Изобретение относится к подъемно - транспортным машинам для проведения погрузочно-разгрузочных и прочих работ, выполняемых мобильными подъемно-транспортными агрегатами с ограниченной грузоподъемностью.
Известен кран-манипулятор, содержащий смонтированное на транспортном средстве поворотное в вертикальной плоскости основание в виде плоской треугольной фермы и три гидроцилиндра, корпуса которых шарнирно закреплены на вершинах основания, а штоки всех трех гидроцилиндров соединены между собой и с грузозахватным органом, при этом для поворота основания предусмотрено два гидроцилиндра, штоки которых закреплены на обращенной вверх стороне основания, при этом вершина основания, противолежащая упомянутой стороне основания, снабжена горизонтальной балкой, параллельной этой стороне основания, гидроцилиндры поворота основания расположены параллельно друг другу, их штоки закреплены на вершинах основания, соединенных между собой верхней его стороной, при этом между горизонтальной балкой и наклонными сторонами основания расположены укосины, при этом упомянутая горизонтальная балка соединена с фермой, установленной на вертикальных стойках, охватывающих кабину и закрепленных на раме транспортного средства (RU Патент РФ №2207317, опубл. 2003).
Известен кран-манипулятор, содержащий основание, выполненное в виде треугольной фермы, состоящей из двух силовых гидроцилиндров и жесткой траверсы, на которой шарнирно смонтированы стержни и силовые гидроцилиндры составляющие конструкцию стрелы с грузонесущим органом, при этом стержни составляющие конструкцию стрелы одними концами сходятся в месте крепления грузонесущего органа, а другими концами два стержня стрелы крепятся опорно-поворотными устройствами к жесткой траверсе основания и один стержень стрелы монтируется на передней верхней направляющей передней стойки четырехгранной фермы, все стержни конструкции стрелы закреплены без возможности регулирования по длине, при этом установленные два силовых гидроцилиндра расположены под углом у друг к другу, который зависит от размеров конструкции, при этом два силовых гидроцилиндра штоками сходятся в общем сферическом шарнире, который своими цапфами монтируется на передней верхней направляющей передней стойки четырехгранной фермы, при этом основание двух силовых гидроцилиндров крепится посредством опорно-поворотных устройств к жесткой траверсе основания, поворот стрелы с грузонесущим органом на определенный угол регулируется работой силовых гидроцилиндров и дополнительных параллельных друг другу силовых гидроцилиндров, при этом для большего поворота стрелы дополнительные параллельные силовые гидроцилиндры работают поочередно друг относительно друга, при этом подъем и опускание стрелы с грузонесущим органом регулируется синхронной работой дополнительных параллельных силовых гидроцилиндров, штоки которых с помощью цилиндрических шарниров крепятся к жесткой траверсе основания, а концами параллельные силовые гидроцилиндры монтируются на задней верхней направляющей задней стойки четырехгранной фермы, задние стойки четырехгранной фермы опираются жестко на парные стойки-укосины, выполненные с возможностью крепления на транспортном средстве (RU Патент №2725367, опубл. 2019).
Известен кран-манипулятор, содержащий основание, выполненное в виде четырехгранной фермы, на которой шарнирно смонтирована с возможностью поворота посредством двух силовых гидроцилиндров шарнирно-стержневая стрела с грузонесущим органом, выполненная в виде фермы, состоящей из треугольных шарнирно-стержневых соединений, при этом установленные два силовых гидроцилиндра шарнирно-стержневой стрелы расположены под углом а друг к другу, который зависит от размеров конструкции, при этом два силовых гидроцилиндра имеют общий сферический шарнир с цапфами, соединенными с соответствующими фермами стрелы, при этом шарнирно-стержневая стрела и ее силовые гидроцилиндры закреплены на основании посредством опорно-поворотных устройств, стержни всех треугольников конструкции стрелы закреплены без возможности регулирования по длине, поворот стрелы с грузонесущим органом на определенный угол регулируется работой силовых гидроцилиндров, подъем и опускание стрелы с грузонесущим органом регулируется двумя параллельными синхронными гидроцилиндрами, которые штоками крепятся к вершинам основания с помощью цилиндрических шарниров, а нижними концами монтируются в вершинах четырехгранной фермы, передние стойки и задние стойки четырехгранной фермы опираются жестко на парные стойки-упоры, выполненные с возможностью крепления на транспортном средстве (RU Патент №2722762, опубл. 2019).
