Изобретение относится к следящим электрогидравлическим приводам и может быть использовано в электрогидравлических системах в качестве автономного рулевого привода управления полетом летательного аппарата.
Известен автономный электрогидравлический привод с комбинированным управлением скорости выходного звена, который содержит: электронные блоки управляющего микроконтроллера и усилителя-инвертора, бесколлекторный электродвигатель постоянного тока, нерегулируемый насос, гидроцилиндр, гидрокомпенсатор, клапаны подпитки, предохранительные клапаны, фильтр, датчик положения штока гидроцилиндра, электрогидравлический клапан реверса с линейным электродвигателем, датчик положения золотника клапана реверса и датчики перепада давления на входе и выходе клапана реверса. (патент RU №2305210/C2, МПК F15B 9/09, опубл. 27.08.2007)
Недостатком аналога является нестабильность выходных характеристик работы автономного электрогидравлического привода.
Наиболее близким по технической сущности является автономный электрогидравлический привод электрогидростатического типа фирмы Liebherr-Aerospace Lindenberg, содержащий блок электроники электродвигателя и клапана кольцевания, бесколлекторный двигатель постоянного тока, реверсивный нерегулируемый насос, гидроцилиндр, и вспомогательные элементы: газогидравлический гидрокомпенсатор, антикавитационные клапаны насоса, предохранительные клапаны, электрогидравлический клапан кольцевания, антикавитационные клапаны цилиндра, фильтр с его предохранительным клапаном, клапан безопасности, позиционная обратная связь. (КОНСТАНТИНОВ Г.С. ПЕРСПЕКТИВЫ И ПРОБЛЕМЫ СОЗДАНИЯ РУЛЕВЫХ ПРИВОДОВ С ЭЛЕКТРИЧЕСКИМ ЭНЕРГОПИТАНИЕМ / Г.С. КОНСТАНТИНОВ, В.М. КУВШИНОВ, И.П. КУЗНЕЦОВ, А.А. ПАРШИН, П.Г. РЕДЬКО, А.И. СТЕБЛИНКИН, Л.В. ХАЛЕЦКИЙ // ВЕСТНИК МОСКОВСКОГО АВИАЦИОННОГО ИНСТИТУТА: статья в журнале - научная статья, Москва, 2013 года. Москва: Московский авиационный институт (национальный исследовательский университет), 2013 года. С. 149-160. - EDN QCAWJZ, ISSN: 0869-6101.).
Недостатком прототипа являются нестабильные динамические характеристики из-за потребления мощности насосной установки, не соответствующей нагрузкам нестационарного или случайного характера, действующим на исполнительный гидродвигатель рулевого привода при его работе.
Задачей изобретения является повышение надежности автономного электрогидравлического рулевого привода.
Технический результат изобретения - обеспечение стабильных выходных характеристик автономного электрогидравлического рулевого привода за счет регулирования мощности насоса.
Поставленная задача решается, а технический результат достигается тем, что автономный электрогидравлический рулевой привод, состоящий из приводного электродвигателя, соединённого через вал с насосом и соединённого через усилитель с управляющим микроконтроллером, на вход которого подается внешний сигнал управления, блока подпитки, содержащего пневмогидроаккумулятор, обратные и предохранительные клапаны, электрогидрораспределителя, управляемого микроконтроллером, исполнительного гидродвигателя, оснащенного датчиком перемещения, выход которого соединен с управляющим микроконтроллером, в отличие от прототипа, содержит регулятор мощности насоса, который включает в себя первый и второй гидроцилиндры управления характерным рабочим объемом насоса, причем первый гидроцилиндр с помощью пружин связан с коромыслом и далее с многопозиционным распределителем, а второй гидроцилиндр соединен через дроссель также с многопозиционным распределителем, который в свою очередь связан через клапан с исполнительным гидродвигателем.
