Предлагаемое устройство относится к области радиолокационной техники и может быть использовано в РЛС обнаружения с относительно низкой частотой повторения зондирующих импульсов (порядка 2000 Гц) для распознавания воздушных объектов с вращающимися элементами (например, вертолетов, винтовых самолетов).
Известно устройство для распознавания воздушных объектов, содержащее последовательно соединенные импульсную РЛС, фильтр с шириной пропускания 100-2000 Гц, пороговую схему и микропроцессор и определяющее периодичность выбросов огибающей радиосигналов, а также позволяющее распознавать воздушные объекты с вращающимися элементами, например вертолеты (патент США №4389647, 1983 г., МПК G 01 S 13/52). Недостатком этого устройства является большое время (более 1с) контакта с объектом, что в РЛС обнаружения практически исключено.
Также известно устройство, содержащее РЛС, пороговое устройство, формирователь импульсов стробирования, блок выбора программ обучения и классификации, блок фильтров, аналого-цифровой преобразователь (АЦП), блок формирования адиабатических инвариантов и признаков в фазовой плоскости, классификатор, блок формирования признаков по линейному предсказанию, блок хранения эталонов, блок формирования временного окна, блок принятия решения, блок индикации. Устройство позволяет распознавать динамические объекты по кратковременным радиолокационным процессам в режиме обзора (авторское свидетельство №191204). Недостатком известного устройства являются его сложность и высокая частота повторения зондирующих импульсов, что не позволяет использовать устройство в РЛС обнаружения.
Наиболее близким техническим решением к предлагаемому устройству является устройство для распознавания случайных сигналов (авторское свидетельство №928374, 1982 г., МКП G 01 S 13/52). Устройство содержит аналого-цифровой преобразователь (АЦП), вход которого является входом устройства, цифровой вычислительный блок (ЦВБ), содержащий генератор тригонометрических функций, умножитель, два сумматора, два квадратора и делитель, первые входы умножителя и первого квадратора блока ЦВБ соединены с выходом АЦП, второй вход умножителя подключен к выходу генератора тригонометрических функций, а выход соединен с входом первого сумматора, выход которого через второй квадратор подключен к первому входу делителя, второй вход которого соединен с выходом второго сумматора, подключенного входом к выходу первого квадратора, второй выход умножителя соединен с входом запуска генератора тригонометрических функций; выход делителя ЦВБ подключен к информационному входу оперативного запоминающего устройства (ОЗУ), две схемы сравнения, первые входы которых соединены, два элемента И, блок управления, содержащий генератор тактовых импульсов и счетчик импульсов, постоянное запоминающее устройство (ПЗУ), блок умножения и дополнительный сумматор, причем управляющий вход ПЗУ соединен с выходом генератора тактовых импульсов блока управления, а выход подключен к первому входу блока умножения, второй вход которого соединен с выходом ОЗУ, а выход через дополнительный сумматор подключен к первому входу первой схемы сравнения.
Известное устройство работает следующим образом. Входной сигнал после преобразования в цифровую форму поступает на вход ЦВБ, в котором осуществляется оценка нормированного энергетического спектра с помощью алгоритма дискретного преобразования Фурье. Значения оценок нормированного энергетического спектра по мере их вычисления накапливаются в ОЗУ. После завершения вычисления оценок нормированного энергетического спектра по их числовым характеристикам последовательно во времени в умножителе и сумматоре вычисляются оценки спектральных моментов, которые сравниваются в устройствах сравнения с соответствующими порогами, и принимается решение о принадлежности случайного сигнала к распознаваемому классу объектов.
Недостатками известного устройства для распознавания случайных сигналов являются отсутствие возможности распознавания объектов при относительно низких частотах повторения зондирующих импульсов (порядка 2000 Гц), так как для получения достаточно точных оценок спектральных моментов требуется более высокая частота повторения зондирующих импульсов; отсутствие возможности использования устройства в условиях работы с ограниченным временем наблюдения воздушного объекта, например в РЛС обнаружения; низкая помехоустойчивость при воздействии интенсивных пассивных помех. По этой причине данное устройство не может быть использовано в РЛС обнаружения с частотой повторения импульсов порядка 2000 Гц и ограниченным временем наблюдения (десятки мс) в качестве устройства распознавания воздушных объектов с вращающимися элементами.
Техническим результатом (решаемой задачей) заявляемого устройства является распознавание воздушных объектов с вращающимися элементами (например, вертолетов, винтовых самолетов) с помощью РЛС обнаружения с относительно низкой частотой повторения зондирующих импульсов (порядка 2000 Гц) и малым временем контакта с воздушным объектом (десятки мс) в условиях воздействия интенсивных пассивных помех.
