Изобретение относится к области радиоэлектроники и может быть использовано при обнаружении полезных сигналов с неизвестной фазовой или временной задержкой в условиях действия аддитивных узкополосных негауссовых помех при любом соотношении мощностей полезного сигнала и помехи, когда распределения мгновенных значений огибающей помехи неизвестны или меняются во времени, а вероятность ложной тревоги должна поддерживаться на заданном уровне. При этом спектр помехи шире спектра сигнала настолько, что отсчёты помехи можно считать независимыми.
Известен способ обнаружения полезных сигналов при действии аддитивных негауссовских узкополосных помех [1, Теория обнаружения сигналов / Под ред. П.А. Бакута, стр. 299, формулы 5.112 и 5.113], включающий выделение и дискретизацию огибающей  и фазы
и фазы  из узкополосного процесса
из узкополосного процесса  изменения тока или напряжения во времени с частотой
изменения тока или напряжения во времени с частотой  на выходе приёмного тракта в соответствии с теоремой Котельникова и получение последовательности дискретных отсчётов
на выходе приёмного тракта в соответствии с теоремой Котельникова и получение последовательности дискретных отсчётов  и
и  в моменты времени
в моменты времени  , где
, где  - номер отсчёта, которые далее запоминаются в памяти вычислительного устройства и используются затем для вычисления статистики обнаружения
- номер отсчёта, которые далее запоминаются в памяти вычислительного устройства и используются затем для вычисления статистики обнаружения

где  и
и  - отсчёты огибающих помехи и полезного сигнала соответственно;
- отсчёты огибающих помехи и полезного сигнала соответственно;  и
и  - отсчёты фаз помехи и полезного сигнала соответственно;
- отсчёты фаз помехи и полезного сигнала соответственно; - комплексная огибающая полезного сигнала;
- комплексная огибающая полезного сигнала;
- амплитудная характеристика нелинейного преобразования огибающей;  - плотность вероятности (ПВ) помехи.
- плотность вероятности (ПВ) помехи.
Далее статистика обнаружения сравнивается с заданным порогом. Если порог превышен, то принимают решение об обнаружении полезного сигнала на входе приёмного тракта, а если нет, то принимают решение об отсутствии полезного сигнала на входе.
Известный способ обнаружения является оптимальным и эффективным только при известной ПВ помехи, когда её мощность значительно больше мощности полезного сигнала.
Статистика (1) применима только для детерминированного сигнала. В ситуации, когда время появления полезного сигнала или фаза в момент появления неизвестны вместо статистики обнаружения (1) используют модуль отклика согласованного с полезным сигналом фильтра:

В реальной ситуации распределение значений помехи или её ПВ огибающей неизвестны, а помеха может вообще отсутствовать на входе. Заметим, также, что при наличии на входе смеси помехи и сигнала определить характеристики помехи не представляется возможным из-за наличия полезного сигнала.
Рассмотренный известный способ не учитывает реальные условия приёма сигнала и, как показывают эксперименты и моделирование, может существенно проигрывать в эффективности обнаружения по сравнению с обычной линейной корреляционной обработкой или согласованной фильтрацией.
Техническая проблема заключается в необходимости разработки универсального способа, позволяющего в режиме реального времени или с заданной не существенной задержкой максимально эффективно обнаруживать полезный сигнал в реальных условиях приёма, когда вероятностные характеристики огибающей помехи неизвестны или меняются во времени, при этом отношение сигнал-помеха может быть произвольным, в том числе и близким к нулю.
Для решения этой проблемы предлагается способ обнаружения полезного сигнала в узкополосной аддитивной смеси с помехой, который включает выделение огибающей и фазы узкополосного процесса изменения тока или напряжения во времени на выходе приёмного тракта, их дискретизацию в соответствии с теоремой Котельникова с получением последовательности дискретных отсчётов огибающей и фазы в равностоящие моменты времени, сохранение этих отсчётов в памяти вычислительного устройства, ранжирование последовательности сохранённых отсчётов огибающей и получение их вариационного ряда, сглаживание вариационного ряда монотонно возрастающей функцией от целочисленного аргумента - ранга и получение в результате сглаживания последовательности уникальных отсчётов сглаженной оценки вариационного ряда, оценивание производной от сглаживающей монотонной функции для каждого отсчёта последовательности рангов и получение в результате оценки производной последовательности отсчётов огибающей выходного колебания, фаза которого совпадает с фазой входного колебания, далее оценивание коэффициента передачи слабого сигнала при таком нелинейном преобразовании огибающей для каждого отсчёта последовательности рангов, изменение полярности отсчётов огибающей выходного колебания каждый раз при смене полярности отсчёта коэффициента передачи слабого сигнала, определение значения модуля функции ковариации между последовательностью отсчётов, полученной в результате такого нелинейного преобразования, и заданной последовательностью отсчётов полезного сигнала, причём вычисленное значение модуля функции ковариации далее сравнивают с заданным порогом обнаружения и в зависимости от результата сравнения принимают решение о наличии или отсутствии полезного сигнала на выходе приёмного тракта.
Техническим результатом изобретения является возможность поддерживать в реальных условиях приёма сигналов максимально возможными вероятности правильного принятия решений о наличии или отсутствии полезного сигнала в наблюдаемом процессе на входе приёмного тракта.
Покажем это. Пусть на вход поступает узкополосный процесс , представляющий аддитивную смесь сигнала  и помехи
и помехи  на несущей частоте :
на несущей частоте :

