Изобретение относится к области медицинской рентгеновской техники и может быть использовано при проведении рентгенографических исследований.
Известны различные способы получения рентгенографического изображения плоского поля, т.е. изображения, полученного в отсутствии объекта исследования, но при тех же условиях, что и изображение объекта исследования.
В частности, известен способ получения рентгенографического изображения плоского поля, заключающийся в предварительном получении набора изображений плоского поля для всех возможных условий съемки и сохранении его в памяти в виде таблицы поиска (см. US 2022/0280128 А1, 08.09.2022, [0056] [1]).
Недостатком такого способа является необходимость в использовании значительного объема памяти для хранения предварительно полученных изображений.
Частично решает эту проблему предварительное получение набора изображений плоского поля, формирование из них разреженной таблицы поиска и последующее получение изображения плоского поля для требуемых условий съемки путем интерполяции. Однако продолжает оставаться актуальным необходимость в использовании достаточно большого объема памяти для хранения изображений, а также возникает необходимость в периодическом обновлении хранимого набора из-за изменений характеристик рентгеновского устройства.
Известный из [1] способ принят в качестве ближайшего аналога заявленного способа.
Техническая проблема, решаемая заявленным изобретением, состоит в создании способа получения изображения плоского поля, позволяющего восстановить искомое изображение с помощью компактного массива сохраненных переменных и учесть при этом изменение характеристик рентгеновского устройства за прошедшее с предыдущей калибровки время.
При этом достигается технический результат, заключающийся в уменьшении объема памяти, занимаемого калибровочными данными, и увеличении интервала между калибровками рентгеновского устройства.
Техническая проблема решается, а указанный технический результат достигается в результате создания способа получения рентгенографического изображения плоского поля, включающего предварительные получение массива исходных изображений плоского поля, каждое из которых соответствует заданному набору значений параметров получения, сжатие каждого из полученных исходных изображений плоского поля с получением в результате массива переменных с меньшей размерностью, чем у соответствующего исходного изображения плоского поля, аппроксимацию зависимости переменных каждого из полученных массивов от значений параметров получения соответствующих исходных изображений плоского поля, сохранение параметров аппроксимирующей зависимости, сохранение значения первого корректирующего коэффициента K1=1 и последующие получение изображения объекта исследования, получение изображения плоского поля, соответствующего значениям параметров получения изображения объекта исследования, получение текущего значения первого корректирующего коэффициента K1 и получение первого скорректированного изображения плоского поля путем умножения упомянутого изображения плоского поля на K1, получение изображения маски фона с использованием упомянутого изображения объекта исследования, получение значения второго корректирующего коэффициента K2 с использованием упомянутого изображения объекта исследования, упомянутого изображения маски фона и упомянутого первого скорректированного изображения плоского поля, получение обновленного значения K1 с использованием, по меньшей мере, последнего ранее сохраненного значения коэффициента K1 и значения второго корректирующего коэффициента K2 и сохранение обновленного значения K1, получение окончательного скорректированного изображения плоского поля путем умножения упомянутого первого скорректированного изображения плоского поля на K2.
В частном варианте реализации сжатие каждого из полученных исходных изображений плоского поля осуществляют с использованием биннинга.
В другом частном варианте реализации сжатие каждого из полученных исходных или предварительно сжатых с помощью биннинга изображений плоского поля осуществляют с использованием представления в виде суммы степенных или гармонических слагаемых.
В еще одном частном варианте реализации аппроксимацию зависимости переменных каждого из полученных массивов от параметров получения соответствующих исходных изображений плоского поля осуществляют с использованием непрерывной или кусочно-непрерывной функции.
В еще одном частном варианте реализации получение изображения плоского поля, соответствующего параметрам получения изображения объекта исследования, осуществляют путем подстановки в полученную ранее аппроксимирующую зависимость значений параметров получения изображения объекта исследования и последующей декомпрессии.
В еще одном частном варианте реализации получение изображения маски фона осуществляют с использованием одной из операций, выбранной из группы, включающей в себя пороговую обработку изображения, выделение границ на изображении и использование предварительно обученной глубокой нейронной сети.
В еще одном частном варианте реализации значение K2 принимают равным 1, если область, относящаяся к фону, на упомянутом изображении плоского поля имеет площадь, меньшую по величине заданного порогового значения, или сигнал в ней не попадает в заданный диапазон яркостей, в результате чего упомянутая область становится невалидной, и значение K2 принимают равным эффективному значению отношения яркости в области, относящейся к фону, выделенной на упомянутом изображении плоского поля, к яркости в области, относящейся к фону, на упомянутом скорректированном изображении плоского поля, если область, относящаяся к фону, на упомянутом изображении плоского поля валидна.
