрические места точек (104) состоят из пар координат (z, t), так что, используя общеизвестные математические приемы, например, подбор кривой методом наименьших квадратов, специалист в области обработки сигналов может получить наилучшие оценки неизвестных в выражении 1 или выражении 3, получая величину расстояния d (203), что является предпочтительной целью настоящего изобретения. Выражение 1 и выражение 3 основаны на предположении, что скорость распространения звуковой волны постоянна, поэтому любое отклонение замеренных геометрических мест точек (104) от расчетов по выражению 1 или выражению 3 может служить указанием на вариации средней скорости распространения между различными частями геометрических мест точек (104) и источником (100) звука. Если эта средняя скорость вблизи детектора известна, например, из предшествующих измерений, то сравнение величины, полученной средством обработки (105) из выражения 1 или выражения 3, с ранее известным значением может дать поверку качества величины d, одновременно полученной из выражения 1 или выражения 3. Полученные таким образом малые расхождения величин v дадут уверенность в величине d, тогда как большие расхождения величин средней скорости заставят предположить неожиданное поведение и, следовательно, подвергнут сомнению полученную величину d.
Изобретатели обнаружили, что на практике при определенных условиях форма звуковой волны, достигшей акустического детектора (101) и регистрируемой в точке Q (202), может для величин z, больших, чем z0, отличаться от формы волны для величин z, меньших, чем z0. Это различие форм может быть достаточно велико, что позволяет использовать точку различия, в которой происходит изменение, как точку первого поступления О (201), получая таким образом значения t0 и z0. Кроме того, средняя скорость звука v на участке между детектором (101) и источником (100) звука может быть известна благодаря знанию материала или, более точно, из предшествующего измерения. Подставляя выражение 2 в выражение 1, получим:

Таким образом, при известных t0, z0 и v, выражение 4 дает оценку d для каждого измерения расстояния z до геометрического места точек (104) в момент времени t. В этом случае средство обработки (103) для получения геометрических мест точек и средство обработки (105) для получения положения источника звука предпочтительно могут быть скомбинированы, как будет сейчас объяснено.
Выражение 4 можно представить в следующем виде:

Где τ(z) это задержка между моментом, когда звуковая волна достигает точки первого поступления О (201), и положением Q (202). Сигнал (102), полученный от детектора (101), может быть представлен в виде двумерной матрицы замеров A[i, j], в которой строки (индекс i) содержат пространственные замеры (z[i]) в качестве первого размера матрицы, а столбцы (индекс j) содержат временные замеры (t[j]) в качестве второго размера. Вторая двумерная матрица замеров B[i, j, k] может быть получена из A[i, j] сдвигом каждой строки на соответствующую величину, полученную из временной задержки, которую дает соответствующее значение z[i], подставленное в выражение 5 вместе с оценочным значением d[k]. Получив набор матриц В для некоторого диапазона оценочных значений d[k], можно в пространственном измерении определить корреляцию, или функцию стоимости, следующим выражением:

которое равно единице, если для каждого значения j величины B[i, j, k] равны для всех i, и меньше единицы, если не равны. Так как форма обнаруженной звуковой волны принимается существенно неизменной, величина C[k], то есть ее максимум, указывает значение d[k], которое наиболее вероятно, т.е. наилучшим образом описывает измеренную конфигурацию звуковой волны, принятой детектором (101). В тех условиях, когда формы звуковой волны различаются для z>z0 и z<z0, необходимо оценить выражение 6 отдельно для каждой из двух пространственных зон z>z0 и z<z0, а затем два полученных значения наиболее вероятной величины d (203) могут быть скомбинированы для получения одного оптимального значения с использованием взвешенного среднего, где веса даются максимальными значениями функции стоимости C[k] для каждой из зон.
Теперь будет раскрыт дальнейший, многоканальный вариант осуществления, который строится на вышеописанном варианте осуществления с мультиспектральным временем поступления. В этом дальнейшем варианте осуществления множественные частоты от падающей на волоконный детектор звуковой волны могут быть разделены (например, с использованием Быстрого Преобразования Фурье, БПФ (FFT)) и обработаны раздельно для определения положения источника. Это обеспечивает дополнительные преимущества по сравнению с вышеописанным подходом мультиспектрального времени поступления, так как позволяет учесть влияние звукопроводящих свойств земли на поверхностные звуковые волны. В этом отношении земля действует на поверхностные звуковые волны как зависящий от расстояния фильтр, ослабляя сигналы разных частот по-разному, в зависимости от расстояния между источником и детектором. Поэтому в вышеописанном подходе, использующем время поступления, требуется очень тщательная калибровка, чтобы определить для каждого возможного расстояния до искомого источника среднюю скорость звука в земле на участке от этого искомого источника до расстановки детекторов. Настоящий многоканальный вариант осуществления не требует такой тщательной калибровки, применяя вместо этого разделение падающей звуковой волны на ее частотные компоненты и используя частоты, для которых скорость известна из априорных дисперсионных измерений на месте.
