Изобретение относится к регулируемому асинхронному электроприводу и может быть использовано при регулировании асинхронных двигателей, в частности двигателей с короткозамкнутым ротором, в том числе тяговых. Конкретно изобретение относится к системам асинхронного привода, в которых асинхронный двигатель питается от источника регулируемого напряжения, например автономного инвертора напряжения, циклоконвертора и т.п. Такие источники позволяют реализовать любое желаемое напряжение и частоту питания двигателя с точностью, быть может, до высокочастотной модуляционной составляющей, и в пределах известных ограничений выходного тока и напряжения преобразователя, определяемых используемыми силовыми приборами.
Известны способы частотного управления асинхронными двигателями, в которых амплитуда и частота напряжения питания двигателя изменяются согласованно, так, чтобы обеспечить требуемую частоту вращения ротора двигателя. Для повышения КПД двигателя используется формирование оптимального соотношения между изменениями фазы и амплитуды напряжения питания, позволяющего, при данном (текущем) значении развиваемого момента, минимизировать потери энергии в двигателе. Для этого значение частоты скольжения ωs формируется, как известно из теории частотного управления (см., например, Булгаков А.А. Частотное управление асинхронными двигателями. М. Энергоиздат, 1982, 216 с., с.51-78), постоянным по величине и равным оптимальному по потерям в двигателе, ωs=ωs oпт. Значение ωs oпт определяется экспериментально или теоретически. В частности, оно может теоретически определяться по формуле ωs oпт=Rr/Lr, где Rr и Lr - активное сопротивление и индуктивность обмотки ротора соответственно. Частота скольжения может быть пропорциональна электромагнитному моменту, ωs=Mz(ω1H-ω2H)/МН, где MH - номинальный электромагнитный момент асинхронного двигателя, Нм; ω1H - номинальная синхронная частота вращения асинхронного двигателя, рад/с; ω2H - номинальная частота вращения асинхронного двигателя, рад/с.
Наиболее близким к изобретению среди систем частотного управления является способ управления асинхронным двигателем, заключающийся в том, что измеряют частоту вращения ротора асинхронного двигателя f, вводят в регулятор напряжения разность между заданной и текущей частотами вращения ротора асинхронного двигателя, определяют частоту напряжения суммированием частоты вращения ротора асинхронного двигателя и оптимальной частотой скольжения; оптимальное скольжение определяют по формуле  , величину напряжения асинхронного двигателя - по формуле
, величину напряжения асинхронного двигателя - по формуле  , изменяют частоту и величину напряжения на асинхронном двигателе в соответствии с требуемыми значениями, где Mz - требуемый момент асинхронного двигателя; MN - номинальный момент двигателя; f1N - номинальная синхронная частота вращения двигателя; f2N - номинальная частота вращения двигателя (описание к патенту Российской Федерации на изобретение №2294050 C2, опубл. 20.02.2007). Использование известных способов позволяет регулировать скорость вращения ротора двигателя в широком диапазоне с коэффициентом мощности и перегрузочной способностью, близкими к номинальным значениям.
, изменяют частоту и величину напряжения на асинхронном двигателе в соответствии с требуемыми значениями, где Mz - требуемый момент асинхронного двигателя; MN - номинальный момент двигателя; f1N - номинальная синхронная частота вращения двигателя; f2N - номинальная частота вращения двигателя (описание к патенту Российской Федерации на изобретение №2294050 C2, опубл. 20.02.2007). Использование известных способов позволяет регулировать скорость вращения ротора двигателя в широком диапазоне с коэффициентом мощности и перегрузочной способностью, близкими к номинальным значениям.
