Область технического применения
[0001] Настоящее изобретение в целом относится к технологии ультразвукового неразрушающего контроля (на английском языке обозначается UNDT), предназначенной для оснащения металлорежущих станков. В нем реализована технология, включающая работу с лазерным лучом и ударную обработку лазерного воздействия. Таким образом, изобретение относится к техническому классу B23K и его подклассу 26 по международной патентной классификации.
[0002] Изобретение преимущественно реализует монолитную поворотную оптическую сборку зеркал типа TLAM (обозначается как ABLAT на английском языке) для осуществления маневренного наведения множества исходящих вторичных лазерных лучей, выводимых из одного и того же входящего пучка лазерного излучения, осуществляющего:
a. контроль качества металлических заготовок с помощью фокусировки лазерного луча (B23K 26/02 и 26/03);
b. автоматическую фокусировку лазерных лучей (B23K 26/04);
c. Формирование лазерного луча с использованием нескольких фокусных точек (B23K 26/06);
d. оптические средства для формирования лазерного луча, включая линзы и зеркала (B23K 26/064);
e. разделение лазерного луча на отдельные лучи, имеющие несколько фокусных точек (B23K 26/067);
f. средства для определения конфигурации лазерного пятна (B23K 26/073);
g. относительное перемещение между лазерным лучом и заготовкой (B23K 26/08);
h. сканирующую систему, которая включает в себя относительное перемещение между лазерным лучом и лазерной головкой (B23K 26/082);
i. лазерную обработку ударной волной (B23K 26/356);
j. устройство, формирующее пунктирную линию лазерного воздействия на заготовку (B23K 26/359);
k. вспомогательное оборудование, в частности, Электромагнитные Акустические Преобразователи типа TEMA (обозначаются EMAT на английском языке) (B23K 26/70).
[0003] Изобретение в целом относится к технологии UNDT гибридного типа Электромагнитных Акустических Преобразователей/Лазера, включающей монолитный поворотный оптический блок TLAM (на английском языке обозначается ABLAT), для контроля металлургических объектов, который:
a. состоит из множества жестко связанных зеркал, расположенных по геликоиду с круговым цилиндрическим шагом винта,
b. вращающиеся цилиндрически вокруг общего вращающегося вала и,
c. приводящиеся в действие общим приводным двигателем,
d. для осуществления маневренного наведения многолучевых лазеров.
[0004] Технология изобретения также касается таких гибридных Электромагнитных Акустических Преобразователей/Лазерного устройства типа TLAM (обозначаемого на английском языке ABLAT), реализующего методику, сочетающую в себе обе технологии:
a. излучения ультразвуковых механических колебаний в процессе лазерной обработки ударной волной, использующей множество дальних отклоненных вторичных лазерных лучей, воздействующих на металлическую заготовку, причем это происходит маневренно, скачками, исходящими из одного и того же поступающего лазерного луча, и,
b. приема и контроля сигналов, вызванных ультразвуковыми механическими колебаниями в металлической заготовке, посредством множества Электромагнитных Акустических Преобразователей типа ЭМАП (на английском языке обозначаются как EMAT) или эквивалентных, работающих в режиме приема.
[0005] Основное применение устройства изобретения - контроль качества боковых граней крупных металлургических изделий, в частности верхних и нижних граней стальных слябов, а также непрерывной разливки стальных прядей на сталелитейном заводе.
Предпосылки создания изобретения
[0006] Обнаружение и определение характеристик дефектов в металлургической продукции обычно достигается с помощью систем неразрушающего ультразвукового контроля UNDT.
[0007] Одним из методов UNDT, описанных в предшествующем уровне техники, является метод CCNDU (обозначается CUNDT на английском языке), реализующий, в частности, электромагнитный акустический преобразователь TEMA (обозначается ЭМАП на английском языке), и построенный на механизме магнитной связи. Звуковые волны генерируются внутри материала, а не при контакте с поверхностью материала тестируемых изделий. ЭМАП обладают значительными преимуществами по сравнению с пьезоэлектрическими преобразователями CUNDT. ЭМАП может генерировать в качестве излучателя и/или принимать в качестве приемника различные режимы ультразвуковых волн в проводящих материалах без физического контакта и без использования жидкостной связи с тестируемыми изделиями. Такие бесконтактные и безмуфтовые конструктивные особенности повышают надежность испытаний. Кроме того, физические свойства траектории передачи ультразвуковой волны не зависимы от контакта. Кроме того, требования к допускам, предъявляемые к положению и движению металлургических изделий, испытываемых с помощью ЭМАП, достаточно приемлемые. Это делает преобразователи ЭМАП особенно подходящим решением для промышленных применений, например, для контроля при средних и повышенных температурах и при плохом состоянии поверхности проверяемых металлургических изделий. Из уровня техники известно, что ЭМАП является низкоэффективным излучателем ультразвуковых волн, но эффективным приемником ультразвуковых волн.
[0008] Вариантом методики CUNDT, описанным в предшествующем уровне техники, является гибридная технология ЭМАП/Лазер. Генерация ультразвука производится одним (или более) импульсным лазером (лазерами). А обнаружение ультразвуковых волн осуществляется одним (или более) Электромагнитным Акустическим Преобразователем ЭМАП-приемником, которые объединены в гибридную ультразвуковую технологию ЭМАП/Лазер для контроля несплошностей сварных швов в металлургических изделиях. Полученная гибридная технология ЭМАП/Лазер является технически бесконтактной. Электромагнитный акустический преобразователь размещается в непосредственной близости к поверхности изделия. Электромагнитные Акустические Преобразователи могут быть настроены на работу при повышенных температурах. Гибридные системы Электромагнитных Акустических Преобразователей и Лазера, применяемые в предшествующем уровне техники, обеспечивают наилучшую комбинацию для неразрушающего ультразвукового контроля поверхности металлургических изделий без контакта. Одним из главных преимуществ гибридной технологии ЭМАП/Лазер, помимо бесконтактности, является возможность одновременного обнаружения поверхностных дефектов (с помощью волн Рэлея) и подповерхностных дефектов на глубине (с помощью продольных и поперечных волн). Использование лазерного излучателя вместо ЭМАП-излучателя позволяет генерировать различные типы наклонных ультразвуковых волн на более высокой частоте (10 МГц) и с большей интенсивностью, чем это можно сделать с помощью ЭМАП-излучателя. Кроме того, лазерное воздействие лазерного излучателя может генерировать ультразвуковые волны на большой глубине и значительном расстоянии от поверхности материала. В отличие от этого, эффективность ЭМАП-излучателя значительно снижается с отдаленностью от поверхности материала и с расстоянием от несплошностей сварных швов. Как правило, 2-3 мм - это максимальное расстояние, допустимое для сохранения эффективности излучателя ЭМАП. Первый пример такой гибридной технологии ЭМАП/Лазер описан в документе Эдвардса С. и др. под названием "Интегрированное устройство на оптическом волокне - ЭМАП для применения в ультразвуковом неразрушающем контроле", опубликованном в "Британском журнале о неразрушающем контроле", Нортгемптон, Великобритания, том 32, № 2, страницы 76-78" 1 февраля 1990 года. Второй пример этой гибридной технологии EMAП/Лазер описан в документе Грэхема Г.М. и др. под названием "Автоматизированная система для лазерно-ультразвукового зондирования проплавления", опубликованном в "Мехатроника Pergamon Press, Оксфорд, Великобритания, ч. 7, № 8, стр. 711-721" 1 декабря 1997 года.
[0009] Согласно уровню техники UNDT, ультразвуковые данные топологии несплошностей сварных швов в изделии могут быть обработаны в цифровом виде и представлены в ряде различных форматов. Наиболее распространенные форматы называются A-Скан, B-Скан и C-Скан; или их эквивалентные топологические представления. Каждый режим представления A-Скан, B-Скан и C-Скан предлагает различные способы осмотра и оценки несплошностей на и/или внутри проверяемого материала изделия. Обычно результаты испытаний UNDT сканируются и/или отображаются последовательно в трех форматах отображения.
[0010] Согласно уровню техники UNDT, когда единственный ультразвуковой приемник расположен в точке на поверхности изделия и индуцируется ультразвуковым излучателем, самое основное представление данных о форме ультразвуковых волн, принятых, увиденных и предоставленных единственным ультразвуковым приемником, имеет форму А-Скан, демонстрирующего форму полученных волн. При А-Скан амплитуда эхо-сигналов и время прохождения ультразвукового сигнала от разрывов, улавливаемых ЭМАП, наносятся на простую диаграмму. По вертикальной оси откладывается амплитуда сигнала, а по горизонтальной - время прохождения. Звуковая энергия от ультразвукового излучателя индуцируется и распространяется через материал с помощью ультразвуковых волн. Когда в теле изделия есть несплошность, часть энергии волнового пути отражается от такой несплошности в сторону ультразвукового приемника. На экране A-Скан отображается количество полученной ультразвуковой энергии в зависимости от времени прохождения. Относительное количество полученной энергии откладывается по вертикальной оси. По горизонтальной оси отображается время прохождения, которое связано с расстоянием, пройденным через материал. В системе A-Скан относительный размер несплошностей можно оценить, сравнив амплитуду сигнала, полученную от отражателя с неизвестной несплошностью, с амплитудой сигнала, полученной от отражателя с известной несплошностью.
[0011] Согласно уровню техники UNDT, при осуществлении линейного сканирования объекта вдоль линии обнаружения на поверхности объекта, принадлежащей плоскости сканирования, пересекающей его по вертикали, B-Скан показывает оцифрованное секционное изображение объекта в соответствии с плоскостью сканирования, пересекающей линию обнаружения. B-Скан объединяет данные нескольких A-Скан, предоставленные (a) либо одним ультразвуковым приемником, перемещаемым поэтапно по линейной матрице приемников, состоящей из последовательных точек приема вдоль линии обнаружения; либо (b) множеством ультразвуковых приемников, расположенных фиксированным образом в удаленных точках приема линейной матрицы приема, расположенной вдоль линии обнаружения; либо (c) одним фиксированным ультразвуковым приемником, индуцированным множеством ультразвуковых излучателей, расположенных фиксированным образом в удаленных точках излучения, расположенных вдоль импульсной линии линейной матрицы излучения.
[0012] При В-Скан глубина отражателя несплошности отображается вдоль вертикальной оси. По данным В-Скан можно определить глубину отражателей несплошностей и их приблизительные линейные размеры в направлении линии сканирования.
[0013] С-Скан - это тип отображения, который возможен при выполнении множества двумерных В-Скан вдоль последовательных и отдельных параллельных линий обнаружения (сканирования), расположенных перпендикулярно оси изделия. С-Скан - это вид в плане трехмерного расположения и размера несплошностей. С-Скан представляет собой вид сверху изделия, параллельный схеме сканирования нескольких линий обнаружения. С-Скан обеспечивает трехмерное представление характеристик несплошностей продукта, которые отражают и рассеивают звуковые волны на поверхности и внутри изделия.
[0014] Согласно уровню техники UNDT, известна реализация матрицы ультразвуковых лазерных импульсов (LEA) на изделии, выдаваемых несколькими лазерными лучами. Известна также реализация матрицы ультразвуковых приемников ЭМАП (ERA), размещенных на изделии.
[0015] Из уровня техники UNDT также известно объединение ультразвуковых лазерных излучателей и приемников ЭМАП в гибридном ультразвуковом устройстве UNDT, содержащем двойные матрицы ЭМАП/Импульс-Лазер, включающие матрицу ультразвуковых лазерных импульсов (LEA) и матрицу ультразвуковых приемников ЭМАП (ERA).
[0016] Из уровня техники известно использование дифракционного расщепителя луча (LBS) для параллельного разделения поступающего импульсного лазерного луча и его мощности на набор из n вторичных исходящих импульсных лазерных лучей, параллельно направленных на n удаленные точки импульса, входящие в матрицу (LEA) ультразвуковых лазерных импульсов, с использованием техники, называемой "Разделения лучей". Благодаря параллельному разделению, энергия каждого импульсного исходящего лазерного луча делится на большее число, чем n.
[0017] Пример такой техники "Разделения Лучей" описан в патенте США 7,629,555 B2 на имя Гросса и др. Эта техника не предназначается для промышленного применения для контроля крупных металлургических деталей, где необходимо применение матрицы лазерных импульсов (LEA) из исходящих лазерных лучей высокой интенсивности.
[0018] Из уровня техники также известно использование сканера непрерывного луча (LSS) для непрерывного перемещения поступающего импульсного лазерного луча в непрерывный срез исходящих импульсных лазерных лучей, сфокусированных в непрерывном движении, но не в последовательном точечном направлении, вдоль линии фокусировки, проходящей через, возможно, n точек импульсов матрицы ультразвуковых лазерных импульсов (LEA). Эта так называемая "Методика Управления Лучом" в целом относится к любому непрерывно изменяемому оптическому элементу, включая, например, подвижные линзы, призмы, линзы с переменным фокусным расстоянием, деформируемые зеркала, колеблющиеся зеркала, пространственные фазовые модуляторы и т.д. Наиболее распространенным способом непрерывного перенаправления импульсного поступающего лазерного луча является его отражение от зеркал или дифракция на голографических решетках, установленных на механических сканерах, таких как вращающиеся призмы, сканеры с колеблющимися зеркалами. Классическая методика "Управления Лучом" не подходит для эффективного промышленного применения UNDT. Потому что положение и, следовательно, энергия исходящих импульсных лазерных лучей рассеивается в непрерывном движении к материалу; и расфокусируется и не концентрируется в удаленных дискретных точках импульса.
[0019] Пример такой методики "Управления Лучом" описан в патенте США 4,838,631 на имя Шанде (Chande) и др. В описанном устройстве используется гальванометрическое зеркало для непрерывного перенаправления поступающего лазерного луча на несколько оптических волокон. Факт использования гальванометрического зеркала, которое по своей природе не жестко закреплено, а колеблется, делает устройство очень хрупким к вибрациям. Эта технология не может эффективно использоваться в очень жестких условиях с высокой вибрацией, например, в металлургической промышленности. Кроме того, технологии "Управления Лучом", в частности, использующие гальванометрическое зеркало, могут создавать лишь небольшие угловые изменения поступающего лазерного луча. В результате устройства этой методики требуют большой площади в направлении, перпендикулярном плоскости воздействия.
[0020] Матричные маневренные лазерные излучатели TLAM (обозначаются на английском языке как ABLAT) известны из уровня техники. Маневренная фокусировка ABLAT поступающего лазерного луча заключается в его прерывистой дифракции последовательно и скачкообразно во множество последовательных исходящих лазерных лучей, расположенных на угловом расстоянии, в направлении n точек рассеивания импульсов, удаленных от матрицы ультразвуковых лазерных импульсов (LEA); в отличие от направления их в сторону непрерывной сканирующей линии. ABLAT обычно используются в соответствии с уровнем техники в очень высокотехнологичных областях, в лазерной связи, захвате, обнаружении и отслеживании целей, лазерной микроскопии и интерферометрии. Основными областями применения являются лазерные радары, которые требуют способности быстро наводиться на большое количество широко разнесенных объектов; отслеживание и дискриминация целей; датчики для наблюдения, а также в целях отслеживание космических объектов. В настоящее время они не используются или известны из уровня техники для контроля качества UNDT в металлургической промышленности.
[0021] Уровень техники, концептуально наиболее близкий к изобретению, описан в патенте США 5,948,291 на имя Neylan (Нейлан) и др. Представленное устройство содержит поступающий лазерный луч и множество n вращающихся отражающих дисков, независимых друг от друга, каждый из которых имеет на своей периферии либо полностью отражающую фракцию (зеркало), либо полностью пропускающую и, следовательно, неотражающую фракцию, либо частично пропускающую фракцию (полупрозрачное зеркало).
[0022] n независимые отражающие диски устройства закреплены на n различных несвязанных осях вращения. Поступающий лазерный луч выстраивается по центру и периферии отдельных вращающихся отражающих дисков. Устройство также включает в себя устройство для селективного управления n различными двигателями, чтобы иметь возможность производить, путем дифференциального вращения n несвязанных отражающих дисков, различные варианты амплитуды энергии отклоненных исходящих лазерных лучей, падающих на пунктирную линию фиксированных точек воздействия. Устройство включает в себя линзы для фокусировки исходящих лазерных лучей. Но следует отметить, что описываемое устройство, при наличии n отражающих дисков, состоящих из n долей вращающихся зеркал, обязательно включает в себя n различные оси вращения этих n независимых вращающихся отражающих дисков; и n независимые средства для вращения этих n осей вращения, то есть либо n различных двигателей, либо n механических поворотных соединительных устройств зубчатого типа или эквивалентных им.
[0023] Описанное устройство предшествующего уровня техники не относится к гибридным Оптико-Электромагнитно-Акустическим Преобразователям UNDT типа ЭМАП/Лазер. Оно не включает в себя сенсорный блок, состоящий из Электромагнитных Акустических Преобразователей типа ЭМАП или эквивалентных. Он не предназначен для контроля качества металлургических деталей. И не описывает технические средства получения такого технического результата методом ABLAT.
[0024] Описанное устройство предшествующего уровня техники в определенных конфигурациях может работать в маневренном режиме, как TLAM (обозначается ABLAT на английском языке). Но в такой конфигурации типа ABLAT:
a. его вращающийся оптический блок, включающий n зеркала, образованных из полностью или частично отражающих фракций его n несвязанных независимых отражающих дисков, конструктивно не является монолитным. Он состоит из независимых оптических/механических частей, из которых не все жестко механически связаны и не находятся в фиксированном положении относительно друг друга. В частности, n отражающие диски и их n вращающиеся оси вращаются друг относительно друга и, следовательно, не зафиксированы друг относительно друга. Поэтому вращающийся оптический блок имеет деформированную геометрию во время вращения. Вращающийся оптический блок, состоящий из n независимых вращающихся отражающих дисков, не закреплен жестко на одном и том же вращающемся валу;
b. n зеркала и n связанные с ними точки отражения не находятся в фиксированном положении относительно одной и той же оси вращения. И они не приводятся в синхронное вращение одним и тем же приводным двигателем;
c. n вращающиеся отражающие диски непосредственно находятся во вращающемся положении, отклоненном относительно общей оси вращения. Поэтому во время вращения вращающегося оптического блока расстояния между n точками отражения n зеркал, расположенных перпендикулярно и относительно главной оси вращения, постоянно изменяются;
d. каждая из n точек отражения n зеркал проходит круг вращения с центром на главной оси вращения. Эта окружность вращения не перпендикулярна, а постоянно наклонена примерно на 45° по отношению к главной оси вращения;
e. проекция этой окружности вращения на плоскость проекций, параллельную главной оси вращения и проходящую через ее центр вращения, образует эллипс, а не отрезок;
f. проекция этой окружности вращения, параллельная плоскости вращения, перпендикулярной главной оси вращения и проходящей через ее центр вращения, также имеет форму эллипса, а не круга;
g. виртуальный цилиндр отражения, охватывающий n точек отражения n наклонных отражающих дисков, связанных с ним, искажается и не имеет постоянного радиуса при вращении;
h. во время вращательного движения n точки отражения n независимых зеркал этих n отражающих дисков не зафиксированы в продольном направлении, а находятся в возвратно-поступательном продольном движении относительно главной оси вращения и оси основного лазерного луча, попеременно то вперед, то назад;
i. вращающаяся пунктирная спиральная линия, соединяющая n точки отражения n зеркал, имеет эллиптическую намотку, деформирующуюся при вращении, а не фиксированную круговую намотку. Она не имеет круговой нити.
[0025] Основной недостаток этого устройства предшествующего уровня техники, когда оно используется в режиме TLAM (обозначается ABLAT на английском языке), заключается в том, что оно требует n вращающихся валов и n независимых средств для вращения этих n вращающихся валов, типа двигателя или эквивалентных, для отклонения поступающего лазерного луча в n исходящих лазерных лучей, воздействующих на n точки лазерного воздействия. Это приводит к дополнительным расходам конструкции, увеличению объема и веса, чувствительности к вибрациям, хрупкости и рискам поломок, существенно пропорциональным количеству вращающихся валов. Кроме того, это приводит к увеличению вертикальной массы устройства, что не позволяет использовать его в промышленных установках с ограниченным свободным пространством.
Техническая проблема
[0026] Из анализа уровня техники следует, что из-за вышеуказанных ограничений гибридные устройства UNDT Лазер-ЭМАП обладают, в частности, следующими недостатками A-Скан и B-Скан для контроля качества UNDT металлургических объектов, на устранение которых направлено данное изобретение:
a. гибридные устройства ЭМАП/Лазер UNDT типа деления луча (обозначаются "Beam Splitting" на английском языке) неэффективны. Поскольку они приводят к разделению поступающей лазерной мощности пропорционально количеству вторичных исходящих лучей, воздействующих на точки лазерного воздействия. В результате они снижают соотношение сигнал/шум и пропорционально ослабляют разрешающую способность контроля UNDT. Поэтому такие устройства не подходят для промышленных применений устройств UNDT, например, для контроля металлургических деталей, где требуется высокоэнергетические лазерные импульсы;
b. неподвижные гибридные устройства ЭМАП/Лазер UNDT типа с непрерывным движением лучей (обозначаются на английском языке как "Beam Splitting") очень хрупки и чувствительны к вибрациям. Они требуют большой площади в направлении, перпендикулярном плоскости воздействия. Поэтому такие устройства непригодны для промышленного применения устройств UNDT, например, для контроля нижней части непрерывной разливки стальных прядей на сталелитейном заводе, где вибрации очень интенсивны, а доступное вертикальное пространство ограничено;
c. гибридные устройства ЭМАП/Лазер UNDT предшествующего уровня техники, типа Agile и Agile Matrix Laser Transmitters (Подвижные Матричные Лазерные Излучатели) (TLAM) (обозначаются как "Agile-Beam Laser Array Transmitters" или ABLAT на английском языке), имеют немонолитный вращающийся оптический блок. Они требуют большого количества оптических/механических деталей, не связанных друг с другом и находящихся в независимом вращательном движении. Они требуют большого количества вращающихся валов и большого количества независимых средств вращения этих вращающихся валов, типа двигателя или эквивалентных, которые обычно пропорциональны количеству точек лазерного воздействия. Поэтому они резонансные и чувствительны к вибрациям. Они дорогостоящие. Их цена, как правило, пропорциональна количеству точек лазерного воздействия. Из-за большого количества двигателей и вращающихся валов с осями, не коллинеарными с поступающим лазерным лучом, они громоздки для вертикального направления к плоскости лазерного воздействия, то есть в направлении, перпендикулярном зоне управления. Кроме того, их немонолитный вращающийся оптический блок влечет за собой риск демонтажа при высоких скоростях вращения; и, следовательно, влечет за собой риски безопасности, поскольку не защищает от лазерных лучей высокой энергии, которые могут быть случайно отклонены от их траектории. Таким образом, эти устройства ни технически, ни экономически, ни с точки зрения безопасности не подходят для контроля устройств UNDT металлургических деталей в суровых промышленных условиях. Они также непригодны для промышленного применения с ограниченным свободным пространством, например, для контроля нижней поверхности стальной пряди на сталелитейном заводе, где нижнее вертикальное пространство между опорными роликами непрерывной разливки весьма ограничено.
[0027] Уровень техники не предполагает эффективного, безопасного и экономичного технического решения для конфигурирования устройства UNDT с целью оснащения металлорежущего станка, который:
a. осуществляет непрерывное сканирование металлических деталей в неблагоприятной среде, с ограниченным свободным пространством и при повышенном уровне вибраций; и, в частности,
b. осуществляющий контроль качества крупносортных стальных слябов с целью обнаружения и объективной характеристики их поверхностных и подповерхностных несплошностей в процессе (или после) их непрерывной разливки на металлургических заводах; данным,
c. с единым монолитным вращающимся оптическим блоком, состоящим из механических и/или оптических частей, жестко связанных друг с другом, вращающихся вокруг одной оси вращения, и,
d. в котором вращающийся оптический блок приводится в действие одним приводным двигателем;
e. точки падения вторичных лазерных лучей которых центрованы по нескольким удаленным пунктирным линиям воздействия;
f. пятна лазерного воздействия вторичных лазерных лучей тонкие и прямоугольные; и направлены вдоль различных осей ориентирования, в частности, перпендикулярно; и,
g. чьи акустические электромагнитные преобразователи EMAT имеют предпочтительные ориентирования для улавливания индуцированных ультразвуковых сигналов, генерируемых несплошностями, которые геометрически построены относительно ориентированных прямоугольных пятен лазерного воздействия, для обеспечения обнаружения и квалификации несплошностей металлической детали, содержащие любые основные ориентировки дефектов, как продольные, так и поперечные.
Краткое описание изобретения
[0028] Коротко, целью настоящего изобретения является создание нового оптико-электромагнитно-акустического UNDT гибридного ЭМАТ/Лазер устройства, включающего монолитно вращающийся оптический блок типа TLAM (на английском языке обозначается ABLAT), обеспечивающий маневренное мультифокальное наведение лазерных лучей, для оснащения металлорежущего станка, осуществляющего контроль качества металлообработки, в зоне управления поверхности металлической заготовки.
[0029] Устройство, согласно изобретению, относится к типу, который работает посредством следующей комбинации:
a. Процесс Импульсного Излучения, осуществляемый лазерными лучами, генерирующими Лазерные Импульсы в Зоне Управления, индуцируемой механические колебания в теле Металлической Заготовки, и,
b. Контроль под средством ультразвуковых Индуцированных Сигналов от Электромагнитных Акустических Преобразователей ЭМАП, возникающих при взаимодействии Механических Колебаний с Поверхностными и Подповерхностными Несплошностями в Теле Металлической Заготовки, которые должны быть охарактеризованы.