Конкретнее, в применениях, относящихся к сфере обеспечения безопасности, распределенный оптоволоконный акустический датчик обычно заглублен примерно на метр под поверхностью земли. В аналогичных устройствах, использующих источник волны сжатия, более двух третей всей излученной энергии преобразуется в волны Релея. Разные частотные компоненты поверхностной волны имеют разные скорости распространения. Это свойство называется дисперсией. Дисперсионные кривые могут быть получены анализом данных, записанных группой обычных сейсмоприемников (см. ФИГ.10, взятую из работы Park CB, Miller RD, Xia J (1999). Multichannel analysis of surface Waves (Masw); Geophys., 64, 800-8).
На ФИГ.11 (взятой из работы Gabriels, P., Snider, R., and Noletm G., 1987, In situ measurements of shear-wave velocity in sediments with higher mode Rayleigh waves. Geophys. Prospecting, 35, 187-196) показан пример первого задокументированного многоканального подхода к исследованию поверхностных волн, относящийся к 1980-м годам, когда голландские исследователи применили 24-канальную систему сбора данных для получения распределения скоростей сдвиговых волн приливно-отливной полосы посредством анализа зарегистрированных поверхностных волн.
Чтобы применить многоканальный анализ для определения положения источника, прежде всего получают две дисперсионных матрицы замеров A[i, j], как описано выше. Т.е. сигнал (102), полученный от детектора (101), может быть представлен в виде двумерной матрицы замеров A[i, j], в которой строки (индекс i) содержат пространственные замеры (z[i]) в качестве первого размера матрицы, а столбцы (индекс j) содержат временные замеры (t[j]) в качестве второго размера. Затем третья двумерная матрица замеров G[i, j, k] может быть выведена из A[i, j] получением частотного спектра временного размера (например, с использованием БПФ (FFT)) и фазовым сдвигом n-го ряда умножением его на 

Вновь, как и прежде, величина C[k], то есть ее максимум, указывает значение d[k], которое наиболее вероятно, т.е. наилучшим образом описывает измеренную конфигурацию звуковой волны, принятой детектором (101). В тех условиях, когда формы звуковой волны различаются для z>z0 и z<z0, необходимо оценить выражение 6-2 отдельно для каждой из двух пространственных зон z>z0 и z<z0, и затем два полученных значения наиболее вероятной величины d (203) могут быть скомбинированы для получения одного оптимального значения с использованием взвешенного среднего, где веса даются максимальными значениями функции стоимости С[k] для каждой из зон.
В отношении получения априорных дисперсионных кривых заметим, что раскрытое устройство согласно настоящим вариантам осуществления пригодно для применений, требующих дисперсионного анализа. Дисперсионный анализ может быть использован для вывода заключения о технических динамических упругих свойствах приповерхностной среды земли и может быть применен во многих геотехнических исследованиях. Другими словами, одно и то же устройство, раскрытое выше, может быть использовано для получения дисперсионных кривых в различных областях применения. Далее, посредством анализа дисперсионных свойств в отношении поверхностных волн может быть построен профиль скоростей сдвига слоев исследуемой зоны. На этой основе могут быть построены графики жесткости почвы в форматах 1-D, 2-0 и 3-D для разнообразных инженерно-геологических проектов.
До сих пор в настоящем описании рассматривалось определение расстояния между одиночным источником и детектором, но следует понимать, что могут быть независимые детекторы и что полученные результаты могут комбинироваться для получения улучшенной информации о положении источника. К примеру, в сфере обеспечения безопасности может возникнуть неопределенность в отношении того, с какой стороны от одиночного детектора располагается источник звука, находящийся на поверхности, под которой может быть заглублен детектор. Во многих случаях эта неопределенность может быть устранена получением релевантной для установки независимой информации, например, об известных барьерах или иных особенностях, отличающих друг от друга пространства с двух сторон от детектора. Для устранения указанной неопределенности может быть использовано два детектора, расположенных на известном расстоянии друг от друга, при этом соответствующие оценки расстояния между источником и детектором комбинируются. Обратимся к ФИГ.4; на ней показано, что детектор (101) заглублен на глубину h (401) под поверхность (402) земли, и, таким образом, определение источника звука на расстоянии d (203) означает, что источник звука S (200) находится на (поверхности (402) в положении либо А (403), либо В (404) на расстоянии y (405) от точки С (406), лежащей вертикально над детектором (101) на поверхности (402). Величина у дается выражением:

Один из способов устранения указанной неопределенности в положении, когда, как показано на ФИГ.4, имеется один детектор (101), показан на ФИГ.5 и заключается в обеспечении двух детекторов (501) и (502), заглубленных под поверхность (401). Вычисляя выражение 7 для соответствующих значений d1 (503), h1 (504), d2 (505) и h2 (506), получаем единственное значение y1 (507), определяющее единственное положение источника А1 (508) на поверхности (401).
