Предлагаемое изобретение относится к области электроэнергетики и может быть использовано в электроэнергетических системах, системах электроснабжения, электрических сетях преимущественно соизмеримой мощности генерации и единичного потребления для контроля успешности прямых пусков асинхронных двигателей (АД) общего назначения.
Известен способ плавного пуска АД с короткозамкнутым ротором (Патент RU 2 625 807 C2), характеризующийся следующей совокупностью признаков: трехфазное напряжение подают на статорные обмотки АД от шин сети через три пары встречно-параллельно включенных тиристоров, управляемых о синхронизированной системы импульсно-фазового управления, на вход которой по команде «Пуск» подают предварительно сформированный сигнал управления, эквивалентный углу открывания тиристоров, причем сигнал управления формируют путем непрерывного измерения остаточного напряжения на шинах сети и сравнения его с предварительно заданным значением этого напряжения, при отключении от которого сигнал управления корректируют, поддерживая постоянным остаточное напряжение на шинах сети в процессе пуска, дополнительно измеряют падение напряжения на тиристорах и сравнивают его с предварительно заданным, при превышении которого, по прошествии предварительно заданного времени, формируют команду «Стоп», обеспечивая отключение двигателя при затяжном или несостоявшемся пуске.
Однако указанный способ обладает следующими недостатками: требует дорогостоящего оборудования; не учитывает влияние текущих значений режимных параметров на шинах АД до пуска, частоты питающей сети на процесс пуска, а также не учитывает влияние пускового режима АД на баланс активной мощности в малой энергосистеме, как следствие, на режим работы генерирующих агрегатов; превышение допустимой длительности пуска определяется фактическим превышением заблаговременно заданного значения, что повышает тепловую нагрузку на АД и продолжительность воздействия пускового режима двигателя на питающую сеть.
Известно устройство оценивания параметров и процессов АД (Патент RU 2 543 495 C1), предназначенное для определения параметров АД по регистрациям переходного процесса, характеризующееся следующей совокупностью признаков: содержит датчики фазных напряжений, датчики фазных токов статора, преобразователь фазных напряжений и фазных токов статора, позволяющие преобразовывать фазные напряжения и токи статора в напряжения и токи в d, q координатную систему обобщенной машины, пять блоков расчета параметров, сумматоры, настраиваемую модель АД, которые позволяют производить расчет параметров, переменных величин и частоты вращения асинхронного двигателя без использования датчиков частоты вращения, углового ускорения и устройств дифференцирования при использовании метода, основанного на генерировании функции чувствительности токов фаз статора обобщенной машины по параметрам АД.
Однако указанное устройство не может быть использовано для контроля пуска АД в темпе процесса, т.к. используемый в нем метод идентификации нуждается в предварительно заданных начальных значениях оценок параметров АД, а длительность процесса идентификации параметров, составляющая 40 секунд, не приемлема для контроля процесса в реальном времени.
Кроме того, известен способ прямого пуска асинхронного двигателя (Вольдек А.И., Попов В.В. Электрические машины. Машины переменного тока: Учебник для вузов. - СПБ: Питер, 2008. - 350 с., стр. 134-140.) являющийся прототипом предлагаемого изобретения и заключающийся в том, что полное трехфазное напряжение на статорные обмотки АД подается после проверки нормальности напряжения питающей сети и, в случае ненормальности напряжения после включения или длительного превышения перегрузочной способности по току, двигатель отключается от питающей сети.
Однако указанный способ обладает следующими недостатками: при пуске потребляется пусковой ток, превышающий на порядок номинальный, что вызывает снижение напряжения в прилегающей сети с угрозой развития лавины напряжения при опрокидывании других работающих двигателей и критическое термическое воздействие на АД при затяжных пусках; не контролируется и не учитывается влияние частоты питающей сети на процесс пуска и не прогнозируется продолжительность пуска двигателя.