[0030] Изобретение относится к гибридному устройству UNDT ЭМАП/Лазер конкретного типа, описанного ниже. Устройство включает:
a. Вращающийся Вал;
b. Поступающий Лазерный Источник;
c. Вращающийся Оптический Блок;
d. Средства Вращения;
e. монолитный Блок Отражателя; и,
f. Сенсорный Блок.
[0031] вращающийся вал обеспечивает вращение вокруг оси вращения. источник поступающего лазерного излучения оснащен средствами оптического наведения, сконфигурированными для формирования поступающего лазерного луча с определенной мощностью поступающего лазерного излучения, направленного вдоль оси поступающего луча, параллельной оси вращения, расположенной на определенном расстоянии от оси вращения. вращающийся оптический блок настроен на вращение вокруг оси вращения. Средства вращения включают приводной двигатель, соединенный с вращающимся валом. он сконфигурирован так, чтобы обеспечить его вращение вокруг оси вращения с непрерывным направлением вращения по часовой стрелке либо против часовой стрелки. блок отражателя является частью вращающегося оптического блока. он состоит из множества (по крайней мере, двух) зеркал, действующих как оптический барьер.
[0032] Каждое из зеркал сконфигурировано таким образом, что в определенных положениях вращения вращающегося оптического блока:
a. зеркало перехватывает ось поступающего луча; и,
b. зеркало представляет собой точку отражения (i) расположенную на определенном расстоянии отражения в направлении, перпендикулярном оси вращения при вращении, (ii) для отражения поступающего лазерного луча, попавшего на это зеркало (m), (iii) с изменением углового направления луча, и (iv) с эффективностью отражения энергии поступающего лазерного луча, равной по существу ста процентам.
[0033] сенсорный блок состоит из множества (по меньшей мере двух) электромагнитных акустических преобразователей эмап-типа. их активный электромагнитный зонд обращен к зоне управления и, по существу, центрирован на точке обнаружения в зоне управления. каждый активный электромагнитный зонд сконфигурирован для генерирования сигнала a-скан для определения положения дефектов в зависимости от времени/расстояния, полученного из ультразвуковых индуцированных сигналов вблизи его точки обнаружения.
[0034] устройство изобретения относится к типу, приводящему в дейстие вращающийся оптический блок, геометрически сконфигурированный таким образом, что при активации приводного двигателя:
a. поступающий лазерный луч последовательно воздействует на точку отражения, связанную и принадлежащую одному из его дальних зеркал;
b. каждая из точек отражения зеркал проходит по кругу вращения определенного радиуса и сосредоточена в центре вращения, закрепленном на оси вращения;
c. различные зеркала ловко перенаправляют; последовательно и прерывисто поступающий лазерный луч в соответствии со сбором вторичных лучей, состоящего из пучка удаленных вторичных лазерных лучей, возникающих в результате множества последовательных и прерывистых изменений углового направления поступающего лазерного луча путем отражения от непрерывного ряда удаленных и вращающихся зеркал;
d. вращающийся оптический блок и его зеркала геометрически сконфигурированы таким образом, что генерируемые вторичные лазерные лучи последовательно воздействуют на набор точек воздействия, состоящий из множества удаленных точек воздействия, расположенных (i) либо на плоскости воздействия, обращенной к вращающемуся оптическому блоку, расположенному на поверхности зоны управления, и вблизи точки обнаружения электромагнитного акустического преобразователя, (ii) либо на вспомогательном зеркале.
[0035] Устройство изобретения характеризуется отличительным техническим сочетанием следующих комбинированных технических характеристик:
a. его вращающийся оптический блок, включая зеркала, их механические соединительные части и связанные с ними точки отражения, во вращении (i) является монолитным, то есть состоит из механических и/или оптических частей, жестко механически связанных между собой и находящихся в фиксированном неизменном положении относительно друг друга; (ii) жестко закреплен средствами крепления на одном и том же вращающемся валу; и (iii) представляет собой жесткую геометрию, не поддающуюся деформации во время вращения;
b. зеркала блока отражателя и связанные с ними точки отражения находятся в фиксированном положении относительно одной и той же оси вращения и синхронизированы по вращению одним и тем же приводным двигателем;
c. во время вращения вращающегося оптического блока с помощью приводного двигателя: (i) точки отражения при вращении всех зеркал, взятые перпендикулярно оси вращения и относительно нее, постоянно равны друг другу и непосредственно соответствуют расстоянию луча. (ii) каждая из точек отражения всех зеркал проходит через окружность вращения с центром на оси вращения, причем каждая из них строго перпендикулярна оси вращения и имеет радиус вращения, равный ее расстоянию отражения, который постоянно равен расстоянию до луча. (iii) каждая из окружностей вращения: представляет собой проекцию, в направлении, параллельном плоскости проекции, параллельной оси вращения и проходящей через ее центр вращения, образованную из сегмента поперечного движения, перпендикулярного оси вращения и центрированного на ее центре вращения; и представляет собой проекцию в направлении, параллельном плоскости вращения, перпендикулярной оси вращения и проходящей через центр вращения, образованную из окружности плоского проецируемого движения, которая сливается с окружностью вращения и имеет радиус проецируемого вращения, который непрерывно равен расстоянию между лучами.
Решение проблемы
[0036] В упрощенном и обобщенном виде один из методов дифференциации в минимальной форме гибридного оптического электромагнитного акустического устройства UNDT ЭМАП/Лазер в соответствии с изобретением по отношению к другим устройствам того же типа из уровня техники заключается в том, чтобы отметить следующие комбинированные критерии:
a. Устройство состоит только из одного монолитного Вращающегося Оптического Блока, находящегося во вращательном движении;
b. Устройство имеет только один Вращающийся Вал и одну Ось Вращения;
c. его уникальный вращающийся оптический блок является монолитным, то есть состоит из механических и/или оптических частей, жестко соединенных между собой;
d. его уникальный вращающийся оптический блок и все его механические и/или оптические части жестко закреплены на одном и том же вращающемся валу;
e. Расстояния отражения всех зеркал в направлении, перпендикулярном оси вращения и относительно нее, всегда равны друг другу;
f. Точки отражения каждого из вращающихся зеркал проходят окружность вращения с центром на оси вращения, которая неизменно перпендикулярна оси вращения;
g. точки отражения каждого из его вращающихся зеркал расположены на вращающейся виртуальной спиральной пунктирной линии (i) с круговой цилиндрической винтовой резьбой и (ii) продольное положение которого, фиксировано в продольном направлении по отношению к одному вращающемуся валу;
h. все зеркала вращающегося оптического блока приводятся в синхронное вращение относительно одной оси вращения с помощью одного приводного двигателя.
Перечень рисунков чертежа с пояснением каждого из них
[0037] Эти и другие признаки, аспекты и преимущества настоящего изобретения, а также другие аспекты станут более очевидными, когда следующее подробное описание будет прочитано со ссылкой на сопроводительные чертежи, иллюстрирующие изобретение; на которых идентичные символы обозначают идентичные части на всех чертежах.
[0038] [Фиг. 1] представляет собой вид спереди устройства изобретения в его схематическом виде.
[0039] [Фиг. 2] представляет собой вид в перспективе устройства изобретения в его схематическом виде.
[0040] [Фиг. 3] представляет собой вид в перспективе правой части устройства изобретения в схематичном виде.
[0041] [Фиг. 4] представляет собой вид в перспективе центральной части устройства изобретения в схематичном виде.
[0042] [Фиг. 5] представляет собой частичный перспективный вид устройства изобретения в схематическом виде, на котором изображены окружности вращения, виртуальный цилиндр отражения и вращающаяся спиральная линия, на которой закреплены вращающиеся зеркала.
[0043] [Фиг. 6] представляет собой вид спереди устройства изобретения в схематическом виде, на котором изображены окружности вращения, виртуальный цилиндр отражения и вращающаяся спиральная линия, на которой закреплены вращающиеся зеркала.
[0044] [Фиг. 7] представляет собой частичный перспективный вид устройства изобретения в схематическом виде, на котором показаны детали виртуального цилиндра отражения и вращающаяся спиральная линия, на которой закреплены вращающиеся зеркала.
[0045] [Фиг. 8] представляет собой частичный вид спереди устройства изобретения, показывающий деталь виртуального цилиндра отражения и вращающуюся спиральную линию, на которой отображается угловой наклон вращающихся зеркал.
[0046] [Фиг. 9] представляет собой вид слева устройства изобретения в схематическом виде.
[0047] [Фиг. 10] представляет собой упрощенный вид в перспективе устройства изобретения в конфигурации, включающей монолитную сборку вращающихся цилиндрических дисков, на которых закреплены вращающиеся зеркала.
[0048] [Фиг. 11] представляет собой упрощенный вид спереди устройства изобретения в конфигурации, включающей монолитную сборку вращающихся цилиндрических дисков, на которых закреплены его вращающиеся зеркала.
[0049] [Фиг. 12] представляет собой частичный вид в перспективе устройства изобретения, где показана деталь конфигурации, включающей монолитный блок вращающихся цилиндрических дисков, на которых закреплены вращающиеся зеркала.
[0050] [Фиг. 13] представляет собой частичный увеличенный вид в перспективе устройства изобретения, на котором показана деталь конфигурации, включающая монолитную сборку вращающихся цилиндрических дисков, на которых закреплены вращающиеся зеркала, а также их геометрические конфигурации.
[0051] [Фиг. 14] представляет собой вид в перспективе устройства изобретения, где показана конфигурация, включающая первый узел жесткости, изготовленный из полых жестких трубок, расположенных сверху в цилиндре жесткости.
[0052] [Фиг. 15] представляет собой вид в перспективе устройства изобретения, где показана конфигурация, включающая первый узел жесткости, выполненный из расположенных вверху полых жестких труб, расположенных в соответствии с цилиндром жесткости, вложенным в периферию монолитного блока вращающихся цилиндрических дисков, на котором закреплены его вращающиеся зеркала.
[0053] [Фиг. 16] представляет собой частичный вид в перспективе устройства изобретения, где показана увеличенная деталь конфигурации, включающая первый узел жесткости из расположенных сверху полых жестких трубок, распределенных по цилиндру жесткости, вложенному в периферию монолитного блока вращающихся цилиндрических дисков, на котором закреплены его вращающиеся зеркала.
[0054] [Фиг. 17] представляет собой вид в перспективе устройства изобретения, где показана конфигурация, включающая второй узел жесткости, изготовленный из нисходящих полых жестких труб, расположенных в соответствии с цилиндром жесткости.
[0055] [Фиг. 18] представляет собой вид в перспективе устройства изобретения, где показана конфигурация, включающая первый узел жесткости, выполненный из восходящих полых жестких труб, и второй узел жесткости, выполненный из расположенных нисходящих полых жестких труб; оба расположены в соответствии с цилиндром жесткости и размещены на периферии монолитного блока вращающихся цилиндрических дисков, на котором закреплены его вращающиеся зеркала.
[0056] [Фиг. 19] представляет собой частичный увеличенный вид в перспективе детали конфигурации, представленной на [Фиг. 18], где показано относительное расположение первого и второго узлов жесткости по отношению к вращающимся зеркалам.
[0057] [Фиг. 20] представляет собой вид в перспективе устройства согласно изобретению, где показана конфигурация, включающая фокусирующий блок, содержащий фокусирующие линзы.
[0058] [Фиг. 21] представляет собой частичный вид в перспективе устройства изобретения, где показана конфигурация, включающая фокусирующий блок, состоящий из цилиндрических фокусирующих линз.
[0059] [Фиг. 22] представляет собой вид в перспективе устройства изобретения, где показана конфигурация, включающая фокусирующий блок, состоящий из цилиндрических фокусирующих линз, и блок вспомогательного отражателя.
[0060] [Фиг. 23] представляет собой частичный увеличенный вид в перспективе, иллюстрирующий деталь блока вспомогательного отражателя в конфигурации устройства, представленного на [Фиг. 22].
[0061] [Фиг. 24] представляет собой частичный вид в перспективе устройства изобретения, где показана конфигурация, включающая фокусирующий блок, состоящий из цилиндрических фокусирующих линз, а также вспомогательный отражатель, который показывает геометрическую конфигурацию генерируемых и отклоняемых вторичных лазерных лучей.
[0062] [Фиг. 25] представляет собой вид в перспективе устройства изобретения, где показана конфигурация, включающая фокусирующий блок, состоящий из цилиндрических фокусирующих линз, и блок вспомогательного отражателя, демонстрирующий геометрическую конфигурацию генерируемых и отклоняемых вторичных лазерных лучей, воздействующих тремя параллельными пунктирными линиями лазерных импульсов.
[0063] [Фиг. 26] представляет собой вид в перспективе устройства изобретения, где показана конфигурация, включающая фокусирующий блок, состоящий из цилиндрических фокусирующих линз, а также блок вспомогательного отражателя, демонстрирующий геометрическую конфигурацию генерируемых и отклоняемых вторичных лазерных импульсов, воздействующих тремя пунктирными линиями продольных и поперечных прямоугольных лазерных импульсов.
[0064] [Фиг. 27] представляет собой вид в перспективе устройства изобретения, где отображена конфигурация, включающая фокусирующий блок из цилиндрических фокусирующих линз и вспомогательного блока отражателя, на котором представлена геометрическая конфигурация генерируемых и отклоняемых вторичных лазерных лучей, воздействующих тремя параллельными лазерными импульсами, пунктирными линиями продольных и поперечных прямоугольных лазерных импульсов, и оптимальная геометрическая конфигурация направленных электромагнитных акустических преобразователей для обнаружения продольных и поперечных дефектов.
[0065] [Фиг. 28] представляет собой частичный вид в перспективе устройства изобретения, где показана конфигурация, включающая средства для управления угловым положением вращающихся зеркал.
[0066] [Фиг. 29] представляет собой общий вид устройства изобретения в перспективе.
[0067] [Фиг. 30] представляет собой общий вид металлорежущего станка, оснащенного двумя устройствами изобретения, для проведения контроля качества верхних и нижних граней стальных слябов в течение или после их непрерывной разливки.
Описание вариантов осуществления изобретения
[0068] Со ссылкой на рисунки [Фиг. 1], [Фиг. 2], [Фиг. 3], [Фиг. 4], [Фиг. 5], [Фиг. 6] и [Фиг. 7] показано устройство (1) типа оптико-электромагнитно-акустических UNDT гибридных электромагнитных акустических преобразователей/лазера, включающее монолитный вращающийся оптический блок (22) типа ABLAT. вращающийся оптический блок (22) обеспечивает маневренное мультифокальное наведение лазерных лучей для металлорежущего станка (2), осуществляющего контроль качества обработки металла, в зоне управления (3) поверхности (4) металлической заготовки (5).
[0069] мы видим, что устройство (1) содержит: вращающийся вал (14); поступающий лазерный источник (16); вращающийся оптический блок (22); средства вращения (24) вращающегося оптического блока (22); блок отражателя (25), являющийся частью вращающегося оптического блока (22); и сенсорный блок (33).
[0070] вращающийся вал (14) обеспечивает вращение вокруг оси вращения (15). источник поступающего лазерного излучения (16) оснащен средствами оптического наведения (17), сконфигурированными для формирования поступающего лазерного луча (18) с определенной мощностью поступающего лазерного излучения (pi), направленного вдоль оси поступающего луча (20) параллельно оси вращения (15), на определенном расстоянии луча (21) от оси вращения (15). средства оптического наведения (17) включают в себя узел первичного отражения с регулируемым углом (17-a), оснащенный первичным зеркалом с регулируемым углом (17-b), и узел вторичного отражения с регулируемым углом (17-c), оснащенный вторичным зеркалом с регулируемым углом (17-d). источник поступающего лазерного излучения (16) испускает первичный лазерный луч (18-a), отраженный под углом 90° от первичного зеркала с угловой регулировкой (17-b), во вторичный лазерный луч (18-b). вторичный лазерный луч (18-b) затем отражается под углом 90° на вторичное зеркало с угловой регулировкой (17-d) и создает поступающий лазерный луч (18).
[0071] вращающийся оптический блок (22) сконфигурирован для вращения вокруг оси вращения (15). средства вращения (24) включают в себя приводной двигатель (24-a), соединенный с вращающимся валом (14); приводное зубчатое колесо (24-b), закрепленное на валу двигателя; вращающееся зубчатое колесо (24-c), закрепленное на вращающемся валу (14); и ремень (24-d), соединяющий два зубчатых колеса для передачи вращательного движения. приводной двигатель (24-a) сконфигурирован так, чтобы побуждать вращение вращающегося вала (14) вокруг оси вращения (15) с постоянным направлением вращения (dr), либо непрерывно по часовой стрелке, либо непрерывно против часовой стрелки.
[0072] блок отражателя (25) является частью вращающегося оптического блока (22). он состоит из множества n = 24 зеркал (m, m1, m2, ..., m11, m21, ..., m24), каждое из которых действует как оптический барьер (27). каждое из зеркал (m) сконфигурировано таким образом, что в определенных положениях вращения вращающегося оптического блока (22) одно из зеркал (m, m11) перехватывает ось поступающего луча (20). каждое зеркало (m) имеет точку отражения (29, 29-11), (i) расположенную на определенном вращающемся расстоянии отражения (32) перпендикулярно оси вращения (15), (ii) для отражения поступающего лазерного луча (18), попавшего на это зеркало (m), (iii) с изменением углового направления луча (a), и (iv) с эффективностью отражения (e) энергии поступающего лазерного луча (18), равной по существу ста процентам.
[0073] сенсорный блок (33) состоит из p = 25 электромагнитных акустических преобразователей (34) эмап-типа или эквивалентных, далее именуемых эмап. их активный электромагнитный зонд (35) обращен к зоне управления (3). каждый активный электромагнитный зонд (35), по существу, центрирован в точке обнаружения (36) зоны управления (3). он сконфигурирован для генерирования сигнала а-скан (as) для определения положения дефектов (12, 13) в зависимости от времени/расстояния, полученного от ультразвуковых индуцированных сигналов (11) вблизи его точки обнаружения (36).
[0074] Можно заметить, что Вращающийся Оптический Блок (22) сконфигурирован таким образом, что он также обладает следующими техническими особенностями:
a. когда приводной двигатель (24-a) активирован, поступающий лазерный луч (18) последовательно попадает в одну из 24 точек отражения (29, 29-11), связанных и принадлежащих одному из 24 дальних зеркал (M, M11);
b. 24 различных зеркала (M, M1, M2, ..., M11, M21, ... , M24) оперативно перенаправляют последовательно и прерывисто поступающий лазерный Луч (18) в соответствии со сбором вторичных лучей (44), состоящей из пучка 24 удаленных вторичных лазерных лучей (45, 45-1, ..., 45-11, ..., 45-24), возникающих в результате множества 24 последовательных и прерывистых изменений угловых направлений пучка (a) поступающего лазерного луча (18); это происходит путем отражения от череды 24 удаленных и вращающихся зеркал (M);
c. вращающийся оптический блок (22) и его 24 зеркала (m) имеют такую геометрическую конфигурацию, что при активации приводного двигателя (24-a) 24 вторичных лазерных лучей (45, 45 -1, ..., 45-11, ..., 45-24), генерируемых последовательно, влияют на комплекс воздействий (46), состоящий из множества n = 24 удаленных точек воздействия (47, 47-1, ..., 47-11..., 47-21, ..., 47-24). они расположены: (i) для первых 20 - на плоскости воздействия (48), обращенной к вращающемуся оптическому блоку (22), расположенному на поверхности (4) зоны управления (3), и вблизи точки обнаружения (36) электромагнитных акустических преобразователей (34) ЭМАП-типа, или (ii) для следующих четырех - на вспомогательном зеркале (49, 49-21, ..., 49-24).
[0075] Мы видим, что устройство (1) представляет собой следующее новое сочетание технических характеристик, при которых:
a. вращающийся оптический блок (22), включающий 24 зеркала (м), их механические соединительные детали и 24 связанные с ними точки отражения (29, 29-11), во вращении является монолитным. То есть он состоит из механических и оптических частей, жестко связанных между собой и находящихся в фиксированном положении относительно друг друга, которое строго неизменно. он жестко закреплен крепежными средствами (23) на одном и том же вращающемся валу (14). Он имеет жесткую геометрию, которая не поддается деформации во время вращения;
b. n = 24 Зеркала (M) блока отражателя (25), входящего в состав монолитного вращающегося оптического блока (22), жестко установленных в относительно фиксированных положениях, одно относительно другого, и относительно одного и того же вращающегося вала (14);
c. n = 24 Зеркала (M) блока отражателя (25) и 24 связанные с ними точки отражения (29, 29-11) находятся в фиксированном положении относительно одной и той же оси вращения (15). Они приводятся в синхронизированное вращение одним и тем же одиночным приводным двигателем (24-a).
[0076] Со ссылкой на рисунки [Фиг. 5] и [Фиг. 6] мы видим, что расстояния отражения при вращении (32) 24 точек отражения (29, 29-11) 24 зеркал (m), в перпендикулярном направлении и относительно оси вращения (15), неизменно равны друг другу, и, по существу, равны расстоянию луча (21). мы также видим, что каждая из 24 точек отражения (29, 29-11) всех 24 зеркал (M) проходит через окружность вращения (c, c-1, ..., c-11, ...), центрированную на оси вращения (15). каждая из этих 24 окружностей вращения (c) сосредоточена на оси вращения (15) и непрерывно перпендикулярна ей. Каждая из 24 окружностей вращения (c) представляет собой проекцию, параллельную плоскости проекции, параллельной оси вращения (15) и проходящей через ее центр вращения (cr, cr-1, ... , cr-11, ...), которая имеет форму сегмента поперечного перемещения (st, st-1, ... , st-11, ...), перпендикулярного оси вращения (15) и центрированного на ее центре вращения (cr). кроме того, каждая из этих 24 окружностей вращения (c) представляет собой проекцию, параллельную плоскости вращения, перпендикулярной оси вращения (15) и проходящую через ее центр вращения (cr, cr -1, ..., cr-11, ... ), образованную окружностью плоского проецируемого перемещения (cp, cp1, ..., cp-11, ...), совпадающую с окружностью вращения (c) и имеющую радиус проецируемого вращения (rp, rp-1, ..., rp-11, ...), неизменно равный расстоянию между лучами (21).
[0077] Мы видим, что устройство (1) обладает следующими геометрическими свойствами:
a. каждая из 24 точек отражения (29) зеркала (m) расположена неподвижно по отношению к одной и той же вращающейся цилиндрической поверхности отражения (38) виртуального цилиндра отражения (39), вращающегося вокруг оси вращения (15), с постоянным круговым сечением. он вытянут по всей длине вращающегося оптического блока (22), между двумя круговыми боковыми профилями (26-a, 26-b), которые соединены с ним;
b. радиус цилиндра отражения (41) виртуального цилиндра отражения (39) постоянен и, по существу, равен радиусам вращения (37, 37-1, ..., 37-11...) каждой из 24 окружностей вращения (C, C-1, ..., C-11, ...), а также расстоянию до луча (21);
c. поперечное сечение вращающегося виртуального цилиндра отражения (39) и его вращающейся цилиндрической поверхности отражения (38) неизменно круглое;
d. продольное положение виртуального цилиндра отражения (39) фиксировано относительно вращающегося вала (14), то есть без какого-либо продольного перемещения относительно оси вращения (15), когда приведен в действие приводной двигатель (24-a);
e. 24 точки отражения (29) каждого из 24 зеркал (m) расположены на вращающейся спиральной точечной линии (43) с круговой спиральной намоткой, радиус которой равен расстоянию между лучами (21), и с круговой цилиндрической винтовой резьбой;
f. Спиральная пунктирная линия (43) неподвижна, как и ее точки на цилиндрической отражающей поверхности (38), и находится во вращении вместе с ней. Но ее продольное положение фиксировано относительно вращающегося вала (14), то есть без какого-либо продольного перемещения относительно оси вращения (15), когда приведен в действие приводной двигатель (24-a);
g. Когда приводной двигатель (24-a) приведен в действие, поступающий лазерный луч (18) непрерывно позиционируется по сути вдоль 24 последовательных прямолинейных генерированных линий отражения (42) цилиндрической отражающей поверхности (38), каждая из которых привязана к точке отражения (29) одного из 24 зеркал (m). Каждая генерированная линия отражения движется во вращении вместе с виртуальным цилиндром отражения (39), но без продольного перемещения относительно оси вращения (15).
[0078] Мы рассматриваем цилиндрическую систему координат (ccs), не показанную на рисунках и определяемую следующим образом. Полярная цилиндрическая ось (52) совпадает с осью вращения (15). Опорная плоскость (53) — это опорная плоскость вращения, перпендикулярная оси вращения (15) и пересекающая ее в определенной опорной точке отсчета (o). Тогда угловые полярные расстояния (dθ) между угловыми координатами (θ) двух последовательных точек отражения (29) спиральной пунктирной линии (43), соединяющей все точки отражения (29) и замкнутой по окружности, являются положительными и постоянными. Цилиндрические расстояния (r) между точками отражения (29) постоянны и все равны расстоянию между лучами (21). Круговой цилиндрический шаг винта (57) спиральной пунктирной линии (43) положителен и постоянен.
[0079] Постоянные угловые полярные расстояния (dθ) приблизительно равны 360°, и которые делятся на количество зеркал (n = 24). Dθ = 360° / 24 = 15°. Таким образом, в цилиндрической системе координат (ccs) общая длина отражения (z), состоящая из разницы между высотами (z1, zn) двух крайних зеркал (m1, mn), наиболее удаленных от вращающегося оптического блока (22), по существу равна шагу винта (57) спиральной пунктирной линии (43). Таким образом, блок отражателя (25) представляет угловой спектр (as) угловых координат (θ), охватывающий, по существу, 360° = 24 x 15°.
