Область техники
Заявляемое изобретение относится к области систем управления воздушным движением беспилотных летательных аппаратов (далее - БЛА) и может быть использовано для мониторинга и управления воздушным движением БЛА.
Уровень техники
Безопасные полеты за пределами зоны прямой видимости - крайне важный, если не сказать важнейший, элемент для успешного развития нового рынка услуг БЛА в Европе и мире.
Из уровня техники известна система передачи данных для летательного аппарата, предназначенная для передачи данных между летательным аппаратом и пунктом управления (см. патент RU 2384947 от 17.07.2006), которая содержит приемо-передающее устройство, устройство управления сообщениями, устройство кодирования/декодирования сообщений, устройство сжатия информации, интерфейсное средство человек/машина, записывающее устройство для фиксации сообщений.
Известна система беспроводного управления беспилотными летательными аппаратами (см. патент US2007069128 от 09.06.2006), которая включает в себя наземный пункт управления (НПУ), БЛА, оборудованный устройствами управления, устройствами передачи и приема информации, а также беспроводную систему связи между БЛА и НПУ. Метод заключается в том, что беспроводная система связи, ручные устройства ввода, приема и передачи данных (например, сотовый телефон или PDA), а также другие аналогичные технологии используют для связи БЛА и НПУ, передачи команд управления параметрами полета БЛА и для получения данных наблюдения с БЛА.
Известен способ управления беспилотным летательным аппаратом (см. патент RU 2562890 от 10.09.2015), который оборудован бортовой автоматической системой управления, спутниковой навигационной системой, датчиком времени, представляющим собой высокоточные часы для синхронизации времени, приемо-передающей радиостанцией, при этом передачу команд управления движением БПЛА и передачу данных о координатах и параметрах его движения осуществляют через основой спутниковый канал связи со стационарного или подвижного пункта управления, оборудованного автоматизированным рабочим местом оператора, отличающийся тем, что учитывают компенсацию задержки в канале пере-дачи команд управления, используя спутниковый канал связи, определяя динамические характеристики воздействия на систему управления БПЛА, а для посадки БПЛА в четко задан-ной точке транслируют через спутниковый ка-нал связи команды управления посадкой беспилотного летательного аппарата, которую осуществляют на площадку, выбранную оператором по информации, передаваемой с блока автоматизированной системы управления борта беспилотного летательного аппарата, оборудованного видеокамерой.
Наиболее близким по технической сущности к заявляемому устройству является способ управления беспилотным летательным аппаратом и устройство для его реализации по патенту RU 2390815 C1 от 27.05.2020, в котором раскрыт способ управления одним или несколькими беспилотными летательными аппаратами, каждый из которых оборудован бортовой автоматической системой управления, спутниковой навигационной системой, высокоточными синхронизированными часами, а также бортовым вычислителем и приемо-передающей радиостанцией, с помощью которой осуществляется цифровая радиосвязь с базовой радиостанцией, с стационарным или подвижным пунктом управления, который оборудован автоматизированным рабочим местом оператора, отличающийся тем, что передача команд управления движением беспилотного летательного аппарата, передача данных о координатах и параметрах его движения, а также передача идентификационных номеров и данных о координатах и параметрах движения других подвижных объектов, оборудованных приемопередающими радиостанциями и находящихся в пределах радиовидимости, производится в один или несколько общих радиоканалов, причем трансляция сообщений каждой передающей радиостанцией производится в заранее заданный отрезок дискретной шкалы единого времени с временным упреждением, которого достаточно для компенсации запаздывания в получении и исполнении указанных команд. Каждый из участников движения передает в общий канал в заранее заданный интервал времени или по запросу свой идентификационный номер, данные о собственных пространственных координатах. Сообщение, передаваемое бортовой радиостанцией БЛА содержит данные о параметрах внешней среды, такие как скорость и направление ветра, температуру и атмосферное давление на высоте полета, а также дополнительную информацию о режимах, неисправностях и отказах бортового оборудования. По данным о текущих координатах и параметрах движения подвижных объектов, которые получены по общему радиоканалу, в пункте управления (ПУ) формируют двух или трехмерное изображение воздушной обстановки на экране монитора АРМ оператора, рассчитывают прогнозируемые траектории всех участников движения, после чего проверяют критерии сближения. При обнаружении прогноза опасного сближения, вырабатывают команды маневра уклонения БЛА и транслируют их в общий радиоканал.