где и  огибающая и фаза узкополосного процесса соответственно, которые на интервале наблюдения
огибающая и фаза узкополосного процесса соответственно, которые на интервале наблюдения  могут быть представлены совокупностью дискретных отсчётов и
могут быть представлены совокупностью дискретных отсчётов и  в моменты времени , которые выбираются в соответствии с теоремой дискретизации Котельникова, где . Аналогично
в моменты времени , которые выбираются в соответствии с теоремой дискретизации Котельникова, где . Аналогично  и
и  .
.
Процесс после нелинейного преобразования узкополосной смеси (3) можно представить в виде 
Заметим, что для большинства приложений амплитудную характеристику  нелинейного преобразования считают нечётной. Поэтому процесс после нелинейного преобразования имеет дискретный спектр, составляющие которого сосредоточены на нечётных гармониках частоты . С учётом последующей узкополосной фильтрации в приёмном тракте на частоте далее используют составляющую только на первой гармонике , которая может быть определена как коэффициент ряда Фурье при первой гармонике
нелинейного преобразования считают нечётной. Поэтому процесс после нелинейного преобразования имеет дискретный спектр, составляющие которого сосредоточены на нечётных гармониках частоты . С учётом последующей узкополосной фильтрации в приёмном тракте на частоте далее используют составляющую только на первой гармонике , которая может быть определена как коэффициент ряда Фурье при первой гармонике

где

- амплитудная характеристика нелинейного преобразования (4) на первой гармонике частоты [1, Теория обнаружения сигналов / Под ред. П.А.Бакута, стр.299, формула 5.117].
Таким образом, нелинейное преобразование узкополосного процесса можно заменить эквивалентным нелинейным преобразованием на огибающей. При этом фаза узкополосного процесса не изменяется.
Для этого последовательность из  дискретных отсчётов и сохраняется в памяти вычислительного устройства.
дискретных отсчётов и сохраняется в памяти вычислительного устройства.
Далее отсчёты огибающей  сортируются в порядке возрастания от минимального значения
сортируются в порядке возрастания от минимального значения  до максимального
до максимального  с сохранением порядка следования отсчётов в последовательности. В результате такой сортировки получаем вариационный ряд
с сохранением порядка следования отсчётов в последовательности. В результате такой сортировки получаем вариационный ряд  , а также последовательность рангов
, а также последовательность рангов  , причём
, причём  .
.
Вариационный ряд  является дискретной оценкой функции
является дискретной оценкой функции  , которая обратна функции распределения
, которая обратна функции распределения  значений отсчётов огибающей.
значений отсчётов огибающей.
Функция обратная функции распределения связана с одномерной плотностью вероятности огибающей соотношением:

Здесь  Тогда
Тогда  , где - обратная функции распределения.
, где - обратная функции распределения.
Значение переменной  определяется на интервале
определяется на интервале  и в моменты времени равна значению
и в моменты времени равна значению  .
.
Далее вариационный ряд сглаживается монотонно возрастающей как минимум дважды дифференцируемой функцией  .
.
Очевидно, что отсчёты  не повторяются в отличие от отсчётов , то есть являются уникальными.
не повторяются в отличие от отсчётов , то есть являются уникальными.
Таким образом, мы получаем систему функций

удовлетворяющую условию ортогональности

Отсюда получаем ортонормированную систему функций

На базе этой системы ортонормированных функций любое нелинейное преобразование огибающей  можно представить в виде полинома:
можно представить в виде полинома:
Здесь  - вектор-строка параметров настройки нелинейного преобразования.
- вектор-строка параметров настройки нелинейного преобразования.
Будем искать результат нелинейного преобразования комплексной огибающей  в виде такого преобразования
в виде такого преобразования  которое менее всего отличается от комплексной огибающей
которое менее всего отличается от комплексной огибающей  некоторого ожидаемого сигнала с огибающей
некоторого ожидаемого сигнала с огибающей  и фазой . Степень такого отличия будем оценивать по величине среднего квадрата ошибки
и фазой . Степень такого отличия будем оценивать по величине среднего квадрата ошибки

Поиск оптимальных значений параметров настройки сводится к решению системы из линейных уравнений

Вследствие ортонормированности функций  получим решение этой системы уравнений
получим решение этой системы уравнений

Подставляя его в выражение для нелинейного преобразования огибающей получим

Простое накопление последовательности отсчётов после нелинейного преобразования  комплексной огибающей даёт статистику обнаружения
комплексной огибающей даёт статистику обнаружения