Задачей предлагаемого изобретения является предотвращение повреждения асинхронных двигателей или оборудования питающих сетей, сохранение их ресурса работоспособности в процессах неуспешных прямых пусков двигателей путем их выявления на ранних стадиях и прерывания.
Поставленная задача решается за счет того, что в известном способе, заключающимся в предварительной проверке нормальности напряжения питающей сети, подаче напряжения на статорные обмотки двигателя и, в случае ненормальности напряжения после включения или длительного превышения перегрузочной способности по току, производят отключение двигателя от питающей сети, дополнительно измеряют частоту питающей сети и активную мощность двигателя, контролируют допустимость напряжения, частоты и длительности токовой перегрузки двигателя после его включения на четырех этапах, на которых определяют электрические параметры двигателя, критические параметры режима для двигателя и питающей сети, проводят проверку соблюдения промежуточных условий успешности пуска, при невыполнении которых на любом из этапов, производят отключение двигателя от питающей сети.
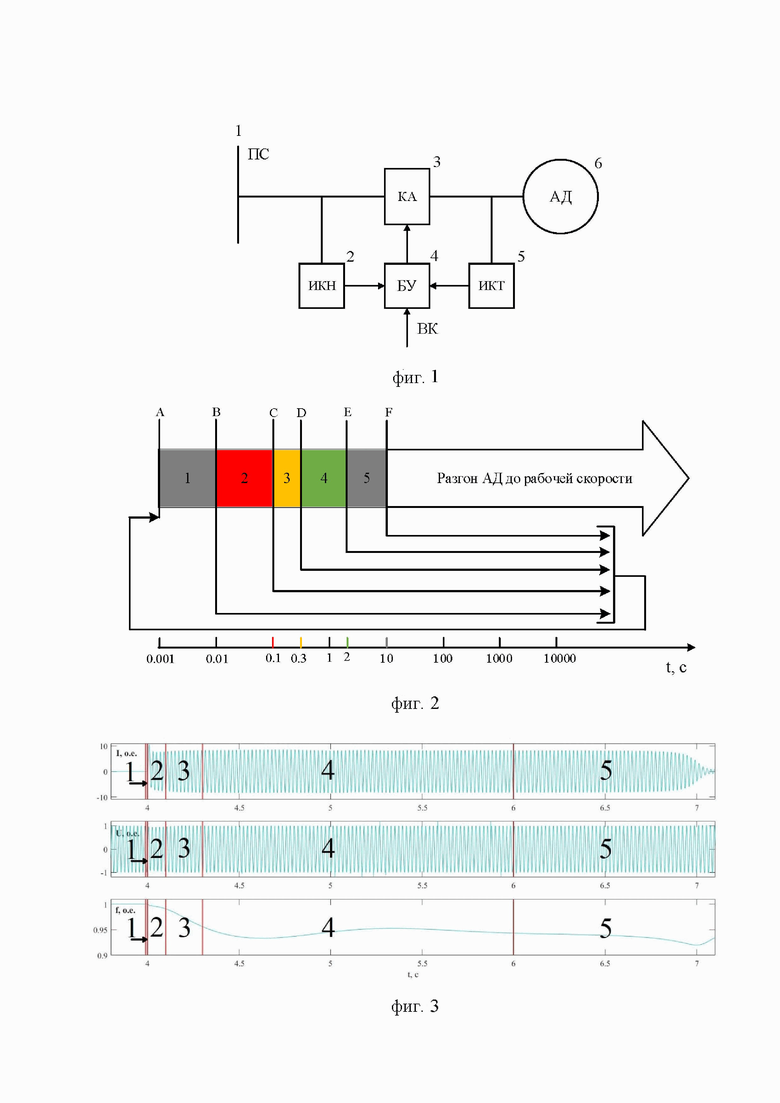
Реализация способа поясняется структурной схемой подключения двигателя к питающей сети с устройством контроля успешности пуска (фиг. 1), обобщенной структурой процесса контроля успешности пуска АД (фиг.2), графиками изменения режимных параметров сети во времени при успешном пуске АД (фиг. 3) и Г-образной схемой замещения АД (фиг 4).
