Изобретение относится к электрическому манипулятору, характеризуемому установкой в одно положение элементов манипулятора B25J 9/12 для передвижения каретки тросового лифта вдоль троса.
(1) Известна транспортная система «Земля-Луна» (по патенту на полезную модель РФ №121233 по заявке №2011153485/11 от 27.12.2011 г.), содержащая верхний терминал тросового лифта, размещенный на поверхности Луны, основного троса длиной до 340000 км, нижний терминал на дальнем от Луны конце основного троса вблизи Земли, лифтовую кабину и систему движителей, отличающаяся тем, что дополнительно содержит промежуточный терминал с закрепленным на нем дополнительным тросом длиной не менее 80000 км, добавочный движитель и стыковочный узел на нижнем терминале лифта, а также как минимум один стратосферный летательный аппарат, снабженный ответным стыковочным узлом к узлу на нижнем терминале лифта, при этом нижний терминал закреплен на нижнем конце дополнительного троса, промежуточный терминал, имеющий возможность перемещения вдоль основного троса на всю длину дополнительного троса, стратосферный летательный аппарат для автономного перемещения между наземным аэродромом и нижним терминалом лунного лифта и стыковки с нижним терминалом лифта, система движителей обеспечивает перемещение кабины лифта между верхним и нижним терминалами, а добавочный движитель - перемещение промежуточного терминала с дополнительным тросом вдоль основного троса.
Кроме того, лифтовая кабина имеет возможность отстыковки полезного груза в любом месте тросовой системы для продолжения его движения в автономном режиме.
Кроме того, кабина лифта и промежуточный терминал могут перемещаться с постоянным ускорением.
Кроме того, верхний терминал снабжен качающейся подвеской тросовой системы.
Недостатками описанной системы является то, что слишком сложна перегрузка груза или пассажиров со стратосферного самолета в кабину лифта, что при обтекании воздухом на большой скорости самолета может привести к сдуванию груза. Не конкретизируется устройство кабины тросового космического лифта.
(2) Известна космическая лифтовая система Луна-Земля (по патенту на изобретение РФ №2665107, по заявке 2016118318 от 11.05.2016 г. ) для безракетного вывода объектов в космос и спуска грузов на Землю, состоящая из нескольких лебедочно-тросовых систем, связывающих главный лифтовый модуль, размещаемый в окрестности коллинеарной точки Лагранжа L1, с одной стороны - с видимой поверхностью Луны, а с другой стороны - с околоземной областью, причем лебедки, установленные на поверхности Луны и главном лифтовом модуле, обеспечивают управление длинами тросов для поддержания постоянного сдвига центра тяжести космической лифтовой системы в сторону Земли относительно указанной точки Лагранжа L1.
Кроме того, космическая лифтовая система обеспечивает прием и передачу челночных грузов между стыковочным узлом лебедочно-тросовой системы, достигающим стратосферы, и самолетом с Земли.
Кроме того, космическая лифтовая система обеспечивает вывод полезной нагрузки на высоты 50000 км и более над Землей, а также возвращение полезной нагрузки с указанных высот на Землю - при прохождении Луной, соответственно апогея и перигея ее орбиты вокруг Земли.
Недостатками описанной системы является то, что слишком сложна перегрузка груза или пассажиров со стратосферного самолета в кабину лифта, что при обтекании воздухом на большой скорости самолета может привести к сдуванию груза. Не конкретизируется устройство кабины тросового космического лифта.
(3) Известен робот FEDOR (Final Experimental Demonstration Object Research) (Робот Федор: особенности, характеристики, назначение. / www.robo-sapiens.ru, 12.10.2019 г.; И. Афанасьев «Федор» летит на МКС. / ж. Русский космос, 2019, вып.9, с. 2-9), робот российского производства, способный делать многое из того, что умеют люди: ходить, как люди, подниматься по лестнице, преодолевать полосу препятствий, водить автомобиль, ползать на четвереньках, садиться на шпагат, стрелять с двух рук по мишеням, работать пилой и болгаркой, делать уколы, донести человека до машины и отвезти его в больницу. Изначально он предназначен для спасения людей для МЧС и пожарной службы. Робот оснащен двумя камерами, тепловизором, микрофоном, GPS, ГЛОНАСС, полутора десятками дальномерных лазеров и специальной системой для определения положения тела. Он узнает типовые предметы и инструменты, различает препятствия. 22.08.2019 г. Робот Федор летал в космос, находился на МКС 17 суток (Космический полет робота «Федора». / www.ria.ru, 22.08.2019 г.). Робот может управляться дистанционно человеком, одевшим очки дополненной реальности, копируя его движения.
Недостатком робота Федора является то, что при перебирании в руках троса в экстремальных условиях он будет подолгу искать участок троса, за который ему надо уцепиться, что замедлит перебирание троса.
(4) Известен и предлагается в качестве прототипа манипулятор (по патенту на изобретение РФ №2693963 по заявке №2018127282 от 24.07.2018 г.), содержащий корпус, привод движений, захват, шарнирный многозвенник, соединяющий захват с корпусом, отличающийся тем, что шарнирный многозвенник выполнен в виде двух шарнирных ветвей, расположенных по разные стороны захвата, связанных между собой образующими внутренние шарниры штифтами и закрепленных посредством шаровых опор в корпусе, а выходящие из корпуса свободные концы шарнирных ветвей связаны с приводом движений.
Недостатками манипулятора являются 1) его неприспособленность к зажиму участка троса и перемещению вдоль троса, из-за чего трос будет теряться и выпадать из зажимов, 2) шарниры многозвенников выполнены грацильными, не приспособленными к перемещению многотонных грузов, например, шарниры многозвенников не имеют систем автоматического поворота каждой трубки звена.
Целью изобретения является обеспечение передвижения каретки тросового космического лифта вдоль троса.
Техническим результатом изобретения является
- передвижение каретки тросового космического лифта не с помощью колес вдоль троса, которые будут истирать трос, и не с помощью электрической индукции, которая потребует подведения больших токов к тросу, а рукоходным способом с помощью манипуляторов, получающих питание от солнечных батарей,
- трос не теряется и не выпадает из рук манипуляторов при движении,
- уменьшение истирания троса о захват манипулятора путем медленного движения вдоль пальцев манипулятора ленты из фенилона или неопрена.
