Изобретение относится к технике проведения погрузочно-разгрузочных, технологических, подсобных и т. п. работ, выполняемых мобильными подъемно-транспортными агрегатами ограниченной грузоподъемности.
Известен грузоподъемный кран, содержащий смонтированное на транспортном средстве поворотное в вертикальной плоскости основание в виде плоской треугольной фермы, на котором с помощью шарниров закреплены три гидроцилиндра, штоки которых соединены между собой и с грузозахватным органом, для поворота основания предусмотрен дополнительный гидроцилиндр (SU 594021, МПК2 В 66 С 23/44, 1978).
Технический недостаток известного грузоподъемного крана: недостаточные функциональные возможности из-за ограниченной погрузочной высоты и необходимости демонтажа (и неиспользования) собственного кузова транспортного средства; нерациональная загрузка гидроцилиндров - верхний цилиндр, закрепленный на основании, и цилиндр поворота основания, воспринимающие неблагоприятные растягивающие усилия, являются наиболее нагруженными.
Известен также кран-манипулятор, содержащий смонтированное на транспортном средстве поворотное в вертикальной плоскости основание в виде плоской треугольной фермы и три гидроцилиндра, корпуса которых шарнирно закреплены на вершинах основания, а штоки всех трех гидроцилиндров соединены между собой и с грузозахватным органом, при этом для поворота основания предусмотрено два гидроцилиндра, штоки которых закреплены на обращенной вверх стороне основания (RU 2053191 С1, МПК6 В 66 С 23/44, 1996). В этом манипуляторе исключается, по крайней мере, один недостаток - достигается более равномерная загрузка всех гидроцилиндров, поскольку закрепленные на основании цилиндры перекомпонованы, и растягивающие усилия воспринимают два цилиндра, а для поворота основания предусмотрено два цилиндра.
Технический недостаток данного крана-манипулятора: наличие зоны неустойчивой работы, которая наступает, когда вертикальная ось шарнира основания и центр шарнира крепления цилиндров поворота на основании располагаются примерно на одной вертикальной геометрической оси; недостаточные эксплуатационно-технологические показатели из-за ограниченной погрузочной высоты и вынужденного демонтажа (и неиспользования) собственного кузова транспортного средства; усложнен алгоритм управления пятью цилиндрами. Эти недостатки сводят на нет достоинство манипулятора - расширение зоны действия в горизонтальной плоскости.
Техническая задача: повышение устойчивости в работе и эксплуатационно-технологических показателей за счет преобразования конструкции в жесткую кинематическую структуру, увеличение погрузочной высоты и функциональных возможностей, в том числе обеспечения загрузки (разгрузки) собственного кузова, упрощения алгоритма управления гидроцилиндрами.
Согласно изобретению вершина основания, противолежащая упомянутой стороне основания, снабжена горизонтальной балкой, параллельной этой стороне основания, гидроцилиндры поворота основания расположены параллельно друг другу, их штоки закреплены на вершинах, соединенных между собой верхней его стороной, при этом между горизонтальной балкой и наклонными сторонами основания расположены укосины. Упомянутая горизонтальная балка соединена с фермой, установленной на вертикальных стойках, охватывающих кабину и закрепленных на раме транспортного средства.