Структурная схема (фиг 1) содержит: 1 - питающая сеть (ПС); 2 - измерительный блок напряжения (ИКН); 3 - коммутационный аппарат (КА); 4 - блок управления (БУ) пуском АД, в который поступает внешняя команда (ВК) на включение или отключение двигателя; 5 - измерительный блок тока (ИКТ); 6 - АД.
Обобщённая структура процесса контроля успешности пуска АД (фиг. 2) и графики изменения режимных параметров питающей сети при успешном пуске АД (фиг. 3) разделены на пять этапов: 1 - блокировка пуска двигателя; 2 - экспресс оценка его допустимости по необходимым условиям; 3 - оценка допустимости по достаточным условиям; 4 - оценка допустимости длительности пуска; 5 - запрет повторного включения.
Способ осуществляется следующим образом: в момент времени А АД находится в режиме ожидания ВК на включение. После ее получения, на этапе 1 до момента B БУ производится оценка возможности пуска АД по данным ИКН. Напряжение в узле нагрузки и частота питающей сети для выполнения первичного прямого пуска АД должны удовлетворять следующим условиям:
 (1)
(1)
 (2)
(2)
где  - напряжение на шинах АД до пуска,
- напряжение на шинах АД до пуска,  - минимально допустимое напряжение в узле нагрузки,
- минимально допустимое напряжение в узле нагрузки,  - значение частоты до пуска двигателя,
- значение частоты до пуска двигателя,  - минимально допустимая частота питающей сети.
- минимально допустимая частота питающей сети.
Для последующих пусков совместно учитываются следующие условия:
где  - минимальное напряжение для успешного пуска АД,
- минимальное напряжение для успешного пуска АД,  - предельное значение частоты в сети для успешного пуска АД,
- предельное значение частоты в сети для успешного пуска АД,  - предельно допустимое минимальное значение частоты в сети по условию срабатывания технологической автоматики генерирующих агрегатов.
- предельно допустимое минимальное значение частоты в сети по условию срабатывания технологической автоматики генерирующих агрегатов.
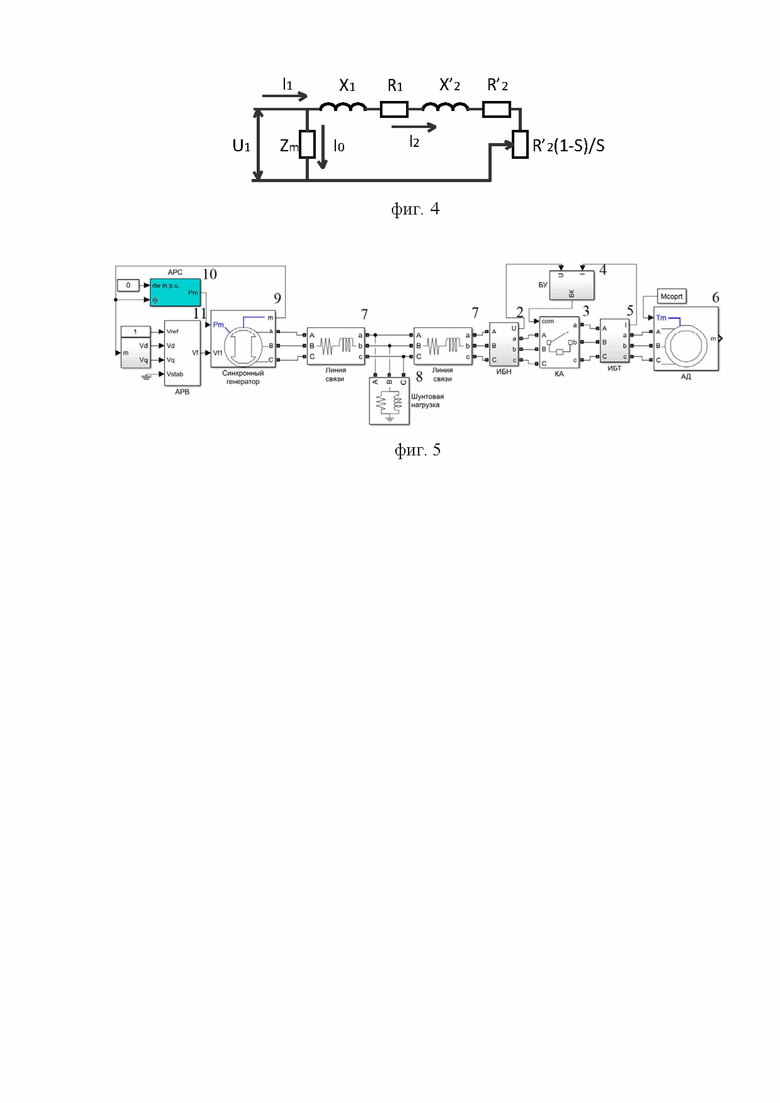
