Перекрестная ссылка на родственные заявки
Настоящая заявка испрашивает преимущества приоритета в отношении предварительной патентной заявки США № 62/953,305, поданной 24 декабря 2019 г. и озаглавленной “Terrestrial and Non-Terrestrial Communication Systems, Apparatuses, and Methods”, и патентной заявки США № 16/864,922, поданной 1 мая 2020 г. и озаглавленной “Terrestrial and Non-Terrestrial Communication Systems, Apparatuses, and Methods”, содержание которых включено сюда посредством ссылки.
Область техники, к которой относится изобретение
Настоящее раскрытие, в целом, относится к системам беспроводной связи и, в частных вариантах осуществления, к системам связи, которые могут содержать космическое оборудование, наземное оборудование или и то, и другое.
Уровень изобретения
Существующие в настоящее время сотовые сети в значительной степени основаны на наземных системах связи с наземным оборудованием связи. Это ограничивает гибкость сотовой связи, поскольку может оказаться, что наземное оборудование связи трудно устанавливать в отдалённых районах и трудно передислоцировать в областях с высоким спросом.
Сущность изобретения
В соответствии с одним подходом настоящего раскрытия, обеспечивается способ, содержащий оборудование пользователя (user equipment, UE), передающее или принимающее в беспроводной сети первую беспроводную передачу к первой передающей и приемной точке (transmit and receive point, TRP) или от нее, причем первая TRP является первым типом TRP. Способ дополнительно содержит передачу или прием UE в беспроводной сети второй беспроводной передачи ко второй TRP или от нее, причем вторая TRP является вторым типом TRP и представляет собой космическую TRP.
При предыдущем подходе, передача или прием первой беспроводной передачи к первой TRP или от нее содержит передачу или прием первой беспроводной передачи к наземной TRP или от нее.
При любом из предшествующих подходов передача или прием первой беспроводной передачи к первой TRP или от нее содержит передачу или прием первой беспроводной передачи к дополнительной космической TRP или от нее.
При любом из предшествующих подходов первый тип TPR и второй тип TPR реализуются на различных уровнях беспроводной сети. Каждый из различных уровней беспроводной сети дополнительно содержит соответствующий диапазон высот.
При любом из предшествующих подходов передача или прием первой беспроводной передачи к первой TRP или от нее содержит прием первой беспроводной передачи от первой TRP; передача или прием второй беспроводной передачи ко второй TRP или от нее содержит прием второй беспроводной передачи от второй TRP; и первая беспроводная передача и вторая беспроводная передача содержат одни и те же или разные пакеты данных.
При любом из предшествующих подходов передача или прием второй беспроводной передачи содержит прием второй беспроводной передачи. В этих вариантах осуществления способ дополнительно содержит UE, определяющее второй тип TRP, основываясь на второй беспроводной передаче.
В соответствии с другим подходом настоящего раскрытия, обеспечивается способ, содержащий первую TRP, передающую или принимающую первую беспроводную передачу к UE или от нее в беспроводной сети, причем первая TRP является первым типом TRP и является космической TRP. Способ дополнительно содержит первую TRP, передающую или принимающую вторую беспроводную передачу ко второй TRP или от нее в беспроводной сети, причем вторая TRP является вторым типом TRP.
При предшествующем подходе передача или прием первой беспроводной передачи содержит прием первой беспроводной передачи от UE; передача или прием второй беспроводной передачи содержит передачу второй беспроводной передачи ко второй TRP; и первая беспроводная передача и вторая беспроводная передача содержат одни и те же или разные пакеты данных.
При любом из предшествующих подходов передача или прием второй беспроводной передачи ко второй TRP или от нее содержит передачу или прием беспроводной транспортной передачи ко второй TRP или от нее.
При любом из предшествующих подходов первая беспроводная передача и вторая беспроводная передача содержат одни и те же или разные пакеты данных и первая беспроводная передача и вторая беспроводная передача предназначены для одних и тех же или разных услуг или применений.
В соответствии с дополнительным подходом настоящего раскрытия, обеспечивается способ, содержащий определение конфигурации множества TRP в системе связи, причем множество TRP содержат наземные TRP и космические TRP. Способ дополнительно содержит передачу сигнализации по меньшей мере одной TRP из множества TRP, причем сигнализация содержит команды по реализации конфигурации множества TRP.
При предшествующем подходе определение конфигурации множества TRP содержит определение множества соединений для UE, причем каждое из множества соединений относится к разному типу TRP.
При любом из предшествующих подходов определение конфигурации для множества TRP содержит определение релейного соединения, причем космическая TRP является релейным узлом в релейном соединении.
При любом из предшествующих подходов определение конфигурации для множества TRP содержит определение конфигурации летательной распределенной антенны, причем конфигурация летательной распределенной антенны содержит множество летательных TRP и каждая из них имеет соединение с UE или с наземной TRP.
При любом из предшествующих подходов определение конфигурации множества TRP содержит определение беспроводного соединения транспортного канала для множества TRP. Беспроводной транспортный канал может использовать временные, частотные и пространственные ресурсы совместно с каналом доступа, который соединяется с UE.
При любом из предшествующих подходов определение конфигурации для множества TRP содержит определение передачи управления соединением по меньшей мере для одной TRP.
При любом из предшествующих подходов космическая TRP является летательной TRP, и команды содержат команду для летательной TRP по перемещению в новое местоположение.
В предшествующем подходе команды содержат команду по меньшей мере для одной TRP по включению или выключению соединения.
В соответствии с еще одним другим подходом настоящего раскрытия, обеспечивается UE, содержащее приемопередатчик для выполнения любого раскрытого здесь способа.
В соответствии с еще одним другим подходом настоящего раскрытия обеспечивается TRP, содержащая приемопередатчик для выполнения любого раскрытого здесь способа.
В соответствии с другим подходом настоящего раскрытия, обеспечивается устройство, содержащее процессор, для определения конфигурации множества TRP в системе связи, причем множество TRP содержат наземную TRP и космическую TRP; и передатчик для передачи сигнализации по меньшей мере одной TRP из множества TRP, причем сигнализация содержит команды для реализации конфигурации множества TRP.
Краткое описание чертежей
Для более полного понимания представленных вариантов осуществления и их преимуществ теперь посредством примеров будет делаться ссылка на последующие описания, рассматриваемые в сочетании с сопроводительными чертежами, на которых:
фиг. 1A-1F - система связи, соответствующая некоторым вариантам осуществления настоящего раскрытия;
фиг. 2 - система связи, в которой могут реализовываться варианты осуществления раскрытия;
фиг. 3A, 3B и 3C - блок-схемы примерного оборудования пользователя (user equipment, UE), наземной передающей и приемной точки (transmission and receive point, TRP) и космической TRP, соответственно, соответствующие вариантам осуществления настоящего раскрытия;
фиг. 4 - блок-схема диспетчера радиоинтерфейса для конфигурации программно конфигурируемого радиоинтерфейса в соответствии с вариантом осуществления настоящего раскрытия;
фиг. 5-10 - системы связи, соответствующие вариантам осуществления настоящего раскрытия;
фиг. 11 - блок-схема последовательности выполнения операций способа, выполняемого UE в соответствии с вариантом осуществления настоящего раскрытия;
фиг. 12 - блок-схема последовательности выполнения операций способа, выполняемого базовой станцией в соответствии с вариантом осуществления настоящего раскрытия;
фиг. 13 - блок-схема последовательности выполнения операций способа, выполняемого UE в соответствии с другим вариантом осуществления настоящего раскрытия;
фиг. 14 - блок-схема последовательности выполнения операций способа, выполняемого TRP в соответствии с вариантом осуществления настоящего раскрытия; и
фиг. 15 - блок-схема последовательности выполнения операций способа, выполняемого центральным узлом в соответствии с вариантом осуществления настоящего раскрытия.
Подробное описание иллюстративных вариантов осуществления
Для иллюстративных целей здесь далее конкретные примерные варианты осуществления будут объяснены более подробно в сочетании с чертежами.
Варианты осуществления, изложенные здесь, представляют информацию, достаточную для практической реализации заявленного предмета изобретения и поясняют способы практической реализации такого предмета изобретения. После прочтения последующего описания в свете сопроводительных чертежей специалисты в данной области техники должны понять концепции заявленного предмета изобретения и согласиться с применениями этих концепций, конкретно здесь не адресованных. Следует понимать, что эти концепции и применения попадают в рамки объема защиты раскрытия и сопроводительной формулы изобретения.
Кроме того, следует понимать, что любой модуль, компонент или устройство, раскрытые здесь, которые исполняют команды, могут содержать или как-либо иначе иметь доступ к считываемому компьютером/процессором носителю памяти долговременного использования или к носителю для хранения информации, такой как считываемые компьютером/процессором команды, структуры данных, программные модули и/или другие данные. Неисчерпывающий список примеров считываемых компьютером/процессором носителей долговременного использования содержит магнитные кассеты, магнитную ленту, запоминающее устройство на магнитных дисках или другие магнитные накопительные устройства, оптические диски, такие как постоянная память на компакт-дисках (compact disc read-only memory, CD-ROM), цифровые видеодиски или цифровые универсальные диски (то есть, digital versatile disc, DVD), диск Blu-ray Disk™ или другие носители для оптического хранения, энергозависимые и энергонезависимые, съемные и несъемные носители, реализуемые при любом способе или технологии, оперативная память (random-access memory, RAM), постоянную память (read-only memory, ROM), электрически стираемое программируемое постоянное запоминающее устройство (electrically erasable programmable read-only memory EEPROM), флэш-память или другие технологии памяти. Любые такие считываемые компьютером/процессором носители памяти долговременного использования могут быть частью устройства или доступны или присоединяемы к нему. Считываемые компьютером/процессором исполняемые команды для реализации приложения или модуля, описанные здесь, могут запоминаться или как-либо иначе сохраняться таким считываемым компьютером/процессором носителем долговременного использования.
Настоящее раскрытие относится, в частности, к космическим системам связи и тому, как они могут интегрироваться с наземными системами связи. Хотя традиционная беспроводная технология сотовой связи (например, технология долговременного развития (Long Term Evolution, LTE) и технология 5G New Radio (NR)) концентрируют внимание на наземных системах связи, для улучшения беспроводной связи существует возможность реализовывать космические системы связи. Космические системы связи содержат оборудование связи, которое не является наземным и может использоваться для обеспечения беспроводного доступа к областям, которые трудны для обслуживания, крайне дороги для множества пользователей, которые могут обслуживаться в любой момент времени, используя наземные системы связи, или, возможно, обеспечивать дополнительную производительность наземных систем связи в течение некоторого промежутка времени.
Некоторые описанные здесь варианты осуществления относятся к эффективной реализации космических систем связи. Эти варианты осуществления могут представлять собой более гибкую систему связи с расширенным диапазоном покрытия беспроводной связью и с улучшенным качеством обслуживания по сравнению с традиционными системами связи.
На фиг. 1A-1F представлены схемы, показывающие систему 10 связи, соответствующую некоторым вариантам осуществления. Система 10 связи содержит как наземную систему 30 связи, так и космическую систему 40 связи. Наземная система 30 связи и космическая система 40 связи могут считаться подсистемами системы 10 связи. Наземная система 30 связи содержит многочисленные передающие и приемные точки (transmit and receive point, TRP) 14a-14b. Космическая система 40 связи содержит многочисленные космические TRP 16, 18 и 20.
TRP может также упоминаться как сетевой узел или базовая станция. В целом, и как подробно обсуждается здесь в другом месте, TRP может обеспечивать беспроводное обслуживание оборудования пользователя (user equipment, UE).
Наземная TRP является TRP, связанной с землей. Например, наземная TRP мог быть смонтирована на здании или на башне. Наземная система связи может также упоминаться как система связи, расположенная на суше, или система связи наземного базирования, хотя наземная система связи может также или вместо этого быть реализована на воде или в воде.
Космическая TRP является любой TRP, не связанной с землей. Летательная TRP является примером космической TRP. Летательная TRP может быть реализована, используя оборудование связи, поддерживаемое или переносимое летательным устройством. Неограничивающими примерами летательных устройств являются бортовые платформы (такие как, например, дирижабль или воздушное судно), аэростаты, квадрокоптеры и другие воздушные транспортные средства. В некоторых реализациях летательная TRP может поддерживаться или переноситься беспилотной аэросистемой (unmanned aerial system, UAS) или беспилотным летательным аппаратом (unmanned aerial vehicle, UAV), таким как дрон. Летательная TRP может быть подвижной или мобильной TRP, которая может быть гибко развернута в различных местах, чтобы удовлетворить сетевые потребности. Спутниковая TRP является другим примером космической TRP. Спутниковая TRP может быть реализована, используя оборудование связи, поддерживаемое или переносимое спутником. Спутниковая TRP может также упоминаться как орбитальная TRP.
Космические TRP 16, 18 являются примерами летательных TRP. Более конкретно, космическая TRP 16 показана как квадрокоптер TRP (то есть, оборудование связи, переносимое квадрокоптером), а космическая TRP 18 показана как бортовая TRP (то есть, оборудование связи, которое несет бортовая платформа). Космическая TRP 20 показана как спутниковая TRP (то есть, оборудование связи, которое несет спутник).
Высота или высота над поверхностью Земли, на которой работает космическая TRP, здесь не ограничивается. Летательная TRP может быть реализована на большой, средней или низкой высотах. Например, рабочая высота бортовой платформы TRP или аэростата TRP может быть между 8 и 50 км. Рабочая высота квадрокоптера TRP, например, может быть между несколькими метрами и несколькими километрами, например, 5 км. В некоторых вариантах осуществления высота летательной TRP различается в зависимости потребностей сети. Орбита спутниковой TRP является определенной реализацией и может быть, например, низкоорбитальной земной орбитой, очень низкоорбитальной земной орбитой, среднеорбитальной земной орбитой, высокоорбитальной земной орбитой или геосинхронной земной орбитой. Геостационарная земная орбита является круговой орбитой с высотой 35 786 км над экватором Земли и следующей в направлении вращения Земли. Объект на такой орбите имеет период обращения, равный периоду вращения Земли и, таким образом, для наземных наблюдателей кажется неподвижным в фиксированном положении на небе. Низкая околоземная орбита является орбитой вокруг Земли с высотой между 500 км (период обращения приблизительно 88 минут) и 2 000 км (период обращения приблизительно 127 минут). Средняя околоземная орбита является областью пространства вокруг Земли выше низкой околоземной орбиты и ниже геостационарной околоземной орбиты. Высокая околоземная орбита является любой орбитой, которая выше геостационарной орбиты. В целом, орбита спутниковой TRP здесь не ограничивается.
Так как космические TRP могут располагаться на различных высотах, в дополнение к расположению при различных долготах и широтах, космическая система связи может формировать трехмерную (3D) систему связи. Например, квадрокоптерная TRP может быть реализована на высоте 100 м выше поверхности Земли, бортовая платформа TRP может быть реализована на высоте 8 и 50 км над поверхностью Земли, и спутниковая TRP может быть реализована на высоте 10 000 км выше поверхности Земли. Трехмерная система беспроводной связи может расширить покрытие по сравнению с наземной системой связи и улучшить качество обслуживания пользователей. Однако, конфигурация и проект трехмерной системы беспроводной связи могут также быть более сложными.
Космические TRP могут быть реализованы для местностей, труднодоступных для обслуживания, используя наземную систему связи. Например, UE может находиться в океане, пустыне, горах или другом месте, в котором трудно обеспечить беспроводное покрытие при использовании наземной TRP. Космические TRP не связаны с землей и поэтому способны легко обеспечить беспроводной доступ к UE.
Космические TRP могут быть реализованы, чтобы обеспечивать дополнительную временную производительность в области, в которой много пользователей собираются вместе на некоторый период времени, такой как спортивное мероприятие, концерт, фестиваль или другое событие, которое привлекает большую толпу. Дополнительные пользователи могут превысить производительность, обычную для этой области.
Для быстрого аварийного восстановления связи при стихийных бедствиях вместо этого могут быть развернуты космические TRP. Например, стихийное бедствие в определенной области может вызвать напряжение в работе системы беспроводной связи. Некоторые наземные TRP могут быть повреждены стихийным бедствием. Кроме того, сетевые потребности во время или после стихийного бедствия могут возрастать, поскольку пользователи пытаются войти в контакт для оказания помощи или общения с родными. Космические TRP могут быть быстро транспортированы в область стихийного бедствия, чтобы улучшить беспроводную связь в области.
Система 10 связи дополнительно содержит наземное оборудование 12 пользователя (UE) и космическое UE 22, которые могут считаться или не считаться частью наземной системы 40 связи и космической системы 30 связи, соответственно. Наземное UE связано с землей. Например, наземное UE может быть UE, которое управляется пользователем, находящимся на земле. Существует много различных типов наземных UE, в том числе (но не ограничиваясь только этим), сотовые телефоны, датчики, автомобили, грузовики, автобусы и поезда. Напротив, космическое UE не связывается с землей. Например, космическое UE может быть реализовано, используя летательное устройство или спутник. Космическое UE, которое реализуется, используя летательное устройство, упоминается как летательное UE, тогда как космическое UE, которое реализуется, используя спутник, упоминается как спутниковое UE. Хотя на фиг. 1A космическое UE 22 изображается как летательное UE, реализуемое используя квадрокоптер, это только пример. Летательное UE может вместо этого быть реализовано, используя бортовую платформу или аэростат. В некоторых реализациях космическое UE 22 является дроном, который, например, используется для наблюдения в зоне бедствия.
Система 10 связи может предоставлять UE широкий диапазон услуг связи посредством объединенной работы множества различных типов TRP. Эти различные типы TRP могут содержать любые раскрытые здесь наземные и/или космические TRP. В космической системе связи могут существовать космические TRP различного типа, в том числе, спутниковые TRP, бортовые TRP, TRP на аэростатах и квадрокоптерные TRP. В целом, TRP различных типов в системе связи обладают различными функциями и/или возможностями. Например, TRP различных типов могут поддерживать различные скорости передачи данных связи. Скорость передачи данных связи, обеспечиваемая квадрокоптерными TRP, более высокая, чем скорость передачи данных связи, обеспечиваемая бортовыми TRP, TRP на аэростате и спутниковыми TRP. Скорость передачи данных связи, обеспечиваемая бортовыми TRP и TRP на аэростате более высокая, чем скорость передачи данных связи, обеспечиваемая спутниковыми TRP. Таким образом, спутниковые TRP могут обеспечивать низкую скорость передачи данных связи для UE, например, до 1 Мбит/с. С другой стороны, бортовые TRP и TRP на аэростатах могут обеспечивать низкую и среднюю скорости передачи данных связи для UE, например, до 10 Мбит/с. Квадрокоптерные TRP при определенных обстоятельствах могут обеспечивать высокую скорость передачи данных связи для UE, например, 100 Мбит/с и выше. Заметим, что термины «низкая», «средняя» и «высокая» в этом раскрытии являются примерными объяснениями, чтобы показать относительную разницу между различными типами TRP. Конкретные значения скоростей передачи данных, присваиваемые низкой, средней и высокой скоростям передачи данных, являются только примерами в этом раскрытии и не ограничивается приведенными примерами. В некоторых примерах некоторые типы TRP могут действовать как антенны или удаленные радиоблоки (remote radio unit, RRU), а некоторые типы TRP могут действовать как базовые станции, имеющие более сложные функции и способные координировать другие TRP типа RRU.
В некоторых вариантах осуществления в системе связи могут использоваться TRP различного типа, чтобы предоставлять UE различные типы услуг. Например, спутниковые TRP, бортовые TRP и TRP на аэростатах могут использоваться для обнаружения и контроля датчиков в широкой области, в то время как квадрокоптерные TRP могут использоваться для контроля трафика. В другом примере спутниковая TRP используется для предоставления речевых услуг в широкой области, в то время как квадрокоптерная TRP используется для обеспечения услуг высокоскоростной передачи данных в случае затруднительных ситуаций. Различные типы TRP могут содержаться (то есть, устанавливаться, активироваться или содержаться), выключаться (то есть, удаляться, деактивироваться или выключаться) и/или конфигурироваться, основываясь на потребности в услугах.
В некоторых вариантах осуществления спутниковые TRP являются отдельным и особым типом TRP. В некоторых вариантах осуществления летательные TRP и наземные TRP являются TRP одного и того же типа. Однако, это не всегда может иметь место. Летательные TRP вместо этого могут рассматриваться как особый тип TRP, который отличается от наземных TRP. Летательные TRP в некоторых вариантах осуществления могут также содержать множество TRP других типов. Например, бортовые TRP, TRP на аэростатах, квадрокоптерные TRP и/или TRP на дронах могут или не могут классифицироваться как различные типы TRP. Летательные TRP, которые реализуются, используя один и тот же тип летательного устройства, но имеют различные возможности или функции связи, могут или не могут классифицироваться как различные типы TRP.
В некоторых вариантах осуществления конкретная TRP способна функционировать как более чем один тип TRP. Например, TRP может переключаться между различными типами TRP. TRP может активно или динамично переконфигурироваться сетью как один из типов TRP, который может изменяться по мере изменений требований сети. TRP может также являться UE или вместо этого переключаться, чтобы действовать как UE.
Обращаясь снова к системе 10 связи, могут быть определены многочисленные различные типы TRP. Например, наземные TRP 14a-14b могут быть первым типом TRP, летательная TRP 16 может быть вторым типом TRP, летательная TRP 18 может быть третьим типом TRP и спутниковая TRP 20 может быть четвертым типом TRP. В некоторых реализациях, одна или более TRP в системе 10 связи способны динамично переключаться между различными типами TRP.
В некоторых вариантах осуществления различные типы TRP организуются в различные подсистемы в системе связи. Например, в системе 10 связи могут существовать четыре подсистемы. Первая подсистема является спутниковой подсистемой, содержащей, по меньшей мере, спутниковую TRP 20, вторая подсистема является бортовой подсистемой, содержащей, по меньшей мере, бортовую TRP 18, третья подсистема является низколетящей подсистемой, содержащей, по меньшей мере, квадрокоптерную TRP 16 и, возможно, другие низколетящие TRP, и четвертая подсистема является наземной подсистемой, содержащей, по меньшей мере, наземные TRP 14a-14b. В другом примере TRP 18 на бортовой платформе и спутниковая TRP 20 могут быть классифицированы как одна подсистема. В еще одном примере квадрокоптерная TRP 16 и наземные TRP 14a~14b могут быть классифицированы как одна подсистема. В дополнительном примере квадрокоптерная TRP 16, TRP 18 на бортовой платформе и спутниковая TRP 20 могут быть классифицированы как одна подсистема.
В настоящем раскрытии повсеместно термин «соединение» или «канал» относится к связному соединению, установленному между UE и TRP напрямую или косвенно, транслируясь через другие TRP. В качестве примера рассмотрим фиг. 1D. Здесь существуют три соединения между UE 12 и спутниковой TRP 20. Первое соединение является прямой связью между UE 12 и спутниковой TRP 20, второе соединение является соединением UE 12 - TRP 16 - TRP 20 и третье соединение является соединением UE 12 - TRP 16 - TRP 22 - TRP 20. Когда соединение между UE и TRP устанавливается косвенно и транслируется через другие TRP, прямой канал между UE и одной из других TRP может упоминаться как канал доступа, в то время как другие каналы между TRP могут упоминаться как транспортные каналы или транспортные соединения. Например, в третьем соединении, канал UE 12 - TRP 16 является каналом доступа, а каналы TRP 16 - TRP 22 и TRP 22 - TRP 20 являются транспортными каналами. Термин «подсистема» относится к подсистеме связи, содержащей, по меньшей мере, заданный тип TRP, который имеет высокие возможности базовой станции и может предоставлять услуги связи для UE, возможно, вместе с другими типами TRP, действующими в качестве релейных TRP. Например, спутниковая подсистема на фиг. 1D может содержать, по меньшей мере, спутниковую TRP 20, квадрокоптерную TRP 16 и квадрокоптерную TRP 22.
Различные типы TRP могут иметь различные возможности базовой станции. Например, любые две или более наземные TRP 14a-14b и космические TRP 16, 18, 20 могут иметь различные возможности базовой станции. В некоторых примерах возможности базовой станции относятся по меньшей мере к одной из возможностей обработки основополосного сигнала, планированию или к управлению передачами данных к/от UE в пределах его зоны обслуживания. Различные возможности базовой станции связаны с относительными функциональными возможностями, которые обеспечивает TRP. Группа TPR может классифицироваться на различных уровнях, таких TRP с низкими возможностями базовой станции, TRP со средними возможностями базовой станции и TRP с высокими возможностями базовой станции. Например, низкие возможности базовой станции означают низкую способность или отсутствие способности обработки основополосного сигнала, планирования и управления передачами данных. TRP с низкими возможностями базовой станции может передавать данные к UE. Примером TPR с низкими возможностями базовой станции является релейная станция или IAB. Средние возможности базовой станции означают средние возможности планирования и управления передачами данных. Примером TRP со средними возможностями является TRP, имеющая возможности обработки основополосного сигнала и передачи или TRP, работающая в качестве распределенной антенны, имеющей возможности основополосного сигнала и возможности передачи. Высокие возможности базовой станции означают все или большинство возможностей планирования и управления передачей данных. Таким примером являются наземные базовые станции. С другой стороны, отсутствие возможностей базовой станции означает не только отсутствие возможности планирования и управления передачами данных, но также невозможность передачи данных к UE с ролью, аналогичной базовой станции. TRP без возможностей базовой станции может действовать как UE или как распределенная антенна, работающая в качестве удаленного радиоблока или радиочастотного передатчика, не имеющего возможностей обработки сигналов, планирования и управления. Заметим, что возможности базовой станции в настоящем являются только примерами и не ограничиваются этими примерами. Возможности базовой станции могут иметь и другие определения, основанные на потребностях.
В некоторых вариантах осуществления различные космические TRP в системе связи определяются как космические TRP: не имеющие никаких возможностей базовой станции, имеющие низкие возможности базовой станции, имеющие средние возможности базовой станции и имеющие высокие возможности базовой станции. TRP, не имеющая никаких возможностей базовой станции, действует как UE, тогда как космическая TRP, имеющая высокие возможности базовой станции, обладает функциональными возможностями, схожими с наземной базовой станцией. Примеры TRP с низкими возможностями базовой станции, средними возможностями базовой станции и высокими возможностями базовой станции представляются здесь в другом месте. Космические TRP с различными возможностями базовой станции могут иметь различные сетевые требования или сетевые затраты в системе связи.
В некоторых вариантах осуществления TRP способна переключаться между высокими, средними и низкими возможностями базовой станции. Например, космическая TRP с относительно высокими возможностями базовой станции может переключаться для работы в качестве космической TRP с относительно низкими возможностями базовой станции, например, космическая TRP с высокими возможностями базовой станции может действовать как космическая TRP с низкими возможностями базовой станции для сбережения электропитания. В другом примере космическая TRP с низкими, средними или высокими возможностями базовой станции может также переключиться, чтобы действовать как космическая TRP без возможностей базовой станции, такая как UE.
Различные типы TRP могут также иметь различные сетевые конфигурации или структуры. Например, различные типы TRP могут осуществлять связь с UE, используя различные механизмы. Напротив, многочисленные TRP, которые являются TRP одного типа, могут использовать одни и те же механизмы для связи с UE. Различные механизмы связи могут содержать, например, использование различных конфигураций радиоинтерфейсов или различных структур радиоинтерфейсов. Различные структуры радиоинтерфейсов могут содержать различные сигналы, различные нумерологии, различные структуры кадра, различное формирование каналов (например, канальная структура или правила отображения частотно-временных ресурсов) и/или различные механизмы повторной передачи.
Пространства поиска каналов управления также могут изменяться для различных типов TRP. В одном примере, когда космические TRP 16, 18, 20 - все являются TRP различных типов, каждая из космических TRP 16, 18, 20 может иметь различные пространства поиска каналов управления. Пространства поиска каналов управления могут также изменяться для различных систем или подсистем связи. Например, наземные TRP 14a-14b при наземной системе 30 связи могут быть конфигурированы с пространством поиска каналов управления, отличным от космических TRP 16, 18, 20 в космической системе 40 связи. По меньшей мере одна наземная TRP может обладать возможностью поддерживать или конфигурироваться с большим пространством поиска каналов управления, чем по меньшей мере одна космическая TRP.