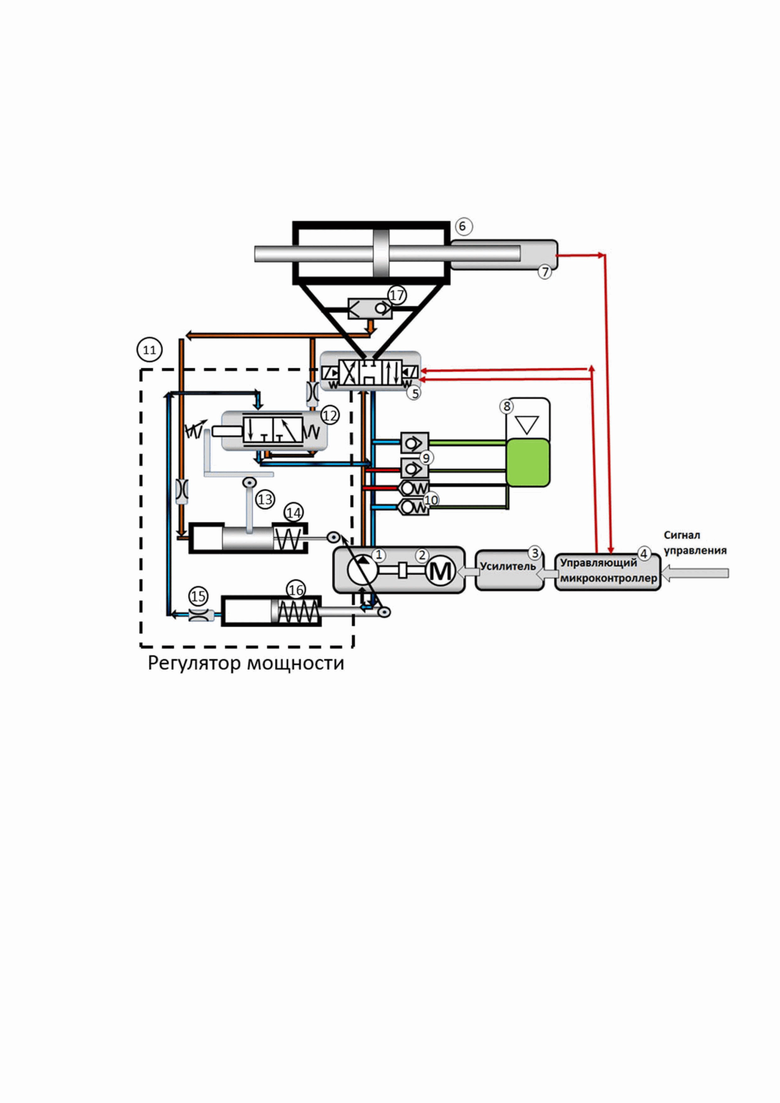
Существо изобретения поясняется чертежом, на котором изображена принципиальная схема автономного электрогидравлического рулевого привода с регулятором мощности.
Автономный электрогидравлический рулевой привод содержит насос 1 с приводным электродвигателем 2, управляемым усилителем 3 и управляющим микроконтроллером 4, при этом насос 1 обеспечивает подачу рабочей жидкости к электрогидравлическому распределителю 5, подключенному к исполнительному гидродвигателю 6, оснащенному датчиком перемещения 7. Рулевой привод также содержит блок подпитки, состоящий из пневмогидроаккумулятора 8, обратных 9 и предохранительных 10 клапанов, а также регулятор мощности 11, включающий в себя многопозиционный распределитель 12, который связан пружинами и механическим креплением с коромыслом 13, закрепленным на первом гидроцилиндре 14, а также соединен посредством дросселя 15 со вторым гидроцилиндром 16. Рабочая полость исполнительного гидродвигателя 6 соединена с регулятором мощности 11 посредством клапана 17.
Автономный электрогидравлический рулевой привод с регулятором мощности работает следующим образом.
Регулирование мощности насоса 1 осуществляется бесступенчатым изменением его производительности пропорционально давлению нагрузки случайного или нестационарного характера на исполнительном гидродвигателе 6, подаваемому к первому и второму гидроцилиндрам 14 и 16 регулятора мощности 11, обеспечивающего управление характерным рабочим объемом насоса 1.