При соблюдении условий успешности до пуска, БУ разрешает исполнение команды на включение КА, производится прямой пуск двигателя, На этапе 2 БУ известным методом определяет параметры математической модели АД (фиг 4), и критические значения параметров (напряжения и частоты) режима питающей сети для успешного пуска двигателя, проверяется выход параметров за критические и нормативно допустимые значения, при выходе за нормативно допустимые значения отключает двигатель, а критические параметры используются на 3-м этапе.
Определение электрических параметров математической модели АД производится по методу наименьших квадратов по выражениям:
где  - реактанс статора,
- реактанс статора, - приведенный к статору реактанс ротора,
- приведенный к статору реактанс ротора, - активное сопротивление статора,
- активное сопротивление статора,  - приведенное к статору активное сопротивление ротора,
- приведенное к статору активное сопротивление ротора,  - активная мощность, потребляемая двигателем,
- активная мощность, потребляемая двигателем,  - реактивная мощность, потребляемая двигателем,
- реактивная мощность, потребляемая двигателем,  - действующее значение фазного тока двигателя.
- действующее значение фазного тока двигателя.
Критическое напряжение определяется по выражению:
где  - момент сопротивления приводного механизма на валу АД,
- момент сопротивления приводного механизма на валу АД,  - суммарный реактанс ротора и статора,
- суммарный реактанс ротора и статора,  - суммарное активное сопротивление ротора и статора,
- суммарное активное сопротивление ротора и статора,  - угловая скорость магнитного поля статора.
- угловая скорость магнитного поля статора.
При наличии ретроспективных данных момент сопротивления приводного механизма принимается равным электромагнитному моменту в нормальном квазиустановившемся режиме, предшествующем текущему пуску двигателя, в противном случае - номинальному.
Критическая частота для пуска АД определяется по следующему выражению:
где,  - критическая угловая скорость магнитного поля статора для успешного пуска АД,
- критическая угловая скорость магнитного поля статора для успешного пуска АД,  - величина угловой скорости магнитного поля статора АД на момент пуска.
- величина угловой скорости магнитного поля статора АД на момент пуска.
В момент C БУ проверяет соблюдение следующих условий:
где  - значение частоты при пуске двигателя,
- значение частоты при пуске двигателя,  - напряжение на шинах АД при пуске.
- напряжение на шинах АД при пуске.