Наземное UE 12 выполнено с возможностью осуществления связи с наземной системой 30 связи, космической системой 40 связи 40 или и с ними обеими. Точно также, космическое UE 22 выполнено с возможностью осуществления связи с наземной системой 30 связи, космической системой 40 связи 40 или с ними обеими. На фиг. 1B-1E показаны двуглавые стрелки, каждая из которых представляет беспроводное соединение между TRP и UE или между двумя TRP. Соединение, которое может также упоминаться как беспроводной канал связи или просто канал, позволяет осуществлять связь (то есть, передачу и прием) между двумя устройствами в системе связи. Например, соединение может позволить связь между UE и одной или множеством TRP, между различными TRP, или между различными UE. UE может формировать одно или более соединений с наземными TRP и/или с космическими TRP в системе связи. В некоторых случаях соединение является выделенным соединением для одноадресной передачи. В других случаях соединение является широковещательным или многоадресным соединением между группой UE и одной или множеством TRP. Соединение может поддерживать восходящий канал, нисходящий канал, канал прямой связи, канал между TRP и/или транспортные каналы. Соединение может также поддерживать каналы управления и/или каналы передачи данных. В некоторых вариантах осуществления для каналов управления, каналов передачи данных, восходящих каналов и/или нисходящих каналов между UE и одной или множеством TRP могут устанавливаться разные соединения. Это является примером разделения каналов управления, каналов передачи данных, восходящих каналов, каналов прямой связи и/или нисходящих каналов.
Как показано на фиг. 1B, каждое из наземного UE 12 и космического UE 22 имеет соединение с космической TRP 16. Каждое соединение обеспечивает одиночный канал, который может обеспечивать беспроводной доступ к наземному UE 12 и космическому UE 22. В некоторых реализациях многочисленные летательные TRP могут соединяться с наземным или космическим UE, чтобы обеспечивать многочисленные параллельные соединения с UE.
Как отмечено выше, летательная TRP может быть подвижной или мобильной TRP, которая может гибко разворачиваться в различных местах, чтобы удовлетворить сетевые потребности. Например, если наземное UE 12 страдает от плохой услуги беспроводной связи в определенном месте, положение космической TRP 16 может быть изменено на новое в месте, более близком к наземному UE 12, и подключено к наземному UE 12, чтобы улучшить услугу беспроводной связи. Соответственно, космическая TRP может обеспечить повышение возможностей региональной службы, основываясь на сетевых потребностях.
Космические TRP могут быть расположены ближе к UE и могут быть способны легко формировать соединение с UE по линии прямой видимости. Также, мощность передачи на UE может быть уменьшена, что приводит к экономии электропитания. Также может быть достигнуто снижение объема служебной сигнализации, обеспечивая для UE покрытие широкой зоны, что в результате может привести, например, к сокращению количества процедур передачи управления и начального доступа, которые может выполнять UE.
На фиг. 1C показан пример UE, имеющих соединения с различными типами летательных TRP. Фиг. 1C подобен фиг. 1B, но также содержит соединения между космической TRP 18 и наземным UE 12 и космическим UE 22. Дополнительно, соединение формируется между космическим TRP 16 и космическим TRP 18.
В некоторых реализациях космическая TRP 18 действует в качестве узла привязки или центрального узла, чтобы координировать работу других TRP, такого как космическая TRP 16. Центральный узел является примером контроллера в системе связи. Например, в группе, состоящей из множества летательных TRP, одна из летательных TRP может быть назначена в качестве центрального узла. Этот центральный узел затем координирует работу группы летательных TRP. Выбор центрального узла мог быть заранее конфигурирован или, например, активно конфигурироваться сетью. Выбор центрального узла мог также быть согласован между множеством TRP в сети самоконфигурации. В некоторых реализациях центральный узел является бортовой платформой или аэростатом, однако это не всегда может иметь место. В некоторых вариантах осуществления каждая космическая TRP в группе находится полностью под управлением центрального узла и космические TRP в группе не связываются друг с другом. Центральный узел обычно реализуется TRP с высокими возможностями базовой станции. Космическая TRP с высокими возможностями базовой станции может также действовать как распределенный узел, который находится под управлением центрального узла.
Космическая TRP 16 может обеспечить релейное соединение от космической TRP 18 к одному или к обоим наземному UE 12 и космическому UE 22. Например, связь между наземным UE 12 и космической TRP 18 может проходить через космическую TRP 16, действующую в качестве релейного узла. Подобные комментарии применяются и к связи между космическим UE 22 и космической TRP 18.
Релейное соединение использует одну или более промежуточных TRP или релейных узлов, чтобы поддерживать связь между TRP и UE. Например, UE может пытаться получить доступ к TRP с высокими возможностями базовой станции, но канал между UE и TRP с высокими возможностями базовой станции слишком плохой, чтобы формировать прямое соединение. В таком случае одна или более из летательных TRP могут быть развернуты как релейные узлы между UE и TRP с высокими возможностями базовой станции, чтобы позволить связь между UE и TRP с высокими возможностями базовой станции. Передача от UE может приниматься одним релейным узлом и передаваться вдоль релейного соединения до тех пор, пока передача не достигнет TRP c высокими возможностями базовой станции. Подобные комментарии применяются к передаче от TRP c высокими возможностями базовой станции к UE. В релейном соединении каждый релейный узел, через который проходит связь в релейном соединении, упоминается как «hop» (узел переприема). Релейные узлы могут быть реализованы, используя TRP c низкими возможностями базовой станции.
На фиг. 1D представлен пример UE, имеющих соединения с летательной TRP и со спутниковой TRP. Конкретно, на фиг. 1D представлены соединения, показанные на фиг. 1B, и дополнительные соединения между космической TRP 20 и наземным UE 12, космическим UE 22 и космической TRP 16. Поскольку космическая TRP 20 реализуется, используя спутник, космическая TRP 20 может быть способна сформировать беспроводные соединения с наземным UE 12, космическим UE 22 и космической TRP 16, даже когда эти устройства находятся в удаленных местах. В некоторых реализациях космическая TRP 16 может быть реализована как релейный узел между космической TRP 20 и наземным UE 12 и между космической TRP 20 и космическим UE 22, чтобы помочь дополнительно улучшить беспроводное покрытие для наземного UE 12 и космического UE 22. Например, космическая TRP 16 может усилить мощность сигнала, приходящего от космической TRP 20. На фиг. 1D космическая TRP 20 может быть TRP с высокими возможностями базовой станции, которая, как вариант, действует в качестве центрального узла.
На фиг. 1E представлено сочетание соединений, показанных на фиг. 1C и 1D. В этом примере наземное UE 12 и космическое UE 22 обслуживаются многочисленными различными типами летательных TRP и спутниковой TRP. Космические TRP 16, 18 могут действовать в качестве релейных узлов в релейном соединении с наземным UE 12 и/или космическим UE 22. На фиг. 1E одна или обе космические TRP 18, 20 могут быть TRP с высокими возможностями базовой станции, которые действуют в качестве центральных узлов.
Космическая TRP 18 может одновременно играть две роли в системе 10 связи. Например, наземное UE 12 может иметь два отдельных соединения, одно с космической TRP 18 (через космическую TRP 16) и другое с космической TRP 20 (через космическую TRP 16 и космическую TRP 18). При соединении с космической TRP 18, космическая TRP 18 действует как центральный узел. При соединении с космической TRP 20, космическая TRP 18 действует как релейный узел. Дополнительно, космическая TRP 18 может иметь беспроводные транспортные каналы с космической TRP 20, чтобы обеспечить координацию между космическими TRP 18, 20 для формирования двух соединений для предоставления услуг наземному UE 12.
На фиг. 1F показан пример интеграции наземной системы 30 связи и космической системы 40 связи. Интеграция наземных и космических систем связи может также упоминаться как совместная работа наземных и космических систем связи. Традиционно, наземные системы связи и космические системы связи развертывались независимо или отдельно.
На фиг. 1F наземная TRP 14a имеет соединения с космической TRP 16, с наземным UE 12 и с другой наземной TRP 14b. Наземная TRP 14b имеет дополнительные соединения с каждой из космических TRP 16, 18, 20, наземным UE 12 и космическим UE 22. Соответственно, наземное UE 12 и космическое UE 22 оба обслуживаются наземной системой 30 связи и космической системой 40 связи и способны пользоваться преимуществами функциональных возможностей, предоставляемых каждой из этих систем связи.
В некоторых вариантах осуществления наземная система связи 30 обеспечивает первичные услуги беспроводной связи, а космическая система 40 связи предоставляет глобальное бесшовное покрытие. Например, наземная система 30 связи может предоставлять покрытие в районах с высокой плотностью населения, таких как города, тогда как космическая система 40 связи предоставляет услуги отдалённым районам, таким как сельские сообщества.
Космическая система 40 связи, которая, как вариант, интегрируется с наземной системой 30 связи, может образовывать повсеместно действующую систему связи. Повсеместно действующая система связи является системой, предоставляющей услуги беспроводной связи или покрытие на относительно большой площади, вплоть до и включая всю поверхность земного шара. Повсеместно действующая система связи может также быть системой, имеющей немногие или даже отсутствующие области, в которых услуги беспроводной связи недоступны. Также, повсеместно действующая система связи может обеспечивать бесшовное покрытие беспроводной связью. Космическая система связи может обеспечивать повсеместно действующую систему связи, по меньшей мере, частично с помощью спутниковых TRP и/или летательных TRP, чтобы предоставлять обслуживание отдалённым районам, которые не могут обслуживаться наземными системами связи.
На фиг. 1C-1F показаны соединения между UE и всевозможными типами TRP. В целом, UE может контролировать и/или разрешать одно или множество одновременных соединений с различными типами TRP в системе связи. Это является примером объединенной работы различных типов TRP и различных типов соединений. Многочисленные соединения с UE могут использоваться для обеспечения улучшенного покрытия и повышения скорости передачи данных. Например, UE может иметь многочисленные одновременные соединения с одной или более летательными TRP и с одной или более спутниковыми TRP. UE может также иметь одно или более соединений с наземной TRP, такой как базовая станция. Соединения с наземными и космическими TRP могут динамично или полустатично включаться (то есть, устанавливаться, активироваться или разрешаться для работы), выключаться (то есть, разъединяться, деактивироваться или запрещаться для работы) и/или конфигурироваться при наличии одного или более из следующего: доступность соединений, потребность в соединениях, местоположение UE, потребность в услугах для UE и радиосреда, окружающая UE. Включение соединения с TRP в конкретной подсистеме также рассматривается как соединение с этой подсистемой. Когда соединение для конкретного типа TRP или подсистемы включается, например, UE может запустить слепое обнаружение канала управления в соответствии с пространством поиска, определенным для этого типа или подсистемы. В другом примере, когда соединение для конкретного типа TRP или подсистемы включается, UE может запустить некоторые функции, такие как синхронизация и измерение управления радиоресурсами, не разрешая работу остальных функций, таких как слепое обнаружение канала управления для нисходящей или восходящей передачи данных. В некоторых вариантах осуществления сигнализация, переносящая нисходящую управляющую информацию (downlink control information, DCI), информацию о пространстве поиска, также содержит индикатор TRP/подсистемы. Когда UE формирует многочисленные соединения с различным TRP, пакеты данных, которые передаются между UE и многочисленными различными TRP, могут быть одинаковыми или различными.
Совместное действие многочисленных одновременных соединений с UE может позволить функциональные возможности, которые будут совместно использоваться многочисленными соединениями. Эти совместно используемые функциональные возможности могут в некоторых случаях приводить к снижению издержек и уменьшению потребляемой мощности. Например, UE, имеющее многочисленные активные соединения, может использовать наиболее эффективное соединение (например, соединение с наименьшим затуханием и/или утечкой) для выполнения операций передачи и приема.
Контроль многочисленных возможных соединений для UE может обеспечиваться гибко. Например, соединения между UE и одной или более TRP могут активно содержаться, чтобы обеспечить резкое улучшение обслуживания, когда это требуется или необходимо. Соединения между UE и TRP могут также активно отключаться, чтобы обеспечить экономию электропитания и снижение издержек, когда требуется или необходимо. Альтернативно, некоторые функции при соединении между UE и TRP могут активно содержаться или выключаться, чтобы обеспечивать резкое улучшение обслуживания, экономию электропитания и сокращение издержек, когда это требуется или необходимо. Функция(-и) при соединении между UE и TRP может также быть связана с определенным типом обслуживания.
На фиг. 2, 3A-3C и 4 показаны примеры систем и устройств, которые могут реализовывать любые или все подходы настоящего раскрытия.
На фиг. 2 показана примерная система 100 связи. В целом, система 100 связи позволяет иметь многочисленные беспроводные или проводные элементы для передачи данных и другого контента. Целью системы 100 связи может быть предоставление контента (речь, данные, видео, текст) через широковещательное, одноадресное, мультимедийное, широковещательное многоадресное обслуживание (multimedia broadcast multicast service, MBMS) или от одного устройства пользователя другому устройству пользователя и т.д. Система 100 связи может эффективно действовать, совместно используя ресурсы, такие как ширина полосы пропускания. Система 100 связи может быть пригодна для беспроводной связи, используя технологию 5G и/или технологию беспроводной связи более позднего поколения (например, 6G или позже). В некоторых примерах система 100 беспроводной связи может также содержать в себя некоторые прежние технологии беспроводной связи (например, беспроводные технологии 3G или 4G).
В показанном примере система 100 связи содержит электронные устройства (electronic device, ED) 110a-110d, сети радиодоступа (radio access network, RAN) 120a-120b, 122a-122b, базовую сеть 130, коммутируемую телефонную сеть общего пользования (public switched telephone network, PSTN) 140, Интернет 150, и другие сети 160. Хотя на фиг. 2 показано некоторое количество этих компонентов или элементов, в систему 100 может быть включено любое разумное количество этих компонентов или элементов.
ED 110a-110d выполнены с возможностью действия, осуществления связи или того и другого в системе 100. Например, ED 110a-110d выполнены с возможностью передачи, приема или того и другого через каналы или соединения беспроводной связи. Каждое из ED 110a-110d представляет любое подходящее оконечное устройство пользователя для беспроводной работы и может содержать такие устройства (или может ссылаться), как оборудование пользователя (user equipment, UE)/устройство, блок беспроводной передачи/приема (wireless transmit/receive unit, WTRU), мобильная станция, мобильный абонентский модуль, сотовый телефон, станция (station, STA), устройство связи машинного типа (machine type communication device, MTC), персональный цифровой секретарь (personal digital assistant, PDA), смартфон, ноутбук, компьютер, сенсорная панель, беспроводной датчик, транспортное смарт-средство или устройство бытовой электроники. В некоторых реализациях любые из ED 110a-110d являются наземными или космическими UE.
На фиг. 2 RAN 120a-120b содержат наземные TRP 170a-170b, соответственно. Каждая наземная TRP 170a-170b выполнена с возможностью беспроводного взаимодействия с одним или более ED 110a-110c, чтобы позволить доступ к любым другим наземным TRP 170a-170b, базовой сети 130, PSTN 140, Интернету 150, и/или другим сетям 160. Наземные TRP 170a-170b могут содержать (или быть) одно или более из нескольких известных устройств, таких как базовая станция, базовая приемопередающая станция (base transceiver station, BTS), узел B (NodeB), развитый узел В (eNodeB), домашний eNodeB (Home eNodeB), gNodeB, контроллер сайта, точка доступа (access point, AP) или беспроводной роутер, по меньшей мере некоторые из которых обладают высокими возможностями базовой станции. Любое ED 110a-110c может альтернативно или дополнительно быть выполнено с возможностью взаимосвязи, получения доступа или связи с любыми другими наземными TRP 170a-170b, Интернетом 150, базовой сетью 130, PSTN 140, другими сетями 160, или любым сочетанием вышеупомянутых. Система 100 связи может содержать RAN, такие как RAN 120b, в которой соответствующая наземная TRP 170b принимает доступ к Интернету 150 через базовую сеть 130.
В системе 100 связи RAN 120a-120b и наземные TRP 170a-170b формируют, по меньшей мере, часть наземной системы 102 связи, которая обеспечивает наземную беспроводную сеть. Реализация наземных TRP 170a-170b в наземной системе 102 связи этим здесь не ограничивается. В некоторых вариантах осуществления наземная система 102 связи может быть подобна наземной системе 30 связи, показанной на фиг. 1A-1F, где наземные TRP 170a-170b соответствуют наземным TRP 14a-14b. Наземная система связи может содержать физические кабели или оптоволоконные кабели, чтобы поддерживать связь внутри наземной системы связи, к ней или от нее. Например, одна из RAN 120a-120b или обе могут осуществлять связь с базовой сетью 130 через кабель или оптоволоконный кабель. Транспортный канал беспроводной связи, использующий микроволновую связь, может, например, также использоваться в наземной системе связи. В некоторых реализациях микроволновая связь может заменять кабели или оптоволоконные кабели для связи внутри наземной системы связи, к ней или от нее.
Сети RAN 122a-122b содержат космические TRP 172a-172b, соответственно. Каждая космическая TRP 172a-172b выполнена с возможностью беспроводного взаимодействия с одним или более ED 110c-110d. Через космическую TRP 172a-172b одно или более ED 110c-110d имеет доступ или осуществляет связь с любыми другими ED 110a-110d, любыми RAN 120a-120b, любыми наземными TRP 170a-170b, базовой сетью 130, PSTN 140, Интернетом 150 и/или другими сетями 160. В некоторых реализациях космические TRP 172a-172b имеют высокие возможности базовой станции и дополнительно функционируют как базовые станции. Например, космические TRP 172a-172b могут функционировать подобно одному или более из: BTS, NodeB, eNodeB, Home eNodeB, gNodeB, контроллер сайта, точка доступа (AP) или беспроводной роутер. Космические TRP 172a-172b образуют, по меньшей мере, часть космической системы 104 связи, которая обеспечивает космическую беспроводную сеть. Реализация космических TRP 172a-172b в космической системе 104 связи здесь не ограничивается. В некоторых вариантах осуществления космическая система 104 связи может быть подобна космической системе 40 связи, показанной на фиг. 1A-1F, где космические TRP 172a-172b соответствуют любым двум из космических TRP 16, 18, 20.
В некоторых вариантах осуществления наземная система 102 связи и космическая система 104 связи интегрируются так, чтобы ED 110a-110d были в состоянии использовать преимущества функциональных возможностей, обеспечиваемых каждой из этих систем связи.
ED 110a-110c, наземные TRP 170a-170b и космические TRP 172a-172b являются примерами оборудования связи, которое может быть выполнено с возможностью реализации некоторых или всех описанных здесь функциональных возможностей. В варианте осуществления, показанном на фиг. 2, наземная TRP 170a образует часть RAN 120a, которая может содержать и другие наземные или космические TRP, контроллеры, такие как контроллер(-ы) базовой станции (base station controller, BSC) и контроллер(-ы) радиосети (radio network controller, RNC), релейные узлы, элементы и/или устройства. Любая наземная TRP 170a, 170b может быть одиночным элементом, как показано на чертеже, или многочисленными элементами, распределенными в соответствующей RAN, или чем-либо иным. Кроме того, наземная TRP 170b образует часть RAN 120b. RAN 120b может содержать другие наземные или космические TRP, элементы и/или устройства.
Космическая TRP 172a формирует часть сети RAN 122a. RAN 122a может содержать и другие наземные или космические TRP, контроллеры, такие как BSC и RNC, релейные узлы, элементы и/или устройства. Любая из космических TRP 172a-172b может быть одиночным элементом, как показано на чертеже, или многочисленными элементами. В некоторых реализациях одна из космических TRP 172a-172b или обе они передают и/или принимают беспроводные сигналы в пределах определенной географической области или зоны, которая может также упоминаться как “электронное пятно”. Для передачи и/или приема беспроводных сигналов внутри конкретного электронного пятна может использоваться более одной космической TRP. В некоторых вариантах осуществления космическая TRP может использовать многочисленные приемопередатчики.
Каждая TRP, содержащая любую из наземных TRP 170a-170b и космических TRP 172a-172b, передает и/или принимает беспроводные сигналы внутри определенной географической области или зоны, иногда называемой «ячейкой» или «зоной покрытия». Ячейка может дополнительно быть разделена на секторы ячейки и наземные TRP 170a-170b или космические TRP 172a-172b могут, например, использовать многочисленные приемопередатчики, чтобы предоставить обслуживание многочисленным секторам. В некоторых вариантах осуществления, могут быть установлены пико- или фемто-ячейки, в которых поддерживается такая технология радиодоступа. В некоторых вариантах осуществления для каждой ячейки могут использоваться многочисленные приемопередатчики, например, используя технологию многочисленных входов-многочисленных выходов (multiple-input multiple-output, MIMO). Альтернативно, одну ячейку могут формировать более одной TRP, где множество TRP в такой ячейке могут совместно использовать тот же самый идентификатор ячейки (identifier, ID). Ячейка, содержащая многочисленные TRP, может упоминаться как гиперячейка. Гиперячейка может содержать только по меньшей мере одну наземную TRP или содержать только по меньшей мере одну космическую TPR. Гиперячейка может также содержать по меньшей мере одну наземную TRP и по меньшей мере одну космическую TRP. Ячейка или гиперячейка может содержать TRP одного и того же типа, TRP разного типа, TRP, принадлежащие к одной и той же подсистеме, или TRP, принадлежащие к различным подсистемам. Например, ячейка или гиперячейка для зоны, покрытой электронным пятном или многочисленными электронными пятнами, которые формируются спутниковой TRP, могут дополнительно содержать один или более других типов наземных TRP или космических TRP. С точки зрения UE, гиперячейка может быть зоной, покрытой объектом виртуального доступа. Система может формировать гиперячейки, которые содержат многочисленные TRP, имеющие один и тот же ID ячейки. Система может адаптировать гиперячейки в соответствии с сетевой топологией, распределением нагрузки и распределением UE. Система может динамично обновлять топологию гиперячейки, чтобы адаптироваться к изменениям сетевой топологии, распределению нагрузки и/или распределению UE.
Количество RAN 120a-120b, 122a-122b, показанное на чертеже, является только примерным. При разработке системы 100 связи может предполагаться любое количество RAN.
Наземные TRP 170a-170b осуществляют связь с одним или более ED 110a-110c по линии 190 беспроводной связи, используя каналы беспроводной связи, например, радиочастотные (RF), микроволновые, инфракрасные (IR) и т.д. Линия 190 беспроводной связи может использовать любую подходящую технологию радиодоступа. Например, система 100 связи может в линии 190 беспроводной связи реализовать один или более ортогональных или неортогональных способов доступа к каналу, таких как мультидоступ с кодовым разделением каналов (code division multiple access, CDMA), мультидоступ с временным разделением каналов (time division multiple access, TDMA), мультидоступ с частотным разделением каналов (frequency division multiple access, FDMA), ортогональный FDMA (OFDMA) или FDMA с одиночной несущей (single-carrier FDMA, SC-FDMA).
Наземные TRP 170a-170b могут реализовывать наземный радиодоступ универсальной мобильной телекоммуникационной системы (Universal Mobile Telecommunication System (UMTS) Terrestrial Radio Access (UTRA)), чтобы установить линию 190 беспроводной связи, использующую широкополосную CDMA (wideband CDMA, WCDMA). При этом, наземные TRP 170a-170b могут реализовывать такие протоколы, как протокол высокоскоростного пакетного доступа (High Speed Packet Access, HSPA), развитый HPSA (Evolved HPSA, HSPA+), как вариант, содержащий протокол высокоскоростного пакетного доступа нисходящего канала (High Speed Downlink Packet Access, HSDPA), протокол высокоскоростной пакетного доступа восходящего канала (High Speed Packet Uplink Access, HSUPA) или оба. Альтернативно, наземные TRP 170a-170b могут установить линию 190 беспроводной связи с развитым наземным радиодоступом UTMS (Evolved UTMS Terrestrial Radio Access, E-UTRA), используя LTE, LTE-A, LTE-B, 5G New Radio (NR) и/или 6G. Предполагается, что система 100 связи может использовать многочисленные функциональные возможности доступа к каналу, включая такие схемы, как описано выше. Другие радиотехнологии для реализации линий беспроводной связи содержат схемы по стандартам IEEE 802.11, 802.15, 802.16, CDMA2000, CDMA2000 1X, CDMA2000 EV-DO, IS-2000, IS-95, IS-856, GSM, EDGE и GERAN. Конечно, могут использоваться и другие многочисленные схемы доступа и протоколы беспроводной связи.
Космические TRP 172a-172b осуществляют связь с одним или более ED 110c-110d по линии 192 беспроводной связи, используя, например, радиоволны, микроволны, инфракрасное излучение и т.д. Линия 192 беспроводной связи может использовать любую соответствующую технологию радиодоступа. Например, система 100 связи может реализовать в линии 192 беспроводной связи один или более ортогональных или неортогональных способов доступа к каналу, таких как CDMA, TDMA, FDMA, OFDMA или SC-FDMA.
Космическая TRP 172a-172b может реализовать UTRA, чтобы установить линию 192 беспроводной связи, используя WCDMA. При этом, космические TRP 172a-172b могут реализовывать такие протоколы, как HSPA, HSPA+, как вариант, включая HSDPA, HSUPA или оба. Альтернативно, космические TRP 172a-172b могут установить линию 192 беспроводной связи с помощью Е-UTRA, используя LTE, LTE-A, LTE-B, 5G NR и/или 6G. Как замечено выше, другие радиотехнологии для реализации линий беспроводной связи содержат IEEE 802.11, 802.15, 802.16, CDMA2000, CDMA2000 1X, CDMA2000 EV-DO, IS-2000, IS-95, IS-856, GSM, EDGE и GERAN. Конечно, могут использоваться и другие многочисленные схемы доступа и протоколы беспроводной связи. Линия 192 беспроводной связи может, по существу, быть подобна линии 190 беспроводной связи или они могут существенно различаться.
Космические TRP 172a-172b осуществляют связь друг с другом по линии 194 беспроводной связи, а космическая TRP 172b осуществляет связь с наземной TRP 170a по линии 196 беспроводной связи. Линии 194, 196 беспроводной связи могут обеспечивать релейное или транспортное соединение между космическими TRP 172a-172b и наземной TRP 170a. В некоторых вариантах осуществления для связи с одной или с обеими космическими TRP 172a-172b через линию 196 беспроводной связи может назначаться другая наземная TRP и/или RAN, чтобы обеспечить релейное или транспортное соединение для космических TRP 172a-172b.
Линии 194, 196 беспроводной связи могут использовать любую подходящую технологию радиодоступа. Например, система 100 связи может реализовывать один или более ортогональных или неортогональных способов доступа к каналу, таких как CDMA, TDMA, FDMA, OFDMA или SC-FDMA в линиях 194, 196 беспроводной связи. Космические TRP 172a-172b могут реализовывать UTRA, чтобы устанавливать линию 194, 196 беспроводной связи, используя WCDMA. При этом, космические TRP 172a-172b могут реализовывать такие протоколы, как HSPA, HSPA+, как вариант, включая HSDPA, HSUPA или оба. Альтернативно, космические TRP 172a-172b могут устанавливать линию 194, 196 беспроводной связи с помощью Е-UTRA, используя LTE, LTE-A, LTE-B, 5G NR и/или 6G. Как замечено выше, другие радиотехнологии реализации линий беспроводной связи содержат технологии IEEE 802.11, 802.15, 802.16, CDMA2000, CDMA2000 1X, CDMA2000 EV-DO, IS-2000, IS-95, IS-856, GSM, EDGE и GERAN. Конечно, могут использоваться и другие многочисленные схемы доступа и беспроводные протоколы. Линии 194, 196 беспроводной связи могут быть, по существу, подобны линии 190 беспроводной связи или линии 192 беспроводной связи или могут существенно различаться.
Сети RAN 120a-120b осуществляют связь с базовой сетью 130, чтобы предоставлять для ED 110a-110d различные услуги, такие как речевые услуги, передачу данных и другие услуги. RAN 122a-122b также осуществляют связь с базовой сетью 130. Как вариант, RAN 122a-122b соединяются с базовой сетью напрямую или соединяются с базовой сетью 130 косвенно через RAN 120a-120b. RAN 120a-120b, 122a-122b и/или базовая сеть 130 может прямо или косвенно осуществлять связь с одной или более другими RAN (не показаны), которые могут или не могут напрямую обслуживаться базовой сетью 130 и могут или не могут использовать ту же самую технологию радиодоступа, что и любые из RAN 120a-120b, 122a-122b. Базовая сеть 130 может также служить шлюзом доступа между (i) сетями RAN 120a-120b, 122a-122b или устройствами ED 110a-110d или обоими, и (ii) другими сетями (такими как PSTN 140, Интернет 150 и другие сети 160).