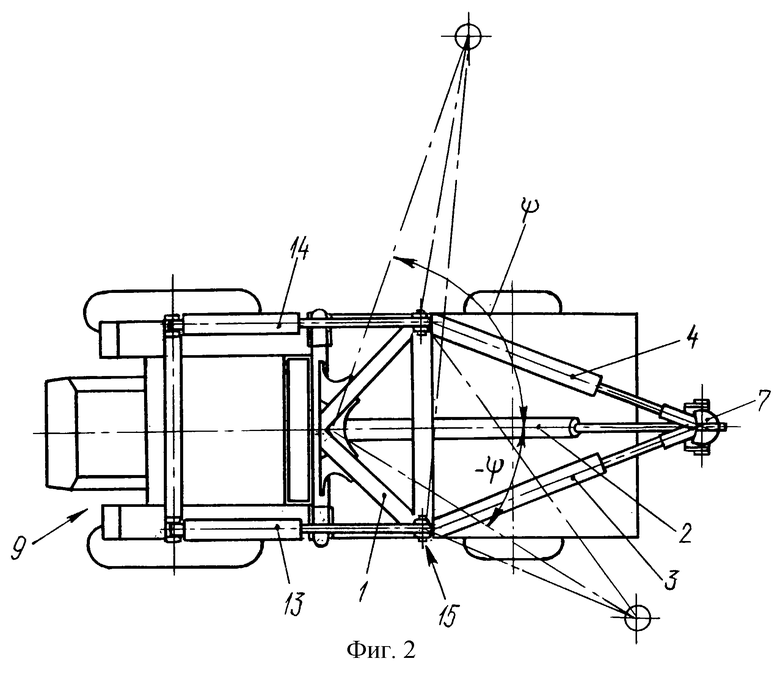
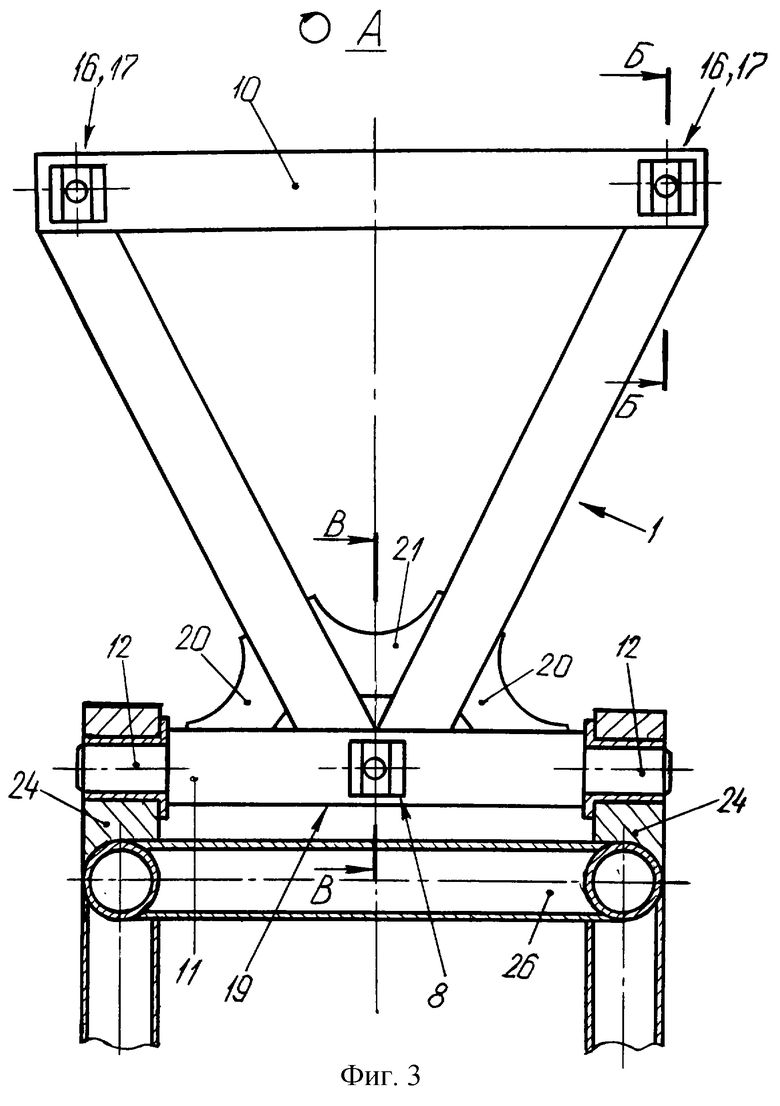
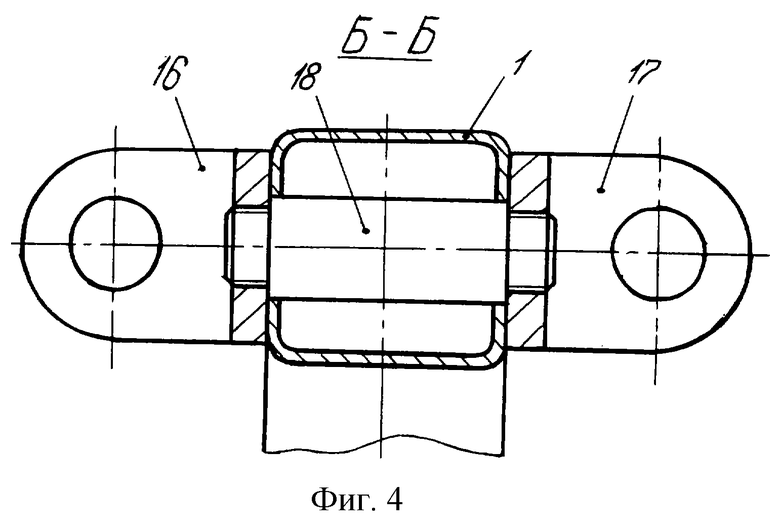
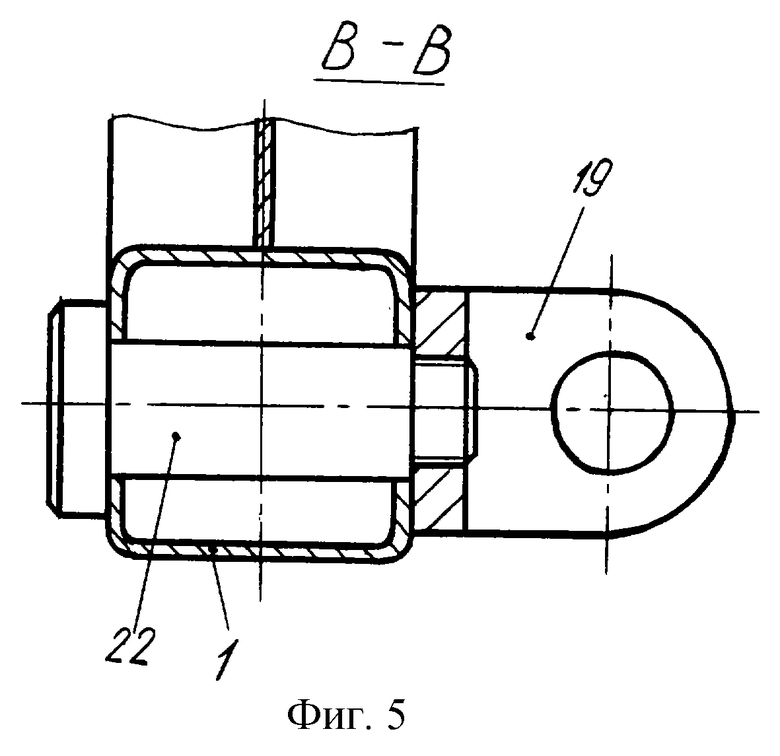
На фиг.1 изображен общий вид крана-манипулятора на транспортном средстве, вид сбоку; на фиг.2 - то же, вид в плане; на фиг.3 - вид А на фиг.1; на фиг.4 и 5 - сечения Б-Б и В-В на фиг.3 соответственно.
Кран-манипулятор содержит смонтированное на транспортном средстве в вертикальной плоскости основание 1 в виде плоской треугольной фермы, выполненной, например, из стальных квадратных труб. На вершинах основания шарнирно закреплены корпуса трех гидроцилиндров 2, 3 и 4; шарниры 5 крепления корпусов цилиндров на основании имеют две степени свободы. Штоки всех трех цилиндров соединены между собой и с грузозахватным органом 6 посредством особого шарнирного устройства 7 с четырьмя степенями свободы. Оси симметрии цилиндров 2-4 пересекаются между собой в одной точке - в центре устройства 7, образуя подвижную пространственную трехстержневую структуру в виде треугольной пирамиды. Гидроцилиндр 2 расположен внизу и закреплен на вершине 8 основания 1, примыкающей к транспортному средству 9. Гидроцилиндры 3 и 4 расположены вверху и закреплены на вершинах, соединенных между собой верхней стороной 10 основания. Вершина 8 основания, противолежащая упомянутой стороне 10 основания, снабжена горизонтальной балкой 11, параллельной этой стороне основания. На концах горизонтальной балки имеются цапфы 12 для монтажа основания на транспортном средстве. Для поворота основания 1 предусмотрено два дополнительных гидроцилиндра 13 и 14, которые расположены параллельно друг другу.