Недостатками известных технических решений является недостаточное оптимальное распределение нагрузок и функциональных возможностей крана-манипулятора.
Техническая проблема - не обеспечиваются достаточное оптимальное распределение нагрузок и достаточные функциональные возможности крана-манипулятора.
Технический результат - обеспечение достаточного распределение нагрузок и достаточных функциональных возможностей крана-манипулятора.
Технический результат достигается краном-манипулятором, содержащий основание, выполненное в виде треугольной фермы, на котором шарнирно смонтирована с возможностью поворота шарнирно-стержневая стрела, выполненная в виде шарнирно-стержневых ферм, шарнирно-стержневые фермы, составляющие конструкцию стрелы имеют вид стержневых треугольников с плоскими фермами в поперечном направлении, при этом два силовых гидроцилиндра треугольной фермы основания шарнирно-стержневой стрелы образуют друг с другом угол ε, изменяемый в зависимости от размеров конструкции, а своими штоками упомянутые силовые гидроцилиндры сходятся в общем пространственном шарнире, который посредством цапф крепится на переднем верхнем брусе п-образной фермы, при этом своими основаниями упомянутые силовые гидроцилиндры крепятся посредством поворотных опор к жесткой поперечине основания треугольной фермы, при этом к этой же жесткой поперечине основания треугольной фермы шарнирно одним концом крепятся телескопические стержни, при этом телескопические стержни способны изменяться по длине на необходимое значение длины в процессе работы шарнирно-стержневой стрелы, при этом другим концом телескопические стержни посредством поворотных опор крепятся к заднему брусу п-образной фермы, при этом шарнирно-стержневая стрела выполнена в виде треугольных соединений из стержней и в основании двух треугольных соединений параллельно друг другу размещены два силовых гидроцилиндра, а сторонами этих треугольных соединений служат стержни и упомянутые ранее силовые гидроцилиндры треугольной фермы, при этом основания двух параллельных друг другу силовых гидроцилиндров закреплены в поворотных опорах, которые в свою очередь расположены на переднем верхнем брусе п-образной фермы, а штоки упомянутых двух параллельных друг другу силовых гидроцилиндров крепятся шарнирно к поперечине основания плоской фермы стрелы, при этом составляющие п-образную ферму брусья имеют утолщенные размеры, а опирается конструкция п-образной фермы на парные подпорки, которые в свою очередь жестко связаны с транспортным средством, при этом на верхней поперечине плоской фермы шарнирно-стержневой стрелы шарнирно крепится основание силового гидроцилиндра, при этом шток упомянутого силового гидроцилиндра шарнирно крепится в вершине рычага выполненного в форме жесткого стержневого треугольника, при этом основанием упомянутого рычага в форме жесткого стержневого треугольника является поперечина, которая так же является окончанием плоской фермы шарнирно-стержневой стрелы, при этом рычаг в форме жесткого стержневого треугольника через упомянутую поперечину связан с грузозахватным органом, при этом грузозахватный орган представляет собой захват вилочного типа, при этом упомянутый захват вилочного типа состоит из рамы и размещенных в ее основании лап, при этом оптимальное распределение нагрузок на стержни и плоские фермы стрелы достигается совместной работой телескопического стержня со всеми силовыми гидроцилиндрами, а так же расширяются функциональные возможности крана-манипулятора.
Изобретение поясняется чертежами.