Обратимся к ФИГ.6; на ней на виде сверху изображена карта поверхности; результаты определения положения источников на поверхности с помощью детекторов (501) и (502), заглубленных под поверхность земли, могут быть, к примеру, отображены в виде карты с нанесенным положением каждого источника А1 (508), определенным из величины y1 (507) и положения z0 (201) вдоль детектора (501) для данного источника.
Обратимся к ФИГ.7; на ней показана карта поверхности, дополнительно содержащая зоны для пространственной привязки источника на карте; информативно использование размера или цвета указателя положения источника (701) в качестве средства отображения интенсивности звуковой волны от источника (701). Такое указание может появиться, например, в результате прохода сотрудника по поверхности земли, под которой заглублены детекторы (101). Во многих приложениях полезно также проводить, например, границы зон, именно, внутренние (702) и наружные (703). Таким образом, зону в пределах внутренних границ (702) можно назвать зоной (704) тревоги, зоны между внутренней (702) и наружной (703) границами можно назвать зонами (705) предупреждения, а зоны вне наружных (703) границ можно назвать чистыми зонами.
Карта, представленная для примера на ФИГ.7, полезна для быстрой оценки положения источника звука, в частности, с использованием цветового и масштабного кодирования символов. К примеру, на карте может быть видно, как источник (701) звука, движущийся по траектории (707) на поверхности земли, проходит, например, из чистой зоны (возможно, кодированной для отображения зеленым цветом) в зону предупреждения (возможно, кодированную для отображения оранжевым цветом), пересекает зону тревоги (возможно, кодированную красным цветом) и зону предупреждения и выходит в чистую зону. Размером или формой символа, обозначающего положение источника, можно кодировать оценочную интенсивность источника звука, например, можно использовать изображение гуляющего человека для источников низкой интенсивности, изображение копающего человека для источников средней интенсивности и изображение экскаватора для источников высокой интенсивности. ФИГ.7 также показывает, что полезно иметь обеспечиваемую настоящим изобретением возможность определить положение источника звука на поверхности, не используя знаний о сравнительной интенсивности источников звука. Таким образом, как показано на ФИГ.7, источник (708) звука изображен располагающимся в чистой зоне, и хотя он может иметь значительно более высокую интенсивность, чем источники, расположенные значительно ближе к детектору (101), тем не менее, им можно пренебречь вследствие его расположения.
Варианты осуществления настоящего изобретения были раскрыты для случая, когда детекторы располагаются существенно вдоль прямой линии, что предпочтительно для применений, связанных с определением положения на расстоянии многих десятков километров. В этой геометрии положение вдоль детектора (101) и продольное положение в пространстве это один и тот же параметр, что упрощает обработку данных средством обработки (105). Однако имеются преимущества и в группировании детекторов в иной расстановке, отличающейся от прямой линии; в этом случае средство обработки (105) должно обеспечить также соотношение положения вдоль волокна и положения в пространстве, чтобы геометрические места точек (104) могли быть преобразованы в пространственное расположение источника звука.
Обратимся к ФИГ.8; источники (801) и (802) звука показаны на поверхности земли; детектор (803) заглублен под поверхность и сформирован в виде квазиповторяющейся кривой, предпочтительно периодической кривой, идущей вдоль пространственной оси (804). В этом случае показанная на ФИГ.4 неопределенность в положении источника (200) устраняется различием геометрических мест точек, полученных, например, для источников (801) и (802) с разных сторон от детектора в положениях (805) для источника (801) и положениях (806) для источника (802) и общего положения (807) для обоих источников (801, 802).