Штоки этих цилиндров посредством цилиндрических шарниров 15 закреплены на обращенной вверх стороне 10 основания - на вершинах, соединенных между собой его указанной стороной. Посадочные гнезда 16 и 17 соответственно цилиндров 13, 14 поворота и двух из трех - верхних цилиндров 3, 4 манипулятора - оппозитно расположены на противоположных плоскостях основания 1 и с помощью дополнительной резьбовой связи 18 и сварки жестко соединены между собой. Посадочное гнездо 19 третьего - нижнего цилиндра 2 манипулятора - дополнительно усилено укосинами 20 и 21 между наклонными сторонами основания и горизонтальной балкой 11 и посредством связи 22 и сварки жестко связано с противоположной плоскостью основания 1. Транспортное средство 9 снабжено расположенными на возвышающейся части, например на кабине 23, двумя парами силовых узлов 24 и 25, шарнирно соединенными соответственно с цапфами 12 горизонтальной балки 11 и с корпусами гидроцилиндров 13 и 14 поворота. Указанные опоры являются вершинами четырехгранной фермы 26, установленной на вертикальных стойках 27, охватывающих кабину 23 и закрепленных противоположными концами на раме 28 транспортного средства 9, т.е. упомянутая горизонтальная балка 11 соединена с фермой 26. При такой компоновке крана-манипулятора на транспортном средстве сохраняется собственный кузов 29, при этом увеличивается погрузочная высота - высота подъема шарнирного устройства 7 и грузозахватного органа 6. Гидроцилиндры 2-4 манипулятора имеют независимое управление от насосно-управляющей установки (на чертежах не показана), задействованной от транспортного средства 9. Гидроцилиндры 13 и 14 поворота управляются в обычном порядке как одно кинематическое звено от той же установки.
Кран-манипулятор работает следующим образом.
При изменении длины - перемещении штока с поршнем хотя бы одного гидроцилиндра 2, 3 или 4 - изменяется геометрическая форма "пирамиды" - пространственной структуры, образованной этими цилиндрами и основанием 1. Вследствие этого вершина "пирамиды" - ее особое шарнирное устройство 7 - начинает перемещаться, увлекая за собой грузозахватный орган 6. Манипулируя работой одного, двух или всех трех цилиндров 2-4, грузозахватный орган 6 выводится по кратчайшей траектории в заданное положение в пространстве (в пределах кинематических возможностей пространственной структуры). Характерные положения шарнирного устройства 7 показаны на фиг.1 и 2.
Пространственная структура обладает достаточно широкими кинематическими возможностями. Нижний гидроцилиндр 2, который условно можно трактовать как грузовую стрелу переменного вылета, может разворачиваться в горизонтальной плоскости на углы ψ свыше ±90o, а в вертикальной плоскости углы ϕ составляют примерно ±40o (при наклонном положении основания 1, как показано на фиг.1). Дополнительный разворот в вертикальной плоскости всему оборудованию, размещенному на поворотном основании 1, сообщают гидроцилиндры 13 и 14 поворота. При этом возрастают возможности подъема и опускания грузозахватного органа 6 не только в плоскости симметрии манипулятора, но и после разворота гидроцилиндра 2 ("стрелы") влево или вправо на определенные углы. Благодаря этому кран-манипулятор в частности способен: осуществить загрузку (разгрузку) собственного кузова 29; выполнить погрузочные и технологические операции сбоку транспортного средства 9 - слева или справа; произвести загрузку (разгрузку) рядом стоящего малотоннажного грузового автомобиля или прицепа; реализовать перегрузку от указанных средств в собственный кузов и наоборот. Кран-манипулятор не имеет выносных опор и после известного блокирования переднего моста (с малыми колесами) способен перевозить груз на крюке грузозахватного органа 6, производить транспортно-перегрузочные, технологические, подсобные и т.п. работы.