На этапе 3 БУ производит прогностический расчет квазиустановившегося значения частоты напряжения с учетом работы регуляторов скорости генерирующих агрегатов, путем экстраполяции зависимостей частоты от времени, характер изменения которой (на фиг.3 на интервале от 4 до 4,6 с) описывается аппроксимирующей функций:
 (3)
(3)
где - частота ПС на момент пуска,
- частота ПС на момент пуска,  - минимальное значение частоты ПС при пуска АД,
- минимальное значение частоты ПС при пуска АД,  - декремент затухания частоты,
- декремент затухания частоты, - время относительно начала определения результирующего значения частоты при пуске АД,
- время относительно начала определения результирующего значения частоты при пуске АД,  - фактическое значение частоты ПС
- фактическое значение частоты ПС
Минимальное значение частоты сети при пуске АД определяется по выражению (3):

где
Значение напряжения с учетом действия регуляторов возбуждения, как наименее инерциального режимного параметра, принимается равным фактическому на момент окончания зондирующего интервала. В момент D БУ выполняет проверку соблюдения следующих условий с учетом влияния регуляторов генерирующих агрегатов:
 (4)
(4)
 (5)
(5)
На этапе 4 БУ определяет прогностическую длительность пуска и знак скорости изменения потребляемой активной мощности, при выявлении положительного значения которой по экстраполяции зависимости активной мощности от времени определяет продолжительность разгона до нормальной установившейся скорости. При выявлении устойчивого знака скорости изменения активной мощности производит расчёт продолжительности пуска:

где  - время, за которое двигатель достигнет нормальных рабочих оборотов,
- время, за которое двигатель достигнет нормальных рабочих оборотов,  - значение потребляемой активной мощности, соответствующее критическому скольжению,
- значение потребляемой активной мощности, соответствующее критическому скольжению,  - значение активной мощности на момент выявления устойчивого разгона двигателя,
- значение активной мощности на момент выявления устойчивого разгона двигателя,  - время от начала пуска до момента выявления устойчивого разгона двигателя.
- время от начала пуска до момента выявления устойчивого разгона двигателя.
В момент E в БУ выполняется проверка допустимости длительности пуска АД по следующему условию:
где  - максимально допустимое время пуска АД по условию допустимости снижения напряжения в смежных нагрузочных узлах или по условию предельного термического воздействия.
- максимально допустимое время пуска АД по условию допустимости снижения напряжения в смежных нагрузочных узлах или по условию предельного термического воздействия.
На этапе 5 до момента времени F БУ находится в режиме ожидания команды на запрет повторного пуска двигателя для предотвращения бесконечности циклов пуска АД или исключения включения после принудительного основа.
При несоблюдении условий успешности пуска АД в представленные моменты, БУ выдает команду на отключение двигателя с последующим запретом повторного включения двигателя без улучшения условий его пуска.
Проверка способа осуществлена путем цифрового моделирования процессов пуска АД в системе соизмеримой мощности генерации и АД при вариации их условий в программном комплексе MATLAB/Simulink.
Цифровая модель системы соизмеримой мощности генерации и АД (фиг.5) состоит: 6 - АД (номинальная мощность - 75 кВА; номинальное напряжение - 400 В; номинальная частота - 50 Гц; активное сопротивление статора - 0,036 Ом; активное сопротивление ротора - 0,021; индуктивность рассеяния статора, ротора - 0,00034 Гн; инерция - 1,25 кг*м^2; число пар полюсов - 1); 7 - линии связи; 8 - шунтовой нагрузки мощностью 1,11+j0,01 МВА; 9 - синхронного генератора (номинальная мощность - 2 МВА; номинальное напряжение - 400 В; номинальная частота - 50 Гц; индуктивное сопротивление по продольной оси (d) - 2.11 о.е.; переходное индуктивное сопротивление по продольной оси (d) - 0,17 о.е.; сверхпереходное сопротивление по продольной оси (d) - 0,13 о.е.; индуктивное сопротивление по поперечной оси (q) - 1,56 о.е.; сверхпереходное сопротивление по поперечной оси (q) - 0,23 о.е.; переходная постоянная времени ротора при короткозамкнутом статоре - 0,33 с; сверхпереходная постоянная времени ротора при короткозамкнутом статоре по продольной оси (d), по поперечной оси (q) -0,03 c; коэффициент инерции - 0,3072 с; число пар полюсов - 2); 10 - автоматический регулятор скорости (АРС) синхронного генератора; 11 - астатический автоматический регулятор возбуждения (АРВ) синхронного генератора.