Обратимся к ФИГ.9; на ней показан детектор (101), охватывающий некоторую исследуемую область (901) так, что звуковая волна от одиночного источника (902) или (903) может быть обнаружена различными частями (904) детектора (101), и таким образом, информация о расстоянии от детектора (101), выдаваемая средством обработки (105) от различных участков (904), может быть скомбинирована для лучшего определения положения источника и/или увеличения отношения сигнал/шум, повышающего вероятность обнаружения волны.
В примерах расстановок детекторов (101), показанных на ФИГ.8 и 9, средство обработки (105) обеспечивает дополнительную фильтрацию и другие известные функции, с которыми знакомы специалисты в области обработки сигналов, с целью различения разных источников, например, (902) и (903), а также различных и зарегистрированных как разделенные положений одного и того же источника, например, (905) и (906), вдоль детектора (101). Может быть использовано множество вариантов расстановки детектора (101), и выбор определяется, в основном, местом и целью применения; следует понимать, что настоящее изобретение включает это множество, включая и обеспечение нескольких детекторов, используемых как независимо, так и в сочетаниях. Следует понимать, что размеры любой расстановки детекторов и любой глубины заглубления зависят от конкретных условий применения, например, от размеров и характера исследуемой области и диапазона интенсивностей источника звука, который требуется обнаружить.
В контексте настоящего применения термин «акустический датчик» относится к средству преобразования энергии звуковой волны в сигнал, зависящий от времени, в том одном месте пространства, в котором находится датчик: термин «распределенный акустический датчик» относится к нескольким акустическим датчикам, расположенным в соседних положениях в пространстве в виде непрерывного пространственного образования, а термин «распределенный оптоволоконный акустический датчик» относится к распределенному акустическому датчику, реализованному с использованием оптического волокна (такого, как было описано в связи с ФИГ.1b). Одно особое преимущество распределенного датчика состоит в том, что он эквивалентен очень большому числу точечных датчиков, распределенных на больших расстояниях. Типовой распределенный оптоволоконный датчик имеет длину 10 км, с разрешением 1 м, т.е. эквивалентен 10000 точечных датчиков, Соответственно, желательно комбинировать преимущества распределенного оптоволоконного датчика и акустических датчиков, регистрирующих амплитуду и фазу звуковой волны.
В настоящем описании, в основном, раскрыты примеры обнаружения в двух измерениях, но следует понимать, что поверхность не обязательно должна быть плоской, что поверхность не является требованием, и что возможно определение положения в трех измерениях. В частности, кабель оптоволоконного датчика может лежать в плоскости, находясь на поверхности, или располагаться под поверхностью, но может и выходить из общей плоскости развертывания в пространство трех измерений. К примеру, для сейсмического или микросейсмического мониторинга развертывание датчиков может производиться на поверхности или в подповерхностной скважине, чтобы можно было проводить определения положения в нескольких направлениях.
Кроме того, для лучшего определения положения конструкция кабеля может быть усовершенствована приспособлением оболочки кабеля и внутренней изоляции для внутренней передачи звуковой волны к размещенному внутри изоляции волокну датчика.
Как отмечалось выше, в различных промышленных областях применения желательно знать расстояние до источника звука. Одно из таких применений - разрыв пластов нефтеносных или газоносных сланцев закачиванием воды и химикатов под высоким давлением. Звуковая волна при разрыве пластов рождается в узкой пространственной зоне, которая может поэтому считаться точечным источником. Мониторинг общего развития и протяженности разрыва можно проводить, измеряя распределение положений и интенсивность таких точечных источников.
Как отмечалось в разделе уровня техники, интенсивность источника звука, как правило, неизвестна, поэтому интенсивность сигнала, обнаруженного акустическим датчиком, не является надежным индикатором расстояния между источником и датчиком. Однако в силу того, что настоящее изобретение дает независимое средство определения расстояния между источником и датчиком, интенсивность зарегистрированной звуковой волны может быть использована как мера интенсивности источника звука, в предположении, что средний коэффициент затухания звука при распространении в среде между источником и датчиком известен.
На предшествующем уровне техники акустический датчик реализуется в виде акустической группы, состоящей из нескольких точечных акустических детекторов, например, гидрофонов или сейсмоприемников, которые обычно называются «пассивными сейсмоприемниками» или «микросейсмоприемниками». Как правило, эти группы датчиков располагаются либо линейно, вставленные в скважину на расстоянии нескольких сот метров от места закачивания флюидов для гидроразрыва, либо в виде двумерной сетки на поверхности или непосредственно под поверхностью возле нагнетательной скважины. Эти известные технологические решения имеют тот недостаток, что количество датчиков, которые могут быть размещены, ограничено в типовом случае числом менее ста, и их пространственное расположение либо постоянно, либо может быть изменено только путем трудоемкого и затратного по времени нового размещения группы датчиков. Распределенный оптоволоконный датчик амплитуды и фазы звуковой волны, например, такой, как раскрытый в настоящем документе, эквивалентен многим тысячам точечных акустических датчиков и может быть развернут в многообразных геометрических конфигурациях; тем самым он преодолевает указанное ограничение известных технических решений, а также обеспечивает преимущество, позволяя использовать высокие звуковые частоты, превышающие 5 кГц.