Технический результат (поставленная задача) достигается тем, что в известное устройство для распознавания случайных сигналов, содержащее последовательно соединенные АЦП, вход которого является первым входом устройства, ЦВБ, содержащий квадратор и последовательно соединенные умножитель, первый вход которого является первым входом ЦВБ, и сумматор, ОЗУ, а также содержащее устройство сравнения и блок управления (БУ), содержащий генератор тактовых импульсов и счетчик импульсов, введены (N-1) ЦВБ, последовательно соединенные мультиплексор, устройство ранжирования, блок вычислений, а также инвертор, причем первые входы (N-1) ЦВБ подключены к выходу АЦП, а их выходы - к соответствующим входам ОЗУ, N выходов которого соединены с соответствующими входами мультиплексора; первый выход БУ подключен ко вторым входам N ЦВБ, второй выход - к управляющему входу мультиплексора, третий выход - к третьим входам N ЦВБ и второму входу устройства ранжирования, четвертый выход - к входу считывания мультиплексора, третьему входу устройства ранжирования и через инвертор к четвертому входу устройства ранжирования. Второй вход блока вычислений является вторым входом устройства, а выход подключен к входу устройства сравнения, выход которого является выходом устройства. Кроме того, в каждый ЦВБ введены ПЗУ, вход которого является вторым входом ЦВБ, а выход ПЗУ подключен ко второму входу умножителя, и регистр сдвига, первый вход которого соединен с выходом сумматора, второй вход регистра сдвига является третьим входом ЦВБ, первый выход регистра сдвига подключен к входу квадратора, выход которого является выходом ЦВБ, а второй выход регистра сдвига - ко второму входу сумматора. В БУ введены последовательно соединенные второй и третий счетчики импульсов и схема И, первый вход которой соединен с входом первого счетчика и подключен к выходу генератора тактовых импульсов, выход первого счетчика соединен с входом второго счетчика, второй выход которого является первым выходом БУ; первый выход третьего счетчика является вторым выходом БУ, а второй выход - третьим выходом БУ и соединен со вторым входом схемы И, выход которой является четвертым выходом БУ и подключен ко второму входу третьего счетчика.
В качестве зондирующего сигнала, излучаемого РЛС обнаружения, используется пачка, состоящая из М когерентных подпачек по N импульсов (когерентными называют сигналы с закономерной фазовой структурой – “Теоретические основы радиолокации” под ред. Я.Д.Ширмана, М., “Сов. радио”, стр.105, абзац 2 снизу), то есть зондирующий сигнал в целом состоит из M· N импульсов. Когерентная обработка всей пачки производится по частям: каждые N импульсов подвергаются N-точечному дискретному преобразованию Фурье (Б.Голд, Ч.Рэйдер. Цифровая обработка сигналов, М., “Сов. радио”, 1973 г., стр.191, абзац 1) и анализируются. Обработка всей пачки зондирующего сигнала по частям позволяет более гибко и рационально использовать временные ресурсы при организации обзора в РЛС обнаружения без нарушения ее функционирования как обнаруживающего устройства. Количество М когерентных подпачек должно быть таким, чтобы обеспечить попадание главного максимума диаграммы вторичного излучения лопасти вращающегося винта (для объекта с вращающимися элементами) с вероятностью, близкой к единице, во временное окно, занимаемое пачкой из M· N импульсов. Величина М определяется по формуле
где [· ] - означает операцию взятия целой части числа;
ТП - период повторения импульсов зондирующего сигнала;
m и v - соответственно число и частота вращения лопастей воздушного винта объекта с вращающимися элементами.
В качестве признака наличия объекта с вращающимися элементами используются особенности радиолокационного сигнала, отраженного от вращающегося винта, которые для объекта без вращающихся элементов отсутствуют. Если главный максимум диаграммы вторичного излучения лопасти вращающегося винта попадает во временное окно, в которое укладывается N когерентно накапливаемых импульсов, то в среднем огибающая амплитудно-частотного спектра имеет незначительные колебания, интенсивность каждой гармоники достаточно высока, а ширина спектра определяется максимальной радиальной скоростью вращения лопасти.
Огибающая спектра сигнала, отраженного от объекта без вращающихся элементов, имеет колоколообразный характер. Предположим, что N цифровых вычислительных блоков настроены на отдельные гармоники спектра. Составим вариационный ряд из величин, взятых на выходах цифровых блоков в порядке их возрастания (Справочник по теории вероятностей и математической статистике, М., “Наука”, 1985 г., стр.534, абзац 3). При попадании главного максимума диаграммы вторичного излучения лопасти вращающегося винта во временное окно, состоящее из N когерентно накапливаемых импульсов, члены вариационного ряда (порядковые статистики) для объекта с вращающимися элементами имеют примерно одинаковую интенсивность. Для объекта без вращающихся элементов первые члены вариационного ряда имеют уровни мощности существенно ниже. Таким образом, существует такая порядковая статистика, при использовании которой распознавание объекта с вращающимися элементами наиболее эффективно. М значений данной порядковой статистики выстраиваются в другой вариационный ряд, и из его элементов выделяется неоднородная часть, которая характеризует попадание главного максимума диаграммы вторичного излучения лопасти вращающегося винта во временное окно, занимаемое пачкой из М· N импульсов. Кроме того, для обеспечения возможности распознавания при воздействии пассивных помех в предлагаемом устройстве реализованы следующие функции: из М значений элементов вариационного ряда вычитается значение элемента с минимальной величиной и производится экспоненциальное преобразование элементов полученного ряда (нелинейная обработка), в результате помехоустойчивость предлагаемого устройства значительно повышается.