Недостатками известных способов является то, что вследствие изменения частоты скольжения потери в двигателе увеличиваются по сравнению с потерями при оптимальной постоянной частоте скольжения; кроме того, увеличение электромагнитного момента и увеличение частоты вращения неизбежно приводят к ограничению как тока, так и напряжения силового преобразователя, питающего асинхронный двигатель, что не позволяет реализовать максимальный электромагнитный момент двигателя. Повышение КПД и реализация максимального момента, с учетом ограничений тока и напряжения, особенно важны в тяговых приводах вследствие ограниченных ресурсов мощности и необходимости повышения эффективности тяговых приводов, в которых КПД и полное использование ресурсов силового преобразователя являются основными критериями качества работы привода.
Техническим результатом, который обеспечивается изобретением, является обеспечение максимального значения КПД двигателя, если такой режим реализуем, и обеспечение реализации максимальных электромагнитных моментов в системах частотного управления асинхронными двигателями с учетом ограничения тока и напряжения силового преобразователя, питающего двигатель.
При ограничениях выходного напряжения U0 и тока I0 силового преобразователя, питающего двигатель, что характерно для регулируемых приводов, особенно тяговых:
- обеспечиваются минимальные потери в двигателе, если при текущем значении частоты вращения ротора и заданном электромагнитном моменте Mz ограничения предельно допустимых значений амплитуды напряжения и тока на выходе силового преобразователя не достигаются;
- обеспечивается условный минимум потерь в двигателе при данных уровнях ограничения напряжения и тока на выходе силового преобразователя, если заданный момент Mz не реализуем при оптимальном значении скольжения, но реализуем при больших значениях скольжения без превышения уровней ограничения напряжения и тока;
- обеспечивается максимально реализуемый электромагнитный момент при данных уровнях ограничения напряжения и тока на выходе силового преобразователя, если заданный момент Mz не реализуем.
Указанный технический результат обеспечивается тем, что в способе частотного управления асинхронным двигателем с короткозамкнутым ротором, питаемым от силового преобразователя, задают максимально допустимое значения тока I0 на выходе силового преобразователя, в каждый момент времени задают требуемое значение электромагнитного момента Mz, измеряют круговую частоту вращения ротора асинхронного двигателя ω и напряжение Ud звена постоянного тока силового преобразователя, питающего двигатель, определяют значения круговой частоты оптимального скольжения ωопт, круговой частоты критического скольжения из выражения  максимально допустимого напряжения на выходе силового преобразователя из выражения
максимально допустимого напряжения на выходе силового преобразователя из выражения  и максимального электромагнитного момента Mzmax, развиваемого асинхронным двигателем, из выражения
и максимального электромагнитного момента Mzmax, развиваемого асинхронным двигателем, из выражения  задают значение реализуемого электромагнитного момента Mzp либо равным значению электромагнитного момента Mz, либо, если требуемое значение электромагнитного момента Mz превышает Mzmax, равным Mzmax, причем знаки Mz и Mzp совпадают, далее, если измеренная частота вращения ротора ω меньше
задают значение реализуемого электромагнитного момента Mzp либо равным значению электромагнитного момента Mz, либо, если требуемое значение электромагнитного момента Mz превышает Mzmax, равным Mzmax, причем знаки Mz и Mzp совпадают, далее, если измеренная частота вращения ротора ω меньше  , а также в случае, если измеренная частота вращения ротора ω не меньше
, а также в случае, если измеренная частота вращения ротора ω не меньше  , но величина реализуемого электромагнитного момента Mzp меньше значения электромагнитного момента, рассчитанного по формуле
, но величина реализуемого электромагнитного момента Mzp меньше значения электромагнитного момента, рассчитанного по формуле  при условии ωs=ωs oпт, требуемые значения амплитуды A напряжения питания обмоток статора определяют из выражения
