Изобретение относится к подъемно-транспортным машинам для проведения погрузочно-разгрузочных и прочих работ, выполняемых мобильными подъемно-транспортными агрегатами с ограниченной грузоподъемностью.
Известен кран-манипулятор, содержащий смонтированное на транспортном средстве поворотное в вертикальной плоскости основание в виде плоской треугольной фермы и три гидроцилиндра, корпуса которых шарнирно закреплены на вершинах основания, а штоки всех трех гидроцилиндров соединены между собой и с грузозахватным органом, при этом для поворота основания предусмотрено два гидроцилиндра, штоки которых закреплены на обращенной вверх стороне основания, при этом вершина основания, противолежащая упомянутой стороне основания, снабжена горизонтальной балкой, параллельной этой стороне основания, гидроцилиндры поворота основания расположены параллельно друг другу, их штоки закреплены на вершинах основания, соединенных между собой верхней его стороной, при этом между горизонтальной балкой и наклонными сторонами основания расположены укосины, при этом упомянутая горизонтальная балка соединена с фермой, установленной на вертикальных стойках, охватывающих кабину и закрепленных на раме транспортного средства (RU Патент РФ №2207317, опубл. 2003).
Известен манипулятор-трипод параллельно-последовательной структуры, установленный на транспортном средстве, содержащий основание, на котором с помощью шарниров смонтированы три гидроцилиндра, штоки которых соединены между собой и с грузозахватным органом, с целью расширения зоны действия крана и повышения жесткости конструкции, он снабжен дополнительным цилиндром, размещенным на основании, выполненным в виде плоской треугольной фермы, одна сторона которой закреплена на транспортом средстве с возможностью поворота в вертикальной плоскости, при этом в точке соединения трех цилиндров с помощью пятиподвижного шарнира закреплен трехстепенной управляемый захват, представляющий собой три последовательно соединенный между собой механизма, конструкции которых соединены с помощью вращательных цилиндрических шарниров с кинематической парой пятого класса, и для их поворота предусмотрены шаговые двигатели, закрепленные на конструкции механизмов (RU Патент №2616493, опубл. 2017).
Известен кран-манипулятор, содержащий основание, на котором с помощью шарниров смонтированы три гидроцилиндра, штоки которых соединены между собой и с грузозахватным органом с помощью пятиподвижного шарнира, дополнительный цилиндр, размещенный на основании, выполненным в виде плоской треугольной фермы с помощью поворота в вертикальной плоскости, который дополнительно содержит четырехгранную ферму, две передние и задние стойки, два параллельных синхронных гидроцилиндра, при этом четырехгранная ферма соединена с дополнительным цилиндром и основанием верхней стороной посредством силовых узлов, а нижней стороной с передними и задними стойками с помощью цилиндрических шарниров вращения, верхние концы двух параллельных синхронных гидроцилиндра соединены с двумя задними стойками посредством цилиндрических шарниров вращения, а нижние концы выполнены с возможностью их крепления на транспортное средство (RU Патент на полезную модель №183553 U1, опубл. 2018).
Недостатками известных технических решений является недостаточная жесткость и относительно малая зона обслуживания крана-манипулятора.
Техническая проблема - недостаточная жесткость и малая зона обслуживания крана-манипулятора.
Технический результат - увеличение жесткости и зоны обслуживания крана-манипулятора.
Технический результат достигается краном-манипулятором, содержащий основание, выполненное в виде треугольной фермы, состоящей из двух силовых гидроцилиндров и жесткой траверсы, на которой шарнирно смонтированы с возможностью поворота стержни составляющие конструкцию стрелы с грузонесущим органом, при этом стержни составляющие конструкцию стрелы одними концами сходятся в месте крепления грузонесущего органа, а другими концами два стержня стрелы крепятся опорно-поворотными устройствами к жесткой траверсе основания и один стержень стрелы монтируется на передней верхней направляющей передней стойки четырехгранной фермы, все стержни конструкции стрелы закреплены без возможности регулирования по длине, при этом установленные два силовых гидроцилиндра расположены под углом γ друг к другу, который зависит от размеров конструкции, при этом два силовых гидроцилиндра штоками сходятся в общем сферическом шарнире, который своими цапфами монтируется на передней верхней направляющей передней стойки четырехгранной фермы, при этом основание двух силовых гидроцилиндров крепится посредством опорно-поворотных устройств к жесткой траверсе основания, поворот стрелы с грузонесущим органом на определенный угол регулируется работой силовых гидроцилиндров и дополнительных параллельных друг другу силовых гидроцилиндров, при этом для большего поворота стрелы дополнительные параллельные силовые гидроцилиндры работают поочередно друг относительно друга, при этом подъем и опускание стрелы с грузонесущим органом регулируется синхронной работой дополнительных параллельных силовых гидроцилиндров, штоки которых с помощью цилиндрических шарниров крепятся к жесткой траверсе основания, а концами параллельные силовые гидроцилиндры монтируются на задней верхней направляющей задней стойки четырехгранной фермы, задние стойки четырехгранной фермы опираются жестко на парные стойки-укосины, выполненные с возможностью крепления на транспортном средстве.