Другой важной областью применения является сфера обеспечения безопасности, например, обнаружение вторжения лиц, нарушающих огражденный периметр, или надзор за трубопроводами для обнаружения потенциальных диверсий или несанкционированных врезаний в нефте- и газопроводы. В этом применении, когда защищаемая зона может иметь размеры в десятки километров, распределенный датчик имеет явные преимущества, и в настоящем изобретении сделана попытка их использовать. В типовом варианте распределенный оптоволоконный акустический датчик заглублен примерно на метр под поверхность земли и тянется на многие десятки километров, обеспечивая пространственное разрешение порядка одного метра, что позволяет осуществлять детальный мониторинг протяженного пространства.
В настоящем изобретении раскрыт способ определения расстояния от распределенного датчика; линия датчика может быть спроектирована на поверхность земли, под которой датчик заглублен, и тем самым может быть создана карта, на которой может быть отмечен источник звука, обнаруженный, например, человеком, проходящим вблизи датчика. Поскольку, вообще говоря, нет необходимости обнаруживать все источники, предпочтительно иметь возможность использовать расстояние источника от распределенного детектора как критерий разделения источников звука на те, которые следует игнорировать, и те, которые требуют соответствующих действий, например, развертывания персонала охраны для выяснения. Такое разделение может быть легко визуализировано в виде различных зон на пространственной карте, например, выпускаемой под товарным знаком UK Ordnance Survey™ (Картографического управления Великобритании), или на спутниковых картах, выпускаемых под товарным знаком Google Maps™, a идентификация значимости обнаруженных источников может быть выполнена различными средствами, например, цветовым кодом символов разных размеров. Кроме того, координаты распределенного датчика и/или положения обнаруженного источника звука могут быть привязаны к глобальной системе позиционирования (GPS).
Это описание, по большей части, относится к определению положения одиночного источника звука, но следует понимать, что настоящее изобретение не ограничено обнаружением одиночного источника и способно обнаружить несколько источников в разные моменты времени и в разных положениях; ограничения накладывают только пространственное и временное разрешение детектора и амплитуда сигнала, приходящего от источника звука.
Далее, хотя настоящее изобретение раскрыто на примерах использования распределенного оптоволоконного датчика, соединенного с интерферометрическим устройством (для обеспечения высокого пространственного разрешения), однако легко понять, что изобретение может быть реализовано на базе распределенных оптоволоконных датчиков, использующих когерентный шум Релея или, разумеется, несколько синхронизированных точечных датчиков. Специалисту не составит труда применить настоящее изобретение к этим альтернативным схемам обнаружения.
Специалистам в области обработки сигналов известно, как и когда использовать те или иные общеизвестные процедуры обработки сигналов, такие, как преобразования Фурье, фильтрация и усреднение, для достижения целей и улучшения результатов применения настоящего изобретения, и следует понимать, что настоящим эти процедуры включены в данный документ.
Настоящим предполагается, что могут быть осуществлены разнообразные модификации в пределах объема настоящего изобретения, и варианты осуществления изобретения могут включать комбинации особенностей, отличающиеся от заявленных явно.