[0080] Ссылаясь на рисунок [Фиг. 8], мы рассматриваем для каждого из 24 зеркал (m, m11) его радиальный сегмент (63), соединяющий его точку отражения (28) с его точкой проекции (64) на оси вращения (15). Мы видим, что для каждого зеркала (m, m11) и относительно его плоскости ориентации (65), проходящей через точку отражения (29, 29-11) и перпендикулярной радиальному сегменту (63); радиальный сегмент (63) имеет постоянную радиальную длину (62), равную расстоянию между лучами (21). Угол поворота (ar) равен нулю и составляет 0°. Вращающийся угол продольного наклона (ap) одинаков для всех 24 зеркал (m). А продольное положение точки проекции (64) каждого радиального сегмента (63) фиксировано относительно оси вращения (15) и относительно вращающегося вала (14). Таким образом, все 24 вторичных лазерных луча (45, 45-11 и т.д.) Параллельны и расположены в одной плоскости вторичных лучей (68), проходящей через ось вращения (15) и перпендикулярной плоскости воздействия (48). Также, они расположены в соответствии с плоской матрицей вторичных лучей (69).
[0081] кроме того, следует отметить, что угол продольного наклона (ap) каждого зеркала (m), по существу, постоянно равен 45°. а зона управления (3) и плоскость воздействия (48) параллельны оси вращения (15).
[0082] ссылаясь на рисунок [Фиг. 7], отмечаются первые 20 точек воздействия (47, 47-1) зоны управления (3). они разделены определенным расстоянием воздействия (71) между двумя соседними точками воздействия (47).
[0083] со ссылкой на рисунок [Фиг. 1] мы видим, что 24 вторичных лазерных луча (45) расположены перпендикулярно плоскости воздействия (48). вторичная длина (72) каждого из 24 вторичных лазерных лучей (45) и, следовательно, вертикальный размер (73) вращающегося оптического блока (22) сведены к минимуму.
[0084] согласно предпочтительному варианту осуществления изобретения, не показанному на рисунках, устройство (1) оснащено цифровым процессором b-скан (bsp), подключенным к 26 электромагнитным акустическим преобразователям эмап (34). он сконфигурирован для обработки и объединения информации от их сигналов а-скан (as) обнаружения. процессор в-скан (bsp) генерирует двумерное цифровое представление в-скан (75) участка металлической заготовки (5) в плоскости в-сканирования (sap), по существу совпадающей с вертикальной плоскостью вторичных лучей (68), перпендикулярной плоскости воздействия (48) зоны управления (3) металлической заготовки (5), фактически вдоль линии обнаружения (77), соединяющей пунктирную линию воздействия (70). в-скан развертка (75) отображает цифровые позиции (78) относительно глубины (79) несплошностей (12, 13) в плоскости в-сканирования (sap).
[0085] Со ссылкой на рисунки [Фиг. 9], [Фиг. 10], [Фиг. 11], [Фиг. 12] и [Фиг. 13] показана конфигурация вращающегося оптического блока (22) устройства (1), наиболее предпочтительная в соответствии с изобретением. Вращающийся оптический блок (22) состоит из механической сборки 24 геометрически идентичных опорных секций (80). Они расположены рядом друг с другом относительно оси вращения (15). К каждой из 24 опорных секций (80) прикреплено зеркало (m, m1, m2). Мы видим, что в цилиндрической системе координат (ccs), полярная цилиндрическая ось (52) которой совпадает с осью вращения (15), две соседние опорные секции (80, 80- 1, 80-24), оснащенные собственными зеркалами (m, m1, m2), находятся в поворотном положении, одна относительно другой, перпендикулярно оси вращения (15), на угловом полярном расстоянии (dθ) 15° между двумя последовательными точками отражения (29, 29-1, 29-2), принадлежащими их соответствующим зеркалам (m, m1, m-2) спиральной пунктирной линии (43).
[0086] Со ссылкой на рисунок [Фиг. 9] мы видим первый вариант предпочтительной конфигурации вращающегося оптического блока (22) устройства (1). Его 24 опорные секции (80) имеют форму удлиненной опорной балки (81), ось опоры (82) которой пересекает ось вращения (15). Каждая из 24 опорных балок (81) крепится к вращающемуся валу (14) с помощью крепежного средства (83). Зеркало (m, m1) закреплено на опорном конце (84) каждой из 24 опорных балок (81).
[0087] Со ссылкой на рисунки [Фиг. 10], [Фиг. 11], [Фиг. 12] и [Фиг. 13] мы видим второй вариант предпочтительной конфигурации вращающегося оптического блока (22) устройства (1). Его 24 опорные секции (80) каждая из которых имеют форму опорного диска (85, 85-1) плоской цилиндрической формы. Каждый опорный диск (85) снабжен крепежным отверстием (86), расположенным перпендикулярно и по центру. Диаметр отверстия (87) практически равен диаметру вращающегося вала (14). 24 опорных диска (85) устанавливаются бок о бок на оси вращения (15) и вдоль нее своими крепежными отверстиями (86), располагаясь вдоль и перпендикулярно оси вращения (15). Каждый опорный диск (85) имеет опорный корпус (88), расположенный на периферии диска (89), на котором закреплено его зеркало (m).
[0088] Со ссылкой на рисунки [Фиг. 14], [Фиг. 15], [Фиг. 16], [Фиг. 17], [Фиг. 18] и [Фиг. 19] показано дополнительное расположение конфигурации вращающегося оптического блока (22), предпочтительное в соответствии с изобретением. Вращающийся оптический блок (22) оснащен узлом жесткости (90, 90-a). Он состоит из множества жестких стержней (91). Их ось жесткости (92) параллельна оси вращения (15). Жесткие стержни (91) закреплены относительно вращающегося вала (14) и зафиксированы друг относительно друга. Каждый жесткий стержень (91) проходит по меньшей мере через одну опорную секцию (80), к которой он жестко прикреплен путем размещения по ячейкам (93) в жесткое углубление (94) этой опорной секции (80).
[0089] Мы видим, что жесткие стержни (91) расположены, по существу, вдоль прямолинейных линий генерации жесткости (95) одного и того же виртуального цилиндра жесткости (96) вращения. Ось цилиндра жесткости (97) виртуального цилиндра жесткости (96) совмещена с осью вращения (15).
[0090] Со ссылкой на рисунки [Фиг. 15], и [Фиг. 16], мы видим дополнительную компоновку второго предпочтительного варианта конфигурации (описанного выше) вращающегося оптического блока (22). Мы видим, что вращающийся оптический блок (22) состоит из механической сборки 24 опорных дисков (85), геометрически идентичных и имеющих плоскую цилиндрическую форму. Они расположены бок о бок, перпендикулярно и центрированы по отношению к оси вращения (15). Каждый опорный диск (85) имеет опорный корпус (88), расположенный на периферии диска (89), на котором закреплено его зеркало (m). Узел жесткости (90) состоит из жестких стержней (91), каждый из которых представляет собой прямолинейную жесткую полую трубку (98). Каждый из них внутри образует пустой продольный канал (99, 99-a), пересекающий его из стороны в сторону, в соответствии с осью жесткости (92). Каждый продольный канал (99) расположен, по существу, вдоль прямолинейной линии генерации жесткости (95) виртуального цилиндра жесткости (96). Расстояние каждого продольного канала (99) относительно оси вращения (15) неизменно и, по существу, равно радиусу отражающего цилиндра (41) и расстоянию между пучками (21). Таким образом, виртуальный цилиндр жесткости (96) совмещен с виртуальным цилиндром отражения (39) вращения. Жесткие полые трубки (98; 98-a) вставляются в последовательные дисковые выемки (100), предусмотренные на периферии диска (89) некоторых из 24 опорных дисков (85).
[0091] Со ссылкой на рисунки [Фиг. 14], [Фиг. 15] и [Фиг. 16] видно, что узел жесткости (90) включает в себя трубчатый узел жесткости восходящего потока (90-a), состоящий из жестких полых трубок восходящего потока (98-a), которые имеют различные длины трубок (101). Жесткие полые трубки восходящего потока (98-a) имеют геометрическую конфигурацию, так что каждая из них проходит в продольном направлении между, (i) с одной стороны, концом трубки восходящего потока (102-a), расположенным вблизи одной и той же боковой поверхности восходящего потока (103-a) первого опорного диска (104-a) вращающегося оптического блока (22), через который поступающий лазерный луч (18) проникает перпендикулярно, и (ii) с другой стороны, конец трубки восходящего потока (105-a), расположенный напротив зеркала (m) переменного конкретного промежуточного опорного диска (106), различного для каждой жесткой полой трубки восходящего потока (98-a).
[0092] Подразумевается, что когда приводной двигатель (24-a) и источник поступающего лазерного излучения (16) активированы:
a. Оси жесткости (92) жестких полых трубок восходящего потока (98-a) находятся во вращении и перепутаны с прямолинейными линиями генерации отражения (42) виртуального цилиндра отражения (39) при вращении;
b. Поступающий лазерный луч (18) последовательно преодолевает продольный канал (99, 99-a) одной из последовательных жестких полых трубок восходящего потока (98-a) и последовательно воздействует на точку отражения (29) зеркала (m) одного из конкретных промежуточных опорных дисков (106), расположенных напротив него;
c. Трубчатый узел жесткости восходящего потока (90-a) одновременно обеспечивает (i) жесткость и защиту от продольных вибраций вращающегося оптического блока (22), и (ii) защиту безопасности путем инкапсуляции поступающего лазерного луча (18) во время вращения вращающегося оптического блока (22).
[0093] Со ссылкой на рисунки [Фиг. 17] и [Фиг. 18], мы видим, что узел жесткости (90) также включает узел жесткости нисходящего потока (90-b), состоящий из жестких полых трубок нисходящего потока (98-b), которые имеют различные длины трубок (101). Жесткие полые трубки нисходящего потока (98-b) имеют геометрическую конфигурацию, так что каждая из них тянется в продольном направлении между, (i) с одной стороны, концом восходящего потока трубки нисходящего потока (102-b ), расположенным за зеркалом (m) определенного промежуточного опорного диска (106), различного для каждой жесткой полой трубки нисходящего потока (98-b); и, (ii) с другой стороны, концом трубки нисходящего потока (105-b), расположенным вблизи той же боковой поверхности нисходящего потока (103-b) последнего опорного диска нисходящего потока (104-b) вращающегося оптического блока (22). Мы видим, что 24 жесткие полые трубки восходящего потока (98-a), установлены в дисковых выемках (100) под углом 15° к периферии профиля восходящего потока (26-a). Аналогичным образом, 24 жесткие полые трубки нисходящего потока (98-b), устанавливаются в дисковые выемки (100), расположенные под углом 15° к периферии профиля нисходящего потока (26-b). Это обеспечивает точное угловое продвижение на заданную длину во время сборки.
[0094] Нам известно следующее:
a. Трубчатый узел жесткости восходящего потока (90-a) и трубчатый узел жесткости нисходящего потока (90-b) имеют схожую топологию. Они дополняют друг друга. По сути, они представляют собой изображение друг друга после зеркального отражения в сочетании с осевым вращением на 180°;
b. Комбинация трубчатого узла жесткости восходящего потока (90-a) и трубчатого узла жесткости нисходящего потока (90-b) (i) обеспечивает жесткость и устойчивость к продольным вибрациям вращающегося оптического блока (22) по всей его длине во время вращения и (ii) служит в качестве направляющей для легкой и точной сборки и углового продвижения на заданную длину опорных дисков (85) в сочетании с боковыми профилями (26-a, 26-b);
c. Жесткие полые трубки нисходящего потока (98-b), никогда не подвергаются воздействию поступающего лазерного луча (18).
[0095] Со ссылкой на рисунки [Фиг. 20] и [Фиг. 21] показан третий предпочтительный вариант конфигурации устройства (1) изобретения. Устройство (1) оснащено фокусирующим блоком (107), состоящим из фокусирующих линз (108), закрепленных относительно оси вращения (15) и плоскости воздействия (48). Эти фокусирующие линзы (108) расположены между вращающимся оптическим блоком (22) и плоскостью воздействия (48). Их оптическая ось (109) перпендикулярна плоскости воздействия (48).
[0096] Далее видно, что фокусирующий блок (107) оснащен цилиндрическими фокусирующими линзами (110). Согласно изобретению, эти цилиндрические фокусирующие линзы (110) могут быть цилиндрического или полуцилиндрического типа. В приведенном варианте это линзы полуцилиндрического типа. Они имеют ось оптического цилиндра (111), по существу, параллельную плоскости воздействия (48).
[0097] Можно заметить, что цилиндрические фокусирующие линзы (110) сконфигурированы для фокусировки вторичных лазерных лучей (45), проходящих через них, в соответствии с узким прямоугольным пятном лазерного воздействия (112). То есть длина лазерного пятна (113) по меньшей мере в два раза больше ширины лазерного пятна (114). Таким образом, это определяет ось прямоугольного пятна (115), ориентированную в соответствии с длиной лазерного пятна (113).
[0098] Со ссылкой на рисунки [Фиг. 22] и [Фиг. 23] представлен четвертый предпочтительный вариант конфигурации устройства (1) изобретения. Устройство (1) включает в себя вторичную опору (116), находящуюся в фиксированном положении относительно оси вращения (15) и плоскости воздействия (48). Мы видим, что устройство (1) включает четыре вспомогательных блока отражателя (117, 117-a, 117-b, 117-c, 117-d). Первый вспомогательный отражатель (117, 117-a) состоит из (q = 3) вспомогательных зеркал (118, 118-a-1, 118- a-2, 118-a-3). Вспомогательные зеркала (118) приклеены к опоре вспомогательного зеркала (116-a-1, 116-a-2, 116-a-3) с регулируемой угловой ориентацией по тангажу и рысканию. Каждая опора вспомогательного зеркала (116-a-1, 116-a-2, 116-a-3) закреплена на вторичной опоре (116). Таким образом, все вспомогательные зеркала (118) находятся в фиксированном положении между собой и относительно вторичной опоры (116). Вспомогательные зеркала (118, 118-a-1, 118-a-2, 118-a-3) расположены и имеют геометрическую конфигурацию для отклонения, путем последовательного отражения, вспомогательных лазерных лучей (119, 119-a-1, 119-a-2, 119-a-3, 119-a-4), относящихся к сбору вспомогательных лучей (120, 120-a, 120-b, 120-c, 120-d), первому отклоненному лучу (119-a-1), который состоит из одного из последних четырех вторичных лазерных лучей (45, 45-21), излучаемых вращающимся оптическим блоком (22).
[0099] На вспомогательные зеркала (118, 118-a-1, 118-a-2, 118-a-3) последовательно воздействует один из вспомогательных лазерных лучей (119, 119-a-1, 119-a- 2, 119-a-3), ранее воздействовавших на вспомогательную точку отражения (121, 121-a-1, 121-a-2, 121-a-3) этого вспомогательного зеркала (118, 118-a-1, 118-a-2, 118-a-3), каждый раз последовательно изменяя угловое направление луча (a) ранее отразившегося вспомогательного лазерного луча (119, 119-a-1, 119 -a-2, 119-a-3).
[0100] Вспомогательное зеркало восходящего потока (122, 118-a-1) вспомогательного блока отражателя (117, 117-a) расположено на пути вторичного лазерного луча (45, 45-21). Вспомогательное зеркало восходящего потока (122, 118-a-1) имеет геометрическую конфигурацию, позволяющую воздействовать этим вторичным лазерным лучом (45, 45-21) на его вспомогательную точку отражения (121, 121-a-1) и отражать первый вспомогательный лазерный луч (119, 119-a-2), отклоненный от сбора вспомогательных лучей (120, 120-a).
[0101] Вспомогательное зеркало (123, 118-a-3) вспомогательного блока отражателя (117, 117-a) геометрически сконфигурировано так, чтобы быть обращенным, по существу, как к (i) последнему ранее отклоненному вспомогательному лазерному лучу (119, 119-a-3) из сбора вспомогательных лучей (120, 120-a), так и (ii) к зоне управления (3). Вспомогательное зеркало (123, 118-a-3) отклоняет этот последний ранее отклоненный вспомогательный лазерный луч (119, 119-a-3) в соответствии с окончательным отклоненным вторичным лазерным лучом (124, 119-a-4, 124-a), который воздействует по нисходящему потоку сбора вспомогательных лучей (120, 120-a) в отклоненную точку воздействия (125, 125-a) плоскости воздействия (48) зоны управления (3), расположенную по соседству с точкой обнаружения (36) электромагнитного акустического преобразователя (34) эмап-типа.
[0102] Со ссылкой на рисунок [Фиг. 24], представлен первый дополнительный вариант четвертого варианта предпочтительной конфигурации устройства (1), описанного выше. Устройство (1) оснащено вспомогательным блоком отражателя (126, 126-1), состоящим из двух вспомогательных блоков отражателя (117, 117-a, 117-c). Эти два вспомогательных отражателя (117, 117-a, 117-c) геометрически сконфигурированы таким образом, что их по меньшей мере два отклоненных вторичных лазерных луча (124, 124-a, 124-c) параллельны и расположены в одной и той же плоскости отклоненных вторичных лучей (127, 127-1), по существу перпендикулярной плоскости воздействия (48). Они расположены в соответствии с отклоненной плоской матрицей вторичных лучей (128, 128-1). Они воздействуют на набор отклоненных воздействий (129, 129-1), состоящий по меньшей мере из двух удаленных друг от друга точек отклоненного воздействия (125, 125-a, 125-c), расположенных на прямолинейной пунктирной линии отклоненных воздействий (130, 130-1) плоскости воздействия (48) зоны управления (3).
[0103] Ссылаясь на рисунок [Фиг. 25], следует отметить, что устройство (1) оснащено фокусирующим блоком (107), состоящим из фокусирующих линз (108), расположенных неподвижно относительно оси вращения (15) и плоскости воздействия (48). Эти фокусирующие линзы (108) геометрически сконфигурированы в две группы в соответствии с расположением их оптических осей (109). Первая группа состоит из вторичных фокусирующих линз (131), чья вторичная оптическая ось (132) совпадает со вторичной осью (133) вторичного лазерного луча (45), выходящего из точки отражения (29) вращающегося зеркала (m). И в этом случае вторичная фокусирующая линза (131) закреплена напротив оси вращения (15), между виртуальным цилиндром отражения (39) при вращении и точкой воздействия (47) этого вторичного лазерного луча (45). Она сконфигурирована для фокусировки этого вторичного лазерного луча (45) в точке воздействия (47) главной пунктирной линии воздействия (70). Вторая группа состоит из вспомогательных фокусирующих линз (134), чья вспомогательная оптическая ось (135) совмещена со вспомогательной осью (136) конечного отклоненного вторичного лазерного луча (124), исходящего из конечной вспомогательной точки отражения (121, 121-b-3) вспомогательного зеркала нисходящего потока (123, 118-b-3). И в этом случае вторичная фокусирующая линза (131) закреплена напротив оси вращения (15), между виртуальным цилиндром отражения (39) при вращении и отклоненной точкой воздействия (125, 125-b) отклоненного вторичного лазерного луча (124, 124-b). Он сконфигурирован для фокусировки этого отклоненного вторичного лазерного луча (124, 124-b) на его отклоненной точке воздействия (125, 125-b) вспомогательной пунктирной линии отклоненного воздействия (130, 130-2).
[0104] Со ссылкой на рисунок [Фиг. 26], представлен второй дополнительный вариант четвертого варианта предпочтительной конфигурации устройства (1), описанного выше. Преимущественно, устройство (1) оснащено фокусирующим блоком (107), состоящим из цилиндрических фокусирующих линз (108), закрепленных относительно вторичной опоры (116); и имеющим ось оптического цилиндра (111), по существу, параллельную плоскости воздействия (48).
[0105] Эти цилиндрические фокусирующие линзы (110) сконфигурированы для фокусировки либо вторичного лазерного луча (45), либо отклоненного вторичного лазерного луча (124) в соответствии с прямоугольным пятном лазерного воздействия (112) на плоскости воздействия (48), ориентированным в соответствии с осью прямоугольного пятна (115). Эти цилиндрические фокусирующие линзы (110) геометрически сконфигурированы таким образом, что фокусирующий блок (107) разделен на две группы. Первая группа образует продольный фокусирующий сбор (137), состоящий из продольных цилиндрических фокусирующих линз (138). То есть ось их оптического цилиндра (111) является по существу продольной по отношению к оси вращения (15). Они сфокусированы на продольном прямоугольном пятне лазерного воздействия (139). Вторая группа образует сбор с поперечной фокусировкой (140), состоящий из поперечных цилиндрических фокусирующих линз (141). То есть ось их оптического цилиндра (111), по существу, направлена поперек оси вращения (15). Они сфокусированы на поперечном прямоугольном пятне лазерного воздействия (142).
[0106] устройство (1) включает в себя как плоскую матрицу вторичных лучей (69), так и две отклоненные плоские матрицы вторичных лучей (128, 128-1, 128-2). плоская матрица вторичных лучей (69) состоит из вторичных лазерных лучей (45, 45-11), излучаемых вращающимся оптическим блоком (22), которые воздействуют на точки воздействия (47) на главной пунктирной линии воздействия (70). каждая из двух отклоненных плоских матриц вторичных лучей (128, 128-1, 128-2) состоит из отклоненных вторичных лазерных лучей (124, 124-a-21, 124-b-22, 124-c-23, 124-d-24), излучаемых разными вспомогательными отражателями (126, 126-1, 126-2), которые воздействуют на отклоненные точку воздействия (125, 125-a-21, 125-b-22, 125-c-23, 125-d-24) двух вспомогательных отклоненных точек воздействия (130, 130-1, 130-2).
[0107] Как видно, в соответствии с изобретением продольные цилиндрические фокусирующие линзы (138) и поперечные цилиндрические фокусирующие линзы (141) расположены взаимодополняющим и исключительным образом в двух группах. Первая группа (110-1) фокусирует плоскую матрицу вторичных лучей (69) на ее точечной линии воздействия (70), только в соответствии с продольными прямоугольными точками воздействия лазера (139) или только в соответствии с поперечными прямоугольными точками воздействия лазера (142). В случае, описанном на рисунках, первая группа (110-1), состоящая из продольных цилиндрических фокусирующих линз (138), фокусирует плоскую матрицу вторичных лучей (69) на ее точечной линии воздействия (70) только в соответствии с продольными прямоугольными лазерными точками воздействия (47-11, 139). Альтернативно, и исключительно в отличие от предыдущей, вторая группа (110-2) фокусирует две отклоненные плоские матрицы вторичных лучей (128, 128-1, 128-2) на двух отклоненных пунктирных линиях воздействия (130, 130-1, 130-2), только согласно поперечным прямоугольным точкам лазерного воздействия (142), или только согласно продольным прямоугольным точкам лазерного воздействия (139). В случае, описанном на рисунках, вторая группа (110-2) поперечно-цилиндрических фокусирующих линз (141, 141-1, 141-2) фокусирует отклоненные плоские матрицы вторичных лучей (128) на двух отклоненных точках воздействия (130, 130-1, 130-2) только в соответствии с поперечными прямоугольными точками лазерного воздействия (142, 125-a-21, 125-b-22, 125-c-23, 125-d-24).
[0108] Со ссылкой на рисунок [Фиг. 27], представлен пятый вариант предпочтительной конфигурации устройства (1) изобретения. мы видим, что устройство (1) включает в себя блок сенсоров (33), состоящий из направленных электромагнитных акустических преобразователей (143), представляющих привилегированную направленную ориентацию зондирования (144, 144-l, 144-t) ультразвуковых индуцированных сигналов (11), генерируемых при взаимодействии механических колебаний (8) с поверхностными несплошностями (12) и/или подповерхностными несплошностями (13).
[0109] Блок сенсоров (33) сконфигурирован таким образом, что его можно разделить на две группы. первая группа образует сбор продольных сенсоров (145), состоящих из продольных электромагнитных акустических преобразователей (146, 146-t, 146-d), а именно с привилегированной направленной ориентацией сенсоров (144, 144-l), ориентированных в продольном направлении относительно оси вращения (15). и вторая группа образует сбор поперечных сенсоров (147), состоящих из поперечных электромагнитных акустических преобразователей (148, 148-t, 148-d), а именно с привилегированной направленной ориентацией сенсоров (144, 144-t) в поперечном направлении относительно оси вращения (15).
[0110] Мы видим, что поперечные прямоугольные точки лазерного воздействия (142, 15-a-21, 125-b-22, 125-c23, 125-d-24) (по количеству) в основном (на рисунке все) расположены между двумя продольными электромагнитными акустическими преобразователями (146). а продольные прямоугольные точки лазерного воздействия (139, 47-11) (по количеству) в основном (и на рисунке все) расположены напротив и выше или ниже поперечных электромагнитных акустических преобразователей (148), перпендикулярно оси вращения (15).
[0111] На рисунке [Фиг. 27] видно, что вращающийся оптический блок (22) геометрически сконфигурирован таким образом, что плоская матрица вторичных лучей (69) состоит из вторичных лазерных лучей (45, 45-11), которые воздействуют на точки воздействия (139, 47-11) основной пунктирной линии воздействия (70).
[0112] Кроме того, две отклоненные плоские матрицы вторичных лучей (128, 128-1, 128-2) состоят из двух групп отклоненных вторичных лазерных лучей (124-a, 124-c) и (124-b, 124-d), возникающих из двух вспомогательных блоков отражателей (126, 126-1, 126-2), которые воздействуют на две вспомогательные удаленные отклоненные пунктирные линии воздействия (130, 130-1, 130-2). видно, что основная пунктирная линия воздействия (70) и две вспомогательные отклоненные пунктирные линии воздействия (130, 130-1, 130-2) являются тремя параллельными осями вращения (15) и отдаленными друг от друга. согласно этой предпочтительной конфигурации изобретения, две вспомогательные отклоненные пунктирные линии воздействия (130, 130-1, 130-2) расположены по обе стороны, то есть выше и ниже основной линии воздействия (70).