Приведенные выше системы и устройства не обеспечивают прием и передачу данных для других участников полета, что не позволяет организовать должную безопасность полета в воздушном пространстве вследствие отсутствия наблюдаемости БЛА другими пилотируемыми летательными аппаратами и наоборот.
Раскрытие изобретения
Задачей предполагаемого изобретения является создание унифицированного бортового модуля авиационного наблюдения беспилотных летательных аппаратов.
Техническим результатом предполагаемого изобретения является расширение функциональных возможностей бортового модуля беспилотного летательного аппарата за счет включения в состав модуля, позволяющего получать данных о параметрах полета других участников воздушного движения и передавать им данные своего полета с целью повышения безопасности полета.
Для достижения поставленной задачи и указанного технического результата предлагается создание унифицированного бортового модуля авиационного наблюдения (далее УБМ АН) беспилотных летательных аппаратов, содержащего:
- вычислительный управляющий навигационный модуль 1, формирующий команды управления БЛА и передающий их в автопилот БЛА,
- модуль 2 связи с автопилотом БЛА, с помощью которого передаются команды управления БЛА, сформированные на предыдущем модуле 1, и данные телеметрии, полученные от автопилота БЛА,
- навигационный модуль 4, содержащий навигационный спутниковый приемник GNSS и передающий данные о координатах БЛА в модуль 1 и модуль 3 обмена данными,
- модуль 6 с идентификационными метками БЛА, передающий данные в модуль 3 обмена данными,
- модуль 7 запоминающего устройства, обеспечивающий хранение данных телеметрии БЛА, полученных от автопилота БЛА через модуль 2,
- бортовой модуль 5 приема/передачи данных автоматического зависимого наблюдения вещательного типа АЗН-В стандартов 1090 ЕS и VDL-4 для других воздушных судов и службы управления воздушным движением,
- модуль 3 обмена данными, обеспечивающий передачу на наземный комплекс средств наблюдения за воздушным движением БЛА посредством данных телеметрии БЛА, полученных от автопилота БЛА через модуль 2, данных о координатах БЛА, полученных от модуля 4, идентификационные метки БЛА, полученные от модуля 6, данных, полученных от модуля 5, и обеспечивающий прием и передачу на модуль 1 от наземных служб команд оперативных поправок к описанию зон полёта, а также команд экстренной посадки.
При этом модуль 3 включает в свой состав по крайней мере одно из средств обмена данными - бортовой транспондер и/или модуль связи Iridium и/или модуль связи VDL-4.
Краткое описание чертежей
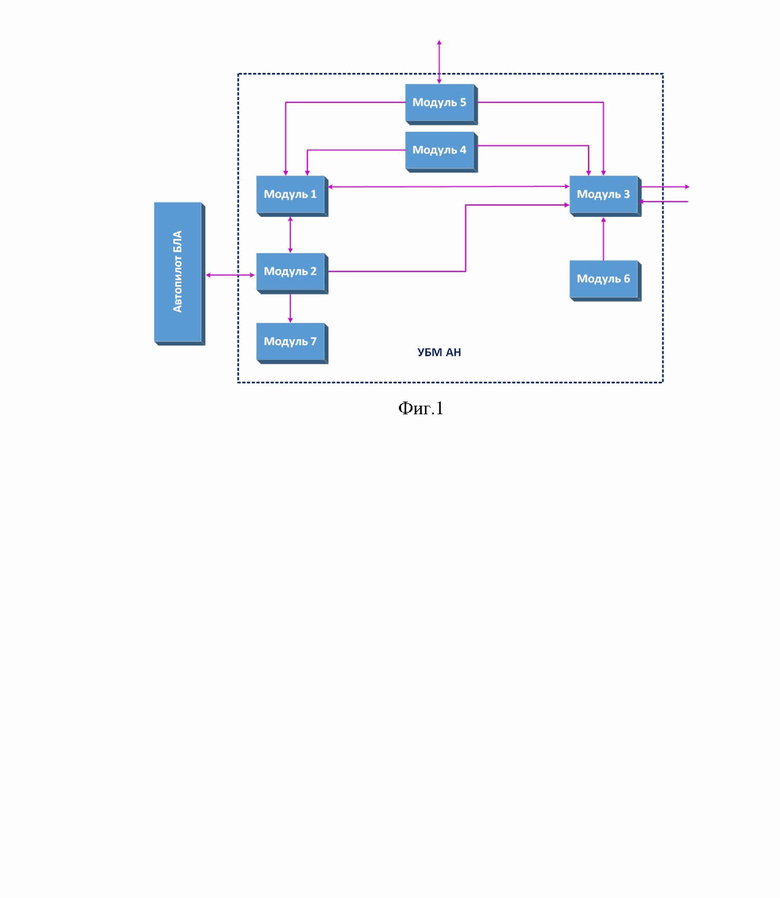
На фиг. 1 изображена схема расположения и взаимодействия модулей в унифицированном бортовом модуле (архитектура УБМ АН).