которая по форме записи не отличается от статистики известного способа обнаружения (1).
Очевидно, что при замене в (8) функции  её оценкой, предлагаемый способ становится адаптивным и оптимальным по критерию минимума СКО (7) ожидаемого сигнала
её оценкой, предлагаемый способ становится адаптивным и оптимальным по критерию минимума СКО (7) ожидаемого сигнала  при любой ПВ
при любой ПВ  .
.
Предлагаемый способ для слабых сигналов должен быть также эффективен, что и известный. Для этого представим составляющую процесса около частоты после нелинейного преобразования узкополосного процесса (3) в ряд Тейлора по степеням сигнала 

Здесь составляющая с полезным сигналом сосредоточена около частоты и отличается от полезного сигнала низкочастотным множителем - коэффициентом передачи слабого полезного сигнала при безынерционном нелинейном преобразовании  , который можно выразить как
, который можно выразить как

где  - первая производная функции .
- первая производная функции .
Сам низкочастотный множитель при полезном сигнале

может изменяться из-за помехи случайным образом как по величине, так и по знаку. Манипуляция по знаку может разрушить когерентность последующего накопления полезного сигнала в корреляторе или согласованном фильтре, что может привести к существенному ухудшению правильного обнаружения полезного сигнала.
Чтобы не допустить этого достаточно полярность огибающей ожидаемого сигнала в статистике обнаружения (8) изменять синхронно с изменением полярности коэффициента передачи слабого полезного сигнала, например так

где нелинейное преобразование

- используется для смены полярности ожидаемого сигнала.
Использование в (12) плотности вероятности значений отсчётов огибающей входного процесса  , а не помехи
, а не помехи  обусловлено их приближённым равенством для слабого сигнала .
обусловлено их приближённым равенством для слабого сигнала .
Таким образом, отсчёты процесса после адаптивного нелинейного преобразования

С учётом этого статистика обнаружения (8) по форме аналогична (1), но отличается использованием отсчётов  и
и  вместо аналогичных отсчётов помехи
вместо аналогичных отсчётов помехи

При этом нелинейное преобразование комплексной огибающей определяется выражением

Другими словами, статистика обнаружения (9) есть реальная часть значения взаимной ковариационной функции между последовательностями отсчётов комплексных огибающих полезного сигнала и результата нелинейного преобразования (10).
В реальных условиях полезный сигнал имеет неизвестную начальную фазу, поэтому вместо реальной части в (9) следует использовать модуль

Если полезный сигнал имеет также неизвестное время запаздывания, то используют согласованную фильтрацию (СФ). Статистика обнаружения в этом случае представляет собой модуль отклика согласованного фильтра

Для оценивания функции и первой производной функции  можно использовать как параметрические методы оценивания ПВ с последующей операцией деления, так и непараметрические.
можно использовать как параметрические методы оценивания ПВ с последующей операцией деления, так и непараметрические.
Пример непараметрического оценивания (восстановления) ПВ - это использование метода Парзена - Надарая [2, Восстановление зависимостей по эмпирическим данным. Вапник В. Н. Главная редакция физико-математической литературы издательства «Наука», М., 1979, - 448 с. на стр. 323-324], когда её представляют суммой
где  - потенциальная (ядерная) дифференцируемая функция аргумента
- потенциальная (ядерная) дифференцируемая функция аргумента  .
.
Параметрическое оценивание ПВ огибающей сводится к выбору известной функциональной зависимости от отсчёта с неизвестными в начале оценивания параметрами, которые оценивают при адаптации и затем используют для управления этой зависимостью. Заметим также, что можно оценивать не саму ПВ, а её функцию.
Для оценивания функции , а также первой производной функции , мы сглаживаем вариационный ряд отсчётов огибающей разложением в ряд по дважды дифференцируемым ортогональным функциям.
Выберем в качестве ортогонального базиса многочлены Лежандра [3], которые ортогональны на интервале  .
.


Тогда





Здесь  ,
, 
 -ая производная многочлена
-ая производная многочлена  по .
по .
Так как количество наблюдаемых данных равно , то на практике лучше использовать заранее вычисленные таблицы значений многочленов Лежандра, а также их первых двух производных, в равномерно отстоящих точках от -1 до +1, которые для отсчёта выбираются рангом  , то есть в выражениях (13) подставляют
, то есть в выражениях (13) подставляют  , а интеграл меняют на сумму.
, а интеграл меняют на сумму.
С учётом этого, нелинейное преобразование огибающей