Этот технический результат достигается тем, что предложен манипулятор для движения каретки тросового лифта вдоль троса, включающий корпус, привод движений, захват, шарнирный многозвенник, соединяющий захват с корпусом, отличающийся тем, что корпус является кареткой тросового лифта, шарнирный многозвенник каждой из двух рук манипулятора выполнен в форме двух шарнирно соединенных трубчатых конструкций, образующих по форме ромбы с переменными углами с возможностью изменения угла от острого угла до угла в 180° с превращением ромба в параллельные прямые, в узлах вершин ромбов расположены электродвигатели с прикрепленными к каждому их ротору трубки многозвенника с возможностью застопоривания роторов и трубок в двух положениях острого угла у шарнира многозвенника 20°-45° и угла 160°-180°, в узлах между ромбами установлено по 4 упомянутых электродвигателя, в узлах возле захватов и возле корпуса установлено по два упомянутых электродвигателя, электродвигатели со стопорами и упорами образуют привод движений рук манипулятора, захват каждой руки манипулятора выполнен в форме большого ограничительного кольца, на несущих стержнях, проходящих через центр большого ограничительного кольца, закреплены малые ограничительные кольца и посередине ось с подвижно закрепленными на ней двумя пальцами с возможностью зажатия между пальцами троса космического лифта, с одного конца пальцы имеют ножки с закрепленными на них роликами с возможностью перекатывания роликов по внутренней поверхности большого ограничительного кольца с другого конца пальцы имеют ответвления с закрепленными на них пружинами, один конец которых прикреплен к пальцу, а второй конец - к ответвлению противоположного пальца, и имеют загибы с закрепленными на них тросами, намотанными на стопорящийся вал электродвигателя, закрепленного на ножках на большом ограничительном кольце с отверстием для троса в одной из ножек, с возможностью сжатия пальцев при отмотке тросов и разжатии пружин и разжатия пальцев при намотке тросов с последующим стопорением вала электродвигателя тросов и сжатии пружин, пружины и последние электродвигатели со стопорами и тросами образуют привод движений захватов манипулятора, корпус манипулятора снабжен двумя цилиндрическими солнечными батареями, каждая из которых с одного конца соединена держателями с корпусом, а с второго конца содержит стержни с закрепленным на них в центре симметрии окружности цилиндра ограничительным кольцом для троса лифта, при этом манипулятор выполнен с возможностью поочередного зажатия захватами двух рук троса с движением каретки вдоль троса так, что руки одновременно то распрямляются, то сжимаются.