В предпочтительном варианте реализации определение эффективного значения отношения упомянутых яркостей осуществляют с использованием одной из операций, выбранной из группы, включающей в себя вычисление медианного значения затухания, вычисление среднего значения затухания и итерационное вычисление среднего затухания путем исключения выбросов.
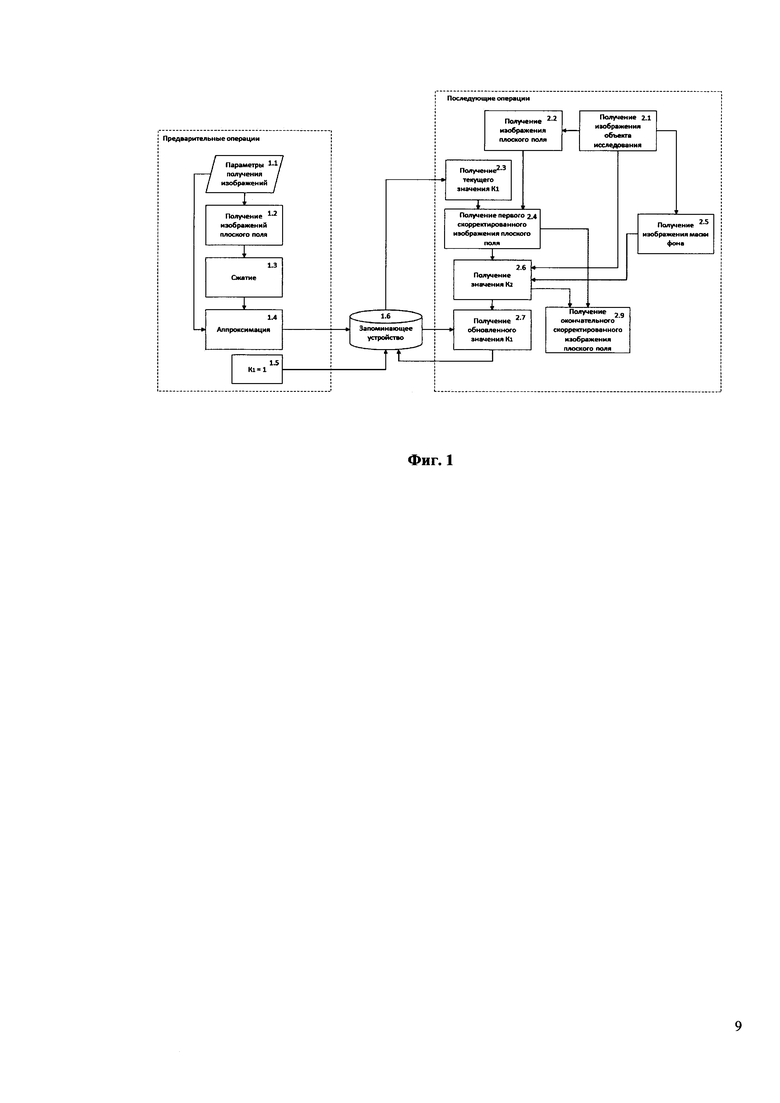
На фиг. 1 показана блок-схема, иллюстрирующая последовательность операций, выполняемых для реализации заявленного способа.
Заявленный способ реализуют следующим образом.
Предварительно осуществляют следующие операции.
1.2 Получают массив исходных изображений плоского поля, каждое из которых соответствует заданному набору 1.1 значений параметров получения (значение анодного напряжения, количество электричества, размер анодного пятна, расстояние «источник-приемник», угол падения пучка рентгеновского излучения на детектор, чувствительность и температура сенсора).
1.3 Осуществляют, например, с использованием биннинга и затем (или) представления в виде суммы степенных или гармонических слагаемых (см. I. Sadeh. Polynomial Approximation of Images, CompMath, 1996 [2]), сжатие каждого из полученных исходных изображений плоского поля с получением в результате массива переменных с меньшей размерностью, чем у соответствующего исходного изображения плоского поля.
1.4 Осуществляют, например, с использованием непрерывной или кусочно-непрерывной функции, аппроксимацию зависимости переменных каждого из полученных массивов от параметров получения соответствующих исходных изображений плоского поля.
Сохраняют (в любом подходящем запоминающем устройстве 1.6) параметры аппроксимирующей зависимости.