[0113] На рисунке [Фиг. 27] видно, что вращающийся оптический блок (22) геометрически сконфигурирован таким образом, что главная пунктирная линия воздействия (70) сформирована только из продольных прямоугольных лазерных точек воздействия (139). А две вспомогательные отклоненные точки воздействия (130, 130-1, 130-2) сформированы исключительно из поперечных прямоугольных точек лазерного воздействия (142, 125-a-21, 125-b-22, 125-c-23, 125-d24).
[0114] На рисунке [Фиг. 27] видно, что устройство (1) и его вращающийся оптический блок (22) геометрически сконфигурирован таким образом, что его продольные электромагнитные акустические преобразователи (146, 146-t, 146-d) в основном (по количеству) (а на рисунке все) центрированы по обе стороны и поочередно по отношению к главной точечной линии воздействия (70). Кроме того, они расположены в продольном направлении рядом с поперечным прямоугольным пятном лазерного воздействия (142, 125a-21, 125-b-22, 125-c-23, 125-d-24) одной из двух вспомогательных отклоненных пунктирных линий воздействия (130, 130-1, 130-2). кроме того, его поперечные электромагнитные акустические преобразователи (148, 148-t, 148-d) в основном (по количеству) (а на рисунке все) расположены и центрированы попеременно выше и/или ниже продольных сенсоров электромагнитных акустических преобразователей (146, 146-t, 146-d), в направлении, перпендикулярном оси вращения (15).
[0115] В преимущественной конфигурации, рекомендуемой изобретением, устройство (1) дополнительно оснащено средствами контроля углового положения (149) одиночного вращающегося вала (14) и, следовательно, монолитного вращающегося оптического блока (22), вращающегося относительно оси вращения (15); и соединенного с единственным вращающимся валом (14). он также включает средства контроля и синхронизации лазерных импульсов (150), электрически соединенные с источником поступающего лазерного излучения (16) и сконфигурированные для контроля и/или синхронизации генерации лазерных импульсов источником поступающего лазерного излучения (16). он также включает средства синхронизации вращения двигателя (151), электрически соединенные с приводным двигателем (24-a).
[0116] Процессор синхронизированных лазерных импульсов и синхронизации вращения (152) электрически соединен со средством контроля углового положения (149) вращающегося вала (14). он также электрически соединен со средством синхронизации вращения двигателя (151). Он непрерывно получает данные об угловом положении вращающегося вала (14). процессор синхронизированных лазерных импульсов и синхронизации вращения (152) настраивается либо в режиме контроля двигателя (153), либо в режиме контроля импульсов.
[0117] В режиме контроля двигателя (153) процессор синхронизированных лазерных импульсов и синхронизации вращения (152) сконфигурирован для электрического управления средствами синхронизации вращения двигателя (151) в зависимости от синхронизации лазерных импульсов, генерируемых источником поступающего лазерного излучения (16). в этом режиме он адаптивно позиционирует осевое угловое положение вращающегося оптического блока (22) таким образом, чтобы число импульсов воздействия на зеркало (NIM) импульсов поступающего лазерного луча (18), воздействующих на каждое из зеркал (m, m1, ..., m20) во вращении, вблизи его точки отражения (29) вращающейся спиральной пунктирной линии (43), было неизменным (например, NIM = 2).
[0118] Альтернативно, в режиме контроля импульсов (154) процессор синхронизированных лазерных импульсов и синхронизации вращения (152) сконфигурирован для электрического управления средствами контроля и синхронизации лазерных импульсов (150) в зависимости от информации о времени осевого углового положения вращающегося оптического блока (22), непрерывно получаемой от средств контроля углового положения (149). в этом режиме он последовательно управляет синхронизацией импульсов поступающего лазерного пучка (18), так что число импульсов воздействия на зеркало (NIM) импульсов поступающего лазерного пучка (18), воздействующих на каждое из зеркал (m, m1, ..., m20) во вращении, вблизи точки отражения (29) вращающейся спиральной пунктирной линии (43), является неизменным (например, NIM = 2),
[0119] Со ссылкой на рисунок [Фиг. 28] видно, что вращающийся оптический блок (22) устройства (1) оснащен средствами контроля углового положения (149), приспособленными для реализации процесса непрерывной адаптации вращения вращающегося оптического блока (22) к синхронизации по времени лазерных импульсов, излучаемых источником поступающего лазерного излучения (16). для простоты понимания, вращающиеся опорные диски (85) не показаны. Мы видим, что средства контроля углового положения (149) включают диск углового перемещения на заданную длину (149-a). Он имеет диаметр, по существу, равный, но больший, чем диаметр боковых профилей (26-a, 26-b), соединенных с вращающимся оптическим блоком (22). он жестко установлен слева от левого бокового профиля (26-a). Таким образом, он зафиксирован относительно вращающегося вала (14) и вращается вместе с вращающимся оптическим блоком (22) вокруг оси вращения (15). Он снабжен 24 круговыми выемками (149-b), расположенными в форме кольца по периметру и отстоящими друг от друга на 15° вокруг оси. каждая круговая выемка (149-b) имеет диаметр, равный диаметру выемок, выполненных по периметру боковых профилей (26-a, 26-b). он расположен в направлении оси вращения (15) напротив этих выемок, чтобы обеспечить решение трубчатой непрерывности внутри вращающегося оптического блока (22), через которую поступающий лазерный луч (18) может последовательно проникать, чтобы достичь вращающегося зеркала (m), которое последовательно расположено напротив соответствующей ему круговой выемке (149-b) во время вращения вращающегося оптического блока (22). Диск углового перемещения на заданную длину (149-a) также имеет 24 радиальных прорези (149-c). они расположены кольцом вокруг его периферии, каждая между круговой выемкой (149-b) и периферией углового перемещения на заданную длину диска (149-a). таким образом, все 24 радиальные прорези (149-c) расположены на угловом расстоянии друг от друга на 15° вокруг оси вращения (15).
[0120] Оптический сенсор (149-d) расположен перпендикулярно диску углового перемещения на заданную длину (149-a). он закреплен на левой опоре вращения (156-a) вращающегося вала (14). таким образом, он зафиксирован относительно устройства (1). он образует зажим, открытый по обе стороны от диска углового перемещения на заданную длину (149-a), через который последовательно проходят радиальные прорези (149-c), каждая из которых связана с определенным вращающимся зеркалом (m). каждый раз, когда радиальная прорезь (149-c) проходит через оптический сенсор (149-d), то есть каждые 15°, на средство контроля углового положения (149) подается сигнал, определяющий угловое положение радиальной прорези (149-c) и, следовательно, наличие нового зеркала (m), направленного на ось поступающего луча (20). затем процессор синхронизации лазерных импульсов и времени вращения (152) автоматически выполняет временное управление, необходимое для генерации источником поступающего лазерного излучения (16) необходимого количества импульсов (nim) лазерного воздействия на зеркало поступающим лазерным лучом (18), воздействующим на вращающееся зеркало (m), обращенное к этой радиальной прорези (149-c).
[0121] Со ссылкой на рисунок [Фиг. 29] представлено устройство (1) согласно изобретению, разработанное заявителем, оснащенное импульсным источником поступающего лазерного излучения (16), который имеет следующие общие характеристики: (a) Тип: DPSS (полупроводниковый лазер с диодной накачкой).
[0122] Рабочие характеристики используемого одноимпульсного источника поступающего лазерного излучения (16) следующие:
a. Энергия: 100 мДж;
b. Частота: 100 Гц;
c. Импульсная мощность: 5 МВт;
d. Длительность импульса: 5-100 нс;
e. Длина волны: 1064 нм;
f. Диаметр пучка: 5-10 мм;
g. Размер продольных прямоугольных точек лазерного воздействия (139) и поперечных прямоугольных точек лазерного воздействия (142) при активации устройством ABLAT (1) по изобретению: 0,1-3 мм x 5-20 мм.
[0123] Устройство (1) периодически генерирует:
a. двадцать вторичных лазерных лучей (45), воздействующих на двадцать точек воздействия (47) основной пунктирной линии воздействия (70); и,
b. четыре отклоненных вспомогательных лазерных луча (119), поражающих четыре точки отклоненного воздействия (125), распределенные в группы по два, вдоль двух удаленных пунктирных линий отклоненного воздействия (130).
[0124] Со ссылкой на рисунок [Фиг. 30] показан разработанный заявителем металлорежущий станок (2) (3-d сканер), оснащенный двумя гибридными оптико-электромагнитными акустическими ЭМАП/лазерными устройствами UNDT (1, 1-a, 1-b), тип которых представлен на рисунке [Фиг. 29], каждое из которых запитывается от одного поступающего лазерного источника (16), упомянутого выше. металлорежущий станок (2) выполняет трехмерное сканирование стальных слябов (5, 159) в течение или после их непрерывной разливки на сталелитейном заводе при температуре до 1200 °C.
[0125] Первое устройство (1a) проверяет верхнюю поверхность сляба (160-a) и расположено над ней, так что его блок сенсоров (33-a), содержащий 26 электромагнитных акустических преобразователя (34), расположен напротив этой верхней поверхности.
[0126] Второе устройство (1b) проверяет нижнюю поверхность сляба (160-b) и расположено под ней, так что его блок сенсоров (33-b), содержащий 26 электромагнитных акустических преобразователя (34), расположен напротив этой нижней поверхности.
[0127] Два устройства (1a, 1b) расположены напротив друг друга, по обе стороны от стального сляба (5, 159), в вертикальной плоскости, расположенной между двумя конвейерными роликами (161-a; 161-b) конвейера (162) линии непрерывной разливки стали, по которому стальной сляб (5, 159) перемещается в продольном направлении.
[0128] Металлорежущий станок (2) оснащен роботизированным механическим блоком (163), активируемый цифровым процессором управления (167), расположенным в зоне оператора для управления (168). он включает в себя верхнюю направляющую (164-a), оснащенную верхней опорой (166-a) с моторизованным поперечным перемещением в соответствии с этой направляющей; и нижнюю направляющую (164-b), оснащенную нижней опорой (166-b) с моторизованным поперечным перемещением в соответствии с этой моторизованной направляющей. обе направляющие (164-a, 164-b) расположены горизонтально, перпендикулярно и по обе стороны от верхней и нижней поверхностей стального сляба (5, 159).
[0129] Верхнее устройство (1-a) закреплено на моторизованной верхней опоре (166-a) под верхней направляющей (164-a). таким образом, оно перемещается в поперечном направлении для адаптации своего положения к положению стального сляба (159) на конвейере (162) или для размещения в боковой зоне технического обслуживания (169).
[0130] Нижнее устройство (1-b) закреплено на моторизованной нижней опоре (166-b) над нижней направляющей (164-b). таким образом, оно перемещается в поперечном направлении для адаптации своего положения к положению стального сляба (159) на конвейере (162) или для размещения в боковой зоне технического обслуживания (169).
[0131] Механический блок (163) также включает две группы боковых моторизованных рельс (167-a, 167-b), каждая из которых образует вертикальную опорную стойку. Они расположены по обе стороны конвейера (162). Они включают в себя моторизованные средства, позволяющие регулировать вертикальное положение верхней направляющей (164-a) и, следовательно, верхнего устройства (1-a) в зависимости от потенциально изменяемой толщины проверяемых Стальных Слябов (159).
[0132] Каждое из двух Устройств (1-a, 1-b) металлорежущего станка (2) оснащено 26 электромагнитными акустическими преобразователями (34) ЭМАП-типа, описанными в патентной заявке Франции № FR2009138 на имя заявителя.
[0133] Металлорежущий станок (2) имеет такие размеры и конфигурацию, что скорость сканирования, то есть продольная скорость перемещения стальных слябов (159) относительно двух Устройств (1, 1-a, 1-b), составляет 0,150 м в секунду.
[0134] Размерные технические характеристики проверенных стальных слябов (5, 159) находятся в следующем диапазоне: (а) толщина 100-350 мм, (б) ширина 1000-2000 мм.
[0135] Металлорежущий станок (2) может автоматически и непрерывно распознавать, независимо от их ориентации, любые поверхностные несплошности (12) и подповерхностные несплошности (13) в теле (9) стального сляба (5, 159): (a) с сигналом, который на 6 дб превышает сигналы, исходящие от внутренней структуры материала стального сляба, (b) с шириной более 0,1 мм, (c) с высотой более 0,3 мм, и (d) с длиной более 10 мм.
Преимущества изобретения
[0136] Из приведенного выше описания следует, что Устройство (1) изобретения, относящееся к типу гибридных электромагнитных акустических преобразователей/лазерных преобразователей UNDT и обладает следующими преимуществами:
a. оно включает в себя единый монолитный вращающийся оптический блок (22) из механических и/или оптических частей, находящийся во вращательном движении вокруг одной оси вращения (15);
b. все его вращающиеся механические и/или оптические части жестко соединены между собой;
c. оно оснащено одним приводным двигателем (24-a) и одним Вращающимся Валом (14);
d. количество подвижных частей в нем минимально. Следовательно, его стоимость минимальна. Надежность повышается. Среднее время наработки на отказ (MTEP) (в английском языке обозначается MTBF) увеличивается. А потребность в техническом обслуживании минимальна;
e. по сравнению с устройствами предшествующего уровня техники его вертикальный размер уменьшен не менее чем на 50%. Таким образом, его промышленное применение в ограниченных условиях становится более широким;
f. вращающийся оптический блок (22) оснащен вращающимися зеркалами (m), которые механически связаны друг с другом и расположены вдоль вращающейся спиральной пунктирной линии (43) с круговой цилиндрической резьбой. когда приводной двигатель (24-a) активирован, вращающиеся зеркала (m) и вращающаяся винтовая линия (43), которая их соединяет, не совершают продольного возвратно-поступательного движения относительно оси вращения (15). Это снижает уровень вибрации и обеспечивает устойчивость к внешним вибрациям окружающей среды;
g. таким образом, вращающийся оптический блок (22) может надежно вращаться со скоростью более 3000 об/мин и, следовательно, генерировать до 1200 дальних лазерных воздействий в секунду;
h. он также имеет один из трубчатых узлов жесткости (90-a, 90-b), который одновременно обеспечивает продольную жесткость и защиту от поперечных и продольных вибраций вращающегося оптического блока (22); а также защиту путем инкапсуляции поступающего лазерного луча (18) во время вращения вращающегося оптического блока (22). Эта фундаментальная характеристика не достигается в предшествующем уровне техники;
i. монолитный вращающийся оптический блок (22) изобретения, как описано выше, позволяет (i) из одного и того же поступающего лазерного луча (18), (ii) осуществлять периодическое наведение серии маневренных мультифокальных лазерных лучей из 24 или более удаленных и параллельных исходящих лазерных лучей;
j. монолитный вращающийся оптический блок (22) изобретения позволяет периодически и с высокой частотой излучать эти 24 исходящих вторичных лазерных луча, организованных в трех параллельных плоскостях, при этом (i) группа из 20 вторичных лазерных лучей (45) воздействует на главную пунктирную линию воздействия (70), состоящую из 20 лазерных воздействий; и, (ii) группа из четырех отклоненных вторичных лазерных лучей (124, 124-a-21, 124-b-22, 124-c-23, 124-d-24) воздействует на две вспомогательные отклоненные точечные линии воздействия (130-1, 130-2), каждая из которых состоит из двух лазерных воздействий, параллельных и удаленных от главной точечной линии воздействия (70);
k. он обеспечивает квазисохранение энергии между поступающей лазерной мощностью (pi) и исходящей лазерной мощностью (PO) каждого вторичного лазерного луча;
l. это позволяет из одного поступающего лазерного луча (18) с определенной поступающей лазерной мощностью (PI) периодически выпускать исходящие лазерные лучи той же мощности на 24 точки воздействия с частотой до 1200 герц. Такая частота лазерного воздействия не может быть достигнута в предшествующем уровне техники по механическим причинам;
m. при заданной мощности поступающего лазерного излучения (pi) и заданном объеме устройства (1) значительно увеличивается количество, энергия и частота лазерных импульсов (7) в зоне управления (3), а также количество, амплитуда и отношение сигнал/шум сигналов а-скан (as), регистрируемых электромагнитными акустическими преобразователями (34) ЭМАП-типа.
n. А значит, экономично и надежно повышает разрешение контроля качества Металлической Заготовки (5).
[0137] Вращающийся оптический блок (22) типа ABLAT, описанный и сконструированный заявителем, позволяет периодически осуществлять 24 лазерных выстрела с частотой 1200 герц по 24 точкам воздействия, распределенным в зоне управления (3) длиной 1200 мм, при этом занимая площадь по вертикали менее 300 мм. Ни одно из известных гибридных оптико-электромагнитно-акустических устройств типа UNDT ЭМАП/Лазер не может достичь таких характеристик при столь минимальных требованиях к площади.
[0138] Благодаря комбинации (a), с одной стороны, продольных цилиндрических фокусирующих линз (138), фокусирующих продольные прямоугольные точки лазерного воздействия (139), и поперечных цилиндрических фокусирующих линз (141), фокусирующих поперечные прямоугольные точки лазерного воздействия (142); и, (b) с другой стороны, продольные электромагнитные акустические преобразователи (146) с привилегированной направленной чувствительной ориентацией (144) в продольном направлении и поперечные электромагнитные акустические преобразователи (148) с привилегированной направленной чувствительной ориентацией (144) в поперечном направлении; устройство (1) обнаруживает и квалифицирует поверхностные несплошности (12) и подповерхностные несплошности (13) в теле (9) металлической заготовки (5), имеющей любую ориентацию, причем при преимущественно продольном уклоне лучше, чем при преимущественно поперечном уклоне. Эта фундаментальная характеристика не достигается в предшествующем уровне техники.
[0139] Стоимость изготовления устройства типа ЭМАП/лазерных преобразователей UNDT в соответствии с уровнем техники для непрерывного контроля торца стального сляба шириной 1200 мм в настоящее время оценивается научным сообществом в 1 миллион евро. Технология изобретения позволяет с помощью одного Источника Поступающего Лазерного Излучения (16) снизить эту стоимость в пять раз при эквивалентных характеристиках, производительности и разрешении контроля.
Промышленная применимость
[0140] Изобретение дает ценные промышленные преимущества и находит применение в металлургической промышленности, а также во всех областях машиностроения и строительства.
[0141] Изобретение предлагает промышленное применение для автоматизированного неразрушающего контроля и 2D и/или 3D ультразвукового сканирования крупных металлургических объектов, в частности, для непрерывного 3D сканирования и определения характеристик поверхностей и/или подповерхностных несплошностей этих крупных металлических объектов. Таким образом, изобретение позволяет улучшить контроль качества металлических строительных деталей.
[0142] Предпочтительные промышленные применения изобретения относятся к В-Сканированию и/или С-Сканированию и/или высокопроизводительной непрерывной 3D NDT визуализации поверхностных и внутренних несплошностей, при производстве больших и толстых металлургических конструкций и/или промышленных компонентов из проводящего материала, такого как сталь или алюминий.
[0143] Первое основное промышленное применение изобретения заключается в непрерывном трехмерном неразрушающем контроле стальных слябов во время их непрерывной разливки, в жестких промышленных условиях и при повышенной температуре (выше 1000°C) на сталелитейном заводе.
[0144] Вторым основным промышленным применением изобретения является 3D NDT генерация топологических параметров несплошностей стальных слябов в процессе их непрерывной разливки с целью их использования для оптимальной ручной или автоматической настройки параметров оборудования для динамического сокращения (обозначенного как "Dynamic Soft Reduction" или DSR на английском языке) линии непрерывной разливки стали на металлургическом комбинате.