Кроме того, каждая рука манипулятора может иметь по два захвата описанной конструкции.
Кроме того, каждый палец захвата со стороны троса может содержать медленно двигающуюся ленту из фенилона толщиной 3-4 мм, при этом каждый палец содержит бортик от соскакивания ленты высотой в половину толщины ленты со стороны, противоположной от стороны зажимания ленты, лента каждого пальца снабжена с концов барабанами с электродвигателями и механизмами изменения направления движения ленты и натягивания ленты с возможностью смены барабанов с лентой после ее истирания.
Кроме того, каждый палец захвата со стороны троса может содержать медленно двигающуюся ленту из неопрена толщиной 3-4 мм, при этом каждый палец содержит бортик от соскакивания ленты высотой в половину толщины ленты со стороны, противоположной от стороны зажимания ленты, лента каждого пальца снабжена с концов барабанами с электродвигателями и механизмами изменения направления движения ленты и натягивания ленты с возможностью смены барабанов с лентой после ее истирания. Описание фигур.
На фигурах приведены следующие изображения.
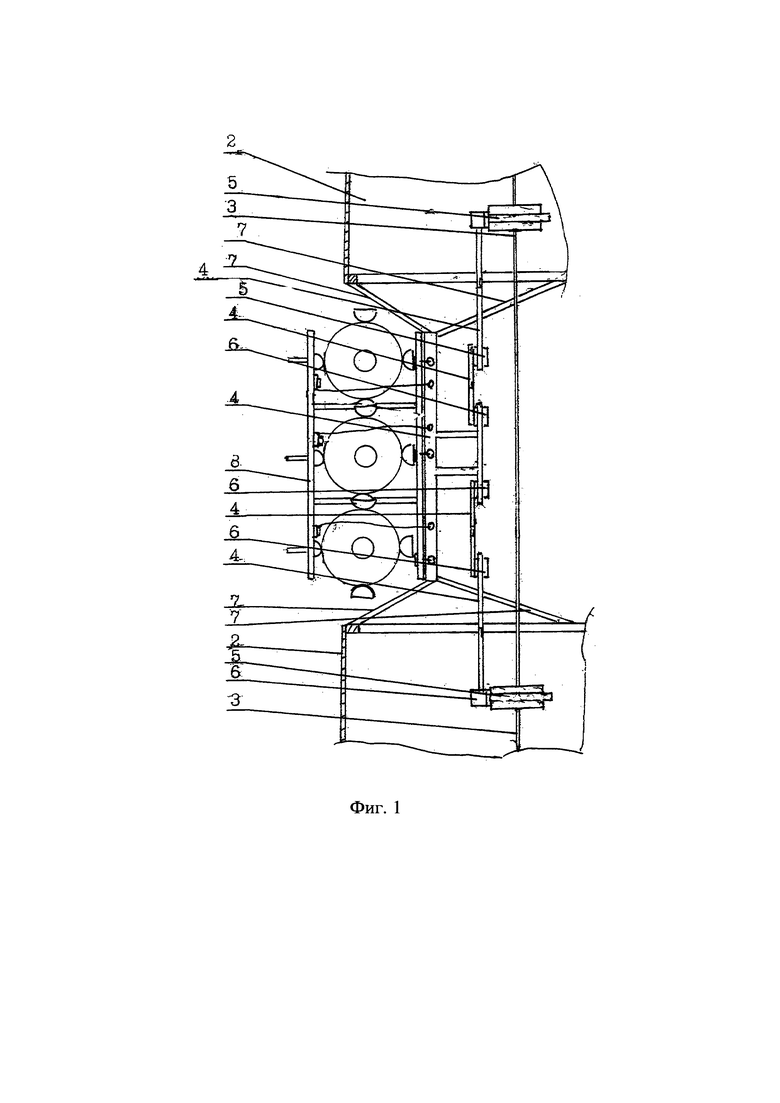
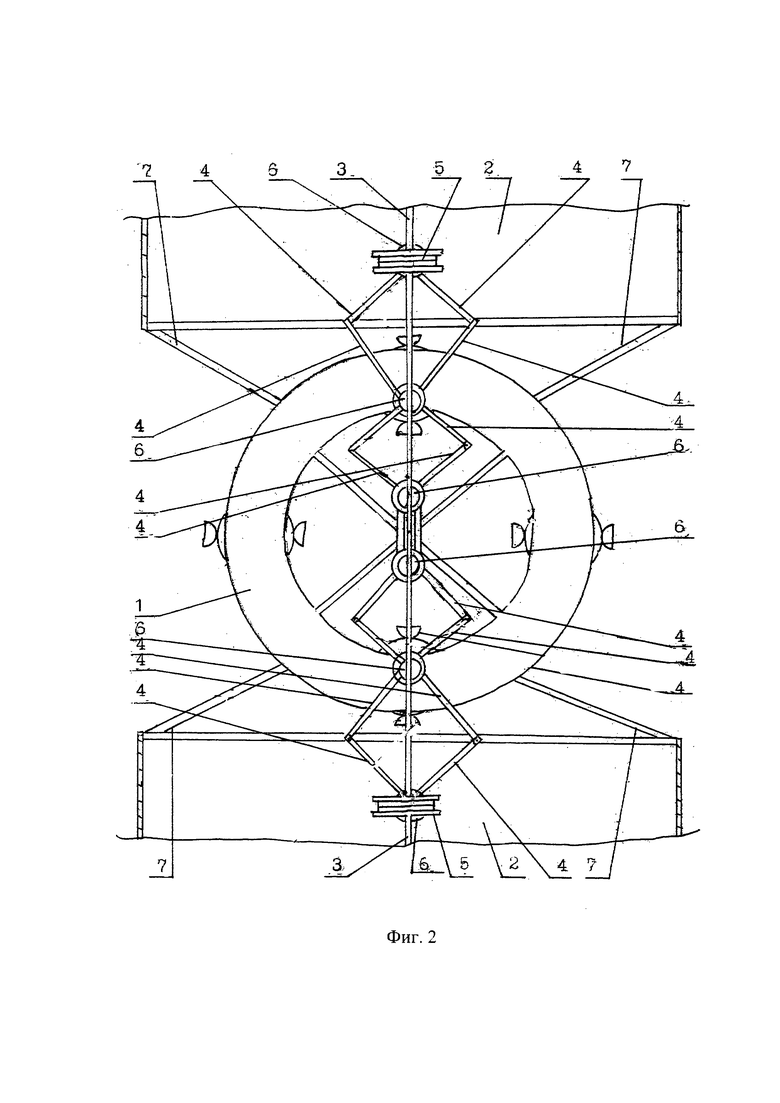
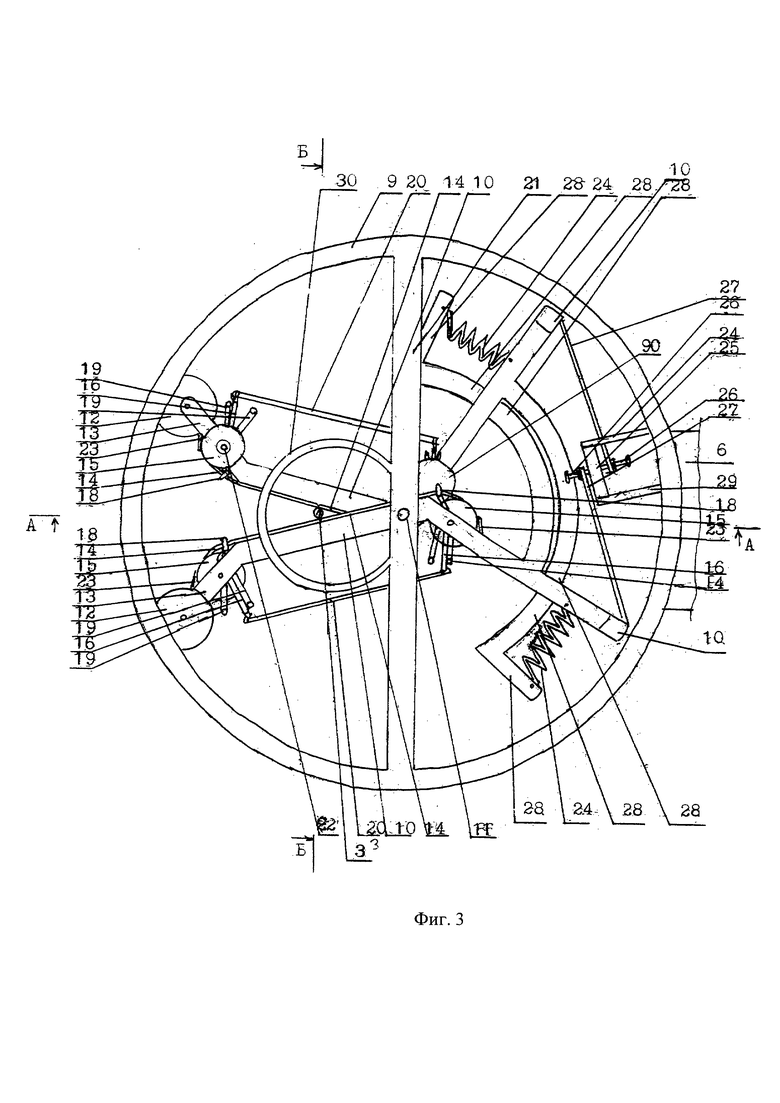