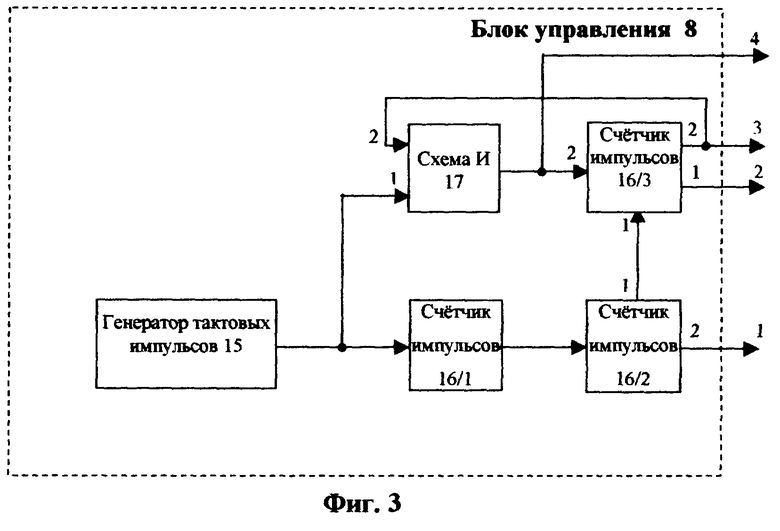
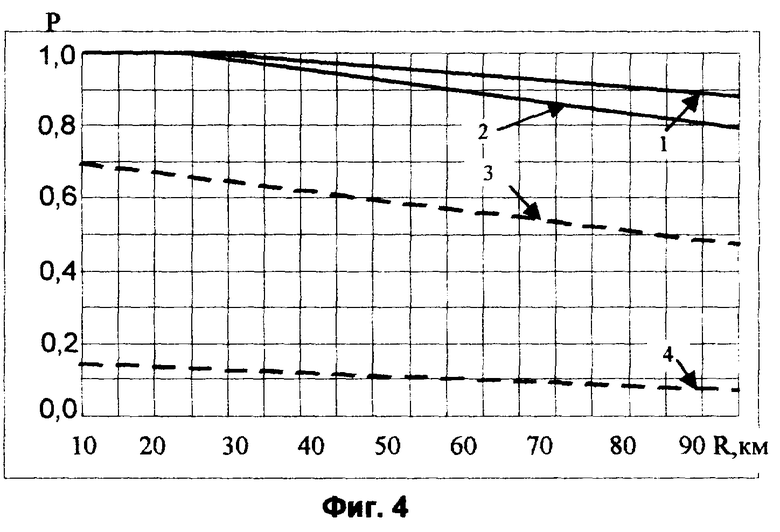
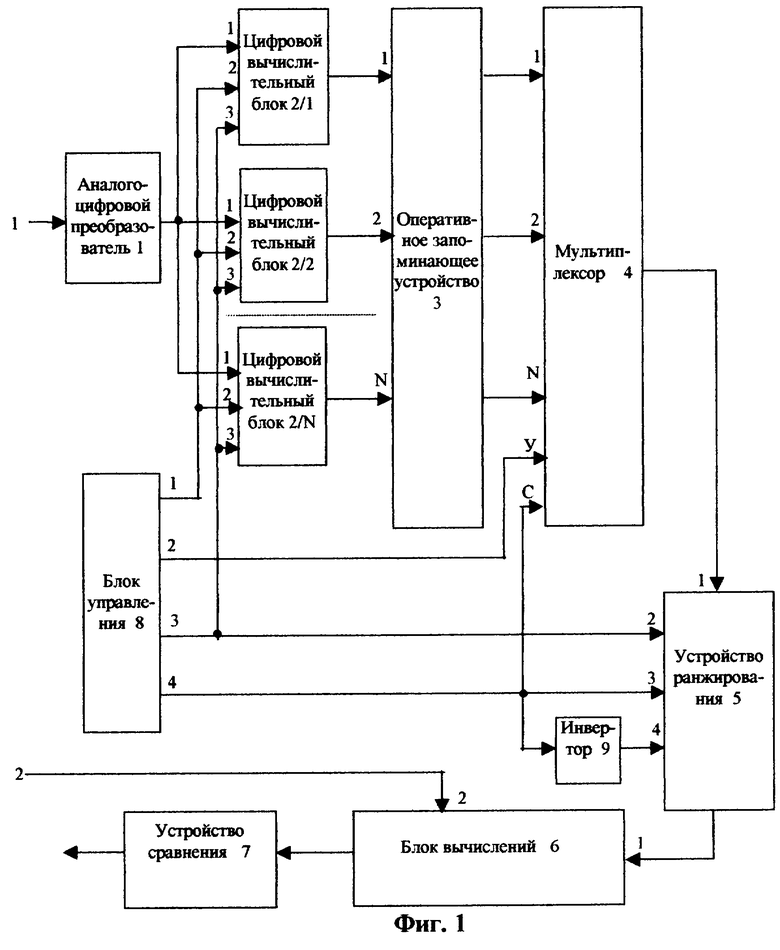
На фиг.1 приведена общая структурная схема предлагаемого устройства; на фиг.2 - структурная схема цифрового вычислительного блока, на фиг.3 - структурная схема блока управления, на фиг.4 показаны сглаженные зависимости оценок вероятностей правильного распознавания объекта с вращающимися элементами (вертолета) при воздействии пассивных помех с уровнем мощности порядка 60 дБ от значения дальности, где принимается решение о принадлежности случайного сигнала к классу объекта. Цифрами 1 и 4 отмечены кривые, построенные для объекта, движущегося со скоростью 60 м/сек, цифрами 2 и 3 - со скоростью 10 м/сек. Сплошными линиями проведены кривые, соответствующие включению нелинейной обработки для подавления пассивной помехи, пунктирными линиями - без нелинейной обработки.