Следует заметить, что космические TRP 172a-172b могут соединяться с базовой сетью 130 напрямую, однако это не всегда может иметь место. Одна из двух или обе космические TRP 172a-172b могут вместо этого соединяться с базовой сетью 130 через одну или более космические TRP. Эти космические TRP в некоторых случаях могли быть включены в RAN 122a-122b.
ED 110a-110d осуществляют связь друг с другом по прямому каналу (sidelink, SL) линии 180 беспроводной связи, используя каналы беспроводной связи, например, радиочастотный (RF), микроволновый, инфракрасный и т.д. Линия SL 180 беспроводной связи может использовать любую приемлемую технологию радиодоступа и может быть, по существу, подобна линии 190 беспроводной связи или они могут существенно различаться. Например, система 100 связи может реализовывать один или более способов доступа к каналу, такие как CDMA, TDMA, FDMA, OFDMA или SC-FDMA в линии SL 180 беспроводной связи.
В некоторых вариантах осуществления любые или все линии 180, 190, 192, 194, 196 беспроводной связи реализуются, по меньшей мере частично, через нелицензируемый спектр.
Некоторые или все ED 110a-110d могут обладать функциональными возможностями для осуществления связи с различными сетями беспроводной связи по различным линиям беспроводной связи, используя различные беспроводные технологии и/или протоколы. Вместо беспроводной радиосвязи (или в дополнение к ней) ED могут осуществлять связь через проводные каналы связи с провайдером услуг или переключение (не показано) к Интернету 150. PSTN 140 может содержать коммутируемые телефонные сети для обеспечения обычной аналоговой телефонной связи (plain old telephone service, POTS). Интернет 150 может содержать сеть компьютеров и подсетей (интранет) или то и другое и использовать такие протоколы, как интернет-протокол (internet protocol, IP), протокол управления передачей (transmission control protocol, TCP) и протокол дейтаграммы пользователя (user datagram protocol, UDP). ED 110a-110d могут быть многорежимными устройствами, способными действовать в соответствии с многочисленными технологиями радиодоступа, и содержат многочисленные приемопередатчики, необходимые для поддержки многочисленных технологий радиодоступа.
На фиг. 3A-3C показаны примерные устройства, которые могут реализовывать способы, и принципы, соответствующие настоящему раскрытию. В частности, на фиг. 3A показано примерное ED 110, на фиг. 3B показана примерная наземная TRP 170 и на фиг. 3C показана примерная космическая TRP 172. Эти компоненты могут использоваться в системе 100 связи или в любой другой соответствующей системе.
Как показано на фиг. 3A, ED 110 содержит по меньшей мере один процессорный блок или процессор 200. Процессор 200 реализует различные операции ED 110 по обработке. Например, процессор 200 может выполнять кодирование сигнала, разрядное скремблирование, обработку данных, управление электропитанием, обработку ввода/вывода или любые другие функциональные возможности, позволяющие ED 110 работать в системе 100 связи. Процессор 200 может также быть выполнен с возможностью реализации некоторых или всех функциональных возможностей и/или вариантов осуществления, описанных здесь более подробно. Каждый процессор 200 содержит любое соответствующее процессорное или вычислительное устройство, выполненное с возможностью осуществления одной или более операций. Каждый процессор 200 может, например, содержать микропроцессор, микроконтроллер, цифровой сигнальный процессор, программируемую логическую интегральную схему или прикладную специализированную интегральную схему.
ED 110 также содержит по меньшей мере один приемопередатчик 202. Приемопередатчик 202 выполнен с возможностью модуляции данных или другого контента для передачи по меньшей мере одной антенной или сетевым интерфейсным контроллером (Network Interface Controller, NIC) 204. Приемопередатчик 202 также выполнен с возможностью демодуляции данных или другого контента, принимаемого по меньшей мере одной антенной 204. Каждый приемопередатчик 202 содержит любую подходящую структуру для формирования сигналов для беспроводной передачи и/или обработки сигналов, принимаемых с помощью беспроводных технологий. Каждая антенна 204 содержит любую соответствующую структуру для передачи и/или приема беспроводных сигналов. В ED 110 могут использоваться один или множество приемопередатчиков 202. В ED 110 могут использоваться одна или множество антенн 204. Хотя на чертеже приемопередатчик 202 показан как одиночный функциональный блок, он может также быть реализован, используя по меньшей мере один передатчик и по меньшей мере один отдельный приемник.
ED 110 дополнительно содержит одно или более устройств 206 ввода-вывода или интерфейсов. Устройства 206 ввода-вывода позволяют осуществлять взаимодействие с пользователем или другими устройствами в сети. Каждое устройство 206 ввода-вывода содержит любую соответствующую структуру для предоставления информации или приема информации от пользователя, такую как динамик, микрофон, клавиатура, клавиатурная панель, дисплей или сенсорный экран, включая соединения сетевого интерфейса.
Кроме того, ED 110 содержит по меньшей мере одну память 208. Память 208 хранит команды и данные, используемые, сформированные или собранные ED 110. Например, память 208 может хранить команды программного обеспечения или модули, выполненные с возможностью реализации некоторых или всех функциональных возможностей и/или вариантов осуществления, описанных выше и которые исполняются процессором(-ами) 200. Каждая память 208 содержит любое соответствующее энергозависимое и/или энергонезависимое запоминающее устройство и устройство(-а) извлечения. Использоваться может любой подходящий тип памяти, такой как оперативная память (random access memory, RAM), постоянная память (read only memory, ROM), жесткий диск, оптический диск, карта модуля идентификации абонента (subscriber identity module, SIM), карта памяти, безопасная цифровая (secure digital, SD) карта памяти и т.п.
В некоторых реализациях ED 110 является космическим ED. Например, ED 110 может содержать оборудование связи, переносимое летательным устройством. Летательное устройство могло содержать винт, воздушный шар или крылья, чтобы обеспечивать подъем системы. Двигатель внутреннего сгорания или электродвигатель могут приводить в действие воздушный винт. Двигатель внутреннего сгорания или электродвигатель могут также приводить в действие пропеллер, чтобы обеспечивать тягу для летательного устройства. Вместо этого, чтобы обеспечивать тягу, также может использоваться реактивный двигатель. Летательное устройство может также содержать другие компоненты, такие как, например, фюзеляж, рули, закрылки, стабилизаторы и шасси.
Как показано на фиг. 3B, наземная TRP 170 содержит по меньшей мере один процессор 250, по меньшей мере один передатчик 252, по меньшей мере один приемник 254, одну или более антенн 256, по меньшей мере одну память 258 и одно или более устройств ввода-вывода или интерфейсов 266. Наземная TRP 170 является примером сотовой TRP. В некоторых реализациях наземная TRP 170 является базовой станцией. Приемопередатчик, не показанный на чертеже, может использоваться вместо передатчика 252 и приемника 254. Планировщик 253 может быть связан с процессором 250. Планировщик 253 может быть включен в состав наземной TRP 170 или управляться отдельно от наземной TRP 170. Процессор 250 осуществляет различные операции наземной TRP 170 по обработке, такие как кодирование сигнала, разрядное скремблирование, обработка данных, управление электропитанием, обработка ввода/вывода или любые другие функциональные возможности. Процессор 250 может также быть выполнен с возможностью реализации некоторых или всех функциональных возможностей и/или вариантов осуществления, описанных здесь более подробно в другом месте. Каждый процессор 250 содержит любую соответствующую обработку или вычислительное устройство, выполненные с возможностью реализации одной или более операций. Каждый процессор 250 может, например, содержать микропроцессор, микроконтроллер, цифровой сигнальный процессор, программируемую логическую интегральную схему или прикладную специализированную интегральную схему.
Каждый передатчик 252 содержит любую подходящую структуру для формирования сигналов для беспроводной передачи одному или более ED или другим устройствам. Каждый приемник 254 содержит любую подходящую структуру для обработки сигналов, принимаемых с помощью беспроводных технологий от одного или более ED или других устройств. Хотя по меньшей мере один передатчик 252 и по меньшей мере один приемник 254 показаны как отдельные компоненты, они могут объединяться в приемопередатчик. Каждая антенна 256 содержит любую подходящую структуру для передачи и/или приема беспроводных сигналов через линии 190, 196 беспроводной связи. Хотя общая антенна 256 показана здесь связанной как с передатчиком 252, так и с приемником 254, одна или более антенн 256 могут быть связаны с передатчиком(-ами) 252, и одна или более отдельных антенн 256 могут быть связаны с приемником(-ами) 254. Каждая память 258 содержит любое соответствующее энергозависимое и/или энергонезависимое устройство(-а) памяти и извлечения, такое как описанные выше в связи с ED 110. Память 258 хранит команды и данные, используемые, сформированные или собранные наземной TRP 170. Например, память 258 могла хранить команды программного обеспечения или модули, выполненные с возможностью реализации некоторых или всех функциональных возможностей и/или вариантов осуществления, описанных выше, которые выполняются процессором(-ами) 250.
Каждое устройство 266 ввода-вывода позволяет взаимодействовать с пользователем или другими устройствами в сети. Каждое устройство 266 ввода-вывода содержит любую подходящую структуру для предоставления информации или приема/предоставления информации от пользователя, включая связи сетевого интерфейса.
Обращаясь теперь к фиг. 3C, космическая TRP 172 содержит по меньшей мере один процессор 270, по меньшей мере один передатчик 272, по меньшей мере один приемник 274, одну или более антенн 276, по меньшей мере одну память 278 и одно или более устройств ввода-вывода или интерфейсов 286. Приемопередатчик, не показанный на чертеже, может использоваться вместо передатчика 272 и приемника 274. Необязательный планировщик 273 может быть связан с процессором 270. Планировщик 273 может быть включен в состав или действовать отдельно от космической TRP 172. Процессор 270 реализует различные операции по обработке космической TRP 172, такие как кодирование сигнала, разрядное скремблирование, обработка данных, управление электропитанием, обработка ввода/вывода или любые другие функциональные возможности. Процессор 270 может также быть выполнен с возможностью реализации некоторых или всех функциональных возможностей и/или вариантов осуществления, описанные здесь более подробно в другом месте. Каждый процессор 270 содержит любое соответствующее процессорное или вычислительное устройство, выполненное с возможностью реализации одной или более операций. Каждый процессор 270 может, например, содержать микропроцессор, микроконтроллер, цифровой сигнальный процессор, программируемую логическую интегральную схему или прикладную специализированную интегральную схему.
Каждый передатчик 272 содержит какую-либо подходящую структуру для формирования сигналов для беспроводной передачи к одному или более ED или другим устройствам. Каждый приемник 274 содержит какую-либо подходящую структуру для обработки сигналов, принимаемых с помощью беспроводных технологий от одного или более ED или других устройств. Хотя на чертеже они показаны как отдельные компоненты, по меньшей мере один передатчик 272 и по меньшей мере один приемник 274 могут быть объединены в приемопередатчик. Каждая антенна 276 содержит любую подходящую структуру для передачи и/или приема беспроводных сигналов через беспроводные линии 192, 194, 196. Хотя здесь показана общая антенна 276, связанная как с передатчиком 272, так и с приемником 274, с передатчиком(-ами) 272 могут быть связаны одна или более антенн 276 и одна или более отдельных антенн 276 могут быть связаны с приемником(-ами) 274. Каждая память 278 содержит любое подходящее энергозависимое и/или энергонезависимое устройство(-а) хранения и извлечения, такое как описанные выше в связи с ED 110. Память 278 хранит команды и данные, используемые, формируемые или собранные космической TRP 172. Например, память 278 может хранить команды программного обеспечения или модули, выполненные с возможностью реализации некоторых или всех функциональных возможностей и/или вариантов осуществления, описанных выше, и которые выполняются процессором(-ами) 270.
Каждое устройство 286 ввода-вывода позволяет взаимодействовать с пользователем или другими устройствами в сети. Каждое устройство 286 ввода-вывода содержит любую подходящую структуру для предоставления информации или приема/предоставления информации от пользователя, включая связи сетевого интерфейса.
Как отмечено выше, космическая TRP 172 может быть связана со спутником или летательным устройством, чтобы эксплуатировать космическую TRP 172 над поверхностью Земли. Более подробная информация относительно структуры летательного устройства представлена выше.
Следует заметить, что в системах связи, раскрытых здесь, все многочисленные соединения с UE или TRP могут использовать в UE или TRP один и тот же компонент или модуль (например, одно и то же оборудование связи). Может не требоваться, чтобы в многочисленных терминалах на UE или TRP один терминал использовался для передачи с первым типом TRP, а другой терминал использовался для передачи со вторым типом TRP. Например, приемопередатчик 202, показанный на фиг. 3A, может использоваться для связи с самыми разными типами TRP. Точно также, каждый из передатчиков 252, 272 и приемников 254, 274 может использоваться для связи с UE и всевозможными типами TRP. Использование одиночного терминала, возможно, в качестве системы связи конфигурирует различные типы TRP, основываясь на единой технологии или стандарте беспроводной связи.
На фиг. 4 схематично показана схема диспетчера 300 радиоинтерфейса для конфигурации радиоинтерфейса. Диспетчер 300 радиоинтерфейса может быть, например, модулем, который определяет параметры радиоинтерфейса и совместно определяет, как должна осуществляться передача и/или прием радиоинтерфейсом. В некоторых вариантах осуществления диспетчер радиоинтерфейса может быть реализован так, чтобы конфигурировать любые из линий 180, 190, 192, 194, 196 беспроводной связи. Диспетчер 300 радиоинтерфейса может быть реализован в наземной TRP 170 или в космической TRP 172. Однако, следует заметить, что диспетчер радиоинтерфейса в некоторых вариантах осуществления настоящего раскрытия не может быть реализован и должен считаться необязательным.
Компоненты диспетчера 300 радиоинтерфейса содержат по меньшей мере одно из следующего: компонент 305 формы сигнала, компонент 310 структуры кадра, компонент 315 схемы мультидоступа, компонент 320 протокола и компонент 325 модуляции и кодирования. В некоторых вариантах осуществления планировщик может выполнять для TRP все планирование. Например, планировщик может выполнять функцию компонента 305 формы сигнала, компонента 310 структуры кадра, компонента 315 схемы мультидоступа, компонента 320 протокола и компонента 325 модуляции и кодирования.
Компонент 305 формы сигнала может определять структуру и форму передаваемого сигнала. Варианты формы сигнала могут содержать ортогональные сигналы мультидоступа и неортогональные сигналы мультидоступа. Примерами таких, не создающих ограничения опций формы сигнала, являются сигналы типа Single-Carrier (SC, одиночная несущая), Ultra Wideband (UWB, ультраширокополосный), Frequency Modulated Continuous Wave (FMCW, частотно модулированный непрерывный сигнал), Linear Frequency Modulated (LFM, сигнал с линейной частотной модуляцией (ЛЧМ)), Orthogonal Frequency Division Multiplexing (OFDM, ортогональное мультиплексирование с частотным разделением каналов), Single-Carrier Frequency Division Multiple Access (SC-FDMA, мультидоступ с частотным разделением каналов и одиночной несущей), Filtered OFDM (f-OFDM, фильтруемая OFDM), Time windowing OFDM (OFDM с временным окном), Filter Bank Multicarrier (FBMC, мультинесущая с набором фильтров), Universal Filtered Multicarrier (UFMC, универсальная отфильтрованная мультинесущая), Generalized Frequency Division Multiplexing (GFDM, обобщенное мультиплексирование с частотным разделением каналов), Wavelet Packet Modulation (WPM, вейвлетная пакетная модуляция), Faster Than Nyquist (FTN, сигнал быстрее Найквиста) Waveform, low Peak to Average Power Ratio Waveform (low PAPR WF, сигнал с малым отношением пиковой мощности к средней мощности), Discrete Fourier Transform – spread – Orthogonal Frequency Domain Modulation (DFT-s-OFDM, дискретное преобразование Фурье-разброс-ортогональная модуляция в частотной области) и single carrier Offset Quadrature Amplitude Modulation (OQAM, квадратурная амплитудная модуляция со смещением и одиночной несущей). В некоторых вариантах осуществления возможно сочетание опций формы сигнала. Форма сигнала LFM-OFDM является не создающим ограничений примером такого сочетания. В некоторых вариантах может быть реализована форма импульса сигнала, основанного на одиночной несущей, которая обеспечивает принятие компромиссных решений между эффективностью спектра и другими метриками характеристик, такими как, например, PAPR и чувствительность к ошибкам временной синхронизации.
Компонент 310 структуры кадра может определять конфигурацию кадра или группы кадров. Компонент 310 структуры кадра может указывать одно или более из следующего: время, частота, пилотная сигнатура, код, или другой параметр кадра или группы кадров.
Примерами вариантов структуры кадра, не создающими ограничений, являются: количество символов во временном слоте, количество временных слотов в кадре и длительность каждого временного слота (иногда известная как интервал времени передачи (transmission time interval, TTI), длительность времени передачи или единица измерения времени передачи (transmission time unit, TTU). Компонент структуры кадра может также определять, является ли временной слот конфигурируемым многоуровневым TTI, фиксированным TTI, или конфигурируемым одноуровневым TTI. Компонент структуры кадра может дополнительно определять механизм сосуществования различных конфигураций структур кадра. Структура кадра может быть сетевой вырезкой/специальной услугой. Альтернативно, структура кадра может прослеживаться или персонализироваться на специфичной для устройства основе, например, используя искусственный интеллект и/или машинное обучение, чтобы обеспечить специфичную оптимизацию радиоинтерфейса. Патентная заявка США № 16/854,329, которая включена сюда посредством ссылки во всей ее полноте, представляет варианты осуществления для введения новых структур кадров, которые выходят за рамки сетевой вырезки/услуги службы конкретной структуры кадра в персонализированную прослеживаемую структуру кадра, которая содержит персонализированный тип услуг и персонализированную установку структуры кадра. Таким образом, использование искусственного интеллекта и/или машинного обучения для оптимизации специфичной для устройства структуры кадра может привести к новой конфигурации структуры кадра, чтобы удовлетворить потребности каждого UE на индивидуальной основе.
Для некоторых форм сигналов, таких как определенные сигналы, основанные на OFDM, компонент структуры кадра может также определять один или более связанных параметров формы сигнала, такие как ширина интервала между поднесущими, длительность символа, длина циклического префикса (cyclic prefix, CP) длина, ширина полосы пропускания канала, защитные интервалы/поднесущие и размер и частота выборки.
Дополнительно, компонент 310 структуры кадра может, кроме того, определить, используется ли структура кадра в дуплексной связи с временным разделением каналов, дуплексной связи с частотным разделением каналов или при полнодуплексной связи.
Дополнительно, компонент 310 структуры кадра может, кроме того, определять и/или направление передачи для каждого символа в кадре. Например, каждый символ может быть независимо конфигурирован как нисходящий символ, восходящий символ или гибкий символ.
Все вместе характеристики компонента формы сигнала и компонента структуры кадра иногда определяются как «нумерология». Таким образом, радиоинтерфейс может содержать компонент 330 нумерологии, определяющий количество параметров конфигурации радиоинтерфейса, таких как промежуток между поднесущими, длина CP, длина символа, длина слота и количество символов на слот.
Эти нумерологии, также известные как конфигурации промежутков между поднесущими или конфигурации длительности символа, могут быть масштабируемыми в том смысле, что промежутки между поднесущими в различных нумерологиях кратны друг другу и длины временных слотов различных нумерологий также кратны друг другу. Такая масштабируемая структура через многочисленные нумерологии обеспечивает преимущества реализации, например, масштабируемой общей длительности символов OFDM в контексте дуплекса с временным разделением каналов (TDD).
Кадры могут быть конфигурированы, используя одну или сочетание масштабируемых нумерологий. Например, нумерология с промежутком между поднесущими 60 кГц имеет относительно короткую длительность символа OFDM (потому что длительность символа OFDM изменяется обратно пропорционально промежутку между поднесущими), что делает нумерология с 60 кГц, в частности, приемлемой для связей со сверхнизкой задержкой, таких как связи типа «транспортное средство-любой объект» (Vehicle-to-Any, V2X). Дальнейшим примером нумерологии с относительно короткой длительностью символа OFDM, пригодной для связи с малой задержкой, является нумерология с промежутком между поднесущими 30 кГц. Нумерология с промежутком между поднесущими 15 кГц может быть совместима с LTE. Нумерология с промежутком между поднесущими 15 кГц может служить нумерологией по умолчанию для начального доступа устройства к сети. Это нумерология 15 кГц может также быть пригодна для широкополосных услуг. Нумерология с промежутком 7,5 кГц, которая обладает относительно большой длительностью символа OFDM, может быть особенно полезна для улучшения покрытия и широковещательной и многоадресной связи. Дополнительное использование этих нумерологий должно быть очевидным для специалистов в данной области техники. Из этих четырех перечисленных нумерологий те, которые имеют промежутки между поднесущими 60 кГц и 30 кГц, более устойчивы к доплеровскому расширению (условия быстрого движения) из-за более широкого промежутка между поднесущими. Дополнительно предполагается, что различные нумерологии могут использовать различные значения для других параметров физического уровня, таких как тот же промежуток между поднесущими и различные длины циклических префиксов. Кроме того, промежуток между поднесущими может зависеть от рабочей полосы частот. Например, промежуток между поднесущими на частотах миллиметровых длин волн может быть большим, чем на более низких частотах.
Дополнительно предполагается, что могут использоваться и другие промежутки между поднесущими, такой как большие или меньшие промежутки между поднесущими. Например, другие промежутки между поднесущими, изменяющиеся с коэффициентом 2n, включают 120 кГц и 3,75 кГц.
В других примерах может быть реализована более ограниченная масштабируемость, в которой две или более нумерологий имеют промежутки между поднесущими, которые являются целочисленными множителями наименьшего промежутка между поднесущими, не обязательно связанными с коэффициентом 2n. Примерами являются промежутки между поднесущими 15 кГц, 30 кГц, 45 кГц и 60 кГц.
В других примерах могут использоваться немасштабируемые промежутки между поднесущими, которые не являются целочисленными множителями, кратными самого малому промежутку между поднесущими, такие как 15 кГц, 20 кГц, 30 кГц, 60 кГц.
Сигналы на основе OFDM могут использоваться для передачи сигнала, в котором многочисленные нумерологии сосуществуют одновременно. Более конкретно, многочисленные сигналы поддиапазонов OFDM могут формироваться параллельно, каждый в пределах различных поддиапазонов, причем каждый поддиапазон имеет разный промежуток между поднесущими (и, более широко, разные нумерологии). Многочисленные сигналы поддиапазона объединяются в единый сигнал для передачи, например для нисходящих передач. Альтернативно, многочисленные сигналы поддиапазона могут передаваться отдельными передатчиками, например, для восходящих передач от многочисленных электронных устройств (ED), которые могут быть оборудованием пользователя (UE). В некоторых реализациях могут также использоваться сигналы, не основанные на OFDM.
Использование различных нумерологий может позволить радиоинтерфейсу поддерживать сосуществование разнообразного набора случаев использования, имеющих широкий диапазон требований по качеству обслуживания (quality of service, QoS), таких как разные уровни задержки или допуска по надежности, а также различные требования по полосе пропускания или служебной сигнализации. В одном примере базовая станция может сообщать ED индекс, представляющий выбранную нумерологию, или один единственный параметр (например, промежуток между поднесущими) выбранной нумерологии. Основываясь на этой сигнализации, ED может определить параметры выбранной нумерологии из другой информации, такой как таблица поиска возможных нумерологий, хранящихся в памяти.
Продолжая рассматривать остальные компоненты диспетчера 300 радиоинтерфейса, компонент 315 схемы мультидоступа может определить, как предоставляется доступ к каналу для одного или более ED. В целом, варианты технологий мультидоступа могут классифицироваться как мультидоступ на основе планирования/предоставления или мультидоступ на основе отсутствия планирования/предоставления (то есть, свободного планирования или свободного предоставления), как ортогональный мультидоступ или неортогональный мультидоступ, мультидоступ с временным разделением каналов (Time Division Multiple Access, TDMA), мультидоступ с частотным разделением каналов (Frequency Division Multiple Access, FDMA), мультидоступ с кодовым разделением каналов (Code Division Multiple Access, CDMA), мультидоступ с пространственным разделением каналов (Space Division Multiple Access, SDMA) или любые их сочетания. Не создающие ограничений примеры вариантов технологии мультидоступа содержат технологии, определяющие, как ED совместно использует общий физический канал, такие как: TDMA, FDMA, CDMA, SDMA, мультидоступ с частотным разделением каналов и одиночной несущей (Single Carrier Frequency Division Multiple Access, SC-FDMA), мультидоступ с кодовым разделением каналов с мультинесущей и сигнатурой низкой плотности (Low Density Signature Multicarrier Code Division Multiple Access, LDS-MC-CDMA), неортогональный мультидоступ (Non-Orthogonal Multiple Access (NOMA), мультидоступ с разделением каналов по образцу (Pattern Division Multiple Access, PDMA), мультидоступ с решетчатым разделением (Lattice Partition Multiple Access, LPMA), мультидоступ с распределением ресурсов (Resource Spread Multiple Access, RSMA) и мультидоступ с прореженным кодом (Sparse Code Multiple Access, SCMA). Любой из этих многочисленных вариантов технологий мультидоступа может быть реализован, используя один или более из следующего: спланированный доступ; неспланированный доступ, также известный как доступ со свободным предоставлением или доступ с конфигурируемым предоставлением; неортогональный мультидоступ; ортогональный мультидоступ, например, через выделенный канальный ресурс (то есть, без совместного использования многочисленными ED); совместно используемый канальный ресурс, основанный на конкуренции; совместно используемый канальный ресурс, не основанный на конкуренции; и когнитивный доступ на радиооснове.
Компонент 320 протокола может указывать, как должны делаться передача и/или повторная передача. Не создающие ограничений примеры механизмов передачи и/или повторной передачи содержат такие механизмы, которые определяют механизм запланированного размера канала передачи данных и сигнализации для передачи и/или повторной передачи. Схемы повторной передачи содержат схему повторной передачи на физическом уровне, используя HARQ, схему повторной передачи более высокого уровня, используя ARQ, и схему повторной передачи, основанную на ненормированном коде более высокого или физического уровня.
Компонент 325 модуляции и кодирования может указывать, как передаваемая информация может кодироваться/декодироваться и модулироваться/демодулироваться для целей передачи/приема. Кодирование может относиться к способам обнаружения ошибок и упреждающей коррекции ошибок. Не создающие ограничений примеры вариантов кодирования содержат турбокод, треллис-турбокоды, турбокоды изделия, фонтанные коды, коды с проверкой четности низкой плотности, полярные коды и блочный код. Модуляция может относиться просто к квадратурной амплитудной модуляции (Quadrature Amplitude Modulation, QAM), смещенной QAM (offset QAM, OQAM), определяемой комплексной совокупностью (содержащей, например, способ и порядок модуляции, например, 16QAM, 64QAM и т.д.), или, более конкретно, к различным типам усовершенствованных способов модуляции, таким как иерархическая модуляция, многомерная модуляция, нелинейная модуляция и модуляция с низким отношением пиковой мощности к средней мощности (low Peak–to-Average Power Ratio, PAPR).
Поскольку радиоинтерфейс содержит множество компонентов или стандартных блоков и каждый компонент может иметь множество возможных технологий (также упоминаемых здесь как варианты возможностей радиоинтерфейса), диспетчер 300 радиоинтерфейса может конфигурировать и сохранять большое количество различных профилей радиоинтерфейса. Каждый профиль радиоинтерфейса определяет соответствующий набор вариантов возможностей радиоинтерфейса.
Например, в каждом профиле радиоинтерфейса, определяющем соответствующий набор вариантов возможностей радиоинтерфейса, вариант возможностей радиоинтерфейса выбирается для каждого из стандартных блоков радиоинтерфейса компонента. Каждый из различных профилей радиоинтерфейса может быть нацелен на удовлетворение различных наборов требований к передаче, включая контент передачи, условия передачи и условия приема.