Осуществление изобретения
В данном разделе описания будет приведен наиболее предпочтительный вариант осуществления изобретения, который тем не менее, не ограничивает другие возможные варианты осуществления явным образом следующие из материалов заявки и понятные специалисту.
В состав унифицированного бортового модуля авиационного наблюдения (УБМ АН) входят следующие компоненты:
вычислительный управляющий навигационный модуль (1);
модуль связи с автопилотом БЛА (2);
модуль обмена данными (3):
навигационный модуль (4);
бортовой модуль приема/передачи данных АЗН-В (5):
модуль с идентификационными метками Remote ID (6);
модуль запоминающего устройства (7).
Модуль 1 обеспечивает формирование команд управления БЛА и передачу их посредством модуля 2 в автопилот БЛА, а также решение задачи предотвращения потенциальных конфликтных ситуаций с помощью технологии автоматического определения опасных сближений и уклонения БЛА в воздухе (так называемый сервис Detect And Avoid – DAA).
Модуль 3 обеспечивает передачу на наземный комплекс средств наблюдения за воздушным движением БЛА посредством данных телеметрии БЛА, полученных от автопилота БЛА посредством модуля 2; данных о координатах БЛА, полученных от навигационного спутникового приемника GNSS из модуля 4; идентификационные метки БЛА, полученные от модуля 6.
Модуль 3 включает в свой состав по крайней мере одно из следующих средств обмена данными: бортовой транспондер, модуль связи Iridium или модуль связи VDL-4.
Модуль 3 обеспечивает прием от наземных служб управления воздушным движением команд оперативных поправок к описанию зон геофенсинга/геокейджинга, триггерную информацию об активации зон с ограниченным режимом полётов, а также команд экстренной посадки и передачу их в модуль 1.
Модуль 5 реализует прием и передачу данных автоматического зависимого наблюдения вещательного типа (АЗН-В) стандартов 1090 ЕS и VDL-4 для других воздушных судов и службы управления воздушным движением.
Применение модуля 5 обеспечивает совместимость БЛА с оборудованием, применяемым пилотируемыми воздушными судами, и гарантирует наблюдаемость БЛА пилотируемыми летательными аппаратами и наоборот.
Модуль 7 обеспечивает хранение данных телеметрии БЛА, полученной посредством модуля 2 от автопилота БЛА.
Представленная архитектура УБМ АН решает задачи:
- идентификации БЛА другими участниками воздушного движения и наземными службами управления воздушным движением;
- получение другими участниками воздушного движения, включая пилотируемые воздушные суда, и наземными службами управления воздушным движением данных о параметрах полета БЛА;
- получение БЛА команд управления от наземных служб управления воздушным движением;
- получение БЛА данных о параметрах полета других участников воздушного движения по каналам АЗН-В.