при условии ωs=ωs oпт, требуемые значения амплитуды A напряжения питания обмоток статора определяют из выражения  при значении частоты скольжения ωs=ωs oпт, взятой со знаком, соответствующим знаку заданного электромагнитного момента Mz, а значение частоты напряжения питания обмоток статора ω0 определяют как сумму величины измеренной частоты вращения ротора ω и определенной величины частоты оптимального скольжения ωs oпт, взятой со знаком, соответствующим знаку заданного электромагнитного момента Mz; если измеренная частота вращения ротора ω не
при значении частоты скольжения ωs=ωs oпт, взятой со знаком, соответствующим знаку заданного электромагнитного момента Mz, а значение частоты напряжения питания обмоток статора ω0 определяют как сумму величины измеренной частоты вращения ротора ω и определенной величины частоты оптимального скольжения ωs oпт, взятой со знаком, соответствующим знаку заданного электромагнитного момента Mz; если измеренная частота вращения ротора ω не  , а величина реализуемого электромагнитного момента Mzp не меньше значения электромагнитного момента, рассчитанного по формуле
, а величина реализуемого электромагнитного момента Mzp не меньше значения электромагнитного момента, рассчитанного по формуле  при условии ωs=ωs oпт, но не больше значения электромагнитного момента, рассчитанного по той же формуле при условии ωs=ωs крит, требуемое значение амплитуды A напряжения питания обмоток статора определяют как равное максимально допустимому значению напряжения U0 силового преобразователя, а значение его частоты ω0 - как сумму величины измеренной частоты вращения ротора ω и определенной величины частоты оптимального скольжения ωs oпт, взятой со знаком, соответствующим знаку заданного электромагнитного момента Mz, и умноженной на коэффициент пропорциональности, равный
при условии ωs=ωs oпт, но не больше значения электромагнитного момента, рассчитанного по той же формуле при условии ωs=ωs крит, требуемое значение амплитуды A напряжения питания обмоток статора определяют как равное максимально допустимому значению напряжения U0 силового преобразователя, а значение его частоты ω0 - как сумму величины измеренной частоты вращения ротора ω и определенной величины частоты оптимального скольжения ωs oпт, взятой со знаком, соответствующим знаку заданного электромагнитного момента Mz, и умноженной на коэффициент пропорциональности, равный  ; если измеренная частота вращения ротора ω не меньше
; если измеренная частота вращения ротора ω не меньше  , а величина реализуемого электромагнитного момента Mzp больше значения электромагнитного момента, рассчитанного по формуле
, а величина реализуемого электромагнитного момента Mzp больше значения электромагнитного момента, рассчитанного по формуле  при условии ωs=ωs oпт, и больше значения электромагнитного момента, рассчитанного по той же формуле при условии ωs=ωs крит, требуемое значение амплитуды A напряжения питания обмоток статора определяют как равное максимально допустимому значению напряжения U0 силового преобразователя, а значение его частоты ω0 - как сумму величины измеренной частоты вращения ротора ω и определенной величины частоты оптимального скольжения ωs oпт, взятой со знаком, соответствующим знаку заданного электромагнитного момента Mz, и умноженной на коэффициент пропорциональности, равный
при условии ωs=ωs oпт, и больше значения электромагнитного момента, рассчитанного по той же формуле при условии ωs=ωs крит, требуемое значение амплитуды A напряжения питания обмоток статора определяют как равное максимально допустимому значению напряжения U0 силового преобразователя, а значение его частоты ω0 - как сумму величины измеренной частоты вращения ротора ω и определенной величины частоты оптимального скольжения ωs oпт, взятой со знаком, соответствующим знаку заданного электромагнитного момента Mz, и умноженной на коэффициент пропорциональности, равный  , формируют с помощью силового преобразователя напряжение питания обмоток статора асинхронного двигателя с определенной выше амплитудой и частотой, где Ls, Lr и Lh - индуктивности обмоток статора, ротора и их взаимоиндуктивность, Rs и Rr - активные сопротивления статора и ротора, соответственно.
, формируют с помощью силового преобразователя напряжение питания обмоток статора асинхронного двигателя с определенной выше амплитудой и частотой, где Ls, Lr и Lh - индуктивности обмоток статора, ротора и их взаимоиндуктивность, Rs и Rr - активные сопротивления статора и ротора, соответственно.