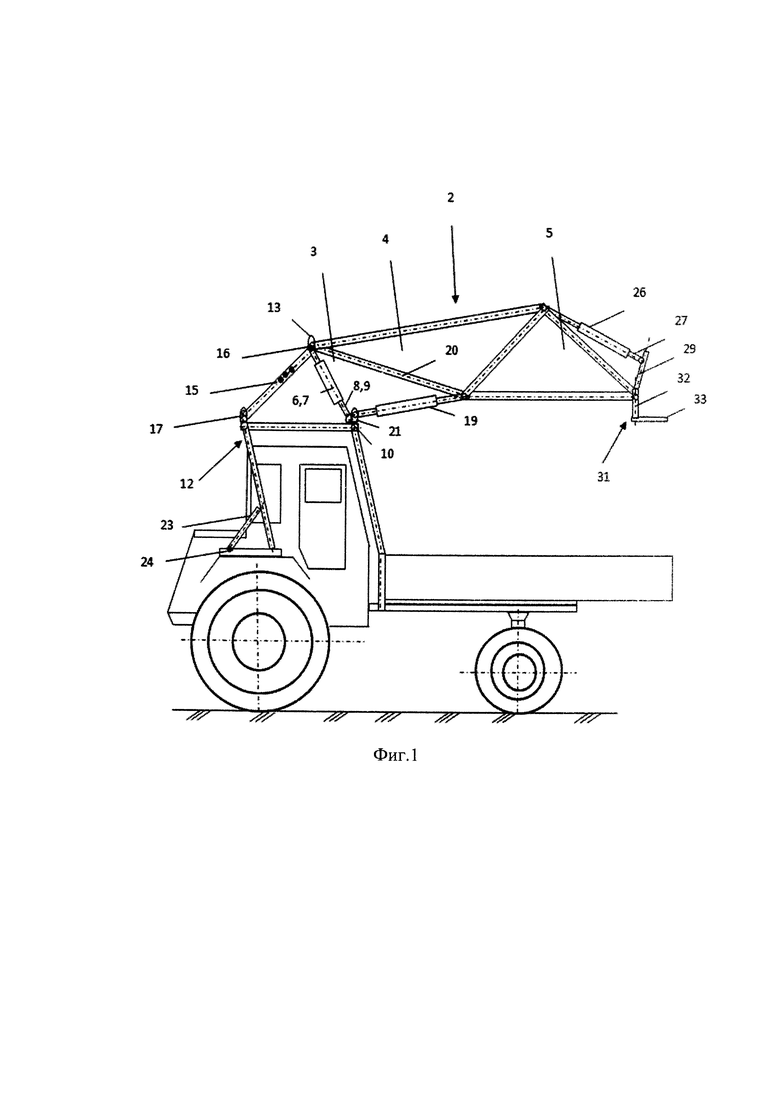
На фигуре 1 схематично представлен кран-манипулятор с возможностью установки его на транспортное средство, общий вид.
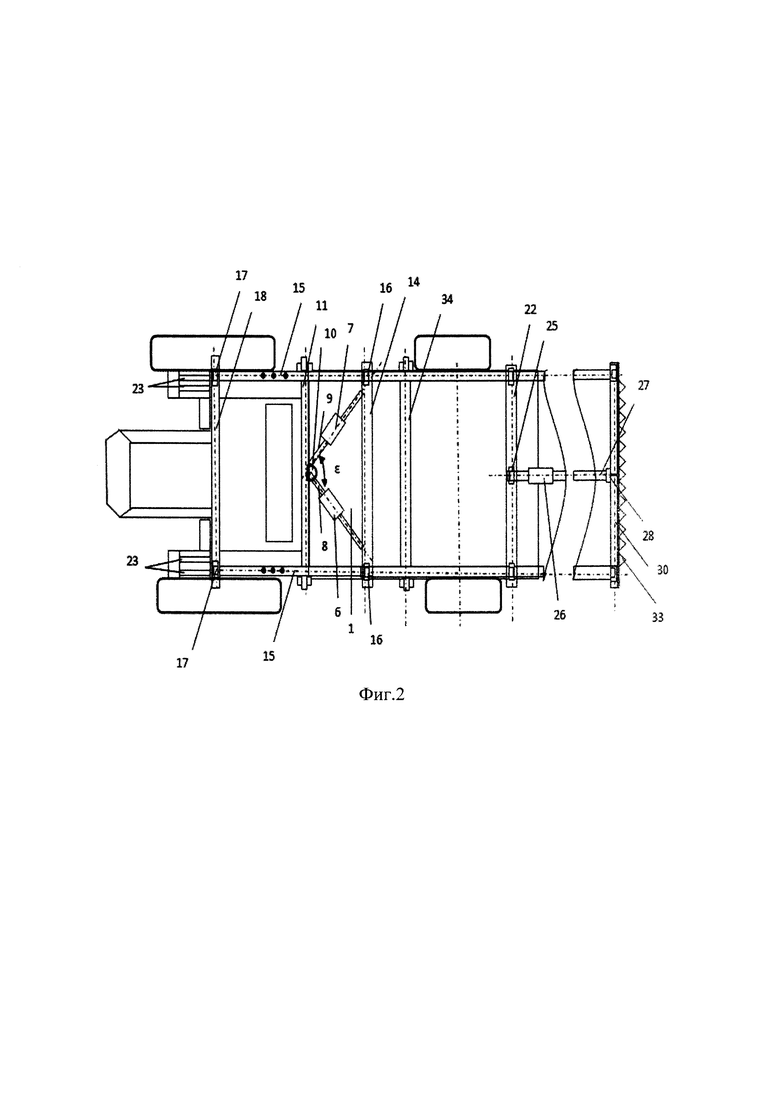
На фигуре 2 изображен вид сверху.
Сведения, подтверждающие возможность реализации заявленного изобретения заключаются в следующем.
Кран-манипулятор, содержит основание 1, выполненное в виде треугольной фермы, на котором шарнирно смонтирована с возможностью поворота шарнирно-стержневая стрела 2, выполненная в виде шарнирно-стержневых ферм 3, 4, 5. Шарнирно-стержневые фермы 3, 4, 5, составляющие конструкцию стрелы 2 имеют вид стержневых треугольников с плоскими фермами в поперечном направлении. Два силовых гидроцилиндра 6, 7 треугольной фермы основания 1 шарнирно-стержневой стрелы 2 образуют друг с другом угол е, изменяемый в зависимости от размеров конструкции, а своими штоками 8,9 упомянутые силовые гидроцилиндры 6, 7 сходятся в общем пространственном шарнире 10, который посредством цапф крепится на переднем верхнем брусе 11 п-образной фермы 12. Своими основаниями упомянутые силовые гидроцилиндры 6, 7 крепятся посредством поворотных опор 13 к жесткой поперечине 14 основания 1 треугольной фермы. К этой же жесткой поперечине 14 основания 1 треугольной фермы шарнирно 16 одним концом крепятся телескопические стержни 15. Телескопические стержни 15 способны изменяться по длине на необходимое значение длины в процессе работы шарнирно-стержневой стрелы 2. Другим концом телескопические стержни 15 посредством поворотных опор 17 крепятся к заднему брусу 18 п-образной фермы 12. Шарнирно-стержневая стрела 2 выполнена в виде треугольных соединений 3, 4, 5 из стержней и в основании двух