Изобретение поясняется чертежами.
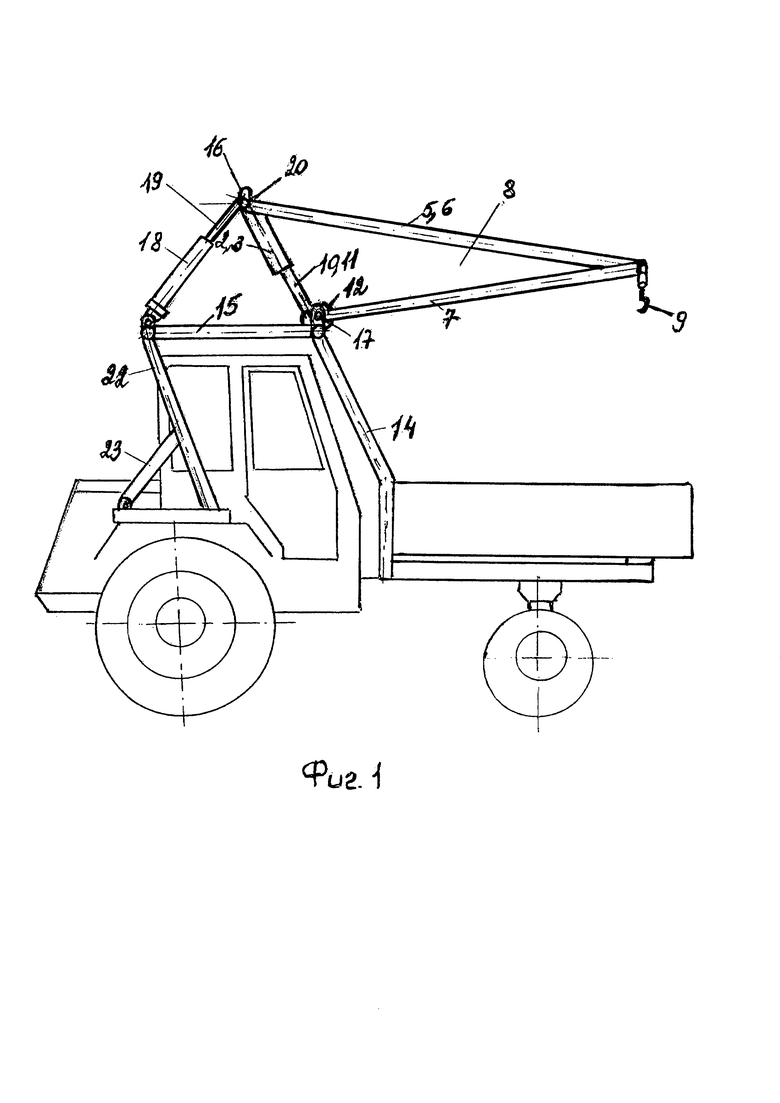
На фигуре 1 схематично представлен кран-манипулятор с возможностью установки его на транспортное средство, общий вид.