Отличием предлагаемого способа от существующих является то, что частота скольжения при частотном управлении не является постоянной или изменяющейся пропорционально электромагнитному моменту, а изменяется таким образом, чтобы обеспечить минимальные потери в двигателе, или условный минимум потерь при данных уровнях ограничения напряжения и тока, или максимально реализуемый электромагнитный момент, если заданный момент не реализуем при данных уровнях ограничения напряжения и тока.
В частности, величина частоты скольжения ωs в каждый момент времени пропорциональна оптимальной частоте скольжения ωs oпт. Оптимальная частота скольжения при этом умножается на некоторый коэффициент пропорциональности k, причем учитывается знак задаваемого электромагнитного момента sign(Mz) (двигательный или генераторный). Таким образом, частота скольжения в каждый момент времени устанавливается равной

Способ оптимального частотного управления асинхронным двигателем поясняется фиг.1, где приведен пример устройства, реализующего способ. В данном случае приводится пример транспортного средства (автомобиля, трактора и т.п.) с электрической трансмиссией переменно-переменного тока.
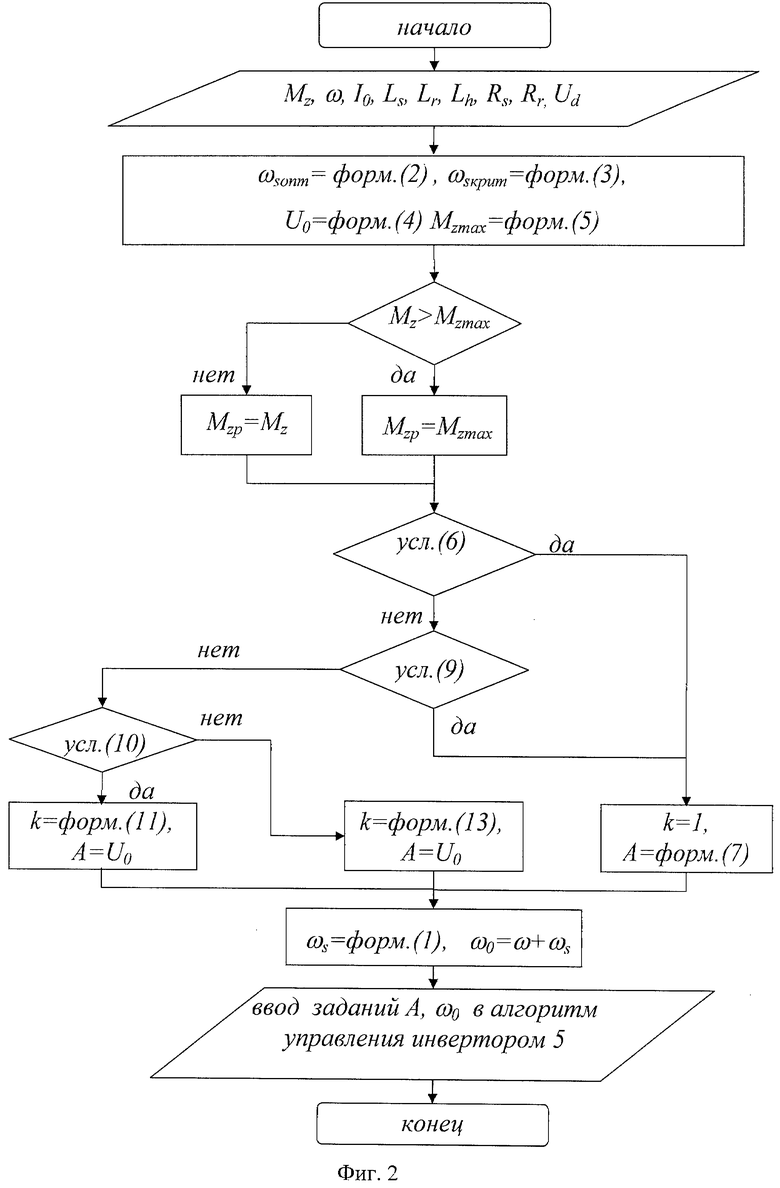
Блок-схема алгоритма вычисления требуемых параметров работы устройства представлена на фиг.2.