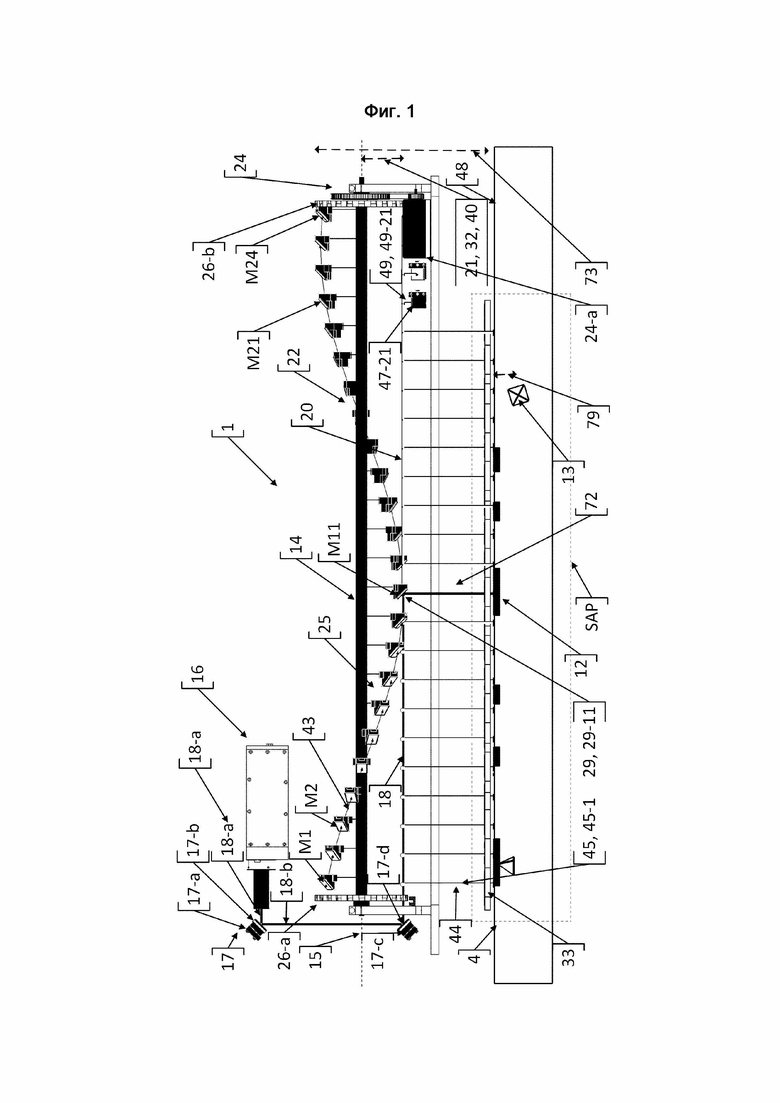
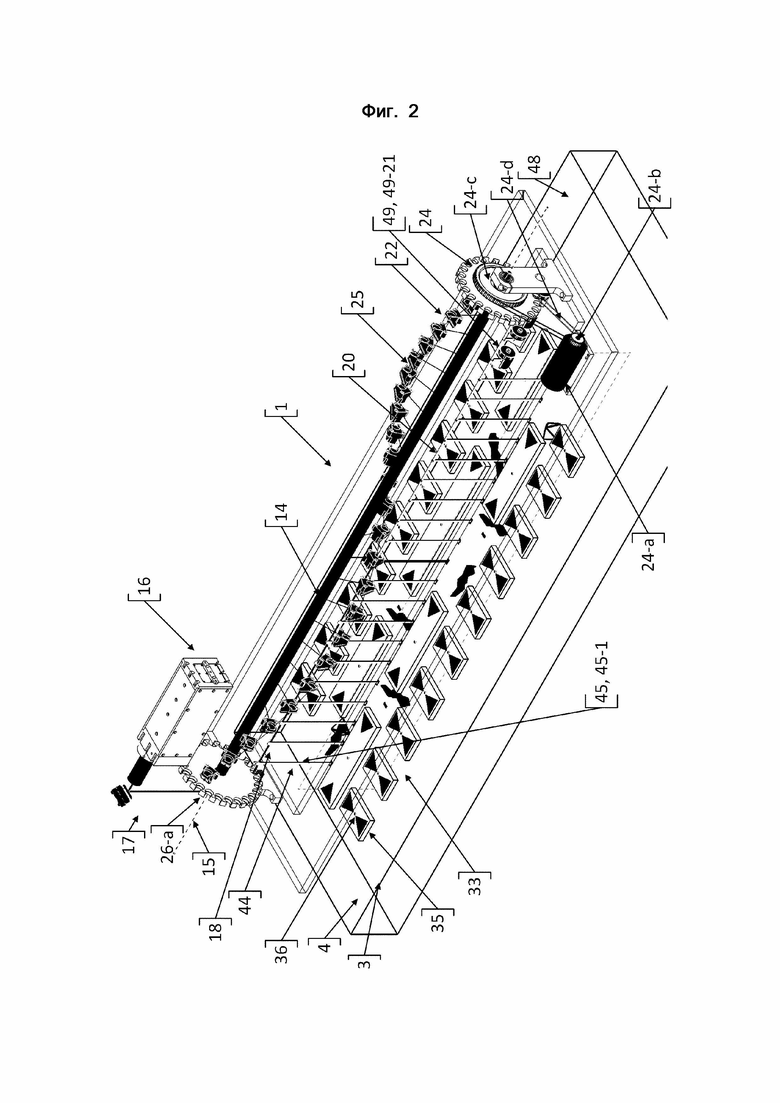
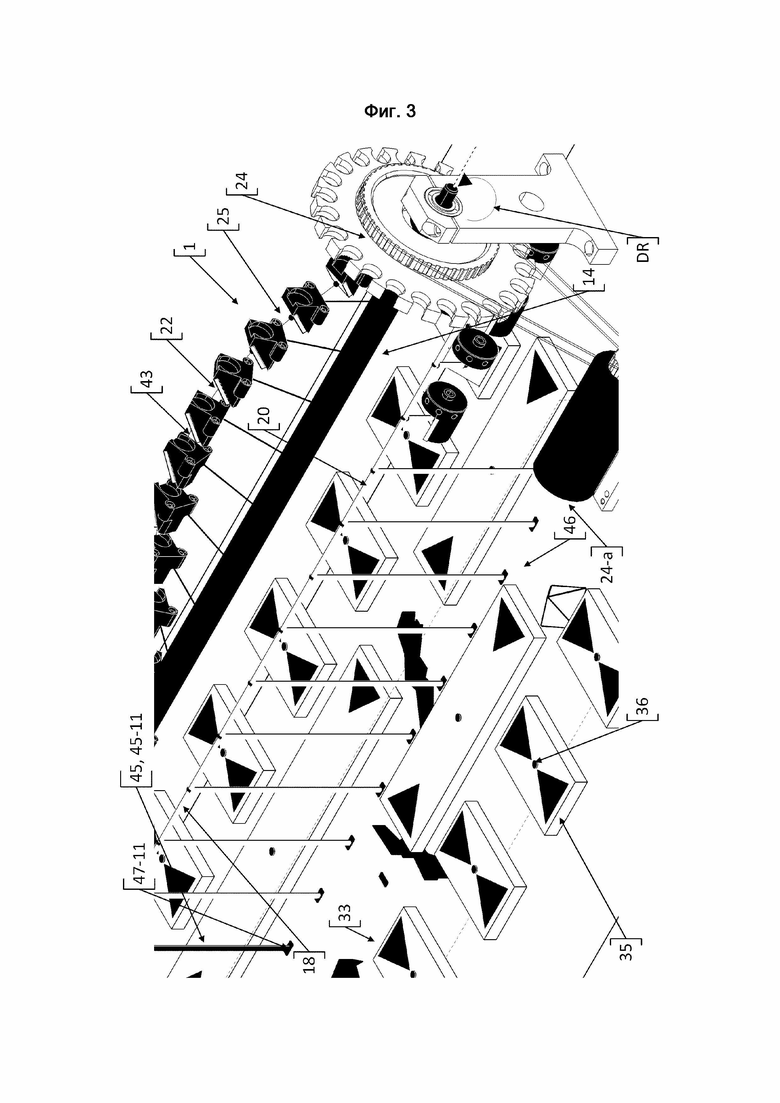
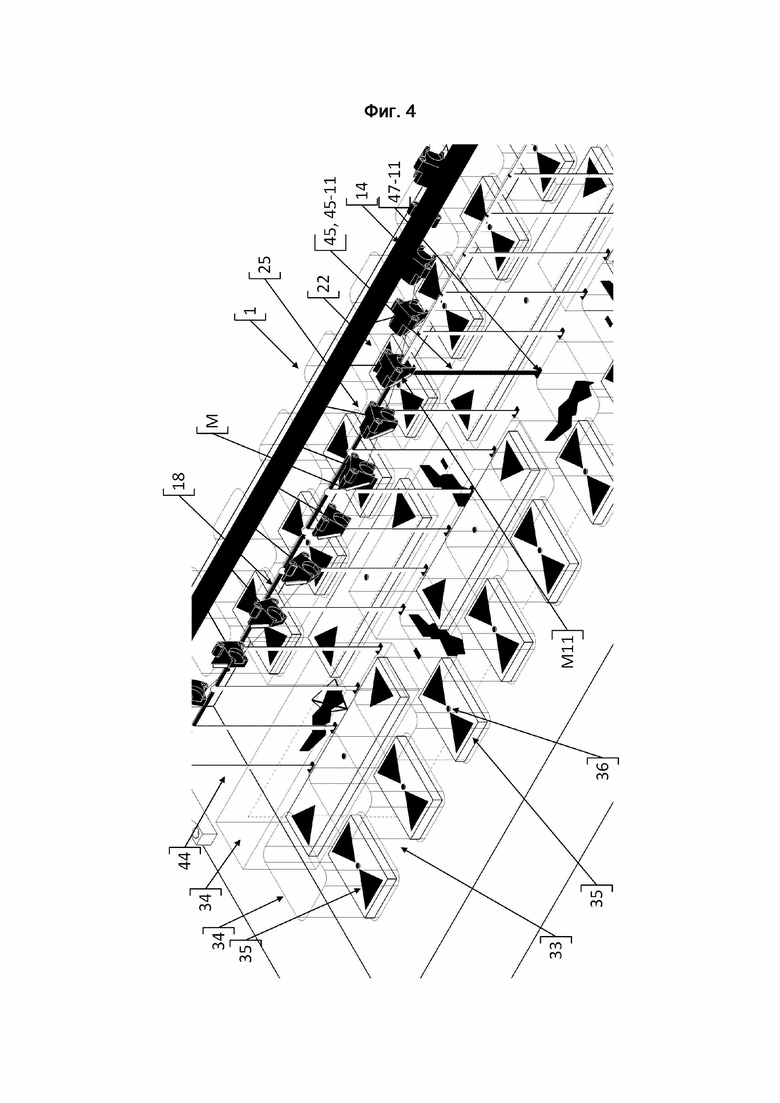

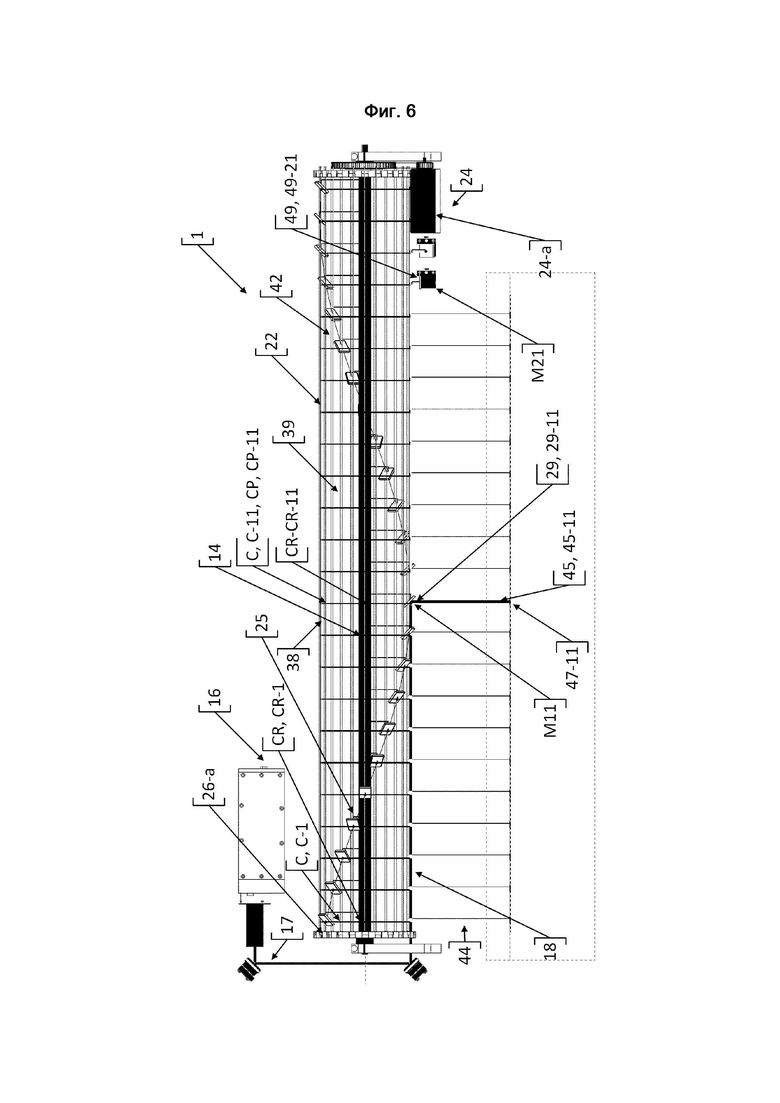
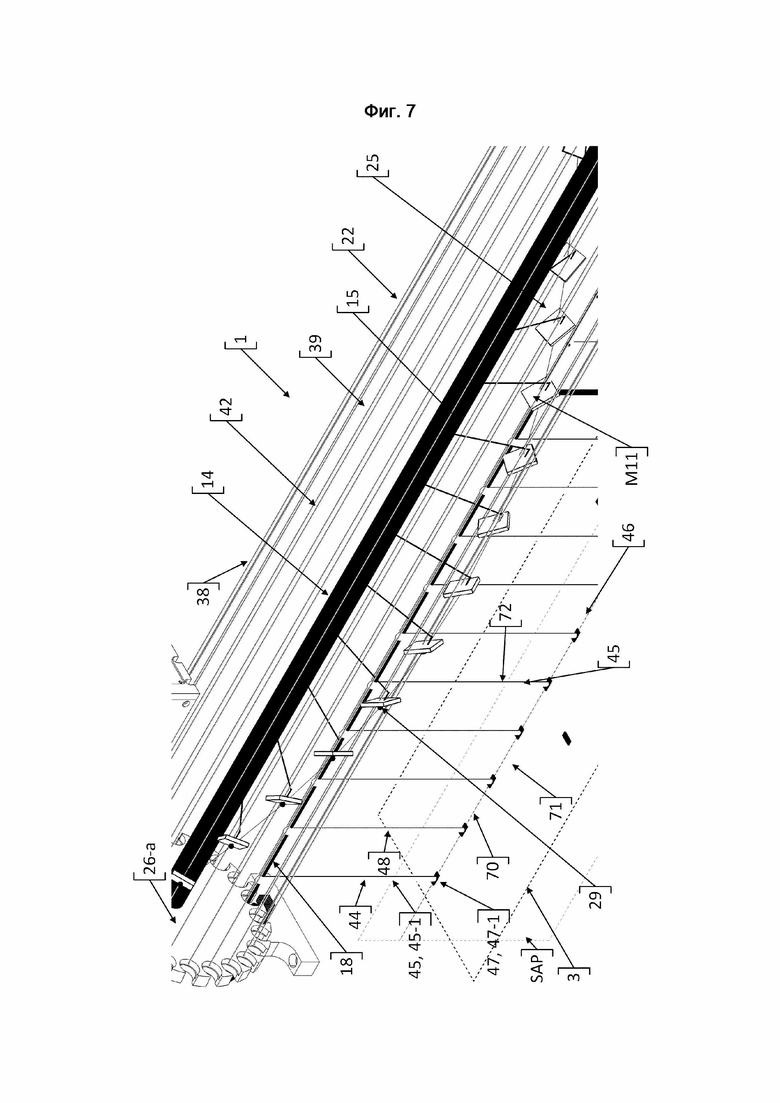
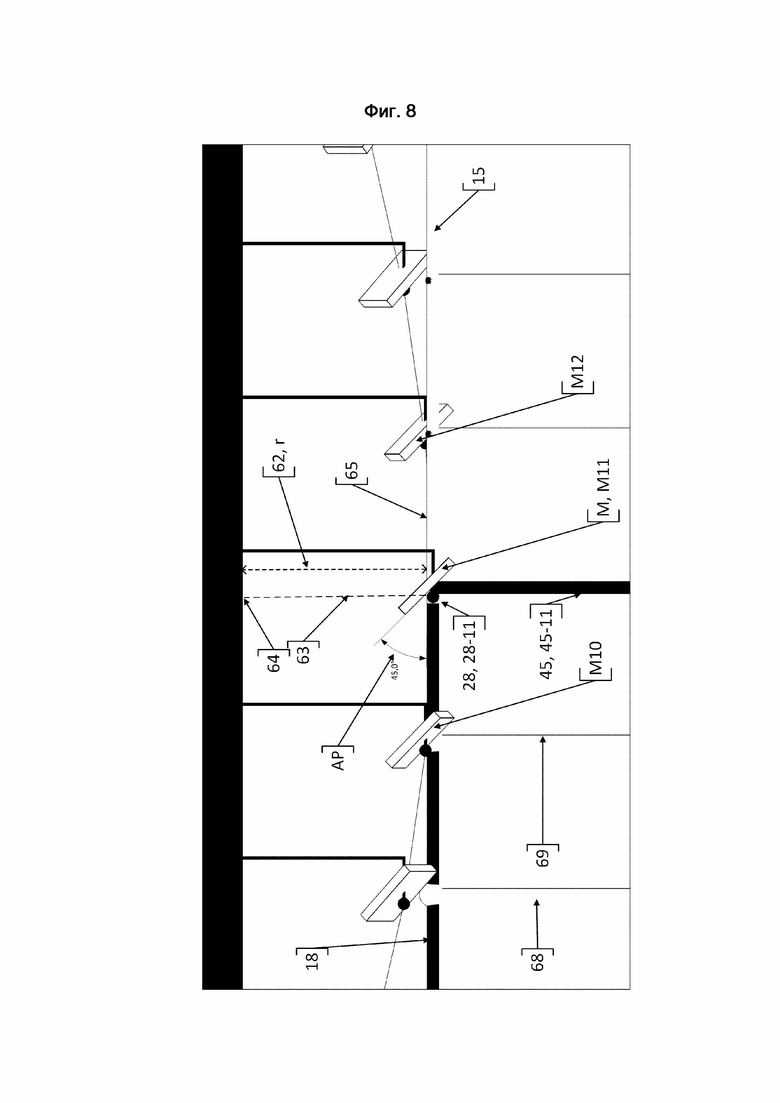
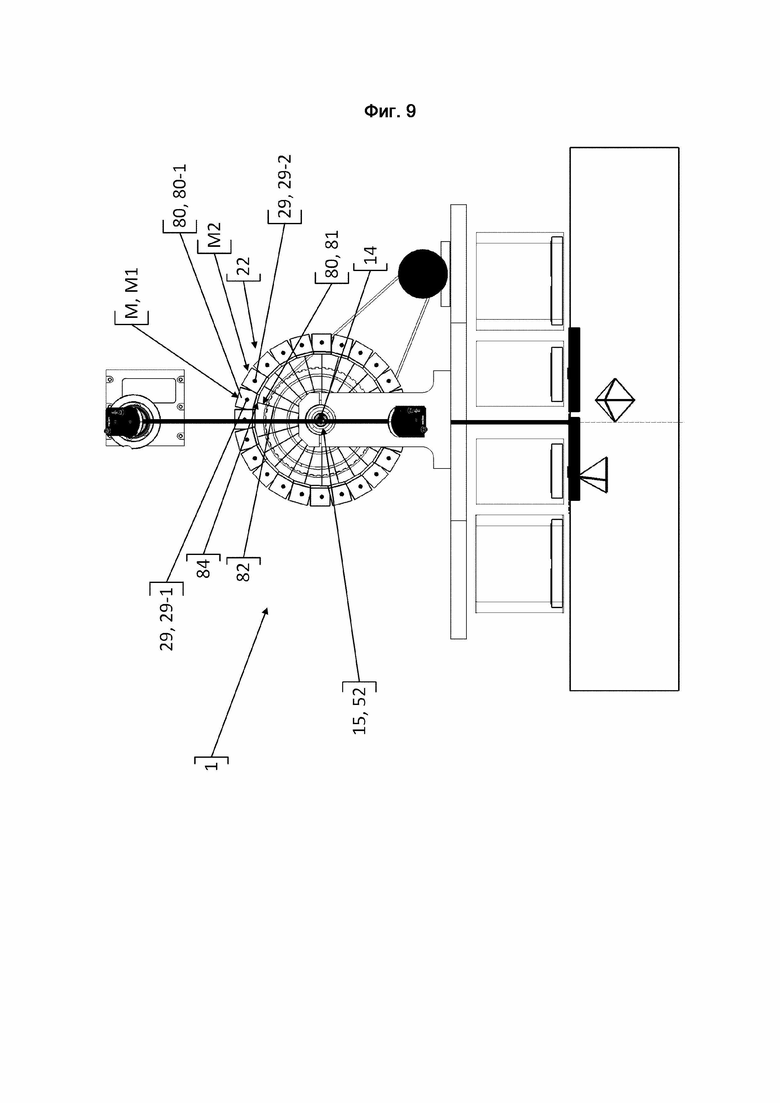
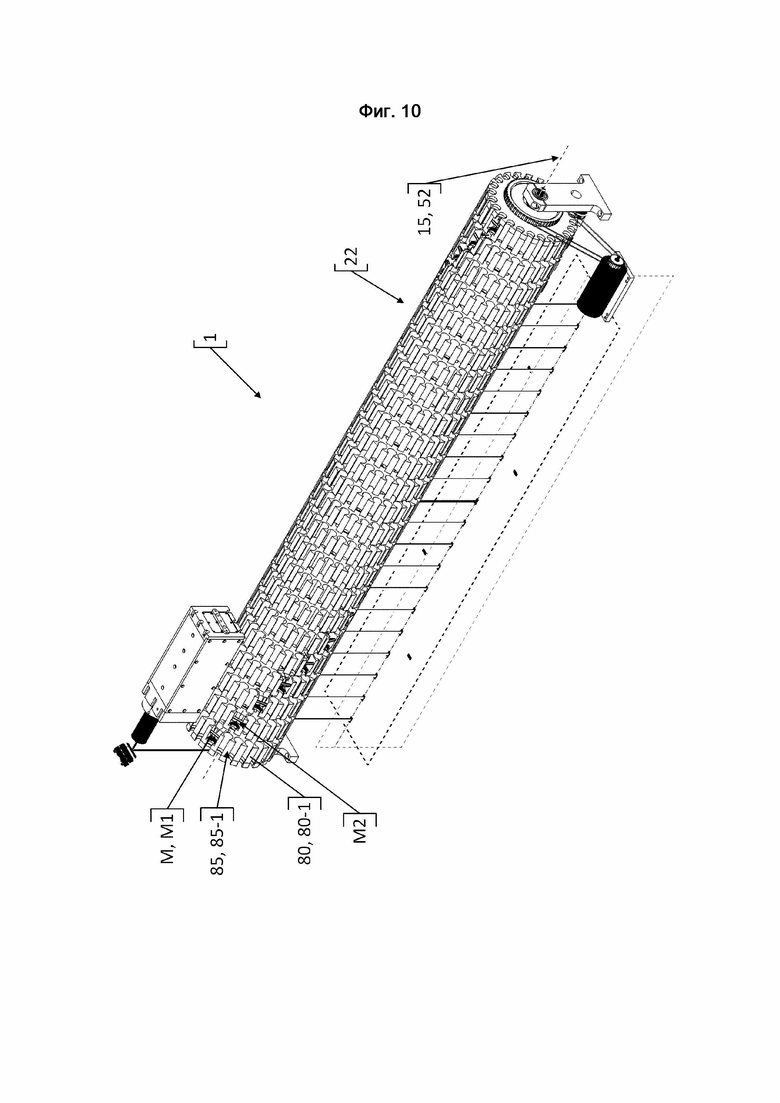
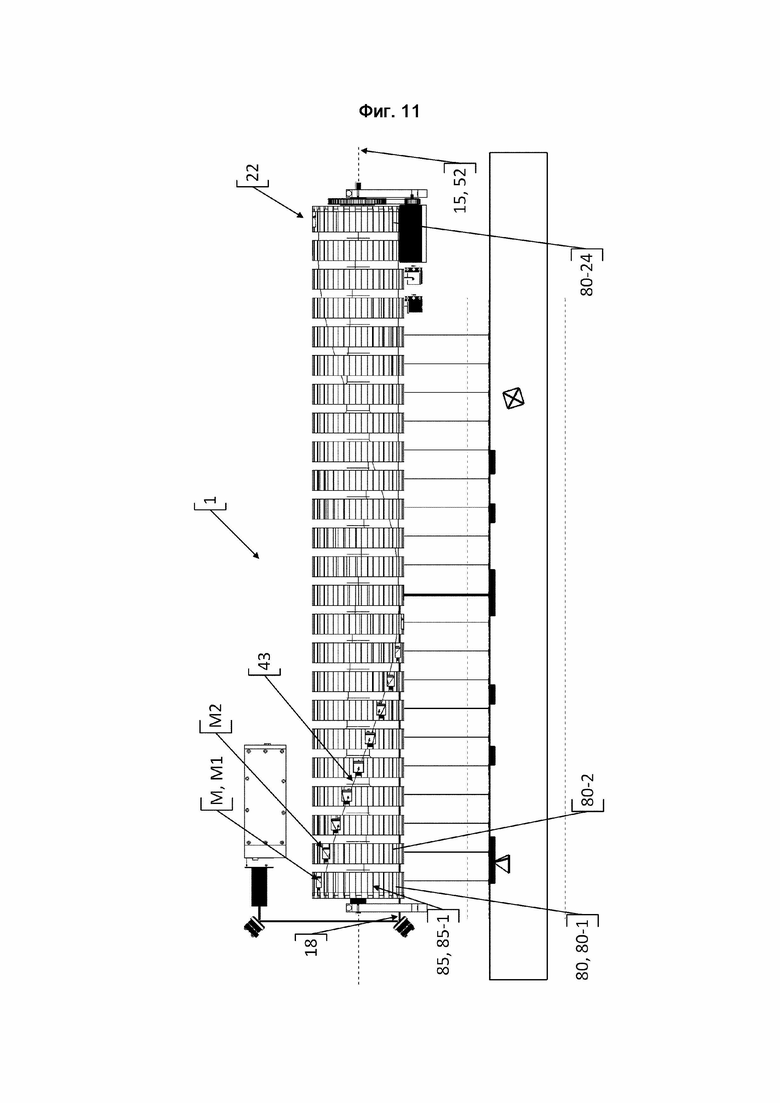
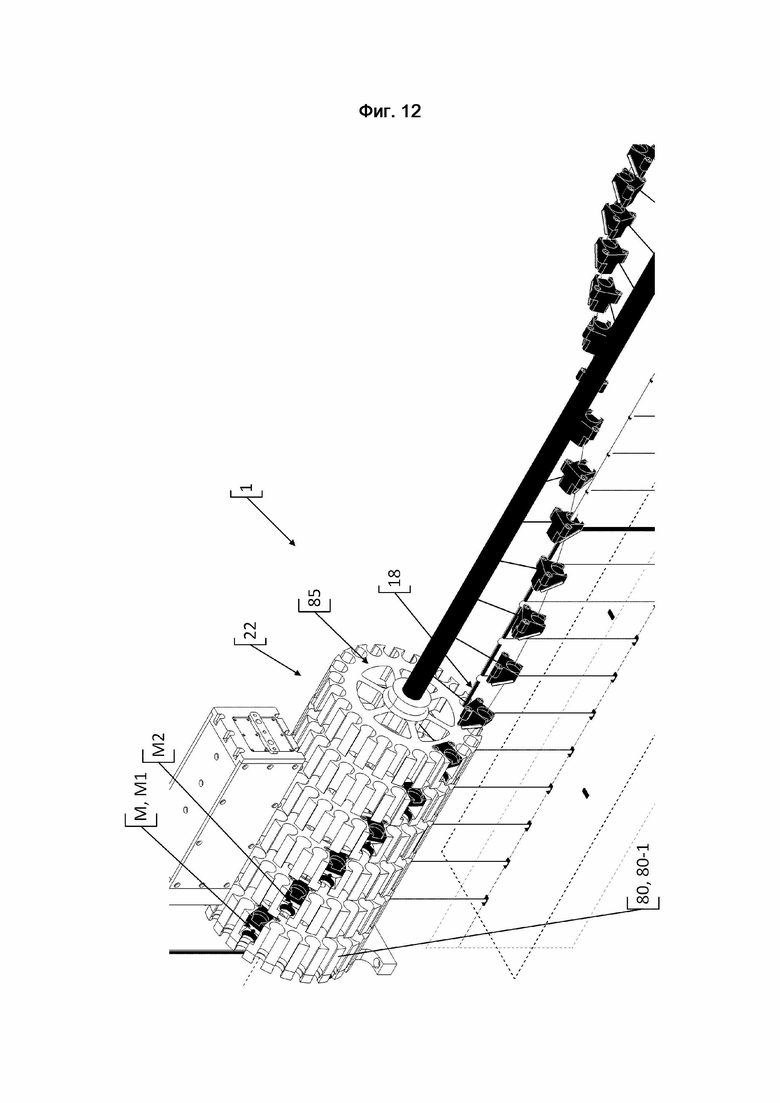
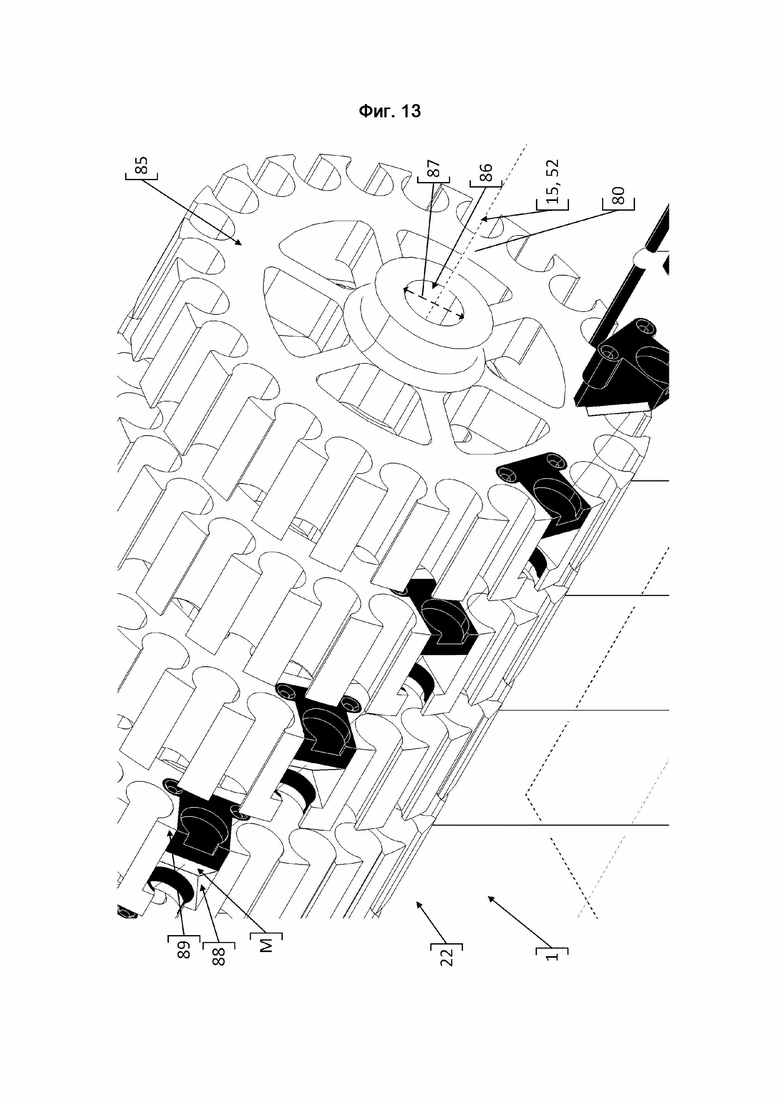
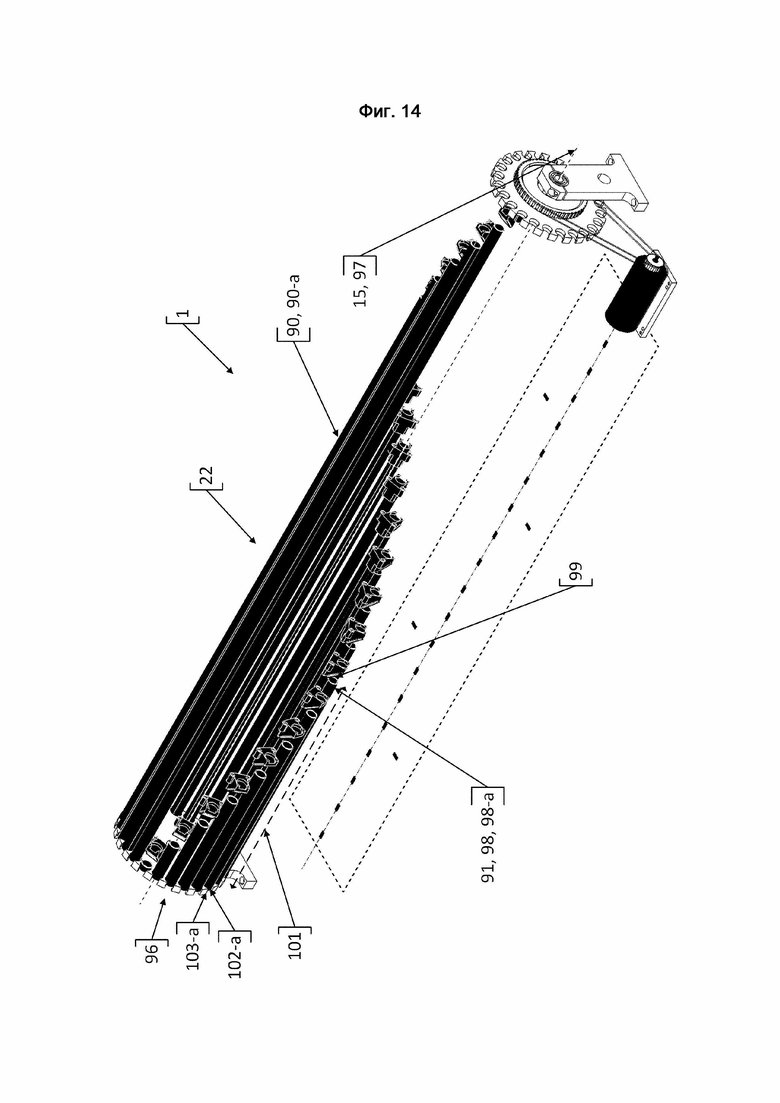


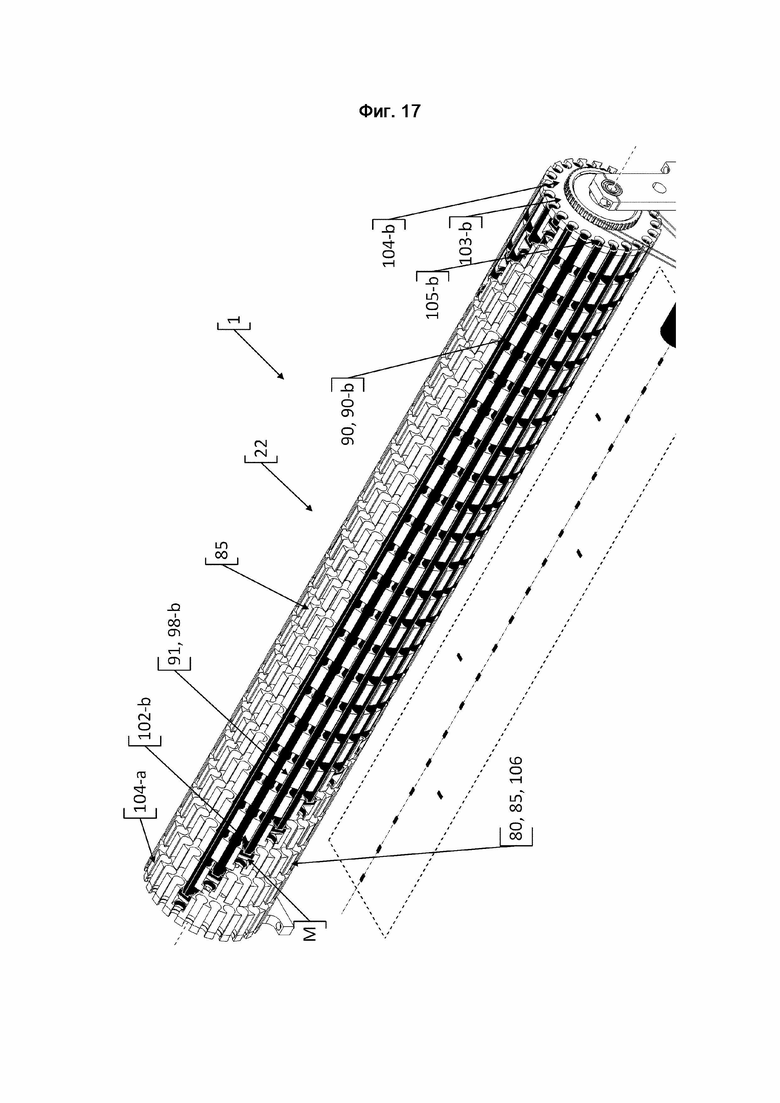
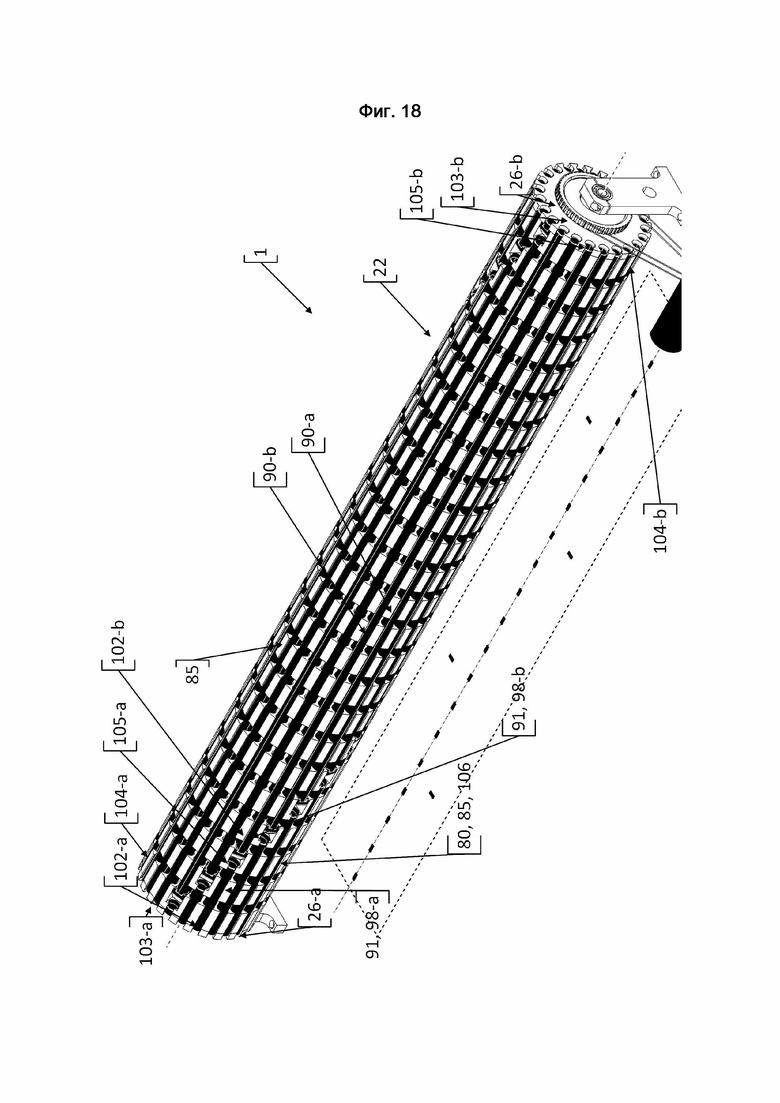
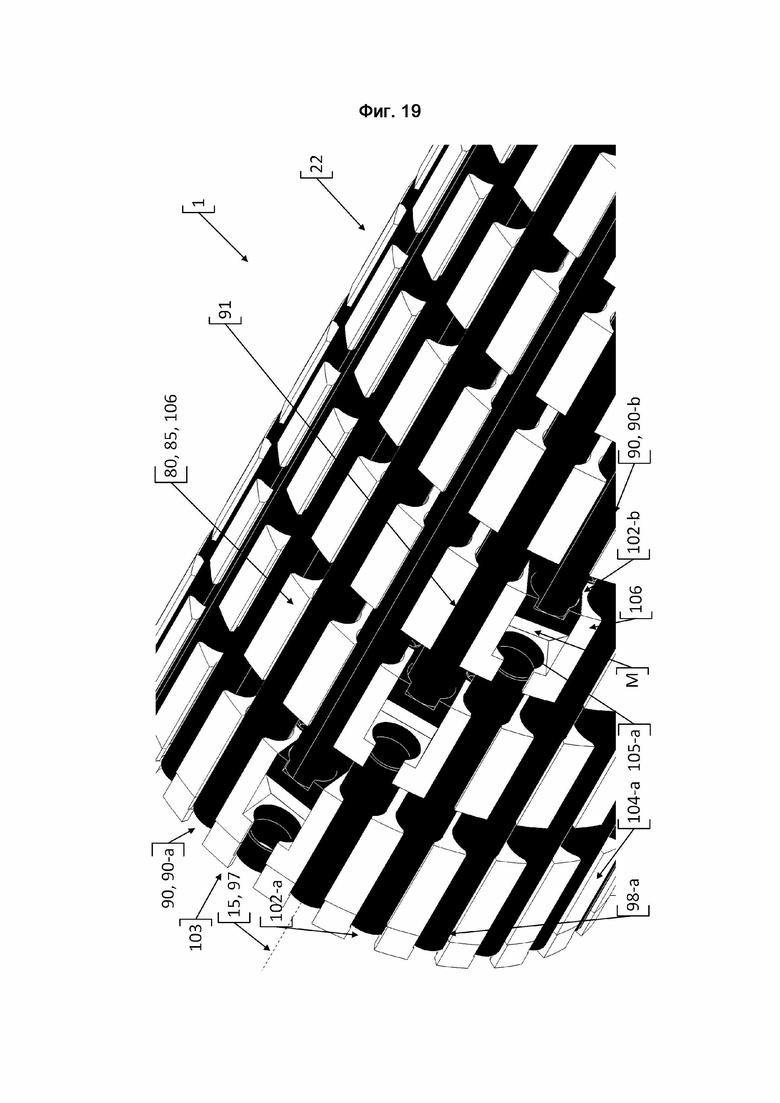
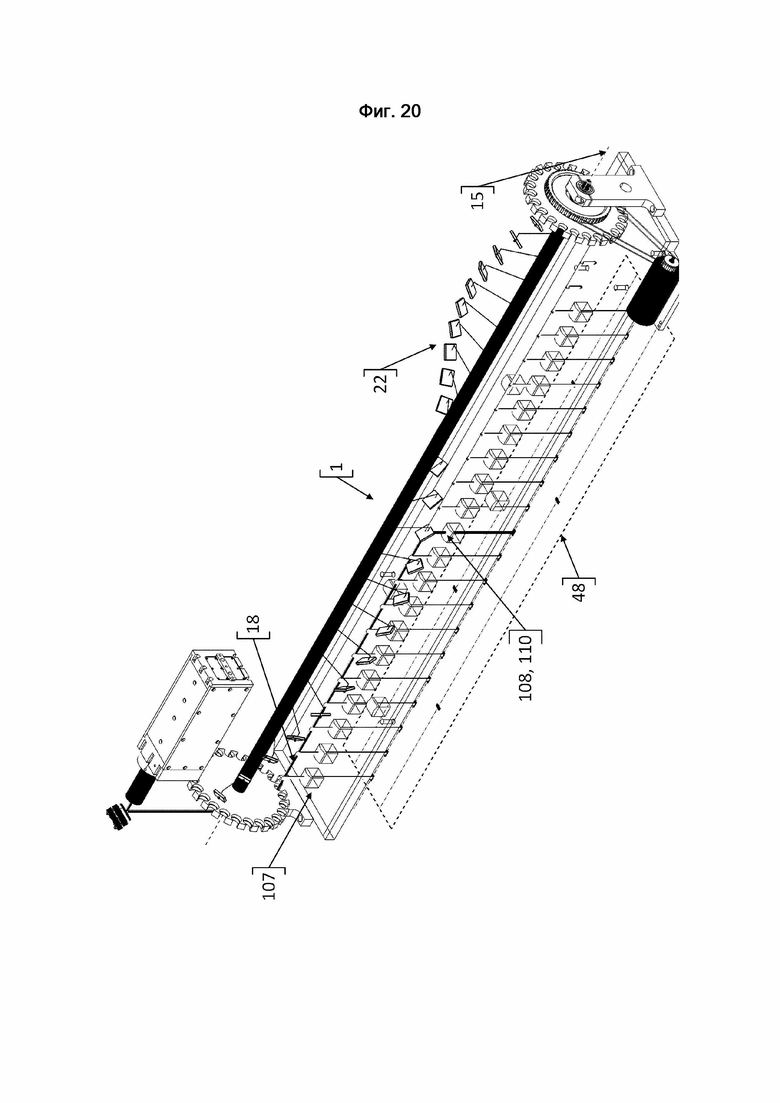
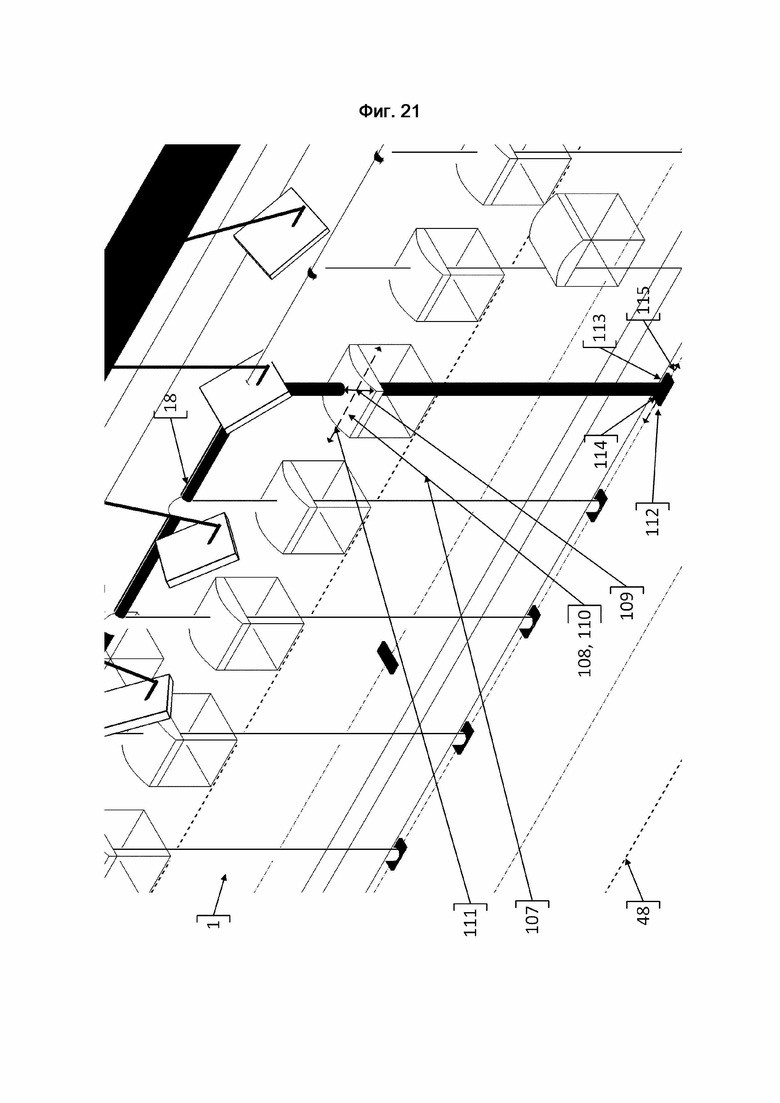

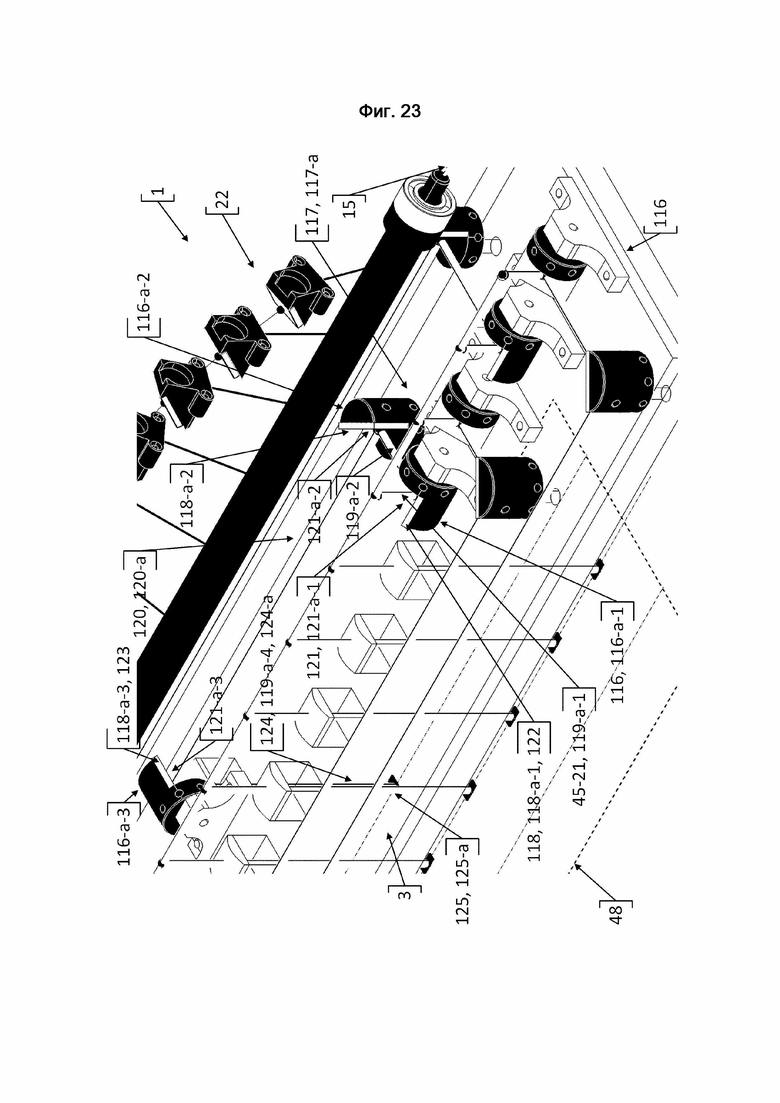
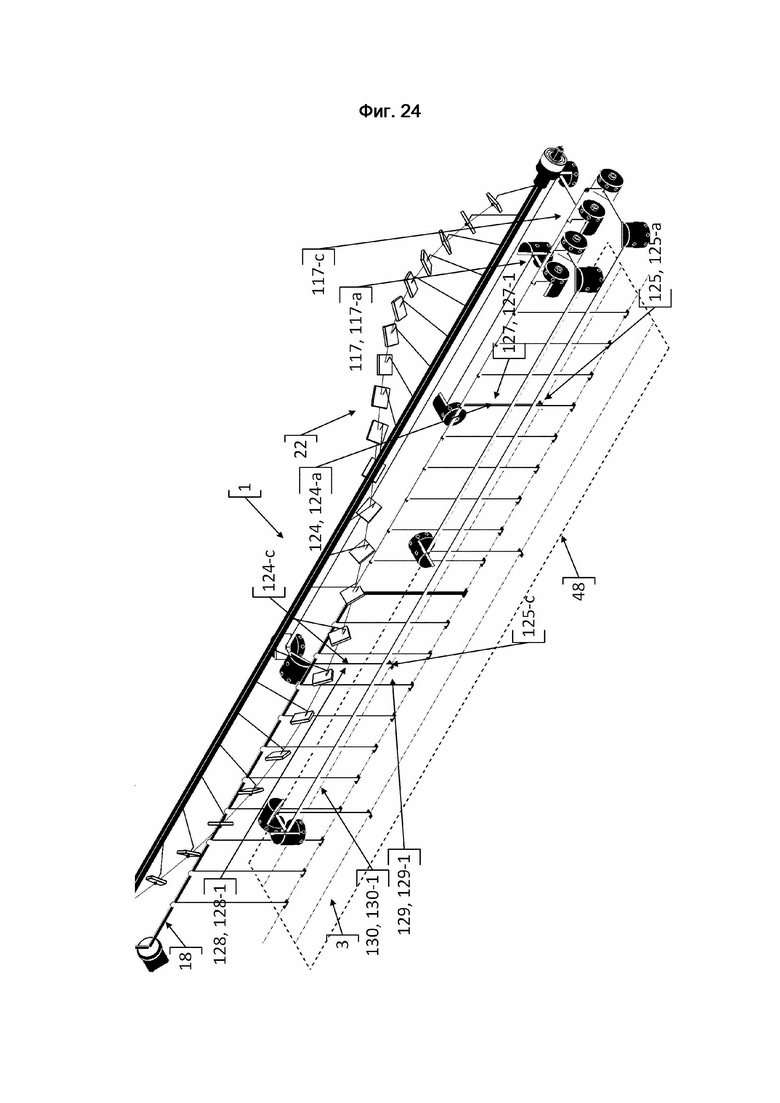
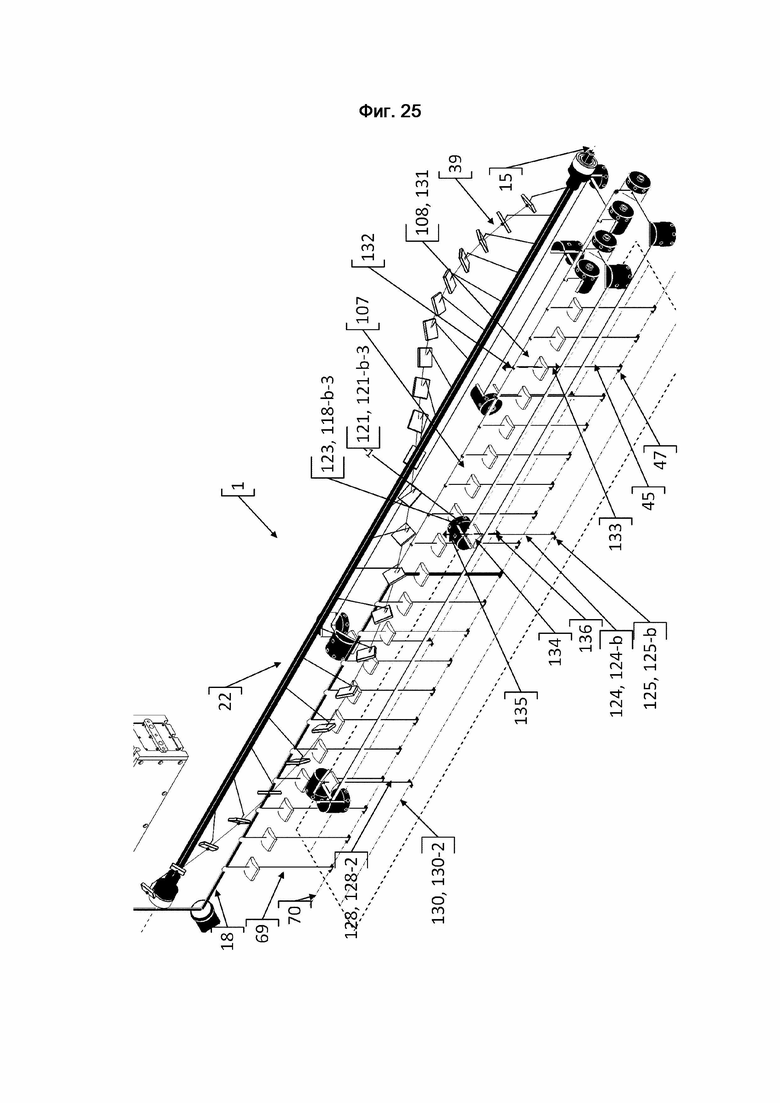
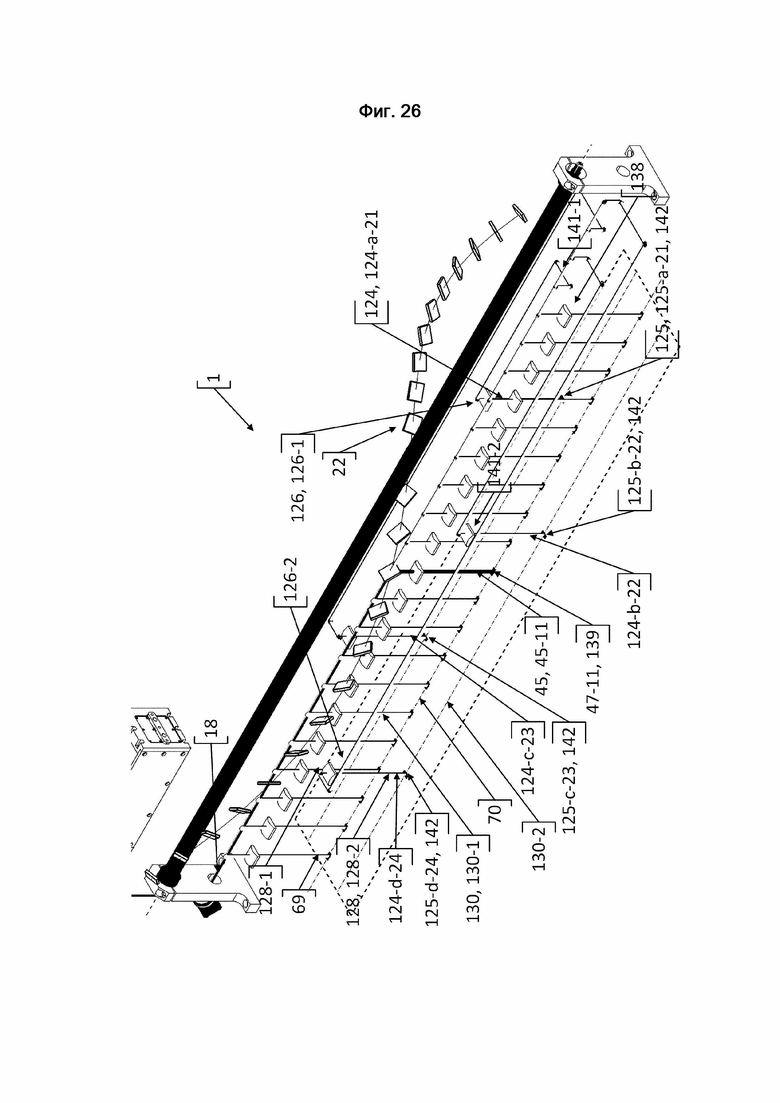
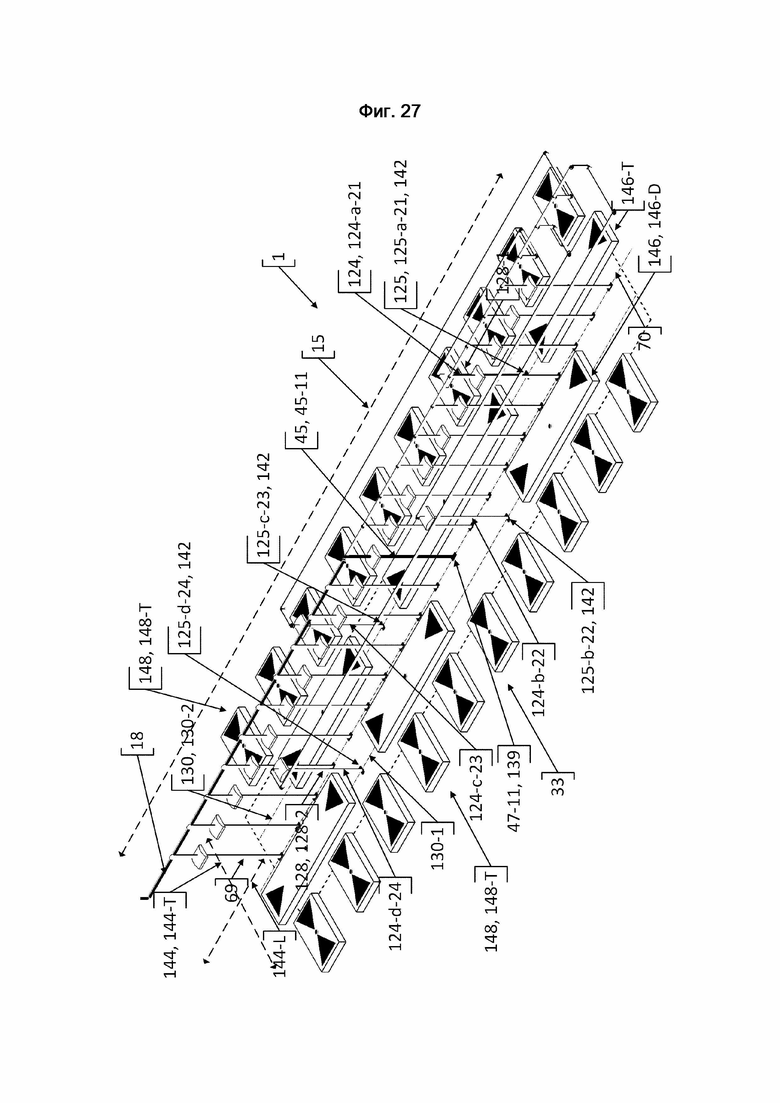
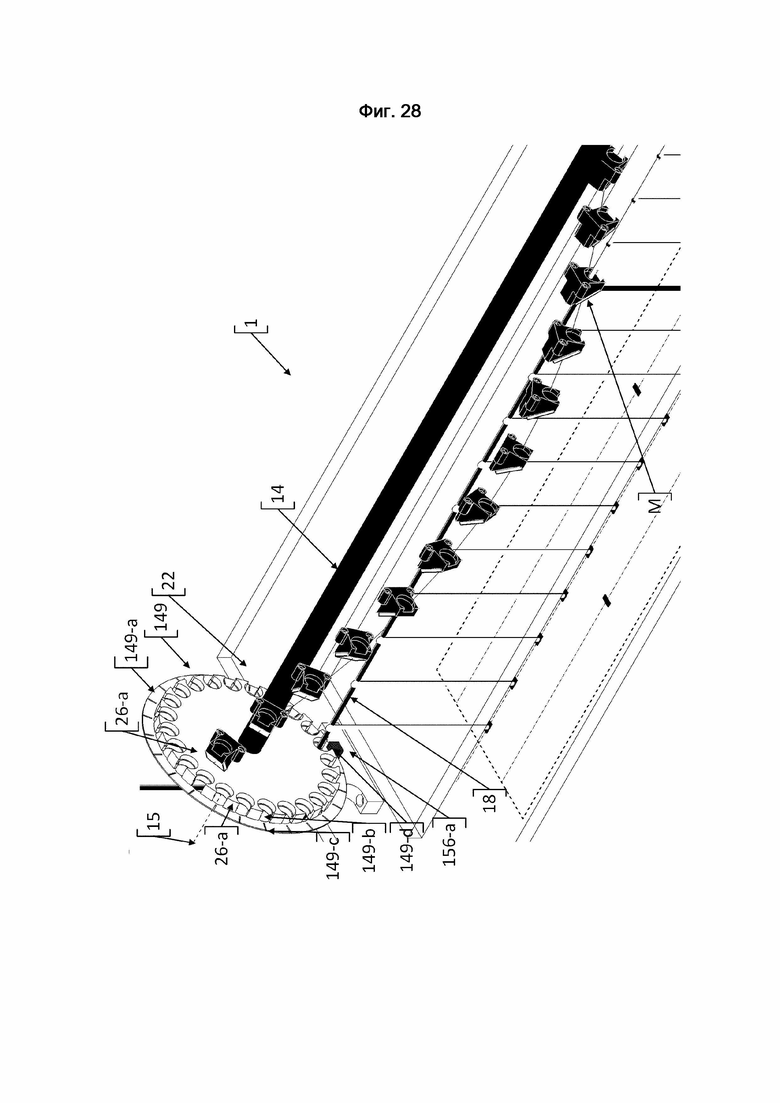
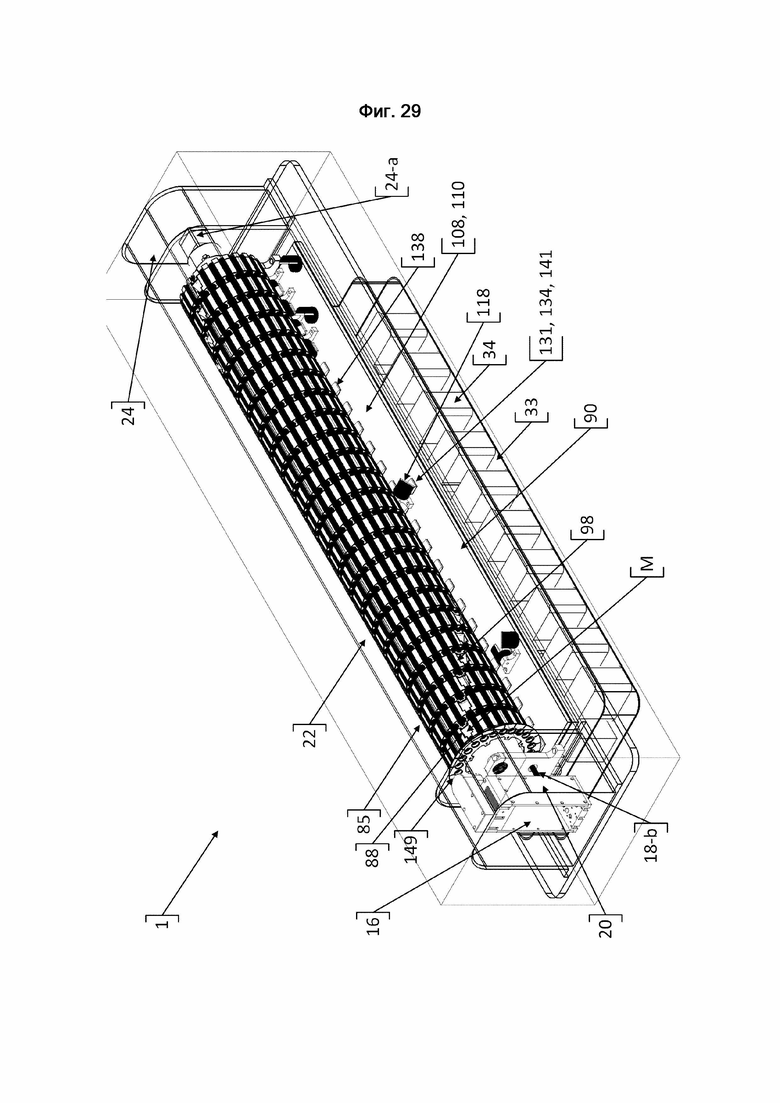
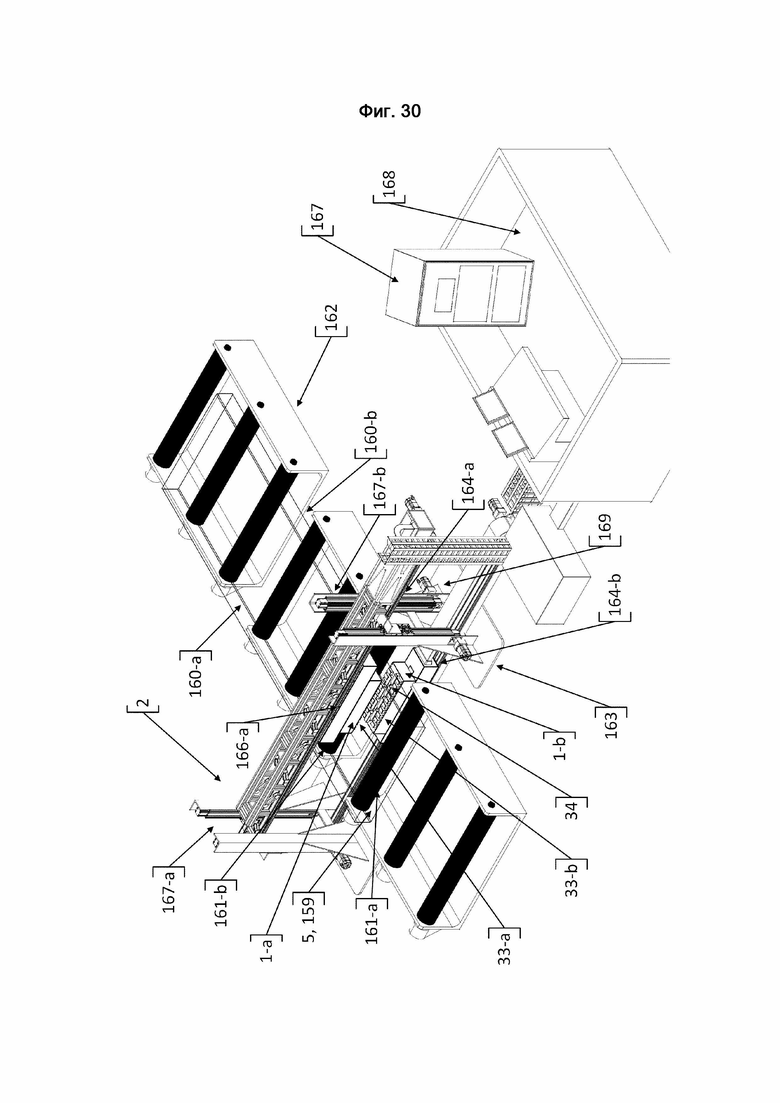
Использование: для ультразвукового неразрушающего контроля стальных слябов во время их непрерывной разливки на сталелитейном заводе. Сущность изобретения заключается в том, что ультразвуковой прибор неразрушающего контроля включает в себя: вращающийся вал; источник поступающего лазерного излучения, создающий поступающий лазерный луч; монолитный вращающийся оптический блок, оснащенный несколькими зеркалами, которые жестко связаны с ним и вращаются по перпендикулярным окружностям вокруг одного и того же вращающегося вала; приводной двигатель; и набор направленных электромагнитных акустических преобразователей. Технический результат: обеспечение возможности обнаруживать и квалифицировать поверхностные и подповерхностные несплошности металлических заготовок, имеющих любую ориентацию. 26 з.п. ф-лы, 30 ил.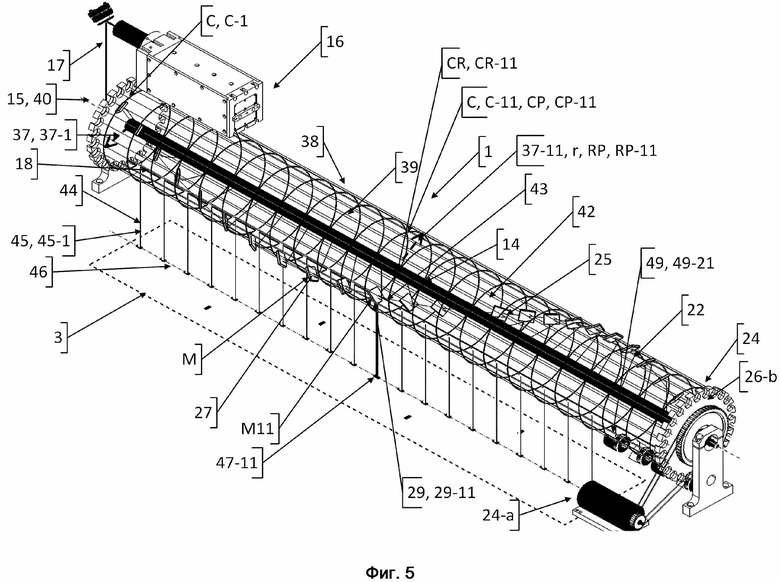
1. Ультразвуковой прибор неразрушающего контроля (1) гибридного типа электромагнитных акустических/лазерных преобразователей, состоящий из монолитного вращающегося оптического блока (22) маневренных лазерных излучателей, обеспечивающих многофокусное наведение лазерных лучей скачками для контроля металлургических объектов, для оснащения металлорежущего станка (2), осуществляющего контроль качества обработки металлов, в зоне управления (3) поверхности (4) металлической заготовки (5), и вызывающего механические колебания (8) в теле (9) металлической заготовки (5), и контролирующего генерируемые ультразвуковые индуцированные сигналы (11) для выявления поверхностных несплошностей (12) и подповерхностных несплошностей (13); устройство (1), включающее:
(a) вращающийся вал (14), способный вращаться вокруг оси вращения (15);
(b) источник поступающего лазерного излучения (16), оснащенный средствами оптического наведения (17), сконфигурированными для создания поступающего лазерного луча (18) с определенной мощностью поступающего лазерного излучения (pi), направленного вдоль оси поступающего луча (20), параллельной оси вращения (15), на определенном расстоянии (21) от оси вращения (15);
(c) вращающийся оптический блок (22), сконфигурированный для вращения вокруг оси вращения (15) и включающий блок отражателя (25),
i) состоящий из множества n (по меньшей мере двух) зеркал (M, M1, M2, ... ..., M11, M21, ..., M24), действующих в качестве оптического барьера (27),
ii) где каждое зеркало (m, m11) сконфигурировано таким образом, что в определенных поворотных положениях вращающегося оптического блока (22) зеркало (м) перехватывает ось поступающего пучка (20),
iii) каждое из зеркал (М) имеет точку отражения (29, 29-11), (i) расположенную на расстоянии отражения при вращении (32) перпендикулярно оси вращения (15), (ii) для отражения поступающего лазерного луча (18), воздействующего на это зеркало (М), (iii) с изменением углового направления луча (а), (iv) с эффективностью отражения (е) энергии поступающего лазерного луча (18), по существу равной ста процентам;