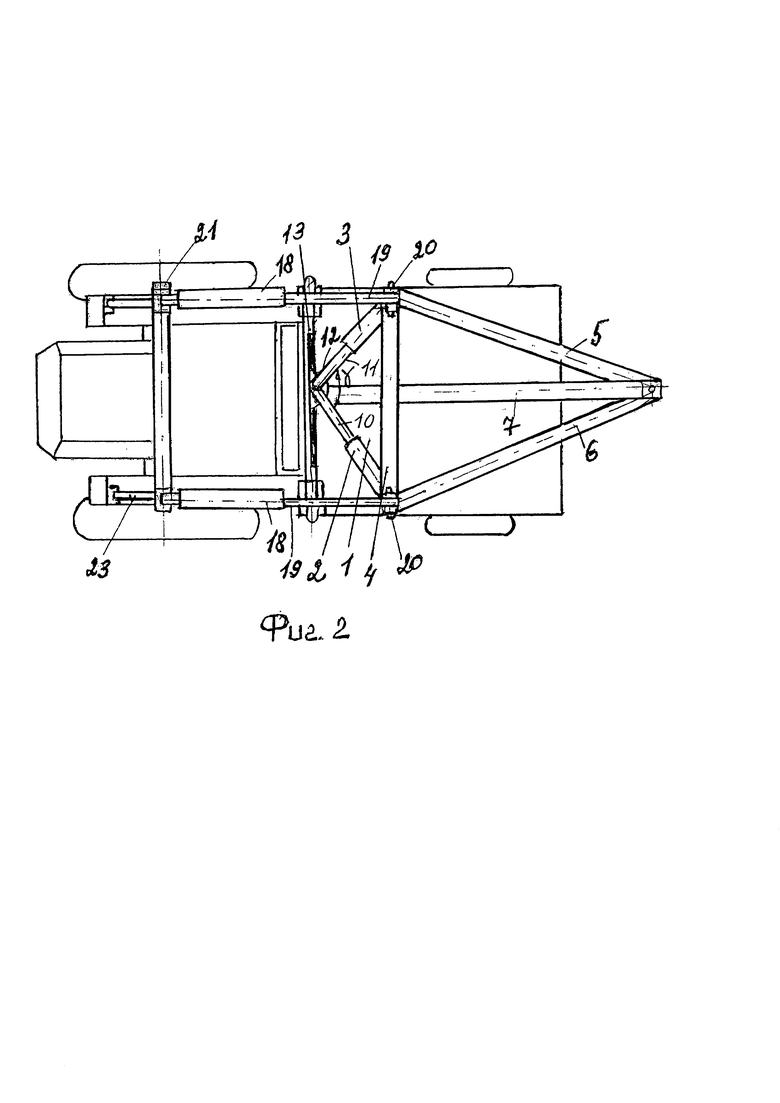
На фигуре 2 изображен вид сверху.
Сведения, подтверждающие возможность реализации заявленного изобретения заключаются в следующем.
Кран-манипулятор содержит основание 1, выполненное в виде треугольной фермы, состоящей из двух силовых гидроцилиндров 2, 3 и жесткой траверсы 4, на которой шарнирно смонтированы с возможностью поворота стержни 5, 6 составляющие конструкцию стрелы 8 с грузонесущим органом 9. Стержни 5, 6, 7, составляющие конструкцию стрелы, одними концами сходятся в месте крепления грузонесущего органа 9, а другими концами два стержня 5, 6 стрелы 8 крепятся посредством опорно-поворотных устройств 17 к жесткой траверсе 4 основания 1 и один стержень 7 стрелы 8 монтируется на передней верхней направляющей 13 передней стойки 14 четырехгранной фермы 15. Стержни 5, 6, 7 конструкции стрелы 8 закреплены без возможности регулирования по длине. Установленные два силовых гидроцилиндра 2, 3 расположены под углом γ друг к другу, который зависит от размеров конструкции. Два силовых гидроцилиндра 2, 3 штоками 10, 11 сходятся в общем сферическом шарнире 12, который своими цапфами монтируется на передней верхней направляющей 13 передней стойки 14 четырехгранной фермы 15. Основание двух силовых гидроцилиндров 2, 3 крепится опорно-поворотными устройствами 16 к жесткой траверсе 4 основания 1. Поворот стрелы 8 с грузонесущим органом 9 на определенный угол регулируется работой силовых гидроцилиндров 2, 3 и дополнительных параллельных друг другу силовых гидроцилиндров 18. Для большего поворота стрелы дополнительные параллельные силовые гидроцилиндры 18 работают поочередно друг относительно друга. Подъем и опускание стрелы 8 с грузонесущим органом 9 регулируется синхронной работой дополнительных параллельных силовых гидроцилиндров 18, штоки 19 которых с помощью цилиндрических шарниров 20 крепятся к жесткой траверсе 4 основания 1, а концами параллельные силовые гидроцилиндры 18 монтируются на задней верхней 21 направляющей задней стойки 22 четырехгранной фермы 15. Задние стойки 22 четырехгранной фермы 15 опираются жестко на парные стойки-укосины 23, выполненные с возможностью крепления на транспортном средстве.