Двигатель внутреннего сгорания 1 приводит во вращение генератор переменного тока 2, который выдает переменное трехфазное напряжение на вход выпрямителя 3 силового преобразователя.
Выход выпрямителя 3 и вход инвертора 5 силового преобразователя образуют звено постоянного тока силового преобразователя, на котором установлен датчик напряжения 4, осуществляющий измерение мгновенного значения напряжения звена постоянного тока (Ud). В соответствии с Ud по известным соотношениям задается величина максимально допустимого значения выходного напряжения инвертора U0. Так, при широтно-импульсной модуляции выходного напряжения силового преобразователя, допустимая амплитуда синусоидального линейного напряжения U0 не может превышать  (см. Розанов Ю.К., Рябчицкий М.В., Кваснюк А.А. Силовая электроника. Учебник. - М.: Издательский дом МЭИ, 2007, 632 с., с.409).
(см. Розанов Ю.К., Рябчицкий М.В., Кваснюк А.А. Силовая электроника. Учебник. - М.: Издательский дом МЭИ, 2007, 632 с., с.409).
К выходу инвертора 5 подключен тяговый асинхронный двигатель 6, на одном валу с которым установлен датчик скорости вращения 7, сигнал которого, пропорциональный скорости вращения ротора двигателя n [об/мин], усиливается усилителем 8, преобразуется аналого-цифровым преобразователем 9 и умножается на коэффициент  в блоке коэффициента 10, где p - число пар полюсов статора асинхронного двигателя. В результате на выходе блока 10 получается значение мгновенной круговой частоты ω [с-1] вращения ротора асинхронного двигателя 6.
в блоке коэффициента 10, где p - число пар полюсов статора асинхронного двигателя. В результате на выходе блока 10 получается значение мгновенной круговой частоты ω [с-1] вращения ротора асинхронного двигателя 6.
Требуемый электромагнитный момент Mz тягового асинхронного двигателя 6 задается педалью «газ» 11, установленной в кабине водителя транспортного средства, и передается через усилитель 12 и аналого-цифровой преобразователь 13.
Максимально допустимое значение выходного тока I0 инвертора 5, а также параметры схемы замещения тягового асинхронного двигателя Rr, Rs, Lr, Ls, Lh вводятся посредством ПЭВМ 14 в контроллер 15. Значения параметров Ls, Lr, Lh, Rs, Rr берутся по данным схемы замещения фазы асинхронного двигателя (см., например, Булгаков А.А. Частотное управление асинхронными двигателями. М.: Энергоиздат, 1982, 216 с., с.51-78) или могут быть получены экспериментально (см., например, Виноградов А.Б. Векторное управление электроприводами переменного тока. Учебное пособие. - Иваново: ГОУВПО «Ивановский государственный энергетический университет им. В.И.Ленина», 2008, 298 с., с.220-230).
В контроллер 15 также поступают задание требуемого момента Mz тягового двигателя 6 и измеренные мгновенные значения напряжения Ud и частоты ω. В контроллере 15 реализован алгоритм формирования амплитуды A и частоты ω0 напряжения питания обмоток статора асинхронного двигателя 6, представленный на фиг.2.
В контроллере 15 определяется частота оптимального и критического скольжения. Значение оптимального скольжения ωs oпт может определяться по значениям сопротивлений и индуктивностей, например, по формуле

где указано значение абсолютного скольжения, оптимального по потреблению тока статора. Формула (2) определяет значение скольжения, совпадающее с законом регулирования М.П.Костенко (см., например, Л.М.Пиотровский. Электрические машины. - М.-Л.: Госэнергоиздат, 1949, 528 с., с.408). Возможно также задание величины оптимального скольжения по результатам экспериментальных исследований, в функции электромагнитного момента, скорости и т.д. (см., например, Шрейнер Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. Екатеринбург: УРО РАН, 2000, 654 с., с.544-547).