iv) геометрически сконфигурировано так, что (i) поступающий лазерный луч (18) последовательно воздействует на точку отражения (29, 29-11), связанную и принадлежащую одному из n удаленных зеркал (m, m11), (ii) каждая из n точек отражения (29, 29-11) n зеркал (m) проходит через окружность вращения (c, c-1, ..., c-11, ...), радиуса вращения (37, 37-1, ..., 37-11, ...), центрированного по центру вращения (cr, cr-1, ..., cr-11, ...), закрепленному на оси вращения (15), и (iii) n различных зеркал (m, m1, m2, ..., m11, m21, ..., m24), которые перенаправляют маневренным способом последовательное и прерывистое перемещение поступающего лазерного луча (18) в соответствии со сбором вторичных лучей (44), состоящих из пучка n удаленных друг от друга вторичных лазерных лучей (45, 45-1, ..., 45-11, ... , 45-24), возникающих в результате множества последовательных и прерывистых изменений углового направления пучка (a) поступающего лазерного луча (18) при отражении от последовательности n зеркал (m), находящихся на расстоянии и во вращении; и,
v) геометрически сконфигурированных таким образом, что n вторичных лазерных лучей (45) последовательно воздействуют на набор воздействий (46), состоящий из множества n удаленных точек воздействия (47, 47-1, ..., 47-11..., 47-21, ... , 47-24), расположенных (i) либо на плоскости воздействия (48), обращенной к вращающемуся оптическому блоку (22), расположенному на поверхности (4) зоны управления (3) и вблизи точки обнаружения (36) электромагнитного акустического преобразователя (34) ЭМАП-типа, либо (ii) на вспомогательном зеркале (49, 49-21, ... , 49-24);
(d) средства вращения (24) вращающегося оптического блока (22),
i) включающие приводной двигатель (24-a), соединенный с вращающимся валом (14), и
ii) сконфигурированные для приведения в действие вращающегося вала (14) вокруг оси вращения (15), с непрерывным направлением вращения (DR);
(e) блок сенсоров (33), состоящий из множества (по меньшей мере двух) электромагнитных акустических преобразователей (34) ЭМАП-типа, далее именуемых ЭМАП, каждый из которых является активным электромагнитным зондом (35):
(i) обращен к зоне управления (3) и по существу центрирован на точке обнаружения (36) зоны управления (3) и
(ii) сконфигурирован для генерирования сигнала a-скан (as) для определения положения объектов (12, 13) в зависимости от времени/расстояния, полученного из индуцированных сигналов (11) вблизи точки обнаружения (36);
это устройство (1), отличающееся тем, что оно представляет собой следующую комбинацию технических особенностей:
a) его вращающийся оптический блок (22), содержащий n зеркал (m), их механические соединительные части и n связанных с ними точек отражения (29, 29-11), во вращении,
(i) является монолитным, то есть состоит из механических и/или оптических частей, жестко механически соединенных вместе и находящихся в фиксированном, неизменяемом положении относительно друг друга, и
(ii) жестко закреплен средствами крепления (23) на одном и том же вращающемся валу (14), и
(iii) имеет жесткую геометрию, которая не деформируется во время его вращения;
b) n зеркал (m) блока отражателя (25) и их n соответствующих точек отражения (29, 29-11) находятся в фиксированном положении относительно одной и той же оси вращения (15);
c) расстояния вращающегося отражения (32) от n точек отражения (29, 29-11) всех зеркал (m), перпендикулярно относительно оси вращения (15), являются (i) постоянными и равными друг другу во время указанного вращения и (ii) по существу равны расстоянию луча (21);
d) каждая из n точек отражения (29, 29-11) n зеркал (m) проходит через окружность вращения (c, c-1, ..., c-11, ...), (i) центрированную на оси вращения (15) и (ii) удерживаемую перпендикулярно к оси вращения (15) во время указанного вращения;
e) каждая из n окружностей вращения (c) (i) представляет собой проекцию, параллельную плоскости проекции, параллельной оси вращения (15) и проходящей через ее центр вращения (cr, cr-1, ..., cr-11, ...), образованную из сегмента поперечного перемещения (st, st-1, ... , st- 11, ...), перпендикулярного оси вращения (15) и центрированного на его центре вращения (cr), и (ii) представляет собой проекцию, параллельную плоскости вращения, перпендикулярной оси вращения (15) и проходящей через его центр вращения (cr, cr-1, ... , cr-11, ...), образованную окружностью плоского проецируемого движения (cp, cp-1, ..., cp-11, ...), совпадающей с окружностью вращения (c), и имеющую радиус проецируемого вращения (rp, rp-1, ..., rp-11, ...), равный расстоянию между лучами (21) во время указанного вращения;
