Изобретение относится к области управления беспилотным летательным аппаратом (БПЛА) и может быть использовано для повышения помехоустойчивости радиоканала при обмене телеметрической и командной информацией между БПЛА или аналогично удаленно управляемыми аппаратами и наземным пунктом управления.
Известен «Автоматический беспилотный диагностический комплекс» (патент РФ №2 200 900, F17D 5/02, 2000), содержащий дистанционно-пилотируемый летательный аппарат с планером, силовой установкой, системой автоматического управления и блоком управления бортовыми системами. В систему автоматического управления входят инерциальная навигационная система, приемная аппаратура спутниковой навигационной системы, радиовысотомер малых высот. Предусмотрены также система автоматического дистанционного управления полетом летательного аппарата и работой его систем, включающая системы командного радиоуправления, обзорную телевизионную систему, систему автоконтроля работы бортовых систем, систему обеспечения посадки, мобильный наземный пункт управления.
Недостатками данного технического решения являются низкая помехоустойчивость радиоканала для обмена телеметрической и командной информацией между БПЛА и наземным пунктом управления (НПУ) в условиях воздействия непреднамеренных и преднамеренных помех.
Известен «Автоматический беспилотный диагностический комплекс» (патент РФ №2256894, G01M 3/00, F17D 5/02, G01V 3/165 2000.01), содержащий дистанционно-пилотируемый летательный аппарат, включающий планер, силовую установку с поршневым двигателем, систему автоматического управления с блоком управления бортовыми системами, содержащую инерциальную навигационную систему, приемную аппаратуру спутниковой навигационной системы, систему воздушно-скоростных сигналов, радиовысотомер малых высот и вычислитель действительных координат, систему автоматического дистанционного управления полетом летательного аппарата и работой его систем, включающую приемную аппаратуру командного радиоуправления и обзорную телевизионную систему, радиоретрансляционную систему, систему автоконтроля работы бортовых систем, радиотелеметрическую систему, систему посадки и выпуска парашюта, систему управления двигателем, вычислитель системы автоматического управления, радиомаяк, систему диагностики состояния магистральных трубопроводов и блок управления системой диагностики, размещенные в фюзеляже летательного аппарата, а также мобильный наземный пункт управления, содержащий радиотелеметрическую систему, телевизионную систему, стартовую катапульту и пульт управления, при этом радиотелеметрическая система выполнена в виде двух радиостанций, размещенных на дистанционно-пилотируемом летательном аппарате и наземном пункте управления соответственно, каждая из которых содержит последовательно включенные генератор высокой частоты, фазовый манипулятор, второй вход которого соединен с источником дискретных сообщений и команд, первый смеситель, второй вход которого соединен с выходом первого гетеродина, усилитель первой промежуточной частоты, первый усилитель мощности, дуплексер, вход-выход которого связан с приемо-передающей антенной, второй усилитель мощности, второй смеситель, второй вход которого соединен с выходом второго гетеродина, усилитель второй промежуточной частоты, перемножитель, второй вход которого соединен с выходом первого гетеродина, полосовой фильтр и фазовый детектор, второй вход которого соединен с выходом второго гетеродина, а выход является выходом радиостанции, причем частоты ωг1 и ωг2 гетеродинов разнесены на вторую промежуточную частоту ωг2-ωг1=ωпр2, радиостанция, размещенная на дистанционно-пилотируемом летательном аппарате, излучает сложные сигналы с фазовой манипуляцией на частоте ω1=ωпр1=ωг2, а принимает - на частоте ω2=ωг1, а радиостанция, размещенная на наземном пункте управления, наоборот, излучает сложные сигналы с фазовой манипуляцией на частоте ω2, а принимает - на частоте ω1.
Недостатками данного технического решения являются низкая помехоустойчивость радиоканала для обмена телеметрической и командной информацией между БПЛА и НПУ в условиях воздействия непреднамеренных и преднамеренных помех, так как наличие помех одновременно на частотах ω1 и ω2 или на одной из них делает невозможным обмен телеметрической и командной информацией.