или

Предлагаемый способ легко может быть реализован с помощью современных сигнальных процессоров с внешним или внутренним аналого-цифровым преобразованием огибающей и фазы входного процесса в последовательность дискретных отсчётов  . Это может быть, например, MultiClet R1 (см. руководство по эксплуатации) или TMS320F28335 (см. руководство по эксплуатации).
. Это может быть, например, MultiClet R1 (см. руководство по эксплуатации) или TMS320F28335 (см. руководство по эксплуатации).
Для подтверждения работоспособности и эффективности предлагаемого способа было проведено математическое моделирование обнаружителя одиночного радиоимпульса длительностью 520 отсчётов с внутриимпульсной фазовой манипуляцией 13-элементным кодом Баркера, задержанного на 520 отсчётов, на фоне синусоидальной помехи в виде смеси гауссова шума мощностью  и квазигармонического колебания с постоянной амплитудой
и квазигармонического колебания с постоянной амплитудой  и случайной угловой модуляцией на интервале
и случайной угловой модуляцией на интервале  .
.
Плотность вероятности огибающей синусоидальной помехи может быть представлена выражением

с параметром  , равным отношению мощности квазигармонической компоненты помехи к мощности шумовой.
, равным отношению мощности квазигармонической компоненты помехи к мощности шумовой.
Для оценки эффективности предлагаемого способа, полученные характеристики обнаружения сравнивались с аналогичными для линейного согласованного фильтра. Длительность времени анализа составляла 1500 отсчётов. Количество ортогональных функций  и 6. Оценка характеристик обнаружения проводилась по 1000 реализациям. При этом, порог обнаружения устанавливался соответствующим вероятности ложной тревоги 0,01. Затем, определялся уровень порогового отношения сигнал/(помеха+шум)
и 6. Оценка характеристик обнаружения проводилась по 1000 реализациям. При этом, порог обнаружения устанавливался соответствующим вероятности ложной тревоги 0,01. Затем, определялся уровень порогового отношения сигнал/(помеха+шум)  , соответствующий вероятности правильного обнаружения 0,9.
, соответствующий вероятности правильного обнаружения 0,9.
Выигрыш от применения предлагаемого способа по сравнению с линейной согласованной обработкой оценивался показателем
где  - пороговое отношение для линейной согласованной с сигналом обработки, а
- пороговое отношение для линейной согласованной с сигналом обработки, а  - пороговое отношение для предлагаемого способа.
- пороговое отношение для предлагаемого способа.
Ниже результаты моделирования выигрыша  при различных значениях параметров синусоидальной помехи
при различных значениях параметров синусоидальной помехи  :
:
 = 6,708 дБ m=5
= 6,708 дБ m=5
 = 16,535 дБ m=5
= 16,535 дБ m=5
 = 25,325 дБ m=6
= 25,325 дБ m=6
Известна методика расчёта выигрыша от применения асимптотически оптимальной (для слабого сигнала) нелинейной обработки в полосовом приёмном тракте [1, Теория обнаружения сигналов /П.С. Акимов, П.А. Бакут, В.А. Богданович и др.; Под ред. П.А. Бакута. - М.: Радио и связь, 1984.- 440 с. Формула 5.147 на стр.308]