f) каждая точка отражения (29) зеркала (m) расположена неподвижно относительно одной и той же вращающейся цилиндрической поверхности отражения (38) виртуального цилиндра отражения (39),
(i) имеющего постоянное круговое сечение,
(ii) вращающегося вокруг оси вращения (15),
(iii) радиус цилиндра отражения (41) которого постоянен и по существу равен i) радиусам вращения (37, 37-1, ..., 37-11, ... ) каждой из n окружностей вращения (c, c-1, ..., c-11, ...) и ii) расстоянию между лучами (21),
(iv) так что поперечное сечение виртуального цилиндра отражения (39) при вращении и его вращающейся цилиндрической поверхности отражения (38) постоянно является круглым,
(v) но продольное положение которого фиксировано относительно вращающегося вала (14), то есть без какого-либо продольного перемещения относительно оси вращения (15);
g) точки отражения (29) зеркал (m) расположены на вращающейся спиральной точечной линии (43)
(i) с круговой спиральной намоткой, радиус которой равен расстоянию между лучами (21),
(ii) и с круговой цилиндрической резьбой,
(iii) фиксированной вместе со своими точками на цилиндрической отражающей поверхности (38) и вращающейся вместе с ней, но
(iv) продольное положение которой зафиксировано относительно вращающегося вала (14), то есть без какого-либо продольного смещения относительно оси вращения (15);
h) поступающий лазерный луч (18) во время вращения располагается вдоль последовательных прямолинейных линий генерации отражения (42) вращающейся цилиндрической отражающей поверхности (38),
(i) каждая из которых прикреплена к точке отражения (29) зеркала (m),
(ii) движущейся во вращении вместе с виртуальным цилиндром отражения (39),
(iii) но без продольного перемещения относительно оси вращения (15).
2. Устройство (1) по п.1, отличающееся тем, что в цилиндрической системе координат (CCS), полярная цилиндрическая ось (52) которой совпадает с осью вращения (15), а плоскость отсчета (53) перпендикулярна оси вращения (15) и пересекает ее в определенной точке отсчета (o),
a) угловые полярные расстояния (dθ) между угловыми координатами (θ) двух последовательных точек отражения (29) спиральной пунктирной линии (43), соединяющей все точки отражения (29) и замкнутой по окружности, положительны и постоянны;
b) цилиндрические расстояния (r) точек отражения (29) постоянны и все равны расстоянию луча (21); и
c) круговой цилиндрический шаг винта (57) спиральной пунктирной линии (43) положителен и постоянен.
3. Устройство (1) по п.1, отличающееся тем, что постоянные угловые полярные расстояния (dθ) приблизительно равны 360°, деленные на количество зеркал (n), dθ = 360°/N; так что в цилиндрической системе координат (CCS)
a) общая длина отражения (Z), состоящая из разницы между высотами (Z1, ZN) двух крайних зеркал (M1, MN) вращающегося оптического блока (22), которые находятся наиболее далеко друг от друга, по существу, равна цилиндрическому шагу винта (57) спиральной пунктирной линии (43); и
b) блок отражателя (25) обеспечивает угловой спектр угловых координат (θ), охватывающий, по существу, 360°.
4. Устройство (1) по п.1, отличающееся тем, что, если рассматривать для каждого зеркала (m, m11) его радиальный сегмент (63), соединяющий точку отражения (29) с точкой проекции (64) на оси вращения (15), для каждого зеркала (m) и относительно его плоскости ориентации (65), проходящей через точку отражения (29, 29-11) и перпендикулярной радиальному сегменту (63):
(a) радиальный сегмент (63) имеет постоянную радиальную длину (62), равную расстоянию между лучами (21);
(b) угол поворота (ar) относительно оси вращения (15) равен нулю при 0°;
(c) угол поворота (AP) относительно оси вращения (15) идентичен для всех зеркал (m); и
(d) продольное положение точки проекции (64) каждого радиального сегмента (63) фиксировано вдоль оси вращения (15) и относительно вращающегося вала (14);
таким образом:
a) вторичные лазерные лучи (45) (i) все параллельны и расположены в одной плоскости вторичных лучей (68), проходящей через ось вращения (15) и перпендикулярной плоскости воздействия (48), и (ii) расположены в виде плоской матрицы вторичных лучей (69); и
b) все точки воздействия (47) зоны управления (3) центрированы по прямолинейной пунктирной линии воздействия (70) плоскости воздействия (48) и расположены друг от друга на определенном расстоянии воздействия (71) между двумя соседними точками воздействия (47).