В соответствии с требованиями передачи пары передающих-приемных устройств связи, один из множества профилей радиоинтерфейса, который наилучшим образом удовлетворяет требованиям передачи, может быть выбран диспетчером 300 радиоинтерфейса и использоваться для связи между парой устройств передатчика-приемника.
В дополнительных вариантах осуществления диспетчер 300 радиоинтерфейса может модифицировать или обновлять свои компоненты, профили или варианты возможностей. Например, диспетчер 300 радиоинтерфейса может заменить компоненты 305, 310 структуры сигнала и кадра на компонент 330 с единой нумерологией. Напротив, диспетчер 300 радиоинтерфейса может разделить компонент 325 модуляции и кодирования на индивидуальный компонент кодирования и индивидуальный компонент модуляции. Дополнительно, диспетчер 300 радиоинтерфейса может быть выполнен таким образом, чтобы новые компоненты программной конфигурации радиоинтерфейса, которые будут разработаны в будущем, были бы пригодны для использования.
Диспетчер 300 радиоинтерфейса может также обновлять некоторые компоненты, чтобы модифицировать варианты возможностей любого заданного компонента. Например, диспетчер 300 радиоинтерфейса может обновлять компонент 335 модуляции и кодирования, чтобы включить в него схемы более высокого порядка модуляции.
Обновляя хранящиеся компоненты, профили и варианты возможностей, диспетчер 300 радиоинтерфейса может гибко адаптироваться, чтобы лучше приспособить разнообразные услуги и типы беспроводного трафика к различным условиям беспроводного канала. Модификация или обновление компонентов, профилей и вариантов возможностей могут позволить диспетчеру 300 радиоинтерфейса обеспечить подходящие профили радиоинтерфейса для типов трафика или услуг помимо тех, которые уже рассмотрены для ультранадежной связи с низкой задержкой (ultra-reliable low latency communication, URLLC), улучшенную мобильную широкополосную связь (enhanced mobile broadband, eMBB) и массовую связь машинного типа (massive machine-type communication, mMTC).
В одном примере вышесказанное, связанное с диспетчером 300 радиоинтерфейса, также относится к возможностям базовой станции и возможностям UE, описанным в раскрытии. Таким образом, различные TPR с различными возможностями базовой станции могут содержать различные компоненты, или функции, раскрытые в диспетчере 300 радиоинтерфейса. Раскрытие ими не ограничивается.
Далее ссылка будет сделана на фиг. 5-10, которые поясняют различные примеры систем связи.
На фиг. 5 представлена интегрированная наземная и космическая система 400 связи, соответствующая варианту осуществления. Система 400 связи является примером трехмерной всесторонней системы связи.
Система 400 связи содержит множество UE 402a-402e, наземную TRP 404, многочисленные летательные TRP 406a-406c, 408 и многочисленные спутниковые TRP 410a-410b. Летательные TRP 406a-406c, 408 и спутниковые TRP 410a-410b являются примерами космических TRP. Хотя летательные TRP 406a-406c показаны как квадрокоптеры, а летательная TRP 408 показана как дирижабль, это является только примерами. Летательные TRP 406a-406c, 408 могут вместо этого быть реализованы, используя другие летательные устройства. В некоторых реализациях любые или все из летательных TRP 406a-406c, 408 являются дронами. UE 402a-402e могут быть наземными или космическими UE. Примеры UE, наземных TRP и космических TRP представляются здесь в другом месте. Количество и положение UE 402a-402e, наземной TRP 404, летательных TRP 406a-406c, 408 и спутниковых TRP 410a-410b показаны для примера на фиг. 5. Также предполагаются и другие количества и положения таких UE и TRP.
Любые или все летательные TRP 406a-406c, 408 могут иметь возможности базовой станции с низкими возможностями, со средними возможностями или с высокими возможностями. Для примера, летательные TRP 406a-406c могут быть дронами с низкими возможностями базовой станции, а летательная TRP 408 может быть дроном с высокими возможностями базовой станции.
В системе 400 связи наземная TRP 404 формирует наземную систему или подсистему связи, а летательные TRP 406a-406c, 408 и спутниковые TRP 410a-410b формируют космическую систему или подсистему связи. Зона или область, показанные на фиг. 5, могут содержать одну или более базовых станций системы 400 связи. UE 402b-402c находятся внутри покрытия наземной TRP 404, тогда как UE 402a, 402d-402e находятся за пределами покрытия наземной TRP 404. Поэтому UE 402a, 402d-402e обслуживаются космической системой или подсистемой связи. В некоторых вариантах осуществления наземная TRP 404 в системе 400 связи 400 может отсутствовать и в этом случае система 400 связи будет космической системой связи.
Система 400 связи содержит многочисленные различные типы TRP. Например, наземная TRP 404 может быть первым типом TRP, летательные TRP 406a-406c могут быть вторым типом TRP, летательная TRP 408 может быть третьим типом TRP и спутниковые TRP 410a-410b могут быть четвертым типом TRP. В некоторых реализациях летательные TRP 406a-406c содержат более одного типа TRP. В некоторых реализациях, одна или более TRP в системе 400 связи способны динамично переключаться между различными типами TRP. Это действие может сообщаться центральным узлом или, например, TRP с высокими возможностями базовой станции.
Система 400 связи представляет пример иерархической сети. Иерархическая сеть является сетью, которая делится на дискретные уровни или уровни. В космической системе связи, которая, как вариант, интегрируется с наземной системой связи, различные уровни могли определяться различными типами TRP и/или соответствующим диапазоном высот или диапазоном высот над поверхностью Земли, на которых работают различные типы TRP. Такая иерархическая сеть может также упоминаться как многоуровневое развертывание TRP. В примере иерархической сети первый уровень содержит наземные TRP, такие как базовые станции, второй уровень содержит низковысотные TRP, такие как TRP на квадрокоптерах, третий уровень содержит средневысотные и высотные TRP, такие как TRP на бортовых платформах и TRP на аэростатах, и четвертый уровень содержит спутниковые TRP.
На фиг. 5 показаны пунктирные линии, поясняющие многочисленные различные уровни системы 400 связи. Различные типы TRP реализуются на каждом уровне системы 400 связи, которая является примером многоуровневого развертывания TRP. Уровень 1 содержит наземную TRP 404, уровень 2 содержит летательные TRP 406a-406c, уровень 3 содержит летательную TRP 408 и уровень 4 содержит спутниковые TRP 410a-410b. В некоторых случаях, уровень 1 может также содержать любые из UE 402a-402e, в зависимости от состояния UE 402a-402e. Каждый из уровней 1, 2, 3 и 4 определяется соответствующим диапазоном высот или высот над поверхностью Земли. В примерной реализации системы 400 связи уровень 1 соответствует наземным TRP (например, высоты между 0-100 метрами над поверхностью Земли), уровень 2 соответствует низковысотным TRP (например, высоты между 101-1000 метров над поверхностью Земли), уровень 3 соответствует средневысотным TRP (высоты между 1001 м - 100 км над поверхностью Земли) и уровень 4 соответствует высотным и орбитальным TRP (например, высоты между 100 км и 2 000 км над поверхностью Земли). В других вариантах осуществления в иерархической системе связи может быть реализовано большее или меньшее количество уровней.
В системе 400 связи UE 402a имеет соединение со спутниковой TRP 410a; UE 402b имеет соединение со спутниковой TRP 410a, летательной TRP 406a и наземной TRP 404; UE 402c имеет соединение с наземной TRP 404 и летательной TRP 406b; UE 402е имеет соединение с летательной TRP 406b; UE 402e имеет соединение с летательной TRP 406c и спутниковой TRP 410b; летательная TRP 408 имеет соединение со спутниковыми TRP 410a-410b и летательными TRP 406a-406c; и наземная TRP 404 дополнительно имеет соединение с летательной TRP 406a и спутниковыми TRP 410a-410b.
В некоторых реализациях соединения с UE 402a-402e обеспечивают каналы управления и/или каналы передачи данных, а соединения между наземной TRP 404, летательными TRP 406a-406c, 408 и спутниковыми TRP 410a-410b обеспечивают релейные и/или транспортные соединения. Хотя соединения показаны с двуглавыми стрелками, следует понимать, что соединение не всегда может поддерживать двусторонние связи. Например, некоторые соединения могут быть предназначены для восходящей связи, а некоторые соединения могут быть предназначены для нисходящей связи.
Количество и расположение соединений на фиг. 5 показаны для примера. В некоторых реализациях эти соединения были сформированы после поиска всех возможных соединений в системе 400 связи и определения наиболее подходящих соединений для достижения требуемой услуги беспроводной связи. В целом, каждое из этих соединений рассматривается как вариантное и каждое соединение может быть активировано, деактивировано и/или переконфигурировано в зависимости от сетевых требований. В частности, расположение соединений может изменяться по мере того, как UE 402a-402e, летательные TRP 406a-406c, 408 и/или спутниковые TRP 410a-410b перемещаются во времени.
Механизмы, через которые осуществляется связь при каждом соединении в системе 400 связи, здесь не ограничиваются. В некоторых реализациях каждое соединение конфигурируется, основываясь на одном или более типах TRP. Например, для соединений, содержащих различные типы TRP, могут использоваться различные конструкции радиоинтерфейса. В некоторых реализациях каждое соединение конфигурируется, основываясь на соответствующем уровне системы 400 связи. Здесь различные радиоинтерфейсы используются для различных соединений между уровнями и/или различных соединений внутри уровней. Например, соединения между UE и TRP на уровне 1 могли быть конфигурированы в соответствии с радиоинтерфейсом, отличным от соединения между UE и TRP на уровнях 2, 3 и 4. В некоторых реализациях различные конструкции радиоинтерфейсов используются для каналов управления, каналов передачи данных, восходящих каналов, нисходящих каналов и/или транспортных каналов.
Система связи 400 содержит несколько примеров многочисленных одновременных соединений, сформированных для различных типов TRP. В одном примере UE 402b сформировал одновременные соединения со спутниковой TRP 410a, летательной TRP 406a и наземной TRP 404. Пакеты данных, которые передаются между UE 402b и спутниковой TRP 410a, летательной TRP 406a и наземной TRP 404, могут быть одинаковыми или различающимися.
В некоторых реализациях одна или более из летательных TRP 406a-406c, 408 и/или спутниковых TRP 410a-410b выполняют связную широковещательную передачу. Например, соединения со спутниковой TRP 410a могут предоставить широкополосный канал, который контролируется со стороны UE 402a, наземной TRP 404 и летательной TRP 408.
Многочисленные соединения с UE 402b могут позволить реализовывать функциональные возможности, которые будут совместно использоваться различными соединениями. Некоторые функции соединения могут выключаться, если возможно другое соединение для выполнения этих функций. Например, канал произвольного доступа (random access channel, RACH) может выключаться при соединении между UE 402b и спутниковой TRP 110a. Взамен предоставляется процесс RACH, обеспечивающий соединение между UE 402b и летательной TRP 406a и/или соединение между UE 402b и наземной TRP 404. Информация UE для UE 402b может передаваться от летательной TRP 406a или от наземной TRP 404 к спутниковой TRP 110a. Эта информация UE может содержать информацию о доступе, позицию UE и другие параметры или информацию, которые необходимы, например, для установления канала передачи между спутниковой TRP и UE. Передача информации UE между различными TRP может происходить через транспортные соединения. В некоторых вариантах осуществления транспортная связь между TRP может одновременно делиться информацией для группы UE, чтобы экономить на служебной сигнализации.
Решение о включении некоторых соединений в системе 400 связи и решение не включать другие соединения могут быть основаны на результатах измерений или на требованиях UE. Когда многочисленные возможные соединения доступны, UE будет искать набор из одного или более соответствующих соединений, который удовлетворяет требованиям UE. Как вариант, соединение может включаться или выключаться, основываясь на результатах измерений и отчетах, которые указывают качество канала для соединения. Примеры таких измерений, не создающие ограничений, содержат измерение сигнала синхронизации (например, принимаемой мощности), измерение нисходящего опорного сигнала (например, информация о состоянии канала (channel state information, CSI), RSSP, RSSI) и т.п., которые проводятся UE, и/или измерение преамбулы RACH, измерение восходящего опорного сигнала и т.п., которые проводятся TRP. Если результат измерения, соответствующего соединению, выходит за пределы заданного диапазона или находится ниже заданного порога, то соединение может быть выключено. Точно также, если результат измерения, соответствующего соединению, попадает в заданный диапазон или выше заданного порога, то соединение может быть включено. Это решение о включении и выключении может приниматься сетью, UE или ими обоими вместе. Когда многочисленные соединения между UE и одной TRP или многочисленные соединения между UE и многочисленными TRP удовлетворяют требованиям к результатам измерений, то есть, результаты измерений находятся в заданном диапазоне или выше заданного порога, UE может сообщить в сеть обо всех соединениях. В некоторых вариантах осуществления заданные пороги и диапазоны могут различаться для различных типов соединений, различных типов TRP и/или для различных уровней системы связи. Для примера, минимальный уровень принимаемой мощности для соединения со спутниковой TRP может быть ниже, чем минимальный уровень принимаемой мощности для соединения с наземной TRP. В некоторых вариантах осуществления пороги и диапазоны могут сообщаться между UE и сетью. Например, набор возможных значений порогов и диапазонов для каждого типа соединения может быть задан или сообщаться. Сеть (или UE) может решать, какое значение из набора использовать, и сообщать значение к UE (или сети) посредством широковещательной передачи, многоадресной или одноадресной передачи сигнализации на физическом уровне, уровне MAC, уровне RRC или любом их сочетании.
Например, в системе 400 связи UE 402d может не формировать соединение с летательной TRP 460c, поскольку результаты измерений для этого соединения лежат ниже заданного порога. Решение о включении определенных соединениях в системе 400 связи может также или вместо этого быть основано на функционально обеспечиваемой другими соединениями нагрузке трафика каждого соединения, типе обслуживания, доступной мощности передачи UE или любом их сочетании. Например, UE 402d может не формировать соединение с летательной TRP 406c, поскольку соединение с летательной TRP 406b обеспечивает все функциональные возможности, которые требуются для UE 402d.
Система 400 связи позволяет UE выполнять передачу управления между различными типами TRP, такими как, например, наземные TRP, летательные TRP и спутниковые TRP. В результате передачи управления, соединение UE с одним из типов TRP переключается на соединение с другим типом TRP. Во время передачи управления для UE может назначаться или не назначаться новый идентификатор UE, например, такой как временный идентификатор радиосети (RNTI). В некоторых вариантах осуществления UE использует один и тот же идентификатор до и после передачи управления. В других вариантах осуществления для UE во время передачи управления присваивается по меньшей мере один новый идентификатор. Для примера, UE 402a может выполнить передачу управления, чтобы переключиться со связи со спутниковой TRP 410a на связь с летательной TRP 406a. Порог измерения также может быть сообщен от сети к UE. В одном из примеров сеть сообщает абсолютные пороговые значения для каждой подсистемы. В другом примере сеть сообщает одно абсолютное пороговое значение и одно или более пороговых значений смещения, возможно вместе с указанием соответствующей подсистемы. Одно абсолютное пороговое значение может напрямую применяться к одной указанной подсистеме. Для остальных подсистем одно абсолютное значение используется в качестве опорного значения и объединяется с соответствующим значением смещения. Или одно абсолютное значение используется в качестве опорного значения и объединяется с соответствующим значением смещения для всех подсистем.
В некоторых вариантах осуществления передача управления соединением основана на характеристиках соединения. Например, если соединение между UE 402d и летательной TRP 406c демонстрирует более высокую принимаемую мощность, чем соединение между UE 402d и летательной TRP 406b, то передача управления от летательной TRP 406b к летательной TRP 406c может быть выполнена в UE 402d. В некоторых случаях смещение может быть определено для уменьшения количества ненужных передач управления. Например, передача управления от летательной TRP 406b к летательной TRP 406c на UE 402 выполняется, только если принимаемая мощность на летательной TRP 406c превышает принимаемую мощность на летательной TRP 406b на заданную величину смещения мощности. В некоторых вариантах осуществления, в течение периода передачи управления соединением могут сохраняться два соединения, например, соединение с летательной TRP 406b и соединение с летательной TRP 406c перед отключением сигнализации, например, когда на UE принимается отключение соединения с летательной TRP 406b.
В некоторых вариантах осуществления, реализация и отключение соединений основываются на доступности ресурса соединений. Если ресурсы для конкретного соединения недостаточны, то соединение может быть отключено или просто не включаться с самого начала. Некоторые функции соединения могут вместо этого включаться и/или выключаться, основываясь на доступности ресурса, вместо того, чтобы включать и/или выключать все соединение. Решение о включении и отключении может приниматься сетью или UE. Например, количество соединений со спутниковой TRP 410a-410b и/или функциональные возможности, которые включаются для каждого из этих соединений, могут ограничиваться, чтобы зарезервировать сетевые ресурсы для спутниковых TRP 410a-410b на случай, когда они будут необходимы.
В некоторых реализациях каждое из UE 402a-402e, летательных TRP 406a-406c, 408 и/или спутниковых TRP 410a-410b может быть конфигурировано с множеством соединений, которые должны контролироваться. Контроллер в системе 400 связи может динамически конфигурировать, как контролировать множество соединений и/или включать их посредством UE или оконечного устройства. Этим контроллером может быть, например, TRP с высокими возможностями базовой станции. Сигнализация между контроллером и UE может указывать, как должны контролироваться и/или включаться на UE множество соединений. Количество контролируемых и/или включаемых соединений может зависеть от потребностей сети и требований UE. В целом, большее количество соединений не всегда лучше с точки зрения устройства или сети. Например, дополнительные соединения могут требовать большего объема служебной сигнализации, электропитания и повторения сигнализации на UE и/или TRP. Если эти дополнительные соединения необязательны для удовлетворения требований UE к услугам, то эти дополнительные соединения только добавляют издержки в сети, и потребление электропитания на UE может быть отключено. Соединение между UE и TRP может включаться и/или конфигурироваться, используя сигнализацию управления радиоресурсами (radio resource control, RRC) (например, запрос соединения RRC).
Система 400 связи может использовать явную и/или неявную сигнализацию, чтобы конфигурировать количество соединений, подлежащих контролю. Сигнализация может также конфигурировать реализацию и отключение некоторых соединений. Например, наземная TRP 404 или космическая TRP с высокими возможностями базовой станции может передавать сигнализацию, чтобы конфигурировать контроль, установление и отключение строя соединений. Эта сигнализация может передаваться по транспортным соединениям и/или релейным соединениям, чтобы достигать UE или TRP в системе 400 связи.
Механизм сигнализации может использоваться для включения или выключения определенных функций соединения. Механизм сигнализации определяет параметры и схемы передачи, в том числе, например, форму сигнала, нумерологию и структуру кадра. В некоторых вариантах осуществления используется явная сигнализация, чтобы указывать включение или отключение соединения или функции. Специализированная передача содержит по меньшей мере одно из следующего: сигнализация, передаваемая по широковещательному каналу, специализированная сигнализация RRC, сигнализация управления доступом к среде (medium access control, MAC) или информация для управления нисходящим каналом физического уровня. Например, специализированная передача может посылаться на UE и/или TRP, чтобы указать, что соединение или функция должны быть включены или выключены. В некоторых вариантах осуществления неявная сигнализация используется для указания блокирования или разблокирования соединения или функции. Например, может быть определена связь между заданными установками и типами соединения, затем тип соединения может быть неявно сообщен посредством связи с заданными установками. Заданная установка может содержать форму сигнала, нумерологию и структуру кадра. Например, когда для различных типов соединений определяются различные формы сигнала, UE будет знать, что оно соединяется со спутником, когда UE обнаруживает, какая используется форма сигнала из заданного набора форм сигналов и принадлежит TRP спутникового типа. Следовательно, тип соединения неявно указывается формой сигнала и издержки на явную сигнализацию экономятся. В других примерах заданная установка содержит различные структуры канала синхронизации, которые могут являться различными последовательностями или различными распределениями/отображениями частотно-временных ресурсов или различными образцами блока сигнала синхронизации (synchronization signal block, SSB). Различные структуры канала синхронизации связываются с различными типами соединений. В еще одном примере заданная установка содержит по меньшей мере одно из следующего: различные центральные несущие частоты, различные рабочие полосы частот или различные рабочие спектры. Различные типы соединений могут быть связаны с различными центральными несущими частотами, различными рабочими полосами частот или различными рабочими спектрами.
Следует заметить, что хотя UE 402b имеет три соединения, по меньшей мере, некоторые из этих соединений не всегда могут использоваться. Связь может осуществляться через соединение (-х), которое демонстрирует наилучшие характеристики (например, имеет наилучшие результаты измерений). Например, если соединение между UE 402b и наземной TRP 404 демонстрирует низкий RSRP, то соединения с летательной TRP 406a и спутниковой TRP 410a могут использоваться вместо него, чтобы обслуживать UE 402b. Такая гибкость может предоставлять для UE 402b более надежное обслуживание.
Одно или более UE 402a-402e могут выполнять операции обнаружения TRP и идентификации прежде, чем сформировать соединения, показанные на фиг. 5. Эти операции могут, например, позволить UE определять тип TRP, определять иерархический уровень, на котором действует TRP и/или определять систему или подсистему связи, в которой действует TRP. UE может определить тип TRP, основываясь на одном или более из следующего:
• Каналы сигнала синхронизации (SYNC), которые искало UE. Например, различные типы TRP могут иметь различные структуры сигнала синхронизации, которые могут содержать различные последовательности, различное распределение/отображение частотно-временных ресурсов и/или различные модели SSB.
• Несущая частота или заданный спектр канала и ширина полосы пропускания.
• Сигнализация, передаваемая по широковещательному каналу.
• Выделенная сигнализация RRC, сигнализация MAC и/или информация управления нисходящего канала физического уровня. Информация управления нисходящего канала физического уровня может быть общей для UE или специальной для UE.
Одно или более UE 402a-402e могут выполнять операции обнаружения соединения и идентификации перед тем, как формировать соединения, показанные на фиг. 5. Эти операции, которые могут быть подобны операциям обнаружения и идентификации TRP, обсуждавшиеся выше, могут позволить UE обнаруживать потенциальное соединение с TRP и идентифицировать тип соединения. Не создающими ограничений примерами различных типов соединений являются соединения с различными типами TRP и соединения с различными уровнями системы связи (в случае иерархической системы связи, имеющей много уровней). В некоторых вариантах осуществления операция обнаружении и идентификации соединения содержит использование одного или более из следующего: определение конкретного для соединения канала доступа (например, канал произвольного доступа (random access channel, RACH)), конкретные для соединения структуры радиоинтерфейсов, конкретный для соединения физический уровень (physical layer, PHY) и/или конкретная для соединения синхронизация SYNC. Термин «конкретный для соединения» относится к тому, что должно быть конкретным для определенного типа соединения.
Структуры PHY могут содержать структуру или образец отображения частотно-временного ресурса для канала данных, канала управления и пилотного/измерительного канала. Структуры PHY могут также содержать последовательность, используемую для скремблирования канала передачи данных, канала управления и пилотного/измерительного канала; последовательность работы пилотного/измерительного канала; и область поиска каналов управления. SYNC может иметь определенная последовательность, модель SSB, и/или распределение частотно-временных ресурсов, которое может отличать RACH для одного типа соединения от других типов соединений. Точно также, RACH может иметь определенную последовательность и/или распределение частотно-временных ресурсов, которые могут отличать RACH одного типа соединения от других типов соединений. Радиоинтерфейс может иметь определенная конфигурация радиоинтерфейса, которая может отличать радиоинтерфейс для одного типа соединения от радиоинтерфейса для других типов соединений, включая, но не ограничиваясь только этим, компонент формы сигнала, компонент структуры кадра, компонент схемы мультидоступа, компонент протокола, компонент модуляции и кодирования и любое сочетание по меньшей мере двух из этих компонентов. Структуры SYNC, RACH, радиоинтерфейсов и любое их сочетание также являются частью структур PHY.
Определение конкретных для соединения канала доступа, радиоинтерфейса, уровня PHY или SYNC может иметь определенную последовательность, образец SSB и/или распределение частотно-временных ресурсов, которые могут отличать определение канала доступа, радиоинтерфейс, PHY или SYNC для одного типа соединения от других типов соединений. Для примера UE может использовать конкретные для соединения определение канала доступа, радиоинтерфейс, PHY или SYNC, чтобы идентифицировать тип соединения и отличить данное соединение от других типов соединений.
Для каждого соединения между UE и TRP в системе 400 связи UE может определять тип TRP, используя канал SYNC, сигнализацию, передаваемую по широковещательному каналу, и/или выделенную UE сигнализацию от других TRP. В некоторых реализациях конкретное для соединения определение канала доступа, конкретный для соединения радиоинтерфейс, конкретный для соединения PHY, конкретная для соединения SYNC и/или конкретный для соединения RACH используются для UE, чтобы обнаружить и идентифицировать определенное соединение с определенной TRP.
Рассмотрим, например, соединения с UE 402b. Соединение со спутниковой TRP 410a могут иметь определенная последовательность, образец SSB и/или распределение частотно-временных ресурсов, которое конкретно для соединения со спутниковой TRP 410a или для соединения с любой спутниковой TRP в системе 400 связи. UE 402b может использовать эту конкретную последовательность, образец SSB и/или распределение частотно-временных ресурсов, чтобы обнаружить соединение и идентифицировать соединение, как относящееся к спутниковой TRP. Точно также, соединения с летательной TRP 406a и наземной TRP 404 могут иметь соответствующие последовательности, образцы SSB и/или соответствующие распределения частотно-временных ресурсов, которые являются конкретными для этих соединений или для соединений с любыми летательными TRP и наземными TRP в системе 400 связи.
В некоторых реализациях два или более типов соединений могут совместно использовать одну и ту же последовательность, такую как, например, последовательность SYNC или последовательность RACH. Для примера, наземная TRP 404 и летательная TRP 406a совместно используют одну и ту же последовательность, такую как последовательность SYNC или последовательность RACH, в то время как спутниковая TRP 410a использует другую последовательность. Поэтому, основываясь на этих последовательностях, UE 402b способно различить спутниковую TRP 410a и наземную TRP 404, но не способно различить наземную TRP 404 и летательную TRP 406a.
В некоторых реализациях система 400 связи может соединиться с многочисленными различными секциями базовой сети. Спутниковые TRP, бортовые TRP , аэростатные TRP, наземные TRP и квадрокоптерные TRP с высокими возможностями базовой станции могут индивидуально соединяться с одной и той же или с разными секциями базовой сети, чтобы сформировать интегрированную наземную и космическую систему связи. Интегрированная наземная и космическая система 400 связи может дополнительно подразделяться на подсистемы. Например, спутниковые TRP соединяются с первой секцией базовой сети, бортовые TRP и аэростатные TRP соединяются со второй секцией базовой сети, квадрокоптерные TRP с высокими возможностями базовой станции соединяются с третьей секцией базовой сети и наземные TRP соединяются с четвертой секцией базовой сети. Также могут существовать четыре подсистемы интегрированной наземной и космической системы связи, а именно, спутниковая подсистема, бортовая подсистема, низковысотная летательная подсистема и наземная подсистема. Эти четыре подсистемы могут соответствовать, например, уровням 1, 2, 3 и 4 в системе 400 связи. Подсистема, как вариант, может дополнительно иметь меньшей мере одну квадрокоптерную TRP с низкими и средними возможностями базовой станции, которая будет находиться под управлением спутника, бортовой платформы/аэростата, или другую квадрокоптерную TRP с высокими возможностями базовой станции или под управлением наземной TRP, чтобы предоставлять услуги связи для наземных или космических UE.
Различные подсистемы могут иметь одинаковые или разные структуры физических каналов и физических сигналов. Например, спутниковая подсистема может использовать только сигнал с модуляцией BPSK и форму сигнала импульсного типа с большим защитным интервалом для связи, поскольку расстояние между спутником и UE чрезвычайно большое. С другой стороны, бортовая подсистема может использовать форму сигнала с модуляцией до 16QAM и OFDM со средним защитным интервалом для связи, поскольку расстояние между бортовой платформой/аэростатом и UE составляет порядка 1-100 км. Низковысотная летательная подсистема и наземная подсистема могут форму сигнала с модуляцией до 256QAM и OFDM с малым защитным интервалом для связи, поскольку расстояние мало.