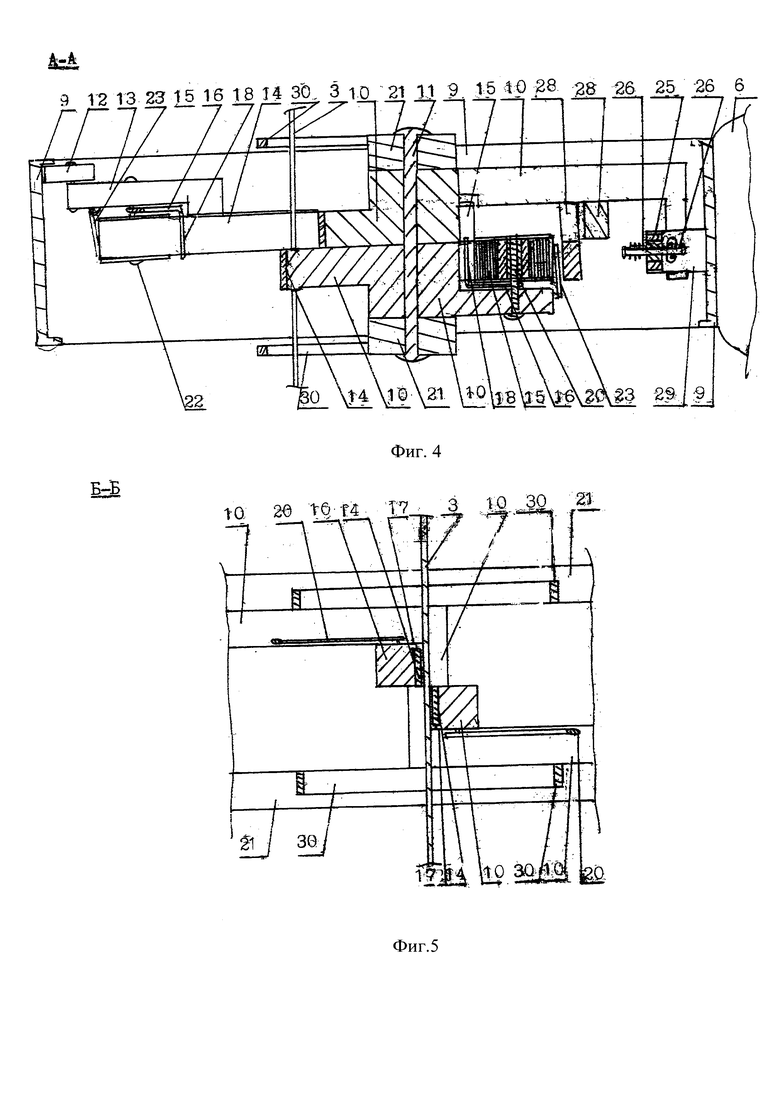
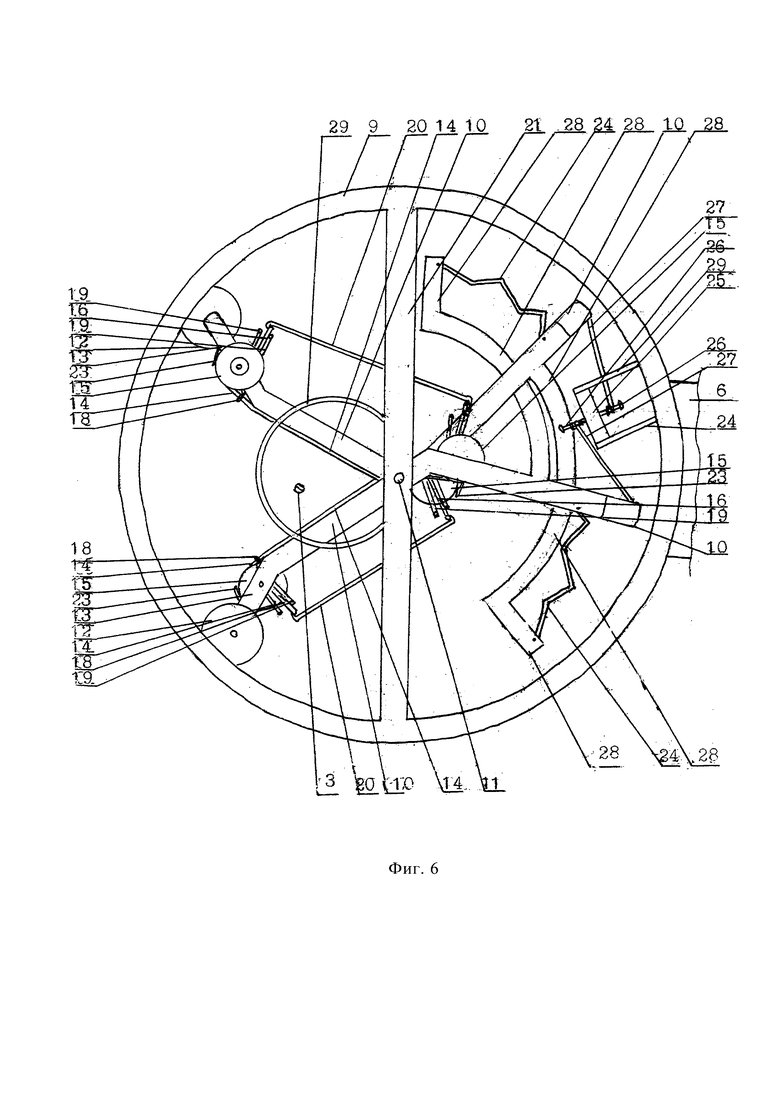
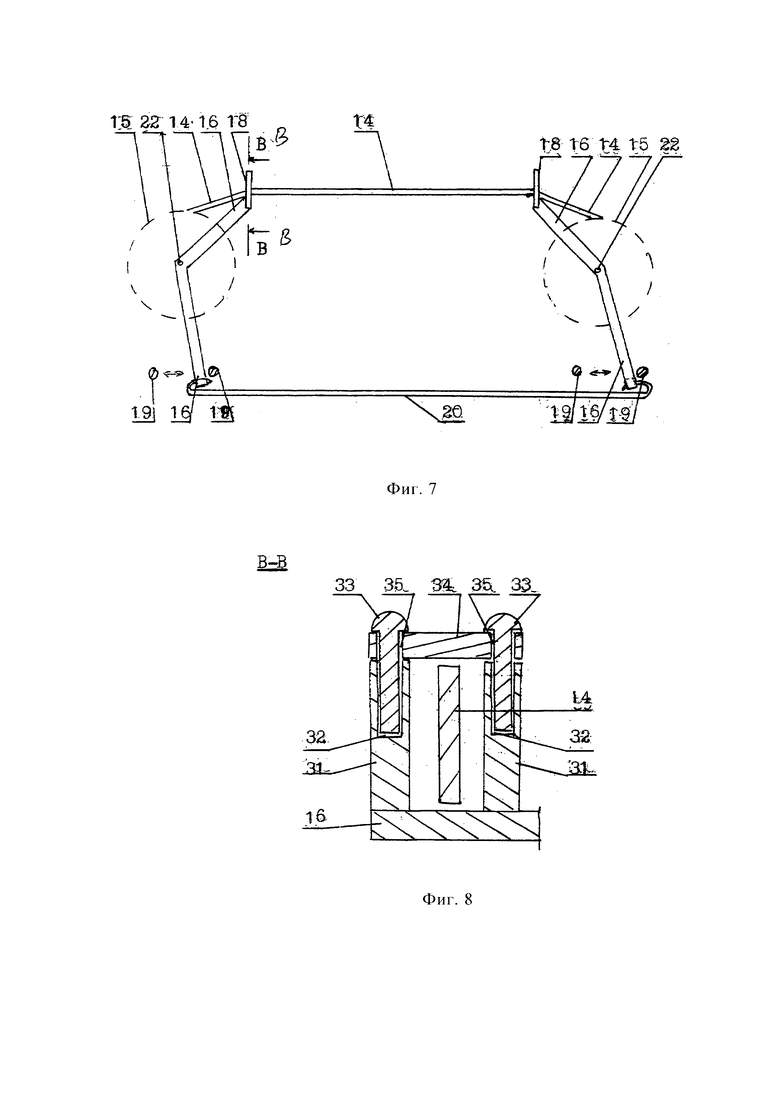
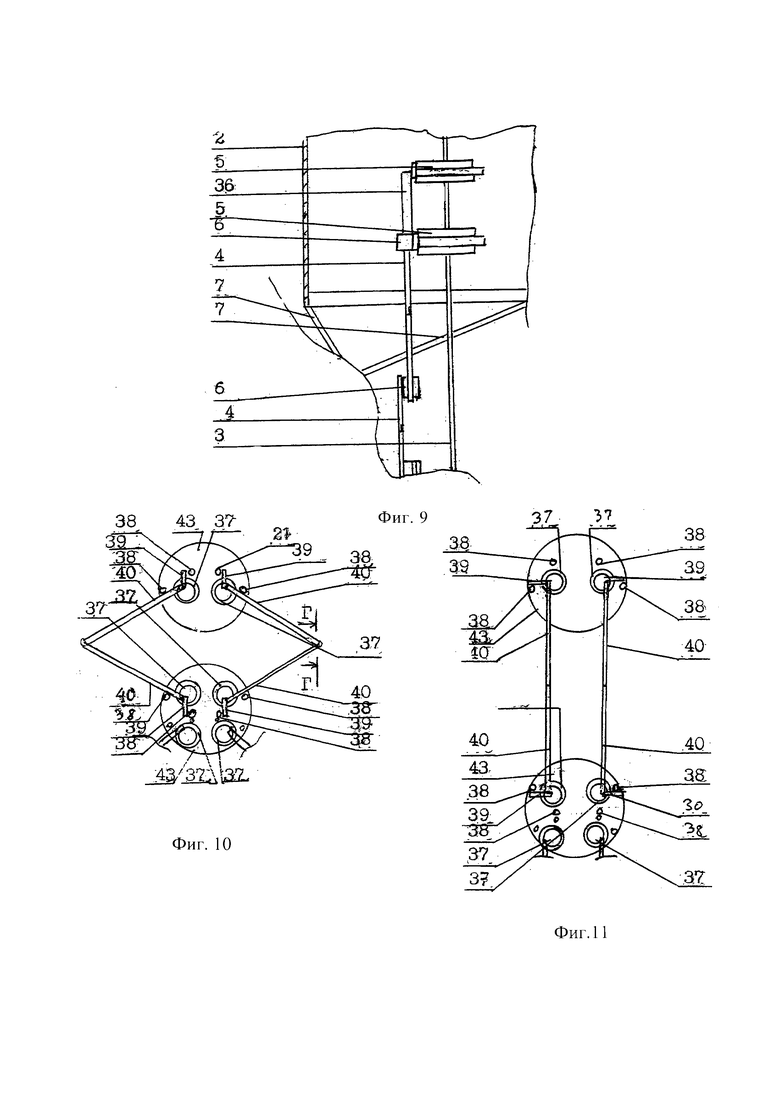
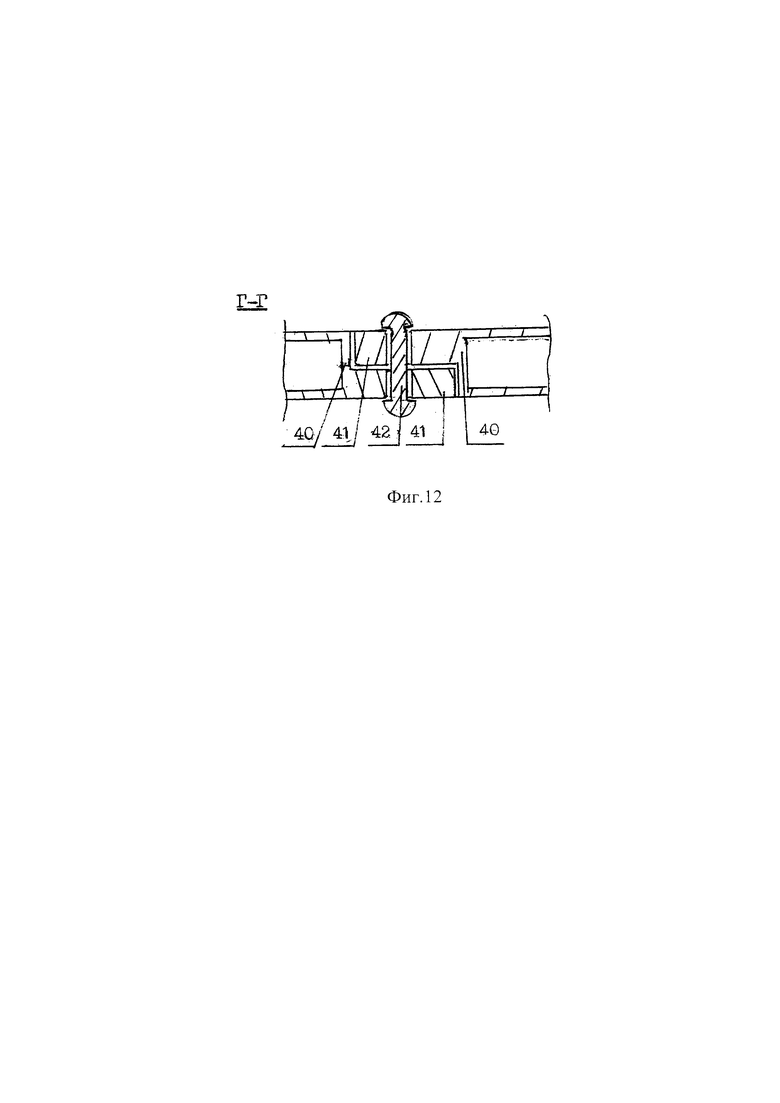
На фиг. 1 - каретка тросового космического лифта с манипулятором для перемещения вдоль троса, вид сбоку, на фиг. 2 - каретка тросового космического лифта с манипулятором для перемещения вдоль троса, вид спереди, на фиг. 3 - захват зажатого манипулятора, вид снизу, на фиг. 4 - захват зажатого манипулятора на сагиттальном срезе А-А, на фиг. 5 - захват зажатого манипулятора на фронтальном срезе Б-Б, на фиг. 6 - захват разжатого манипулятора, вид сбоку, на фиг. 7 - принцип действия регулятора направления движения ленты, на фиг. 8 - рамка рычажка для натягивания ленты в увеличенном виде на фронтальном срезе В-В, на фиг. 9 - двойной захват манипулятора на виде, аналогичном виду сбоку на фиг. 1, на фиг. 10 - схема принципа действия шарнирного многозвенника манипулятора в сдвинутом состоянии с минимальной длиной шарнирного многозвенника, на фиг. 11 - схема принципа действия шарнирного многозвенника манипулятора в раздвинутом состоянии с максимальной длиной многозвенника, на фиг. 12 - шарнирное соединение в многозвеннике на вертикальном срезе Г-Г.