Условия пуска АД (вариации: момента сопротивления приводного механизма (Mсопрт); напряжения на шинах АД до пуска (U0); сопротивления связи (Zсв) двигателя и генератора; частоты ПС до пуска двигателя (f0)) и результаты работы способа представлены в табл. 1.
Табл.1
(Mсопрт = 101 Н*м)
(Mсопрт = 101 Н*м)
0.24 с
(Mсопрт = 200 Н*м)
0.23 с
0.3 с
Результаты подтверждают работоспособность и эффективность предлагаемого способа, т.к. в 89% случаев БУ верно выявлял исход процесса пуска и выдавал/невыдавал команды его прерывания на разных этапах, в 11 % случаев (8, 9, 17, 30, 31 (табл. 1)) прерывание было излишним.
Таким образом техническим результатом является выявление на ранних стадиях процесса пуска АД его неуспешности с последующим отключением АД для предотвращения его повреждения или повреждения оборудования питающих сетей, сохранения их ресурса работоспособности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО ПУСКА И ТОРМОЖЕНИЯ ЭЛЕКТРОПРИВОДОВ ОТ АВТОНОМНОГО ИСТОЧНИКА ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ СОИЗМЕРИМОЙ МОЩНОСТИ | 2014 |
|
RU2596165C2 |
| Способ испытания асинхронного электродвигателя | 1983 |
|
SU1108371A1 |
| СПОСОБ ПУСКА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2572097C1 |
| СПОСОБ ПУСКА ЭЛЕКТРОДВИГАТЕЛЯ ЧАСТОТНОГО ПРИВОДА С ОГРАНИЧЕННОЙ МОЩНОСТЬЮ ИСТОЧНИКА ПИТАНИЯ | 1999 |
|
RU2153759C1 |
| СПОСОБ АДАПТАЦИИ УСТАВКИ ТОКООГРАНИЧЕНИЯ ДЛЯ ФОРМИРОВАНИЯ ПУСКО-ТОРМОЗНЫХ ТРАЕКТОРИЙ АСИНХРОННЫХ ДВИГАТЕЛЕЙ НАСОСНЫХ АГРЕГАТОВ | 2011 |
|
RU2461951C1 |
| Способ противоаварийного управления режимом параллельной работы синхронных генераторов и делительной автоматики в электрических сетях | 2018 |
|
RU2692054C1 |
| СПОСОБ ОПТИМАЛЬНОГО ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402865C1 |
| СВЕРХПРОВОДНИКОВАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1992 |
|
RU2023341C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРЁХФАЗНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2017 |
|
RU2735092C2 |
| Привод стиральной машины | 1988 |
|
SU1583501A1 |
Изобретение относится к области электроэнергетики и может быть использовано в электроэнергетических системах, системах электроснабжения, электрических сетях преимущественно соизмеримой мощности генерации и наиболее крупных асинхронных двигателей для контроля их прямых пусков. Технический результат – предотвращение выходов из строя оборудования питающей сети и асинхронного двигателя при прямом пуске за счет поэтапного контроля динамики пуска, скорости и величины изменения напряжения, частоты питающей сети с противоаварийным прерыванием. Способ заключается в том, что процесс пуска асинхронного двигателя разделен на пять этапов, на каждом из которых производится непрерывное измерение мгновенных значений тока и напряжения двигателя, по результатам измерений определяются электрические параметры двигателя и критические параметры режима для двигателя и питающей сети для каждого этапа, в конце этапов проводится проверка соблюдения условий пуска, при невыполнении которых производится противоаварийное отключение двигателя от питающей сети. 5 ил., 1 табл.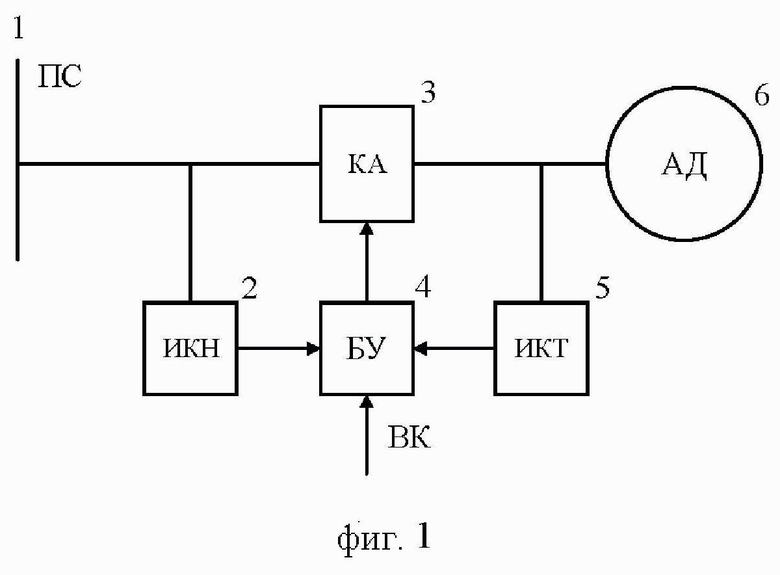
