Изобретение относится к электротехнике и может быть использовано при осуществлении запуска электроприводов скребковых, ленточных конвейеров и других машин с электроприводами на базе асинхронных электродвигателей.
Общеизвестен способ прямого пуска асинхронного электродвигателя (АД), согласно которому на обмотки статора подается полное напряжение питающей сети. (Копылов И.П. Математическое моделирование электрических машин. - М.: Высш. шк., 2001. - 327 с.).
Его недостатком является появление во время пуска значительных по величине пульсаций электромагнитного момента и токов электродвигателя, приводящих к возникновению динамических усилий в элементах конструкции самого электродвигателя, а также в механических передаточных устройствах электроприводов (Фиг. 1).
С целью снижения негативных воздействий прямого пуска асинхронного электродвигателя на электрическую и механические составляющие электропривода используют устройства плавного пуска или soft starter. Существует значительное разнообразие схем устройств плавного пуска, доминирующая идеология которых строится на основе использования в цепи питающего напряжения полупроводниковых регуляторов напряжения, выполненных, как правило, на основе силовых полупроводниковых ключей (тиристоров, транзисторов и т.д.). Подавая управляющий сигнал на силовой полупроводниковый ключ, подают питающее напряжение на статорные обмотки асинхронного электродвигателя. Прекращая подачу управляющего сигнала, либо подачей другого сигнала (в зависимости от конструкции силового полупроводникового ключа) прекращают подачу напряжения на статорные обмотки асинхронного электродвигателя. Изменяя промежуток закрытого и открытого состояния ключа, добиваются плавного изменения действующего значения напряжения (Ковчин С.А., Сабинин Ю.А. Теория электропривода: Учеб. для вузов. - СПб.: Энергоатомиздат, 2000. - 496 с). В большинстве случаев зависимость изменения амплитудного значения питающего напряжения от времени пуска является линейной либо экспоненциальной (во втором случае это связано с тем, что устройством, задающим интенсивность нарастания питающего напряжения, является конденсатор)
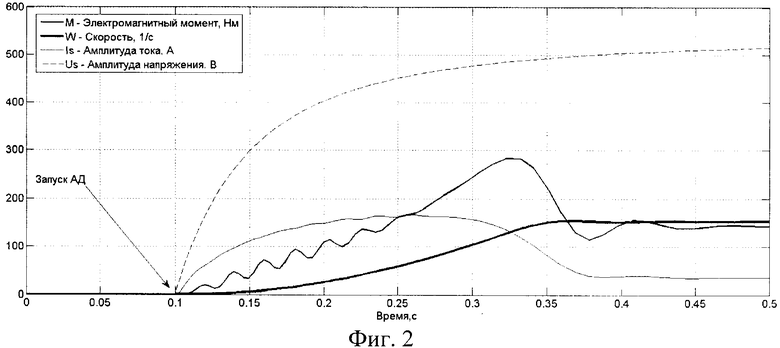
К недостаткам этого способа относятся все еще остающиеся пульсации электромагнитного момента (фиг. 2), хотя и значительно уменьшившие амплитуду колебаний по сравнению с прямым пуском асинхронного электродвигателя (фиг. 1), но в то же время значительно увеличившиеся по продолжительности.
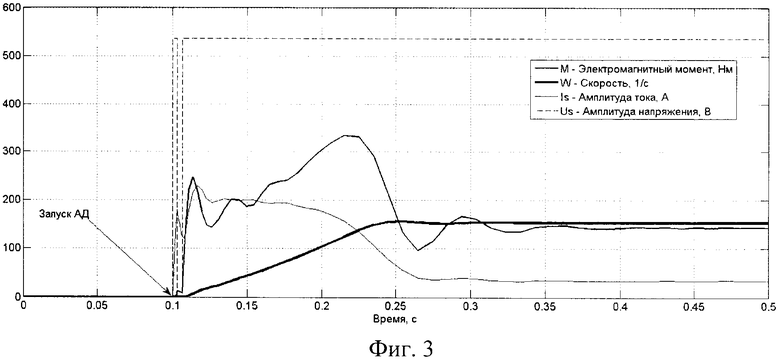
Наиболее близким по технической сущности к заявляемому является способ пуска асинхронного электродвигателя, согласно которому, первоначально на статорные обмотки электродвигателя подают напряжение с амплитудой, равной амплитуде напряжения сети, а затем последовательно во времени, через определенный промежуток времени от начала подачи напряжения, равный π/3 эл. град., (при частоте сети 50 Гц - 0.0033 с.), электродвигатель отключают от питающей сети и переводят в режим динамического торможения на такое же время, π/3 эл. град., (при частоте сети 50 Гц - 0.0033 с.), после чего на обмотки статора вновь подают напряжение с амплитудой, равной амплитуде напряжения сети (фиг. 3) (патент РФ №2235410, МПК Н02Р 1/26, опубл. 27.08.2004).