Устройство для распознавания случайных сигналов (Фиг.1) содержит АЦП 1, N ЦВБ 2/1-2/N, ОЗУ 3, последовательно соединенные мультиплексор 4, устройство ранжирования 5, блок вычислений 6, устройство сравнения 7, выход которого является выходом всего устройства, а также содержит блок управления 8 и инвертор 9.
Первые входы N ЦВБ 2/1-2/N объединены и подключены к выходу АЦП 1. N цифровых вычислительных блоков ЦВБ 2/1-2/N реализуют алгоритм дискретного преобразования Фурье (Б.Голд, Ч.Рэйдер. Цифровая обработка сигналов, М., “Сов. радио”, 1973 г., стр.191, абзац 1), так что каждый из N ЦВБ 2/1-2/N настроен на отдельную дискретную область спектра сигнала, отраженного от распознаваемого объекта. Вход АЦП является первым входом всего устройства, вторым входом которого является второй вход блока вычислений 6. Вторые входы всех N ЦВБ 2/1-2/N объединены и подключены к первому выходу блока управления 8, второй выход которого соединен с управляющим входом мультиплексора 4. Третий выход блока управления 8 подключен к третьим входам N ЦВБ 2/1-2/N и второму входу устройства ранжирования 5, а четвертый выход блока управления 8 - к входу считывания мультиплексора 4, третьему входу устройства ранжирования 5 и через инвертор к четвертому входу устройства ранжирования 5.
Выход каждого из N ЦВБ 2/1-2/N соединен с соответствующим входом ОЗУ 3, каждый из N выходов которого подключен к соответствующему входу мультиплексора 4.
Каждый ЦВБ 2/1-2/N содержит последовательно соединенные умножитель 10, первый вход которого является первым входом блока, сумматор 11, регистр сдвига 12 и квадратор 13, выход которого является выходом блока, а также ПЗУ 14, вход которого является вторым входом блока, а выход - вторым входом умножителя 10. Второй вход регистра сдвига 12 является третьим входом блока, а второй выход регистра сдвига 12 подключен ко второму входу сумматора 11.
Блок управления 8 содержит последовательно соединенные генератор тактовых импульсов 15, первый счетчик 16/1, второй счетчик 16/2, второй выход которого является первым выходом блока, третий счетчик 16/3, первый выход которого является вторым выходом блока, а второй выход - третьим выходом блока и подключен ко второму входу схемы И 17, первый вход которой подсоединен к выходу генератора тактовых импульсов 15, а выход является четвертым выходом блока и подключен ко второму входу третьего счетчика 16/3.
Устройство ранжирования 5 формирует заданную порядковую статистику (элемент вариационного ряда) и может быть выполнено аналогично устройству для ранжирования чисел по авторскому свидетельству №1198509, 1985 г., МКП G 06 F 7/06. Хотя в известном устройстве для ранжирования чисел показано только три входа, но поскольку в его описании говорится о необходимости обнуления входных сдвиговых регистров перед началом работы, то в предлагаемом устройстве ранжирования 5 имеется дополнительный второй вход для поступления на входные сдвиговые регистры известного устройства для ранжирования чисел обнуляющих импульсов после обработки каждой подпачки, состоящей из N импульсов распознаваемой пачки сигнала. Кроме того, известное устройство для ранжирования чисел имеет N выходов, причем r-ому номеру ранга вариационного ряда соответствует r-ый номер выходного регистра.
Моделирование работы предлагаемого устройства показало, что существует такой ранг г вариационного ряда из N элементов, при котором соответствующее ему значение вариационного ряда для объектов класса “объект с вращающимися элементами” (например, вертолет, винтовой самолет) и объектов без вращающихся элементов имеет наибольшие отличия. Конкретное значение ранга, при котором наблюдается такое отличие, зависит от числа N накапливаемых импульсов распознаваемой пачки сигнала. Так, при N=8 наиболее высокие вероятности распознавания вертолета в классе воздушных объектов без вращающихся элементов имеют место для r=2 (Фиг.4, кривые 1 и 2). Поэтому из N выходов известного устройства для ранжирования чисел к входу блока вычислений 6 подключен только тот, при использовании которого ожидается получить наиболее достоверное распознавание объектов с вращающимися элементами.