Известен также «Автоматический беспилотный диагностический комплекс» (патент РФ №2503038, G01M 3/16, 2006.01), содержащий дистанционно-пилотируемый летательный аппарат, включающий планер, силовую установку с поршневым двигателем, систему автоматического управления с блоком управления бортовыми системами, содержащую инерциальную навигационную систему, приемную аппаратуру спутниковой навигационной системы, систему воздушно-скоростных сигналов, радиовысотомер малых высот и вычислитель действительных координат, систему автоматического дистанционного управления полетом летательного аппарата и работой его систем, включающую приемную аппаратуру командного радиоуправления, радиоретрансляционную систему, систему автоконтроля работы бортовых систем, радиотелеметрическую систему, систему посадки и выпуска парашюта, систему управления двигателем, вычислитель системы автоматического управления, радиомаяк, систему диагностики состояния магистральных трубопроводов и блок управления системой диагностики, размещенные в фюзеляже летательного аппарата, а также мобильный наземный пункт управления, содержащий радиотелеметрическую систему, телевизионную систему, стартовую катапульту и пульт управления, при этом радиотелеметрическая система выполнена в виде двух радиостанций, размещенных на дистанционно-пилотируемом летательном аппарате и наземном пункте управления соответственно, каждая из которых содержит последовательно включенные синхронизатор, генератор псевдослучайного кода, синтезатор несущих частот, фазовый манипулятор, второй вход которого соединен с выходом источника дискретных сообщений и команд, первый смеситель, второй вход которого через синтезатор частот первого гетеродина соединен с выходом генератора псевдослучайного кода, усилитель первой промежуточной частоты, первый усилитель мощности, дуплексер, вход - выход которого связан с приемопередающей антенной, второй усилитель мощности, второй смеситель, второй вход которого через синтезатор частот второго гетеродина соединен с выходом генератора псевдослучайного кода, и первый усилитель второй промежуточной частоты, последовательно подключенные к выходу синтезатора частот первого гетеродина, перемножитель, полосовой фильтр и фазовый детектор, второй вход которого соединен с выходом синтезатора частот второго гетеродина, а выход является выходом радиостанции, частоты ωг1i и ωг2i синтезаторов частот гетеродинов разнесены на значение второй промежуточной частоты ωг2i - ωг1i =ωпр2i, где i=1, 2, …, М, М - число используемых несущих частот, радиостанция, размещенная на дистанционно-пилотируемом летательном аппарате, излучает сложные сигналы с фазовой манипуляцией с псевдослучайной перестройкой рабочей частоты на частотах ω1i=ωпр1i=ωг2i, а принимает - на частотах ω2i=ωпр3i=ωг1i, где ωпр1i и ωпр3i - первые и третьи промежуточные частоты, а радиостанция, размещенная на наземном пункте управления, наоборот, излучает сложные сигналы с фазовой манипуляцией с псевдослучайной перестройкой рабочей частоты на частотах ω2i, а принимает - на частотах ω1i, каждая радиостанция снабжена синтезатором частот третьего гетеродина, третьим смесителем, вторым усилителем второй промежуточной частоты, коррелятором, пороговым блоком и ключом, причем к выходу второго усилителя мощности последовательно подключены третий смеситель, второй вход которого через синтезатор частот третьего гетеродина соединен с выходом генератора пседослучайного кода, второй усилитель второй промежуточной частоты, коррелятор, второй вход которого соединен с выходом первого усилителя второй промежуточной частоты, пороговый блок и ключ, второй вход которого соединен с выходом первого усилителя второй промежуточной частоты, а выход подключен к второму входу перемножителя, на дистанционно-пилотируемом летательном аппарате частоты ωг1i и ωг3i синтезаторов частот первого и третьего гетеродинов разнесены на удвоенное значение второй промежуточной частоты ωг3i-ωг1i=2ωпр2i и выбраны симметричными относительно частоты ω1i принимаемого сигнала ω1i-ωг1i=ωг3i-ω1i=ωпр2i, а на наземном пункте управления частоты ωг2i и ωг3i синтезаторов частот второго и третьего гетеродинов разнесены на удвоенное значение второй промежуточной частоты ωг2i-ωг3i=2ωпр2i и выбраны симметричными относительно частоты ω2i принимаемого сигнала ω2i-ωг3i=ωг2i-ω2i=2ωпр2i который и выбран в качестве прототипа.
Известный автоматический диагностический комплекс обеспечивает подавление ложных каналов и помех, принимаемых по зеркальным каналам приема, расположенных симметрично относительно частот ωг1i и ωг2i гетеродинов или комбинационных дополнительных каналов за счет псевдослучайной перестройки рабочей частоты. Однако при перестройке по частотам не учитывается, что одна или совокупность частот из установленного диапазона могут быть поражены помехами, что приведет к тому что рабочая частота будет попадать единично или постоянно на пораженные помехами частоты, что обусловит низкую помехоустойчивость радиоканала для обмена телеметрической и командной информацией между БПЛА и НПУ в условиях воздействия непреднамеренных и преднамеренных помех. Кроме того, средствами радио мониторинга можно вскрыть структуру передающихся сигналов телеметрической и командной информации, что обусловит низкую криптографическую стойкость радиоканала при обмене телеметрической и командной информацией между БПЛА и НПУ.
Техническим результатом заявляемого изобретения является разработка системы связи НПУ с БПЛА, обеспечивающей повышение помехоустойчивости и криптографической стойкости радиоканала при обмене телеметрической и командной информацией между БПЛА и НПУ.
Для достижения сформулированной цели в известной системе связи НПУ с БПЛА, содержащая: бортовое оборудование БПЛА, включающее блок коммутации сигналов, блок кодирования сигналов, блок формирования и декодирования пакетов, генератор псевдослучайной последовательности, схема сравнения, передатчик, приемники, контрольные приемники, первая и вторая антенны. Оборудование НПУ, включающее аналогичное по составу бортовому оборудованию блок коммутации сигналов, блок кодирования сигналов, блок формирования и декодирования пакетов, генератор псевдослучайной последовательности, схема сравнения, передатчик, приемники, контрольные приемники, первая и вторая антенны и дополнительно установленные пульт управления, блок ввода криптографической информации и ключей псевдослучайной последовательности. Блок коммутации сигналов в БПЛА и НПУ подключен первым входом и первым выходом с первым выходом и первым входом блока кодирования сигналов, второй выход и второй вход которого подключен к первому входу и первому выходу блока формирования и декодирования пакетов. Третьи входы блока формирования и декодирования пакетов подключены к советующим выходам приемников, а выход подключен к первому входу передатчика. Выход схемы сравнения подключен к входу блока формирования и декодирования пакетов и входу генератора псевдослучайной последовательности, а его входы подключены к соответствующим выходам контрольных приемников. Выход генератора псевдослучайной последовательности подключен к входу передатчика. Выход передатчика подключен к первой антенне. Третьи и четвертые выходы генератора псевдослучайной последовательности подключены к соответствующим входам приемников и входам контрольных приемников, а их входы подключены ко второй антенне. Блок коммутации сигналов в БПЛА подключен вторым входом и вторым выходом с первым выходом и первым входом устройства автоматического управления с блоком управления бортовыми системами, а третьим входом и третьим выходом с первым выходом и первым входом устройства автоматического дистанционного управления полетом летательного аппарата и работой его систем. Блок коммутации сигналов в НПУ подключен вторым входом и вторым выходом с первым выходом и первым входом пульта управления. Блок ввода криптографической информации и ключей псевдослучайной последовательности непостоянной коммутацией подключен к третьим входам блоков кодирования сигналов БПЛА и НПУ на время ввода криптографической информации и ключей псевдослучайной последовательности.