где  - означает операцию математического ожидания случайной величины .
- означает операцию математического ожидания случайной величины .
Максимальный выигрыш  достигается для оптимальной амплитудной характеристики НП, которая согласуется с ПВ огибающей помехи в соответствии с выражением (2) и равен [1, Теория обнаружения сигналов / П.С. Акимов, П.А. Бакут, В.А. Богданович и др.; Под ред. П.А. Бакута. - М.: Радио и связь, 1984. - 440 с. Формула 5.151 на стр. 308]
достигается для оптимальной амплитудной характеристики НП, которая согласуется с ПВ огибающей помехи в соответствии с выражением (2) и равен [1, Теория обнаружения сигналов / П.С. Акимов, П.А. Бакут, В.А. Богданович и др.; Под ред. П.А. Бакута. - М.: Радио и связь, 1984. - 440 с. Формула 5.151 на стр. 308]
В книге [1, Теория обнаружения сигналов / П.С. Акимов, П.А. Бакут, В.А. Богданович и др.; Под ред. П.А. Бакута. - М.: Радио и связь, 1984.- 440 с. рисунок 5.13, кривая 1, на стр.301] представлены результаты расчёта показателя эффективности для синусоидальной помехи при различных значениях отношения помеха/шум :
= 7,0 дБ
= 17,0 дБ
= 27,0 дБ
Сравнение результатов расчёта с результатами моделирования доказывает высокую эффективность предлагаемого способа обнаружения для слабых сигналов, уступающей асимптотически оптимальному всего 0,3…1,5 дБ.
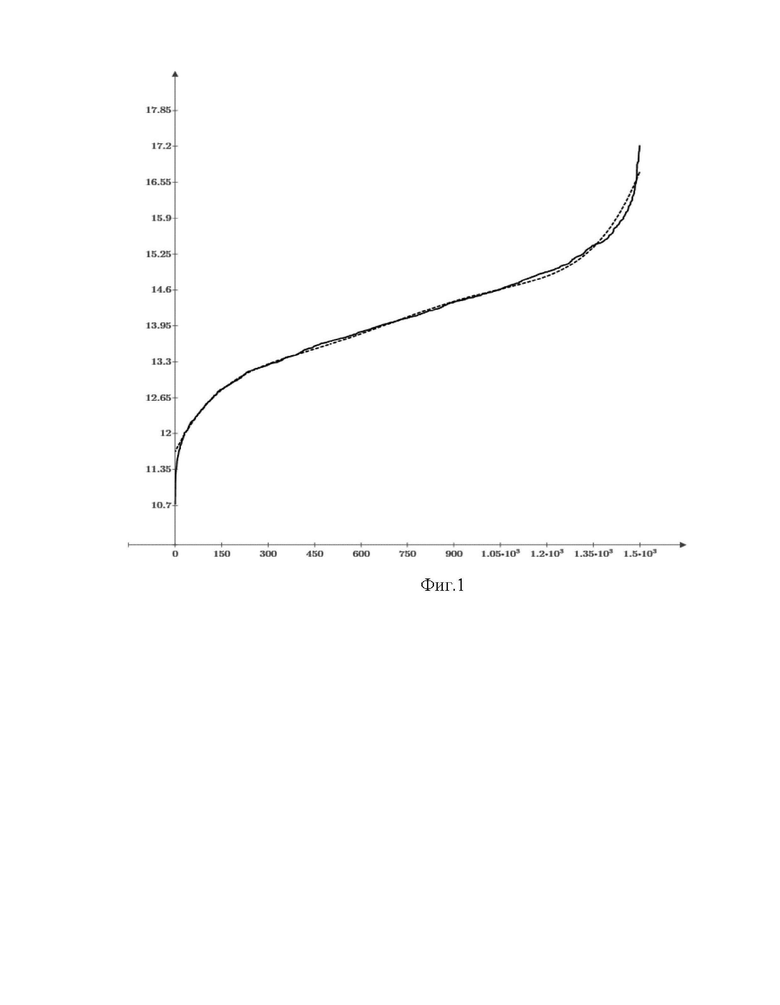
На Фиг. 1 представлены  отсчётов вариационного ряда (пунктирной линией) и результат его аппроксимации полиномами Лежандра
отсчётов вариационного ряда (пунктирной линией) и результат его аппроксимации полиномами Лежандра  (сплошной линией) для синусоидальной помехи с параметром
(сплошной линией) для синусоидальной помехи с параметром 
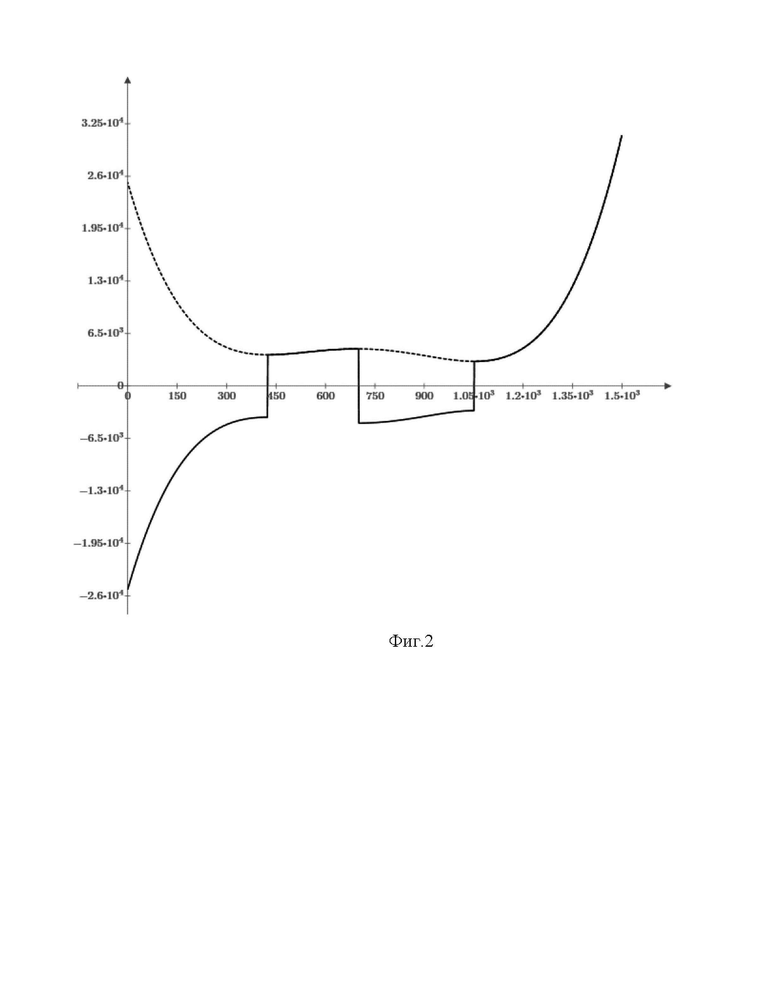
 Графики показывают, что вариационный ряд имеет вид возрастающей случайной кривой, в то время как его аппроксимация имеет вид гладкой монотонно возрастающей функции и является по сути сглаженным аналогом вариационного ряда. Для этой же помехи на Фиг. 2 представлены графики результата оценивания первой производной сглаженного вариационного ряда равного функции от ПВ
Графики показывают, что вариационный ряд имеет вид возрастающей случайной кривой, в то время как его аппроксимация имеет вид гладкой монотонно возрастающей функции и является по сути сглаженным аналогом вариационного ряда. Для этой же помехи на Фиг. 2 представлены графики результата оценивания первой производной сглаженного вариационного ряда равного функции от ПВ  (пунктирной линией) и итоговый результат нелинейного преобразования огибающей