Блок подпитки, состоящий из обратных 9 и предохранительных 10 клапанов, соединяющихся с линиями нагнетания и слива и пневмогидроаккумулятором 8, обеспечивает величину давления в системе рулевого привода.
Во время работы автономного электрогидравлического рулевого привода происходит смещение электрогидроавлического распределителя 5 по электронным командам, приходящим на его электромагнит. Эти команды отправляются с управляющего микроконтроллера 4, получающего внешние сигналы управления, значения величины смещения электрогидроавлического распределителя 5 и значения с датчика перемещения 7. Все сигналы суммируются, управляющий микроконтроллер 4 осуществляет управление электрогидравлическим распределителем 5 и подает сигнал на усилитель 3, который в свою очередь управляет приводным электродвигателем 2. Таким образом регулируются обороты на приводном электродвигателе 2.
Оптимальное потребление мощности насосом 1 от приводного электродвигателя 2 обеспечивается при регулировании работы насоса 1 по гиперболической зависимости. Рабочее давление в полости исполнительного гидродвигателя 6, соответствующее действительным нагрузкам, передается через клапан 17 и первый гидроцилиндр 14 на коромысло 13 и на многопозиционный распределитель 12, и далее на насос 1. Противодействующей силой пружины, настраиваемой извне, задается уровень мощности. Если сила действия давления превышает силу пружины, то поршень первого гидроцилиндра 14 плавно смещается в сторону уменьшения рабочего объема насоса 1. При этом увеличивается действующая длина рычага на коромысло 13, способствующая перемещению многопозиционного распределителя 12, соединенного с поршневой полостью второго гидроцилиндра 15 и с линией слива. Это в свою очередь позволяет бесступенчато изменять рабочий объем насоса 1 пропорционально давлению нагрузки случайного или нестационарного характера на исполнительном гидродвигателе 6, контролируя обеспечение постоянного значения произведения величины давления за насосом 1 и характерного объема насоса 1, что позволяет регулятору мощности 11 поддерживать постоянство потребляемого момента и потребляемой мощности.
Таким образом, заявленный автономный электрогидравлический рулевой привод самолета обеспечивает оптимальное потребление мощности насоса в зависимости от требуемых действительных нагрузок на исполнительном гидродвигателе. Благодаря этому обеспечиваются стабильные выходные характеристики рулевого привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД С ДОПОЛНИТЕЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ ПО ДИНАМИЧЕСКОМУ ДАВЛЕНИЮ | 2024 |
|
RU2826237C1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД С ДОПОЛНИТЕЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ ПО СКОРОСТИ ГИДРОДВИГАТЕЛЯ | 2024 |
|
RU2826275C1 |
| Блок передачи мощности гидравлической системы самолета | 2023 |
|
RU2803904C1 |
| ГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО СОЛНЕЧНОГО ТРЕКЕРА | 2021 |
|
RU2769457C1 |
| РЕГУЛИРУЕМЫЙ БЛОК ПЕРЕДАЧИ МОЩНОСТИ ГИДРАВЛИЧЕСКОЙ СИСТЕМЫ САМОЛЕТА | 2023 |
|
RU2814642C1 |
| РЕГУЛИРУЕМЫЙ БЛОК ПЕРЕДАЧИ МОЩНОСТИ ГИДРАВЛИЧЕСКОЙ СИСТЕМЫ САМОЛЕТА | 2023 |
|
RU2814901C1 |