Различные подсистемы могут иметь различные структуры для сигналов синхронизации, каналов RACH, конфигураций радиоинтерфейсов, опорных сигналов или каналов передачи данных. Для сигналов синхронизации различные подсистемы могут иметь различные структуры последовательностей (в том числе, различные последовательности одного и того же типа последовательности), образцов SSB и/или выделений частотно-временных ресурсов. Для каналов RACH различные подсистемы могут иметь различные структуры последовательностей и/или различные выделения частотно-временных ресурсов. Для конфигураций радиоинтерфейсов различные подсистемы могут иметь различные конфигурации, например, по меньшей мере с одним из следующего: форма сигнала, схема мультидоступа, схема модуляции и кодирования, структура кадра, интервал между поднесущими и длительность символов. Для опорных сигналов различные подсистемы могут быть различные структуры последовательностей, типы опорных сигналов и/или выделения частотно-временных ресурсов. Для каналов передачи данных различные подсистемы могут иметь различные выделения частотно-временных ресурсов, правила отображения и/или схемы передачи. Например, низколетательная подсистема и наземная подсистема могут совместно использовать одну и ту же структуру сигнала синхронизации и одну и ту же конфигурацию радиоинтерфейса, но другие выделения частотно-временных ресурсов для канала RACH.
В интегрированной наземной и космической системе связи любые из вышеупомянутых 4 подсистем могут отсутствовать. Например, может отсутствовать наземная подсистема. В другом примере присутствует только низковысотная летательная подсистема. В третьем примере, существуют только наземная подсистема, спутниковая подсистема и низковысотная летательная подсистема. В четвертом примере спутниковая подсистема отсутствует. В дополнительных примерах, которые обсуждаются ниже, может предполагаться, что все вышеупомянутые 4 подсистемы существуют. Однако, следует понимать, что принципы построения для этих примеров могут применяться независимо от того, присутствуют ли все 4 подсистемы или определены ли дополнительные типы подсистем.
Интегрированная система 400 позволяет выполнять перекрестные передачи управления системами или подсистемами. Перекрестные передачи управления системами или подсистемами относятся к UE, переключающемуся от соединения с TRP в одной системе или подсистеме связи к соединению с TRP в другой системе или подсистеме связи. В результате передачи управления предыдущее соединение выключается. В одном из примеров UE, осуществляющее связь с наземной TRP, переключается на связь с космической TRP в результате перекрестной передачи управления системами/подсистемами. В другом примере UE, которое осуществляет связь с космической TRP, переключается на осуществление связи с наземной TRP в результате перекрестной передачи управления системами/подсистемами. Во время перекрестной передачи управления системами или подсистемами UE может или не может быть присвоен новый идентификатор UE, например, такой как временный идентификатор радиосети (radio network temporary identifier, RNTI). В некоторых вариантах осуществления UE использует один и тот же идентификатор до и после перекрестной передачи управления системами или подсистемами. В других вариантах осуществления во время перекрестной передачи управления подсистемами или системами для UE присваивается по меньшей мере один новый идентификатор. Для примера, UE 402a может выполнить передачу управления, чтобы переключить осуществление связи со спутниковой TRP 410a на спутниковую TRP 410a. В результате UE 402a может переключиться на осуществление связи исключительно с космической системы связи или подсистемы связи на осуществление связи исключительно с наземной системой или подсистемой связи.
Если соединение с подсистемой выключается (например, соединение с TRP в этой подсистеме выключается), включенная подсистема может получать информацию UE и передавать информацию UE выключенным подсистемам. Информация UE может содержать следующую информацию: позиционная информация, информация о перемещении, идентификатор (ID) UE, тип трафика данных и требования по качеству обслуживания (quality of service, QoS). Эта информация может быть полезна для обеспечения быстрого включения подсистемы, когда это необходимо. Информация UE для множества UE может быть упакована в одно сообщение. Информация UE может направляться группе TRP в выключенной подсистеме.
Использование космических TRP, таких как летательные TRP, может уменьшить частоту обновления временного опережения (timing advance, TA) по сравнению с наземными TRP. В наземной системе связи перемещение UE может потребовать, чтобы TA для UE изменялось для компенсации изменения расстояния между UE и наземной TRP. В космической системе связи перемещения UE и/или космических TRP также будут изменять расстояние между UE и космическими TRP. Однако, это изменение расстояния может быть меньшим, чем изменение расстояния для наземной TRP, что означает, что TA может изменяться менее часто.
Например, рассмотрим случай, в котором летательная TRP располагается на высоте 50 метров непосредственно над наземным UE и наземная TRP находится на расстоянии 50 метров к северу от UE. UE затем перемещается на 50 метров к югу. Это приводит в результате к изменению расстояния между UE и наземной TRP приблизительно на 50 метров. Для летательной TRP оборудование UE теперь находится на расстоянии приблизительно 71 метр, что составляет изменение расстояния на 21 метр между UE и летательной TRP. Поэтому, на основании трехмерного характера некоторых космических систем связи, перемещения UE и/или космических TRP могут приводить в результате к меньшим изменениям расстояния по сравнению с наземными системами связи. Следовательно, в космических системах связи может использоваться более низкая частота обновления TA, что в результате может приводить к экономии электропитания.
Частота обновления TA в некоторых реализациях может зависеть от типа TRP. Например, космические TRP, которые работают на больших высотах, могут иметь более низкие частоты обновления TA, чем TRP, работающие в более низких высотах, поскольку изменения расстояния для высотных космических TRP может быть меньше, чем для низковысотных TRP и наземных TRP.
В одном из примеров низкая частота обновления TA может быть определена для бортовой подсистемы или спутниковой подсистемы, средняя частота обновления TA может быть определена для низковысотной летательной подсистемы и высокая частота обновления TA может быть определена для наземной подсистемы. Обновление TA инициируется TRP. TRP может конфигурировать таймер истечения срока обновления TA в UE. Таймер истечения срока может устанавливаться в исходное состояние, когда UE сообщает TRP о своем последнем TA. Когда установленное время таймера истечения срока заканчивается с его последнего сообщения TA, UE рассмотрит, терялась ли синхронизация с TRP и будет ли выполнять процесс RACH, чтобы восстановить синхронизацию с TRP и обновить TA. Различные типы подсистем могут иметь отдельные конфигурации для таймера истечения срока, чтобы обновлять TA на UE. Например, таймер истечения срока для обновления TA на бортовой подсистеме или спутниковой подсистеме может быть конфигурирован с большим значением, таймер истечения срока для обновления TA на низковысотной летательной подсистеме может быть конфигурирован со средним значением, и таймер истечения срока для обновления TA в наземной подсистеме может быть конфигурирован с низким значением.
Значение TA и его диапазон в значительной степени могут определяться расстоянием и соответствующей флюктуацией расстояния между TRP и UE. Для спутниковой подсистемы изменения TA могут быть очень малыми, так как расстояние уже чрезвычайно большое и флюктуации будут иметь относительно малое значение. Это означает, что для спутниковой подсистемы может быть определено наименьшее количество битов, чтобы сигнализировать TA, или может быть определена самая тонкая гранулярность (например, когда для каждой подсистемы определяется равное количество битов, чтобы сигнализировать TA). Точно также, второе наименьшее количество битов или вторая самая тонкая гранулярность для сигнализации TA могут быть определены для бортовой подсистемы. Третье наименьшее количество битов или третья самая тонкая гранулярность для сигнализации TA могут быть определены для низковысотной летательной подсистемы. Наибольшее число битов или наибольшая гранулярность для сигнализации TA могут быть определены для наземной подсистемы.
Обращаясь для примера к системе 400 связи, соединение между UE и космической TRP может иметь более низкую частоту обновления TA, чем соединение между UE и наземной TRP 404. Например, когда UE 402c перемещается в направлении наземной TRP 404 или от нее, это приводит в результате к изменению расстояния между UE 402c и наземной TRP 404, что может потребовать обновления TA. Это перемещение UE 402c может также привести в результате к изменению расстояния между UE 402c и летательной TRP 406b. Однако, поскольку летательная TRP 406b находится выше UE 402c, это может привести в результате к меньшему общему изменению расстояния между UE 402c и летательной TRP 406c по сравнению с изменением расстояния между UE 402c и наземной TRP 404. Поэтому частота обновления TA для соединений между UE и космической TRP может быть ниже, что будет приводить в результате к экономии электропитания.
Система 400 связи может, по меньшей мере частично, самоорганизовываться и/или самооптимизироваться. Самоорганизация содержит активное развертывание и позиционирование летательных TRP. Самоорганизация также содержит конфигурацию соединений между TRP и UE. Самоорганизация дополнительно содержит формирование релейных связей, используя многочисленные TRP, и определяет количество релейных узлов на релейных линиях. Самоорганизация может относиться к самоформированию. Самооптимизация содержит активное улучшение соединений в пределах наземной и/или космической системы связи. Например, одно или более соединений от UE до наземной и/или космической TRP может динамично включаться, выключаться и/или переконфигурироваться, чтобы улучшить предоставление услуг для UE. Кроме того, радиоинтерфейс может быть активно конфигурирован, чтобы улучшить связь с UE.
Две или более летательные TRP 406a-406c, 408 в системе 400 связи могут формировать группу или флот космических TRP. Группа космических TRP будет обычно действовать совместно скоординированным способом, чтобы выполнить одну или более операций в системе связи. В некоторых реализациях самоорганизация и самооптимизация в группе космических TRP могут выполняться путем сотрудничества между различным космическими TRP. Эти самоорганизация и/или самооптимизация могут выполняться распределенным способом, при котором не существует никакого центрального узла, управляющего каждой космической TRP в группе. Вместо этого космические TRP для координации своих действий связываются друг с другом внутри группы.
В некоторых реализациях самоорганизация и/или самооптимизация координируются центральным узлом в системе 400 связи. Например, две или более летательных TRP 406a-406c, 408 формируют группу TRP, которая управляется и координируется центральным узлом. Этот центральный узел может быть любой летательной TRP 406a-406c, 408, которая обладает высокими возможностями базовой станции. Центральный узел может также или вместо этого быть одной из спутниковых TRP 410a-410b или наземной TRP 404. В некоторых случаях система 400 связи содержит многочисленные центральные узлы. UE 402a-402e могут соединяться напрямую с центральным узлом или соединиться с центральным узлом через релейное соединение, содержащее один или более релейных узлов. Количеством релейных узлов в релейном соединении может динамически управлять центральный узел.
В некоторых реализациях летательные TRP 406a-406c находятся полностью под управлением центрального узла. Например, летательная TRP 408 может действовать как центральный узел для летательных TRP 406a-406c и поэтому в соединениях между летательными TRP 406a-406c нет никакой необходимости.
В некоторых вариантах осуществления пространство поиска нисходящей управляющей информации (DCI) и/или структура со слепым декодированием конфигурируются для группы космических TRP. Например, когда многочисленные космические TRP находятся под управлением центрального узла и действуют совместно для обслуживания UE через многочисленные соединения с UE, UE может потребоваться обнаруживать DCI для планирования передачи данных к каждой из многочисленных космических TRP или от них. Для каждой из многочисленных космических TRP центральный узел может конфигурировать (например, через выделенную сигнализацию RRC или широковещательную передачу) по меньшей мере одно из следующего: пространство поиска DCI, количество попыток слепого декодирования, распределение частотно-временных ресурсов для поиска DCI, информация, относящаяся к соответствующему антенному порту, индикатор TRP, используемый для передачи данных, запланированных в DCI, индикатор TRP, используемого для передачи DCI, и т.д. Индикатор TRP может содержать, например, идентификатор TRP, положение TRP, тип TRP и/или центральную несущую частоту TRP. Космическая TRP может принимать и передавать эти конфигурации к UE. Сигнализация DCI или управления доступом к среде (medium access control, MAC) или некоторое сочетание их обоих могут использоваться дополнительно, чтобы обновить часть или все вышеупомянутые конфигурации. Сигнализация DCI и MAC могут передаваться от центрального узла к одной или более космическим TRP и затем от этих одной или более космических TRP к UE. В группе многочисленных космических TRP DCI для каждой из космических TRP может передаваться от одного и того же TRP. Альтернативно, DCI может передаваться от другой TRP для каждой из космических TRP. Когда DCI для планирования передачи данных для многочисленных космических TRP передаются от одной и той же TRP, конфигурированные пространства поиска DCI могут использоваться совместно для этих DCI, если они имеют одинаковый размер полезной нагрузки.
Одна DCI может содержать один или более элементов канала управления (control channel element, CCE). Количество CCE, агрегированных для одной DCI, называется уровнем агрегации. Уровень агрегации может отличаться для обработки различных типов каналов. При одной структуре размер частотно-временного ресурса, который занимает один CCE, может быть одинаковым. Уровень агрегации кандидатов с различных уровней агрегации должен декодироваться вслепую и множество попыток слепого декодирования должны присваиваться каждому уровню агрегации кандидатов. Для различных типов подсистем определение CCE и/или набора уровней агрегации кандидатов могут различаться. Уровни агрегации кандидатов могут иметь наибольшее значение для спутниковой подсистемы, и уровни агрегации кандидатов могут иметь второе по величине значение для бортовой подсистемы. Например, набор уровней агрегации кандидатов может быть определен как {1, 2, 4, 8, 16, 32} для наземной подсистемы и низковысотной летательной подсистемы, набор уровней агрегации кандидатов может быть определен как {16, 32, 64} для бортовой подсистемы и набор уровней агрегации кандидатов может быть {128, 256} для спутниковой подсистемы. В некоторых реализациях различные наборы уровней агрегации кандидатов могут также использоваться для наземной подсистемы и низковысотной летательной подсистемы. Различные наборы уровней агрегации кандидатов могут частично перекрываться по значениям или могут не перекрываться по значениям для различных типов подсистем. В другом примере набор уровней агрегации кандидатов может быть одинаковым для различных типов подсистем, в то время как размер частотно-временного ресурса, занятого одним CCE, может отличаться для различных типов подсистем. Например, набор уровней агрегации кандидатов может быть определен как {1, 2, 4, 8} для всех 4 подсистем, один CCE может занимать 36 элементов ресурса для наземной подсистемы и низковысотной летательной подсистемы, один CCE может занимать 72 элемента ресурса для бортовой подсистемы и один CCE может занимать 288 элементов ресурса для спутниковой подсистемы. В другом примере для различных типов подсистема могут быть приняты другие схемы отображения ресурса. Например, для спутниковой подсистемы и для бортовой подсистемы может быть принято распределенное отображение CCE в физических частотных ресурсах, чтобы получить выигрыш от частотного разброса, в то время как локализованное отображение CCE в физических частотных ресурсах может быть принято для наземной подсистемы и низковысотной летательной подсистемы, чтобы получить выигрыш при планировании частот. В еще одном примере для различных подсистем могут быть определены различные количества попыток слепого декодирования. Например, чем больше попыток слепого декодирования может быть определено для наземной подсистемы и низковысотной летательной подсистемы, тем меньше попыток слепого декодирования может быть определено для бортовой подсистемы и наименьшее количество попыток слепого декодирования может быть определено для спутниковой подсистемы.
Когда система связи хочет уведомить UE о подключении соединений к конкретному типу подсистемы, для UE может явно сообщаться сигнализация о типе подсистемы. Если различные типы подсистемы связываются с различными структурами в пространстве поиска DCI и слепым декодированием, то эти связанные структуры неявно сообщаются UE, когда явно сообщается тип подсистемы. В другом примере, когда UE успешно ищет сигналы синхронизации во время начального этапа поиска ячейки, оно может распознать тип подсистемы через разыскиваемые сигналы синхронизации и затем связанные структуры пространства поиска DCI и слепого декодирования для того типа подсистемы также могут быть неявно сообщены. Используя этот способ, можно значительно понизить издержки на сигнализацию. Затем UE может запустить слепое обнаружение DCI в соответствии с этими связанными структурами. Альтернативно, структура, связанная с пространством поиска DCI и слепым декодированием, может быть явно сообщена UE. В одном из примеров сигнализация, несущая информацию о структуре, связанную с пространством поиска DCI и слепым декодированием, может предоставляться вместе с индикатором типа подсистемы при подключении соединения к подсистеме.
В некоторых реализациях системы 400 связи наземная TRP 404 и спутниковые TRP 410a-410b формируют первичную или основную систему связи. Летательные TRP 406a-406c, 408 затем развертываются, основываясь на потребностях сети в определенных местах или областях. После развертывания летательные TRP 406a-406c, 408 могут самоорганизовываться в структуру, показанную на фиг. 5. Летательные TRP 406a-406c, 408 могут также или вместо этого самооптимизироваться, чтобы обеспечить требуемый или соответствующий уровень услуг беспроводной связи для UE 402a-402e. В некоторых реализациях летательная TRP 408 действует в качестве центрального узла, чтобы координировать развертывание, перемещение и конфигурацию других летательных TRP 406a-406c.
Рассмотрим, например, ситуацию, в которой система 400 связи предназначается для обслуживания концерта на открытом воздухе, который проводится в сельской местности. Сельская местность обычно безлюдна и поэтому наземная система связи в этой местности не способна поддерживать большое количество пользователей (например, имеется только одна наземная TRP 404). Хотя спутники TRP 410a-410b могут обеспечивать связью некоторое количество дополнительных пользователей в сельской местности, этого все же может быть недостаточно, чтобы предоставить соответствующий уровень обслуживания всем посетителям концерта. По существу, летательные TRP 406a-406c, 408 развертываются и распределяются в сельской местности так, чтобы улучшить покрытие беспроводной связью и качество обслуживания в сельской местности, обеспечивая, таким образом, расширение обслуживания. В некоторых реализациях летательная TRP 408 является дирижаблем, который несет на себе другие летательные TRP 406a-406c для сельской местности, поскольку дирижабль может иметь большую дальность полета, чем другие летательные TRP 406a-406c. Когда летательная TRP 408 достигает сельской местности, TRP 406a-406c развертываются и самоорганизуются и самооптимизируются в системе 400 связи, показанной на фиг. 5. По меньшей мере, некоторые из TRP 406a-406c могли бы вместо этого транспортироваться в сельскую местность по земле, например, используя грузовик, и развертываться с грузовика. Система может подавать сигнал, чтобы указать расположение летательных TRP, настройки транспортного канала, соединение многоугольником/установку маршрута (например, сколько транзитных участков) и взаимные соединения между летательными TRP. Летательной TRP может быть известна такая информация.
На фиг. 6 представлена интегрированная система 500 наземной и космической связи, соответствующая другому варианту осуществления. Система 500 связи является другим примером трехмерной всесторонней системы связи. Система 500 связи содержит многочисленные UE 502a-502d, наземную TRP 504, множество летательных TRP 506a-506d, 508 и многочисленные спутниковые TRP 510a-510b. На фиг. 6 пунктирные линии поясняют многочисленные различные уровни системы 500 связи. Эти уровни могут быть выполнены аналогично уровням системы 400 связи.
Каждая из многочисленных двуглавых стрелок на фиг. 6 представляет беспроводное соединение. Конкретно, UE 502a имеет соединение со спутниковой TRP 510a и с летательной TRP 506a; UE 502b имеет соединение с наземной TRP 504; UE 502c имеет с летательной TRP 506d; UE 502d имеет соединение со спутниковой TRP 510b; летательная TRP 508 имеет соединение со спутниковой TRP 510a и с летательной TRP 506c; наземная TRP 504 дополнительно имеет соединение с летательной TRP 506b; летательная TRP 506a дополнительно имеет соединение с летательной TRP 506b; и летательная TRP 506c дополнительно имеет соединение с летательной TRP 506d.
Система 500 связи показывает примеры релейных соединений с многочисленными релейными узлами. В одном из примеров UE 502a имеет соединение с наземной TRP 504 через релейное соединение, которое содержит летательные TRP 506a-506b. Летательные TRP 506a-506b действует как релейные узлы в этом релейном соединении. Чтобы пакет данных прошел от UE 502a к наземной TRP 504 или наоборот, пакет данных передается летательными TRP 506a-506b. В другом примере UE 502c имеет соединение с летательной TRP 508 через релейное соединение, которое содержит летательные TRP 506c-506d. Летательная TRP 508 может быть центральным узлом и/или TRP с высокой емкостью базовой станции, который обеспечивает услугу беспроводной связи для UE 502c. Летательные TRP 506c-506d действует как релейные узлы в релейном соединении между UE 502c и летательной TRP 508. Система 500 связи может быть сформирована, используя при необходимости настройку релейных соединений, которая также относится к самоорганизации многоугольной структуры. В некоторых реализациях самоорганизация многоугольной структуры ведет поиск релейных соединений, имеющих наименьшее количество релейных узлов.
В системе 500 связи летательная TRP 508 может соединяться с базовой сетью любым из множества различных способов. Например, летательная TRP 508 может иметь прямое соединение с базовой сетью. Альтернативно, наземная TRP 504 и/или спутниковые TRP 510a-510b могут иметь прямое соединение с базовой сетью, позволяя летательной TRP 508 соединяться с базовой сетью через беспроводное соединение.
В системе 500 связи наземная TRP 504 не формирует соединение с летательной TRP 508. Например, соединение между наземной TRP 504 и летательной TRP 508 может быть невозможным из-за плохого состояния канала. Также, наземная TRP 504 и летательная TRP 508 могут работать независимо друг от друга.
На фиг. 7 представлена космическая система 600 связи, соответствующая варианту осуществления. Система 600 связи обеспечивает пример самотранспортирования, использующей спутники. Система 600 связи содержит многочисленные UE 602a-602b, многочисленные летательные TRP 606a-606c, 608 и многочисленные спутниковые TRP 610a-610b.
На фиг. 7 показаны многочисленные двуглавые стрелки, каждая из которых представляет беспроводное соединение. Конкретно, UE 602a имеет соединение с летательной TRP 606a; UE 602b имеет соединение с летательной TRP 606c; летательная TRP 608 имеет соединение со спутниковыми TRP 610a-610b и с летательными TRP 606a-606b; и летательная TRP 606b дополнительно имеет соединение с летательной TRP 606c.
Система 600 связи представляет пример самотранспортирования в системе связи. Самотранспортирование, которое может также упоминаться как беспроводное транспортирование, содержит использование ресурсов беспроводной сети, чтобы выполнить ретрансляцию, а использовать физические провода или кабели. В некоторых случаях сетевые ресурсы совместно используются между транспортированием и доступом UE. Это упоминается как интегрированный доступ и транспортирование (integrated access and backhaul, IAB). Самотранспортирование может быть реализовано, когда кабельное или оптоволоконное транспортирование невыполнимы, как в случае, например, космической TRP. В некоторых реализациях одна или более космических TRP могут сформировать релейное соединение, которое функционирует, по меньшей мере частично, как транспортное. Эти космические TRP, которые могут быть дронами, могут рассматриваться как летательные IAB. TRP, которая присутствует в составе IAB, в некоторых случаях может быть TRP с низкими возможностями базовой станции.
В некоторых реализациях самотранспортирование координируется центральным узлом, однако это не всегда может иметь место. Самотранспортирование вместо этого может выполняться распределенным способом, при котором не существует никакого центрального узла, который управляет каждой космической TRP в группе. Вместо этого космические TRP внутри группы осуществляют связь друг с другом, чтобы координировать свои действия.
Беспроводные транспортные соединения могут существовать между любыми двумя космическими TRP, в том числе, например, между спутниками, бортовыми платформами, аэростатами и дронами. Беспроводные транспортные соединения могут также существовать между наземной базовой станцией и космической TRP. TRP, содержащиеся в беспроводном транспортном соединении, могут принадлежать одному и тому же оператору или разным операторам. Когда TRP, содержащиеся в беспроводном транспортном соединении, принадлежат разным операторам, от одного оператора может потребоваться авторизация, чтобы достигнуть совместной работы трехмерной всесторонней иерархической системы беспроводной связи.
В системе 600 связи спутниковые TRP 610a-610b могут реализовывать самотранспортирование для летательной TRP 608. Например, соединения между спутниковыми TRP 610a-610b и летательной TRP 608 могут быть беспроводными транспортными соединениями, которые позволяют летательной TRP 608 получать доступ, например, к RAN, другим UE и/или к базовой сети. Спутниковые TRP 610a-610b могут формировать соединение с наземной TRP (не показано), чтобы разрешить доступ к RAN или базовой сети. В некоторых реализациях летательная TRP 608 может также иметь свое собственное беспроводное соединение с базовой сетью, чтобы быть частью RAN.
На фиг. 8 представлена интегрированная наземная и космическая система 700 связи, соответствующая дополнительному варианту осуществления. Система 700 связи обеспечивает пример самотранспортирования, используя наземные TRP. Система 700 связи содержит UE 702, наземную TRP 704, многочисленные летательные TRP 706a-706d, 708 и многочисленные спутниковые TRP 710a-710b.
На фиг. 8 показаны многочисленные двуглавые стрелки, каждая из которых представляет беспроводное соединение. Конкретно, UE 702 имеет соединение с летательной TRP 706d; летательная TRP 708 имеет соединение с наземной TRP 704 и с летательной 706a-706c; летательная TRP 706a дополнительно имеет соединение с летательной TRP 706b; летательная TRP 706b дополнительно имеет соединение с летательной TRP 706c; и летательная TRP 706c дополнительно имеет соединение с летательной TRP 706d. Хотя на фиг. 8 не показано, в некоторых реализациях соединения могут быть дополнительно сформированы с помощью спутниковых TRP 710a-710b.
В некоторых реализациях две или более из летательных TRP 706a-706d, 708 формируют группу TRP, которые не управляются и не координируются центральным узлом. Скорее группа TRP может связываться друг с другом через беспроводные транспортные соединения, чтобы координировать свои перемещения и конфигурацию соединений. Такая связь внутри группы TRP может в результате обладать более высокими характеристиками, но может также приводить к более высокими сетевыми затратами. Например, для беспроводных транспортных соединений необходимо выделять больше сетевых ресурсов.
В некоторых реализациях, наземная TRP 704 реализует самотранспортирование для летательной TRP 708. Например, соединение между наземной TRP 704 и летательной TRP 708 может быть беспроводным транспортным соединением, которое позволяет летательной TRP 708 получить доступ, например, к RAN, другим UE и/или к базовой сети.
В некоторых реализациях, система 700 связи реализует многочисленные релейные соединения, используя летательные TRP 706a-706d. Например, сообщение, посланное UE 702, может быть принято летательной TRP 706c через летательную TRP 706d. Это сообщение затем передается летательной TRP 708, а также другим летательным TRP 706a-706b через соединения между летательными TRP 706a-706c. Также, другие TRP 706a-706b также могут передавать сообщение летательной TRP 708 и потенциально увеличивать вероятность, что сообщение будет успешно принято на летательной TRP 708.
На фиг. 9 представлена интегрированная наземная и космическая система 800 связи, соответствующая еще одному варианту осуществления. Система 800 связи содержит множество UE 802a-802b, множество летательных TRP 806a-806d, 808 и спутниковую TRP 810.
Каждая из многочисленных двуглавых стрелок, показанных на фиг. 9, представляет беспроводное соединение. Конкретно, наземная TRP 804 имеет соединение с летательными TRP 806a-806c; летательная TRP 808 также имеет соединение с летательной TRP 806a-806d; летательная TRP 806a дополнительно имеет соединение с летательной TRP 806b; летательная TRP 806b дополнительно имеет соединение с летательной TRP 806c; и летательная TRP 806c дополнительно имеет соединение с летательной TRP 806d. Хотя на фиг. 9 не показано, в некоторых реализациях дополнительно могут быть сформированы соединения с UE 802a-802b и/или со спутниковой TRP 810. Например, наземная TRP 804 может сформировать соединение с одним или обоими из UE 802a-802b, чтобы обеспечить обслуживание беспроводной связью этих UE.