(пунктирной линией) и итоговый результат нелинейного преобразования огибающей  , в котором уже учтен наклон производной
, в котором уже учтен наклон производной  (сплошной линией).
(сплошной линией).
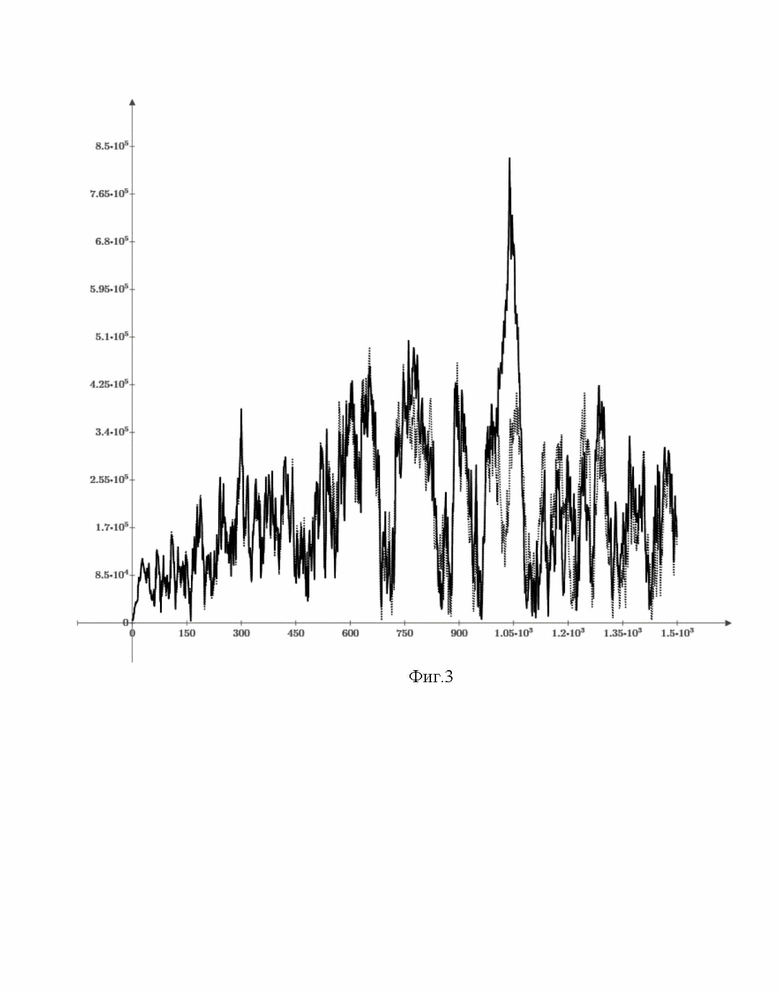
На Фиг. 3 представлен модуль отклика согласованного фильтра после нелинейного преобразования комплексной огибающей для предлагаемого способа при отсутствии полезного сигнала на входе (пунктир) и при его наличии (сплошная линия), когда сигнал - «слабый», то есть отношение сигнал/(помеха+шум) на входе равно -31,815 дБ при вероятности правильного обнаружения 0,9. При этом максимум отклика наблюдается в нужный по теории момент через 1040 отсчётов, т.е. время задержки на 520 отсчётов плюс длительность полезного сигнала в 520 отсчётов.
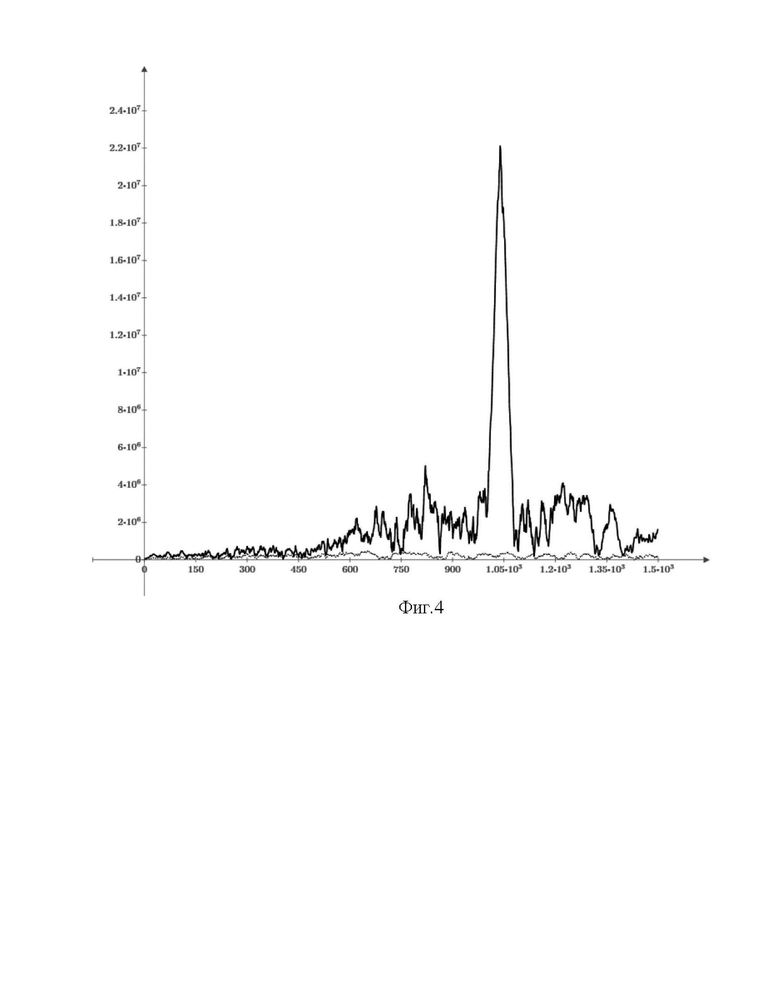
На Фиг. 4 представлен отклик согласованного фильтра после нелинейного преобразования комплексной огибающей для предлагаемого способа без сигнала на входе (пунктир) и при его наличии (сплошная линия), когда сигнал - «сильный», то есть отношение сигнал/(помеха+шум) на входе равно 0 дБ. Максимум отклика наблюдается в нужный по теории момент через 1040 отсчётов, равное времени задержки на 520 отсчётов плюс длительность полезного сигнала в 520 отсчётов.
Форма отклика СФ при наличии сигнала и для слабого сигнал и для сильного полностью соответствует форме автокорреляционной функции (АКФ) одиночного радиоимпульса [5, смотри вид АКФ на Рис. 3.6 в) на стр.46 в книге Варакин Л. Е. Системы связи с шумоподобными сигналами. - М.: Радио и связь, 1985. - 384 с].
Таким образом, предлагаемый способ, позволяет в режиме реального времени или с заданной не существенной задержкой максимально эффективно обнаруживать полезный сигнал в реальных условиях приёма, когда вероятностные характеристики огибающей помехи неизвестны или меняются во времени, при этом отношение сигнал-помеха может быть произвольным, в том числе и близким к нулю.
ЛИТЕРАТУРА.
1. Теория обнаружения сигналов / П.С. Акимов, П.А. Бакут, В.А. Богданович и др.; Под ред. П.А. Бакута. - М.: Радио и связь, 1984. - 440 с.
2. Восстановление зависимостей по эмпирическим данным. Вапник В. Н. Главная редакция физико-математической литературы издательства «Наука», М., 1979, - 448 с.
3. Г. Корн, Т. Корн. Справочник по математике (для научных работников инженеров). Издательство «Наука». Главная редакция физико-математической литературы, М., 1973. 832 с.