Цифрами на фигурах обозначены следующие изображения.
На фиг. 1-2: 1 - корпус каретки тросового лифта, 2 - цилиндрические солнечные батареи, на фиг. 3 - трос космического лифта, 4 - раздвижные многозвенники манипулятора, 5 - захваты манипулятора, 6 - узлы многозвенников манипулятора, 7 - держатели солнечных батарей 2, 8 - стыковочное кольцо с механизмом стыковки и демпфирования колебаний.
На фиг. 3-7: 9 - большое ограничительное кольцо, 10 - пальцы захвата, 11 - ось, вокруг которой вращаются пальцы, 12 - ролики, 13 - ножки пальцев для крепления роликов, 14 - лента из фенилона или неопрена, 15 - барабаны для наматывания ленты, 16 - рычажки для натягивания ленты, 17 - бортик от соскакивания ленты, 18 - рамка рычажка 16, 19 - ограничители дальних концов рычажков, 20 - соединительная планка для рычажков 16, 21 - несущие стержни оси 11, 22 - оси электродвигателей барабанов 15, 23 - пружинящие рычажки для прижатия свернутой ленты к барабанам, 24 - пружины, сжимающие пальцы, 25 - электродвигатель для разжатия пальцев, 26 - вал электродвигателя 25, 27 - тросы, разжимающие пальцы, 28 - ответвления пальцев 10 для удержания пружин 24, 29 - ножки электродвигателя 24, 30 - малые ограничительные кольца.
На фиг. 8: 31 - вертикальные стержни, 32 - цилиндрические полости в стержнях, 33 - заглушки, 34 - горизонтальная верхняя перекладина, 35 - отверстия для заглушек 33 в перекладине 34.
На фиг. 9: 36 - неподвижная относительно захватов 5 трубка, служащая дополнительным плечом манипулятора.
На фиг. 10-12: 37 - электродвигатели в узлах многозвенников манипулятора, 38 - неподвижные упоры, 39 - подвижные упоры роторов электродвигателей 37, 40 - трубки многозвенников манипулятора, 41 - ушки трубок 39, 42 - винт с двумя головками, 43 - неподвижное основание узла 6.
Тросовый лифт Земля-Луна описан в патентах на полезную модель и на изобретение в пунктах уровня техники 1 и 2. Предлагалось ранее перемещение каретки лифта относительно троса на колесиках. Но такой способ при длительном использовании приведет к истиранию троса и его обрыву. Поэтому на фиг. 1-12 предложен рукоходный механизм перемещения вдоль троса с помощью манипулятора. Подобно тому, как две руки по очереди сжимая пальцы и разгибаясь, могут передвигаться вдоль троса, так и два двухпальцевых манипулятора способны перемещать каретку вдоль троса.
На фиг. 1-2 представлен общий вид каретки с такими манипуляторами. Стыковочное кольцо 8 с механизмом стыковки и демпфирования колебаний прикреплено к корпусу 1 каретки тросового лифта, который имеет форму кольца с перекрещивающимися в центре балками на несгибаемых ножках, опирающихся в манипулятор. Манипулятор состоит из двух рук, содержащих по два раздвижных многозвенника, выполненных в виде формирующих ромб шарнирно связанных трубок. Между многозвенниками расположены узлы 6 для управления степенью раздвижения многозвенников. На концах многозвенников расположены захваты 5, которые по очереди зажимают трос 3. К корпусу 1 на держателях 7 прикреплены цилиндрические солнечные батареи 2. Трос 3 протянут приблизительно вдоль вертикальной оси симметрии батарей. Чтобы трос не бился о батареи на дальнем конце батарей, который не показан, выполнены два радиальных стержня с кольцом, охватывающим центр окружности батарей. Через это кольцо продет трос 3.
На фиг. 3-8 показан захват манипулятора 5 крупным планом и принцип его работы.
Захват манипулятора выполнен двухпальцевым и по принципу работы подобен затупленным ножницам. Два пальца 10, вращающиеся вокруг общей оси 11, сжимают трос 3 (фиг. 3), протянутый поперек пальцев, или разжимают его и отпускают (фиг. 6). Пальцы имеют конечную длину. Чтобы трос не выскакивал на расстояние, большее длины пальцев, и не терялся имеются малые ограничительные кольца 30 с двух сторон пальцев. Для крепления к узлам 6 многозвенников манипулятора имеется большое ограничительное кольцо 9, через центр которого с осью 11 проходят несущие стержни 21 по обе стороны кольца 9. На этих стержнях на оси 11 подвешены пальцы 10 и малые ограничительные кольца 30. Пальцы 10 с одного конца имеют ножки 13, на которых подвешены вращающиеся ролики 12. При сжимании и разжимании пальцев ролики ездят по внутренней поверхности кольца 9. Это создает дополнительную точку опоры пальцам 10, предотвращает их разбалтывание. С противоположного конца пальцев выполнены ответвления пальцев 28, на концах каждого го которых имеется пружина 24, вторым концом закрепленная на противостоящем пальце. Разжатие пружин 24 приводит к сжиманию пальцев 10. Для сжатия пружин и разжимания пальцев 10 на отогнутых концах пальцев закреплены тросы 27, намотанные с двух противоположных сторон на вал 25 электродвигателя 25, который на несгибаемых ножках 29 прикреплен к большому ограничительному кольцу 9. Для прохождения одного из тросов 27 через ножку 29 в последней сделано отверстие (на фигурах не показано) с диаметром много больше диаметра троса 27. При намотке тросов 27 на вал 25 пружины 24 сжимаются, а пальцы 10 разжимаются. При отмотке тросов 27 с вала 26 пружины 24 разжимаются, а пальцы 10 сжимаются, захватывая трос 3. На удержание троса не тратится электроэнергия, используется только механическая энергия разжатия пружин 24. На удержание пальцев 10 в разжатом положении также не тратится энергия, используется стопор. Вал 26 электродвигателя 25 снабжен счетчиком оборотов и стопором (на фигурах не показан), который выполнен в виде серии цилиндрических углублений в валу 25 на одном уровне и цилиндрического углубления корпусе статора электродвигателя 25. Одно из углублений на валу и углубление в корпусе располагаются напротив друг друга при определенном положении вала 25. В углубление в корпусе вставлена кнопка с двумя соосными катушками индуктивности, одна из которых вставлена в другую. Когда счетчик оборотов вала срабатывает, по катушкам индуктивности течет возрастающий однонаправленный ток, одна катушка индуктивности выталкивает вторую катушку индуктивности с кнопкой, кнопка попадает в углубление на валу 25, которое в данный момент времени оказалось напротив углубления в корпусе, и останавливает вращение вала и намотку тросов 27. При обратном возрастающем токе в катушках индуктивности они втягиваются друг в друга, и кнопка вынимается из вала, при этом вал начинает вращаться на определенное число оборотов. Для отключения токов в катушках индуктивности применяется плавное уменьшение тока, которое не способно повлиять на положение катушек.