Система 800 связи обеспечивает пример многочисленных космических TRP, которые могут обеспечивать распределенную антенную систему. В некоторых случаях из-за стоимости может быть трудно реализовать много антенн в одной единственной летательной TRP. Распределенные антенны являются многочисленными антеннами, которые разнесены в пространстве, чтобы увеличить число возможных путей прохождения передачи от передатчика до приемника. Распределенные антенны могут быть реализованы, например, посредством летательных или спутниковых TRP со средними возможностями базовой станции. Распределенные антенны, формируемые множеством летательных TRP, могут быть более гибким и более эффективным способом обеспечивать выгоды MIMO за счет передачи скоординированными многочисленными TRP. Поскольку положение летательных TRP может регулироваться, конфигурация с объединенной антенной или с многочисленными TRP может меняться по мере необходимости. В некоторых реализациях распределенные антенны экономят электроэнергию, увеличивая шанс, что будет достигнута передача по линии прямой видимости между UE и космической TRP. В некоторых реализациях распределенная антенна, содержащая многочисленные космические TRP, может обеспечивать улучшенной обслуживание беспроводной связью по сравнению с одиночной TRP. Распределенные антенны могут также обеспечить улучшенное использование UE и возможности системы благодаря выигрышу от лучшего использования MIMO за счет совместной или взаимосвязанной передача антеннами, расположенными в разных местах.
В системе 800 связи летательные TRP 806a-806d являются группой TRP, которая образует летательную распределенную антенную систему, используя антенны каждой из летательных TRP 806a-806d. В некоторых реализациях летательная TRP 808 действует как центральный узел для летательных распределенных антенн (то есть, летательных TRP 806a-806d), чтобы обеспечивать услуги связи для UE 802a-802b. В других реализациях наземная TRP 804 действует в качестве центрального узла для летательных распределенных антенн 806a-806c, чтобы предоставлять услуги связи для UE 802a-802b. Различные летательные распределенные антенны могут передавать одни и те же или различные пакеты данных к одному и тому же UE, который управляется центральным узлом. Различные распределенные летательные антенны могут дополнительно иметь свой собственный беспроводной транспортный канал для координации. В случае распределенной антенной системы может быть предпочтительным, чтобы каждая распределенная летательная антенна была независимой, то есть, не скоординировалась с другими летательными распределенными антеннами.
В некоторых случаях, летательная TRP соединяется с наземной или космической базовой станцией через соединения входных устройств. В этих случаях обработка в основной полосе выполняется на базовой станции и только антенны летательной TRP используются в качестве распределенных антенн.
В некоторых реализациях, при необходимости, летательные TRP 806a-806d реализуются как летательные распределенные антенны. Например, в случае, когда требуется транспортное соединение высокой производительности между наземной TRP 804 и летательной TRP 808, летательные TRP 806a-806d могут быть развернуты с расположением, показанным на фиг. 9, чтобы обеспечить такое транспортное соединение высокой производительности. Летательные TRP 806a-806d могут также или вместо этого быть развернуты в случае, когда одно единственное релейное соединение между летательной TRP 808 и наземной TRP 804 обеспечивает нестабильное или несовместимое соединение.
В некоторых реализациях развертывание и совместные действия летательных TRP 806a-806d могут координироваться центральным узлом, который может быть, например, летательной TRP 808 или наземой TRP 804. Для каждой из многочисленных летательных TRP 806a-806d центральный узел может конфигурировать (например, через выделенную сигнализацию RRC или широковещательную передачу) пространство поиска DCI, количество попыток слепого декодирования, распределение частотно-временных ресурсов для поиска DCI, соответствующую информацию об антенных портах, индикатор TRP, используемый для передачи данных, запланированных DCI, индикатор TRP, используемый для передачи DCI и т.д. Летательные TRP 806a-806d могут принимать и передавать эти конфигурации для UE. В некоторых реализациях конфигурированные пространства поиска DCI могут использоваться совместно летательными TRP 806a-806d.
В некоторых реализациях многочисленные передачи к летательным TRP 806a-806d и от них являются некогерентными. Чтобы облегчить прием некогерентных передач, которые происходят одновременно, одна или обе наземная TRP 804 и летательная TRP 808 могут иметь многопанельные приемники. Многопанельные приемники используют многочисленные антенны для различения различных передач. В других реализациях многочисленные передачи к летательным TRP 806a-806d или от них являются когерентными.
В некоторых реализациях каждое из соединений между летательными TRP 806a-806d и наземной TRP 804, также как каждое из соединений между летательными TRP 806a-806d и летательным TRP 808, конфигурируются независимо. Конфигурация каждого соединения может быть основана на любом из многих различных факторов, включая, но не ограничиваясь только этим, относительное положение каждой UE и TRP в соединении и условия канала между UE и TRP. Например, соединение между наземной TRP 804 и летательной TRP 806a может быть основано на положении летательной TRP 806a относительно наземной TRP 804 и условиях канала между наземной TRP 804 и летательной TRP 806a. Соответственно, конфигурация соединения между наземной TRP 804 и летательной TRP 806a может быть независимой от других соединений, показанных на фиг. 9.
В некоторых реализациях два или более соединений между летательными TRP 806a-806d и наземной TRP 804 или два или более соединений между летательными TRP 806a-806d и летательной TRP 808 конфигурируются таким же образом. Это может потенциально понизить сложность и издержки, связанные с разрешением каждого из соединений.
В некоторых реализациях CSI получают для каждого из соединений между наземной TRP 804, летательными TRP 806a-806d и летательной TRP 808. Каждое соединение затем конфигурируется в соответствии с его соответствующей CSI.
В некоторых случаях свиппирование луча выполняется для каждого соединения, чтобы определить положения UE и TRP в соединении. Это может позволить формирование луча в соединении. Однако, учитывая количество соединений в летательной распределенной антенной системе, показанной на фиг. 9, выполнение свиппирования луча для каждого соединения может приводить к высокому уровню издержек. Кроме того, поскольку летательные TRP 806a-806d, 808 могут перемещаться, сбор CSI, основываясь на пилот-сигнале, может быть трудновыполнимым.
В некоторых вариантах осуществления космическая система связи может выполнять сбор информации по каналам радиотелеметрии, такой как сбор CSI, при небольшом или даже при отсутствии свиппирования луча. Этот сбор CSI может выполняться в трехмерном пространстве. Например, некоторые системы связи могут знать или определять положения UE и TRP с относительно высокой степенью точности.
В системах 5G и 6G принимаются некоторые передовые технологии MIMO, чтобы позволить высокие скорости передачи данных при связи. Чтобы облегчить передовые технологии MIMO, вводятся усложненные процедуры формирования луча и обратной связи по CSI. Системы связи 5G и 6G могут знать или определять положения UE и TRP с относительно высокой степенью точности. Если положения UE и TRP известны, то может быть определено, по меньшей мере, приблизительно, направление луча без свиппирования луча или с уменьшенным диапазоном свиппирования луча.
В некоторых вариантах осуществления положения UE и/или TRP могут использоваться для сбора информации в помощь позиционированию, такого как сбор CSI в помощь позиционированию, который может помочь сократить усилия по измерению каналов каналу. Формирование луча в помощь позиционированию и сбор информации CSI могут быть основаны на местоположении любой или всех UE и TRP в интегрированной системе. Информация, касающаяся местоположения любого или всех UE и местоположения любого или всех TRP может сформировать набор информации. Набор информации относится к местоположению UE и/или TRP в трехмерной всесторонней системе связи и набор информации также упоминается как трехмерная карта реального времени. Трехмерная карта реального времени может быть получена напрямую UE или TRP через сетевой сервер, Интернет или приложение мобильного телефона. В некоторых реализациях в интегрированной системе UE и/или TRP могут предварительно загружать трехмерную карту с сервера. Сетевой контроллер или центральный узел могут посылать информацию обновления трехмерной карты с периодическими или апериодическими (например, инициированные событием изменения) промежутками по мере необходимости. В некоторых реализациях трехмерную карту реального времени получают от TRP, действующей в качестве центрального узла, или от другого контроллера через канал управления или канал передачи данных. Например, трехмерная карта может быть принята TRP или UE по каналу управления или каналу данных и может периодически или динамично обновляться информацией, получаемой по каналу передачи данных или по каналу управления. В некоторых реализациях сбор информации в помощь позиционированию предполагает, что радиосреда в конкретной области относительно стабильна. Сбор CSI в помощь позиционированию может использоваться в любых или во всех раскрытых здесь системах связи. В некоторых примерах сеть может уведомлять UE по меньшей мере об одном из следующего: разрешать или запрещать функцию формирования луча в помощь позиционированию и/или сбора CSI в помощь позиционированию, должно ли UE загружать трехмерную карту или принимать информацию обновления трехмерной карты через канал передачи данных или канал управления. Как вариант, UE или TRP могут сообщить сети, обладают ли они возможностями использовать информацию позиционирования для трехмерной карты, чтобы помочь формированию луча и/или сбору CSI.
В представленном примере сигналы синхронизации при формировании луча могут передаваться в различных блоках сигнала синхронизации (synchronization signal block, SSB), где каждый SSB связывается с лучом. UE может использовать полученную позиционную информацию о TRP и непосредственно о ней, чтобы уменьшить количество лучей, участвующих в поиске при поиске ячейки. UE может также использовать полученную позиционную информацию, чтобы уменьшить количество лучей, которые должны измеряться при выборе наиболее подходящих лучей для измерений CSI (от одной или более TRP). TRP может использовать позиционную информацию для UE и себя самой, чтобы определить, какие лучи должны использоваться для передачи SSB, так чтобы можно было уменьшить количество лучей, необходимых для посылки сигналов синхронизации. TRP может использовать позиционную информацию для UE и себя самой, чтобы конфигурировать лучи для передачи опорных сигналов при зондировании канала, измерении CSI и демодуляции физических каналов управления и физических каналов передачи данных. Когда соединение включенной подсистемы направляет информацию UE, содержащую позиционную информацию, выключенной подсистеме, это может помочь выключенной подсистеме определить конфигурацию лучей SSB и луча опорного сигнала для быстрого включения.
В другом примере позиционная информация может помочь TRP конфигурировать схему передачи, схему обратной связи по CSI и/или периодичность обратной связи по CSI для UE. Имея трехмерную карту реального времени, TRP может знать не только позиционную информацию для UE и себя самой, но также знать информацию об окружающей среде. Например, информация об окружающей среде может содержать признаки того, существуют ли какие-либо препятствия между TRP и UE, и существуют ли соседние TRP, которые могут действовать совместно с TRP, чтобы обеспечивать связь для UE. Информация, касающаяся окружающей среды, может помочь TRP получить приблизительную оценку состояния канала и определить, является ли схема передачи MIMO или без MIMO передачи пригодной для связи с UE. Различные схемы обратной связи по CSI, соответствующие схемам передачи с MIMO и без MIMO, могут быть соответственно конфигурированы. Имея информацию относительно перемещения TRP и/или UE, соответствующая периодичность обратной связи по CSI также может быть конфигурирована.
В еще одном примере трехмерная карта реального времени может помочь UE переключаться между подсистемами или даже различными TRP одной и той же подсистемы. Например, UE, которое осуществляет связь с наземной TRP, может узнать, что движется близко от больших препятствий и что в результате состояние канала, как ожидается, станет хуже. В таком случае, UE может запросить соединение с летательной TRP, чтобы избежать нарушения связи.
В другом примере TRP, обслуживающая UE, может узнать, что UE движется близко от больших препятствий и что состояние канала, как ожидают, в результате станет хуже. В таком случае, TRP может договориться с другой TRP той же самой или другой подсистемы, чтобы запросить соединение между другой TRP и UE, чтобы избежать нарушения связи.
В дополнительном примере трехмерная карта реального времени может помочь определить соответствующие места расположения космических TRP, чтобы лучше обслуживать UE. Расположение космических TRP может учитывать нарушения связи UE, нарушения связи космических TRP и перемещения UE и космических TRP.
В еще одном примере, когда коммуникационная загрузка на центральном узле находится в пределах между низкой и средней, так чтобы он мог принять соединения с большим количеством UE, центральный узел может выключить некоторые другие TRP или подсистемы. Например, когда загрузки на летательную TRP 808 низкая, некоторые или все летательные TRP 806a-806d могут быть включены. Выключение TRP может содержать выключение всех функциональных возможностей TRP или выключение только части функциональных возможностей TRP. Примером выключения только части функциональных возможностей TRP является выключение каналов передачи данных и связанных с ними опорных сигналов. Возможны согласования между различными бортовыми TRP или между бортовыми TRP и наземными TRP, чтобы определить, разгрузить ли некоторые UE с одной бортовой TRP на другую бортовую TRP или на наземную TRP, и скорректировать расположение бортовых TRP или даже выключить некоторые бортовые TRP. Трехмерная карта реального времени может помочь при таких согласованиях, например, чтобы определить, какая бортовая TRP или наземная TRP должна быть выключена, перестроить расположение бортовых TRP и конфигурировать новые релейные соединения с UE.
Трехмерная карта реального времени может помочь скоординировать перемещение летательных TRP в соответствующие места и скоординировать конфигурации космических TRP, чтобы лучше обслуживать UE. Трехмерная карта реального времени может рассмотреть распределения UE, распределения летательных TRP и их перемещение. Помимо транспортных каналов, конфигурация космических TRP может также охватывать конфигурацию лучей SSB, конфигурации луча опорного сигнала, схемы передачи и конфигурации обратной связи по CSI. Эти конфигурации могут быть установлены, используя сигнальные механизмы, описанные здесь в другом месте.
На фиг. 10 показана космическая система 900 связи, соответствующая дополнительному варианту осуществления. Система 900 связи представляет пример летательных распределенных антенн, реализуемых для беспроводного доступа UE. Система 900 связи содержит UE 902, многочисленные летательные TRP 906a-906d и многочисленные спутниковые TRP 910a-910b.
На фиг. 10 показаны многочисленные двуглавые стрелки, каждая из которых представляет беспроводное соединение. Конкретно, UE 902 имеет соединение с летательными TRP 906a-906d; спутниковая TRP 910a имеет соединение с летательными TRP 906a-906d; спутниковая TRP 910b имеет соединение с летательными TRP 906a-906d; летательная TRP 906a дополнительно имеет соединение с летательной TRP 906b; летательная TRP 906b дополнительно имеет соединение с летательной TRP 906c; и летательная TRP 906c дополнительно имеет соединение с летательной TRP 906d.
В системе связи 900, одна или обе спутниковых TRP 910a-910b могут быть TRP с высокими возможностями базовой станции, которые предоставляют обслуживание UE 902. Летательные TRP 906a-906d являются группой TRP, которая формирует летательные распределенные антенны, используя антенны каждой из летательных TRP 906a-906d. Летательные распределенные антенны позволяют совместные передачи между UE 902 и спутниковыми TRP 910a-910b. Пакет данных, который передается через летательную распределенную антенну, передается каждой из летательных TRP 906a-906d. Например, пакет данных может передаваться UE 902 и приниматься каждой из летательных TRP 906a-906d. Летательные TRP могут затем передавать пакет данных спутниковым TRP 910a-910b. Подобные комментарии применяются к пакету данных, который передается от одного или от обоих спутников TRP 910a-910b к UE 902.
Летательные TRP 906a-906d могут быть реализованы и/или конфигурированы подобным образом в летательные TRP 906a-906d системы 900 связи.
Каждая из летательных TRP 906a-906d может рассматриваться как формирующая единое узловое релейное соединение между UE 902 и летательной TRP 908. Соединения, показанные между каждой из летательных TRP 906a-906d, являются необязательными при распределенном расположении антенн и летательные TRP 906a-906d мог все еще обеспечивать летательную распределенную антенну без прямых связей между ними.
В некоторых реализациях при необходимости в качестве летательной распределенной антенны реализуются летательные TRP 906a-906d. Например, в случае, когда требуется соединение высокой производительности между UE 902 и спутниковыми TRP 910a-910b, летательные TRP 906a-906d могут быть развернуты с расположением, показанным на фиг. 10, обеспечивая такое соединение высокой производительности. Летательные TRP 906a-906d могут или вместо этого быть развернуты в случае, когда соединения между спутниковыми TRP 910a-910b и UE 902 обеспечивают нестабильное или несовместимое соединение. В некоторых реализациях развертывание и совместные действия летательных TRP 906a-906d могут координироваться центральным узлом, которым может быть одна или обе спутниковые TRP 910a-910b.
В некоторых реализациях многочисленные передачи к летательным TRP 906a-906d или от них являются некогерентными. В некоторых реализациях каждое из соединений между летательными TRP 906a-906d и UE 902 и/или каждое из соединений между летательными TRP 906a-906d и спутниковыми TRP 910a-910b конфигурируются независимо. В некоторых реализациях два или более соединений между летательными TRP 906a-906d и UE 902 или два или более соединений между летательными TRP 906a-906d и спутниковыми TRP 910a-910b конфигурируются таким же образом. В некоторых реализациях CSI ищут для каждого из соединений между UE 902, летательными TRP 906a-906d и спутниковыми TRP 910a-910b. Сбор информации в помощь позиционированию может использоваться для определения этой CSI при уменьшенном сканировании луча и количестве измерений канала.
На фиг. 5-10 показаны различные реализации различных типов TRP. Как видно на этих примерах, спутниковые TRP, бортовые TRP и/или TRP на аэростате могут действовать в качестве космических базовых станций, чтобы напрямую предоставлять услуги радиосвязи для UE. Спутниковые TRP, бортовые TRP и/или аэростатные TRP могут вместо этого быть типом TRP, который косвенно предоставляет услугу беспроводной связи для UE, например, через квадрокоптерные TRP. Квадрокоптерные TRP могут дополнительно подразделяться в зависимости от их возможностей и соответственно действовать как летательное UE (без возможностей базовой станции), релейная станция (с низкими возможностями базовой станции), распределенная антенная система (с низкими или средними возможностями базовой станции) и летательная базовая станция (с высокими возможностями базовой станции). Когда квадрокоптерная TRP действует в качестве летательной базовой станции, она может обеспечивать низкие-высокие скорости передачи данных связи напрямую к UE. Когда квадрокоптерная TRP действует как релейная станция или распределенная антенная система, она может координироваться/управляться центральным узлом, таким как спутниковая TRP, бортовая платформа, аэростатная TRP, наземная TRP и квадрокоптерная TRP с высокими возможностями базовой станции. Теперь будут описаны различные способы реализации и работы представленных здесь систем связи.
Хотя системы 400, 500, 600, 700, 800, 900 связи показаны отдельно, это следует заметить, что любые признаки или функциональные особенности систем 400, 500, 600, 700, 800, 900 связи могут обеспечиваться одной единственной системой связи. В некоторых вариантах осуществления две или больше из систем 400, 500, 600, 700, 800, 900 связи могут фактически быть частью одной единственной системы связи. Кроме того, любые из систем 400, 500, 600, 700, 800, 900 связи могут быть примерными реализациями наземной системы 102 связи и космической системы 104 связи, показанных на фиг. 2.
Некоторые варианты осуществления относятся к способам соединения UE с интегрированной наземной и космической системой связи. Когда UE включается первой и/или входит в интегрированную наземную и космическую систему связи, оно выполняет поиск первичной ячейки или начальный поиск соединения/подсистемы (то есть, чтобы обнаружить сигнал синхронизации и получить системную информацию) для всех возможных подсистем в интегрированной наземной и космической системе связи. Эти подсистемы содержат одну или более соответствующих TRP. Затем может быть выполнена начальная процедура доступа, чтобы включить соединение между UE и подсистемой.
Подключение одного или более соединений к подсистеме также называется включением подсистемы, где каждое соединение предназначено для одной или более TRP в подсистеме. Например, подключение к подсистеме содержит подключение соединений к одной или более TRP в подсистеме. Когда соединение предназначено для одной или более TRP, подключение соединения к подсистеме содержит включение некоторых или всех TRP для того соединения. Точно также, отключение одного или более соединений от подсистемы также называют отключением системы, где каждое соединение предназначено для одной или более TRP в подсистеме. Когда соединение предназначено более чем для одной TRP, выключение соединения с подсистемой содержит выключение некоторых или всех TRP для этого соединения. Операция включения или выключения может выполняться сетью или UE. Сеть всегда может включать/выключать некоторые TRP, чтобы включить/выключить соответствующие соединения. С точки зрения UE, включение всех TRP подсистемы означает, что UE может не требоваться выполнять синхронизацию и начальный доступ к каждой TRP этой подсистемы или необходимо выполнять только определенные функции. Однако, если некоторые из TRP в подсистеме включаются/выключаются, UE, возможно, не должно это знать, если нет сигнализации о том, чтобы сообщить UE удалить эти TRP из списка, когда в помощь связи между TRP и UE используется карта.
На фиг. 11 представлена блок-схема последовательности осуществления операций способа 1100, выполняемого UE в интегрированной наземной и космической системе связи в соответствии с вариантом осуществления. Способ 1100 может выполняться, когда UE сначала включается и/или входит в интегрированную наземную и космическую систему связи. Аналогичный способ может также выполняться UE в одной только космической системе связи.
Этап 1102 содержит поиск UE различных подсистем интегрированной наземной и космической системы связи.
В данном примере UE может искать различные подсистемы, основываясь на правиле приоритета. Это может рассматриваться как начальный поиск ячейки, выполняемый по определенным правилам приоритета. Эти правила приоритета определяют порядок, в котором UE будет искать различные подсистемы. Одним из примеров такого правила приоритета является следующее: наземная подсистема имеет наивысший приоритет, бортовая подсистема и низковысотная летательная подсистема имеют второй наивысший приоритет, и спутниковая подсистема имеет самый низкий приоритет. Согласно этому правилу приоритета UE будет сначала искать сигналы синхронизации для наземной подсистемы, затем искать сигналы синхронизации для бортовой подсистемы и/или низковысотной летательной подсистемы и, в последнюю очередь, искать сигналы синхронизации для спутниковой подсистемы. После начального поиска ячейки, когда UE успешно обнаружило и соединилось с подсистемой с определенным приоритетом, UE может прекратить поиск других подсистем, имеющих более низкие приоритеты. Альтернативно, подсистема с относительно высоким приоритетом может передать информацию, чтобы указать, имеются ли другие подсистемы с более низкими приоритетами и указать частоту обнаружения сигналов синхронизации и/или получения системной информации о других подсистемах. После того, как UE успешно обнаружило и соединилось с приоритетной подсистемой, UE затем обнаруживает подсистемы с более низким приоритетом, используя указанные частоты. Это может помочь ускорить процедуру UE для обнаружения остальных подсистем и понизить потребление электроэнергии на UE, так как искаться должны только указанные частоты. Альтернативно, UE всегда может искать все подсистемы в соответствии с правилом приоритета и соединяться со всеми подсистемами, которые были успешно обнаружены. В другом примере правило приоритета может состоять в поиске поиском сигналов синхронизации для подсистем от низкой частоты к высокой частоте или от высокой частоты к низкой частоте. Различные правила приоритета могут объединяться. Например, если полоса частот поддерживает многочисленные подсистемы, UE может искать сигнал синхронизации для подсистемы с наивысшим приоритетом от низкой частоты к высокой частоте и затем искать сигнал синхронизации для подсистемы со вторым наивысшим приоритетом и так далее. В еще одном примере UE может искать сигналы синхронизации даже без правила приоритета.
В другом примере UE может искать различные подсистемы без правила приоритета. Например, UE может выбрать подсистему случайно или выбрать подсистему UE, найденную первой, в качестве подсистемы для доступа.
После начального поиска ячейки на этапе 1102 способ переходит к этапу 1104. На этапе1104 UE выполняет измерения состояния канала для всех обнаруженных подсистем. Эти измерения состояния канала могут позволить UE определять, включать ли некоторые из обнаруженных подсистем. Например, если состояние канала для подсистемы плохие, соединение с этой подсистемой не может быть включено. Результатом измерения состояния канала может быть принимаемая мощность сигнала синхронизации, результат измерения информация о состоянии канала (channel state information, CSI), результат измерения принимаемой мощности опорного сигнала (reference signal receive power, RSRP), индикатор мощности принимаемого сигнала (received signal strength indicator, RSSI) и т.п.
Необязательный этап 1106 содержит прием UE информации конфигурации для выполнения измерений состояния канала для подсистемы, которая выключена или не была обнаружена. Например, обнаруженная подсистема может конфигурировать UE, чтобы выполнить измерения состояния канала на другой подсистеме, которая выключена или не была обнаружена, чтобы определить, должна ли эта другая подсистема включаться.
После этапа 1104 или этап 1106 способ 1100 может перейти к этапу 1108, на котором UE определяет включать или выключать подсистему. UE может выбрать включение соединений с любыми подсистемами, которые имеют, например, наибольшие принимаемые мощности сигнала синхронизации, наибольшую RSRP, наибольшую RSSI или наилучшую CSI. UE может затем выбрать отключение соединений с остающимися подсистемами. UE может использовать порог результата измерения, чтобы включить или выключить соединение с подсистемой. Порог результата измерения может быть задан для подсистемы или сообщаться подсистемой или любой другой включенной подсистемой. Когда требование по порогу результата измерения удовлетворяется, соединение с соответствующей подсистемой включается. Когда требование по порогу результата измерения не удовлетворяется, соединение с соответствующей подсистемой выключается. При определении, включать или выключать соединение с подсистемой, правило приоритета может быть объединено с порогом. Например, UE может решить включить соединение с подсистемой с более высоким приоритетом и это удовлетворяет требованию к порогу и в то же время выключить его соединение с подсистемой с более низким приоритетом, даже если требование по порогу удовлетворяется. Это может быть выгодно с точки зрения экономии электропитания на UE, особенно, когда подсистема с более низким приоритетом является спутниковой подсистемой, поскольку длина соединения является чрезвычайно большой и спутниковая подсистема может обеспечивать связь только с низкой скоростью передачи данных с низкой эффективностью.
В другом примере смещение для принимаемой мощности сигнала синхронизации или измеренные CSI, RSRP, RSSI и т.п., между различными подсистемами может использоваться для определения, включать или выключать соединение с подсистемой. Смещение может сообщаться UE или смещение может задаваться. Когда принимаемая мощность сигнала синхронизации (или измеренные CSI, RSRP, RSSI и т.п.) подсистемы с более высоким приоритетом больше, чем для подсистемы с более низким приоритетом и разность превышает смещение, UE может принять решение включить подсистему с более высоким приоритетом и выключить подсистему с более низким приоритетом. Когда принимаемая мощность сигнала синхронизации (или измеренные CSI, RSRP, RSSI и т.п.) подсистемы с более высоким приоритетом больше, чем для с более низким приоритетом, но разность находится в пределах смещения, UE может принять решение включить систему с более низким приоритетом и выключить подсистему с более высоким приоритетом. Это может предотвратить использование подсистемы с более низким приоритетом (особенно спутниковой подсистемы), имеющей очень низкую вероятность включения. Например, это может предотвратить формирование большого количества соединений с подсистемой с высоким приоритетом, в то время как формируется очень немного соединений с подсистемой с низким приоритетом.
В еще одном примере порог может быть объединен со смещением, чтобы определять, включать или выключать соединение с подсистемой. Когда требования по порогу удовлетворяются как для подсистемы с более высоким приоритетом, так и для подсистемы с более низким приоритетом и разность принимаемой мощности сигнала синхронизации (или измеренных CSI, RSRP, RSSI и т.п.) находится в пределах смещения, подсистема с более низким приоритетом может включаться, а подсистема с более высоким приоритетом может выключаться. Когда требования по порогу удовлетворяются как для подсистемы с более высоким приоритетом, так и для подсистемы с более низким приоритетом и принимаемая мощность синхронизации (или измеренных CSI, RSRP, RSSI и т.п.) подсистемы с более высоким приоритетом больше, чем принимаемая мощность сигнала синхронизации подсистемы с более низким приоритетом, более, чем на величину смещения, подсистема с более высоким приоритетом может включаться, а подсистема с более низким приоритетом может выключаться.
Когда требования по порогу удовлетворяются как для подсистемы с более высоким приоритетом, так и для подсистемы с более низким приоритетом, но разность между принимаемой мощностью сигнала синхронизации (или измеренными CSI, RSRP, RSSI и т.п.) и порогом для подсистемы с более высоким приоритетом не превышает смещение, подсистема с более низким приоритетом может включаться, а подсистема с более высоким приоритетом может выключаться. Когда требования к порогу удовлетворяются как для подсистемы с более высоким приоритетом, так и для подсистемы с более низким приоритетом, и разности между принимаемой мощностью сигнала синхронизации (или измеренными CSI, RSRP, RSSI и т.п.) и порогом для подсистемы с более высоким приоритетом больше, чем смещение, подсистема с более низким приоритетом может выключаться, а подсистема с более высоким приоритетом может включаться.