Блок вычислений 6 может быть выполнен на основе микропроцессора, работающего по следующему алгоритму:
- построение вариационного ряда заданного размера;
- вычитание из элементов вариационного ряда его минимального значения и преобразование полученного вариационного ряда с помощью экспоненциальной обработки в другой вариационный ряд;
- выделение в преобразованном вариационном ряду однородной части и сравнение оставшейся части вариационного ряда с однородной частью (выделение неоднородной части вариационного ряда);
- вычисление отношения неоднородной и однородной частей вариационного ряда и принятие решения в зависимости от величины этого отношения о принадлежности случайного сигнала к распознаваемому классу объектов.
В качестве генератора тактовых импульсов может быть использован, например, генератор тактовых импульсов, описанный в книге “Проектирование микроэлектронных цифровых устройств” под ред. С.А.Майорова, М., “Сов. радио”, 1977 г., стр.208, абзац 1).
Количество N цифровых вычислительных блоков определяется по формуле  , где [· ] означает операцию взятия целой части, ТП - период повторения импульсов зондирующего сигнала, ТН0 - заданное время наблюдения в одном угловом положении луча диаграммы направленности антенны, выбранное так, чтобы не происходило существенного ухудшения обзора пространства в РЛС обнаружения и она (РЛС обнаружения) могла выполнять свою основную задачу - обнаружение воздушных объектов.
, где [· ] означает операцию взятия целой части, ТП - период повторения импульсов зондирующего сигнала, ТН0 - заданное время наблюдения в одном угловом положении луча диаграммы направленности антенны, выбранное так, чтобы не происходило существенного ухудшения обзора пространства в РЛС обнаружения и она (РЛС обнаружения) могла выполнять свою основную задачу - обнаружение воздушных объектов.
Практически при частоте повторения импульсов порядка 2000 Гц число ЦВБ может быть равно 8... 16.
Предлагаемое устройство работает следующим образом. На первый вход устройства поступают импульсы распознаваемой пачки сигнала, а на второй вход устройства - значение дальности до радиолокационного объекта. Импульсы распознаваемой пачки сигнала  , после преобразования их в цифровую форму в АЦП 1, умножаются в умножителях 10 всех ЦВБ 2/1-2/N на комплексные весовые коэффициенты
, после преобразования их в цифровую форму в АЦП 1, умножаются в умножителях 10 всех ЦВБ 2/1-2/N на комплексные весовые коэффициенты  , поступающие из ПЗУ 14:
, поступающие из ПЗУ 14:

i - номер ЦВБ, i=1,... ,N.
Текущие результаты умножения  складываются в сумматорах 11 с предшествующими значениями
складываются в сумматорах 11 с предшествующими значениями  , поступающими со вторых выходов регистров сдвига 12. С первых выходов регистров сдвига 12 без задержки во времени на входы квадраторов 13 поступают накапливаемые значения
, поступающими со вторых выходов регистров сдвига 12. С первых выходов регистров сдвига 12 без задержки во времени на входы квадраторов 13 поступают накапливаемые значения  . Накопленные произведения возводятся в квадрат в квадраторах 13 и фиксируются в ОЗУ 3. Генератор тактовых импульсов 15 блока управления 8 вырабатывает синхроимпульсы с частотой, в N раз превышающей частоту следования импульсов распознаваемой пачки сигнала, а счетчик 16/1 выполняет функцию деления в N раз частоты следования синхроимпульсов. Каждый N-й синхроимпульс преобразуется в счетчике 16/2 в соответствующий двоичный код и поступает с его первого выхода с частотой, сопровождающей частоту следования импульсов распознаваемой пачки сигнала, на вход ПЗУ 14 блоков ЦВБ 2/1-2/N для считывания весовых коэффициентов
. Накопленные произведения возводятся в квадрат в квадраторах 13 и фиксируются в ОЗУ 3. Генератор тактовых импульсов 15 блока управления 8 вырабатывает синхроимпульсы с частотой, в N раз превышающей частоту следования импульсов распознаваемой пачки сигнала, а счетчик 16/1 выполняет функцию деления в N раз частоты следования синхроимпульсов. Каждый N-й синхроимпульс преобразуется в счетчике 16/2 в соответствующий двоичный код и поступает с его первого выхода с частотой, сопровождающей частоту следования импульсов распознаваемой пачки сигнала, на вход ПЗУ 14 блоков ЦВБ 2/1-2/N для считывания весовых коэффициентов  .
.
Когда число накопленных значений  станет равным N, то N-й импульс с первого выхода счетчика 16/2 поступит на первый вход счетчика 16/3. Счетчик 16/3 установится в начальное состояние, а с его инверсного второго выхода на второй вход схемы И 17 поступит импульс, разрешающий прохождение синхроимпульсов генератора тактовых импульсов 15 на второй вход счетчика 16/3. С первого выхода счетчика 16/3 (являющегося вторым выходом блока управления 8) на управляющий вход мультиплексора 4 начнут поступать адреса считывания соответствующих N значений
станет равным N, то N-й импульс с первого выхода счетчика 16/2 поступит на первый вход счетчика 16/3. Счетчик 16/3 установится в начальное состояние, а с его инверсного второго выхода на второй вход схемы И 17 поступит импульс, разрешающий прохождение синхроимпульсов генератора тактовых импульсов 15 на второй вход счетчика 16/3. С первого выхода счетчика 16/3 (являющегося вторым выходом блока управления 8) на управляющий вход мультиплексора 4 начнут поступать адреса считывания соответствующих N значений  с выходов ОЗУ 3.