Описанная конструкция применима, если пальцы будут сделаны из углепластика. Если их сделать из металла, они будут надрезать трос 3. Если их сделать из мягкого пластика, он при длительных перемещениях будет истираться. В то же время более длительное использование углепластика тоже будет приводить к его истиранию и необходимости периодической замены захватов. Эта проблема решается, если для контакта пальцев 10 и троса 3 между ними вдоль верхней грани пальцев протянуть ленту 14 из фенилона или неопрена. Эти материалы применяются для изготовления рукавиц скафандров космонавтов и являются прочными к истиранию и гибкими. Тогда после каждого похода каретки тросового лифта от Земли к Луне или обратно достаточно будет заменить истершуюся ленту, а полной замены пальцев 10 или в целом захвата 5 не потребуется. Принцип установки ленты полностью подобен таковому на печатных машинках (см. фиг. 7). На два барабана 15, снабженных электродвигателями с осями 22 в центре, намотана лента 14, которая протянута через две рамки 18, связанные с рычажками 16, и далее вдоль верхней плоскости пальцев 10 (фиг. 3, 6). Рычажки 16 на противоположных дальних концах имеют ушки, в которые продеты крюки соединительной планки 20, соединяющей противоположные рычажки 16. С двух сторон от дальних концов рычажков 16 имеются по два ограничителя 19, останавливающие вращение рычажков. Лента 14 перематывается с одного барабана 15 на другой. Когда она кончается, а она привязана к электродвигателю в центре барабана, она натягивается и нажимает на рамку 18, перемещая дальний конец рычажка 16 от одного ограничителя 19 к противоположному. При этом планка 20 толкает второй рычажок 16 и перемещает его к противостоящему ограничителю 19. Поворот рычажков 16 переключает переключатель направления движения тока через электродвигатели барабанов 15, последние начинают медленно вращаться в противоположную сторону, медленно перематывая ленту обратно. В отличие от механизма движения ленты печатной машинки механизм движения ленты захватов манипулятора имеет следующие отличия. В печатной машинке вместо рамки 18 используются два параллельных стержня. В невесомости вместо стержней требуется рамка, чтобы лента не улетела. Толщина ленты 14 составляет 3-4 мм, поэтому она менее гибкая, чем лента машинки, это обеспечивает ее более стабильное положение на верхней грани пальцев 10. От сдвига ленты наружу имеется бортик 17 на половину толщины ленты, чтобы не мешать деформации верхней половины ленты тросом. Трос обеспечивает прижатие ленты 14 к пальцам 10 (фиг. 5) при сжатии троса пальцами.
Для замены ленты 14 ее требуется извлечь из рамки 18. На фиг. 8 показана лента 14 и рамка 18 крупным планом. На конце рычажка 16 установлены два вертикальных стержня 31, имеющие сверху цилиндрические углубления 32. На концах стержней выполнена перекладина 34 с отверстиями 35, через которые в углублениях 32 установлены две пластмассовые заглушки 33. Вместо заглушек 33 можно было бы применить винты, но это сделало бы их извлечение и доставание ленты из рамки 18 более длительным. Для извлечения ленты к стыковочному кольцу 8 (фиг. 1) пристыковывается спускаемый-поднимаемый аппарат, запущенный с вершины низкоорбитального космического лифта, или космический корабль, отстыкованный от станции, с манипуляторами копирующего типа, по два с каждой стороны на против манипуляторов каретки. Космонавт с помощью манипуляторов вынимает заглушки 33 из рамки и из концов осей 22 барабанов, изымает барабаны с лентой, устанавливает новые барабаны с новой лентой, устанавливает обратно заглушки.
Для создания большего количества точек крепления на тросе 3 и повышения надежности зажатия троса возможно на каждом из двух манипуляторов каретки тросового лифта установить по два захвата 5. На фиг. 9 показано изображение такое же, как на фиг. 1, но как бы оно выглядело, если бы манипуляторы имели по два захвата 5. Для этого достаточно к узлу плеча манипулятора 6 над одним из захватов прикрепить неподвижную относительно захватов 5 трубку 36, служащую дополнительным плечом манипулятора.
На фиг. 10-12 показан принцип работы многозвенника манипулятора. Рука манипулятор имеет два последовательных ромбовидных многозвенника (фиг. 1, 2). В общем случае звеньев может быть больше двух. Боковые углы ромба могут меняться по величине от острого, как показано на фиг. 10, до 180°. Трубки 40 с одного конца соединены шарнирным соединением, показанном на срезе Г-Г (фиг. 12) с другого конца неподвижно закреплены на роторах электродвигателей 37. Каждая трубка 40 имеет собственный электродвигатель в отличие от многозвенников манипулятора в уровне техники пункт 4. Это связано с необходимостью перемещать массу до двух тонн причалившего к каретке космического корабля. Электродвигатели 77 со стопорами образуют привод движений манипулятора. Каждый узел 6 многозвенника манипулятора состоит из плоского круга неподвижного относительно закрепленных на нем электродвигателей 37 основания 43 и неподвижных стержней упоров 38. На торцах каждого из роторов электродвигателей 37 неподвижно закреплен конец трубки 40 и упор 39. При повороте ротора на 90° поворачивается трубка 40 и упор 39. Два упора 38 ограничивают дальнейший поворот ротора электродвигателя 37 и трубки 40. Кроме упоров применяются стопоры, подобные стопорам на валу 25. В отличие от последних счетчик оборотов электродвигателя 37 не используется и в роторе электродвигателя 37 выполнены только два цилиндрических отверстия, соответствующие положениям упора 39 напротив упоров 38. Для фиксации кнопки в цилиндрическом углублении вала используется пружина в цилиндрическом углублении в основании 43, которая разжимается, когда кнопка попадает в цилиндрическое углубление вала и фиксирует вал. Для извлечения кнопки и сжатия пружины используются две катушки индуктивности с возрастающим противоположно направленным током, втягивающим катушки друг в друга и кнопку в цилиндрическое углубление в основании 43.
На основании 43 устанавливаются по четыре электродвигателя 37 для четырех трубок 40 локтевого сустава манипулятора и по два электродвигателя 37 для двух трубок 40 плечевого сустава и запястья манипулятора.