5. Устройство (1) по п.4, отличающееся тем, что
(a) угол поворота (AP) относительно оси вращения (15) каждого зеркала (m) фиксировано равен 45°, а также
(b) зона управления (3) и плоскость воздействия (48) параллельны оси вращения (15), так что:
a) каждый из вторичных лазерных лучей (45) перпендикулярен плоскости воздействия (48); и
b) вторичная длина (72) каждого из вторичных лазерных лучей (45) и, следовательно, вертикальный размер (73) вращающегося оптического блока (22) сведены к минимуму.
6. Устройство (1) по п.1, отличающееся тем, что оно оснащено по меньшей мере одним цифровым процессором b-скан (BSP), подключенным к электромагнитным акустическим преобразователям (34) ЭМАП-типа, сконфигурированным для:
a) обработки и объединения информации от обнаруженных ими сигналов a-скан (AS), и,
b) создающий двумерную цифровую развертку в-скан (75) участка металлической заготовки (5)
(i) в плоскости в-скан (SAP), по существу совпадающей с вертикальной плоскостью вторичных лучей (68), перпендикулярной плоскости воздействия (48) в зоне управления (3) металлической заготовки (5),
(ii) по существу вдоль линии обнаружения (77), соединяющей пунктирную линию (70) воздействия, и
(iii) представляющей цифровые позиции (78) относительно глубины (79) разрывов (12, 13) в плоскости в-сканирования (SAP).
7. Устройство (1) по п.1, отличающееся тем, что
a) вращающийся оптический блок (22) состоит из механической сборки геометрически идентичных опорных секций (80), которые расположены бок о бок вдоль оси вращения (15);
b) опорные секции (80) жестко закреплены между собой;
c) на каждой опорной секции (80) закреплено зеркало (m); и
d) в цилиндрической системе координат (ccs), полярная цилиндрическая ось (52) которой совпадает с осью вращения (15), две соседние опорные секции (80), оснащенные своими зеркалами (m), поворачиваются относительно друг друга перпендикулярно оси вращения (15) на одинаковое угловое полярное расстояние (dθ) между двумя последовательными точками отражения (29), принадлежащими их соответствующим зеркалам (m) спиральной пунктирной линии (43).
8. Устройство (1) по п.7, отличающееся тем, что
a) опорные секции (80) имеют форму удлиненной опорной балки (81), ось опоры (82) которой пересекает ось вращения (15);
b) каждая опорная балка (81) крепится к вращающемуся валу (14) с помощью крепежных средств (83);
c) зеркало (m) закреплено на опорном конце (84) каждой опорной балки (81).
9. Устройство (1) по п.7, отличающееся тем, что
a) каждая из опорных секций (80) имеет, по существу, форму опорного диска (85) плоской цилиндрической формы;
b) каждый опорный диск (85) имеет крепежное отверстие (86), расположенное перпендикулярно и по центру, диаметр отверстия (87) которого практически равен диаметру вращающегося вала (14);
c) опорные диски (85) устанавливаются друг за другом на вращающийся вал (14), вдоль него и в плоскости укладки, перпендикулярной оси вращения (15), через их крепежное отверстие (86); и
d) каждый опорный диск (85) имеет опорный корпус (88), расположенный на периферии диска (89), на котором закреплено его зеркало (m).
10. Устройство (1) по п.7, отличающееся тем, что
a) вращающийся оптический блок (22) оснащен узлом жесткости (90), состоящим из множества жестких стержней (91), (i) ось жесткости (92) которых параллельна оси вращения (15), (ii) закреплена относительно вращающегося вала (14) и закреплена относительно друг друга; и
b) каждый жесткий стержень (91) проходит по меньшей мере через одну опорную секцию (80), к которой он жестко прикреплен путем размещения по ячейкам (93) в углублении для жесткости (94) этой опорной секции (80).
11. Устройство (1) по п.10, отличающееся тем, что
a) жесткие стержни (91) расположены, по существу, вдоль прямолинейных линий генерации жесткости (95) одного и того же виртуального цилиндра жесткости (96) при вращении и
b) ось цилиндра жесткости (97) виртуального цилиндра жесткости (96) совпадает с осью вращения (15).
12. Устройство (1) по п.11, отличающееся тем, что
a) опорные секции (80) вращающегося оптического блока (22) имеют форму опорных дисков (85), геометрически идентичных и имеющих плоскую цилиндрическую форму, расположенных бок о бок, перпендикулярно и по центру относительно оси вращения (15);
b) каждый опорный диск (85) имеет опорный корпус (88), расположенный на периферии диска (89), на котором закреплено его зеркало (m);
c) узел жесткости (90) образован из жестких стержней (91), каждый из которых состоит из прямолинейной жесткой полой трубки (98),
(i) внутри которой имеется пустой продольный канал (99, 99-a), пересекающий ее из стороны в сторону в соответствии с осью жесткости (92), и
(ii) продольный канал (99) которого расположен по существу вдоль прямолинейной линии генерации жесткости (95) виртуального цилиндра жесткости (96);
d) расстояние каждого продольного канала (99) относительно оси вращения (15) неизменно и, по существу, равно радиусу цилиндра отражения (41) и расстоянию между лучами (21), так что виртуальный цилиндр жесткости (96) по существу совпадает с виртуальным вращающимся цилиндром отражения (39);
e) жесткие полые трубки (98; 98-a) устанавливаются в последовательные дисковые выемки (100), предусмотренные на периферии диска определенных опорных дисков (85).
13. Устройство (1) по п.12, отличающееся тем, что
(a) его узел жесткости (90) включает узел жесткости восходящего потока (90-a), состоящий из жестких полых трубок восходящего потока (98-a), которые имеют разные длины трубок (101) и геометрически сконфигурированы так, что каждая из них тянется в продольном направлении между
(i) с одной стороны концом восходящего потока трубки восходящего потока (102-a), i) расположенным вблизи одной и той же боковой поверхности (103-a) первого опорного диска (104-a) вращающегося оптического блока (22), ii) через который перпендикулярно проникает поступающий лазерный луч (18),
(ii) и с другой стороны концом трубки (105-a), расположенным напротив зеркала (m) конкретного изменяемого промежуточного опорного диска (106), различного для каждой жесткой полой трубки восходящего потока (98-a); так что, когда приводной двигатель (24-a) и поступающий лазерный источник (16) активированы:
a) оси жесткости (92) жестких полых трубок восходящего потока (98-a) вращаются вдоль прямолинейных линий генерации отражения (42) виртуального цилиндра отражения (39) при вращении;
b) поступающий лазерный луч (18)
(i) последовательно проникает через продольный канал (99) одной из последовательных жестких полых трубок восходящего потока (98-a)
(ii) и последовательно воздействует на точку отражения (29) зеркала (M) определенного промежуточного опорного диска (106), обращенного к нему;
c) таким образом, чтобы трубчатый узел жесткости восходящего потока (90-a) одновременно обеспечивал
(i) жесткость и защиту от продольных вибраций вращающегося оптического блока (22) и
(ii) защиту путем инкапсуляции поступающего лазерного луча (18) во время вращения вращающегося оптического блока (22).
14. Устройство (1) по п.13, отличающееся тем, что
(a) его узел жесткости (90) дополнительно включает узел жесткости нисходящего потока (90-b), состоящий из жестких полых трубок нисходящего потока (98-b), которые имеют различную длину трубок (101) и геометрически сконфигурированы таким образом, что каждая из них тянется в продольном направлении между
(i) с одной стороны концом восходящего потока трубки нисходящего потока (102-b), расположенным за зеркалом (m) определенного промежуточного опорного диска (106), различного для каждой жесткой полой трубки нисходящего потока (98-b), и
(ii) с другой стороны концом трубки нисходящего потока (105-b), расположенным вблизи той же боковой поверхности нисходящего потока (103-b) последнего опорного диска нисходящего потока (104-b) вращающегося оптического блока (22);
(b) узел жесткости трубки восходящего потока (90-a) и узел жесткости трубки нисходящего потока (90-b)
(i) имеют схожую топологию, дополняют друг друга и
(ii) по существу являются изображением друг друга после зеркального отражения в сочетании с осевым поворотом на 180°; таким образом, что:
a) сочетание узла жесткости трубки восходящего потока (90-a) и узла жесткости трубки нисходящего потока (90-b) (i) обеспечивает жесткость и защиту от продольных колебаний вращающегося оптического блока (22) по всей его длине во время вращения и (ii) служит в качестве направляющей для легкой сборки и углового перемещения на заданную длину опорных дисков (85); и
b) жесткие полые трубки нисходящего потока (98-b) никогда не подвергаются воздействию поступающего лазерного луча (18).
15. Устройство (1) по п.14, отличающееся тем, что
a) оно оснащено фокусирующим блоком (107), состоящим из множества фокусирующих линз (108), в фиксированном положении относительно оси вращения (15) и плоскости воздействия (48); и
b) эти фокусирующие линзы (108) расположены между вращающимся оптическим блоком (22) и плоскостью воздействия (48), а также их оптическая ось (109) перпендикулярна плоскости воздействия (48).
16. Устройство (1) по п.15, отличающееся тем, что его фокусирующий блок (107) оснащен цилиндрическими фокусирующими линзами (110) (цилиндрического или полуцилиндрического типа), имеющими ось оптического цилиндра (111), по существу параллельную плоскости воздействия (48).
17. Устройство (1) по п.16, отличающееся тем, что его фокусирующий блок (107) состоит из цилиндрических фокусирующих линз (110):
a) каждая из которых сконфигурирована для фокусировки вторичных лазерных лучей (45), проходящих через них, (i) в соответствии с узким прямоугольным пятном лазерного воздействия (112), (ii) то есть длина лазерного пятна (113) по меньшей мере в два раза больше ширины лазерного пятна (114), и,
b) таким образом, определяя ось прямоугольного пятна (115), ориентированную в соответствии с длиной лазерного пятна (113).
18. Устройство (1) по п.1, отличающееся тем, что
a) оно включает в себя вторичную опору (116), находящуюся в фиксированном положении относительно оси вращения (15) и плоскости воздействия (48);
b) оно включает в себя вспомогательный отражатель (117, 117-a), состоящий по меньшей мере из двух (q) вспомогательных зеркал (49, 118, 118-a-1, 118-a-2, 118-a-3),
(i) каждое из которых находится в фиксированном положении между ними и относительно вторичной опоры (116), и
(ii) геометрически сконфигурирован для отклонения при последовательном отражении вспомогательных лазерных лучей (119, 119-a-1, 119-a-2, 119-a-3, 119-a-4) из сбора вспомогательных лучей (120, 120-a, 120-b, 120-c, 120-d), из которых первый отклоненный луч (119-a-1) состоит из одного из вторичных лазерных лучей (45, 45-21), излучаемых вращающимся оптическим блоком (22);
(iii) которые последовательно воздействуют одним из вспомогательных лазерных лучей (119, 119-a-1, 119-a-2, 119-a-3) на вспомогательную точку отражения (121, 121-a-1, 121-a-2, 121-a-3) этого вспомогательного зеркала (118, 118-a-1, 118-a-2, 118-a-3), чтобы образовать новый отклоненный вспомогательный лазерный луч из сбора вспомогательных лучей (120, 120-a, 120-b, 120-c, 120-d), каждый раз с изменением углового направления луча (a) этого воздействующего вспомогательного лазерного луча (119, 119-a-1, 119-a-2, 119-a-3);
c) вспомогательное зеркало восходящего потока (122, 118-a-1) вспомогательного блока отражателя (117, 117-a) расположено на пути вторичного лазерного луча (45, 45-21) и геометрически сконфигурировано
(i) для воздействия этого вторичного лазерного луча (45, 45-21) на его вспомогательную точку отражения (121, 121-a-1)
(ii) и отражения его в первый отклоненный вспомогательный лазерный луч (119, 119-a-2), принадлежащий сбору вспомогательных лучей (120, 120-a);
d) вспомогательное зеркало нисходящего потока (123, 118-a-3) вспомогательного блока отражателя (117, 117-a) имеет геометрическую конфигурацию, (i) направленную по существу как
i) на последний вспомогательный лазерный луч (119, 119-a-3), принадлежащий сбору вспомогательных лучей (120, 120-a), так и
ii) на зону управления (3) и (ii) отклоняющую этот последний вспомогательный лазерный луч (119, 119-a-3) в соответствии с окончательным отклоненным вторичным лазерным лучом (124, 119-a4, 124-a), который воздействует, по нисходящему потоку сбора вспомогательных лучей (120, 120-a), в отклоненную точку воздействия (125, 125-a) плоскости воздействия (48) зоны управления (3), прилегающей к точке обнаружения (36) электромагнитных акустических преобразователей (34) ЭМАП-типа.
19. Устройство (1) по п.18, отличающееся тем, что
a) оно включает в себя блок вспомогательного отражателя (126, 126-1), состоящий по меньшей мере из двух вспомогательных блоков отражателя (117, 117-a, 117-c),
b) указанные по меньшей мере два вспомогательных блока отражателя (117, 117-a, 117-c) геометрически сконфигурированы таким образом, что их по меньшей мере два отклоненных вторичных лазерных луча (124, 124-a, 124-c)
(i) параллельны и расположены в одной и той же плоскости отклоненных вторичных лучей (127, 127-1),
(ii) по существу перпендикулярны плоскости воздействия (48),
(iii) расположены в соответствии с отклоненной плоской матрицей вторичных пучков (128, 128-1) и
(iv) воздействуют на набор отклоненных воздействий (129, 129-1), состоящий по меньшей мере из двух удаленных друг от друга точек отклоненного воздействия (125, 125-a, 125-c), расположенных на прямолинейной пунктирной линии отклоненных воздействий (130, 130-1) плоскости воздействия (48) зоны управления (3).
20. Устройство (1) по п.19, отличающееся тем, что
a) оно оснащено фокусирующим блоком (107), состоящим из фокусирующих линз (108), неподвижно расположенных относительно оси вращения (15) и плоскости воздействия (48); и
b) фокусирующие линзы (108) геометрически сконфигурированы в две группы в соответствии с расположением их оптических осей (109), которые включают:
(i) первая группа, состоящая из вторичных фокусирующих линз (131), i) чья вторичная оптическая ось (132) совпадает с вторичной осью (133) вторичного лазерного луча (45), исходящего из точки отражения (29) вращающегося зеркала (m), и ii) в этом случае она закреплена напротив оси вращения (15), между виртуальным цилиндром отражения (39) при вращении и точками воздействия (47) этого вторичного лазерного луча (45), и iii) сконфигурирована для фокусировки этого вторичного лазерного луча (45) на его точке воздействия (47) пунктирной линии воздействия (70), и,
(ii) вторая группа, состоящая из вспомогательных фокусирующих линз (134), i) чья вспомогательная оптическая ось (135) совпадает со вспомогательной осью (136) конечного отклоненного вторичного лазерного луча (124), выходящего из конечной вспомогательной точки отражения (121, 121-b-3) нисходящего вспомогательного зеркала (123, 118-b-3), и ii) в этом случае она фиксирована относительно оси вращения (15), между виртуальным цилиндром отражения (39) при вращении и отклоненной точкой воздействия (125, 125-b) отклоненного вторичного лазерного луча (124, 124-a), и iii) сконфигурирована для фокусировки этого отклоненного вторичного лазерного луча (124, 124-b) на его отклоненной точке воздействия (125, 125-b) отклоненной пунктирной линии воздействия (130, 130-2).
21. Устройство (1) по п.20, отличающееся тем, что
a) его фокусирующий блок (107) состоит из цилиндрических фокусирующих линз (110),
(i) закрепленных относительно вторичной опоры (116),
(ii) имеющих ось оптического цилиндра (111), по существу параллельную плоскости воздействия (48),
(iii) каждая из которых настроена на фокусировку вторичного лазерного луча (45) или отклоненного вторичного лазерного луча (124) на прямоугольное пятно лазерного воздействия (112) на плоскости воздействия (48), вдоль оси прямоугольного пятна (115);
b) эти цилиндрические фокусирующие линзы (110) геометрически сконфигурированы таким образом, что фокусирующий блок (107) разделен на две группы:
(i) с одной стороны, продольный фокусирующий сбор (137), состоящий из продольных цилиндрических фокусирующих линз (138), то есть чья ось оптического цилиндра (111) является по существу продольной по отношению к оси вращения (15), которые сконфигурированы для фокусировки проходящего через них светового пучка на продольном прямоугольном пятне лазерного воздействия (139), и,
(ii) с другой стороны, поперечный фокусирующий сбор (140), состоящий из поперечных цилиндрических фокусирующих линз (141), то есть чья ось оптического цилиндра (111) является по существу поперечной по отношению к оси вращения (15), которые сконфигурированы для фокусировки светового пучка, проходящего через них, на поперечное прямоугольное пятно лазерного воздействия (142).
22. Устройство (1) по п.21, отличающееся тем, что
a) оно содержит:
(i) плоскую матрицу вторичных лучей (69), состоящую из вторичных лазерных лучей (45, 45-11), i) излучаемых вращающимся оптическим блоком (22), ii) которые воздействуют на точки воздействия (47), принадлежащие пунктирной линии воздействия (70), и
(ii) по меньшей мере одну отклоненную плоскую матрицу вторичных лучей (128, 128-1, 128-2), состоящую из отраженных вторичных лазерных лучей (124, 124-a-21, 124-b-22, 124-c-23, 124-d-24), i) вспомогательного отражателя (126, 126-1, 126-2), ii) которые воздействуют на отклоненные точки воздействия (125, 125-a-21, 125-b-22, 125-c-23, 125-d-24), принадлежащие по меньшей мере одной отклоненной пунктирной линии воздействия (130, 130- 1, 130-2);
b) продольные цилиндрические фокусирующие линзы (138) и поперечные цилиндрические фокусирующие линзы (141) расположены комплементарно и исключительно в двух группах, так что: (i) первая группа (110-1) фокусирует плоскую матрицу вторичных лучей (69) на его точечной линии воздействия (70) i) только в соответствии с продольными прямоугольными точками лазерного воздействия (139) или ii) только в соответствии с поперечными прямоугольными точками лазерного воздействия (142); и, (ii) альтернативно и исключительно от предыдущей, вторая группа (110-2) фокусирует отклоненную плоскую матрицу вторичных пучков (128, 128-1, 128-2) на отклоненной точечной линии воздействия (130, 130-1, 130-2) i) только в соответствии с поперечными прямоугольными точками лазерного воздействия (142) или ii) только в соответствии с продольными прямоугольными точками лазерного воздействия (139).
23. Устройство (1) по п.1, отличающееся тем, что
a) его блок сенсоров (33) состоит из направленных электромагнитных акустических преобразователей (143), представляющих привилегированную направленную ориентацию зондирования (144) индуцированных сигналов (11), генерируемых при взаимодействии механических вибраций (8) с поверхностными несплошностями (12) и подповерхностными несплошностями (13);
b) его блок сенсоров (33) сконфигурирован с целью разделения на две группы, (i) с одной стороны, это сбор продольных сенсоров (145), состоящих из продольных электромагнитных акустических преобразователей (146, 146-t, 146-d), то есть с привилегированной ориентацией сенсоров (144) в продольном направлении относительно оси вращения (15), и, (ii) с другой стороны, сбор поперечных сенсоров (147), состоящий из поперечных электромагнитных акустических преобразователей (148, 148-t, 148-d), то есть с привилегированной направленной ориентацией сенсоров (144) в поперечном направлении относительно оси вращения (15);
c) поперечные прямоугольные точки лазерного воздействия (142, 15-a-21, 125-b-22, 125-c-23, 125-d-24) (в количестве) преимущественно расположены между двумя продольными электромагнитными акустическими преобразователями (146); и
d) продольные прямоугольные точки лазерного воздействия (139, 47-11) (в количестве) преимущественно расположены вблизи и над или под поперечными электромагнитными акустическими преобразователями (148) относительно ориентации позиционирования по высоте, взятой перпендикулярно оси вращения (15).
24. Устройство (1) по п.20, отличающееся тем, что его вращающийся оптический блок (22) геометрически сконфигурирован таким образом, что:
a) он включает в себя: (i) плоскую матрицу вторичных лучей (69), i) состоящую из вторичных лазерных лучей (45, 45-11), ii) которые воздействуют на точки воздействия (47) главной пунктирной линии воздействия (70), и (ii) две отклоненные плоские матрицы вторичных лучей (128, 128-1, 128-2), i) состоящие из двух групп отклоненных вторичных лазерных лучей (124-a, 124-c) и (124-b, 124-d), ii) исходящих из двух вспомогательных блоков отражателей (126, 126-1, 126-2), iii) которые воздействуют на две удаленные вспомогательные отклоненные пунктирные линии воздействия (130, 130-1, 130- 2); и
b) основная пунктирная линия воздействия (70) и две вспомогательные отклоненные пунктирные линии воздействия (130, 130-1, 130-2) являются всеми тремя параллельными осями вращения (15), отдаленными друг от друга;
c) две отклоненные пунктирные линии воздействия (130, 130-1, 130-2) расположены по обе стороны, то есть выше и ниже основной пунктирной линии воздействия (70), с учетом ориентации по высоте, взятой перпендикулярно оси вращения (15).
25. Устройство (1) по п.24, отличающееся тем, что его вращающийся оптический блок (22) сконфигурирован геометрически таким образом, что:
a) его основная пунктирная линия воздействия (70) образована продольными прямоугольными точками лазерного воздействия (139); и
b) его две вспомогательные пунктирные линии отклоненных воздействий (130, 130-1, 130-2) образованы из поперечных прямоугольных точек лазерного воздействия (142, 125-a-21, 125-b-22, 125-c-23, 125-d-24).
26. Устройство (1) по пп.23 и 25, отличающееся тем, что его вращающийся оптический блок (22) сконфигурирован геометрически таким образом, что:
a) его продольные электромагнитные акустические преобразователи (146, 146-t, 146-d) преимущественно (в количестве) (i) выстроены по центру обеих сторон и поочередно напротив основной пунктирной линии воздействия (70) и (ii) расположены в продольном направлении рядом с поперечным прямоугольным пятном лазерного воздействия (142, 125-a-21, 125-b-22, 125-c-23, 125-d-24) одной из двух отклоненных пунктирных линий воздействия (130, 130-1, 130-2); и
b) его поперечные электромагнитные акустические преобразователи (148, 148-t, 148-d) преимущественно (по количеству) расположены и выстроены попеременно выше и/или ниже продольных электромагнитных акустических преобразователей (146, 146-t, 146-d), со ссылкой на ориентацию позиционирования по высоте, взятую в направлении, перпендикулярном оси вращения (15).
27. Устройство (1) по п.1, отличающееся тем, что дополнительно содержит:
(a) средства контроля углового положения (149) одного вращающегося вала (14) и, следовательно, монолитного вращающегося оптического блока (22) во вращении относительно оси вращения (15), (i) соединенные с одним вращающимся валом (14);
(b) средства контроля и синхронизации лазерных импульсов (150), (i) электрически связанные с поступающим лазерным источником (16) и (ii) сконфигурированные для контроля и/или синхронизации генерации лазерных импульсов поступающим лазерным источником (16);
(c) средства синхронизации вращения двигателя (151), (i) электрически соединенные с приводным двигателем (24-a);
(d) процессор синхронизированных лазерных импульсов и времени вращения (152),
(i) электрически связанный со средством контроля углового положения (149) вращающегося вала (14) и
(ii) электрически связанный со средством синхронизации вращения двигателя (151), для непрерывного получения углового положения вращающегося вала (14);
это устройство (1) характеризуется тем, что процессор синхронизированных лазерных импульсов и времени вращения (152) сконфигурирован:
a) либо в режиме контроля двигателя (153),
(i) для электрического управления средством синхронизации вращения двигателя (151),
(ii) в зависимости от синхронизации лазерных импульсов, генерируемых источником поступающего лазерного излучения (16),
(iii) для последовательного позиционирования осевого углового положения вращающегося оптического блока (22),
(iv) таким образом, что число импульсов воздействия на зеркало (NIM) импульсов поступающего лазерного луча (18), воздействующих на каждое из вращающихся зеркал (M, M1, ... , M20), вблизи своей точки отражения (29) от вращающейся спиральной пунктирной линии (43), является постоянным (например, NIM =2);
b) либо в режиме контроля импульсов (154),
(i) для электрического управления средством контроля и синхронизации лазерных импульсов (150),
(ii) в зависимости от времени осевого углового положения вращающегося оптического блока (22), непрерывно получаемого от средства контроля углового положения (149), для последовательной адаптации времени импульсов поступающего лазерного луча (18),
(iii) таким образом, что число импульсов воздействия на зеркало (NIM) импульсов поступающего лазерного луча (18),
(vi) воздействующих на каждое из вращающихся зеркал (M, M1, ... , M20), вблизи своей точки отражения (29) от вращающейся спиральной пунктирной линии (43), является постоянным (например, NIM =2).
| US 5948291 A, 07.09.1999 | |||
| US 4838631 A, 13.06.1989 | |||
| US 2004056009 A1, 25.03.2004 | |||
| US 5698787 A, 16.12.1997 | |||
| ЛАЗЕРНЫЙ УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОП | 2010 |
|
RU2544257C2 |