1.5 Присваивают первому корректирующему коэффициенту K1 значение 1 и сохраняют его.
Затем осуществляют следующие операции.
2.1 Получают изображение объекта исследования.
2.2 Получают изображение плоского поля, соответствующее параметрам получения изображения объекта исследования, путем подстановки в полученную ранее аппроксимирующую зависимость значений параметров получения изображения объекта исследования и последующей декомпрессии.
В частном варианте реализации, исходные изображения I1, I2, …, IN, каждое из которых было получено при некотором сочетании значений анодного напряжения (kV) и количества электричества (mAs), сжимают с помощью биннинга в изображения Ic1, Ic2, …, IcN размером 16×16 пикселей, а затем сигнал каждого из пикселей аппроксимируют с помощью функции:

Сначала получают сжатое изображение плоского поля путем подстановки в f значений kV и mAs, при которых было получено изображение объекта исследования, а затем осуществляют его декомпрессию, например, с помощью билинейной интерполяции (см., например, William Н. Press, Saul A. Teukolsky et al. Numerical Recipes in C. The Art of Scientific Computing. Second Edition, New York, Cambridge University Press, 1992, pp. 123-128 [3]).
2.3 Получают текущее значение первого корректирующего коэффициента K1.
2.4 Получают первое скорректированное изображение плоского поля путем умножения изображения плоского поля, полученного на этапе 2.2, на K1.
2.5 Получают изображение маски фона с использованием изображения объекта исследования, полученного на этапе 2.1, и одной из операций, выбранной из группы, включающей в себя:
- пороговую обработку изображения (см., например, Волков В.Ю., Турнецкий Л.С. «Пороговая обработка для сегментации и выделения протяженных объектов на цифровых изображениях», «Информационно-управляющие системы», №5, 2009, стр. 10-13 [4]);
- выделение границ на изображении (см. [5]);
- использование предварительно обученной глубокой нейронной сети (см., например, Белим С.В., Ларионов С.Б. «Алгоритм формирования обучающего множества искусственной нейронной сети для сегментации изображения», «Математические структуры и моделирование», №2 (46), 2018, стр. 79-83 [6]);
2.6 Получают значение второго корректирующего коэффициента K2 с использованием изображения объекта исследования, полученного на этапе 2.1, изображения маски фона, полученного на этапе 2.5, и первого скорректированного изображения плоского поля, полученного на этапе 2.4.
Например, значение K2 принимают равным 1, если область, относящаяся к фону, на изображении плоского поля имеет площадь, меньшую по величине заданного порогового значения, или сигнал в ней не попадает в заданный диапазон яркостей, в результате чего упомянутая область становится невалидной, и значение K2 принимают равным эффективному значению отношения яркости в области, относящейся к фону, выделенной на изображении плоского поля, к яркости в области, относящейся к фону, на скорректированном изображении плоского поля, если область, относящаяся к фону, на изображении плоского поля валидна.
Под «эффективным» значением какой-либо величины подразумевается условное постоянное значение этой величины, принимаемое при расчетах номинальных параметров чего-либо, к чему эта величина относится (см., в частности, ГОСТ 26883-86. Внешние воздействующие факторы. Термины и определения [7]).
Определение эффективного значения отношения упомянутых яркостей осуществляют с использованием одной из операций, выбранной из группы, включающей в себя вычисление медианного значения затухания, вычисление среднего значения затухания и итерационное вычисление среднего затухания путем исключения выбросов (см., например, Серышева И.А. «Фильтрация выбросов в задачах статической и динамической обработки данных в эталонах времени и частоты», Вестник ИрГТУ, т. 22, №10, 2018, стр. 67-77 [8]).
2.7 Получают обновленное значение K1 с использованием, по меньшей мере, последнего ранее сохраненного значения коэффициента K1 и значения второго корректирующего коэффициента K2.
В одном из частных вариантов:

где K1(i) - обновленное значение K1, K1(i-1) - последнее ранее сохраненное значение K1, α - весовой коэффициент, выбираемый в зависимости от скорости изменения характеристик рентгеновского устройства из диапазона от 0 до 1.
В другом частном варианте:

где K1(i) - обновленное значение K1, K1(i-1) - последнее ранее сохраненное значение K1, K1(i-2) - предпоследнее ранее сохраненное значение K1, α - весовой коэффициент, выбираемый в зависимости от скорости изменения характеристик рентгеновского устройства из диапазона от 0 до 1.
2.8 Сохраняют обновленное значение K1.