Когда требования по порогу удовлетворяются как для системы с более высоким приоритетом, так и для подсистемы с более низким приоритетом, но разность между принимаемой мощностью сигнала синхронизации (или измеренными CSI, RSRP, RSSI и т.п.) и порогом для подсистемы с более низким приоритетом не превышает смещение, подсистема с более низким приоритетом может быть выключаться, а подсистема с более высоким приоритетом может включаться. Когда требования по порогу удовлетворяются как для подсистемы с более высоким приоритетом, так и для подсистемы с более низким приоритетом, и разность между принимаемой мощностью сигнала синхронизации (или измеренными CSI, RSRP, RSSI и т.п.) и порогом для подсистемы с более низким приоритетом превышает смещение, подсистема с более низким приоритетом может быть включена, и подсистема с более высоким приоритетом может быть выключена.
На этапе 1108 в интегрированной системе решение о включении или выключении соединения с подсистемой сообщается базовой станции. Базовая станция может быть любой наземной или космической TRP с высокими возможностями базовой станции. В некоторых случаях базовая станция является центральным узлом, которая работает с группой или без группы распределенных TRP. В том случае, когда базовая станция работает с распределенными TRP, UE мог сообщить об этом базовой станции через релейное соединение, обеспечиваемое распределенными TRP. Распределенные TRP могут принадлежать к той же самой подсистеме, что и базовая станция, или к другой подсистеме.
В некоторых реализациях UE ищет различные подсистемы интегрированной наземной и космической системы связи. После начального поиска ячейки UE может выполнить процедуру начального доступа по восходящему каналу (то есть, послать преамбулу произвольного доступа) для обнаруженной подсистемы, чтобы сообщить сети, что UE установило соединение с такой подсистемой. Когда UE обнаруживает многочисленные подсистемы во время этапа первичного поиска ячейки, UE может выполнить восходящую начальную процедуру доступа на каждой обнаруженной подсистеме. Альтернативно, UE может выполнить процедуру начального доступа по восходящему каналу со стороны обнаруженной подсистемы и затем уведомить остальную сеть об обнаруженную подсистеме. В другом примере, после начального поиска ячейки UE выполняет измерения состояния канала для всех обнаруженных подсистем. Эти измерения состояния канала могут позволить UE определить, включать или не включать некоторых из обнаруженных подсистем. Затем UE может выполнить процедуру начального доступа на восходящем канале на подсистеме, у которой результаты измерений состояния канала удовлетворяет вышеупомянутым требованиям к состоянию канала, таким как порог и смещение. Когда требованиям к состоянию канала удовлетворяют многочисленные подсистемы, UE может выполнить процедуру начального доступа по восходящему каналу для каждой из многочисленных подсистем или UE может выполнить процедуру начального доступа по восходящему каналу со стороны многочисленных подсистем и затем уведомить сеть об остальных многочисленных подсистемах.
В некоторых реализациях, решение о включении или выключении подсистемы принимается совместно UE и интегрированной наземной и космической системой связи. Например, вслед за этапом 1108 UE может выполнить необязательный этап 1110. Этап 1110 содержит прием UE от базовой станции индикации включения или выключения соединения подсистемы. UE затем включает или выключает соединение с подсистемой, соответственно. Например, после того, как UE измеряет принимаемую мощность сигнала синхронизации, CSI, RSRP, RSSI и т.п. для каждой обнаруженной подсистемы, UE сообщает базовой станции интегрированной системы список возможных подсистем (возможно, вместе с принимаемой мощностью сигнала синхронизации, CSI, RSRP, RSSI и т.п.). Это может произойти, например, на этапе 1108. Интегрированная система затем принимает решение о том, какая из возможных подсистем включается или выключается, и уведомляет UE. Это уведомление, которое принимается на этапе 1110, может быть делаться посредством сигнализации RRC, сигнализации MAC или DCI физического уровня посредством широковещательной сигнализации, многоадресной сигнализации, групповой сигнализации, выделенной сигнализация или любого их сочетания. Таким образом, на этапе 1108 UE может принять предварительное решение от том, какие подсистемы должны включаться или выключаться, и на этапе 1110 интегрированная система может переменить это решение.
В некоторых реализациях этапа 1110, когда интегрированная система принимает решение, какая из возможных подсистем, рекомендуемых UE, будет включаться или выключаться, интегрированная система может принять решение включить подсистему, которая не является одной из возможных подсистем, рекомендуемых UE, и уведомить об этом UE. Интегрированная система может даже решить, что ни одна из возможных подсистем кандидата, рекомендуемых UE, не должна включаться, и решить включить подсистему, которая не находится в числе возможных подсистем. В этой ситуации UE будет следовать уведомлениям, даваемым интегрированной системой.
Альтернативно, решение о включении или выключении подсистемы принимается полностью интегрированной наземной и космической системой связи. Например, следуя этапу 1104 или этапу 1106, способ может перейти к этапу 1112 вместо этапа 1108. Этап 1112 содержит сообщение от UE результатов измерений состояния канала базовой станции интегрированной системы, прием индикации включения или выключения соединения подсистемы от базовой станции, и включение или выключение подсистемы, соответственно. На этапе 1112 UE может сообщить базовой станции интегрированной системы результаты измерений состояния канала (например, принимаемая мощность сигнала синхронизации, CSI, RSSP, RSSI и т.п.) обнаруженных подсистем, включенных подсистем или подсистем, которые либо выключены, либо не были обнаружены или превращаются - прочь или не были обнаружены и указаны в информации о конфигурации для выполнения измерений состояния канала, принятой на этапе 1106. Интегрированная система может затем определить, включать или выключать каждую из обмеренных подсистем. Базовая станция интегрированной системы может сообщить результат UE и UE, соответственно, включает или выключает подсистемы. Этап 1112 отличается от этапов 1108, 1110, на которых UE не принимает каких-либо собственных решений в отношении того, какие подсистемы включать или выключать. Вместо этого, на этапе 1112 эти решения выполняются полностью интегрированной системой.
На этапе 1110 или на этапе 1112, когда интегрированная система определяет, включать или выключать подсистему, это определение выполняются базовой станцией или сетевым контроллером интегрированной системы. UE мог сообщить результаты измерений состояния канала для различных подсистем или список возможных подсистем напрямую базовой станции для выполнения определения. Альтернативно, UE может сообщить результаты измерений состояния канала для подсистемы базовой станции, которая относится к обмеренной подсистеме, и базовая станция обмеренной подсистемы затем может передать эти результаты измерений состояния канала другой базовой станции или сетевому контроллеру для выполнения определения. Когда базовая станция является центральным узлом и работает с группой распределенных TRP, результаты измерений состояния канала могут сначала сообщаться одной или более из распределенных TRP и затем передаваться базовой станции. Аналогично, при уведомлении UE, какая подсистема должна быть включена или выключена, уведомление может сначала быть доставлено на базовую станцию или может быть доставлено через базовую станцию обмеренной подсистемы. Когда базовая станция является центральным узлом и работает с группой распределенных TRP, уведомление могло быть доставлено UE через одну или более из числа распределенных TRP.
На фиг. 12 представлена блок-схема последовательности выполнения операций способа 1200, выполняемого базовой станцией в интегрированной наземной и космической системе связи в соответствии с вариантом осуществления. Базовая станция может быть любой наземной или космической TRP с высокими возможностями базовой станции. В некоторых случаях, базовая станция является центральным узлом, который работает с группой или без группы распределенных TRP. Способ 1200 обычно соответствует способу 1100, но с точки зрения базовой станции, а не с точки зрения UE.
На этапе 1202 базовая станция посылает сигнал синхронизации, соответствующий типу подсистемы, к которой принадлежит базовая станция. Например, если базовая станция находится в наземной подсистеме, то сигнал синхронизации мог соответствовать этой подсистеме. Если базовая станция находится в низковысотной летательной подсистеме, то сигнал синхронизации может соответствовать этой подсистеме. Сигнал синхронизации может позволить UE обнаруживать подсистему (например, выполнять этап 1102 способа 1100) и/или выполнять измерения состояния канала для подсистемы (например, выполнять этап 1104 способа 1100).
Как вариант, этап 1204 может содержать базовую станцию, конфигурирующую UE для выполнения измерений состояния канала на подсистеме, которая выключена или не обнаружена. Например, этап 1204 может конфигурировать UE, чтобы выполнить этап 1106 способа 1100.
Следуя этапу 1202 или этапу 1204, способ может перейти к этапу 1206, где базовая станция принимает от UE индикацию включения или выключения. Например, эта индикация может быть послана от UE на этапе 1108 способа 1100.
Как вариант, на этапе 1208 базовая станция проводит дополнительное определение относительно в отношении включения или выключения на UE. Базовая станция может затем уведомить UE в отношении результата определения. Например, если базовая станция решает, что операция включения или выключения подсистемы, выполняемая UE, была субоптимальной с точки зрения сети, то тогда базовая станция мог уведомить UE об этом решении. UE может принять уведомление, например, на этапе 1110 способа 1100.
Следуя этапу 1202 или этапу 1204, способ 1200 может перейти к этапу 1210 вместо этапа 1206. На этапе 1210 базовая станция принимает от UE отчет о результатах измерений состояния канала, определяет, включать или выключать подсистему и уведомляет UE о результате определения. Отчет о результатах измерений состояния канала может содержать в себя принимаемую мощность сигнала синхронизации, CSI, RSSP, RSSI и т.п. для одной или более подсистем. Базовая станция может использовать правила приоритета, пороговые требования и/или смещения, чтобы определить, какая подсистема должна включаться или выключаться, как описано выше. Качество соединения и доступность ресурса соединения также могут быть учтены. Этап 1210 обычно соответствует этапу 1112 способа 1100. Когда измерение является измерением преамбулы RACH, измерение опорного сигнала на восходящем канале и т.п., которое проводится TRP, после этапа 1202 базовая станция может собрать результаты измерений соответствующих TRP, принять решение в отношении включения или выключения подсистемы в UE и уведомить UE о принятом решении. В этом случае, базовая станция может не обязательно принимать отчет о результатах измерений состояния канала или индикацию о включении или выключении индикации от UE. В другом примере базовая станция может принять решение, основываясь одновременно на вышеупомянутых результатах измерений, полученных TRP, и на результатах измерений состояния канала и/или на индикации включения или выключения подсистемы, сообщаемой UE.
Согласно способам 1100, 1200, включение соединения с подсистемой охватывает: разрешение всех функций на соединении или разрешение только части функций на соединении. Выключение соединения с подсистемой охватывает: выключение всех функций на соединении или выключение только части функций на соединении. Включение или выключение только части функций на соединении полезно для подсистемы с более низким приоритетом, особенно, когда, например, присутствует наземная подсистема. Это может помочь экономить электроэнергию на UE, поскольку включены только некоторые из функций в соединении. Например, соединения одновременно с наземной подсистемой и со спутниковой подсистемой включены и принимается решение выключить спутниковую подсистему, выключение спутниковой подсистемы может содержать выключение только некоторых из функциональных возможностей спутниковой подсистемы. Например, на спутниковой подсистеме могут выключаться только процессы RACH, и другие функции, такие как передача данных, все еще доступны на спутниковой подсистеме. В другом примере, когда соединение со спутниковой подсистемой включено, такие функции, как передача данных и опорные сигналы, доступны на спутниковой подсистеме, а остальные функции, такие как сигналы синхронизации и RACH, остаются недоступными в спутниковой подсистеме.
Включение или выключение подсистемы или соединения могут выполняться на разных уровнях. В одном примере выключение подсистемы или соединения может содержать выключение только передачи данных. В другом примере выключение подсистемы или соединения может содержать выключение передачи данных и измерение и сообщение информации о состоянии канала. В еще одном примере выключение подсистемы или соединения может содержать выключение передачи данных, измерение и сообщение информации о состоянии канала, а также выключение управления радио ресурсом и RACH. В еще одном примере выключение подсистемы или соединения может содержать выключение сигналов синхронизации нисходящего канала и, следовательно, отключение всех функций подсистемы. Точно также, включение подсистемы или соединения может содержать включение любого или всего из следующего: сигналы синхронизации нисходящего канала, сигналы синхронизации нисходящего канала, измерение информации о состоянии канала, соседние измерения для соседних ячеек, управление радиоресурсом, RACH и передача данных. В этой ситуации, когда UE сообщают о включении или выключении подсистемы или соединения, информации, в отношении того, какой уровень или какие функции должны быть включены или выключены, также может быть предоставлена.
Согласно способам 1100, 1200, некоторые подсистемы, если присутствуют, могут никогда не выключаться. Например, когда существует наземная подсистема, наземная подсистема может не выключаться. Подсистема, которая не выключается, может упоминаться как первичная подсистема. UE может использовать первичную подсистему для поддержки операции мультисоединения. Например, UE может поддерживать соединение RRC только с первичной подсистемой и принимать от первичной подсистемы сигнализацию для включения или выключения других подсистем. UE может также принимать от первичной подсистемы конфигурации для других подсистем. Интегрированная наземная и космическая система связи может опираться на эту первичную подсистему, чтобы определять, включать или выключать другие подсистемы.
В некоторых вариантах для предоставления UE необходимых параметров конфигурации, чтобы сформировать соединение, TRP в подсистеме могут использоваться механизмы сигнализации. Например, какая-то сигнализация может потребоваться, чтобы уведомить UE о включении или выключении соединения с подсистемой, а какая-то сигнализация может потребоваться UE, чтобы сообщить интегрированной системе список возможных подсистем для включения. Вообще говоря, сигнализация может передаваться различными способами, в том числе: широковещательно, как часть системной информации, выделенная сигнализация RRC, сигнализация MAC, выделенная или общая сигнализации управления нисходящего канала физического уровня, или сочетание по меньшей мере двух различных форм сигнализации. Например, UE может сообщить список возможных подсистем для включения интегрированной системе посредством выделенной сигнализации RRC. Интегрированная система может затем выбрать, какие подсистемы должны включаться, а какие - выключаться, и уведомить UE об этих выбранных подсистемах посредством выделенной сигнализации RRC, сигнализации MAC, сигнализации управления по нисходящему каналу физического уровня или некоторого их сочетания. Кроме того, UE может сообщать информацию TRP посредством сигнализации управления восходящего канала физического уровня и/или вместе с восходящими данными по восходящему каналу передачи данных физического уровня.
Сигнализация может передаваться явным или неявным способом. Например, когда интегрированная система хочет сообщить UE, чтобы включить соединения с конкретным типом подсистемы, UE может сообщаться явная сигнализация, которая указывает тип подсистемы. Если различные типы подсистем связываются с различными структурами для сигналов синхронизации, каналов RACH, конфигураций радиоинтерфейсов, опорных сигналов и/или каналов передачи данных, то эти связанные структуры могут сообщаться неявно, когда тип подсистемы сообщается явно. В другом примере, когда UE успешно обнаруживает сигнал синхронизации во время этапа первичного поиска ячейки, UE может распознать тип подсистемы, используя сигналы синхронизации, и затем связанные структуры сигналов синхронизации, каналов RACH, конфигураций радиоинтерфейсов, опорных сигналов или каналов передачи данных для типа подсистемы сообщаются также неявно. С помощью этого способа можно значительно понизить издержки на передачу сигнализации.
На фиг. 13 представлена блок-схема последовательности выполнения операций способа 1300, исполняемого UE в соответствии с вариантом осуществления. UE мог быть наземным или космическим UE.
На этапе 1302 UE передает или принимает первую беспроводную передачу к первой TRP или от нее в беспроводной сети. Первая TRP является первым типом TRP, который мог быть любым раскрытым здесь типом TRP. Первая TRP может быть наземной или космической TRP.
Этап 1304 содержит UE передача или прием второй беспроводной передачи ко второй TRP или от нее в беспроводной сети. Вторая TRP является вторым типом TRP и является космической TRP. Второй тип TPR отличается от первого типа TRP. В некоторых реализациях первый и второй типы TRP принадлежат разным подсистемам в системе связи.
Примечательно, что первая и вторая передача посылаются в одной и той же беспроводной сети, предоставляемой одной и той же системой связи, которая может быть любой раскрытой здесь системой связи. Один и тот же модуль или терминал на UE может принимать обе передачи.
В некоторых реализациях первый тип TPR и второй тип TPR реализуются на различных уровнях беспроводной сети. Каждый из различных уровней беспроводной сети может содержать соответствующий диапазон высот. Примеры различных уровней беспроводной сети представлены на фиг. 5 и 6.
В некоторых реализациях этап 1302 содержит прием первой беспроводной передачи от первой TRP, а этап 1304 содержит прием второй беспроводной передачи от второй TRP. В этих реализациях первая беспроводная передача и вторая беспроводная передача содержат один и тот же пакет данных или разные пакеты данных. Это пример многочисленных TRP, возможно, в форме распределенной антенны, передающих один и тот же пакет данных к UE или различные пакеты данных, предназначенные одному и тому же UE, чтобы улучшить обслуживание на UE.
В некоторых реализациях этап 1304 содержит прием второй беспроводной передачи. UE может затем определить второй тип TPR, основываясь на второй беспроводной передаче. Например, вторая передача может содержать явную или неявную сигнализацию, которая указывает второй тип TPR или подсистему для второго типа TRP. Примеры такой сигнализации можно найти здесь в другом месте.
В некоторых вариантах осуществления ED 110, показанное на фиг. 3A, может выполнять способ 1300, в котором приемопередатчик 202 выполняет, по меньшей мере частично, этапы 1302, 1304.
На фиг. 14 представлена блок-схема последовательности выполнения операций способа 1400, выполняемого первой TRP в соответствии с вариантом осуществления. Первая TRP является первым типом TRP и является космической TRP.
Этап 1402 содержит первую TRP, передающую или принимающую первую беспроводную передачу к UE или от него в беспроводной сети. UE может быть наземным или космическим UE.
На этапе 1404 представлена первая TRP, передающая или принимающая вторую беспроводную передачу ко второй TRP или от нее в беспроводной сети. Вторая TRP является вторым типом TRP, отличающейся от первого типа TRP. Вторая TRP может быть наземной или космической TRP. Первый и второй типы TRP могут принадлежать к различным уровням и/или подсистемам в системе связи. В некоторых реализациях вторая беспроводная передача является беспроводной транспортной передачей.
Примечательно, что первая и вторая передачи посылаются в одной и той же беспроводной сети, обеспечиваемой в одной и той же системе связи, которая может быть любой раскрытой здесь системой связи. Один и тот же модуль или терминал на первой TRP может принимать обе передачи.
В некоторых реализациях этап 1402 содержит прием первой беспроводной передачи от UE, а этап 1404 содержит передачу второй беспроводной передачи ко второй TRP. В этих реализациях первая беспроводная передача и вторая беспроводная передача содержат один и тот же пакет данных или разные пакеты данных. Это пример пакетной передачи, где первая TRP действует в качестве релейного узла между UE и второй TRP.
В некоторых вариантах осуществления космическая TRP 172, показанная на фиг. 3C, может выполнять способ 1400, в котором передатчик 272 и/или приемник 274 выполняют, по меньшей мере частично, этапы 1402, 1404.
На фиг. 15 представлена блок-схема последовательности выполнения операций способа 1500, исполняемого центральным узлом в соответствии с вариантом осуществления. Центральный узел в некоторых реализациях может быть наземной или космической TRP с высокими возможностями базовой станции.
Этап 1502 содержит определение конфигурации для множества TRP в системе связи. Множество TRP содержит по меньшей мере одну наземную TRP и по меньшей мере одну космическую TRP. Эта конфигурация может относиться к управлению и/или координации любого подхода или любых функциональных возможностей множества TRP.
Этап 1504 содержит передачу сигнализации по меньшей мере одной TRP из множества TRP, причем сигнализация содержит команды для реализации конфигурации множества TRP. Эта сигнализация может содержать явную сигнализацию и/или неявную сигнализацию.
В некоторых реализациях конфигурация для множества TRP содержит множество соединений для UE, где каждое из множества соединений должно быть другим типом TRP. Например, этап 1502 может соответствовать этапу 1210 способа 1200.
В некоторых реализациях конфигурация множества TRP содержит релейное соединение. Здесь, космическая TRP является релейным узлом в релейном соединении.
В некоторых реализациях конфигурация множества TRP содержит структуру летательной распределенной антенны. Структура летательной распределенной антенны может содержать множество летательных TRP, каждая из которых имеет соединение с TRP. Например, она может быть подобна летательной распределенной антенне, показанной на фиг. 9. Альтернативно, структура летательной распределенной антенны может содержать множество летательных TRP, каждая из которых имеет соединение с UE. Например, она может быть подобна летательной распределенной антенне, показанной на фиг. 10.
В некоторых реализациях конфигурация множества TRP содержит беспроводное транспортное соединение для множества TRP. На фиг. 7 и 8 показаны примеры такого беспроводного транспортного соединения.
В некоторых реализациях конфигурация множества TRP содержит передачу управления соединением по меньшей мере для одной TRP. Эта передача управления соединением может также содержать передача управления подсистеме или системе связи. Передача управления может также основываться на любом из множества различных факторов, примеры которых обсуждаются здесь в другом месте.
В некоторых реализациях космическая TRP является летательной TRP и команды содержат команду для летательной TRP переместиться в новое местоположение. Например, летательная TRP может быть расположена в новом месте, чтобы улучшить беспроводное обслуживание в этом расположении в случае мероприятия на открытом воздухе или стихийного бедствия.
В некоторых реализациях команды содержат команду, по меньшей мере для одной TRP, включить или выключить соединение. Например, эта команда может быть передана на этапе 1210 способа 1200.
В некоторых вариантах осуществления наземная TRP 170, показанная на фиг. 3B, или космическая TRP 172, показанная на фиг. 3C, может выполнять способ 1400. Например, процессоры 250, 270 могли выполнить этап 1502 и передатчики 252, 272 могут выполнить этап 1504.
Подход настоящего раскрытия касается средств выполнения любого из раскрытых здесь способов. Эти средства могут быть, например, в форме устройства, блока или модуля. В одном из вариантов осуществления устройство содержит средства для выполнения каждого из этапов 1102, 1104, 1106, 1108, 1110, 1112 способа 1100. В другом варианте осуществления устройство содержит средства для выполнения каждого из этапов 1202, 1204, 1206, 1208, 1210 способа 1200. В дополнительном варианте осуществления устройство содержит средства выполнения каждого из этапов 1302, 1304 способа 1300. В еще одном варианте осуществления устройство содержит средства выполнения каждого из этапов 1402, 1404 способа 1400. В дополнительном варианте осуществления устройство содержит средства выполнения каждого из этапов 1502, 1504 способа 1500.
Некоторые подходы настоящего раскрытия касаются искусственного интеллекта (artificial intelligence, AI) и машинного обучения (machine learning, ML). AI и, как вариант, ML могут помочь в конфигурации системы связи. Например, AI/ML может использоваться для оптимизации расположения сети в системе связи. Эта система связи могла быть космической системой связи или интегрированной наземной и космической системой связи. Например, любые из систем 400, 500, 600, 700, 800 или 900 связи могут быть конфигурированы и/или реализованы, по меньшей мере, частично, через AI/ML.
AI/ML использовались для того, чтобы решить много трудных и сложных проблем. Чтобы помочь в понимании некоторых вариантов осуществления, здесь приводится некоторое второстепенное обсуждение ML и AI. AI является возникшей и быстрорастущей областью, благодаря прогрессу, достигнутому в области архитектуры компьютеров и, в частности, в области графических процессоров общего назначения (general purpose graphics processing unit, GP-GPU). Нейронная сеть, являющаяся формой ML, может рассматриваться как тип функции подбора. Глубокое обучение является одной из реализаций нейронной сети, которая содержит более одного уровня межсоединений искусственных нейронов. Чтобы обучать глубокую нейронную сеть подбирать функцию (например, обучение, использующее большое количество входных выборок и выходных выборок), вес и порог каждого нейрона итеративно обновляются, чтобы минимизировать функцию общих потерь или максимизировать функцию общего выигрыша. Итерация может быть достигнута посредством алгоритма ниспадающего градиента или восходящего обратного распространения по учебным выборкам, которые могут потребовать, чтобы архитектура глубокой нейронной сети и функция потерь или выигрыша были математически дифференцируемыми.
Обучаемость обычно требует следующего: набор функций (архитектура нейронной сети), который определяет границы пространства исследования, внутри которых алгоритм нисходящего градиента может перемещаться; и одна или более функций потерь (или выигрыша), дифференцируемых относительно каждого нейронного коэффициента (для восходящего градиента или нисходящего обучения) на этой архитектуре нейронной сети.
Глубокая нейронная сеть часто используется для выполнения захвата признака и для выполнения прогноза. Захват признака служит для извлечения полезной информации из многих комплексных данных и это можно считать формой снижения размерности. Прогноз содержит интерполяцию или экстраполяцию для формирования новых данных (обычно упоминаемых как предсказанные или оценочные данные) из данных выборок. Обе этих задачи могут предполагать, что входные данные обладают внутренней характеристикой авторегрессии. Например, пиксель изображения обычно обладает некоторой взаимосвязью с его соседними пикселями. Сверточная нейронная сеть (convolutional neural network, CNN) может быть разработана так, чтобы использовать эту взаимосвязь для снижения размерности данных.
В некоторых вариантах осуществления AI/ML используется для конфигурации одного или более подходов системы связи. Не создающие ограничений примеры таких подходов содержат: иерархические уровни, транспортные соединения, релейные соединения, соединения UE, типы TRP и/или развертывание летательных TRP (например, количество TRP в каждом уровне).
В некоторых вариантах осуществления AI/ML реализуется, чтобы помочь сократить количество возможных соединений, которые будет искать UE во время начального доступа. Например, модель ML могла обучаться распознать соединения, имеющие наилучшие характеристики для UE. UE может затем сосредоточиться на этих соединениях во время начального доступа. В некоторых вариантах осуществления AI/ML устанавливает диапазон или порог измерений, чтобы исключить соединения, которые могут показывать низкие характеристики для UE. Например, AI/ML могут определить смещение по мощности, чтобы определить, когда должна выполняться передача управления соединением.
В некоторых вариантах осуществления AI/ML могут быть реализованы, чтобы улучшить измерения и отчетность по каналу, включая определение направления луча. Это может вести, например, к формированию улучшенной CSI с меньшими издержками.
В некоторых вариантах осуществления AI/ML могут быть реализованы, чтобы помочь улучшить координацию центрального узла многочисленных летательных TRP. Например, AI/ML могут координировать перемещение, позиционирование и развертывание летательных TRP, чтобы улучшить характеристики сети.
В некоторых вариантах осуществления AI/ML могут быть реализованы, чтобы помочь центральному узлу сконфигурировать область поиска DCI и слепое декодирование для летательных TRP. AI/ML могут также или вместо этого быть реализованы, чтобы сконфигурировать частоту обновления TA для определенной структуры системы связи.
В некоторых вариантах осуществления AI/ML могут быть реализованы, чтобы улучшить выбор типа TRP, когда TRP способна переключаться между различными типами TRP. AI/ML могут также или вместо этого быть реализованы так, чтобы улучшить выбор радиоинтерфейса, структура канала и/или структура сигнализации для TRP. Этот выбор может быть основан на изученных или измеренных сетевых топологиях и конфигурациях. Например, если летательная TRP способна переключаться между различными типами TRP, AI/ML могут на основе сетевых требований помочь определить, какой тип TRP является подходящим. AI/ML могут также или вместо этого помочь сконфигурировать радиоинтерфейс, структура канала и/или структура сигнализации для летательной TRP. AI/ML могут выполняться в центральном узле и затем результаты сообщаться летательной TRP. Альтернативно, AI/ML могут выполняться в самой летательной TRP.
AI/ML могут быть реализованы любым из множества различных способов в системе связи. В некоторых вариантах осуществления AI/ML выполняются наземной TRP, например, такой как наземная TRP 170 на фиг. 3B. Алгоритм или модель AI/ML могут храниться в памяти 258 и выполняться процессором 250. В некоторых вариантах осуществления AI/ML выполняются космической TRP, например, такой как космическая TRP 172 на фиг. 3C. Алгоритм или модель AI/ML могут быть сохранены в памяти 278 и выполняться процессором 270. Космическая TRP может быть центральным узлом и/или TRP с высокими возможностями базовой станции. В некоторых вариантах осуществления AI/ML выполняется ED, например, таким как ED 110 на фиг. 3A. Алгоритм или модель AI/ML могут храниться в памяти 208 и выполняться процессором 200. В некоторых вариантах осуществления AI/ML могут выполняться выделенным механизмом AI/ML, содержащим память и один или более процессоров.