Указанный способ пуска позволяет практически исключить колебания в электрической и механической частях электропривода, построенного на базе асинхронного электродвигателя, и при этом не увеличивая продолжительность пуска асинхронного электродвигателя.
К его недостаткам относится возникновение в процессе пуска в фазе включения динамического торможения значительных перенапряжений, поскольку фактически возникает короткое замыкание статорных обмоток, что негативным образом сказывается на характеристиках надежности полупроводниковых ключей, формирующих режим включения-отключения питающего напряжения статорной цепи.
Технический результат заключается в снижении пульсаций электромагнитного момента и токов электродвигателя при его пуске при условии ограничения динамических перенапряжений на полупроводниковых ключах, коммутирующих подачу напряжения на статорные обмотки в замкнутую электрическую цепь.
Указанный технический результат достигается тем, что в способе пуска асинхронного электродвигателя, включающем изменение активного сопротивления статорных обмоток и, как следствие, изменение питающего напряжения статорных обмоток, согласно изобретению значение активного сопротивления, включенного последовательно в цепь статорной обмотки, формируется в соответствии целевой функции электромагнитного момента в форме статической механической характеристики и вычисляется по следующей формуле:
где Rs - активное сопротивление обмоток статора;
p - число пар полюсов;
Usu, Usv - составляющие по осям u и v вектора напряжения на обмотках статора;
Ψsu, Ψsv - составляющие по осям u и v вектора потокосцепления статора;
Ψ2 s - квадрат амплитудного значения вектора потокосцепления статора;
ωn - скорость вращения системы координат;
М - значения электромагнитного момента;
Mn - желательное значение электромагнитного момента, вычисляемого по уточненной формуле Клосса.
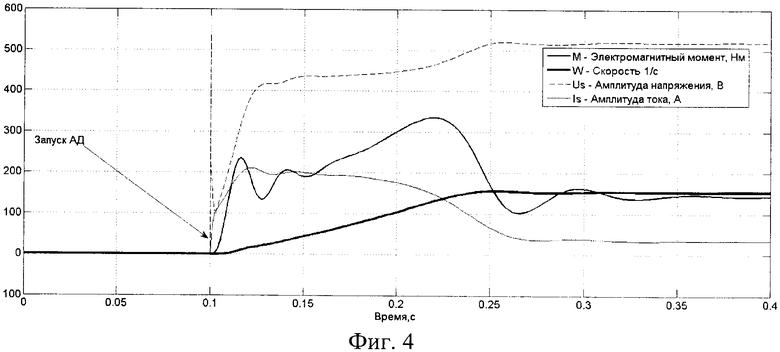
При этом напряжение непосредственно на обмотках статорной цепи будет меняться согласно фиг. 4, а динамические характеристики пуска асинхронного электродвигателя показывают наилучшее качество по параметрам амплитуды и продолжительности колебаний.
Целевой функцией, задающей значение динамического электромагнитного момента Mn, следует принять величину, рассчитанную по уточненной формуле Клосса (Копылов И.П. Математическое моделирование электрических машин. - М.: Высш. шк., 2001. - 327 с.).