Изобретение относится к области систем управления воздушным движением беспилотных летательных аппаратов (БЛА). Унифицированный бортовой модуль авиационного наблюдения БЛА содержит вычислительный управляющий навигационный модуль, модуль связи с автопилотом БЛА, модуль обмена данными, навигационный модуль, бортовой модуль приема/передачи данных автоматического зависимого наблюдения вещательного типа (АЗН-В) стандартов 1090 ЕS и VDL-4 для других воздушных судов и службы управления воздушным движением, модуль с идентификационными метками БЛА Remote ID, модуль запоминающего устройства. При этом модуль обмена данными включает в свой состав одно из средств обмена данными - бортовой транспондер, и/или модуль связи Iridium, и/или модуль связи VDL-4. Техническим результатом заявленного изобретения является расширение функциональных возможностей бортового модуля БЛА за счет включения в состав модуля, позволяющего получать данные о параметрах полета других участников воздушного движения и передавать им данные своего полета с целью повышения безопасности полета. 1 з.п. ф-лы, 1 ил.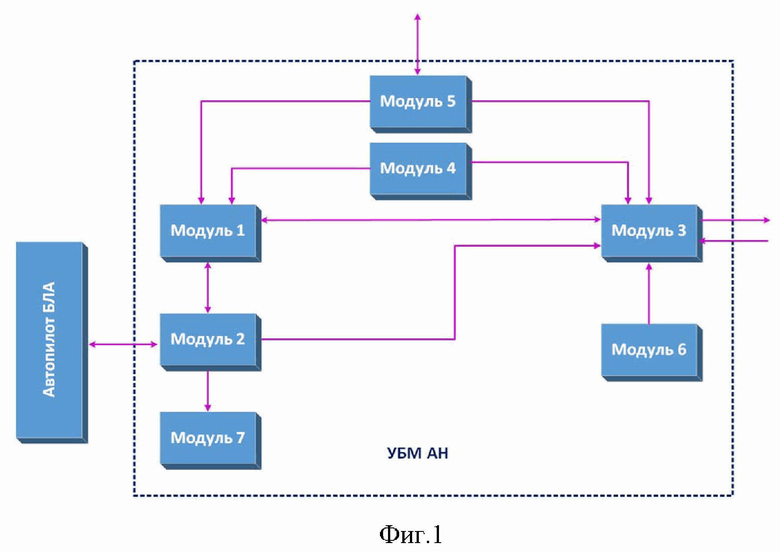
1. Унифицированный бортовой модуль авиационного наблюдения беспилотных летательных аппаратов, содержащий вычислительный управляющий навигационный модуль (1), формирующий команды управления БЛА и передающий их в автопилот БЛА, модуль (2) связи с автопилотом БЛА, с помощью которого передаются команды управления БЛА, сформированные на предыдущем модуле (1), и данные телеметрии, полученные от автопилота БЛА, навигационный модуль (4), содержащий навигационный спутниковый приемник GNSS и передающий данные о координатах БЛА в модуль (1) и модуль 3 обмена данными, модуль 6 с идентификационными метками БЛА, передающий данные в модуль (3) обмена данными, модуль (7) запоминающего устройства, обеспечивающий хранение данных телеметрии БЛА, полученных от автопилота БЛА через модуль (2), бортовой модуль 5 приема/передачи данных автоматического зависимого наблюдения вещательного типа АЗН-В стандартов 1090 ЕS и VDL-4 для других воздушных судов и службы управления воздушным движением, модуль (3) обмена данными, обеспечивающий передачу на наземный комплекс средств наблюдения за воздушным движением БЛА посредством данных телеметрии БЛА, полученных от автопилота БЛА через модуль (2), данных о координатах БЛА, полученных от модуля (4), идентификационные метки БЛА, полученные от модуля (6), данных, полученных от модуля (5), и обеспечивающий прием и передачу на модуль (1) от наземных служб команд оперативных поправок к описанию зон полёта, а также команд экстренной посадки.
2. Унифицированный бортовой модуль авиационного наблюдения беспилотных летательных аппаратов по п.1, в котором модуль (3) включает в свой состав по крайней мере одно из средств обмена данными - бортовой транспондер, и/или модуль связи Iridium, и/или модуль связи VDL-4.
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
| Комплекс бортового оборудования вертолетов и самолетов авиации общего назначения | 2016 |
|
RU2640076C2 |
| СПОСОБ РЕГИСТРАЦИИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2595064C1 |
| Малогабаритная бортовая аппаратура формирования и передачи телеметрической информации беспилотного летательного аппарата | 2018 |
|
RU2676387C1 |
| US 0010026323 B2, 17.07.2018 | |||
| US 20100256909 A1, 07.10.2010. | |||