с выходов ОЗУ 3.
Одновременно с выхода схемы И 17 (являющегося четвертым выходом БУ 8) на вход считывания мультиплексора 4 приходят синхроимпульсы считывания. Схема И 17 пропускает N синхроимпульсов генератора тактовых импульсов 15 между N-м и (N-1)-м импульсами распознаваемой пачки сигнала, а затем блокируется (N-1)-м импульсом генератора тактовых импульсов, поступившим на второй вход схемы И 17 с инверсного второго выхода счетчика 16/3.
Таким образом, между N-м и (N-1)-м импульсами распознаваемой пачки сигнала мультиплексор 4 в соответствии с поступившим адресом на его управляющий вход “У” и синхроимпульсом считывания на вход “С” считывает накопленные N значений  с выходов ОЗУ 3 с частотой следования синхроимпульсов. С поступлением (N+1)-го импульса распознаваемой пачки сигнала описанный выше процесс накопления результатов обработки подпачки, состоящей из N импульсов распознаваемой пачки сигнала, повторяется. Число подпачек равно М.
с выходов ОЗУ 3 с частотой следования синхроимпульсов. С поступлением (N+1)-го импульса распознаваемой пачки сигнала описанный выше процесс накопления результатов обработки подпачки, состоящей из N импульсов распознаваемой пачки сигнала, повторяется. Число подпачек равно М.
Последовательность чисел  , выраженных m-разрядным числовым кодом, с частотой, равной частоте следования синхроимпульсов, поступает на первый вход устройства ранжирования 5. На третий и четвертый входы устройства ранжирования 5 с четвертого выхода блока управления 8 приходят, соответственно, синхроимпульсы сдвига и записи, синхронизирующие работу устройства ранжирования 5, причем синхроимпульсы записи сдвинуты на полтакта относительно синхроимпульсов сдвига с помощью инвертора 9.
, выраженных m-разрядным числовым кодом, с частотой, равной частоте следования синхроимпульсов, поступает на первый вход устройства ранжирования 5. На третий и четвертый входы устройства ранжирования 5 с четвертого выхода блока управления 8 приходят, соответственно, синхроимпульсы сдвига и записи, синхронизирующие работу устройства ранжирования 5, причем синхроимпульсы записи сдвинуты на полтакта относительно синхроимпульсов сдвига с помощью инвертора 9.
N-й импульс, снимаемый с инверсного второго выхода счетчика 16/3 (третий выход блока управления 8), поступая на третьи входы ЦВБ 2/1-2/N и второй вход устройства ранжирования 5, своим передним фронтом обнуляет второй выход регистров сдвига 12 ЦВБ 2/1-2/N и входные регистры устройства ранжирования 5 и тем самым подготавливает ЦВБ 2/1-2/N и устройство ранжирования 5 к обработке следующей подпачки из N импульсов распознаваемой пачки сигнала.
Таким образом, блок управления 8 выполняет следующие функции:
- считывание в реальном времени с помощью импульсов, формируемых на первом выходе БУ, комплексных коэффициентов из ПЗУ 14 ЦВБ 2/1-2/N;
- считывание между N-м и (N+1)-м импульсами распознаваемой пачки сигнала с помощью синхроимпульсов адреса (второй выход БУ) и синхроимпульсов считывания (четвертый выход БУ) результатов когерентного накопления подпачки из N импульсов распознаваемой пачки сигнала;
- обнуление перед поступлением N+1-го импульса распознаваемой пачки сигнала с помощью синхроимпульсов обнуления (третий выход БУ) второго выхода регистров сдвига 12 блоков ЦВБ 2/1-2/N, а также входных регистров устройства ранжирования 5;
- синхронизация работы устройства ранжирования 5 с помощью синхроимпульсов, формируемых на четвертом выходе БУ.
Устройство ранжирования 5 в реальном времени формирует вариационный ряд (порядковые статистики) из N поступивших на его первый вход величин  . Значение ранга г вариационного ряда из N элементов, соответствующее номеру используемого выхода известного устройства для ранжирования чисел (авторское свидетельство №1198509, 1985 г., МКП G 06 F 7/06), определяется на этапе обучения алгоритма. М значений вариационного ряда
. Значение ранга г вариационного ряда из N элементов, соответствующее номеру используемого выхода известного устройства для ранжирования чисел (авторское свидетельство №1198509, 1985 г., МКП G 06 F 7/06), определяется на этапе обучения алгоритма. М значений вариационного ряда  поступают на первый вход блока вычислений 6, на второй вход которого поступает значение дальности радиолокационного объекта.