Благодаря новой совокупности существенных признаков за счет введения в систему блока коммутации сигналов, блока кодирования сигналов, блока формирования и декодирования пакетов, генератора псевдослучайной последовательности, схемы сравнения, передатчика, приемников, контрольных приемников, первой и второй антенн, и блока ввода криптографической информации и ключей псевдослучайной последовательности устанавливаемый на НПУ, достигается повышение помехоустойчивости и криптографической стойкости радиоканала при обмене телеметрической и командной информацией между БПЛА и НПУ.
Заявленная система поясняется чертежами:
фиг. 1 - структурная схема системы связи НПУ с БПЛА;
фиг. 2 - структурная схема приемопередающего тракта;
фиг. 3 - структурная схема блока кодирования сигналов;
фиг. 4 - структурная схема блока ввода криптографической информации и ключей псевдослучайной последовательности.
На фиг. 1 изображена структурная схема системы связи НПУ с БПЛА, включающая: БПЛА (1), НПУ (2), устройство автоматического управления с блоком управления бортовыми системами (3), устройство автоматического дистанционного управления полетом летательного аппарата и работой его систем (4), пульт управления (5), блок коммутации сигналов (6), блок кодирования сигналов (7), блок формирования и декодирования пакетов (8), генератор псевдослучайной последовательности (9), схема сравнения (10), передатчик (11), приемники (12.1), …, (12.k), контрольные приемники (13,1), …, (13,k), блок ввода криптографической информации и ключей псевдослучайной последовательности (14), первая (15) и вторая (16) антенны.
Схемы устройств автоматического управления с блоком управления бортовыми системами (3) и схемы устройства автоматического дистанционного управления полетом летательного аппарата и работой его систем (4) известны и приведены, например, в патенте на изобретение: Автоматический беспилотный диагностический комплекс, 2503038 С1, опубликовано 27.12.2013.
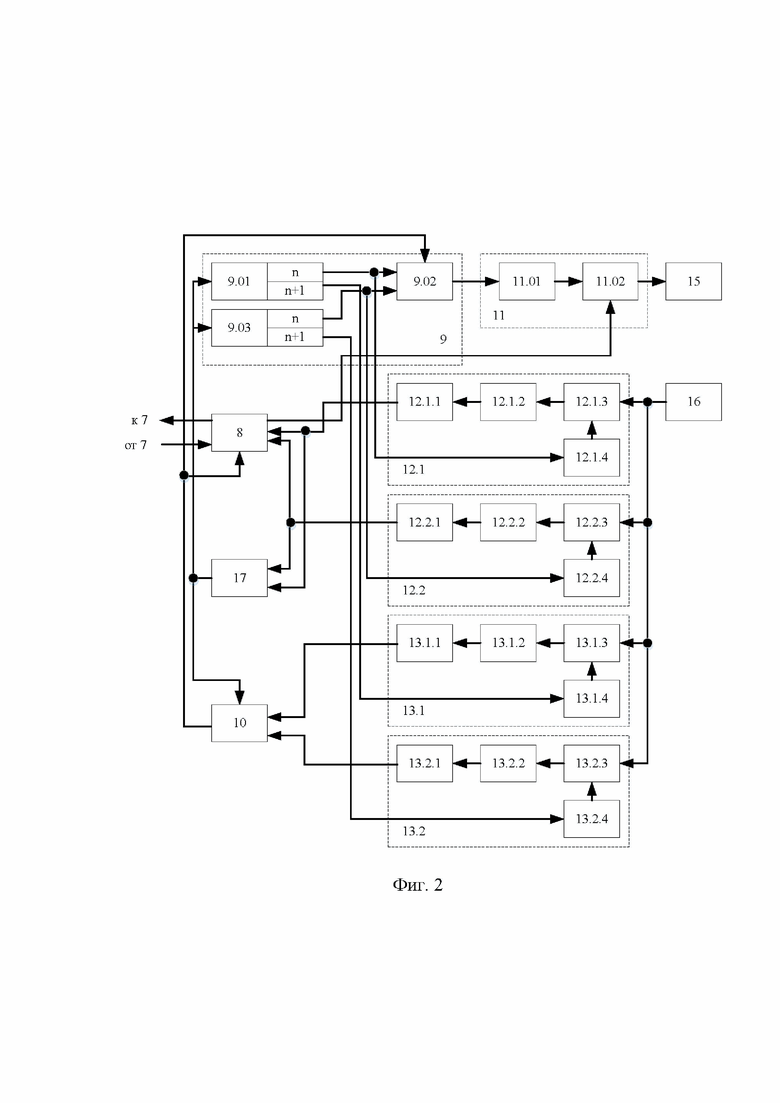
На фиг. 2 представлена структурная схема приемопередающего тракта, функционирующего на БПЛА (1) и НПУ (2), и реализующего радиолинию с ППРЧ автоматически адаптирующуюся к текущей помеховой обстановке.
Схемы приемопередающего тракта известны и описаны, например, в патенте на изобретение: Способ передачи информации в радиолинии с псевдослучайной перестройкой рабочих частот и устройство его реализующее, 2099886 С1, опубликовано 20.12.1997.