Наличие в составе поворотного основания 1 горизонтальной балки 11 с монтажными цапфами 12 на концах способствует устойчивой работе манипулятора во всем диапазоне углов поворота основания, включая углы свыше 90o (показано на фиг. 1). В предложенном манипуляторе крепление основания к транспортному средству 9 по существу производится не вершиной 9, а разнесенными цилиндрическими опорами, в состав которых входят силовые узлы 24 фермы 26 и цапфы 12 балки 11. Устойчивой работе манипулятора способствуют и шарниры 5 крепления корпусов цилиндров 2-4 к основанию, которые обеспечивают необходимые подвижности гидроцилиндрам при любом положении основания и любом положении цилиндров относительно основания. Параллельно расположенные цилиндры 13 и 14 поворота с обычными цилиндрическими шарнирами 15 не чувствительны к положению основания. В основании 1 осуществляется рациональный силовой поток: растягивающие усилия со стороны верхних цилиндров 3 и 4 манипулятора непосредственно, минуя промежуточные звенья, с помощью жестко соединенных между собою, оппозитно расположенных посадочных гнезд 16 и 17, в том числе за счет связи 18, передаются на цилиндры 13 и 14 поворота; лишь боковые составляющие усилий воспринимаются верхней 10 и боковыми сторонами основания. Сжимающее усилие со стороны нижнего цилиндра 2 манипулятора замыкается в усиленном узле, в котором сходятся наклонные стороны основания и горизонтальная балка 11 с укосинами 20 и 21, при этом посредством связи 22 и посадочного гнезда 19 задействуется и противоположная плоскость основания. Реакции в цапфах 12 горизонтальной балки 11 основания и усилия от гидроцилиндров 13 и 14 также рациональным силовым потоком передаются на раму 28 транспортного средства 9, при этом кабина 23 не нагружается. Это происходит за счет передачи нагрузок на силовые узлы 24 и 25, которые принадлежат не только четырехгранной ферме 26, но и вертикальным стойкам 27, охватывающим кабину 23 и замкнутым на раму 28, т.е. опоры расположены на вершинах трех взаимно перпендикулярных трубчатых стержней.
Названные перемещения в пространстве грузозахватного органа 6 и расширенные возможности крана-манипулятора достигаются при упрощении алгоритма управления гидроцилиндрами - исключается пространственное образование с цилиндрами поворота основания; управление одновременно двумя цилиндрами 13 и 14 - традиционное при неработающих цилиндрах "пирамиды". В походном (транспортном) положении манипулятор сокращает свои габариты за счет втягивания штоков гидроцилиндров и предельного разворота - "запрокидывания" основания 1 с оборудованием на кабину 23 транспортного средства 9. Расположенный над кабиной кран-манипулятор не ограничивает функциональные возможности транспортного средства, в качестве которого может применяться тракторное самоходное шасси типа Т-16М. Манипулятор и его подвижная пространственная структура характеризуются небольшими габаритами