4. Варакин Л.Е. Системы связи с шумоподобными сигналами. - М.: Радио и связь, 1985. - 384 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения полезного сигнала на фоне аддитивной помехи | 2023 |
|
RU2819813C1 |
| РАДИОПРИЕМНОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ШИРОКОПОЛОСНЫХ СИГНАЛОВ С ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 1981 |
|
SU1840289A1 |
| СПОСОБ ДВУХКАНАЛЬНОГО ОБНАРУЖЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ СО СТАБИЛИЗАЦИЕЙ ВЕРОЯТНОСТИ ЛОЖНОЙ ТРЕВОГИ | 2015 |
|
RU2585257C1 |
| Способ согласованной нелинейной корреляционно-вероятностной фильтрации сигналов и устройство для его реализации | 2018 |
|
RU2723441C2 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ СЛУЧАЙНЫХ СИГНАЛОВ | 2003 |
|
RU2245561C1 |
| Способ защиты от узкополосных и импульсных помех для цифрового приёмника | 2018 |
|
RU2695542C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ КВАДРАТУРНОГО ПРИЕМНИКА | 2013 |
|
RU2549207C2 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2352063C1 |
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛА ИЗВЕСТНОГО ТОЧНО И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2366091C2 |
| КАНАЛ МНОГОКАНАЛЬНОГО УСТРОЙСТВА ДЛЯ ВЫДЕЛЕНИЯ ШИРОКОПОЛОСНОГО СИГНАЛА ИЗ ПОМЕХ | 1983 |
|
SU1840215A1 |
Изобретение относится к области радиоэлектроники. Технический результат заключается в повышении эффективности обнаружения полезного сигнала. Из узкополосной аддитивной смеси полезного сигнала и помехи выделяют огибающую и фазу, осуществляют их дискретизацию с получением последовательности дискретных отсчетов, сохраняют отсчеты и ранжируют, получая вариационный ряд, сглаживают его монотонно возрастающей функцией от целочисленного аргумента - ранга и получают последовательность отсчетов сглаженной оценки вариационного ряда, оценивают производную от сглаживающей монотонной функции для каждого отсчета последовательности рангов и получают последовательность отсчетов огибающей выходного колебания, фаза которого совпадает с фазой входного колебания, далее оценивают коэффициент передачи слабого сигнала для каждого отсчета последовательности рангов, изменяют полярность отсчетов огибающей выходного колебания каждый раз при смене полярности отсчета коэффициента передачи слабого сигнала, определяют значения модуля функции ковариации между последовательностью отсчетов, полученной в результате такого нелинейного преобразования, и заданной последовательностью отсчетов полезного сигнала, сравнивают его с заданным порогом обнаружения и принимают решение о наличии или отсутствии полезного сигнала. 4 ил.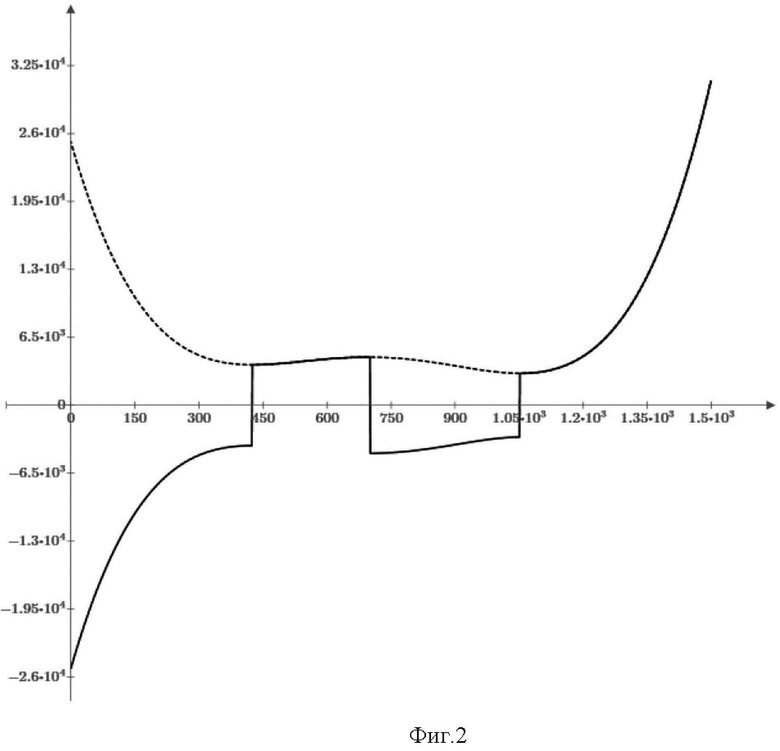