| название | год | авторы | номер документа |
|---|---|---|---|
| Метод обнаружения объектов и определения их местоположения в реальном времени с помощью распределённых оптоволоконных интерферометрических датчиков вибраций | 2022 |
|
RU2803396C1 |
| РАСПРЕДЕЛЕННОЕ АКУСТИЧЕСКОЕ ИЗМЕРЕНИЕ ДЛЯ ПАССИВНОЙ ДАЛЬНОМЕТРИИ | 2013 |
|
RU2661747C2 |
| ГЕОНАВИГАЦИЯ ПРИ БУРЕНИИ СКВАЖИН С ИСПОЛЬЗОВАНИЕМ РАСПРЕДЕЛЕННОГО АКУСТИЧЕСКОГО ЗОНДИРОВАНИЯ | 2014 |
|
RU2684267C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВОЛОКОННО-ОПТИЧЕСКИХ ИЗМЕРЕНИЙ | 2016 |
|
RU2719323C2 |
| СПОСОБ СЕЙСМИЧЕСКОГО МОНИТОРИНГА ПРИ ПОМОЩИ КОМБИНИРОВАННОЙ СИСТЕМЫ НАБЛЮДЕНИЙ | 2024 |
|
RU2839553C1 |
| ОТКАЗОУСТОЙЧИВОЕ РАСПРЕДЕЛЕННОЕ ОПТОВОЛОКОННОЕ ОБНАРУЖЕНИЕ ПРОНИКНОВЕНИЯ | 2007 |
|
RU2446476C2 |
| МОНИТОРИНГ ГИДРАВЛИЧЕСКОГО РАЗРЫВА ПЛАСТА | 2010 |
|
RU2648743C2 |
| МОНИТОРИНГ ГИДРАВЛИЧЕСКОГО РАЗРЫВА ПЛАСТА | 2010 |
|
RU2537419C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ТЕКУЧИХ СРЕД В ТРУБЕ И СПОСОБ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2250438C9 |
| РАСПРЕДЕЛЕННЫЙ ОПТОВОЛОКОННЫЙ ДАТЧИК | 2009 |
|
RU2482449C2 |


Изобретение относится к области геофизики и может быть использовано для определения местоположения источника звука. Предлагаются способ и система, в которых акустические сигналы, принятые акустическими датчиками, содержащими оптоволоконный датчик, обрабатываются с целью определения положения источника или источников акустических сигналов. Способ и система способны одновременно определять положения нескольких источников звука посредством измерения соответствующих нескольких акустических сигналов. Далее, может быть определена интенсивность акустического сигнала или сигналов. Положение источника звука может быть нанесено на карту зоны мониторинга или использовано для подачи сигнала тревоги, если воспринимается как соответствующее угрозе или вторжению. Альтернативно, способ и система могут быть использованы для мониторинга процесса гидравлического разрыва. Заявленные способ и система предполагают два возможных варианта обработки полученных данных. Согласно первому варианту обработка принятых акустических сигналов содержит оценку нескольких функций стоимости путем взаимной корреляции принятых сигналов. По второму варианту обработка принятых акустических сигналов содержит разделение принятых акустических сигналов на их частотные компоненты. Технический результат - повышение точности и достоверности определения источника звука. 8 н. и 17 з.п. ф-лы, 12 ил.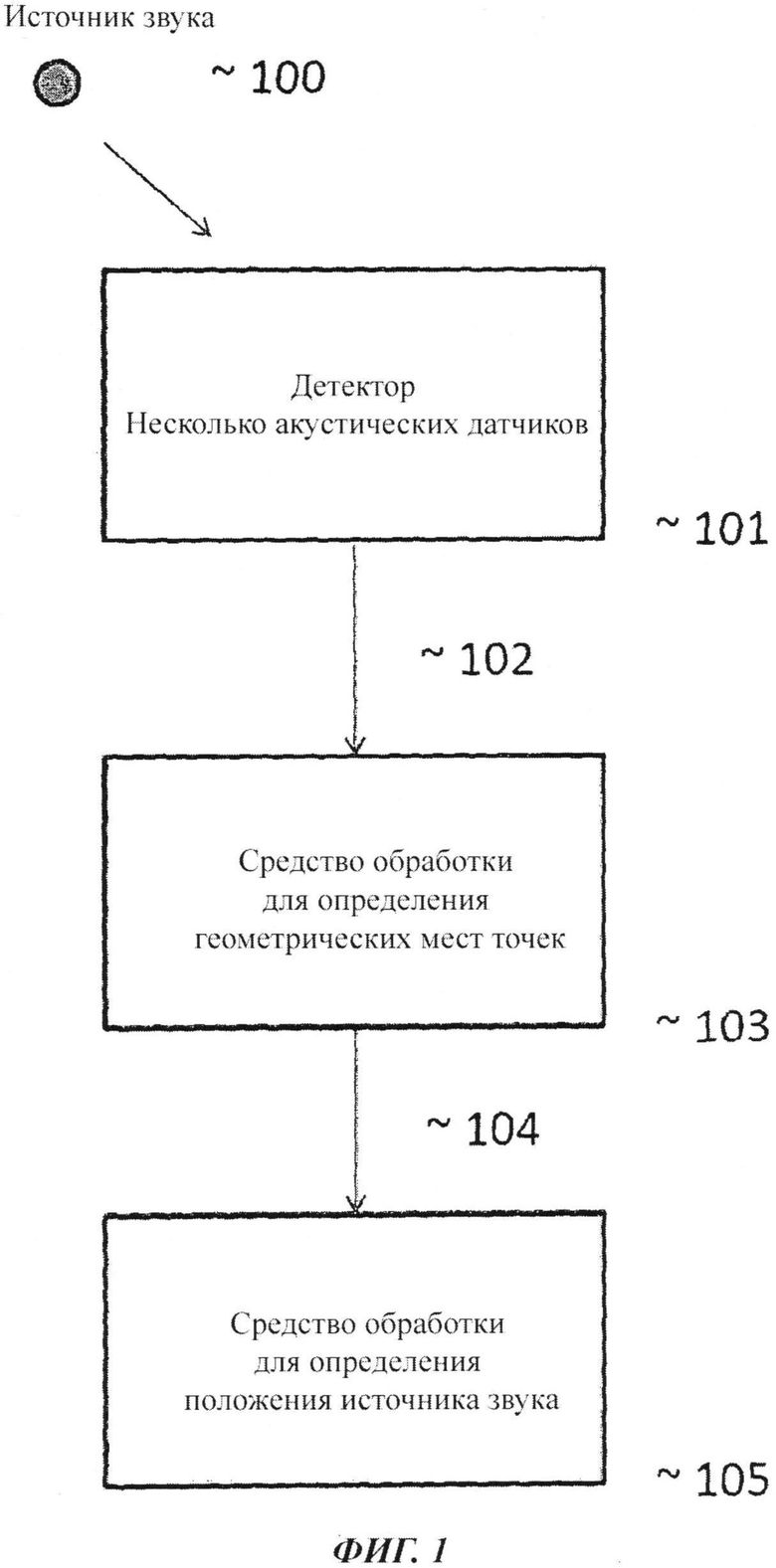
1. Способ определения положения источника звука, содержащий следующие шаги:
обеспечивают несколько акустических датчиков, причем несколько акустических датчиков содержат распределенный оптоволоконный датчик;
с помощью этих нескольких акустических датчиков принимают акустический сигнал от источника звука и