Приемопередающий тракт состоит из: генератора псевдослучайной последовательности (ГПСП) ГПСП 9, передатчика 11, устройства формирования и декодирования пакетов (УФДП) УФДП 8, первого приемника 12.1, второго приемника 12.2, схемы сравнения (СС) 10, первого контрольного приемника 13.1, второго контрольного приемника 13.2, первой антенны (А1) 15, второй антенны (А2) 16, синхрогенератора (СГ) 17. В свою очередь блок ГПСП 9 состоит из генератора первой ПСП (ГПСП1) 9.01 с выходами n и n+1 такта, генератора второй ПСП (ГПСП2) 9.03 с выходами n и n+1 такта, коммутатора 9.02. Передатчик 11 состоит из первого синтезатора частот (СЧ1) 11.01 и модулятора (М) 11.02. Первый приемник 12.1 состоит из первого демодулятора (Д1) 12.1.1, первого усилителя промежуточной частоты (УПЧ1) 12.1.2, первого преобразователя частоты (ПЧ1) 12.1.3, второго синтезатора частоты (СЧ2) 12.1.4. Второй приемник состоит из второго демодулятора (Д2) 12.2.1, второго усилителя промежуточной частоты (УПЧ2) 12.2.2, второго преобразователя частоты (ПЧ2) 12.2.3, третьего синтезатора частоты (СЧ3) 12.2.4. Первый контрольный приемник состоит из первого порогового устройства (ПУ1) 13.1.1, первого амплитудного детектора (АД1) 13.1.2, третьего преобразователя частоты (ПЧ3) 13.1.3. четвертого синтезатора частоты (СЧ4) 13.1.4. Второй контрольный приемник состоит из второго порогового устройства (ПУ2) 13.2.1, второго амплитудного детектора (АД) 13.2.2, четвертого преобразователя частоты (ПЧ4) 13.2.3, пятого синтезатора частоты (СЧ3) 13.2.4. Причем выход блока кодирования сигналов 7 подключен к первому входу УФДП 8, первый выход которого соединен с вторым входом М 11.02 передатчика 11, первый выход блока ГПСП 9 с выхода коммутатора (К) 9.02 подключен к первому входу передатчика 11 (входу СЧ1 11.01). Второй выход блока ГПСП 9 (выход текущего такта ГПСП1 9.01) подключен к второму входу первого приемника 12.1 (входу СЧ2 12.1.4) и первому входу К 9.02. Третий выход блока ГПСП 9 (выход следующего такта ГПСП1 9.01) соединен с вторым входом первого контрольного приемника 13.1 (входом СЧ4 13.1.4). Четвертый выход блока ГПСП 9 (выход текущего такта ГПСП2 9.03) подключен к второму входу К 9.02 и второму входу второго приемника 12.2 (входу СЧ3 12.2.4). Пятый выход блока ГПСП 9 (выход следующего такта ГПСП2 9.03) соединен со вторым входом второго контрольного приемника 13.2 (входом СЧ3 13.2.4). Выход передатчика 11 (выход М 11.02) подключен к входу А1 15. Выход А2 16 подключен к первым входом приемников 12.1, 12.2 и контрольных приемников 13.1, 13.2 (к первым входам соответственно ПЧ1 12.1.3, ПЧ2 12.2.3, ПЧ3 13.1.3, ПЧ4 13.2.3). Выход первого приемника 12.1 (выход Д1 12.1.1) соединен с вторым входом УФДП 8 и первым входом СГ 17. Выход второго приемника 12.2 (выход Д2 12.2.1) соединен с третьим входом УФДП 8 и вторым входом СГ 17. Выход первого контрольного приемника 13.1 (выход ПУ1 13.1.1) и выход второго контрольного приемника 13.2 (выход ПУ2 13.2.1) соединены соответственно с первым и вторым входами СС 10, выход которого соединен с первым входом блока ГПСП 9 (управляющим входом К 9.02). Выход СГ 17 подключен к входам СС 10, блока ГПСП 9 (входам ГПСП1 9.01 и ГПСП2 9.02). Второй выход УФДП 8 соединен с входом блока кодирования сигналов 7. Выход СЧ2 12.1.4 первого приемника 12.1 подключен к второму входу ПЧ1 12.1.3. Выход ПЧ1 12.1.3 первого приемника 12.1 соединен с входом УПЧ1 12.1.2. Выход УПЧ1 12.1.2 подключен ко входу Д1 12.1.1. Выход СЧ3 12.2.4 второго приемника 12.2 подключен к второму входу ПЧ2 12.2.3, выход которого соединен с входом УПЧ2 12.2.2. Выход УПЧ2 12.2.2 подключен к входу Д2 12.2.1. Выход СЧ4 13.1.4 первого контрольного приемника 13.1 подключен ко второму входу ПЧ3 13.1.3, выход которого соединен с входом АД1 13.1.2. Выход АД1 13.1.2 соединен с входом ПУ1 13.1.1. Выход СЧ3 13.2.4 второго контрольного приемника 13.1 соединен со вторым входом ПЧ4 13.2.3, выход которого соединен с входом АД2 13.2.2, выход которого подключен к входу ПУ2 13.2.1.
Пороговые устройства (ПУ1 13.1.1, ПУ2 13.2.1) и СС 10 могут быть построены по известным схемам, представленные в: Способ передачи информации в радиолинии с псевдослучайной перестройкой рабочих частот и устройство его реализующее, 2 099 886 С1, опубликовано 20.12.1997.
Коммутатор К 9.02 может быть реализован с использованием реле, либо на микросхемах, выполняющих функции коммутаторов, с необходимым числом коммутируемых каналов соответственно разрядности кода ПСП (см. справочник Цифровые и аналоговые интегральные микросхемы. М: Радио и связь, 1989, с. 47-139).