Способ контроля прямого пуска асинхронного двигателя, заключающийся в том, что проверяют нормальность напряжения питающей сети, включают двигатель в сеть, в случае недопустимого снижения напряжения в сети или длительного превышения допустимого тока отключают двигатель, отличающийся тем, что измеряют напряжение и частоту питающей сети, ток и активную мощность двигателя, определяют его электромагнитный момент в течение всего процесса пуска двигателя, пуск двигателя блокируют или прерывают поэтапно, где на первом этапе до включения двигателя проверяют условия допустимости пуска по напряжению и частоте питающей сети и, при их невыполнении, включение двигателя блокируют, на втором этапе после включения двигателя по результатам измерений методом наименьших квадратов рассчитывают электрические параметры математической модели режима двигателя и критические напряжение и частоту для пуска двигателя, принимая при наличии ретроспективных данных момент механической нагрузки двигателя равным его электромагнитному моменту в нормальном предшествующем пуску режиме или номинальному в условиях их отсутствия, проверяют условия допустимости напряжения и частоты питающей сети, при невыполнении условий двигатель отключают, на третьем этапе рассчитывают прогнозные квазиустановившиеся значения частоты и напряжения после действия автоматических регуляторов скорости и возбуждения генерирующих агрегатов питающей сети, проверяют условия их допустимости для генераторных агрегатов питающей сети и двигателя, в случае недопустимых значений напряжения или частоты питающей сети для пуска двигателя или работы генераторных агрегатов двигатель отключают, на четвертом этапе контролируют зависимость активной мощности двигателя от времени, при выявлении положительного знака скорости изменения потребляемой активной мощности рассчитывают прогнозируемую длительность пуска, при недопустимой продолжительности пуска или отсутствии положительного знака изменения потребляемой активной мощности двигатель отключают, на пятом этапе вводят запрет повторного включения двигателя на заданное время.
| Устройство управления пуском асинхронного двигателя | 2020 |
|
RU2737953C1 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ И ПРОЦЕССОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2013 |
|
RU2543495C1 |
| СПОСОБ ПЛАВНОГО ПУСКА АСИНХРОННОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2016 |
|
RU2625807C2 |
| CN 104460503 A, 25.03.2015 | |||
| CN 108075707 A, 25.05.2018 | |||
| CN 114900074 A, 12.08.2022. | |||