треугольных соединений 3 параллельно друг другу размещены два силовых гидроцилиндра 19, а двумя сторонами этих треугольных соединений служат стержни 20 и упомянутой ранее силовые гидроцилиндры 6, 7 треугольной фермы. Основание двух параллельных друг другу силовых гидроцилиндров 19 закреплены в поворотных опорах 21, которые в свою очередь расположены на переднем верхнем брусе 11 п-образной фермы 12, а штоки упомянутых двух параллельных друг другу силовых гидроцилиндров 19 крепятся шарнирно к поперечине 34 основания плоской фермы стрелы. Составляющие п-образную ферму 12 брусья имеют утолщенные размеры, а опирается конструкция п-образной фермы 12 на парные подпорки 23, которые в свою очередь жестко связаны с транспортным средством 24. На верхней поперечине 22 плоской фермы шарнирно-стержневой стрелы 2 шарнирно 25 крепится основание силового гидроцилиндра 26. Шток 27 упомянутого силового гидроцилиндра 26 шарнирно 28 крепится в вершине рычага 29 выполненного в форме жесткого стержневого треугольника. Основанием упомянутого рычага 29 в форме жесткого стержневого треугольника является поперечина 30, которая так же является окончанием плоской фермы шарнирно-стержневой стрелы 2. Рычаг 29 в форме жесткого стержневого треугольника через упомянутую поперечину 30 связан с грузозахватным органом 31. Грузозахватный орган 31 представляет собой захват вилочного типа. Упомянутый захват вилочного типа состоит из рамы 32 и размещенных в ее основании лап 33. Оптимальное распределение нагрузок на стержни и плоские фермы стрелы достигается совместной работой телескопических стержней 15 со всеми силовыми гидроцилиндрами 6, 7, 19, 26, а так же расширяются функциональные возможности крана-манипулятора.