обрабатывают принятые акустические сигналы с целью определения положения источника звука относительно, по меньшей мере, одного из акустических датчиков, причем обработка принятых акустических сигналов содержит оценку нескольких функций стоимости путем взаимной корреляции принятых акустических сигналов с одним или несколькими принятыми акустическими сигналами, задержанными по заранее определенным соотношениям между положением источника и положением акустического датчика, и выделением из этих нескольких функций стоимости максимальной.
2. Способ определения положения источника звука, содержащий следующие шаги:
обеспечивают несколько акустических датчиков, причем несколько акустических датчиков содержат распределенный оптоволоконный датчик;
с помощью этих нескольких акустических датчиков принимают акустический сигнал от источника звука и
обрабатывают принятые акустические сигналы с целью определения положения источника звука относительно, по меньшей мере, одного из акустических датчиков, причем обработка содержит разделение принятых акустических сигналов на их частотные компоненты и определение положения источника исходя из, по меньшей мере, одного частотного компонента и известной скорости звука этой частоты в окружающей среде.
3. Способ по п.1 или 2, отличающийся тем, что распределенный оптоволоконный датчик содержит интерферометр, выполненный с возможностью определения данных углового сдвига фазы оптического сигнала, соответствующих акустическому сигналу.
4. Способ по п.1 или 2, отличающийся тем, что распределенный оптоволоконный датчик использует для измерения акустического сигнала когерентный шум Релея.
5. Способ по любому из пп.1 или 2, отличающийся тем, что дополнительно содержит идентификацию акустического датчика, ближайшего к источнику звука, причем акустический датчик, ближайший к источнику звука, определяют сравнением нескольких задержек между приходом акустических сигналов, принятых различными акустическими датчиками.
6. Способ по любому из пп.1 или 2, отличающийся тем, что при обеспечении нескольких акустических датчиков эти акустические датчики располагают в двумерной расстановке.
7. Способ по любому из пп.1 или 2, отличающийся тем, что акустические датчики располагают вокруг события или объекта, подлежащего мониторингу.
8. Способ по п.2, отличающийся тем, что обработка дополнительно содержит оценку нескольких функций стоимости, связывающих положение акустического датчика с положением источника звука в зависимости от времен запаздывания соответствующих частотных компонентов принятого акустического сигнала, и определение функции стоимости, указывающей на расстояние до места расположения источника.
9. Способ мониторинга процесса гидравлического разрыва, содержащий способ по любому из пп.1-8.