поступают на первый вход блока вычислений 6, на второй вход которого поступает значение дальности радиолокационного объекта.
В блоке вычислений 6 реализуется функция подавления пассивных помех, а также функция выделения из значений вариационного ряда неоднородной части, наличие которой является признаком присутствия в пачке распознаваемого сигнала отражений от лопастей вращающегося винта воздушного объекта. В соответствии с упомянутыми функциями в блоке вычислений 6 выполняются следующие вычислительные операции:
- построение вариационного ряда {Yj} из М значений Vi

- вычитание из элементов ряда {Yj} его минимального значения
Wj=Yj-Y1

- вычисление коэффициентов нелинейной обработки KR для подавления пассивной помехи в зависимости от текущих значений дальности R. Если выполняется условие R>RП (RП - пороговое значение дальности), то КR=А; если данное условие не выполняется, то KR=B/R2. Значения коэффициентов А и В, а также пороговое значение дальности RП подбираются на этапе обучения алгоритма.
- преобразование вариационного ряда {Wj} в другой вариационный ряд по формуле 

- выделение в ряду {Pj} неоднородной части по правилу
Реализация данного правила осуществляется через проверку условия Pn+1≥S1 (условие “неоднородность”), где  - однородная часть ряда {Pj}, на наличие или отсутствие в вариационном ряду неоднородности. В зависимости от выполнения этого условия возможны два варианта последующих вычислений.
- однородная часть ряда {Pj}, на наличие или отсутствие в вариационном ряду неоднородности. В зависимости от выполнения этого условия возможны два варианта последующих вычислений.
В первом варианте, когда условие “неоднородность” выполняется для данного значения n (исходное значение n=3), вычисляется сумма 
(неоднородная часть ряда {Pj}) и находится отношение U=S2/S1, значение которого поступает на выход блока 6 вычислений.
Во втором варианте, когда условие “неоднородность” не выполняется при данном n, значение n увеличивается на 1, и вновь осуществляется проверка условия “неоднородность”. Если условие “неоднородность” не выполняется для всех n, т.е.  , то неоднородная часть считается равной нулю и на выход блока 6 вычислений поступает значение U=0.
, то неоднородная часть считается равной нулю и на выход блока 6 вычислений поступает значение U=0.
В устройстве сравнения 7 поступающие на его вход значения U сравниваются с пороговым значением UП=1. При превышении величиной U порогового значения на выход устройства сравнения 7, являющийся выходом устройства, поступает значение, равное 1, соответствующее принятию решения о принадлежности объекта к классу “объект с вращающимися элементами”. Если величина U не превышает порогового значения, на выход устройства поступает значение, равное 0, соответствующее принятию решения о принадлежности объекта к классу “объект без вращающихся элементов”.
По сравнению с прототипом предлагаемое устройство позволяет достаточно эффективно распознавать объекты с вращающимися элементами, например вертолеты, винтовые самолеты, на фоне пассивных помех в РЛС с относительно низкой частотой повторения импульсов (порядка 2000 Гц) и малым временем распознавания - десятки мс.
Моделирование, выполненное авторами, показало, что при частоте повторения зондирующих импульсов fП порядка 2000 Гц, количестве импульсов в пачке не менее fП/m· v (m и v - соответственно число и частота вращения лопастей винта воздушного объекта), числе когерентно накапливаемых импульсов в подпачке N=8 распознаваемой пачки сигнала при среднем уровне мощности помехи 40-70 дБ на дальностях до 100 км возможно распознавание вертолета с вероятностью не хуже 0,8 (Фиг.4, кривые 1 и 2).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения характеристик случайного процесса | 1985 |
|
SU1317456A2 |
| СПОСОБ РАСПОЗНАВАНИЯ РАДИОЛОКАЦИОННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2312370C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2000 |
|
RU2170444C1 |
| АКУСТИЧЕСКИЙ ИЗМЕРИТЕЛЬ РАССТОЯНИЯ | 2005 |
|
RU2297646C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2084922C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1998 |
|
RU2131612C1 |
| СПОСОБ РАСПОЗНАВАНИЯ РАДИОЛОКАЦИОННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2317568C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ГРУППЫ ОДНОТИПНЫХ МАЛОРАЗМЕРНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2787843C1 |
| Устройство для определения характеристик случайного процесса | 1987 |
|
SU1479939A2 |
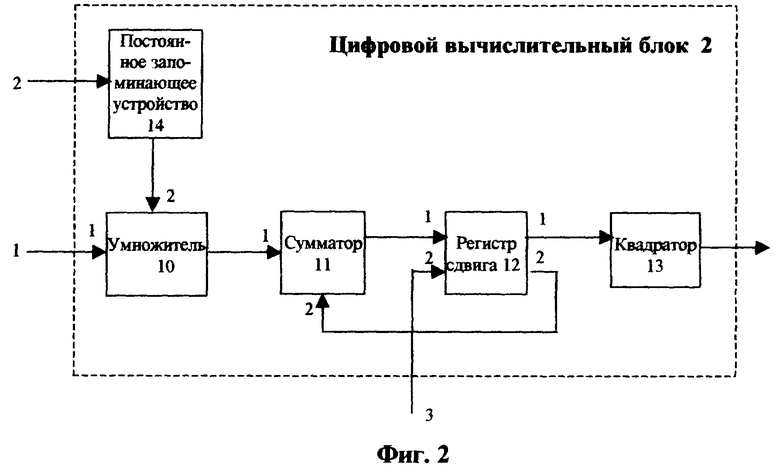