Кран-манипулятор работает следующим образом.
Синхронной работой двух параллельных силовых гидроцилиндров 18 сообщается подъем и опускание, и изменение вылета стержневой стрелы 8 с грузонесущим органом 9. Работа стержневой стрелы 8 и ее поворот на определенные углы, обеспечивается одновременной или поочередной работой силовых гидроцилиндров 2, 3. Совместной работой силовых гидроцилиндров 2, 3, 18 регулируется процесс поворота на больший угол, подъема и опускания груза с грузонесущим органом 9 на необходимую величину. Зона действия стрелы 8 и ее грузонесущего органа 9 за счет работы силовых гидроцилиндров 2, 3, 18 увеличивается. В сферическом шарнире 12 происходит взаимное перемещение штоков 10, 11 силовых гидроцилиндров 2, 3 друг относительно друга и относительно плоскости стержневой стрелы 8.
Опорные устройства 16 и 20 на основании 1 обеспечивают жесткую связь стержневой стрелы 8 и силовых гидроцилиндров 2, 3 с основанием 1. Основание 1 выполненное в виде треугольной фермы обеспечивает жесткую связь с конструкцией стержневой стрелы 8. Задние стойки 22 четырехгранной фермы 15, которые опираются жестко на парные стойки-укосины 23, выполнены с возможностью крепления на транспортном средстве. Жесткие соединения стержней стрелы 8 повышают жесткость в работе, а жесткость соединения треугольной фермы основания 1 и четырехгранной фермы 15 обеспечивает жесткость в работе всей конструкции.
В итоге достигается силовая мощность и жесткость конструкции и увеличивается зона обслуживания крана-манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран-манипулятор | 2021 |
|
RU2760370C1 |
| Кран-манипулятор | 2022 |
|
RU2776888C1 |
| Кран-манипулятор | 2024 |
|
RU2823660C1 |
| Кран-манипулятор | 2019 |
|
RU2722762C1 |
| Стрела грузоподъемного средства | 2021 |
|
RU2760371C1 |
| Стрела грузоподъемного средства | 2022 |
|
RU2784541C1 |
| КРАН-МАНИПУЛЯТОР | 2001 |
|
RU2207317C1 |
| Малогабаритный электропогрузчик со стреловым грузоподъемным устройством | 2021 |
|
RU2768058C1 |
| Робот-манипулятор | 2024 |
|
RU2833264C1 |
| КРАН-МАНИПУЛЯТОР | 1992 |
|
RU2053191C1 |
Изобретение относится к подъемно-транспортным машинам для проведения погрузочно-разгрузочных и прочих работ. Кран-манипулятор содержит основание, выполненное в виде треугольной фермы, состоящей из двух силовых гидроцилиндров и жесткой траверсы, на которой шарнирно смонтированы с возможностью поворота стержни составляющие конструкцию стрелы с грузонесущим органом. Стержни конструкции стрелы закреплены без возможности регулирования по длине. Два силовых гидроцилиндра штоками сходятся в общем сферическом шарнире, который своими цапфами монтируется на передней верхней направляющей передней стойки четырехгранной фермы. Основание двух силовых гидроцилиндров крепится опорно-поворотными устройствами к жесткой траверсе