10. Способ мониторинга процесса гидравлического разрыва по п.9, содержащий размещение распределенного оптоволоконного датчика вблизи от нефтеносного или газоносного сланцевого пласта, подвергаемого гидравлическому разрыву.
11. Способ мониторинга процесса гидравлического разрыва по п.9 или 10, содержащий закачивание воды и/или химикатов в нефтеносный или газоносный сланцевый пласт и определение положения, по меньшей мере, одного возникшего в результате акустического явления.
12. Способ обследования, содержащий способ по любому из пп.1-8, содержащий размещение распределенного оптоволоконного датчика вблизи от актива или места, подлежащего мониторингу, причем факультативно распределенный оптоволоконный датчик размещают на активе или вдоль него, или вокруг упомянутого места.
13. Способ обследования по п.12, отличающийся тем, что распределенный волоконный датчик размещают в заранее заданной геометрической конфигурации.
14. Способ обследования по любому из пп.12 или 13, отличающийся тем, что содержит выполнение корреляции определенного положения источника звука с одним или несколькими наборами данных, связанных с положением.
15. Способ обследования по п.14, отличающийся тем, что положение источника звука наносят на соответствующую карту зоны мониторинга.
16. Способ обследования по любому из пп.12 или 13, содержащий определение природы источника звука в зависимости от длительности соответствующего акустического явления, частоты акустического сигнала и/или амплитуды сигнала акустического явления.
17. Способ обследования по любому из пп.12 или 13, содержащий подачу звукового предупреждающего сигнала или сигнала тревоги, в зависимости от одной или нескольких измеренных характеристик акустического сигнала.
18. Способ обследования по любому из пп.12 или 13, содержащий определение пространственного соотношения положения источника и защищаемого актива на основе замера положения источника звука относительно акустического датчика и подачу предупреждающего сигнала или сигнала тревоги в случае определения, что это пространственное соотношение соответствует угрозе или воспринимается как угроза активу.
19. Устройство для определения положения источника звука, содержащее: несколько акустических датчиков, расположенных для приема акустического сигнала от источника звука, причем несколько акустических датчиков содержат, по меньшей мере, один распределенный оптоволоконный датчик, и
средства обработки, сконфигурированные для обработки принятых акустических сигналов с целью определения положения источника звука относительно, по меньшей мере, одного из акустических датчиков, причем
обработка принятых акустических сигналов содержит оценку нескольких функций стоимости путем взаимной корреляции принятых акустических сигналов с одним или несколькими принятыми акустическими сигналами, задержанными по заранее определенным соотношениям между положением источника и положением акустического датчика, и выделением из этих нескольких функций стоимости максимальной.
20. Устройство для определения положения источника звука, содержащее: несколько акустических датчиков, расположенных для приема акустического сигнала от источника звука, причем несколько акустических датчиков содержат, по меньшей мере, один распределенный оптоволоконный датчик, и
средства обработки, сконфигурированные для обработки принятых акустических сигналов с целью определения положения источника звука относительно, по меньшей мере, одного из акустических датчиков, причем средства обработки также предназначены для разделения принятых акустических сигналов на их частотные компоненты и определения положения источника исходя из, по меньшей мере, одного частотного компонента и известной скорости звука этой частоты в окружающей среде.
21. Скважинное устройство мониторинга, содержащее устройство по любому из пп.19 или 20.
22. Скважинное устройство мониторинга по п.21, содержащее распределенный оптоволоконный датчик, размещенный вблизи от нефтеносного или газоносного сланцевого пласта, подвергаемого гидравлическому разрыву.
23. Устройство для обследования, содержащее устройство по любому из пп.19 или 20, причем устройство содержит распределенный оптоволоконный датчик, размещенный вблизи от актива или места, подлежащего мониторингу.
24. Устройство для обследования по п.23, отличающееся тем, что оно выполнено с возможностью отображения положения источника звука, нанесенного на соответствующую карту зоны мониторинга.
25. Устройство для обследования по п.23 или 24, отличающееся тем, что оно выполнено с возможностью подачи предупреждающего сигнала, в зависимости от одной или нескольких измеренных характеристик акустического сигнала.
| US 20110069302 A1 , 24.03.2011 | |||
| WO 2011058313 A2 , 19.05.2011 | |||
| Обеспыливающая эмульсия для обработки поверхности автомобильных дорог | 1982 |
|
SU1096273A1 |
| WO 2010090660 A1 , 12.08.2010 | |||
| RU 2066467 C1, 10.09.1996 | |||
| WO 2011050275 A2 , 28.04.2011. | |||