На срезе Г-Г на фиг. 12 показано подробно шарнирное соединение двух трубок 40. На концах трубок выполнены ушки 41, имеющие высоту в половину высоты трубки, в них продет винт с двумя головками 42. Чтобы головки не скручивались с винта при движении манипулятора, они припаяны к нему или выполнены цельнонапечатанными на 3d-принтере.
На фиг. 1-12 для наглядности конструкций не показаны провода электропроводки к двигателям 25, 37 и двигателям барабанов 15. Провода протягиваются внутри держателей 7, корпуса 1, трубок 40, вдоль оснований 43, вдоль ножек 29, по периметру внутри кольца 9 и вдоль стержней 21, с боков пальцев 10, внутри осей 22. В местах сгиба они имеют припуски, в местах вращения щеточные или бесщеточные контакты.
В пункте 1 уровня техники упомянут промежуточный терминал с дополнительным тросом длиной 80000 км. То есть при использовании каретки лифта возникает необходимость перегрузки груза на каретку дополнительного троса. Захваты 5 тяжело переместить с троса на трос, которые не соединены между собой. Эта проблема решается путем отстыковки от каретки космического аппарата и короткого его перелета на реактивных двигателях с пристыковкой к каретке дополнительного троса.
Изобретение относится к элементам тросовых систем, в частности к средствам для перемещения каретки тросового космического лифта (ТКЛ). Корпус предлагаемого манипулятора (М) является кареткой ТКЛ и имеет две руки, каждая из которых выполнена из двух трубчатых конструкций, соединенных по схеме шарнирных ромбов с переменными углами при вершине. В узлах между ромбами установлены электродвигатели со стопорящимися (по командам или программе) роторами. Конструкции захватов рук М содержат большие и малые ограничительные кольца, пары пальцев с ответвлениями и закрепленными на них пружинами. Между пальцами зажимается трос ТКЛ. Сжатие и разжатие пальцев синхронизировано с перемещением каретки вдоль троса, причем трос поочередно зажимается захватами двух рук М так, что руки одновременно то распрямляются, то сжимаются. Для смягчения захвата и уменьшения истирания троса используется движущаяся вдоль плоскостей захвата лента из фенилона или неопрена. Техническим результатом является повышение долговечности, энергетических и эксплуатационных характеристик тросовой системы с предложенным М. 3 з.п. ф-лы, 12 ил.
1. Манипулятор для движения каретки тросового лифта вдоль троса, включающий корпус, привод движений, захват, шарнирный многозвенник, соединяющий захват с корпусом, отличающийся тем, что корпус является кареткой тросового лифта, шарнирный многозвенник каждой из двух рук манипулятора выполнен в форме двух шарнирно соединенных трубчатых конструкций, образующих по форме ромбы с переменными углами с возможностью изменения угла от острого до угла в 180°, с превращением ромба в параллельные прямые, причем в узлах вершин ромбов расположены электродвигатели с прикрепленными к каждому их ротору трубки многозвенника с возможностью стопорения роторов и трубок в двух положениях острого угла у шарнира многозвенника: 20°-45° и угла 160°-180°, в узлах между ромбами установлено по четыре упомянутых электродвигателя, в узлах возле захватов и возле корпуса установлено по два упомянутых электродвигателя, при этом электродвигатели со стопорами и упорами образуют привод движений рук манипулятора, захват каждой руки манипулятора выполнен в форме большого ограничительного кольца, на несущих стержнях, проходящих через центр большого ограничительного кольца, закреплены малые ограничительные кольца и посередине - ось с подвижно закрепленными на ней двумя пальцами с возможностью зажатия между пальцами лифтового троса, с одного конца пальцы имеют ножки с закрепленными на них роликами, имеющими возможность перекатывания по внутренней поверхности большого ограничительного кольца, с другого конца пальцы имеют ответвления с закрепленными на них пружинами, один конец которых прикреплен к пальцу, а второй конец - к ответвлению противоположного пальца, и имеют загибы с закрепленными на них тросами, намотанными на стопорящийся вал электродвигателя, закрепленного на ножках на большом ограничительном кольце с отверстием для троса в одной из ножек, с возможностью сжатия пальцев при отмотке тросов и разжатии пружин и разжатия пальцев при намотке тросов с последующим стопорением вала электродвигателя тросов и сжатии пружин, причем пружины и последние электродвигатели со стопорами и тросами образуют привод движений захватов манипулятора, корпус манипулятора снабжен двумя цилиндрическими солнечными батареями, каждая из которых с одного конца соединена держателями с корпусом, а со второго конца содержит стержни с закрепленным на них, в центре симметрии окружности цилиндра, ограничительным кольцом для троса лифта, при этом манипулятор выполнен с возможностью поочередного зажатия захватами двух рук троса с движением каретки вдоль троса так, что руки одновременно то распрямляются, то сжимаются.
2. Манипулятор для движения каретки тросового лифта вдоль троса по п.1, отличающийся тем, что каждая его рука имеет по два захвата описанной конструкции.
3. Манипулятор для движения каретки тросового лифта вдоль троса по п.1, отличающийся тем, что каждый палец захвата со стороны троса содержит ленту медленного движения из фенилона толщиной 3-4 мм, при этом каждый палец содержит бортик от соскакивания ленты высотой в половину толщины ленты со стороны, противоположной от стороны зажимания ленты, лента каждого пальца снабжена с концов барабанами с электродвигателями и механизмами изменения направления движения ленты и натягивания ленты с возможностью смены барабанов с лентой после ее истирания.
4. Манипулятор для движения каретки тросового лифта вдоль троса по п.1, отличающийся тем, что каждый палец захвата со стороны троса содержит ленту медленного движения из неопрена толщиной 3-4 мм, при этом каждый палец содержит бортик от соскакивания ленты высотой в половину толщины ленты со стороны, противоположной от стороны зажимания ленты, лента каждого пальца снабжена с концов барабанами с электродвигателями и механизмами изменения направления движения ленты и натягивания ленты с возможностью смены барабанов с лентой после ее истирания.
| МАНИПУЛЯТОР | 2018 |
|
RU2693963C1 |
| Итоги науки и техники | |||
| Ракетостроение и космическая техника, т.12 | |||
| ВИНИТИ, 1991, с.159-163 | |||
| US 7681840 B1, 23.03.2010 | |||
| KR 1020070113934 A, 29.11.2007 | |||
| СПОСОБ МЕЖОРБИТАЛЬНОЙ ТРАНСПОРТИРОВКИ ПОЛЕЗНЫХ ГРУЗОВ | 2009 |
|
RU2404091C1 |
| Космическая лифтовая система Луна - Земля | 2016 |
|
RU2665107C2 |