Способ обнаружения полезного сигнала в узкополосной аддитивной смеси с помехой, включающий выделение огибающей и фазы узкополосного процесса изменения тока или напряжения во времени на выходе приемного тракта, их дискретизацию в соответствии с теоремой Котельникова с получением последовательности дискретных отсчетов огибающей и фазы в равностоящие моменты времени, сохранение этих отсчетов в памяти вычислительного устройства, ранжирование последовательности сохраненных отсчетов огибающей и получение их вариационного ряда, сглаживание вариационного ряда монотонно возрастающей функцией от целочисленного аргумента – ранга и получение в результате сглаживания последовательности уникальных отсчетов сглаженной оценки вариационного ряда, оценивание производной от сглаживающей монотонной функции для каждого отсчета последовательности рангов и получение в результате оценки производной последовательности отсчетов огибающей выходного колебания, фаза которого совпадает с фазой входного колебания, далее оценивание коэффициента передачи слабого сигнала при таком нелинейном преобразовании огибающей для каждого отсчета последовательности рангов, изменение полярности отсчетов огибающей выходного колебания каждый раз при смене полярности отсчета коэффициента передачи слабого сигнала, определение значения модуля функции ковариации между последовательностью отсчетов, полученной в результате такого нелинейного преобразования, и заданной последовательностью отсчетов полезного сигнала, причём вычисленное значение модуля функции ковариации далее сравнивают с заданным порогом обнаружения и в зависимости от результата сравнения принимают решение о наличии или отсутствии полезного сигнала на выходе приемного тракта.
| СПОСОБ НЕРАЗРУШАЮЩЕГО ОБНАРУЖЕНИЯ ИМПУЛЬСНЫХ РАДИОСИГНАЛОВ В УСЛОВИЯХ УЗКОПОЛОСНЫХ ПОМЕХ | 2020 |
|
RU2747577C1 |
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛА ИЗВЕСТНОГО ТОЧНО И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2366091C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ УЗКОПОЛОСНЫХ СИГНАЛОВ | 2009 |
|
RU2419968C2 |
| WO 03094372 A1, 13.11.2003 | |||
| Теория обнаружения сигналов, под ред | |||
| П.А | |||
| Бакута, М.: Радио и связь, 1984. | |||