Устройство может быть использовано в области радиолокационной техники для распознавания объектов с вращающимися элементами (вертолетов, винтовых самолетов). Достигаемый технический результат - распознавание указанных объектов с помощью РЛС обнаружения с относительно низкой частотой повторения зондирующих импульсов (порядка 2000 Гц) и малым временем контакта с объектом (десятки мс) в условиях интенсивных пассивных помех. С помощью соответствующей обработки в частотной и временной областях распознаваемой пачки импульсов выделяют в принимаемом сигнале неоднородную часть, характеризующую попадание главного максимума диаграммы вторичного излучения вращающегося элемента во временное окно, занимаемое распознаваемой пачкой импульсов, что позволяет выполнить эффективное распознавание объекта. Устройство содержит аналого-цифровой преобразователь (1), цифровые вычислительные блоки (ЦВБ) (2/1-2/N), оперативное запоминающее устройство (3), устройство сравнения (7), блок управления (8), мультиплексор (4), устройство ранжирования (5), блок вычислений (6), инвертор (9). ЦВБ содержит квадратор (13), умножитель (10), сумматор (11), постоянное запоминающее устройство (14) и регистр сдвига (12). Блок управления содержит генератор тактовых импульсов (15), счетчики импульсов (16/1-16/3), схему И (17). 4 ил.
Устройство для распознавания случайных сигналов, содержащее аналого-цифровой преобразователь, вход которого является первым входом устройства, цифровой вычислительный блок (ЦВБ), содержащий квадратор и последовательно соединенные умножитель, первый вход которого является первым входом ЦВБ, и сумматор, оперативное запоминающее устройство, а также содержащее устройство сравнения и блок управления, содержащий генератор тактовых импульсов и счетчик импульсов, отличающееся тем, что, введены (N-1) ЦВБ, где N определяется частотой повторения зондирующих импульсов и временем наблюдения в одном угловом направлении луча диаграммы направленности антенны, последовательно соединенные мультиплексор, устройство ранжирования и блок вычислений, а также инвертор, причем первые входы N ЦВБ подключены к выходу аналого-цифрового преобразователя, а их выходы к соответствующим входам оперативного запоминающего устройства, N выходов которого соединены с соответствующими входами мультиплексора; первый выход блока управления подключен ко вторым входам N ЦВБ, второй выход - к управляющему входу мультиплексора, третий выход - к третьим входам N ЦВБ и второму входу устройства ранжирования, четвертый выход - к входу считывания мультиплексора, третьему входу устройства ранжирования и через инвертор к четвертому входу устройства ранжирования, выход которого соединен с первым входом блока вычислений, второй вход которого является вторым входом устройства, а выход соединен с входом устройства сравнения, выход которого является выходом всего устройства; кроме того, в каждый ЦВБ введены постоянное запоминающее устройство, вход которого является вторым входом ЦВБ, а выход постоянного запоминающего устройства подключен ко второму входу умножителя, и регистр сдвига, первый вход которого соединен с выходом сумматора, второй вход регистра сдвига является третьим входом ЦВБ, первый выход регистра сдвига подключен к входу квадратора, выход которого является выходом ЦВБ, а второй выход регистра сдвига - ко второму входу сумматора; кроме того, в блок управления введены последовательно соединенные второй и третий счетчики импульсов и схема И, первый вход которой соединен с входом первого счетчика и подключен к выходу генератора тактовых импульсов, выход первого счетчика соединен с входом второго счетчика, второй выход которого является первым выходом блока управления; первый выход третьего счетчика является вторым выходом блока управления, а второй выход - третьим выходом блока управления и соединен со вторым входом схемы И, выход которой является четвертым выходом блока управления и подключен ко второму входу третьего счетчика.
| Устройство для распознавания случайных сигналов | 1980 |
|
SU928374A1 |
| УСТРОЙСТВО ЛОГИЧЕСКОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1998 |
|
RU2149420C1 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1997 |
|
RU2109306C1 |
| ДОПЛЕРОВСКОЕ РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ ТУРБОВИНТОВЫХ САМОЛЕТОВ | 1992 |
|
RU2020516C1 |
| US 4389647, 21.06.1983 | |||
| DE 4243527 A1, 25.01.1996 | |||
| US 5689268 A, 18.11.1997 | |||
| ПРИМЕНЕНИЕ НОВЫХ СЛОЖНЫХ ЭФИРОВ ЭТОНОГЕСТРЕЛА | 2003 |
|
RU2322986C2 |
| НЕБАБИН В.Г | |||
| и др | |||
| Методы и техника радиолокационного распознавания | |||
| - М.: Радио и связь, 1984, с.135-141. | |||