Значение критического скольжения определяется по формуле:
Определяют максимально допустимое выходное напряжение силового преобразователя, питающего двигатель. Например, если необходимо обеспечить синусоидальность выходного напряжения питания силового преобразователя с широтно-импульсной модуляцией, максимально допустимое выходное линейное напряжение определяют по формуле (4)
По формуле (5) определяют величину максимального электромагнитного момента Mzmax, которой ограничивают возможное задание реализуемого электромагнитного момента Mzp по заданному значению максимального тока I0. Таким образом, если задание электромагнитного момента превышает полученное значение, то Mzp принимают равным Mzmax. Знаки Мz и Mzp совпадают.
В случае, если выполняется условие
ресурсов силового преобразователя достаточно, чтобы реализовать режим работы двигателя с минимальными потерями и при этом достичь реализуемого значения электромагнитного момента Mzp, причем ограничения по напряжению и току на выходе силового преобразователя, с учетом (5), не достигаются. Поскольку минимальные потери в асинхронном двигателе имеют место при оптимальном скольжении, то, исходя из (1), принимают k=1. Тогда ωs=sign(Mz)·ωs oпт, а величина напряжения питания двигателя определяется исходя из реализуемого электромагнитного момента Mzp по формуле:

где:
A - амплитуда напряжения, В;
ω - измеренная частота вращения, рад/с;
ωs - частота скольжения, рад/с.
В случае, если условие (6) не выполняется, для расчета электромагнитного момента используется соотношение:

При этом возможны следующие три случая.
Случай 1. Величина момента М, вычисляемого по соотношению (8) при условии, что ωs=ωs oпт, больше, чем величина требуемого момента Mzp.

В этом случае инвертор 5 может обеспечить работу асинхронного двигателя 6 с реализуемым моментом Mzp при минимальных потерях (с оптимальным скольжением), но при ограничении выходного тока силового преобразователя на уровне не более I0. Принимается k=1, что соответствует ωs=sign(Mz)·ωs oпт, и для расчета требуемой амплитуды напряжения используется соотношение (7). Очевидно, что амплитуда напряжения на выходе силового преобразователя будет меньше максимальной U0. Реализуется режим работы асинхронного двигателя с минимальными потерями (оптимальным скольжением) при электромагнитном моменте M=Mzp.
Случай 2. Величина момента М, вычисляемого по соотношению (8) при ωs=ωs крит, меньше, чем величина реализуемого момента Mzp.

Выполнение условия (10) означает, что при заданных ограничениях тока и напряжения силового преобразователя невозможно получить реализуемый электромагнитный момент Mzp даже при критическом скольжении. Следовательно, задается момент, максимально достижимый при имеющихся ограничениях напряжения и тока на выходе силового преобразователя U0 и I0. Тогда принимается

а частота скольжения принимает значение

Амплитуда напряжения на выходе силового преобразователя принимается максимальной и равной U0, достигаемый момент определяется в соответствии с (8).
Случай 3. В противном случае (т.е. если ни (9), ни (10) не выполнены) реализуемый момент невозможно обеспечить в режиме минимальных потерь (при оптимальном скольжении), но этот момент можно получить несколько увеличив скольжение (не более критического). В этом случае амплитуда напряжения задается максимальной и равной U0, а соотношение (8) используется для расчета требуемой величины коэффициента k при M=Mzp.
Для упрощения решения (8) относительно ωs используется предположение, что при больших частотах вращения, характерных для тягового привода при регулировании во второй зоне при ограниченном напряжении питания двигателя, частота скольжения и зависимые от нее слагаемые в знаменателе (8) пренебрежимо малы: ω>>ωs (ωs→0); также пренебрежимо мало сопротивление статора и зависимые от него слагаемые в знаменателе (8): Rs→0. Тогда, с учетом (2), коэффициент k равен:

В случае, если ωs oпт задается не по (2), а иначе, решение (8) относительно k находится аналогично. Частота скольжения определяется по (1) с учетом (13).