УФДП 8 наиболее целесообразно строить с использованием микропроцессорной техники. Один из вариантов его построения рассмотрен в книге Вычислительные сети с пакетной радиосвязью. Киев: Техника, 1989, с. 192-206.
Остальные элементы устройства могут быть построены по известным схемам, рассмотренным в литературе: Цифровые радиоприемные системы. Под ред. М.И. Жодзинского. М. Радио и связь, 1990, с 53-54, 68-80, 173-182; К.М. Павлов. Радиоприемные устройства магистральной KB связи. М. Связь, 1980, с. 54-57; Б.П. Серков. Распространение радиоволн и антенные устройства. Л. ВАС, 1981, с. 280-312; Р.К. Диксон. Широкополосные системы. Пер. с англ. Л.Ф. Жигулина. Под ред. В.И. Журавлева. М. Связь, 1979, с. 60-82.
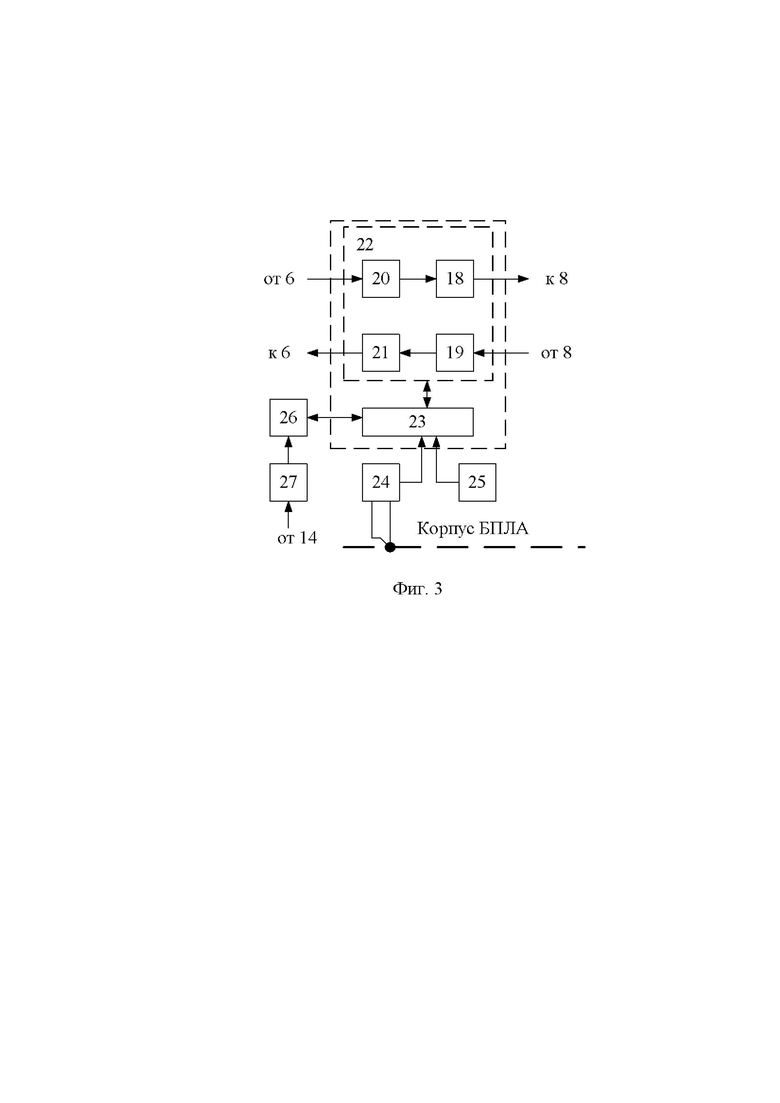
На фиг. 3 представлена структурная схема блока кодирования сигналов 7. Блок 7 содержит соединенные между собой соответствующим образом генератор тактовых импульсов 25, формирователь сигнала «сброс» 24, контроллер 23, блок памяти 26, цифровой сигнальный процессор 22, узел сопряжения 27 с блоком ввода криптографической информации и ключей псевдослучайной последовательности 14. В состав цифрового сигнального процессора 22 входят соединенные интерфейсом канальный кодер 18, канальный декодер 19, шифратор 20 и дешифратор 21. Блок памяти 26 выполнен в виде несъемного элемента, подключенного входом через контроллер 23 к формирователю сигнала «сброс» 24, который подключен контактом концевого выключателя к корпусу БПЛА 1.
Блок кодирования сигналов 7 предназначен для кодирования передаваемой информации по радиолинии с ППРЧ между БПЛА 1 и мобильным наземным пунктом управления 2.
Цифровой сигнальный процессор 22 предназначен для выполнения функций канального кодера 18, канального декодера 19, шифратора 20, дешифратора 21 с помощью программного обеспечения.
Контроллер 23 предназначен для программного управления цифровым сигналим процессором 22 для переключения различных режимов работы блока и при выборе ключей кодирования.
Цифровой сигнальный процессор 22 и его контроллер 23 могут быть реализованы, например, на базе микросхем типа TMS320VC5470.
Генератор тактовых импульсов 25 предназначен для обеспечения синхронизации цифровых устройств блока. Генератор тактовых импульсов может быть реализован, например, на основе программируемого генератора AD2S99BPZ.
Блок памяти 26 предназначен для хранения микропрограммного обеспечения цифрового сигнального процессора 22 и контроллера 23. Блок памяти 26 может быть реализован, например, на основе микросхем типа AM29DL800BB.