Кран-манипулятор работает следующим образом.
Синхронной работой двух параллельных силовых гидроцилиндров 19 сообщается подъем и опускание, а так же изменение вылета шарнирно-стержневой стрелы 2. Работа шарнирно-стержневой стрелы 2 и ее поворот на заданный оператором угол е, обеспечивается одновременной или поочередной работой силовых гидроцилиндров 6, 7. Работой параллельных друг другу силовых гидроцилиндров 19 регулируется процесс изменения величины выноса окончания шарнирно-стержневой стрелы 2 совместно с грузозахватным органом 31 представляющий собой захват вилочного типа. Совместной работой силовых гидроцилиндров 6, 7 и двух параллельных друг другу силовых гидроцилиндров 19, а также изменением длины телескопических стержней 15 регулируется процесс поворота на больший угол подъема и опускания груза грузозахватным органом 31. В пространственном шарнире 10 совершается взаимное перемещение штоков 9 силовых гидроцилиндров 6, 7 друг относительно друга и относительно плоскости шарнирно-стержневой стрелы 2. Треугольная ферма основания 1 обеспечивает жесткую связь с конструкцией шарнирно-стержневой стрелы 2. При включении в работу силового гидроцилиндра 26 шток 27 шарнирно 28 закрепленный в вершине рычага 29 в форме жесткого стержневого треугольника своим давлением приводит в движение рычаг 29, который связан с поперечиной 30 окончания плоской фермы шарнирно-стержневой стрелы 2. От воздействия рычага 29 в форме жесткого стержневого треугольника через упомянутую поперечину 30 приходит в движение грузозахватный орган 31, который представляет собой захват вилочного типа, состоящий из рамы 32 и размещенных в ее основании лап 33. Конструкция шарнирно-стержневой стрелы 2 базируется на п-образной ферме 12, составляющие брусья которой для жесткости имеют утолщенные размеры, а опирается конструкция п-образной фермы 12 для устойчивости на парные подпорки 23, которые в свою очередь жестко связаны с транспортным средством 24.