Задание частоты напряжения ω0 силового преобразователя определяется как сумма измеренной частоты вращения ротора и частоты скольжения по следующей формуле:

Сигналы, пропорциональные определенным в контроллере 15 мгновенным значением A и ω0, подаются на вход контроллера 16 инвертора, который формирует на выходе задающие сигналы мгновенных выходных напряжений uА, uB, uC, поступающие на вход драйвера 17 силовых ключей инвертора. Драйвер управляет силовыми ключами инвертора, коммутируя их таким образом, что на выходе инвертора (на обмотках статора асинхронного двигателя) формируется трехфазное напряжение заданной амплитуды А и частоты ω0.
Предлагаемый способ позволяет реализовать большой диапазон изменения величины магнитного поля и обеспечить малый уровень потерь в асинхронном двигателе в широком диапазоне частот вращения и моментов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПТИМАЛЬНОГО ВЕКТОРНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402147C1 |
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2016 |
|
RU2626325C1 |
| СПОСОБ ФАЗОВОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2398349C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Способ управления током асинхронного двигателя при питании от автономного инвертора напряжения | 2018 |
|
RU2679831C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ТЯГОВЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1995 |
|
RU2123757C1 |
| МОМЕНТНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2000 |
|
RU2163414C1 |
| МОМЕНТНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2000 |
|
RU2192705C2 |
| МОМЕНТНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2465715C1 |
Изобретение относится к области электротехники и может быть использовано в электроприводе для регулирования асинхронных двигателей, в частности двигателей с короткозамкнутым ротором, в том числе тяговых. Техническим результатом является обеспечение максимального значения КПД двигателя и максимальных электромагнитных моментов в системах частотного управления асинхронными двигателями с учетом ограничения тока и напряжения силового преобразователя, питающего двигатель. В способе оптимального частотного управления асинхронный двигатель с короткозамкнутым ротором питается от источника регулируемого напряжения, например автономного инвертора напряжения, циклоконвертора и т.п. В способе частотного управления асинхронным двигателем с короткозамкнутым ротором, питаемым от силового преобразователя, величина частоты скольжения ωs в каждый момент времени пропорциональна оптимальной частоте скольжения ωs oпт. Оптимальная частота скольжения при этом умножается на некоторый коэффициент пропорциональности k, причем учитывается знак задаваемого электромагнитного момента sign(Mz) (двигательный или генераторный). Таким образом, частота скольжения в каждый момент времени устанавливается равной ωs=sign(Mz)·k·ωs oпт, где Mz - задаваемый электромагнитный момент. 2 ил.
Способ управления асинхронным двигателем с короткозамкнутым ротором, питаемым от силового преобразователя, заключающийся в том, что задают максимально допустимое значения тока I0 на выходе силового преобразователя, в каждый момент времени задают требуемое значение электромагнитного момента Mz, измеряют круговую частоту вращения ротора асинхронного двигателя ω и напряжение Ud звена постоянного тока силового преобразователя, питающего двигатель, определяют значения круговой частоты оптимального скольжения ωonm, круговой частоты критического скольжения из  максимально допустимого напряжения на выходе силового преобразователя из выражения
максимально допустимого напряжения на выходе силового преобразователя из выражения  и максимального электромагнитного момента Mzmax, развиваемого асинхронным двигателем, из выражения
и максимального электромагнитного момента Mzmax, развиваемого асинхронным двигателем, из выражения  задают значение реализуемого электромагнитного момента Mzp, либо равным значению электромагнитного момента Mz, либо, если требуемое значение электромагнитного момента Mz превышает Mzmax, равным Mzmax, причем знаки Mz и Mzp совпадают, далее, если измеренная частота вращения ротора ω меньше