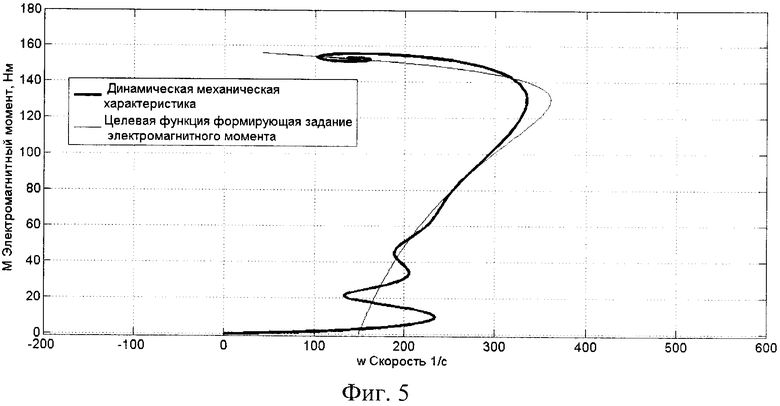
Заявляемое изобретение поясняется чертежами, где на фиг. 1 показан пуск прямым включением в сеть; на фиг. 2 показан процесс пуска с помощью полупроводникового регулятора напряжения (soft starter); на фиг. 3 показан пуск по способу последовательных коммутаций через π/3 эл. град., (при частоте сети 50 Гц - 0.0033 с) с режимом кратковременного динамического торможения; на фиг. 4 показаны основные характеристики процесса пуска асинхронного электродвигателя с помощью заявляемого способа; на фиг. 5 показаны задающая функция, определяющая формирование электромагнитного момента в соответствии с угловой скоростью вращения ротора (имеющая вид статической механической характеристики), и динамическая механическая характеристика, показывающая значение электромагнитного момента, соответствующего угловой скорости вращения ротора, сформированной в результате управляемого пуска заявляемым способом.
Конструкции асинхронных электродвигателей проектируют таким образом, чтобы обеспечить достаточный пусковой момент и максимально снизить при этом значение пускового тока. Для этого конструкции обмоток роторов асинхронных электродвигателей изготовляют специальной конфигурации (глубокопазный, двухклеточный). Несмотря на эти конструктивные разработки, пусковой ток остается довольно большим. Существенным недостатком также является значительная величина амплитуды периодической составляющей электромагнитного момента. На фиг. показаны диаграммы, характеризующие пуск асинхронного электродвигателя прямым включением в сеть. При использовании полупроводниковых регуляторов напряжения удается существенно снизить амплитуду периодической составляющей электромагнитного момента, фиг. 2, но при этом продолжительность колебаний электромагнитного момента по-прежнему остается достаточно высокой, что особенно негативно влияет на механическую часть асинхронного электродвигателя и редуктора в процессе затянувшегося тяжелого пуска под значительной нагрузкой. Колебательный процесс изначально присутствует в асинхронном электромеханическом преобразователе, как результат взаимодействия векторов потокосцепления статора и ротора. Для эффективного универсального решения интегрального сокращения колебаний системы необходимо в процессе пуска смещать векторы потокосцеплений, и способ пуска последовательных коммутаций через π/3 эл. град., (при частоте сети 50 Гц - 0.0033 с) с режимом кратковременного динамического торможения успешно решает эту задачу (фиг. 3). Однако перевод электромеханического преобразователя в режим электродинамического торможения по сути формирует режим кратковременного короткого замыкания, что крайне негативно отражается на надежности полупроводниковых ключей, формирующих режим включения-отключения питающего напряжения статорной цепи.
На фиг. 4 изображен процесс пуска асинхронного электродвигателя заявляемым способом.
Чтобы получить представление о процессе запуска электродвигателя, рассмотрим его как задачу управления состоянием асинхронного двигателя с целью обеспечения максимальной близости во время пуска динамической и статической механических характеристик с учетом возможности активного влияния на процесс изменением величины суммарного активного сопротивления в цепи статора (Rs).