Следует понимать, что один или более этапов способов вариантов осуществления, представленных здесь, могут выполняться соответствующими блоками или модулями. Например, данные могут передаваться передающим блоком или передающим модулем. Данные могут приниматься приемным блоком или приемным модулем. Данные могут обрабатываться процессором или модулем обработки. Соответствующие блоки/модули могут быть аппаратными средствами, программным обеспечением или их сочетанием. Например, один или более блоков/модулей могут быть интегральными схемами, такими как программируемые логические интегральные схемы (field programmable gate array, FPGA) или прикладными специализированными интегральными схемами (application-specific integrated circuit, ASIC). Следует понимать, что там, где модули являются программными, они могут считываться процессором, полностью или частично, по мере необходимости, индивидуально или совместно для обработки, в единичных или многочисленных экземплярах, по мере необходимости, и что сами модули могут содержать команды для дополнительного развертывания и инстанцирования.
Хотя в представленных вариантах осуществления показаны сочетания признаков, не все они должны объединяться, чтобы реализовывать преимущества различных вариантов осуществления настоящего раскрытия. Другими словами, система или способ, разработанные в соответствии с вариантом осуществления настоящего раскрытия, не обязательно должны содержать все признаки, показанные на любом из чертежей или всех частях, схематично показанных на чертежах. Кроме того, выбранные признаки одного примерного варианта осуществления могут объединяться с выбранными признаками других примерных вариантов осуществления.
Хотя настоящее раскрытие было описано со ссылкой на иллюстративные варианты осуществления, это описание не предназначено истолковываться в ограничивающем смысле. Различные модификации и комбинации иллюстративных вариантов осуществления, а также других вариантов осуществления раскрытия, должны быть очевидны для специалистов в данной области техники при обращении к описанию. Поэтому подразумевается, что приложенная формула изобретения охватывает любые такие модификации или варианты осуществления.

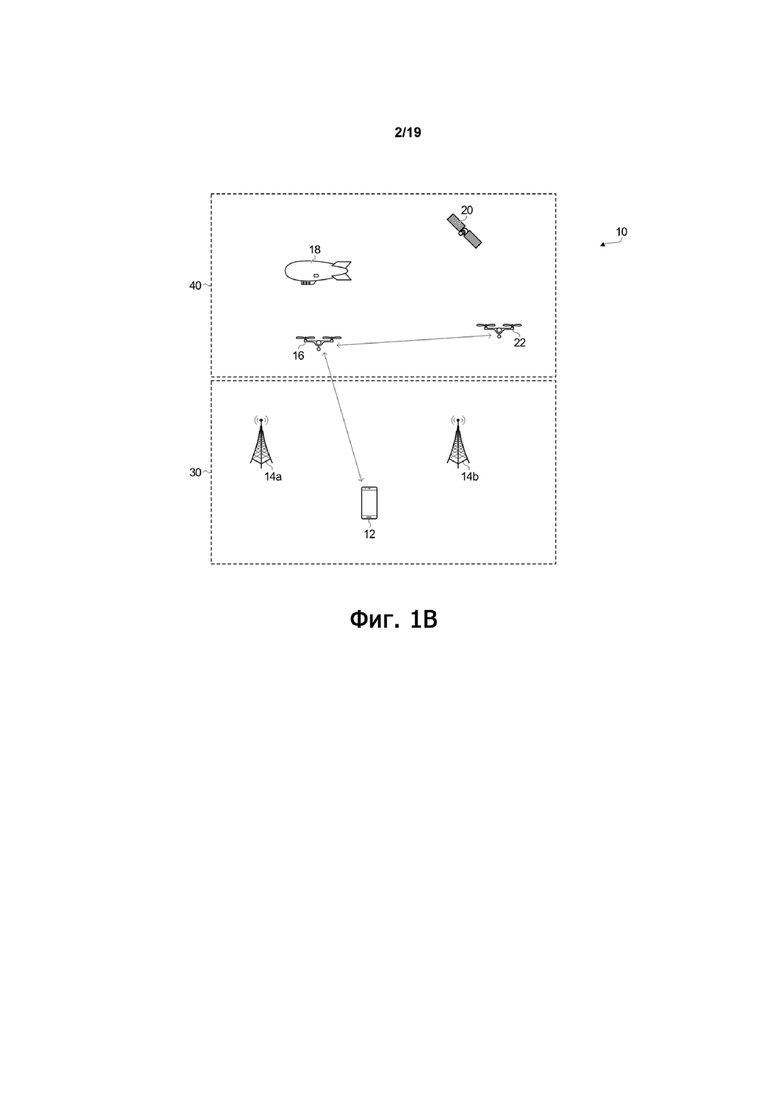
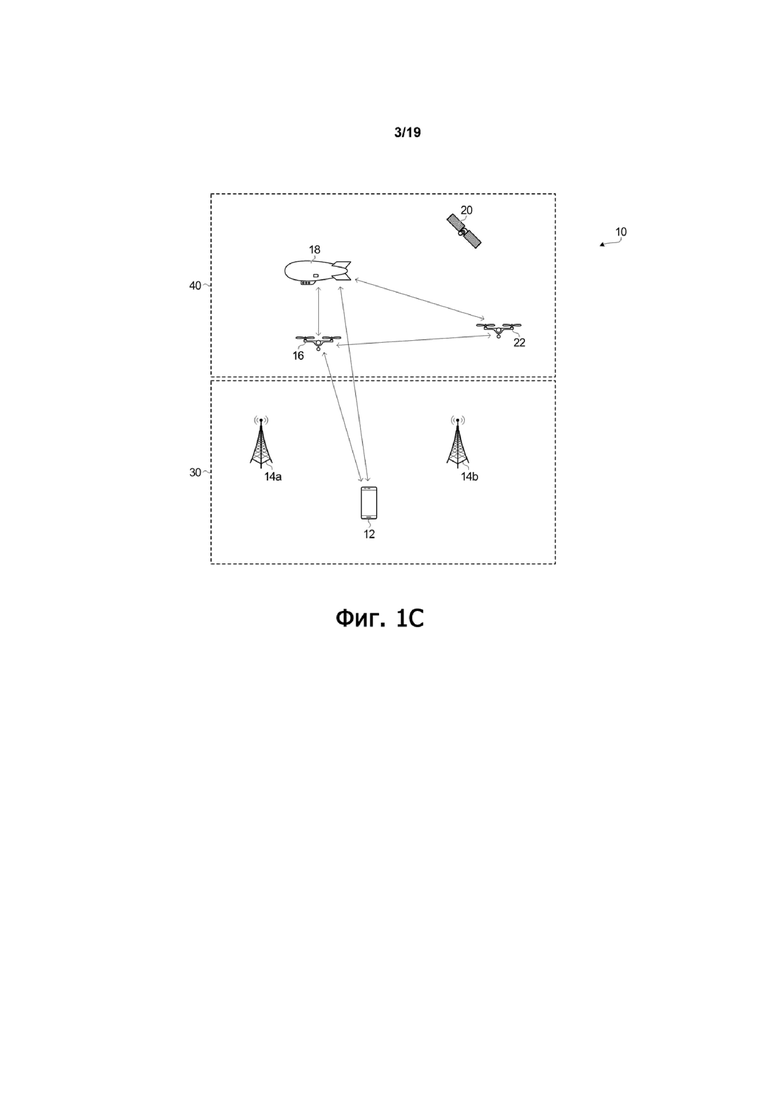






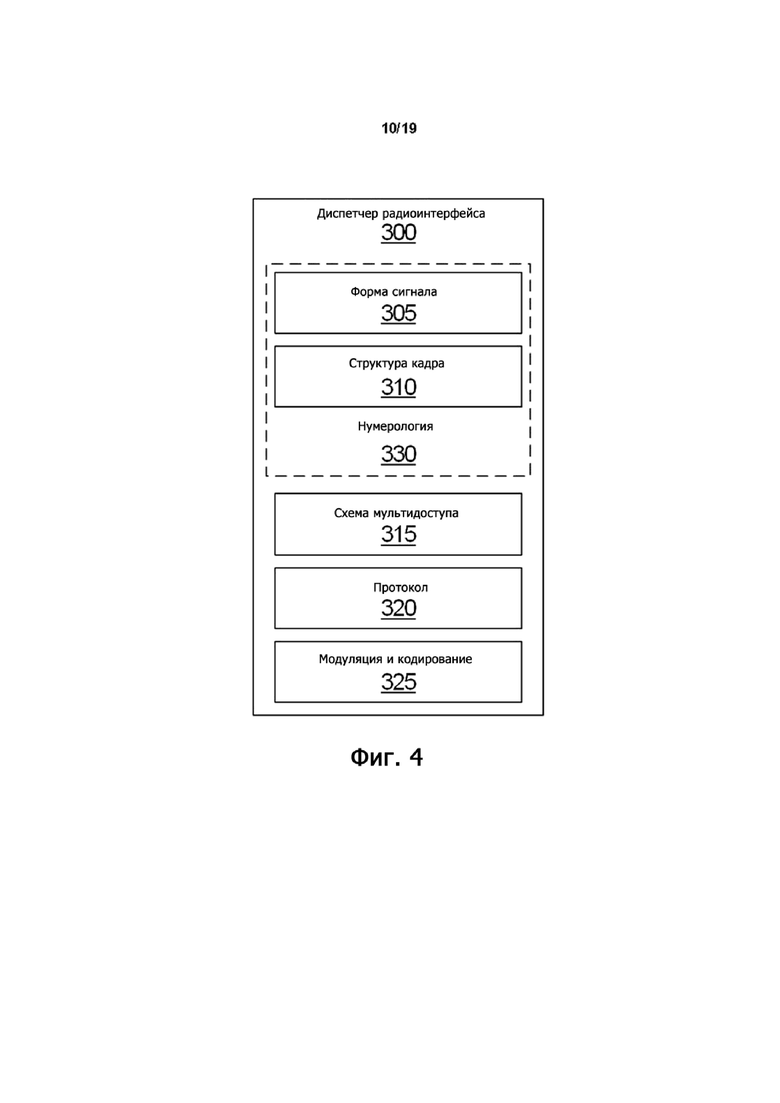




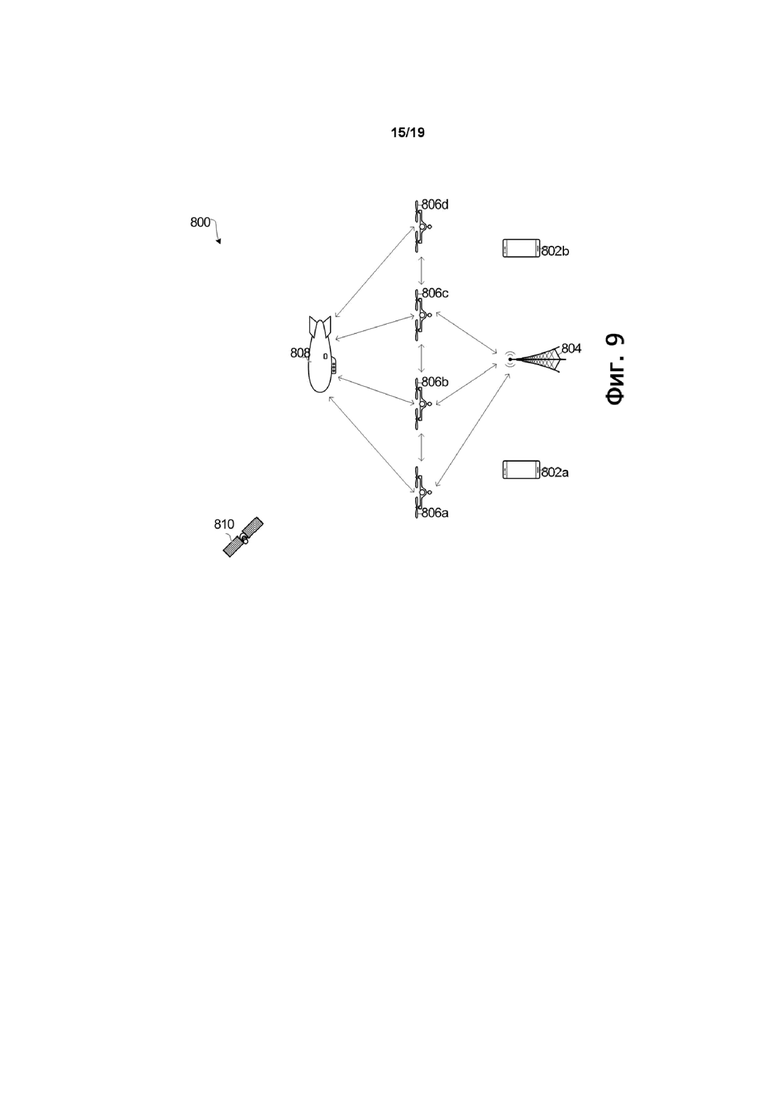




Изобретение относится к системам беспроводной связи, в частности к космическим системам связи. Технический результат изобретения заключается в использовании более гибкой системы связи с расширенным диапазоном покрытия беспроводной связи и улучшенным качеством обслуживания по сравнению с традиционными системами связи. Для этого в способе связи выполняют посредством оборудования пользователя (UE) измерения на первом нисходящем сигнале наземной передающей и приемной точки и на втором нисходящем сигнале космической передающей и приемной точки в сети беспроводной связи. Включают посредством UE первое соединение между UE и наземной передающей и приемной точкой, основываясь на первом результате измерения, равном или превышающем первый порог на первом нисходящем сигнале; и передают или принимают посредством UE первую беспроводную передачу к наземной передающей и приемной точке или от нее в беспроводной сети. В случае если второй порог меньше, чем первый порог, включают посредством UE второе соединение между UE и космической передающей и приемной точкой, основываясь на втором результате измерения, равном или превышающем второй порог на втором нисходящем сигнале, и передают или принимают посредством UE вторую беспроводную передачу к космической передающей и приемной точке или от нее в беспроводной сети. 6 н. и 22 з.п. ф-лы, 22 ил.
1. Способ связи, содержащий:
выполняют посредством оборудования пользователя (user equipment, UE) измерения на первом нисходящем сигнале наземной передающей и приемной точки и на втором нисходящем сигнале космической передающей и приемной точки в сети беспроводной связи, в которой первый нисходящий сигнал содержит первый сигнал синхронизации или первый нисходящий опорный сигнал и второй нисходящий сигнал содержит второй сигнал синхронизации или второй нисходящий опорный сигнал,
включают посредством UE первое соединение между UE и наземной передающей и приемной точкой, основываясь на первом результате измерения, равном или превышающем первый порог на первом нисходящем сигнале; и передают или принимают посредством UE первую беспроводную передачу к наземной передающей и приемной точке или от нее в беспроводной сети; или
включают посредством UE второе соединение между UE и космической передающей и приемной точкой, основываясь на втором результате измерения, равном или превышающем второй порог на втором нисходящем сигнале; и передают или принимают посредством UE вторую беспроводную передачу к космической передающей и приемной точке или от нее в беспроводной сети;
где второй порог меньше, чем первый порог.
2. Способ связи по п. 1, дополнительно содержащий:
выключают посредством UE первое соединение между UE и наземной передающей и приемной точкой, основываясь на первом результате измерения, который ниже первого порога; или
выключают посредством UE второе соединение между UE и космической передающей и приемной точкой, основываясь на втором результате измерения, который ниже второго порога.
3. Способ связи по п. 1, в котором:
включение посредством UE первого соединения между UE и наземной передающей и приемной точкой, основываясь на первом результате измерения, равном или превышающем первый порог на первом нисходящем сигнале, содержит:
включение посредством UE первого соединения в ответ на первый результат измерения, равный или превышающий первый порог; или
сообщение беспроводной сети первого результата измерения; прием первого уведомления от беспроводной сети; и включение посредством UE первого соединения в соответствии с первым уведомлением; и
включение посредством UE второго соединения между UE и космической передающей и приемной точкой, основываясь на втором результате измерения, равном или превышающем второй порог для второго нисходящего сигнала, содержит:
включение посредством UE второго соединения в ответ на первый результат измерения, равный или превышающий первый порог; или
сообщение беспроводной сети второго результата измерения; прием второго уведомления от беспроводной сети; и включение посредством UE второго соединения в соответствии со вторым уведомлением.
4. Способ связи по любому из пп. 1-3, в котором включение посредством UE первого соединения содержит: разрешают все функции на первом соединении или разрешают часть функций на первом соединении; и включение посредством UE второго соединения содержит: разрешают все функции на втором соединении или разрешают часть функций на втором соединении.
5. Способ связи по любому из пп. 2-4, в котором выключение посредством UE первого соединения содержит: запрещают все функции на первом соединении или запрещают часть функций на первом соединении; и выключение посредством UE второго соединения содержит этапы, на которых запрещают все функции на втором соединении или запрещают часть функций на втором соединении.
6. Способ связи по п. 5, в котором запрещение всех функций на первом соединении содержит выключение первого сигнала синхронизации, запрещение всех функций на втором соединении содержит выключение второго сигнала синхронизации; запрещение части функций на первом соединении и запрещение части функций на втором соединении содержит выключение по меньшей мере одной из следующих функций, связанных с наземной передающей и приемной точкой и космической передающей и приемной точкой, соответственно: передача данных к наземной передающей и приемной точке или от нее, измерение и сообщение информации о состоянии канала, управление радиоресурсом или свободный доступ (random access, RA).
7. Способ связи по любому из пп. 1-6, в котором приоритет первого соединения выше, чем приоритет второго соединения, и включение первого соединения или включение второго соединения содержит:
когда разность между вторым результатом измерения и первым результатом измерения находится в пределах смещения, включают второе соединение без включения первого соединения;
когда разность превышает смещение, включают первое соединение без включения второго соединения.
8. Способ связи, содержащий:
принимают посредством базовой станции беспроводной сети первый результат измерений от оборудования пользователя (user equipment, UE), где результат измерений содержит результат измерения первого нисходящего сигнала наземной передающей и приемной точки и второго нисходящего сигнала космической передающей и приемной точки в беспроводной сети, где первый нисходящий сигнал содержит первый сигнал синхронизации или первый нисходящий опорный сигнал, а второй нисходящий сигнал содержит второй сигнал синхронизации или второй нисходящий опорный сигнал;
принимают решение посредством базовой станции включить первое соединение между UE и наземной передающей и приемной точкой, основываясь на первом результате измерения, равном или превышающем первый порог для первого нисходящего сигнала, или включить второе соединение между UE и космической передающей и приемной точкой, основываясь на втором результате измерения, равном или превышающем второй порог для второго нисходящего сигнала;
передают UE посредством базовой станции первое уведомление, где уведомление указывает включить первое соединение; и передают или принимают посредством наземной передающей и приемной точки первую беспроводную передачу к UE или от UE; или
передают UE посредством базовой станции второе уведомление, где уведомление указывает включить второе соединение; и передают или принимают посредством космической передающей и приемной точки вторую беспроводную передачу к UE или от UE;
в котором второй порог меньше первого порога.
9. Способ связи по п. 8, дополнительно содержащий:
принимают решение посредством базовой станции выключить первое соединение, основываясь на первом результате измерения, который ниже первого порога для первого нисходящего сигнала, или выключить второе соединение, основываясь на втором результате измерения, который ниже второго порога для второго нисходящего сигнала; и
передают посредством базовой станции уведомление, указывающее выключить первое соединение или второе соединение, основываясь на принятом решении.
10. Способ связи по п. 8 или 9, в котором включение первого соединения содержит разрешение всех функций на первом соединении или разрешение части функций на первом соединении; и включение второго соединения содержит разрешение всех функций на втором соединении или разрешение части функций на втором соединении.
11. Способ связи по любому из пп. 8-10, в котором выключение первого соединения содержит запрещение всех функций на первом соединении или запрещение части функций на первом соединении; и выключение второго соединения содержит запрещение всех функций на втором соединении или запрещение части функций на втором соединении.
12. Способ связи по п. 11, в котором запрещение всех функций на первом соединении содержит выключение первого сигнала синхронизации, запрещение всех функций на втором соединении содержит выключение второго сигнала синхронизации; запрещение части функций на первом соединении и запрещение части функций на втором соединении содержит выключение по меньшей мере одной из следующих функций, связанных с наземной передающей и приемной точкой и космической передающей и приемной точкой, соответственно; передача данных между UE и наземной передающей и приемной точкой и космической передающей и приемной точкой, измерение и сообщение информации о состоянии канала, управление радиоресурсом или произвольный доступ (random access, RA).
13. Способ связи по любому из пп. 8-12, в котором приоритет первого соединения выше, чем приоритет второго соединения, и включение первого соединения или включение второго соединения содержит:
когда разность между вторым результатом измерения и первым результатом измерения находится в пределах смещения, включают второе соединение без включения первого соединения;
когда разность превышает смещение, включают первое соединение без включения второго соединения.
14. Оборудование пользователя (UE), содержащее: по меньшей мере один процессор, приемопередатчик и антенну, при этом UE выполнено с возможностью:
выполнять измерения для первого нисходящего сигнала наземной передающей и приемной точки и второго нисходящего сигнала космической передающей и приемной точки в беспроводной сети, где первый нисходящий сигнал содержит первый сигнал синхронизации или первый нисходящий опорный сигнал, а второй нисходящий сигнал содержит второй сигнал синхронизации или второй нисходящий опорный сигнал,
включать первое соединение между UE и наземной передающей и приемной точкой, основываясь на первом результате измерения, равном или превышающем первый порог для первого нисходящего сигнала; и передают или принимают посредством UE первую беспроводную передачу к наземной передающей и приемной точке или от нее в беспроводной сети; или
включать второе соединение между UE и космической передающей и приемной точкой, основываясь на втором результате измерения, равном или превышающем второй порог для второго нисходящего сигнала; и передают или принимают посредством UE вторую беспроводную передачу к космической передающей и приемной точке или от нее в беспроводной сети;
где второй порог меньше первого порога.
15. Оборудование пользователя по п. 14, в котором UE дополнительно выполнено с возможностью:
выключать первое соединение между UE и наземной передающей и приемной точкой, основываясь на первом результате измерения, который ниже первого порога; или
выключать второе соединение между UE и космической передающей и приемной точкой, основываясь на втором результате измерения, который ниже второго порога.
16. Оборудование пользователя по п. 14 или 15, в котором
включение первого соединения между UE и наземной передающей и приемной точкой, основываясь на первом результате измерения, который равен или превышает первый порог для первого нисходящего сигнала, содержит:
включение первого соединения в ответ на первый результат измерения, равный или превышающий первый порог; или
сообщение первого результата измерения беспроводной сети; прием первого уведомления от беспроводной сети; и включение посредством UE первого соединения в соответствии с первым уведомлением; и
включение второго соединения между UE и космической передающей и приемной точкой, основываясь на втором результате измерения, который равен или превышает второй порог для второго нисходящего сигнала, содержит:
включение второго соединения в ответ на первый результат измерения, равный или превышающий первый порог; или
сообщение второго результата измерения беспроводной сети; прием второго уведомления от беспроводной сети; и включение посредством UE второго соединения в соответствии со вторым уведомлением.
17. Оборудование пользователя по любому из пп. 14-16, в котором включение первого соединения содержит разрешение всех функций на первом соединении или разрешение части функций на первом соединении; и включение второго соединения содержит разрешение всех функций на втором соединении или разрешение части функций на втором соединении.
18. Оборудование пользователя по любому из пп. 15-17, в котором выключение первого соединения содержит запрещение всех функций на первом соединении или запрещение части функций на первом соединении; и выключение второго соединения содержит запрещение всех функций на втором соединении или запрещение части функций на втором соединении.
19. Оборудование пользователя по п. 18, в котором запрещение всех функций на первом соединении содержит выключение первого сигнала синхронизации, запрещение всех функций на втором соединении содержит выключение второго сигнала синхронизации; запрещение части функций на первом соединении и запрещение части функций на втором соединении содержат выключение по меньшей мере одной из следующих функций, связанных с наземной передающей и приемной точкой и космической передающей и приемной точкой, соответственно: передача данных к наземной передающей и приемной точке или от нее, измерение и сообщение информации о состоянии канала, управление радиоресурсом или произвольный доступ (random access, RA).
20. Оборудование пользователя по любому из пп. 14-19, в котором приоритет первого соединения выше, чем приоритет второго соединения и включение первого соединения или включение второго соединения содержит:
когда разность между вторым результатом измерения и первым результатом измерения находится в пределах смещения, включают второе соединение без включения первого соединения;
когда разность превышает смещение, включают первое соединение без включения второго соединения.
21. Базовая станция, содержащая: по меньшей мере один процессор, приемопередатчик и антенну, при этом базовая станция выполнена с возможностью:
принимать первый результат измерения от оборудования пользователя (user equipment, UE), в котором результат измерения содержит результат измерения для первого нисходящего сигнала наземной передающей и приемной точки и для второго нисходящего сигнала космической передающей и приемной точки в беспроводной сети, в котором первый нисходящий сигнал содержит первый сигнал синхронизации или первый нисходящий опорный сигнал, и второй нисходящий сигнал содержит второй сигнал синхронизации или второй нисходящий опорный сигнал;
принимать решение включить первое соединение между UE и наземной передающей и приемной точкой, основываясь на первом результате измерения, равном или превышающем первый порог для первого нисходящего сигнала, или включить второе соединение между UE и космической передающей и приемной точкой, основываясь на втором результате измерения, равном или превышающем второй порог для второго нисходящего сигнала;
передавать первое уведомление к UE, в котором уведомление указывает включить первое соединение; и передавать или принимать посредством наземной передающей и приемной точки первую беспроводную передачу к UE или от него; или
передавать второе уведомление к UE, в котором уведомление указывает включить второе соединение; и передавать или принимать посредством космической передающей и приемной точки вторую беспроводную передачу к UE или от него;
где второй порог меньше первого порога.
22. Базовая станция по п. 21, в которой базовая станция дополнительно выполнена с возможностью:
принять решение о выключении первого соединения, основываясь на первом результате измерения, который ниже первого порога для первого нисходящего сигнала, или о выключении второго соединения, основываясь на втором результате измерения, который ниже второго порога для второго нисходящего сигнала; и
передать уведомление, указывающее выключить первое соединение или второе соединение, основываясь на принятом решении.
23. Базовая станция по п. 21 или 22, в которой включение первого соединения содержит разрешение всех функций на первом соединении или разрешение части функций на первом соединении; и включение второго соединения содержит разрешение всех функций на втором соединении или разрешение части функций на втором соединении.
24. Базовая станция по любому из пп. 21-23, в которой выключение первого соединения содержит запрещение всех функций на первом соединении или запрещение части функций на первом соединении; и выключение второго соединения содержит запрещение всех функций на втором соединении или запрещение части функций на втором соединении.
25. Базовая станция по п. 24, в которой запрещение всех функций на первом соединении содержит выключение первого сигнала синхронизации, запрещение всех функций на втором соединении содержит выключение второго сигнала синхронизации; запрещение части функций на первом соединении и запрещение части функций на втором соединении содержит выключение по меньшей мере одной из следующих функций, связанных с наземной передающей и приемной точкой и космической передающей и приемной точкой, соответственно: передача данных между UE и наземной передающей и приемной точкой и космической передающей и приемной точкой, измерение и сообщение информации о состоянии канала, управление радиоресурсом или произвольный доступ (random access, RA).
26. Базовая станция по любому из пп. 21-25, в которой приоритет первого соединения выше, чем приоритет второго соединения, и включение первого соединения или включение второго соединения содержит:
включение второго соединения без включения первого соединения, когда разность между вторым результатом измерения и первым результатом измерения находится в пределах смещения;
включение первого соединения без включения второго соединения, когда разность превышает смещение.
27. Считываемый компьютером носитель, хранящий команды, которые, когда исполняются компьютером, заставляют компьютер выполнять способ по любому из пп. 1-7.
28. Считываемый компьютером носитель, хранящий команды, которые, когда исполняются компьютером, заставляют компьютер выполнять способ по любому из пп. 8-13.
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| CN 105744231 А, 06.07.2016 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЛИ ПРИЕМА СИГНАЛА В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2018 |
|
RU2699407C1 |
| Токарный резец | 1924 |
|
SU2016A1 |