задают значение реализуемого электромагнитного момента Mzp, либо равным значению электромагнитного момента Mz, либо, если требуемое значение электромагнитного момента Mz превышает Mzmax, равным Mzmax, причем знаки Mz и Mzp совпадают, далее, если измеренная частота вращения ротора ω меньше  а также в случае, если измеренная частота вращения ротора ω не меньше
а также в случае, если измеренная частота вращения ротора ω не меньше  но величина реализуемого электромагнитного момента Mzp меньше значения электромагнитного момента, рассчитанного по формуле
но величина реализуемого электромагнитного момента Mzp меньше значения электромагнитного момента, рассчитанного по формуле
при условии ωs=ωsonm, требуемые значение амплитуды А напряжения питания обмоток статора определяют из выражения

при значении частоты скольжения ωs=ωs опт, взятой со знаком, соответствующим знаку заданного электромагнитного момента Mz, а значение частоты напряжения питания обмоток статора ω0 определяют, как сумму величины измеренной частоты вращения ротора ω и определенной величины частоты оптимального скольжения ωs опт взятой со знаком, соответствующим знаку заданного электромагнитного момента Mz; если измеренная частота вращения ротора ω не меньше  а величина реализуемого электромагнитного момента Mzp не меньше значения электромагнитного момента, рассчитанного по формуле
а величина реализуемого электромагнитного момента Mzp не меньше значения электромагнитного момента, рассчитанного по формуле

при условии ωs=ωs опт, но не больше значения электромагнитного момента, рассчитанного по той же формуле при условии ωs=ωs крит, требуемое значение амплитуды А напряжения питания обмоток статора определяют, как равное максимально допустимому значения напряжения U0 силового преобразователя, а значение его частоты ω0 - как сумму величины измеренной частоты вращения ротора ω и определенной величины частоты оптимального скольжения ωs опт взятой со знаком, соответствующим знаку заданного электромагнитного момента Mz, и умноженной на коэффициент пропорциональности, равный  если измеренная частота вращения ротора ω не меньше
если измеренная частота вращения ротора ω не меньше  а величина реализуемого электромагнитного момента Mzp больше значения электромагнитного момента, рассчитанного по формуле
а величина реализуемого электромагнитного момента Mzp больше значения электромагнитного момента, рассчитанного по формуле

при условии ωs=ωs опт, и больше значения электромагнитного момента, рассчитанного по той же формуле при условии ωs=ωs крит, требуемые значение амплитуды А напряжения питания обмоток статора определяют, как равное максимально допустимому значению напряжения U0 силового преобразователя, а значение его частоты ω0 - как сумму величины измеренной частоты вращения ротора ω и определенной величины частоты оптимального скольжения ωs опт, взятой со знаком, соответствующим знаку заданного электромагнитного момента Mz, и умноженной на коэффициент пропорциональности, равный  формируют с помощью силового преобразователя напряжение питания обмоток статора асинхронного двигателя с определенной выше амплитудой и частотой, где Ls, Lr и Lh - индуктивности обмоток статора, ротора и их взаимоиндуктивность, Rs и Rr - активные сопротивления статора и ротора соответственно.
формируют с помощью силового преобразователя напряжение питания обмоток статора асинхронного двигателя с определенной выше амплитудой и частотой, где Ls, Lr и Lh - индуктивности обмоток статора, ротора и их взаимоиндуктивность, Rs и Rr - активные сопротивления статора и ротора соответственно.
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2294050C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ | 2007 |
|
RU2339154C1 |
| СПОСОБ ПЕРЕРАБОТКИ СТРУЖКИ ОСОБОЧИСТЫХ АЛЮМИНИЕВЫХ СПЛАВОВ | 2006 |
|
RU2323984C2 |
| US 5231339 А, 27.07.1993 | |||
| JP 7067399 A, 10.03.1995 | |||
| Устройство для воспроизведения сигналов о быстроменяющихся случайных процессах с носителя магнитной записи | 1981 |
|
SU980135A1 |