2.9 Получают окончательное скорректированное изображение плоского поля путем умножения первого скорректированного изображения плоского поля, полученного на этапе 2.4, на K2.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УДАЛЕНИЯ СОСТАВЛЯЮЩЕЙ ОТ ФОНОВОГО РАССЕЯНИЯ С РЕНТГЕНОГРАФИЧЕСКОГО ИЗОБРАЖЕНИЯ | 2023 |
|
RU2810896C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УЛУЧШЕНИЯ ПОЛУТОНОВОГО ИЗОБРАЖЕНИЯ | 2000 |
|
RU2174710C1 |
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ ДЛЯ ОБНАРУЖЕНИЯ И СЛЕЖЕНИЯ ЗА ВОЗДУШНЫМИ ОБЪЕКТАМИ | 2010 |
|
RU2419150C1 |
| Способ контроля пространственного положения участников спортивного события на игровом поле | 2016 |
|
RU2616152C1 |
| Способ анализа видеопотока | 2018 |
|
RU2676026C1 |
| УСТРОЙСТВО ОБРАБОТКИ ВИДЕОИНФОРМАЦИИ СИСТЕМЫ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2484531C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ АДАПТИРОВАННОГО К ДИСПЛЕЮ ИЗОБРАЖЕНИЯ HDR | 2021 |
|
RU2776101C1 |
| УСТРОЙСТВО КОРРЕКЦИИ СФЕРИЧЕСКОЙ АБЕРРАЦИИ | 2005 |
|
RU2295713C2 |
| Способ идентификации объекта в видеопотоке | 2018 |
|
RU2676029C1 |
| СПОСОБ ДИАГНОСТИКИ ПАТОЛОГИИ ОКОЛОНОСОВЫХ ПАЗУХ ПУТЕМ РАСПОЗНАВАНИЯ ОБРАЗОВ | 2014 |
|
RU2585700C2 |
Изобретение относится к области медицинской рентгеновской техники и может быть использовано при проведении рентгенографических исследований. Технический результат заключается в уменьшении объема памяти, занимаемого калибровочными данными, и увеличении интервала между калибровками рентгеновского устройства. Способ получения рентгенографического изображения плоского поля характеризуется тем, что предварительно получают массив исходных изображений плоского поля, каждое из которых соответствует заданному набору значений параметров получения, осуществляют сжатие каждого из полученных исходных изображений плоского поля с получением в результате массива переменных с меньшей размерностью, чем у соответствующего исходного изображения плоского поля, осуществляют аппроксимацию зависимости переменных каждого из полученных массивов от значений параметров получения соответствующих исходных изображений плоского поля, сохраняют параметры аппроксимирующей зависимости, сохраняют значение первого корректирующего коэффициента K1 = 1. Затем получают изображение объекта исследования, получают изображение плоского поля, соответствующего значениям параметров получения изображения объекта исследования, получают текущее значение первого корректирующего коэффициента K1 и первое скорректированное изображение плоского поля путем умножения упомянутого изображения плоского поля на K1, получают изображение маски фона с использованием упомянутого изображения объекта исследования, получают значение второго корректирующего коэффициента K2 с использованием упомянутого изображения объекта исследования, упомянутого изображения маски фона и упомянутого первого скорректированного изображения плоского поля, получают обновленное значение K1 с использованием, по меньшей мере, последнего ранее сохраненного значения коэффициента K1 и значения второго корректирующего коэффициента K2 и сохраняют обновленное значение K1, получают окончательное скорректированное изображения плоского поля путем умножения упомянутого первого скорректированного изображения плоского поля на K2. 7 з.п. ф-лы, 1 ил.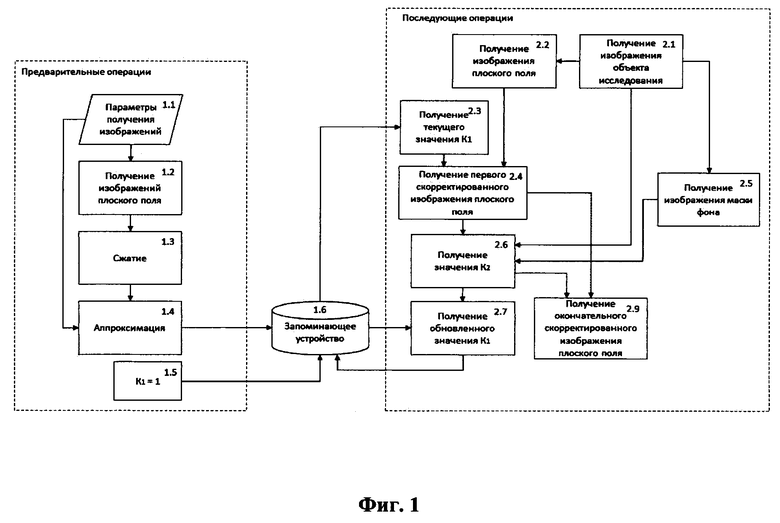