Формирователь сигнала «сброс» 24, который управляется механическим концевым выключателем предназначен удаления микропрограммного обеспечения блока памяти 26 цифрового сигнального процессора 22 и контроллера 23 в случае несанкционированного вскрытия БПЛА 1. В качестве формирователя сигнала «сброс» 24 может быть использована одна из известных схем, например, приведенная в изобретении «Формирователь сигналов сброса для блоков памяти» SU 1108504 А от 15.08.1984 г.
На фиг. 4 представлена структурная схема блока ввода криптографической информации и ключей псевдослучайной последовательности.
Блок ввода криптографической информации и ключей псевдослучайной последовательности 14 содержит блок памяти 30, цифровой процессор 28, средство световой индикации 31, узел сопряжения 29 с блоком кодирования сигналов 7, узел сопряжения с внешними источниками электропитания 34, узел сопряжения с персональным компьютером 36, узел электропитания в составе аккумулятора 35, контроллера зарядки от внешних источников электропитания 33, контроллера электропитания 32. Цифровой процессор 28 соединен интерфейсом с средством световой индикации 31, узлом сопряжения 29 с блоком кодирования сигналов 7, узлом сопряжения с персональным компьютером 36, контроллером электропитания 32 и блоком памяти 30.
Блок ввода криптографической информации и ключей псевдослучайной последовательности 14 предназначен для взаимодействия с блоком кодирования сигналов 7 при записи в его память 26 криптографической информации и ключей псевдослучайной последовательности. Криптографическая информация и ключи псевдослучайной последовательности записываются в блок памяти 30, откуда затем по проводному интерфейсу записываются как в блок кодирования сигналов 7, установленному на БПЛА 1, так и установленному на мобильном наземном пункте управления 2.
Цифровой процессор 28 предназначен для обмена данными между средством световой индикации 31 в процессе ввода криптографической информации и контролирует работу узла электропитания устройства путем обмена данными с контроллером управления электропитанием 32. Цифровой процессор 28 выполняет перечисленные функции с помощью программного обеспечения. Цифровой процессор 28 может быть реализован, например, на базе микроконтроллера типа STM32.
Контроллер зарядки от внешних источников электропитания 33, контроллер электропитания 32 и цифровой процессор 28 могут быть реализованы, например, на основе микросхем серий МАХ и LTC.
Система работает следующим образом.
Оператор БПЛА записывает в память 30 блока ввода криптографической информации и ключей псевдослучайной последовательности 14 соответствующие данные. Далее записанные данные вводятся оператором БПЛА в память 26 устройства кодирования сигналов 7 БПЛА 1 и НПУ 2. После включения электропитания БПЛА, информация с системы автоматического управления и блока управления бортовыми системами 3, а также с системы автоматического дистанционного управления полетом летательного аппарата и работой его систем 4 через блок коммутации сигналов 6 поступает в блок кодирования сигналов 7, где шифратор 20 осуществляет кодирование информационного потока с помощью алгоритма, описанного в ГОСТ 28147-89. Далее, полученный кодированный битовый поток преобразуется в канальном кодере 18, который обеспечивает помехоустойчивое кодирование сигналов для передачи в сложной помеховой обстановке. Далее кодированный сигнал поступает на первый вход УФДП 8, где последовательно поступающий информационный сигнал делят на блоки заданной длины. Сформированный таким образом пакет подают на второй вход М 11.02 и переносят на радиочастоту. Радиосигнал через А1 15 излучают в радиоэфир. Каждый пакет переданной информации излучают на частоте, согласно кода ПСП1 либо ПСП2. Переключает последовательности К 9.02 по команде СС 10. Основанием для выбора ПСП является анализ помеховой обстановки на частотах, на которые должны перестроиться ПСП в следующий такт. Выполняют анализ контрольные приемники 13.1 и 13.2. Рассмотрим их работу на примере приемника 13.1.
Код частоты следующего такта ГПСП1 9.01 с выхода n+1 такта ГПСП 9 подают на вход СЧ4 13.1.4. Синтезатор СЧ4 13.1.4 вырабатывает колебание необходимой частоты, которое подают на второй вход ПЧ3 13.1.3. На первый вход ПЧЗ 13.1.3 поступает помеховый сигнал, принимаемый А2 16. В результате преобразования на выходе ПЧ3 13.1.3 выделяют напряжение помех на соответствующей частоте приема. Его детектируют в АД1 13.1.2, и по величине напряжения на выходе АД1 13.1.2 ПУ1 13.1.1 делает вывод о уровне помех на анализируемой частоте. Результат анализа падают на вход СС 10.
Аналогично осуществляют анализ помеховой обстановки на последующей частоте ГПСП2 9.03. Схема сравнения выбирает лучшую частоту из двух предложенных по наименьшему уровню помех и дает команду на подключение К 9.02.
Прием информационного сигнала, передаваемого с БПЛА 1 в НПУ 2 осуществляют одновременно по обеим программам ПСП приемниками 12.1 и 12.2, так как на приемном конце радиолинии неизвестно, на какой из последовательностей будут производить передачу следующего пакета. А2 16 преобразует электромагнитное колебание в электрическое и подает его на входы обоих приемников 12.1 и 12.2. Работа приемников аналогична. Рассмотрим принцип их действия на примере первого приемника 12.1. Код частоты с выхода текущего такта ГПСП 9 ГПСП1 9.01 подают на вход СЧ2 12.1.4, который вырабатывает колебание необходимой частоты. Колебание поступает на второй вход ПЧ1 12.1.3. Выделенный на промежуточной частоте сигнал усиливают УПЧ1 12.1.2 и демодулируют Д1 12.1.1.