Если воспользоваться широко известным описанием состояния асинхронного электродвигателя
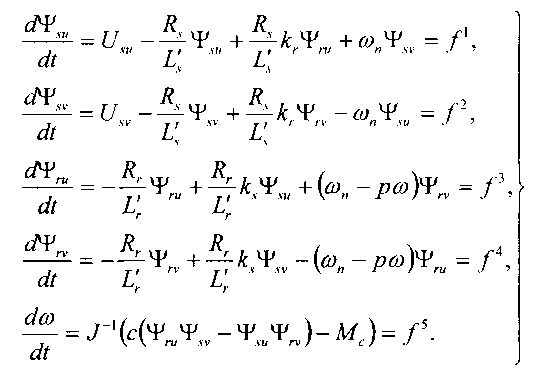
по (Ковач К., Рац И. Переходные процессы в машинах переменного тока. - М. - Л.: Госэнергоиздат, 1963. - 744 с.), аргументом или возмущающим воздействием следует считать угловую скорость вращения ротора (7). Параметры, начинающиеся с R и индексами s, r - активные сопротивления обмоток статоров и роторов АД, 

Сформулируем задачу управления асинхронным электродвигателем как задачу минимизации некоторого функционала, записанного в интегральной форме и выражающего цель управления:
где Mn, Μ - необходимое и текущее значения электромагнитного момента АД.
Необходимое значение электромагнитного момента можно задавать, например, выражением, определяющим естественную механическую характеристику асинхронного электродвигателя по уточненной формуле Клосса.
Условие введения управления со стороны статора требует или наличия в подынтегральной функции информации о состоянии статора, или присутствия управлений, или того и другого вместе. В противном случае следует ожидать аналитической неразрешимости задачи.
Решение можно получить на основе достаточных условий абсолютного минимума Кротова (Кротов В.Ф. Методы и задачи оптимального управления [Текст]: / В.Ф. Кротов, В.И. Гурман // - М.: Наука, 1973. - 446 с.).
Учитывая, что задача оптимального управления считается математически решенной до конца, если управление оказывается найденным в функции параметров состояния объекта (Понтрягин Л.С. Математическая теория оптимальных процессов [Текст]: /Л.С.Понтрягин, В.Г. Болтянский, Р.В. Гамкрелидзе, Е.Ф. Мищенко // -4-е изд. - М.: Наука, 1983. - 392 с), получаем способ формирования суммарной величины активного сопротивления статорной цепи асинхронного электродвигателя при пуске
где Rs - активное сопротивление обмоток статора;
p - число пар полюсов;
Usu, Usv - составляющие по осям u и v вектора напряжения на обмотках статора;
Ψsu, Ψsv - составляющие по осям u и v вектора потокосцепления статора;
Ψ2 s - квадрат амплитудного значения вектора потокосцепления статора;
ωn - скорость вращения системы координат;
М - значения электромагнитного момента;
Mn - желательное значение электромагнитного момента, вычисляемого по уточненной формуле Клосса (фиг. 5).
Таким образом, формируя вышеуказанным способом значение активного сопротивления в процессе пуска, можно получить результат, приведенный на фиг.4 на примере электродвигателя типа ВРП160М4.