1. Способ получения рентгенографического изображения плоского поля, включающий предварительные получение массива исходных изображений плоского поля, каждое из которых соответствует заданному набору значений параметров получения, сжатие каждого из полученных исходных изображений плоского поля с получением в результате массива переменных с меньшей размерностью, чем у соответствующего исходного изображения плоского поля, аппроксимацию зависимости переменных каждого из полученных массивов от значений параметров получения соответствующих исходных изображений плоского поля, сохранение параметров аппроксимирующей зависимости, сохранение значения первого корректирующего коэффициента K1 = 1 и последующие получение изображения объекта исследования, получение изображения плоского поля, соответствующего значениям параметров получения изображения объекта исследования, получение текущего значения первого корректирующего коэффициента K1 и первого скорректированного изображения плоского поля путем умножения упомянутого изображения плоского поля на K1, получение изображения маски фона с использованием упомянутого изображения объекта исследования, получение значения второго корректирующего коэффициента K2 с использованием упомянутого изображения объекта исследования, упомянутого изображения маски фона и упомянутого первого скорректированного изображения плоского поля, получение обновленного значения K1 с использованием, по меньшей мере, последнего ранее сохраненного значения коэффициента K1 и значения второго корректирующего коэффициента K2 и сохранение обновленного значения K1, получение окончательного скорректированного изображения плоского поля путем умножения упомянутого первого скорректированного изображения плоского поля на K2.
2. Способ по п. 1, характеризующийся тем, что сжатие каждого из полученных исходных изображений плоского поля осуществляют с использованием биннинга.
3. Способ по п. 1 или 2, характеризующийся тем, что сжатие каждого из полученных исходных или предварительно сжатых с помощью биннинга изображений плоского поля осуществляют с использованием представления в виде суммы степенных или гармонических слагаемых.
4. Способ по п. 1, характеризующийся тем, что аппроксимацию зависимости переменных каждого из полученных массивов от параметров получения соответствующих исходных изображений плоского поля осуществляют с использованием непрерывной или кусочно-непрерывной функции.
5. Способ по п. 1, характеризующийся тем, что получение изображения плоского поля, соответствующего параметрам получения изображения объекта исследования, осуществляют путем подстановки в полученную ранее аппроксимирующую зависимость значений параметров получения изображения объекта исследования и последующей декомпрессии.
6. Способ по п. 1, характеризующийся тем, что получение изображения маски фона осуществляют с использованием одной из операций, выбранной из группы, включающей в себя пороговую обработку изображения, выделение границ на изображении и использование предварительно обученной глубокой нейронной сети.
7. Способ по п. 1, характеризующийся тем, что значение K2 принимают равным 1, если область, относящаяся к фону, на упомянутом изображении плоского поля имеет площадь, меньшую по величине заданного порогового значения, или сигнал в ней не попадает в заданный диапазон яркостей, в результате чего упомянутая область становится невалидной, и значение K2 принимают равным эффективному значению отношения яркости в области, относящейся к фону, выделенной на упомянутом изображении плоского поля, к яркости в области, относящейся к фону, на упомянутом скорректированном изображении плоского поля, если область, относящаяся к фону, на упомянутом изображении плоского поля валидна.
8. Способ по п. 7, характеризующийся тем, что определение эффективного значения отношения упомянутых яркостей осуществляют с использованием одной из операций, выбранной из группы, включающей в себя вычисление медианного значения затухания, вычисление среднего значения затухания и итерационное вычисление среднего затухания путем исключения выбросов.
| US 20220280128 A1, 08.09.2022 | |||
| US 11201000 B2, 14.12.2021 | |||
| US 20230143112 A1, 11.05.2023 | |||
| CN 115684223 A, 03.02.2023 | |||
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2016 |
|
RU2705014C1 |
| СПОСОБ МУЛЬТИЭНЕРГЕТИЧЕСКОГО РЕНТГЕНОЛОГИЧЕСКОГО ИССЛЕДОВАНИЯ | 2020 |
|
RU2740870C1 |