Демодулированные сигналы обоих приемников поступают на второй и третий входы УФДП 8. Устройство выделяет тот канал, на котором передавался сигнал по записанному в пакете адресу, декодирует пакет и подает полученный информационный сигнал в блок кодирования сигналов 7. Кроме того, на основе анализа синхроимпульсов СГ 17 управляет работой ГПСП 9.01 и 9.03. С блока кодирования сигналов 7 сигналы поступают через блок коммутации сигналов 6 в пульт управления 5. Оператор БПЛА на основе принятой информации применяет управляющие воздействия. Передача сигналов от НПУ 2 к БПЛА 1 аналогична.
В случае попадания БПЛА к несанкционированному пользователю и попыткой вскрытия его фюзеляжа механический концевой выключатель срабатывает и дает сигнал на формирователь сигнала «сброс» 24, который удаляет микропрограммное обеспечение блока памяти 26 цифрового сигнального процессора 22 и контроллера 23 на БПЛА 1. Таким образом, несанкционированный пользователь не получит доступ к ключу для кодирования передаваемой информации и ключу псевдослучайной последовательности, что делает невозможным управление остальными БПЛА работающими от данного НПУ 2 на текущем сеансе управления. В памяти 26 в устройстве кодирования сигналов 7 хранятся один ключ для кодирования передаваемой информации и один ключ псевдослучайной последовательности. После невозвращения на НПУ 2 БПЛА 1, попавшего к несанкционированному пользователю, оператор на остальных БПЛА для следующего сеанса управления перезаписывает ключи для кодирования передаваемой информации и псевдослучайной последовательности.
В память 30 блока ввода криптографической информации и ключей псевдослучайной последовательности 14 вводятся несколько ключей для кодирования передаваемой информации и ключей псевдослучайной последовательности, что позволяет повысить скорость ввода и перезаписи соответствующих данных на несколько БПЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2012 |
|
RU2503038C1 |
| Система мониторинга состояния льда и окружающей среды | 2019 |
|
RU2715845C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ С ПОМОЩЬЮ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ | 2010 |
|
RU2454348C2 |
| ШИРОКОПОЛОСНОЕ ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2210862C1 |
| ШИРОКОПОЛОСНОЕ ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО | 2006 |
|
RU2311734C1 |
| СПОСОБ ПЕРЕДАЧИ ДИСКРЕТНОЙ ИНФОРМАЦИИ В РАДИОЛИНИИ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 1999 |
|
RU2178237C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ В РАДИОЛИНИИ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧИХ ЧАСТОТ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 1994 |
|
RU2099886C1 |
| СПОСОБ СЛИЧЕНИЯ ШКАЛ ВРЕМЕНИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2389054C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2007 |
|
RU2348560C1 |
| Система контроля соблюдения правил дорожного движения | 2019 |
|
RU2725101C1 |
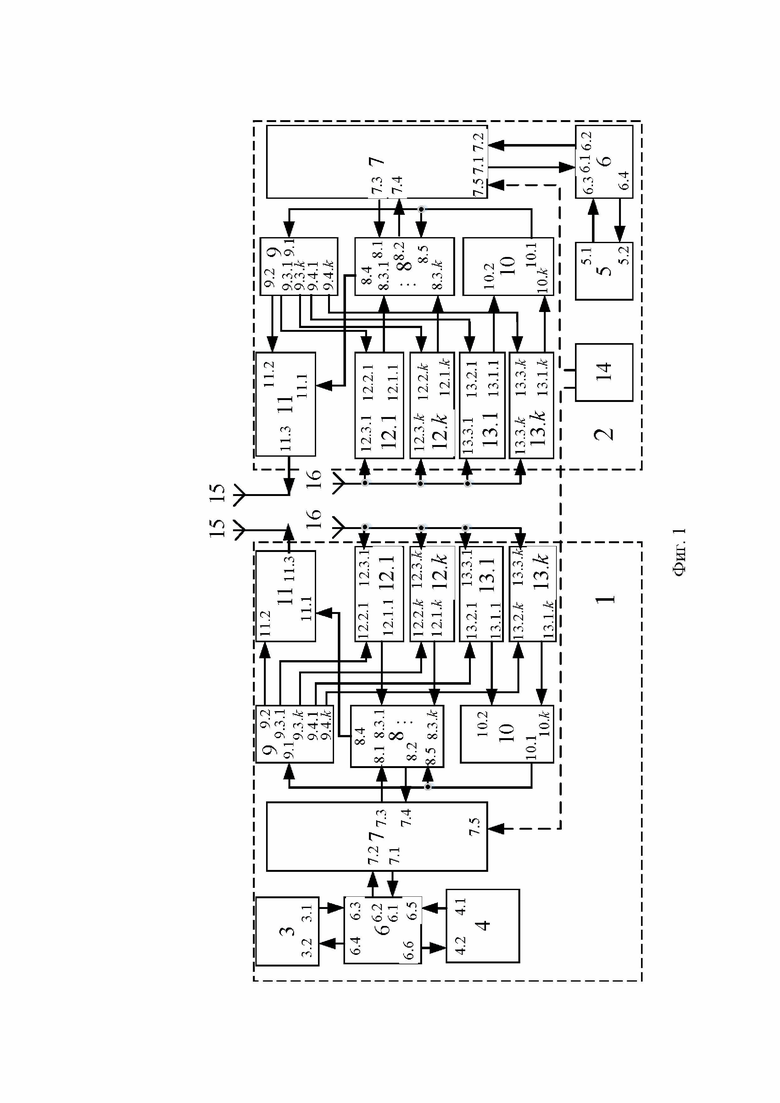

Система связи наземного пункта управления (НПУ) с беспилотным летательным аппаратом (БПЛА) содержит бортовое оборудование БПЛА и оборудование НПУ. Бортовое оборудование и оборудование НПУ содержат одинаковые по составу блок коммутации сигналов (6), блок кодирования сигналов (7), блок формирования и декодирования пакетов (8), генератор псевдослучайной последовательности (9), схема сравнения (10), передатчик (11), k приемников (12) и k контрольных приемников (13), две антенны (15,16). Оборудование НПУ дополнительно содержит пульт управления (5), блок ввода криптографической информации и ключей псевдослучайной последовательности (14), соединенные определенным образом. Обеспечивается повышение помехоустойчивости и криптографической стойкости радиоканала при обмене телеметрической и командной информацией между БПЛА и НПУ. 4 ил.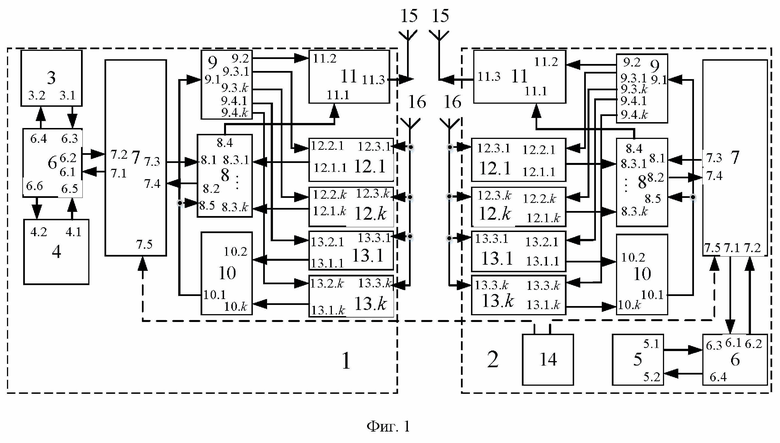