Способ пуска асинхронного электродвигателя реализуют следующим образом: в статорные обмотки электродвигателя включают активное сопротивление, значение которого можно изменять, последовательно включая или отключая полупроводниковыми ключами сегменты активного сопротивления в соответствии с формулой
Заявляемый способ пуска асинхронного двигателя позволяет:
- улучшить эксплуатационные характеристики электродвигателя и электропривода в целом;
- повысить КПД электродвигателя;
- повысить надежность электродвигателя;
- уменьшить динамические нагрузки на механическое передаточное устройство;
- ограничить перенапряжения на полупроводниковых ключах осуществляющих коммутацию статорной цепи.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2011 |
|
RU2476982C1 |
| СПОСОБ ПУСКА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2003 |
|
RU2235410C1 |
| Электропривод | 1985 |
|
SU1309244A1 |
| Способ импульсного регулирования частоты вращения асинхронного электропривода | 1982 |
|
SU1072227A1 |
| Электропривод | 1985 |
|
SU1312712A1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕЛИЧИНОЙ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2008 |
|
RU2395157C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ПЕРЕМЕННОГО ТОКА | 2021 |
|
RU2775819C1 |
| Способ управления асинхронным электроприводом | 1988 |
|
SU1628175A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ И МАГНИТНЫМ ПОТОКОМ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 2011 |
|
RU2469459C1 |
| РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД С ПОВЫШЕННЫМИ ХАРАКТЕРИСТИКАМИ НАДЕЖНОСТИ | 2012 |
|
RU2488216C1 |
Изобретение относится к области электротехники и может быть использовано при запуске электроприводов скребковых, ленточных конвейеров и других машин с электроприводами на базе асинхронных электродвигателей. Техническим результатом является снижение пульсаций электромагнитного момента и токов электродвигателя при его пуске при условии ограничения динамических перенапряжений на полупроводниковых ключах, коммутирующих подачу напряжения на статорные обмотки в замкнутую электрическую цепь. Способ пуска асинхронного электродвигателя заключается в том, что на статорные обмотки электродвигателя питающее напряжение подают через дополнительное активное сопротивление, значение которого формируется согласно закону
где Rs - активное сопротивление обмоток статора; p - число пар полюсов; Usu, Usv - составляющие по осям u и v вектора напряжения на обмотках статора; Ψsu, Ψsv - составляющие по осям u и v вектора потокосцепления статора; ωn - скорость вращения системы координат; Ψ2 s - квадрат амплитудного значения вектора потокосцепления статора; М - значения электромагнитного момента; Mn - желательное значение электромагнитного момента, вычисляемого по уточненной формуле Клосса. 5 ил.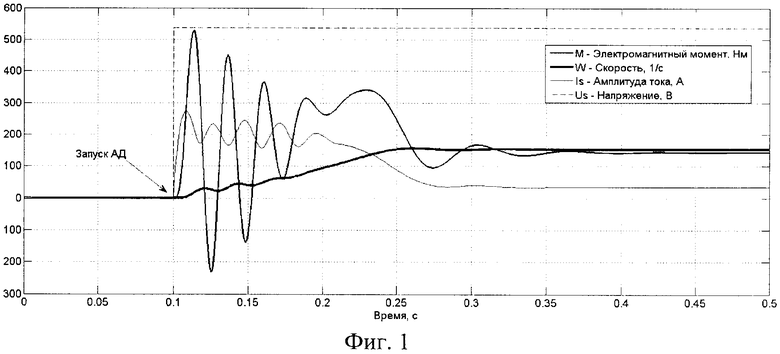
Способ пуска асинхронного электродвигателя, включающий изменение активного сопротивления статорных обмоток и, как следствие, изменение питающего напряжения статорных обмоток, отличающийся тем, что значение активного сопротивления, включенного последовательно в цепь статорной обмотки, формируется в соответствии с целевой функцией электромагнитного момента в форме статической механической характеристики и вычисляется по следующей формуле:
где Rs - активное сопротивление обмоток статора;
p - число пар полюсов;
Usu, Usν - составляющие по осям u и ν вектора напряжения на обмотках статора;
Ψsu, Ψsν - составляющие по осям u и ν вектора потокосцепления статора;
Ψ2 s - квадрат амплитудного значения вектора потокосцепления статора;
ωn - скорость вращения системы координат;
M - значения электромагнитного момента;
Mn - желательное значение электромагнитного момента, вычисляемого по уточненной формуле Клосса.
| СПОСОБ ПУСКА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2003 |
|
RU2235410C1 |
| СПОСОБ ПЛАВНОГО ПУСКА АСИНХРОННОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2012 |
|
RU2497267C1 |
| JP 2008187763 A, 14.08.2008 | |||
| АНТИТЕЛА, СПЕЦИФИЧНЫЕ К CD47 и PD-L1 | 2020 |
|
RU2779652C2 |
| Ледорезная машина | 1960 |
|
SU135496A1 |
| KR 20110008666 A, 27.01.2011 | |||
| US 6380708 B1, 30.04.2002 | |||
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "ЯЗЫК С КРАСНЫМ ОСНОВНЫМ СОУСОМ" | 2013 |
|
RU2507905C1 |
| WO 8404005 A1, 11.10.1984. | |||