и массой. Известно, что трехстержневые пространственные узлы при незначительной собственной массе обладают повышенной жесткостью и устойчивостью в работе, несмотря на то, что их звенья имеют шарнирное крепление. Этому способствует и то, что оси симметрии цилиндров 2-4 образуют геометрически корректную "пирамиду", поскольку пересекаются в одной точке - в центре устройства 7. Отмеченные особенности, в сочетании с устойчивостью в работе всей конструкции, рациональными силовыми потоками, увеличением погрузочной высоты и функциональных возможностей, превращают самоходное шасси с краном-манипулятором в высокоманевренный, малогабаритный и эффективный погрузочно-транспортный и технологический агрегат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТРЕЛА ГРУЗОПОДЪЕМНОГО СРЕДСТВА | 2000 |
|
RU2178382C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158207C1 |
| Манипулятор-трипод параллельно-последовательной структуры | 2016 |
|
RU2616493C1 |
| СТРЕЛА ГРУЗОПОДЪЕМНОГО СРЕДСТВА | 2003 |
|
RU2231494C1 |
| Кран-манипулятор | 2019 |
|
RU2725367C1 |
| Кран-манипулятор | 2019 |
|
RU2722762C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ ПОГРУЗОЧНО-ТРАНСПОРТНЫЙ АГРЕГАТ | 1999 |
|
RU2150813C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ МАНИПУЛЯТОРОМ | 2003 |
|
RU2240226C1 |
| Манипулятор-трипод промышленного назначения | 2017 |
|
RU2651781C1 |
| Кран-манипулятор | 2024 |
|
RU2823660C1 |
Изобретение относится к технике проведения погрузочно-разгрузочных, технологических, подсобных и т.п. работ, выполняемых мобильными подъемно-транспортными агрегатами ограниченной грузоподъемности. Кран-манипулятор содержит смонтированное на транспортном средстве поворотное в вертикальной плоскости основание в виде плоской треугольной фермы. На вершинах основания шарнирно закреплены корпуса трех гидроцилиндров. Штоки всех трех цилиндров соединены между собой и с грузозахватным органом. Для поворота основания предусмотрено два гидроцилиндра, штоки которых закреплены на обращенной вверх стороне основания. Вершина основания, противолежащая упомянутой стороне основания, снабжена горизонтальной балкой, параллельной верхней стороне основания. Гидроцилиндры поворота основания расположены параллельно друг другу, их штоки закреплены на вершинах основания, соединенных между собой верхней его стороной. При этом между горизонтальной балкой и наклонными сторонами основания расположены укосины. Технический результат изобретения - повышение устойчивости в работе и эксплуатационно-технологических показателей. 1 з.п. ф-лы, 5 ил.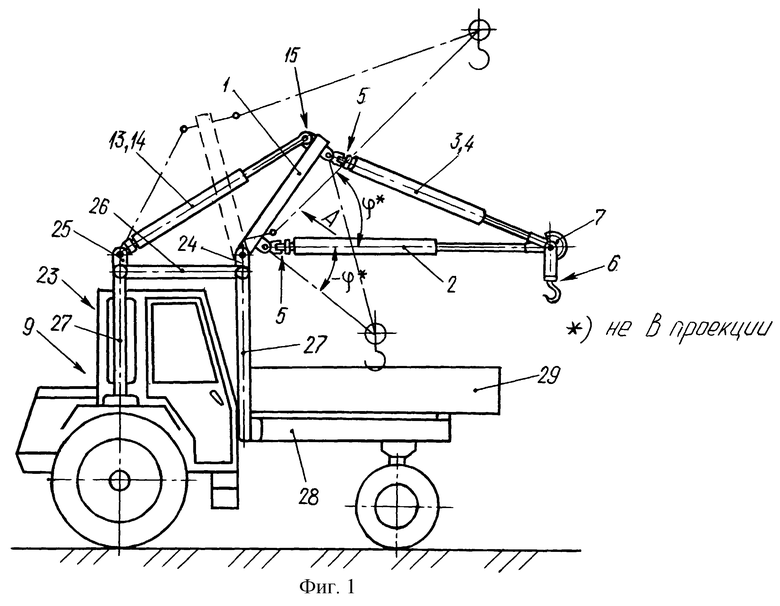
| КРАН-МАНИПУЛЯТОР | 1992 |
|
RU2053191C1 |
| Грузоподъемный кран | 1976 |
|
SU594021A1 |
| КРАН-МАНИПУЛЯТОР | 2000 |
|
RU2167804C1 |
| ГРУЗОПОДЪЕМНЫЙ КРАН | 0 |
|
SU274318A1 |
| Грузоподъемное устройство | 1983 |
|
SU1240728A1 |
| Устройство для подъема и перемещения грузов | 1983 |
|
SU1207847A1 |