Система связи наземного пункта управления (НПУ) с беспилотным летательным аппаратом (БПЛА), содержащая: бортовое оборудование БПЛА (1), включающее блок коммутации сигналов (6), блок кодирования сигналов (7), блок формирования и декодирования пакетов (8), генератор псевдослучайной последовательности (9), схема сравнения (10), передатчик (11), приемники (12.1),…,(12.k), контрольные приемники (13,1),…,(13, k), первая (15) и вторая (16) антенны; оборудование НПУ (2), включающее аналогичное по составу бортовому оборудованию блок коммутации сигналов (6), блок кодирования сигналов (7), блок формирования и декодирования пакетов (8), генератор псевдослучайной последовательности (9), схема сравнения (10), передатчик (11), приемники (12.1),…,(12.k), контрольные приемники (13,1),…,(13, k), первая (15) и вторая (16) антенны, и дополнительно установленные пульт управления (5), блок ввода криптографической информации и ключей псевдослучайной последовательности (14), при этом блок коммутации сигналов (6) в БПЛА (1) и НПУ (2) подключен первым входом (6.1) и первым выходом (6.2) с первым выходом (7.1) и первым входом (7.2) блока кодирования сигналов (7), второй выход (7.3) и второй вход (7.4) которого подключен к первому входу (8.1) и первому выходу (8.2) блока формирования и декодирования пакетов (8), третьи (8.3.1),…,(8.3.k) входы которого подключены к советующим выходам (12.1.1),…,(12.1.k.) приемников (12.1),…,(12.k), а выход (8.4) подключен к первому входу (11.1) передатчика (11), выход (10.1) схемы сравнения (10) подключен к входу (8.5) блока формирования и декодирования пакетов (8) и входу (9.1) генератора псевдослучайной последовательности (9), а его входы (10.2),…,(10.k) подключены к соответствующим выходам (13.1.1),…,(13.1.k) контрольных приемников (13,1),…,(13,k), выход (9.2) генератора псевдослучайной последовательности (9) подключен к входу (11.2) передатчика (11), выход (11.3) которого подключен к первой антенне (15), третьи (9.3.1),…,(9.3.k) и четвертые выходы (9.4.1),…,(9.4.k) генератора псевдослучайной последовательности (9) подключены к соответствующим входам (12.2.1),…,(12.2.k) приемников (12.1),…,(12.k) и входам (13.2.1),…,(13.2.k) контрольных приемников (13,1),…,(13, k), а их входы (12.3.1),…,(12.3.k) и (13.3.1),…,(13.3.k) подключены ко второй антенне (16), блок коммутации сигналов (6) в БПЛА (1) подключен вторым входом (6.3) и вторым выходом (6.4) с первым выходом (3.1) и первым входом (3.2) устройства автоматического управления с блоком управления бортовыми системами (3), а третьим входом (6.5) и третьим выходом (6.6) с первым выходом (4.1) и первым входом (4.2) устройства автоматического дистанционного управления полетом летательного аппарата и работой его систем (4), а блок коммутации сигналов (6) в ЦПУ (2) подключен вторым входом (6.3) и вторым выходом (6.4) с первым выходом (5.1) и первым входом (5.2) пульта управления (5), блок ввода криптографической информации и ключей псевдослучайной последовательности (14) непостоянной коммутацией подключен к третьим входам (7.5) блоков кодирования сигналов (7) БПЛА (1) и НПУ (2) на время ввода криптографической информации и ключей псевдослучайной последовательности.
| АДАПТИВНОЕ УСТРОЙСТВО ПЕРЕДАЧИ ДАННЫХ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 2008 |
|
RU2356171C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2309543C2 |
| УНИФИЦИРОВАННЫЙ БОРТОВОЙ МОДУЛЬ АВИАЦИОННОГО НАБЛЮДЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2794287C1 |
| 0 |
|
SU155323A1 | |
| KR 101576744 B1, 11.12.2015 | |||
| WO 2016154939 A1, 06.10.2016. | |||