Таким образом, обеспечивается как оптимальное распределение нагрузок на элементы стрелы, так и расширение функциональных возможностей крана-манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран-манипулятор | 2021 |
|
RU2760370C1 |
| Кран-манипулятор | 2019 |
|
RU2722762C1 |
| Кран-манипулятор | 2022 |
|
RU2776888C1 |
| Кран-манипулятор | 2019 |
|
RU2725367C1 |
| Стрела грузоподъемного средства | 2022 |
|
RU2784541C1 |
| СТРЕЛА ГРУЗОПОДЪЕМНОГО СРЕДСТВА | 2000 |
|
RU2178382C1 |
| Стрела грузоподъемного средства | 2021 |
|
RU2760371C1 |
| Малогабаритный электропогрузчик со стреловым грузоподъемным устройством | 2021 |
|
RU2768058C1 |
| СТРЕЛА ГРУЗОПОДЪЕМНОГО СРЕДСТВА | 2003 |
|
RU2231494C1 |
| КРАН-МАНИПУЛЯТОР | 2001 |
|
RU2207317C1 |
Изобретение относится к подъемно-транспортным машинам для проведения погрузочно-разгрузочных и прочих работ, выполняемых мобильными подъемно-транспортными агрегатами с ограниченной грузоподъемностью. Кран-манипулятор содержит основание, выполненное в виде треугольной фермы, на котором шарнирно смонтирована с возможностью поворота шарнирно-стержневая стрела, выполненная в виде шарнирно-стержневых ферм, шарнирно-стержневые фермы, составляющие конструкцию стрелы, имеют вид стержневых треугольников с плоскими фермами в поперечном направлении. Два силовых гидроцилиндра треугольной фермы основания шарнирно-стержневой стрелы образуют друг с другом угол ε, изменяемый в зависимости от размеров конструкции, а своими штоками силовые гидроцилиндры сходятся в общем пространственном шарнире, который посредством цапф крепится на переднем верхнем брусе п-образной фермы. Своими основаниями силовые гидроцилиндры крепятся посредством поворотных опор к жесткой поперечине основания треугольной фермы. К этой же жесткой поперечине основания треугольной фермы шарнирно одним концом крепятся телескопические стержни. Другим концом телескопические стержни шарнирно крепятся к заднему брусу п-образной фермы. Шарнирно-стержневая стрела выполнена в виде треугольных соединений из стержней, и в основании двух треугольных соединений параллельно друг другу размещены два силовых гидроцилиндра, а сторонами этих треугольных соединений служат стержни и силовые гидроцилиндры треугольной фермы. Основания двух параллельных друг другу силовых гидроцилиндров закреплены в поворотных опорах, которые расположены на переднем верхнем брусе п-образной фермы, а штоки двух параллельных друг другу силовых гидроцилиндров крепятся шарнирно к поперечине основания плоской фермы стрелы. Составляющие п-образную ферму брусья имеют утолщенные размеры, а опирается конструкция п-образной фермы на парные подпорки, которые в свою очередь жестко связаны с транспортным средством. На верхней поперечине плоской фермы шарнирно-стержневой стрелы шарнирно крепится основание силового гидроцилиндра. Шток силового гидроцилиндра шарнирно крепится в вершине рычага, выполненного в форме жесткого стержневого треугольника. Основанием рычага в форме жесткого стержневого треугольника является поперечина, которая так же является окончанием плоской фермы шарнирно-стержневой стрелы. Рычаг в форме жесткого стержневого треугольника через поперечину связан с грузозахватным органом. Обеспечивается оптимальное распределение нагрузок на элементы шарнирно-стержневой стрелы и достаточные функциональные возможности крана-манипулятора. 2 ил.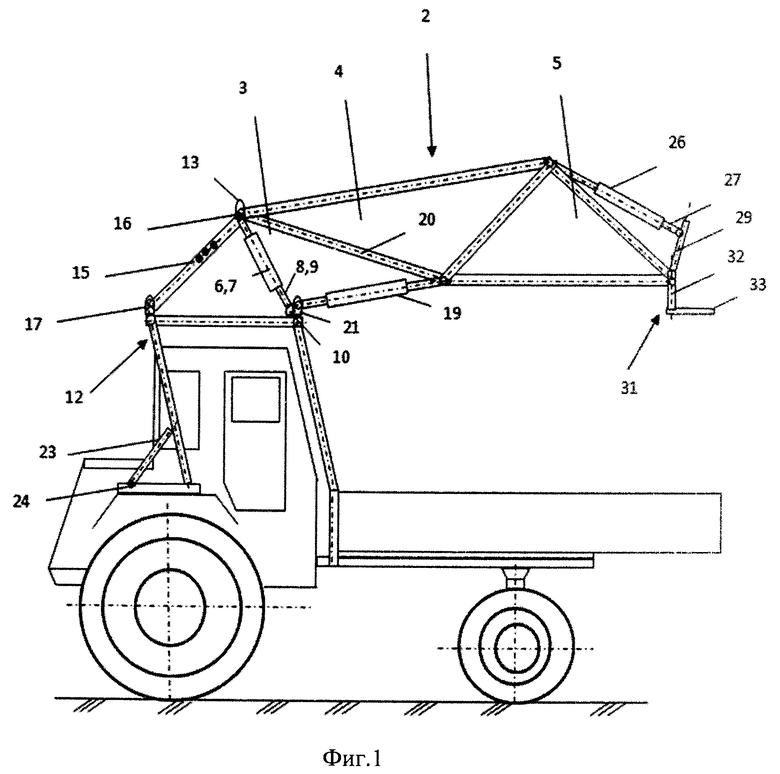