основания. Подъем и опускание стрелы с грузонесущим органом регулируется синхронной работой дополнительных параллельных силовых гидроцилиндров, штоки которых с помощью цилиндрических шарниров крепятся к жесткой траверсе основания, а концами параллельные силовые гидроцилиндры монтируются на задней верхней направляющей задней стойки четырехгранной фермы. Задние стойки четырехгранной фермы опираются жестко на парные стойки-укосины, выполненные с возможностью крепления на транспортном средстве. Достигается силовая мощность и жесткость конструкции и увеличивается зона обслуживания крана-манипулятора. 2 ил.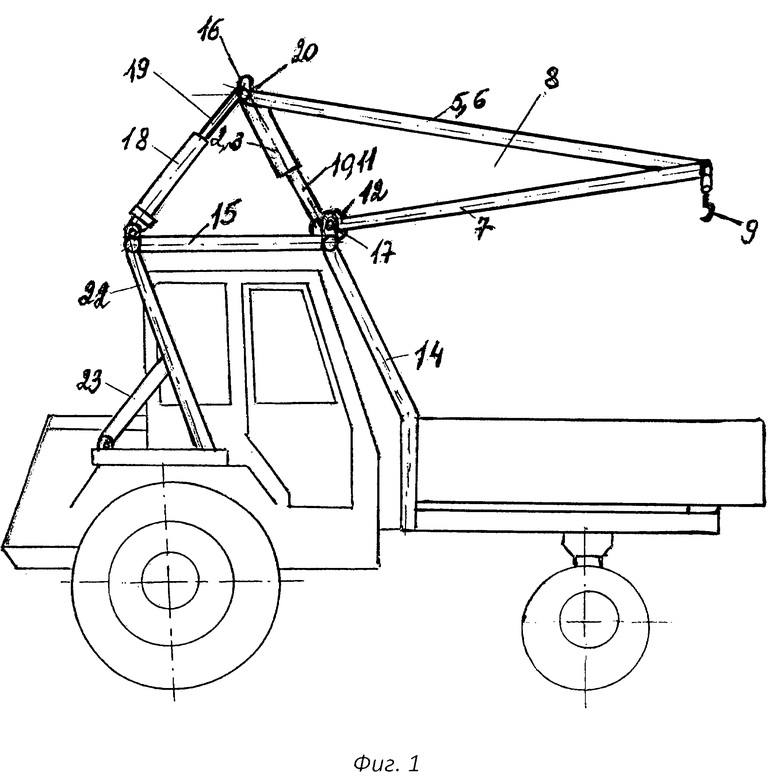
Кран-манипулятор, содержащий основание, отличающийся тем, что основание выполнено в виде треугольной фермы, состоящей из двух силовых гидроцилиндров и жесткой траверсы, на которой шарнирно смонтированы с возможностью поворота стержни, составляющие конструкцию стрелы с грузонесущим органом, при этом стержни составляющие конструкцию стрелы одними концами сходятся в месте крепления грузонесущего органа, а другими концами два стержня стрелы крепятся опорно-поворотными устройствами к жесткой траверсе основания и один стержень стрелы монтируется на передней верхней направляющей передней стойки четырехгранной фермы, все стержни конструкции стрелы закреплены без возможности регулирования по длине, при этом установленные два силовых гидроцилиндра расположены под углом γ друг к другу, который зависит от размеров конструкции, при этом два силовых гидроцилиндра штоками сходятся в общем сферическом шарнире, который своими цапфами монтируется на передней верхней направляющей передней стойки четырехгранной фермы, при этом основание двух силовых гидроцилиндров крепится посредством опорно-поворотных устройств к жесткой траверсе основания, поворот стрелы с грузонесущим органом на определенный угол регулируется работой силовых гидроцилиндров и дополнительных параллельных друг другу силовых гидроцилиндров, при этом для большего поворота стрелы дополнительные параллельные силовые гидроцилиндры работают поочередно друг относительно друга, при этом подъем и опускание стрелы с грузонесущим органом регулируется синхронной работой дополнительных параллельных силовых гидроцилиндров, штоки которых с помощью цилиндрических шарниров крепятся к жесткой траверсе основания, а концами параллельные силовые гидроцилиндры монтируются на задней верхней направляющей задней стойки четырехгранной фермы, задние стойки четырехгранной фермы опираются жестко на парные стойки-укосины, выполненные с возможностью крепления на транспортном средстве.
| Клапан для системы наддува и вентиляции герметической кабины летательного аппарата | 1964 |
|
SU183553A1 |
| КРАН-МАНИПУЛЯТОР | 2001 |
|
RU2207317C1 |
| JP H07100311 B2, 01.11.1995 | |||
| КРАН-МАНИПУЛЯТОР | 1992 |
|
RU2053191C1 |