| ГИДРОПРИВОД МНОГОВИНТОВОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2808657C1 |
| РЕГУЛИРУЕМОЕ ГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО СОЛНЕЧНОГО ТРЕКЕРА | 2023 |
|
RU2803919C1 |
| РЕГУЛИРУЕМЫЙ БЛОК ПЕРЕДАЧИ МОЩНОСТИ ГИДРАВЛИЧЕСКОЙ СИСТЕМЫ САМОЛЕТА | 2023 |
|
RU2814840C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
Изобретение относится к следящим электрогидравлическим приводам и может быть использовано в электрогидравлических системах в качестве автономного рулевого привода управления полетом летательного аппарата. Технический результат: обеспечение стабильных выходных характеристик автономного электрогидравлического рулевого привода за счет регулирования мощности насоса. Сущность изобретения: автономный электрогидравлический рулевой привод, состоящий из приводного электродвигателя, соединенного через вал с насосом и соединенного с усилителем и управляющим микроконтроллером, на вход которого подается внешний сигнал управления, блока подпитки, содержащего пневмогидроаккумулятор, обратные и предохранительные клапаны, электрогидрораспределителя, управляемого микроконтроллером, исполнительного гидродвигателя, оснащенного датчиком перемещения, выход которого соединен с управляющим микроконтроллером, согласно изобретению содержит регулятор мощности насоса, который включает в себя первый и второй гидроцилиндры управления характерным рабочим объемом насоса, причем первый гидроцилиндр с помощью пружин связан с коромыслом и далее с многопозиционным распределителем, а второй гидроцилиндр соединен через дроссель также с многопозиционным распределителем, который в свою очередь связан через клапан с исполнительным гидродвигателем. 1 ил.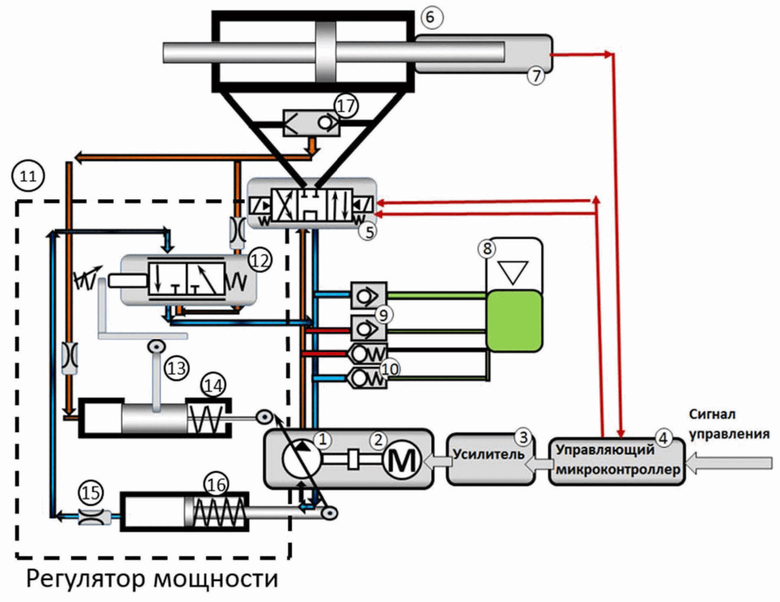
Автономный электрогидравлический рулевой привод, состоящий из приводного электродвигателя, соединённого через вал с насосом и соединённого через усилитель с управляющим микроконтроллером, на вход которого подается внешний сигнал управления, блока подпитки, содержащего пневмогидроаккумулятор, обратные и предохранительные клапаны, электрогидрораспределителя, управляемого микроконтроллером, исполнительного гидродвигателя, оснащенного датчиком перемещения, выход которого соединен с управляющим микроконтроллером, отличающийся тем, что содержит регулятор мощности насоса, который включает в себя первый и второй гидроцилиндры управления характерным рабочим объемом насоса, причем первый гидроцилиндр с помощью пружин связан с коромыслом и далее с многопозиционным распределителем, а второй гидроцилиндр соединен через дроссель также с многопозиционным распределителем, который в свою очередь связан через клапан с исполнительным гидродвигателем.
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ СКОРОСТИ ВЫХОДНОГО ЗВЕНА | 2005 |
|
RU2305210C2 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ СКОРОСТИ ВЫХОДНОГО ЗВЕНА | 2005 |
|
RU2305211C2 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С КОМБИНИРОВАННЫМ РЕГУЛИРОВАНИЕМ СКОРОСТИ ВЫХОДНОГО ЗВЕНА И КЛАПАНОМ ДЕМПФИРОВАНИЯ | 2011 |
|
RU2483978C2 |
| DE 3640082 A1, 01.06.1988 | |||
| Питатель для сыпучих материалов | 1972 |
|
SU477079A1 |