Кран-манипулятор, содержащий основание, выполненное в виде треугольной фермы, на котором шарнирно смонтирована с возможностью поворота шарнирно-стержневая стрела, выполненная в виде шарнирно-стержневых ферм, шарнирно-стержневые фермы, составляющие конструкцию стрелы, имеют вид стержневых треугольников с плоскими фермами в поперечном направлении, отличающийся тем, что два силовых гидроцилиндра треугольной фермы основания шарнирно-стержневой стрелы образуют друг с другом угол ε, изменяемый в зависимости от размеров конструкции, а своими штоками упомянутые силовые гидроцилиндры сходятся в общем пространственном шарнире, который посредством цапф крепится на переднем верхнем брусе п-образной фермы, при этом своими основаниями упомянутые силовые гидроцилиндры крепятся посредством поворотных опор к жесткой поперечине основания треугольной фермы, при этом к этой же жесткой поперечине основания треугольной фермы шарнирно одним концом крепятся телескопические стержни, при этом телескопические стержни способны изменяться по длине на необходимое значение длины в процессе работы шарнирно-стержневой стрелы, при этом другим концом телескопические стержни шарнирно крепятся к заднему брусу п-образной фермы, при этом шарнирно-стержневая стрела выполнена в виде треугольных соединений из стержней и в основании двух треугольных соединений параллельно друг другу размещены два силовых гидроцилиндра, а сторонами этих треугольных соединений служат стержни и упомянутые ранее силовые гидроцилиндры треугольной фермы, при этом основания двух параллельных друг другу силовых гидроцилиндров закреплены в поворотных опорах, которые в свою очередь расположены на переднем верхнем брусе п-образной фермы, а штоки упомянутых двух параллельных друг другу силовых гидроцилиндров крепятся шарнирно к поперечине основания плоской фермы стрелы, при этом составляющие п-образную ферму брусья имеют утолщенные размеры, а опирается конструкция п-образной фермы на парные подпорки, которые в свою очередь жестко связаны с транспортным средством, при этом на верхней поперечине плоской фермы шарнирно-стержневой стрелы шарнирно крепится основание силового гидроцилиндра, при этом шток упомянутого силового гидроцилиндра шарнирно крепится в вершине рычага, выполненного в форме жесткого стержневого треугольника, при этом основанием упомянутого рычага в форме жесткого стержневого треугольника является поперечина, которая так же является окончанием плоской фермы шарнирно-стержневой стрелы, при этом рычаг в форме жесткого стержневого треугольника через упомянутую поперечину связан с грузозахватным органом, при этом грузозахватный орган представляет собой захват вилочного типа, при этом упомянутый захват вилочного типа состоит из рамы и размещенных в ее основании лап, при этом оптимальное распределение нагрузок на стержни и плоские фермы стрелы достигается совместной работой телескопического стержня со всеми силовыми гидроцилиндрами, а так же расширяются функциональные возможности крана-манипулятора.
| Кран-манипулятор | 2022 |
|
RU2776888C1 |
| Устройство для измерения температурной зависимости внутреннего трения и модуля сдвига твердых тел | 1960 |
|
SU142452A1 |
| МНОГОСТУПЕНЧАТЫЙ ТРЕХФАЗНЫЙ ЭКСТРАКТОР | 1996 |
|
RU2177356C2 |

